Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ НАВИГАЦИЕЙ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО НА ЕЕ ОСНОВЕ (ВАРИАНТЫ)
Вид РИД
Изобретение
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится в целом к интерфейсу средств управления навигацией и, в частности, к аппаратному интерфейсу между системой управления транспортным средством и системой управления навигацией.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Как известно, в складских помещениях используются вильчатые погрузчики и/или другие транспортные средства для перемещения различных грузов внутри склада. Соответственно, многие решения принимает оператор транспортного средства, который определяет, какие грузы и в какие места необходимо перемещать. Хотя операторы транспортных средств могут осуществлять их навигацию для выполнения поставленных задач, однако использование операторов составляет существенную часть затрат по перемещению грузов внутри склада.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0003] В заявке описаны системы и способы обеспечения интерфейса средств управления навигацией транспортного средства. Некоторые варианты осуществления изобретения содержат навигационную систему и транспортное средство с модулем управления транспортным средством (VCM), модулем управления навигацией (NCM) и интерфейсом средств управления навигацией, причем модуль VCM принимает команду ручного управления от оператора для ее выполнения в режиме ручного управления. В некоторых вариантах модуль NCM принимает из навигационной системы команду автоматического управления для ее выполнения посредством модуля VCM, и интерфейс средств управления навигацией непосредственно соединяет модули VCM и NCM для обеспечения обмена информацией между ними для осуществления режима автоматического управления и для передачи сообщений об осуществлении режима ручного управления.
[0004] В изобретении также предлагаются варианты транспортного средства. Транспортное средство может содержать модуль управления транспортным средством (VCM), модуль управления навигацией (NCM), аппаратный интерфейс, модуль управления тягой (ТСМ) и модуль рулевого управления (SCM). В некоторых вариантах модуль VCM принимает команду ручного управления от оператора для ее выполнения в
режиме ручного управления, обеспечивает выполнение этой команды и передает информацию, относящуюся к этой команде, в модуль NCM. Аналогично, в некоторых вариантах модуль NCM принимает из навигационной системы команду автоматического управления для ее выполнения посредством модуля VCM, передает информацию, относящуюся к этой команде, в модуль VCM для ее выполнения, и аппаратный интерфейс непосредственно соединяет модули VCM и NCM для обеспечения обмена информацией между ними.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Рассмотренные в нижеприведенном описании варианты являются всего лишь иллюстрациями, которые не должны рассматриваться как ограничения объема изобретения, определяемого его формулой. Нижеприведенное подробное описание иллюстративных вариантов осуществления настоящего изобретения лучше всего можно понять при рассмотрении вместе с прилагаемыми чертежами, на которых одинаковые элементы указаны одинаковыми ссылочными номерами, и на которых показано:
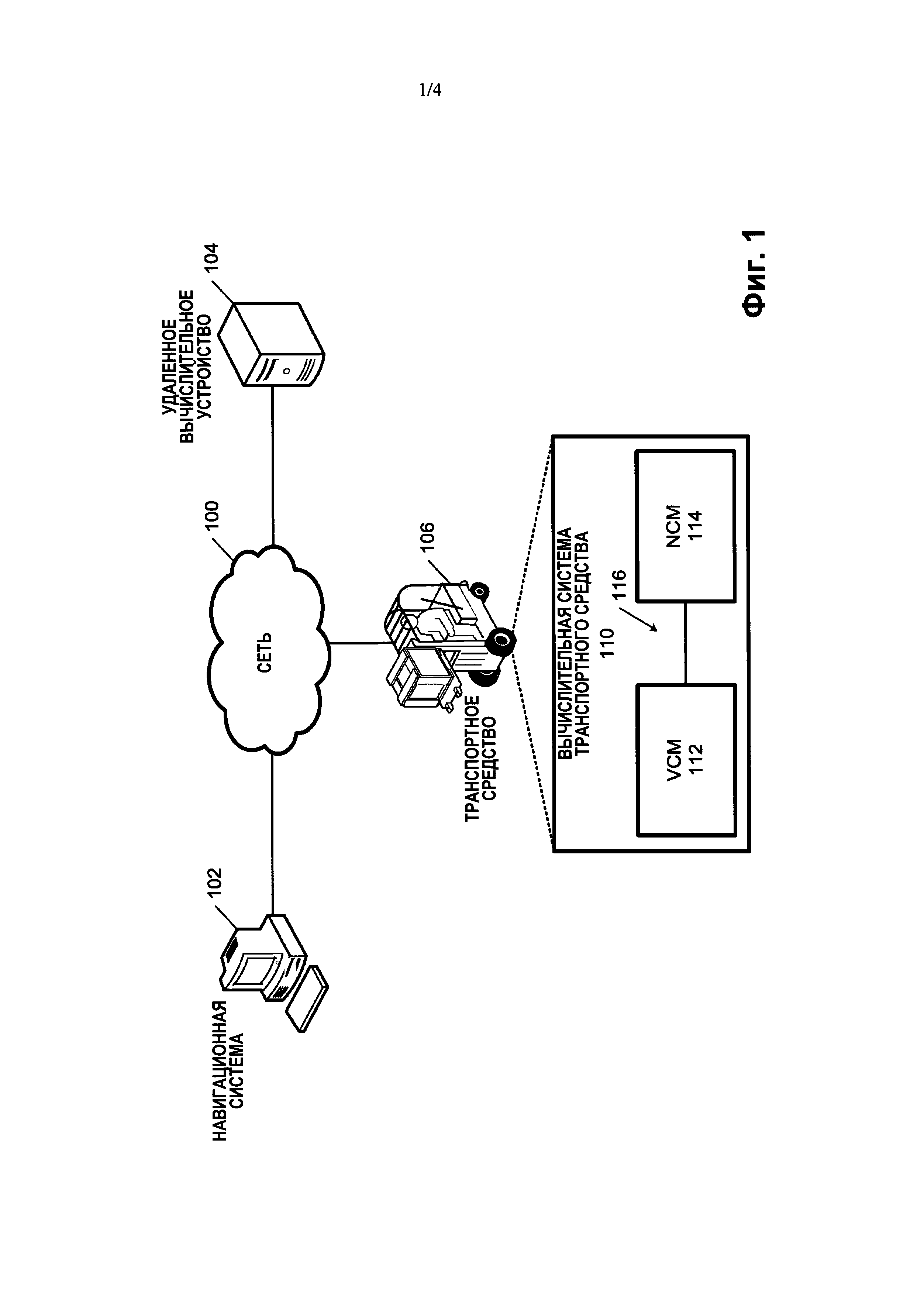
[0006] фигура 1 - схема вычислительных средств для использования интерфейса средств управления навигацией по одному или нескольким вариантам, рассмотренным в настоящем описании;
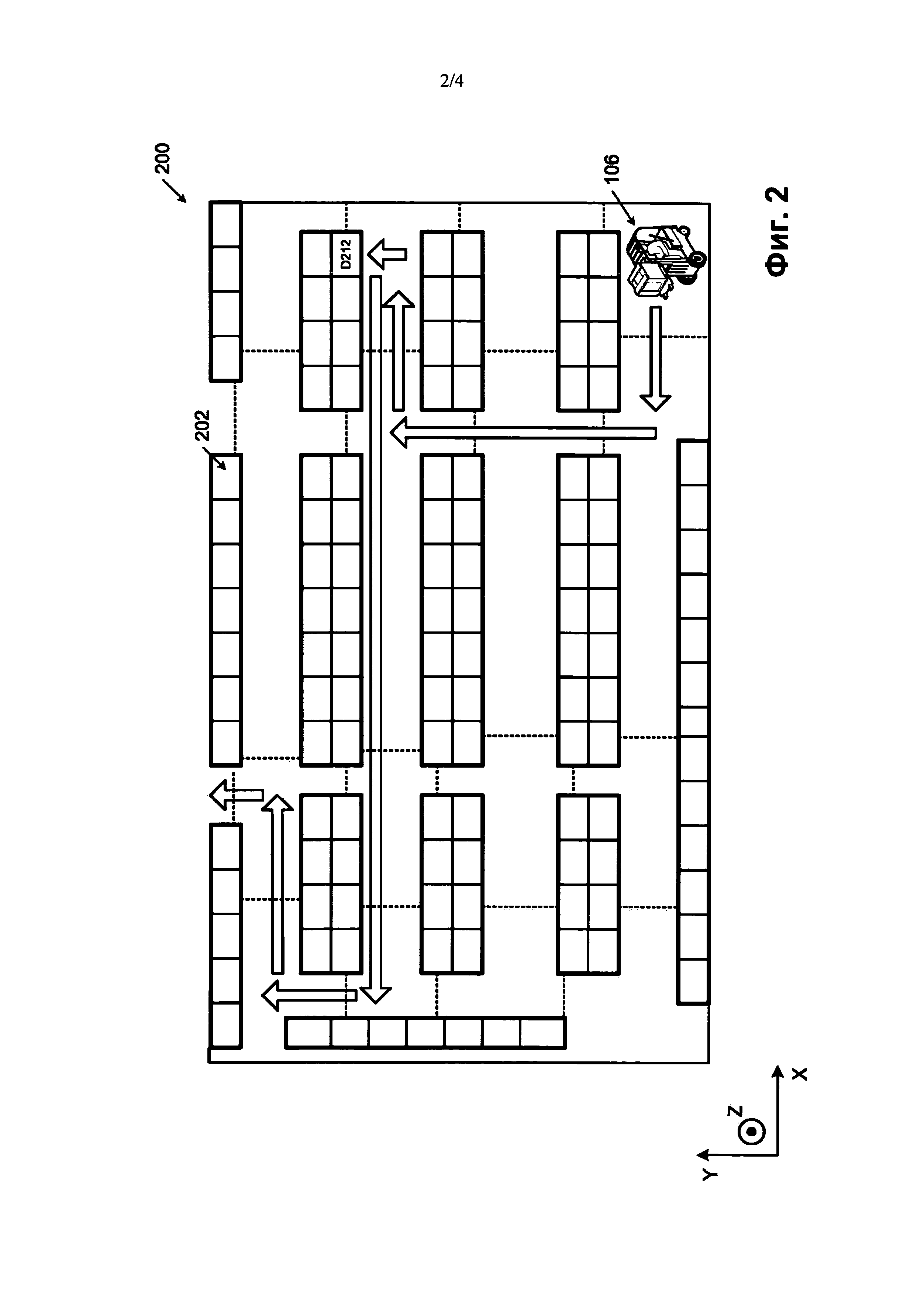
[0007] фигура 2 - схема физической среды, для которой обеспечивается навигация транспортного средства по одному или нескольким вариантам, рассмотренным в настоящем описании;
[0008] фигура 3 - схема соединений для вычислительной системы транспортного средства по одному или нескольким вариантам, рассмотренным в настоящем описании;
[0009] Фигура 4 - схема вычислительной системы для обеспечения алгоритма работы модуля управления транспортным средством по одному или нескольким вариантам, рассмотренным в настоящем описании.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0010] На фигуре 1 представлена схема вычислительных средств для использования интерфейса 116 средств управления навигацией, обеспечивающего обмен данными, по одному или нескольким вариантам, рассмотренным в настоящем описании. Как показано на схеме фигуры 1, связь между навигационной системой 102, удаленным вычислительным устройством 104 и транспортным средством 106 может обеспечиваться с помощью сети 100. Сеть 100 может представлять собой проводную и/или беспроводную локальную вычислительную сеть, глобальную вычислительную сеть и/или другой тип сети, обеспечивающей обмен информацией. Навигационная система 102 может быть сконфигурирована как сервер или другое вычислительное устройство и может быть расположена в складском помещении или в другом месте. Навигационная система 102 может быть сконфигурирована для передачи навигационной информации на транспортное средство 106 и/или приема от него навигационных данных. Дополнительно, удаленное вычислительное устройство 104, которое может быть реализовано в форме системы управления складом или другой системы, может быть сконфигурировано для обработки заданий, которые должны выполняться транспортными средствами. Эти задания могут определять местонахождение продукта, который необходимо переместить в другое место, и/или обеспечивать другую необходимую информацию. Получив информацию назначенного задания, навигационная система 102 и/или удаленное вычислительное устройство 104 может определить транспортное средство для выполнения этого задания. Навигационная система 102 может дополнительно определять порядок (приоритеты) выполнения заданий определенным транспортным средством 106. Навигационная система 102 может обмениваться информацией с транспортным средством 106 для определения его местонахождения. Имея информацию о местонахождении транспортных средств 106, навигационная система 102 может более эффективно назначать задания этим транспортным средствам. Кроме того, обмен информацией между навигационной системой 102 и транспортным средством 106 может включать передачу на транспортное средство 106 информации о пункте назначения и/или о маршруте. Информация о маршруте может содержать множество сегментов, которые могут включать линии и/или дуги пути, по которому должно пройти транспортное средство 106, чтобы из текущего местонахождения попасть в пункт назначения. Однако в некоторых вариантах транспортное средство 106 получает только координаты заданного пункта назначения и само определяет маршрут для перемещения в этот пункт назначения.
[0011] В систему входит также удаленное вычислительное устройство 104. Это устройство 104 также может быть сконфигурировано как сервер или другое вычислительное устройство для передачи в навигационную систему 102 назначенных заданий и/или другой информации. В некоторых вариантах удаленное вычислительное устройство 104 может находиться в том же помещении, что и навигационная система 102, а в других вариантах удаленное вычислительное устройство 104 и навигационная система 102 могут находиться в разных местах. Аналогично, в зависимости от конкретного варианта удаленное вычислительное устройство 104 может быть сконфигурировано для обслуживания одной или нескольких различных сред и для обмена информацией с несколькими разными навигационными системами.
[0012] Как показано на фигуре 1, система включает также транспортное средство 106. Транспортное средство 106 может быть складским транспортным средством, таким как, например, вильчатый погрузчик. Транспортное средство 106 может содержать одну или несколько систем управления: систему рулевого управления, тормозную систему, систему управления тягой и т.п. Транспортное средство 106 также содержит интерфейс пользователя, датчики определения местонахождения (лазерные датчики, оптические датчики и т.п.), а также вычислительную систему 110, которая может включать модуль 112 управления транспортным средством (VCM) и модуль 114 (NCM) управления навигацией. Как это будет описано ниже более подробно, модуль VCM 112 может обеспечивать оператору возможность управления транспортным средством 106 в ручном режиме. Модуль NCM 114 может быть сконфигурирован для обеспечения возможности работы транспортного средства 106 в автоматическом режиме управления. Обмен информацией между модулями VCM 112 и NCM 114 и координация их работы обеспечивается интерфейсом 116 средств управления навигацией.
[0013] На фигуре 2 представлена схема 200 физической среды, для которой обеспечивается навигация транспортного средства по одному или нескольким вариантам, рассмотренным в настоящем описании. Как показано на фигуре 2, схема 200 физической среды относится к складскому помещению, в котором размещены товары (грузы) 202. Товары могут быть расположены упорядочение не только по горизонтали на полу помещения (в направлениях осей Х и Y), но и по вертикали (в направлении оси Z). Как уже указывалось, транспортное средство 106 может работать в ручном режиме управления оператором, который вводит команды управления. Оператор может обеспечивать навигацию транспортного средства в ручном режиме для его перемещения в заданный пункт назначения, выполнение назначенного задания и переход к следующему заданию.
[0014] Если на транспортное средство 106 передана команда автоматического управления, оно может работать в автоматическом режиме, в котором выполняются команды автоматического управления. Таким образом, транспортное средство 106 может выполнять назначенные задачи без участия человека (оператора). В этом случае транспортное средство 106 может принимать из навигационной системы 102 один или несколько пунктов (или заданный маршрут). Имея эту информацию, транспортное средство 106 может перемещаться в заданный пункт назначения, выполнять назначенное задание и переходить к выполнению следующего задания.
[0015] В одном из примеров, если транспортное средство 106 работает в автоматическом режиме управления, оно может получить задание, пункт назначения (адрес D212) и/или маршрут, по которому можно попасть в этот пункт назначения. В соответствии с полученной информацией транспортное средство 106 может рассчитать маршрут для перемещения в заданный пункт назначения по адресу D212 и затем выполнить назначенное задание. В этом конкретном примере в соответствии с заданием транспортное средство 106 должно забрать груз, находящийся по адресу D212. Затем транспортное средство 106 из своего текущего местонахождения может осуществлять навигацию по намеченному маршруту с использованием датчиков и информации карты. В некоторых вариантах на транспортном средстве 106 может быть установлен оптический датчик. Оптический датчик может определять положение транспортного средства 106 относительно верхних светильников. В соответствии с этой информацией и/или с другой информацией (получаемой от лазерного датчика, от одометра и/или от других средств) транспортное средство 106 (и/или навигационная система 102) может определять, что оно находится на маршруте.
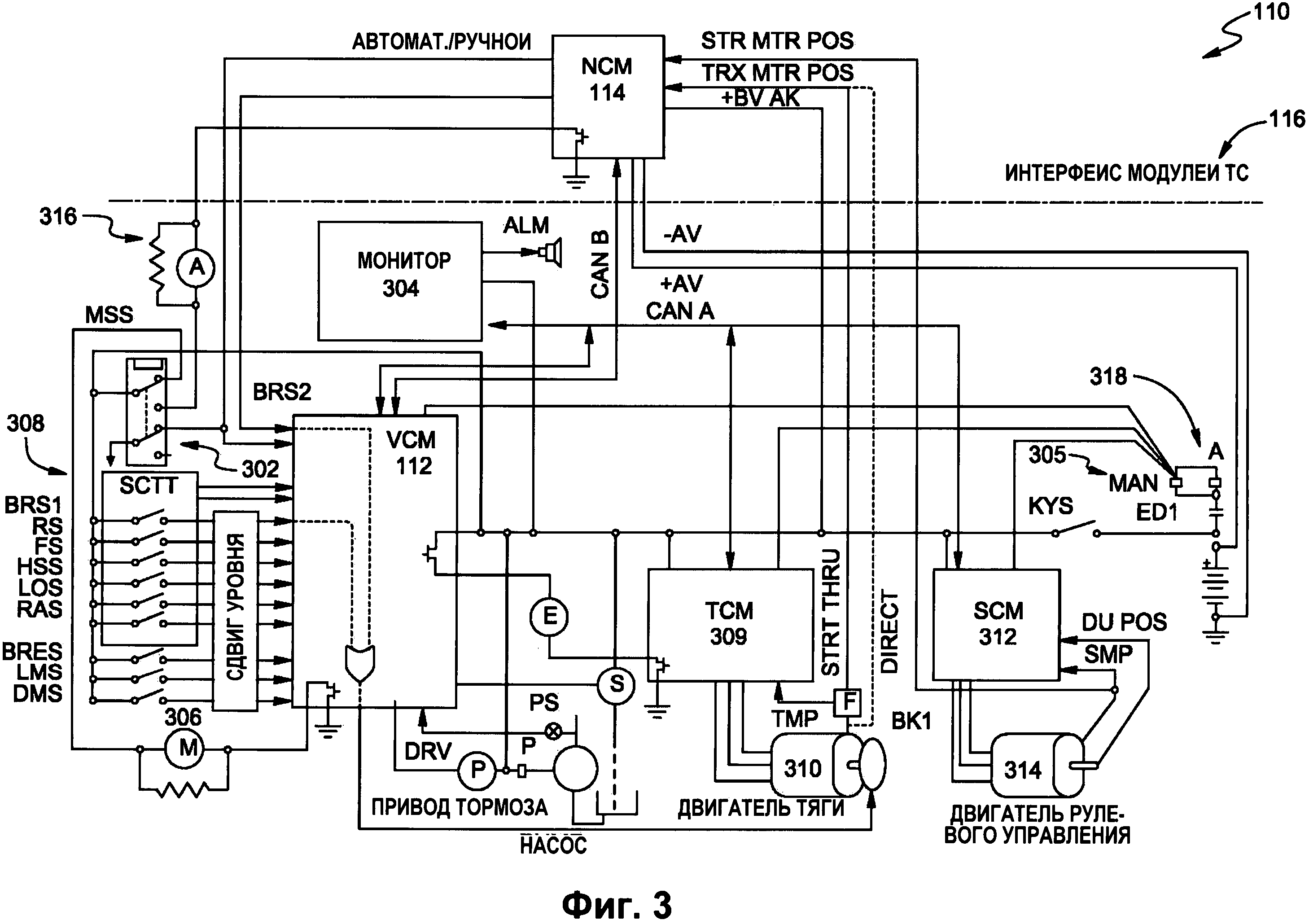
[0016] На фигуре 3 представлена схема электрических соединений для вычислительной системы 110 транспортного средства по одному или нескольким вариантам, рассмотренным в настоящем описании. Как показано на схеме, вычислительная система 110 транспортного средства содержит модули VCM 112 и NCM 114. Схема содержит также интерфейс 116 средств управления навигацией. Интерфейс 116 средств управления навигацией может быть выполнен в форме аппаратного интерфейса между компонентами транспортного средства 106 (и модуля VCM 112) и компонентами модуля NCM 114. Интерфейс 116 средств управления навигацией может обеспечивать один модуль VCM, который может использоваться на самых разных транспортных средствах, и/или модули NCM, которые требуют лишь небольшой начальной настройки. В частности, поскольку интерфейс 116 средств управления навигацией обеспечивает непосредственный обмен информацией между модулями VCM 112 и NCM 114, в специальной настройке модуля VCM нет необходимости. Как показано на схеме, вычислительная система 110 транспортного средства содержит шину CAN А и шину CAN В. Шина CAN A обеспечивает обмен информацией между монитором 304, модулем VCM 112, модулем 308 управления тягой (ТСМ) и модулем 312 рулевого управления (SCM), который сконфигурирован для приема и выполнения команд управления направлением движения транспортного средства. Аналогично, шина CAN В является частью интерфейса 116 средств управления навигацией, которая соединяет модули VCM 112 и NCM 114. Как это будет описано ниже более подробно, шина CAN В обеспечивает обмен сообщениями между модулями VCM 112 и NCM 114.
[0017] Вычислительная система 110 транспортного средства содержит также переключатель 302 режимов работы (MSS). Переключатель MSS 302 может содержать две двухпозиционные контактные группы для задания ручного или автоматического режима работы. В другом варианте транспортное средство 304 может быть снабжено монитором 304, который может служить в качестве интерфейса, обеспечивающего оператору возможность задания ручного или автоматического режима работы. Однако это всего лишь пример, поскольку в некоторых вариантах для такого задания может использоваться физический переключатель. В любом случае после задания ручного режима работы переключающее устройство MSS 302 перебрасывает подвижные элементы двух двухпозиционных контактных групп в верхнее положение (как показано на фигуре 3). Когда двухпозиционные контактные группы находятся в этом положении, напряжение батареи подается на катушку 306 ручного управления для обеспечения возможности модулю VCM 112 включения катушки 306 путем заземления одного конца схемы, в результате чего включается электромагнитный пускатель 305 ручного режима, так что мощность из шины может подаваться на контроллеры двигателей (модули ТСМ 309, SCM 312) для выполнения команд управления движением транспортным средством. Комбинированный переключатель SCTT 308 может обеспечивать прием команд оператора в форме переключателя тормозов (BRS1), переключателя заднего хода (RS), переключателя переднего хода (FS), переключателя спуска (LOS), переключателя подъема (RAS), аварийного размыкателя (DMS), переключателя высокой скорости (HSS), переключателя режима работы оператора (LMS) и переключателя ограничителя батареи (BRES). Также в зависимости от конкретного применения может использоваться устройство сдвига уровня для обеспечения подачи команд в модуль VCM 112. Команды ручного управления, поступающие из модуля VCM 112, могут обрабатываться и преобразовываться в команду вращающего момента или скорости и передаваться в модуль ТСМ 309, который соединен с двигателем 310 тяги. Модуль ТСМ 309 может работать в качестве контроллера двигателя и поэтому обеспечивает сигнал мощности, который характеризуется напряжением и частотой, непосредственно в двигатель транспортного средства 106. Аналогично, команды ручного управления могут обрабатываться и преобразовываться в команды скорости или положения и передаваться в модуль SCM 312, который соединен с двигателем рулевого управления. В этом режиме модуль VCM 112 может обеспечивать работу транспортного средства 106 в ручном режиме.
[0018] Аналогично, в случае задания автоматического режима работы, например, с помощью переключателя MSS 302, этот переключатель изменяет положение двух двухпозиционных контактных групп. Когда двухпозиционные контактные группы переведены в режим автоматического управления, напряжение батареи подается на катушку 316 автоматического режима для обеспечения модулю NCM 114 возможности включения катушки 316 путем заземления одного конца схемы, в результате чего включается электромагнитный пускатель 318 автоматического режима.
[0019] Следует понимать, что в схеме, приведенной на фигуре 3, указаны лишь модули ТСМ 309 и SCM 312, однако это всего лишь примеры. В зависимости от конкретного варианта в схему могут быть включены и другие компоненты для управления различными функциями транспортного средства 106.
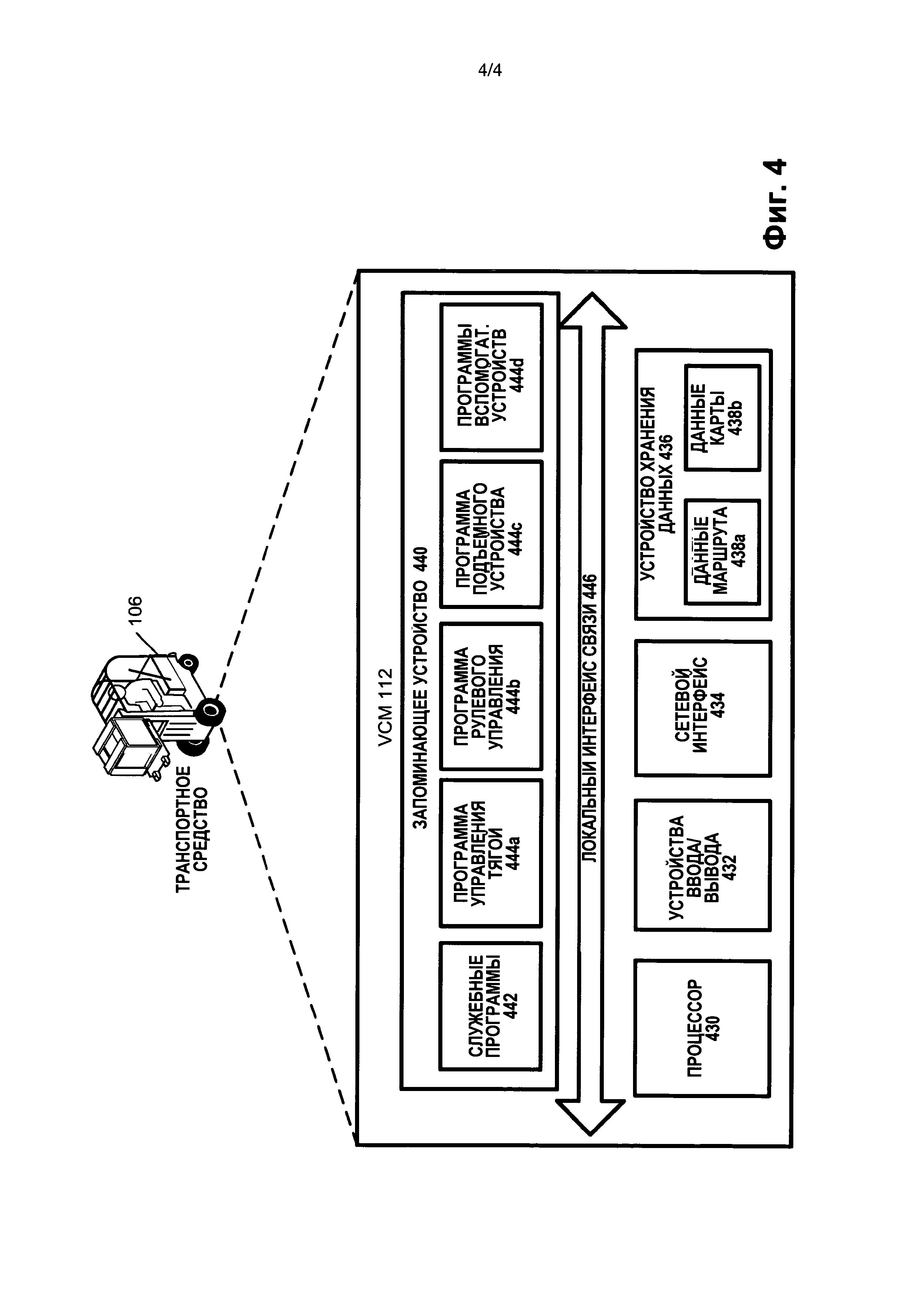
[0020] На фигуре 4 приведена схема вычислительной системы для обеспечения алгоритма работы модуля 112 управления транспортным средством (VCM) по одному или нескольким рассмотренным вариантам, рассмотренным в настоящем описании. В рассматриваемом варианте модуль VCM 112 содержит процессор 430, устройство 432 ввода/вывода, устройство 436 хранения данных (в нем записана информация 438а о маршруте, информация 438b карты и/или другие данные) и запоминающее устройство 440. Запоминающее устройство 440 может быть энергозависимым и/или энергонезависимым устройством и может включать оперативное запоминающее устройство (включая статическое ОЗУ с произвольной выборкой, динамическое ОЗУ с произвольной выборкой и другие типы ОЗУ), флэш-память, защищенное ЗУ, регистры, компакт-диски, диски DVD и другие машиночитаемые носители информации. В зависимости от конкретного варианта машиночитаемый носитель информации может находиться внутри модуля VCM 112 и/или снаружи.
[0021] Кроме того, запоминающее устройство 440 может содержать служебные программы 442, программу 444а управления тягой, программу 444b рулевого управления, программу 444 с управления подъемом груза и программу 444d управления вспомогательными приспособлениями. Служебные программы 442 могут включать операционную систему и/или другие программы для управления работой компонентов модуля VCM 112. Программа 444а управления тягой может содержать несколько алгоритмов управления тягой и различные параметры для обеспечения оптимального управления тягой транспортного средства 106. Программа 444b рулевого управления может содержать несколько алгоритмов управления направлением движения и различные параметры для обеспечения оптимального управления направлением движения транспортного средства 106. Программа 444 с управления подъемом груза может содержать несколько алгоритмов и различные параметры для обеспечения оптимального управления подъемными операциями транспортного средства 106. Дополнительно, программа 444d управления вспомогательными приспособлениями может содержать несколько алгоритмов и различные параметры для обеспечения управления вспомогательными приспособлениями транспортного средства 106. На фигуре 4 также показан локальный интерфейс 446 связи, который может быть реализован как шина или другой коммуникационный интерфейс для обеспечения обмена информацией между компонентами модуля VCM 112.
[0022] Процессор 430 может содержать любой компонент обработки информации, способный принимать и выполнять команды, например, из устройства 436 хранения данных и/или из запоминающего устройства 440. Устройство 432 ввода/вывода может быть сконфигурировано для сопряжения с монитором, позиционирующим устройством, клавиатурой, сенсорным экраном, мышью, принтером, устройством получения изображений, микрофоном, громкоговорителем, гироскопом, компасом и/или другими устройствами для приема, передачи и/или представления данных. Сетевой интерфейс 434 может включать любое проводное или беспроводное сетевое оборудование, включая антенну, модем, LAN-порт, карту Wi-Fi, карту WiMax, оборудование мобильной связи и/или другое оборудование для обмена информацией с другими сетями и/или устройствами. Сетевой интерфейс 434 может обеспечивать связь между модулем VCM 112 и другими вычислительными устройствами.
[0023] Следует понимать, что компоненты, показанные на фигуре 4, являются всего лишь примерами и не должны рассматриваться как ограничения объема настоящего изобретения. Компоненты на фигуре 4 показаны находящимися внутри модуля VCM 112, однако это всего лишь пример. В некоторых вариантах один или несколько компонентов могут находиться снаружи модуля VCM 112. Следует также понимать, что хотя модуль VCM 112 показан на фигуре 4 как одно устройство, это всего лишь пример. В некоторых вариантах программа 444а управления тягой, программа 444b рулевого управления, программа 444 с управления подъемом груза и/или программа 444d управления вспомогательными приспособлениями могут находиться в разных устройствах. Кроме того, хотя модуль VCM 112 показан с программой 444а управления тягой, программой 444b рулевого управления, программой 444 с управления подъемом груза и программой 444d управления вспомогательными приспособлениями, реализованными как отдельные компоненты, это всего лишь пример. В некоторых вариантах все вышеуказанные функциональные возможности могут быть обеспечены в модуле VCM 112 одной программой. Аналогичные компоненты и алгоритмы могут быть также включены в модуль NCM 114, в навигационную систему 102 и в удаленное вычислительное устройство 104 для обеспечения вышеуказанных функциональных возможностей.
[0024] Следует также понимать, что модуль VCM 112 может обмениваться информацией с модулем NCM 114 через интерфейс 116 средств управления навигацией для координации различных условий ручного и автоматического режимов управления транспортным средством (ТС) 106. В Таблицах 1-8 приведены примеры данных, которые могут быть переданы из модуля VCM 112 в модуль NCM 114.
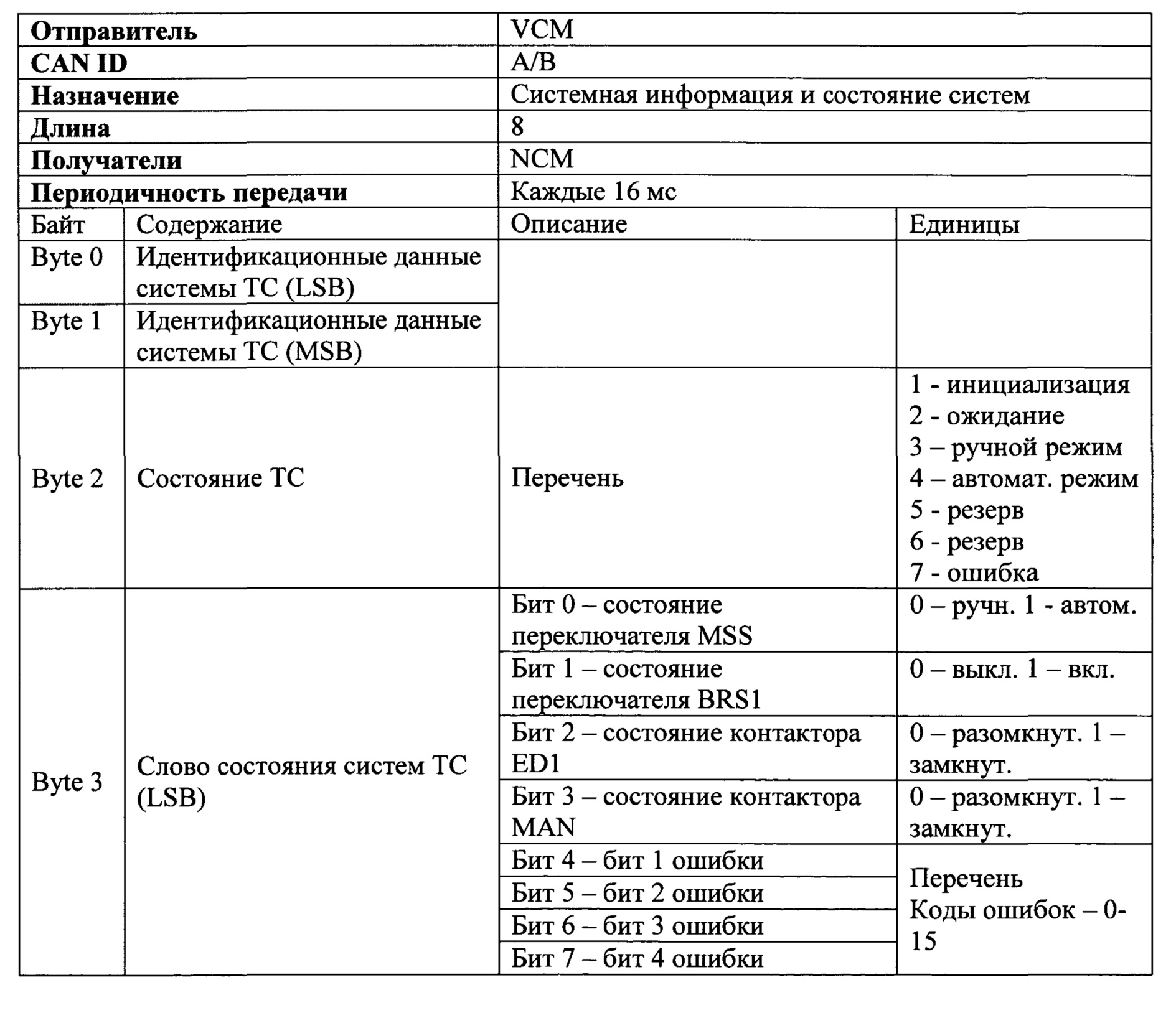
[0025] В Таблице 1 описывается передача информации по транспортному средству из модуля VCM 112 в модуль NCM 114 непосредственно через интерфейс 116 средств управления навигацией (фигура 1). Соответственно, модуль VCM 112 может передавать пакет данных или поток, который содержит множество байтов данных (например, 4, 8, 16, 32 байтов и т.д.). В примере, который иллюстрируется в Таблице 1, данные структурированы как 8-байтные сообщения, причем байты 0 и 1 содержат идентификатор транспортного средства. Байт 2 может использоваться для обеспечения состояния транспортного средства. Например, в качестве первого состояния может быть определена инициализация, а ожидание, ручной и автоматический режимы работы могут быть определены как дополнительные состояния транспортного средства. Если в состоянии транспортного средства имеется ошибка, то для такого случая может быть назначена конфигурация байта.
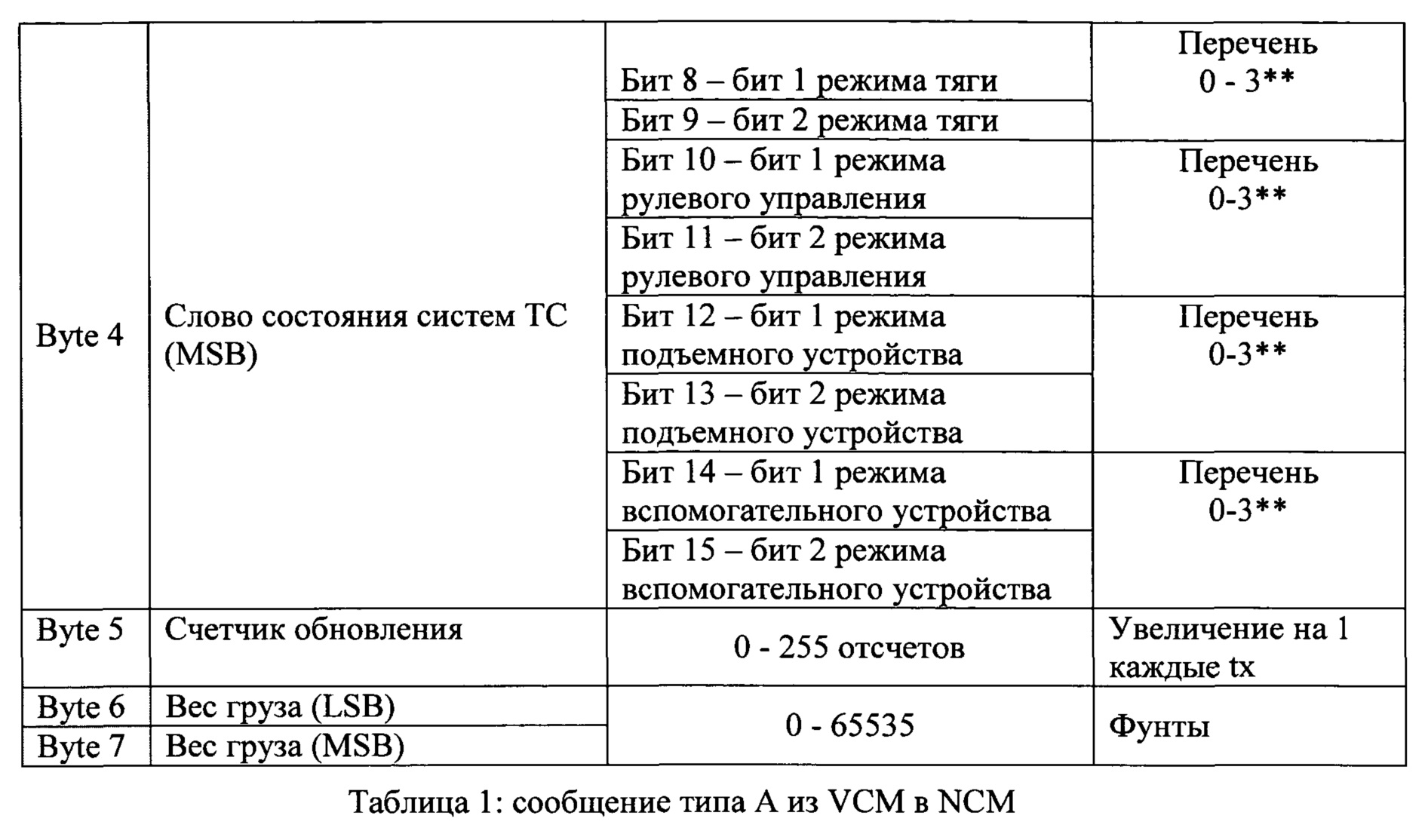
[0026] Аналогично, байты 3 и 4 могут использоваться для указания состояния систем транспортного средства. Например, бит 0 может использоваться для состояния коммутатора MSS 302 (ручной/автоматический). Бит 1 может использоваться для определения состояния переключателя BRS1 (тормоза, вкл./выкл.). Бит 2 может использоваться для определения состояния электромагнитного пускателя (контактора) ED1 (разомкнут/замкнут). Бит 3 может использоваться для определения состояния контактора 305 ручного режима. Аналогично, байт 4 может использоваться для определения функционального режима, такого как режим тяги, режим рулевого управления, режим работы подъемного устройства и режим работы вспомогательных приспособлений. Биты 4-7 могут использоваться для различных кодов ошибок (до 15). Байт 5 может использоваться для счетчика обновления, и байты 6, 7 могут использоваться для определения веса груза на вильчатом захвате.
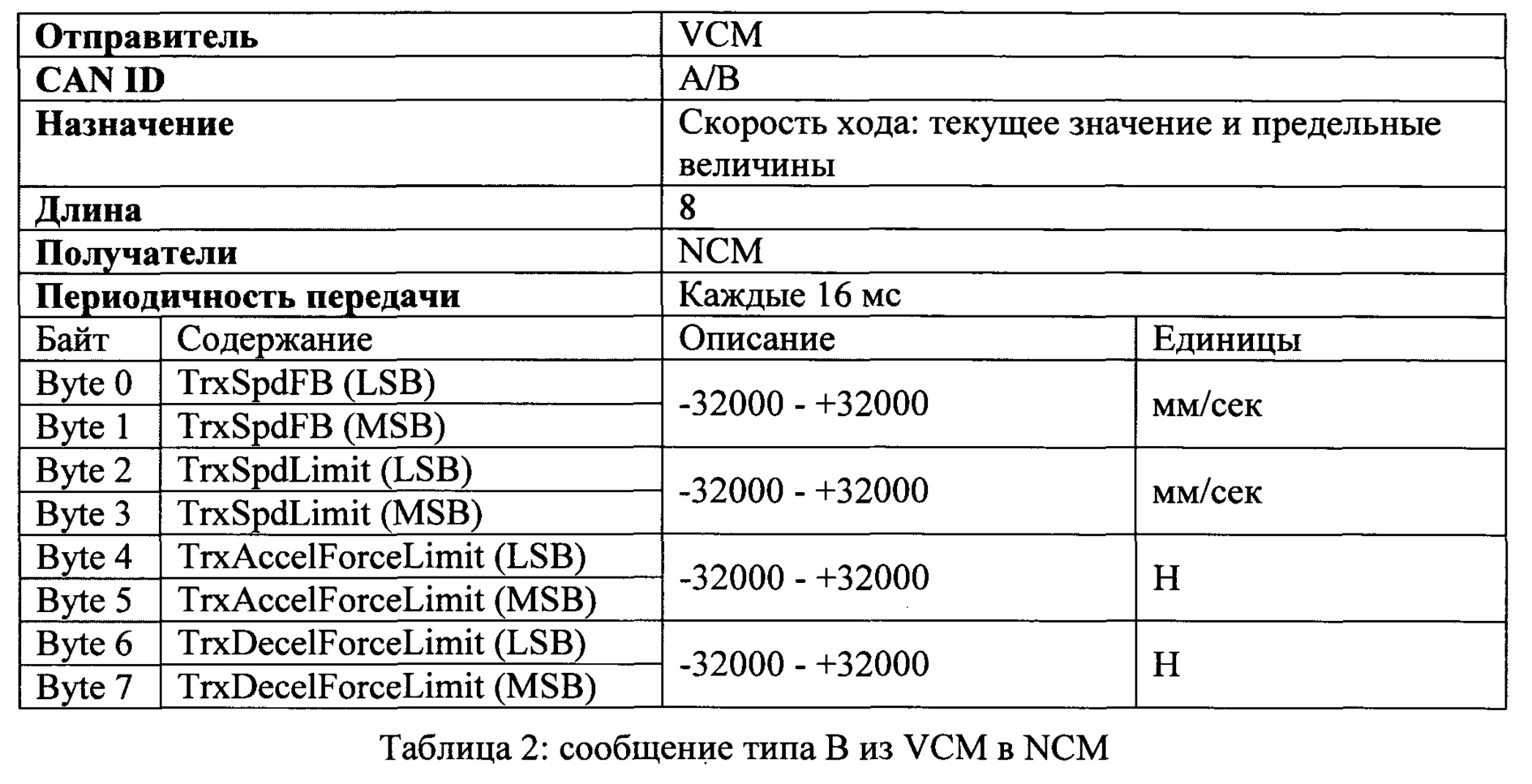
[0027] В Таблице 2 указаны данные, относящиеся к тяге, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу 116 средств управления навигацией. В частности, сообщение, описанное в Таблице 2, содержит текущее значение скорости хода и предельные величины для транспортного средства. Аналогично, в Таблице 2 указано, что данные передаются в 8-байтном сообщении, однако это всего лишь пример. Как указано в Таблице 2, байты 0 и 1 используются для текущего значения скорости хода. Байты 2 и 3 могут использоваться для указания предельной величины скорости хода. Байты 4 и 5 могут использоваться для указания предельной величины силы ускорения, создаваемой тягой. Байты 6 и 7 могут использоваться для указания предельной величины силы замедления, создаваемой тягой.
[0028] В частности, байты 0 и 1, относящиеся к текущему значению скорости хода, могут передаваться из модуля VCM 112 в модуль NCM 114 для указания текущей скорости и/или состояния тяги транспортного средства 106. На транспортное средство 106 могут накладываться и другие ограничения (предельные величины параметров). Эти предельные величины могут включать предельную скорость, предельное ускорение и/или предельное замедление.
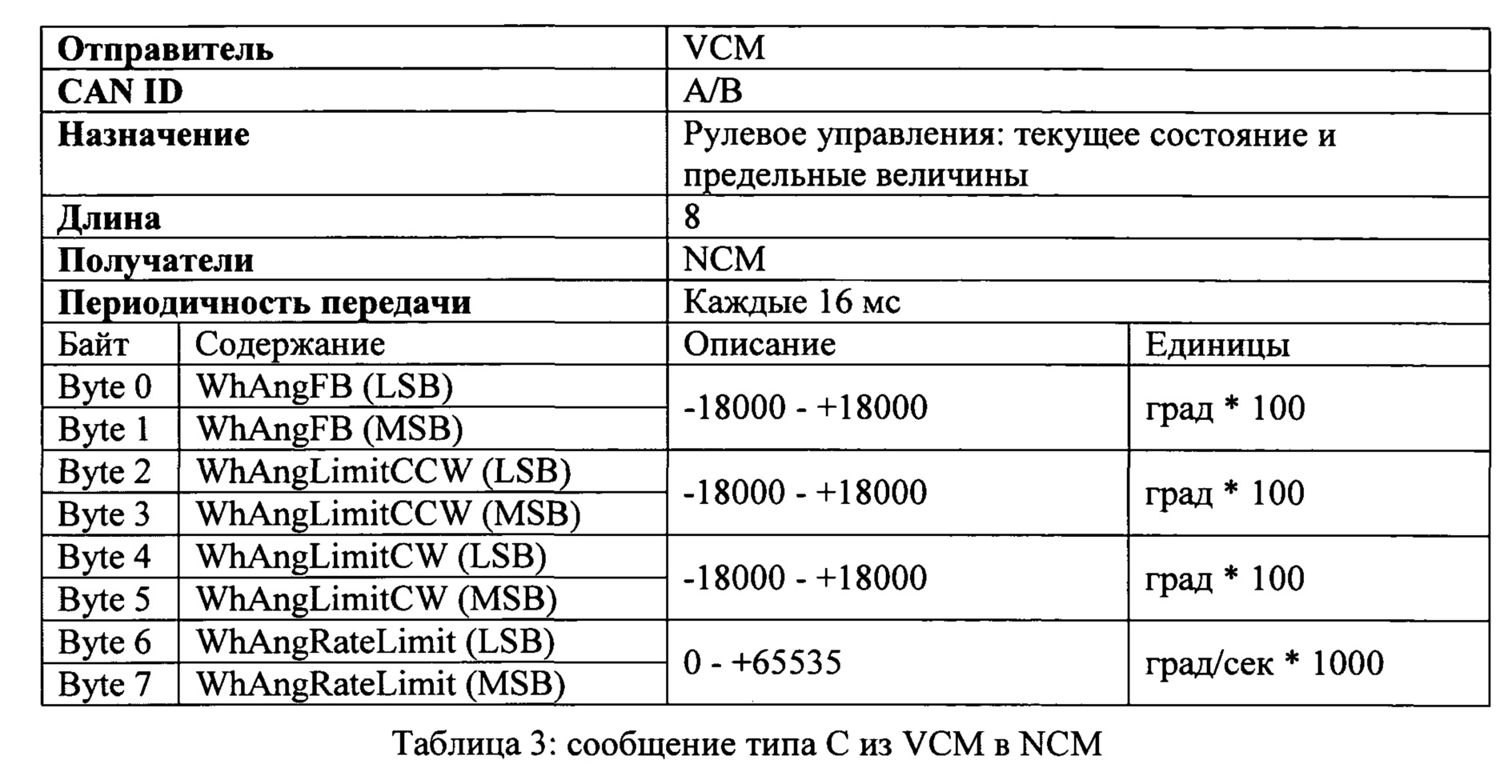
[0029] В Таблице 3 указаны данные, относящиеся к системе рулевого управления, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу 116 средств управления навигацией. В частности, байты 0 и 1 могут использоваться для обеспечения текущего значения угла поворота колеса транспортного средства. Байты 2 и 3 могут использоваться для указания предельной величины угла поворота колеса против часовой стрелки. Байты 4 и 5 могут использоваться для указания предельной величины угла поворота колеса по часовой стрелке. Байты 6 и 7 могут использоваться для указания предельной величины скорости поворота колеса.
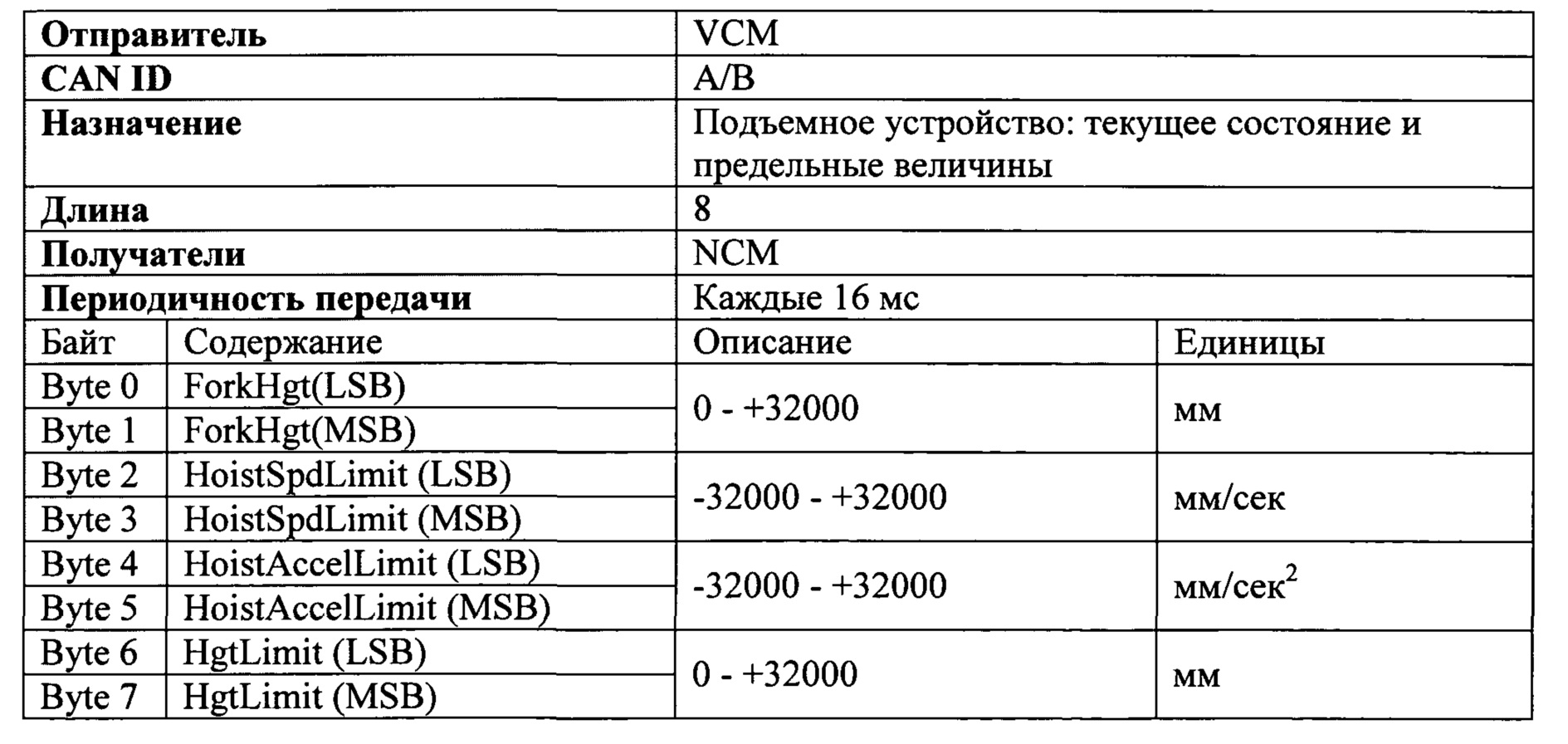

[0030] В Таблице 4 указаны данные, относящиеся к подъемному устройству, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу 116 средств управления навигацией. В частности, данные в составе сообщения относятся к текущему состоянию вильчатого захвата. Соответственно, байты 0 и 1 могут использоваться для указания текущей высоты вильчатого захвата транспортного средства 106. Байты 2 и 3 могут использоваться для указания предельной величины скорости вильчатого захвата транспортного средства 106. Байты 4 и 5 могут использоваться для указания предельной величины ускорения вильчатого захвата. Байты 6 и 7 могут использоваться для указания предельной величины высоты подъема вильчатого захвата.
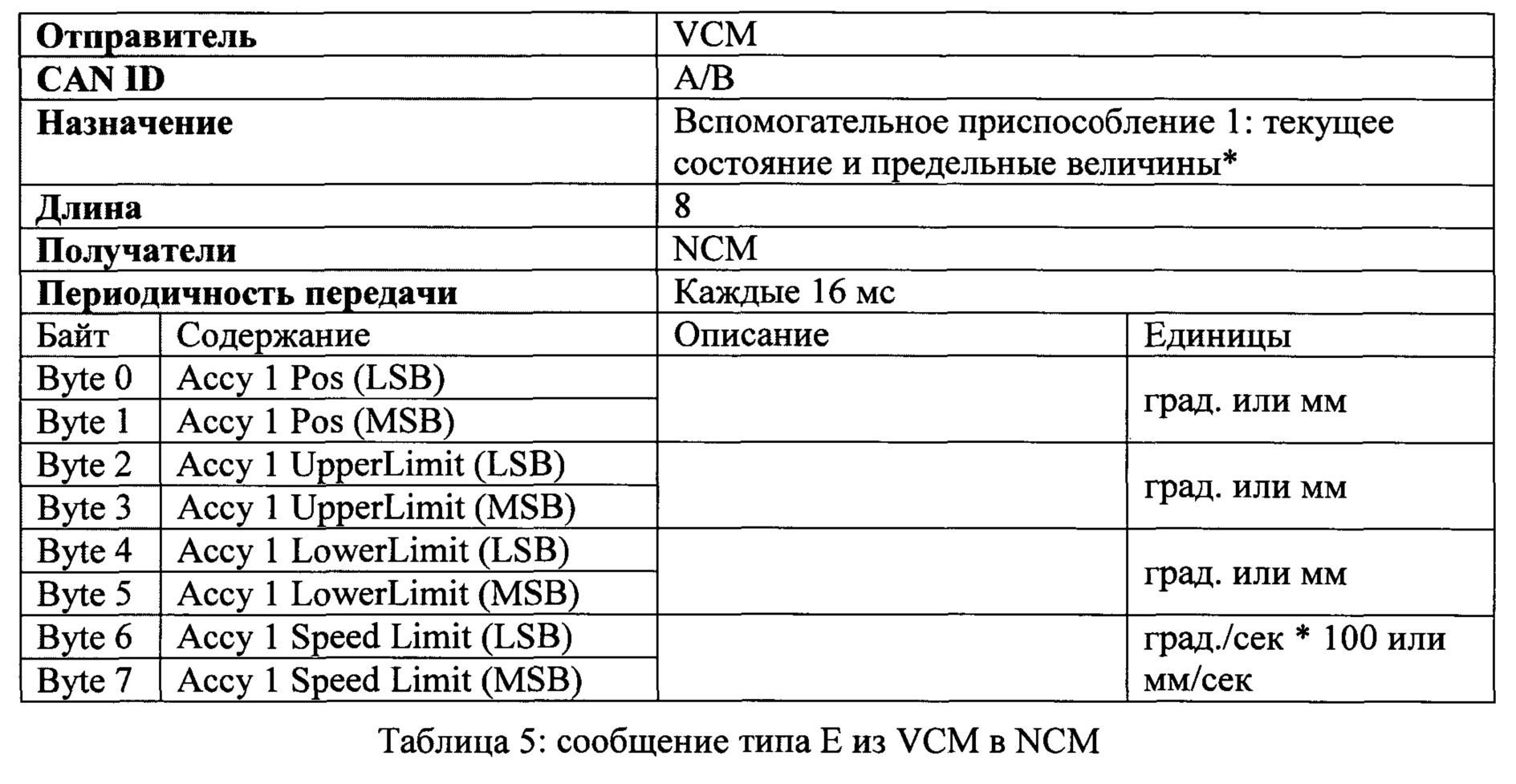
[0031] В Таблице 5 указаны данные, относящиеся к вспомогательному приспособлению транспортного средства, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу 116 средств управления навигацией. В частности, байты 0 и 1 могут использоваться для указания текущего положения вспомогательного приспособления на транспортном средстве 106. Байты 2 и 3 могут использоваться для указания предельного верхнего положения вспомогательного приспособления транспортного средства 106. Байты 4 и 5 могут использоваться для указания предельного нижнего положения вспомогательного приспособления. Байты 6 и 7 могут использоваться для указания предельной величины скорости вспомогательного приспособления.

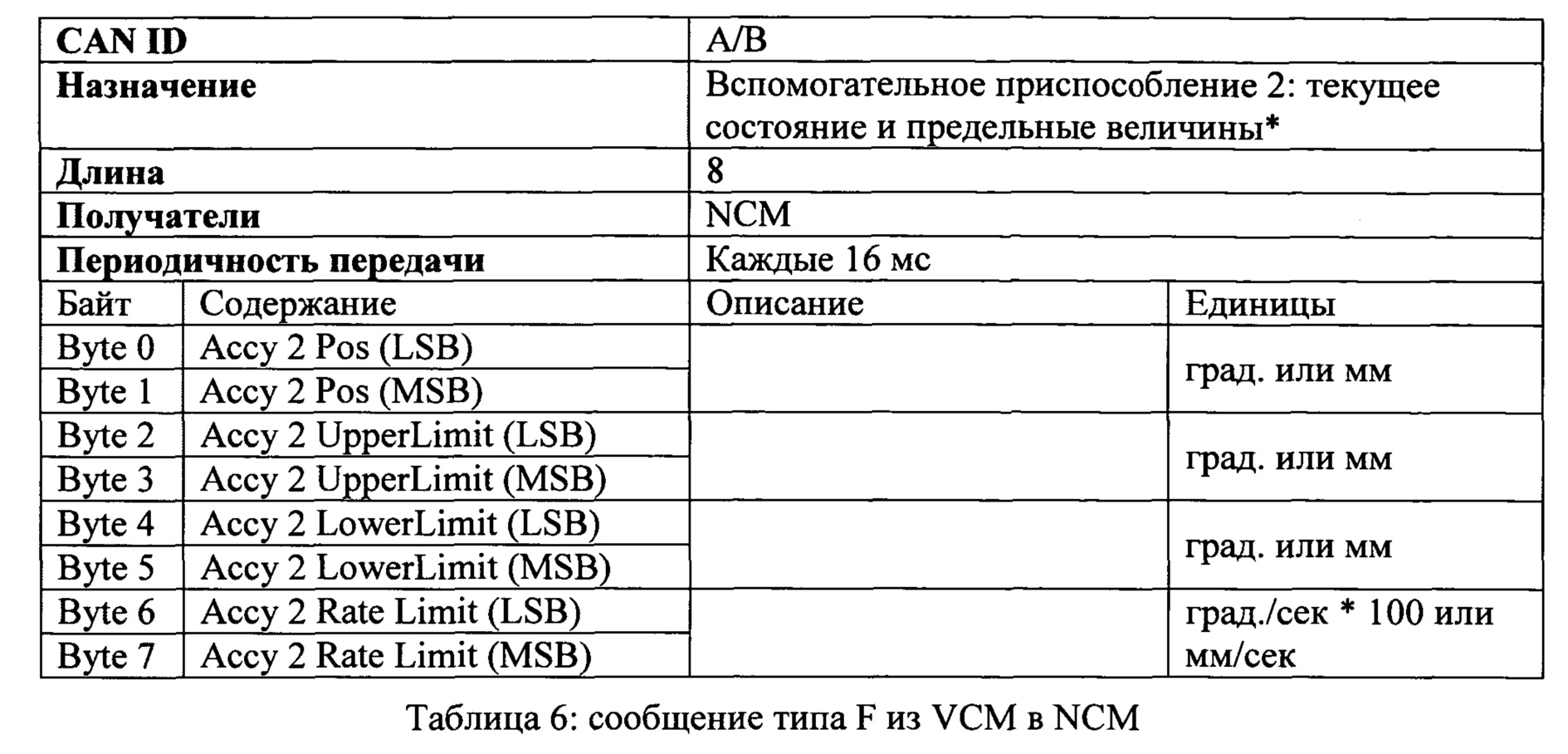
[0032] В Таблице 6 указаны данные, относящиеся к вспомогательному приспособлению транспортного средства, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу 116 средств управления навигацией. Данные, приведенные в Таблице 6, относятся ко второму вспомогательному приспособлению на транспортном средстве 106. Соответственно, байты 0 и 1 могут использоваться для указания текущего положения вспомогательного приспособления на транспортном средстве 106. Байты 2 и 3 могут использоваться для указания предельного верхнего положения вспомогательного приспособления. Байты 4 и 5 могут использоваться для указания предельного нижнего положения вспомогательного приспособления. Байты 6 и 7 могут использоваться для указания предельной величины скорости вспомогательного приспособления.
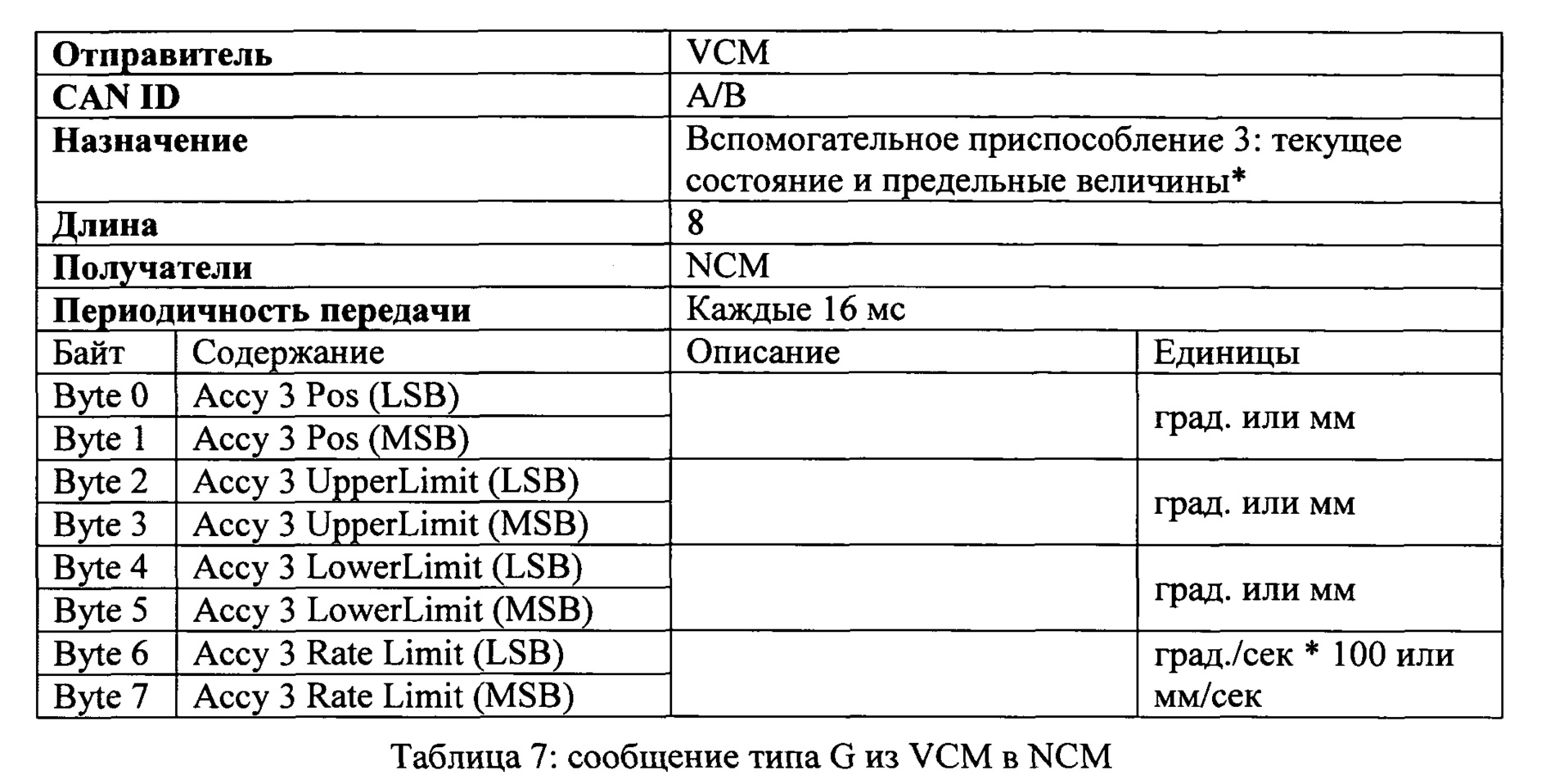
[0033] В Таблице 7 указаны дополнительные данные, относящиеся к вспомогательному приспособлению транспортного средства, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу 116 средств управления навигацией. В частности, байты 0 и 1 могут использоваться для указания текущего положения вспомогательного приспособления на транспортном средстве 106. Байты 2 и 3 могут использоваться для указания предельного верхнего положения вспомогательного приспособления. Байты 4 и 5 могут использоваться для указания предельного нижнего положения вспомогательного приспособления. Байты 6 и 7 могут использоваться для указания предельной величины скорости вспомогательного приспособления.
[0034]
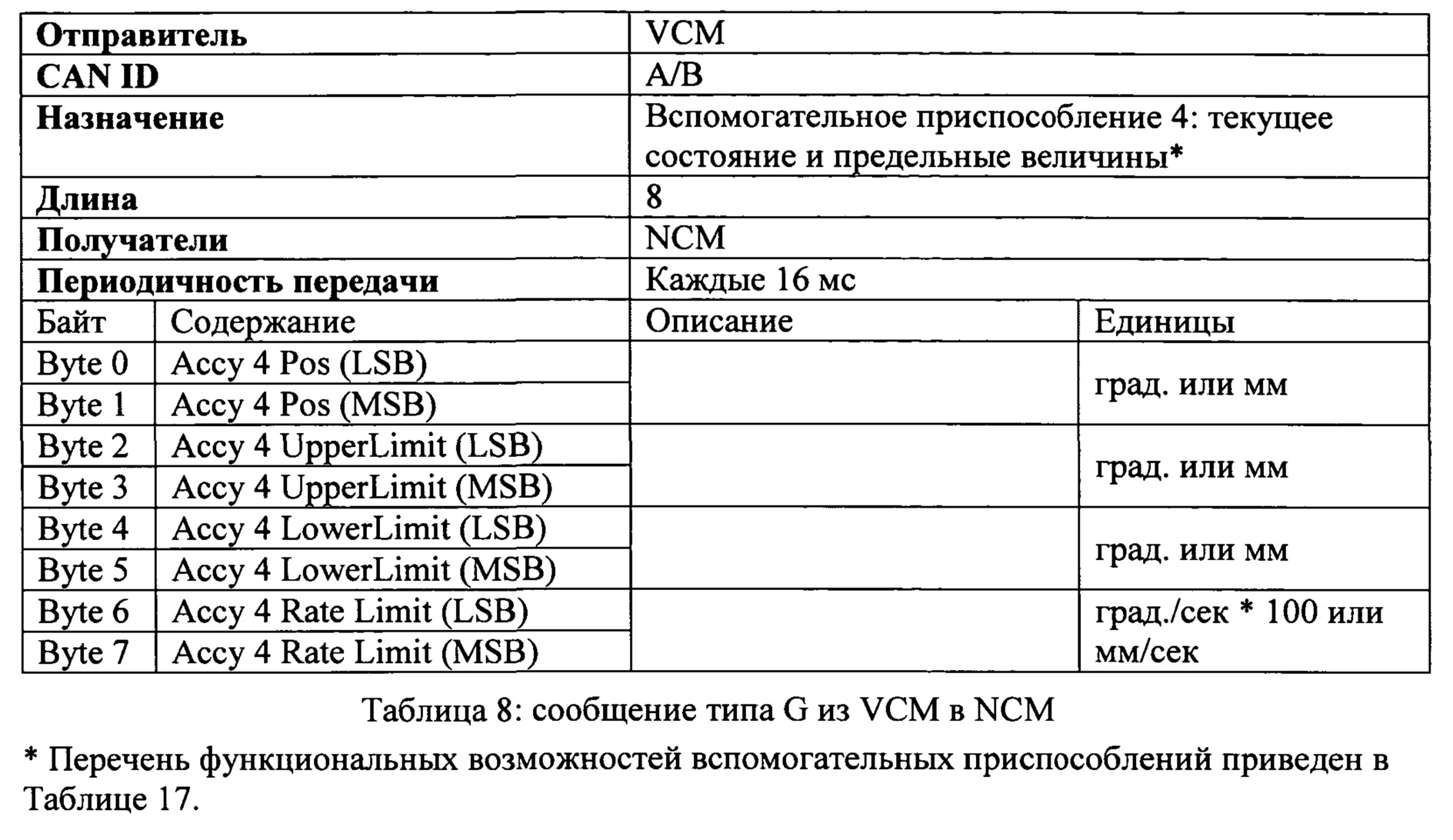
[0035] В Таблице 8 указаны дополнительные данные, относящиеся к вспомогательному приспособлению транспортного средства, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу 116 средств управления навигацией. В частности, байты 0 и 1 могут использоваться для указания текущего положения вспомогательного приспособления на транспортном средстве 106. Байты 2 и 3 могут использоваться для указания предельного верхнего положения вспомогательного приспособления. Байты 4 и 5 могут использоваться для указания предельного нижнего положения вспомогательного приспособления. Байты 6 и 7 могут использоваться для указания предельной величины скорости вспомогательного приспособления.
[0036] Аналогичные Таблицы 9-16 содержат данные, которые могут быть переданы из модуля NCM 114 в модуль VCM 112. В то время как сообщения, передаваемые из модуля NCM 114 в модуль VCM 112, которые описаны в Таблицах 1-8, могут использоваться для указания текущего состояния систем транспортного средства и/или предельных величин, сообщения, передаваемые из модуля NCM 114 в модуль VCM 112 (по меньшей мере в некоторых вариантах), которые описаны в Таблицах 9-16, включают команды управления транспортным средством в автоматическом режиме работы. В таких вариантах модуль NCM 114 может определять функциональные параметры управления, такие как ускорение, угол поворота, выдвижение вильчатого захвата и т.п. и передавать соответствующие команды в модуль VCM 112. Затем модуль VCM 112 может передать команду в соответствующий силовой компонент, такой как ТСМ 309, SCM 312 и т.п., который может передать сигнал мощности в двигатель для осуществления необходимой функции автоматического управления. Ниже приводятся Таблицы 9-16.
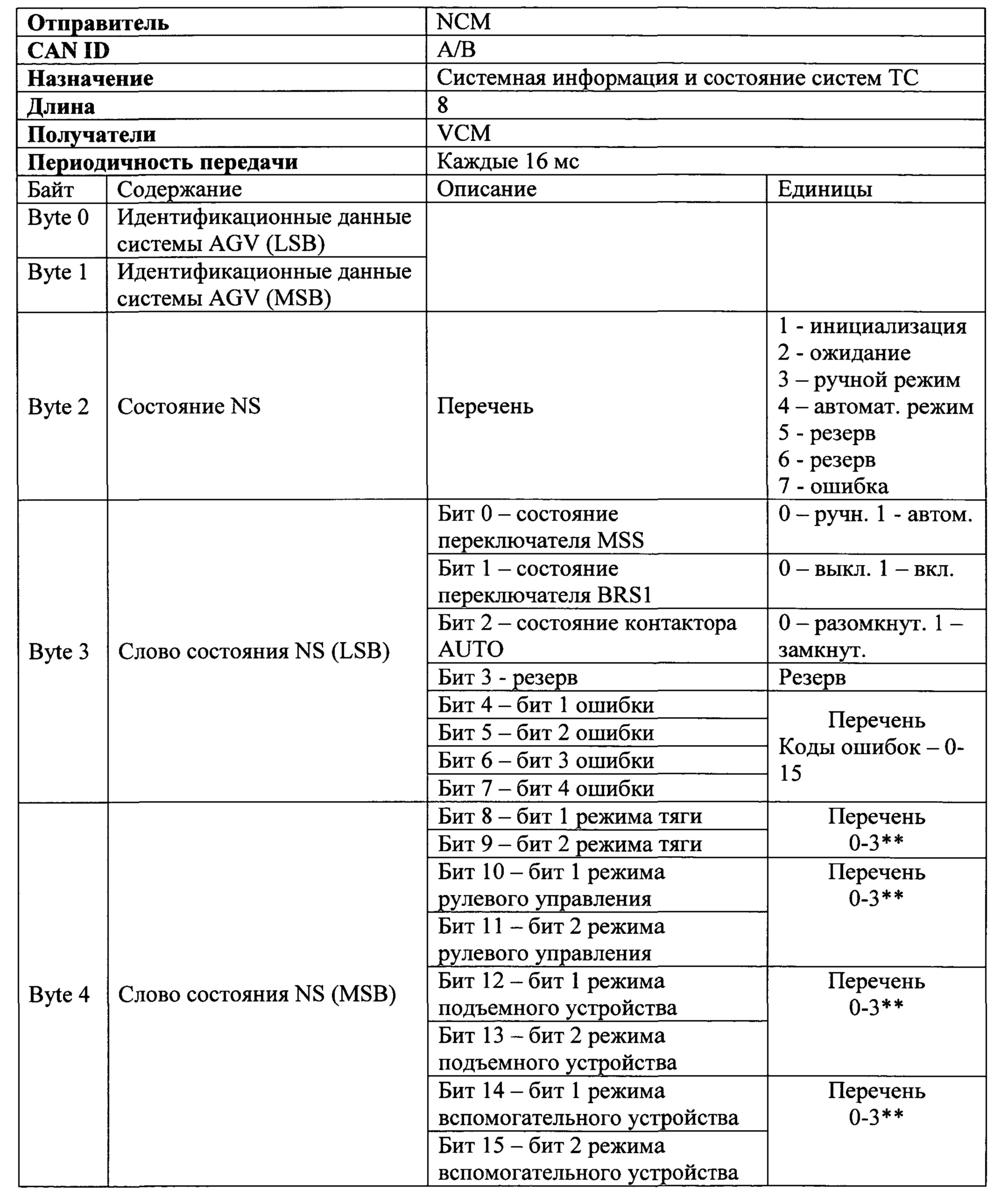
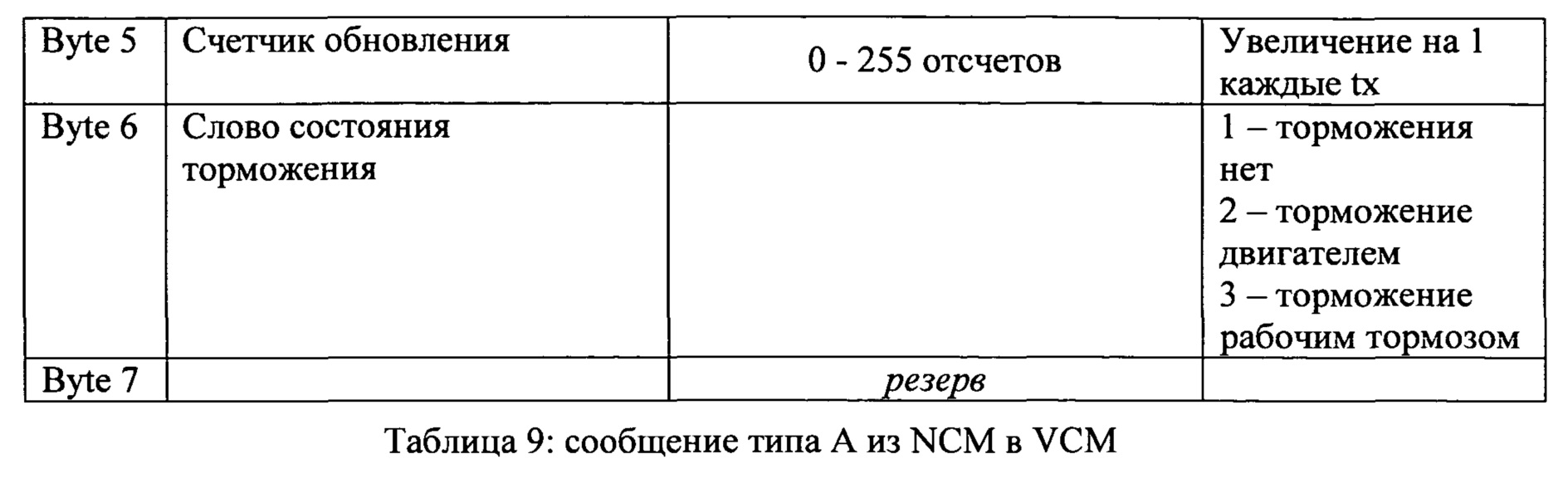
[0037] В Таблице 9 указаны системные данные, которые могут быть переданы из модуля NCM 114 в модуль VCM 112 по интерфейсу 116 средств управления навигацией. В частности, байты 0 и 1 используются для обеспечения информации идентификации системы. Байт 2 может использоваться для определения состояния навигационной системы, которое представляет собой состояние транспортного средства, как это интерпретируется навигационной системой 102. В частности, транспортное средство 106 может находиться в таких состояниях, как инициализация, ожидание, ручной режим, автоматический режим и т.п. Дополнительно, навигационная система 102 и/или модуль NCM 114 могут также сохранять текущее состояние транспортного средства 106. Таким образом, модуль NCM 114 может передавать состояние транспортного средства 106, как оно записано навигационной системой 102, в модуль VCM 112, так что данные можно сравнить, обновить и/или привести в соответствие. Аналогично, байты 3 и 4 могут использоваться для определения состояния систем навигационной системы. В частности, байты 3 и 4 могут использоваться для определения состояния переключателя MSS 302, переключателя BRS1 тормозной системы и/или состояния электромагнитного пускателя 318 автоматического режима управления (фигура 3). Байт 3 может использоваться для кодов ошибок. Байт 4 может использоваться для определения функционального режима для транспортного средства, такого как режим тяги, режим рулевого управления, режим подъемного устройства и режим вспомогательного приспособления. Байт 5 может использоваться для обеспечения счетчика обновления. Байт 6 может использоваться для указания текущего состояния тормозной системы транспортного средства 106.
[0038]
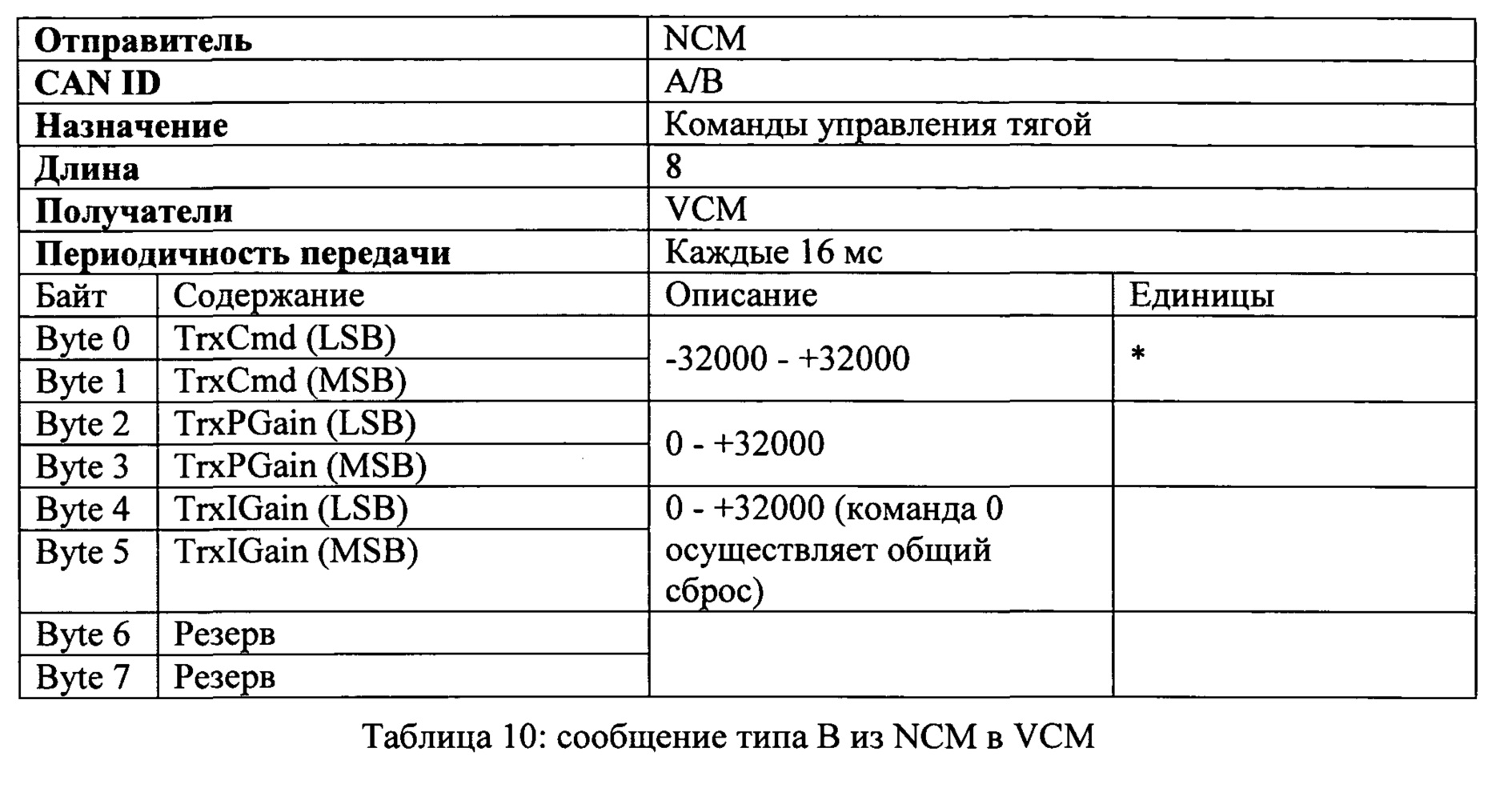
[0039] В Таблице 10 указаны команды, относящиеся к тяге, которые могут быть переданы из модуля NCM 114 в модуль VCM 112 по интерфейсу 116 средств управления навигацией. В частности, сообщения, приведенные в Таблице 10, предназначены для обеспечения команд, относящихся к тяге, в модуле VCM 112, когда транспортное средство 106 работает в автоматическом режиме. Соответственно, модуль NCM 114 может задавать команду, относящуюся к тяге, в байтах 0 и 1. Соответственно, модуль NCM 114 может пропорциональный коэффициент усиления (P-gain) для тяги в байтах 2 и 3. Соответственно, модуль NCM 114 может задавать интегральный коэффициент усиления (I-gain) для тяги в байтах 4 и 5.
[0040]
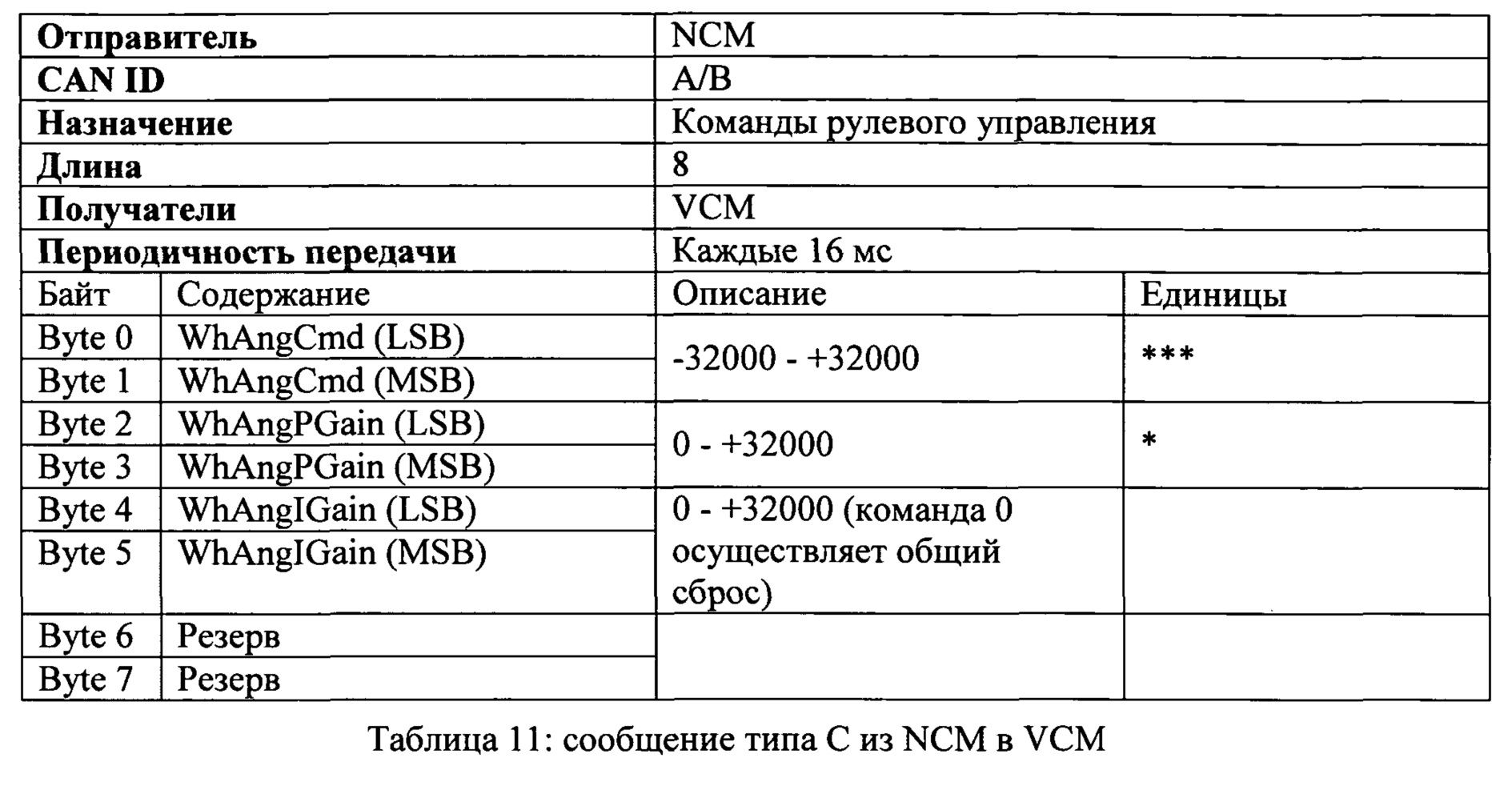
[0041] Аналогично Таблице 10 Таблица 11 определяет команды, которые могут быть переданы из модуля NCM 114 в модуль VCM 112 через интерфейс 116 средств управления навигацией, когда транспортное средство работает в автоматическом режиме. Назначением сообщения в Таблице 11 является обеспечение команд, относящихся к угловому положению колеса, в модуле VCM 112, когда транспортное средство 106 работает в автоматическом режиме. Соответственно, модуль NCM 114 может задавать команду, относящуюся к угловому положению колеса, в байтах 0 и 1. Соответственно, модуль NCM 114 может задавать пропорциональный коэффициент усиления для угла поворота колеса, в байтах 2 и 3. Соответственно, модуль NCM 114 может задавать интегральный коэффициент усиления для угла поворота колеса, в байтах 4 и 5.
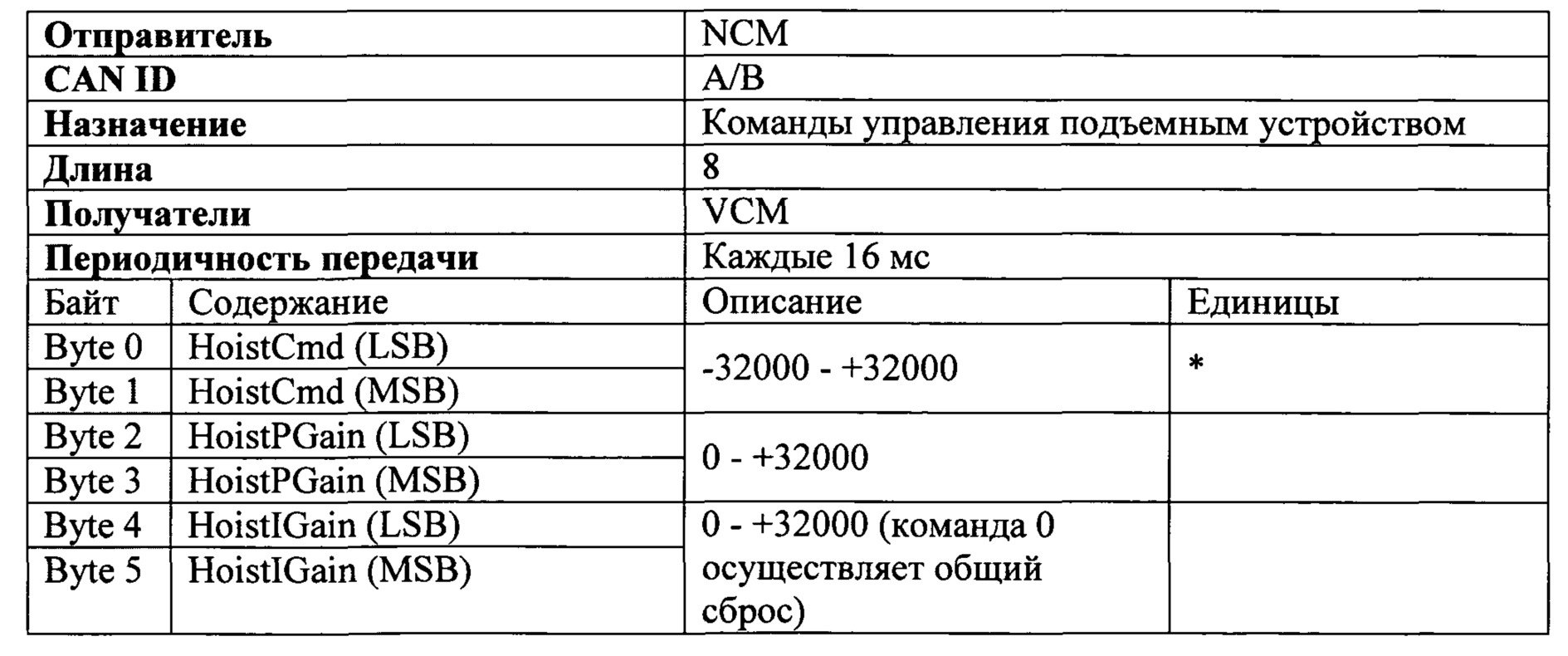

[0042] Таблица 12 определяет информацию команд, относящихся к подъемному устройству, которые могут быть переданы из модуля NCM 114 в модуль VCM 112 через интерфейс 116 средств управления навигацией, когда транспортное средство работает в автоматическом режиме. Сообщения, приведенные в Таблице 12, предназначены для обеспечения команд, относящихся к подъемному устройству, в модуле VCM 112, когда транспортное средство 106 работает в автоматическом режиме. Соответственно, модуль NCM 114 может задавать команды, относящиеся к подъемному устройству, в байтах 0 и 1. Модуль NCM 114 может задавать команды, относящиеся к пропорциональному коэффициенту усиления для подъемного устройства, в байтах 2 и 3. Модуль NCM 114 может задавать команды, относящиеся к интегральному коэффициенту усиления для подъемного устройства, в байтах 4 и 5.
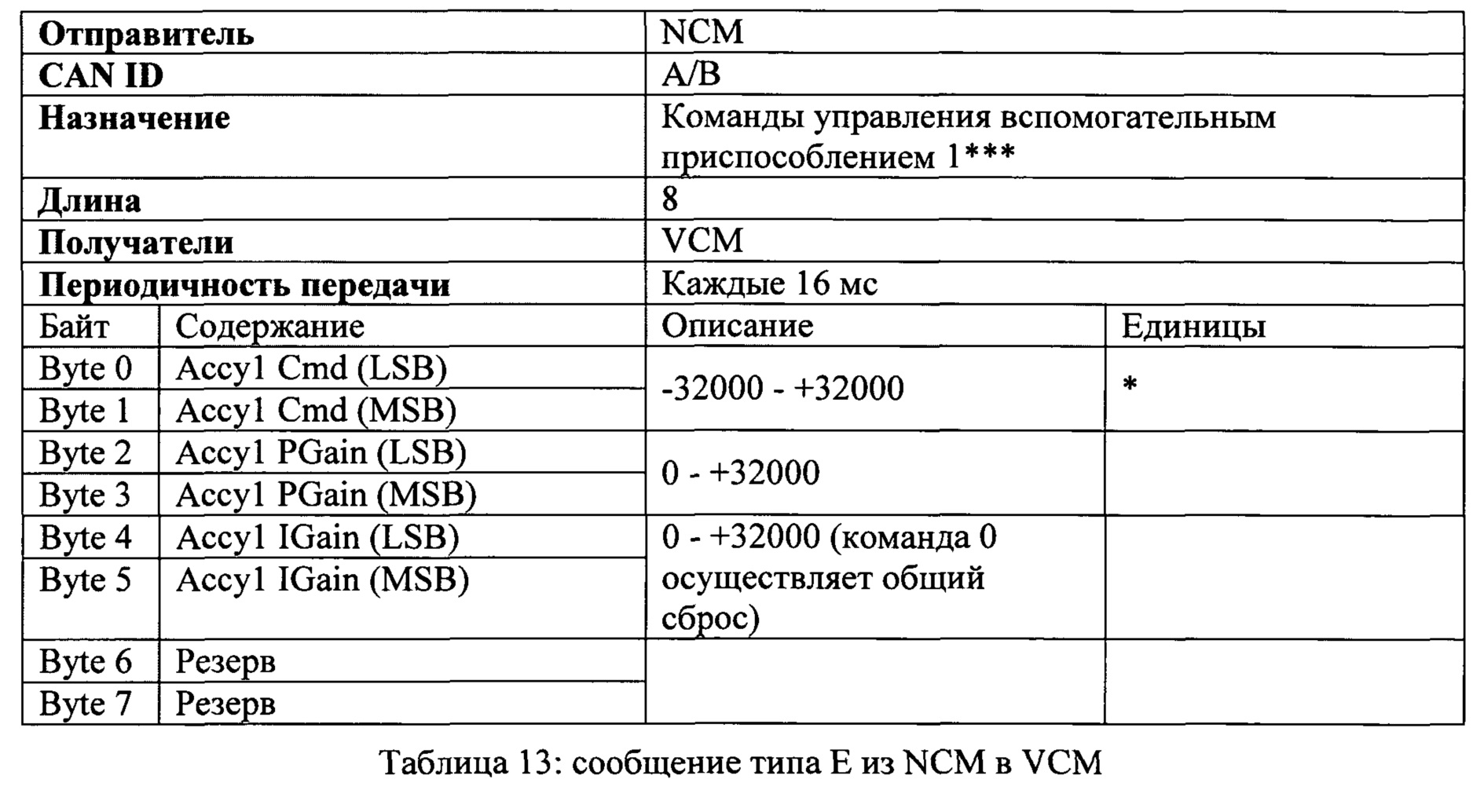
[0043] Как можно видеть, Таблица 13 определяет информацию команд, относящихся к вспомогательному приспособлению, которые могут быть переданы из модуля NCM 114 в модуль VCM 112 через интерфейс 116 средств управления навигацией, когда транспортное средство работает в автоматическом режиме. Сообщение в Таблице 13 предназначено для обеспечения команд, относящихся к вспомогательному приспособлению, в модуле VCM 112, когда транспортное средство 106 работает в автоматическом режиме. Соответственно, модуль NCM 114 может задавать команду, относящуюся к вспомогательному приспособлению, в байтах 0 и 1. Модуль NCM 114 может задавать команды, относящиеся к пропорциональному коэффициенту усиления для вспомогательного приспособления, в байтах 2 и 3. Модуль NCM 114 может задавать команды, относящиеся к интегральному коэффициенту усиления для вспомогательного приспособления, в байтах 4 и 5.
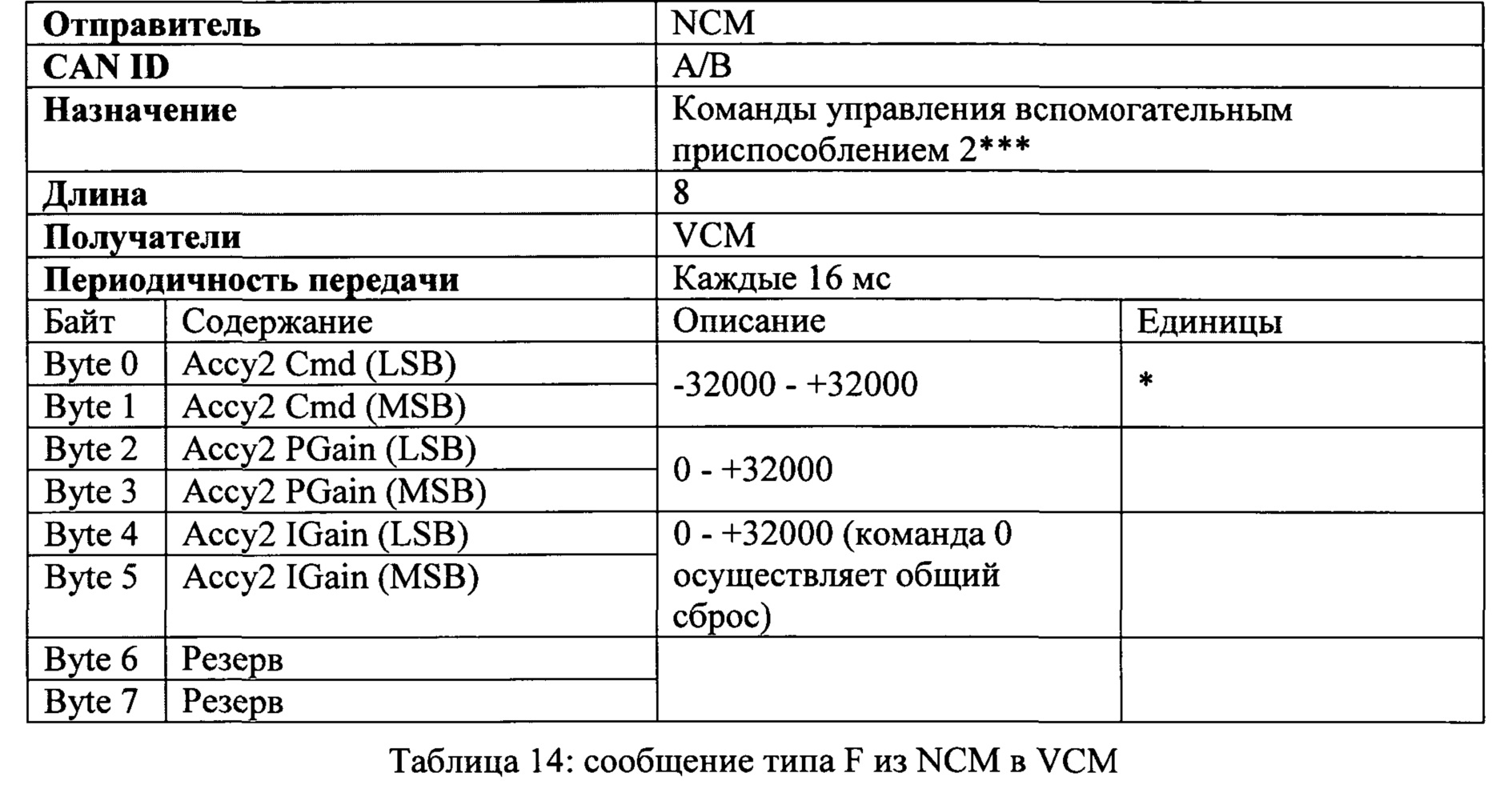
[0044] Как можно видеть, Таблица 14 определяет информацию команд, относящихся ко второму вспомогательному приспособлению на транспортном средстве 106, которые могут быть переданы из модуля NCM 114 в модуль VCM 112 через интерфейс 116 средств управления навигацией, когда транспортное средство работает в автоматическом режиме. Сообщение в Таблице 14 предназначено для обеспечения команд, относящихся к вспомогательному приспособлению, в модуле VCM 112, когда транспортное средство 106 работает в автоматическом режиме. Соответственно, модуль NCM 114 может задавать команду, относящуюся к вспомогательному приспособлению, в байтах 0 и 1. Модуль NCM 114 может задавать команды, относящиеся к пропорциональному коэффициенту усиления для вспомогательного приспособления, в байтах 2 и 3. Модуль NCM 114 может задавать команды, относящиеся к интегральному коэффициенту усиления для вспомогательного приспособления, в байтах 4 и 5.
[0045]
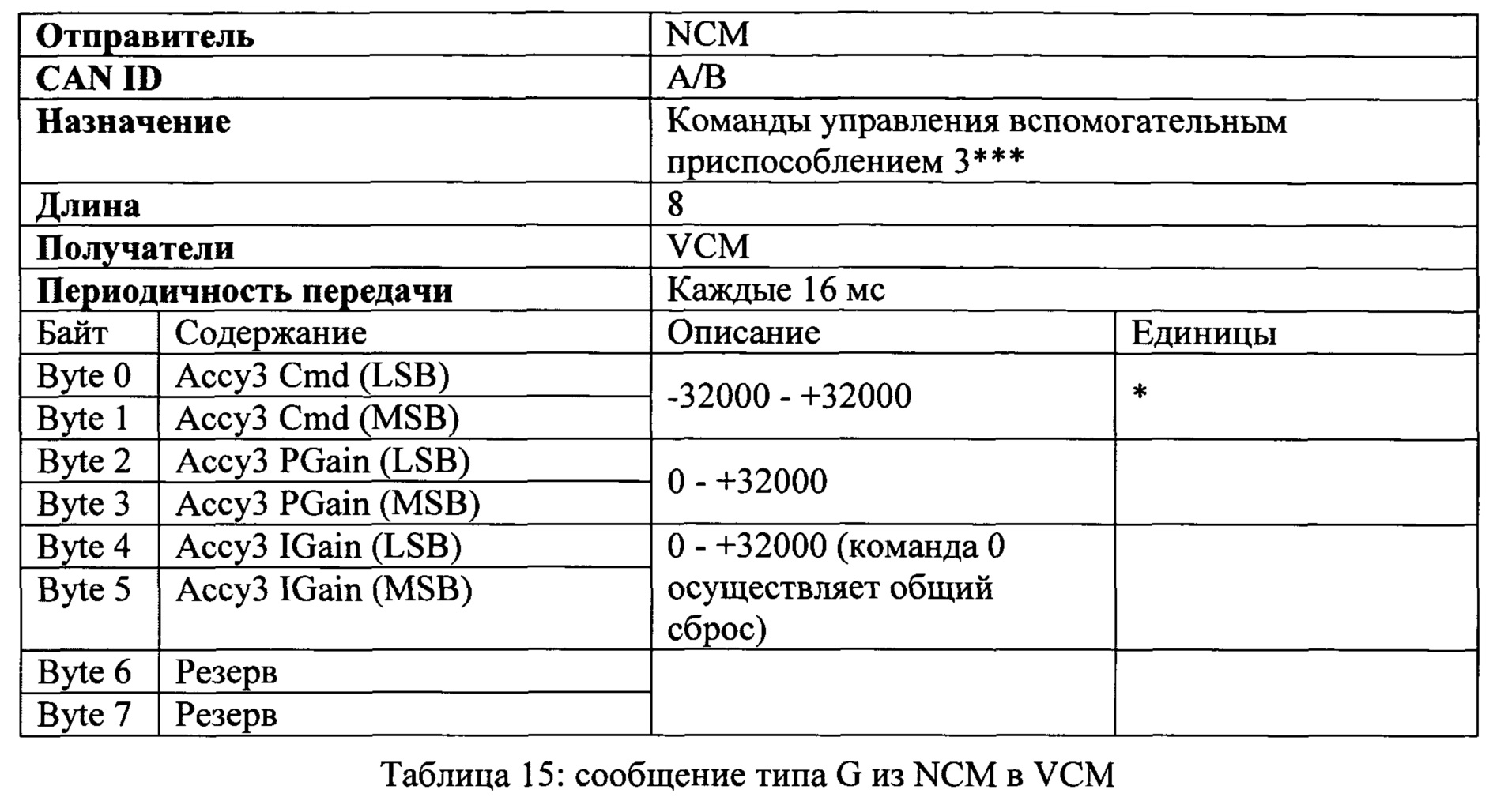
[0046] Как можно видеть, Таблица 15 определяет информацию команд, относящихся к третьему вспомогательному приспособлению на транспортном средстве 106, которые могут быть переданы из модуля NCM 114 в модуль VCM 112 через интерфейс 116 средств управления навигацией, когда транспортное средство работает в автоматическом режиме. Сообщение в Таблице 15 предназначено для обеспечения команд, относящихся к вспомогательному приспособлению, в модуле VCM 112, когда транспортное средство 106 работает в автоматическом режиме. Соответственно, модуль NCM 114 может задавать команду, относящуюся к вспомогательному приспособлению, в байтах 0 и 1. Модуль NCM 114 может задавать команды, относящиеся к пропорциональному коэффициенту усиления для вспомогательного приспособления, в байтах 2 и 3. Модуль NCM 114 может задавать команды, относящиеся к интегральному коэффициенту усиления для вспомогательного приспособления, в байтах 4 и 5.
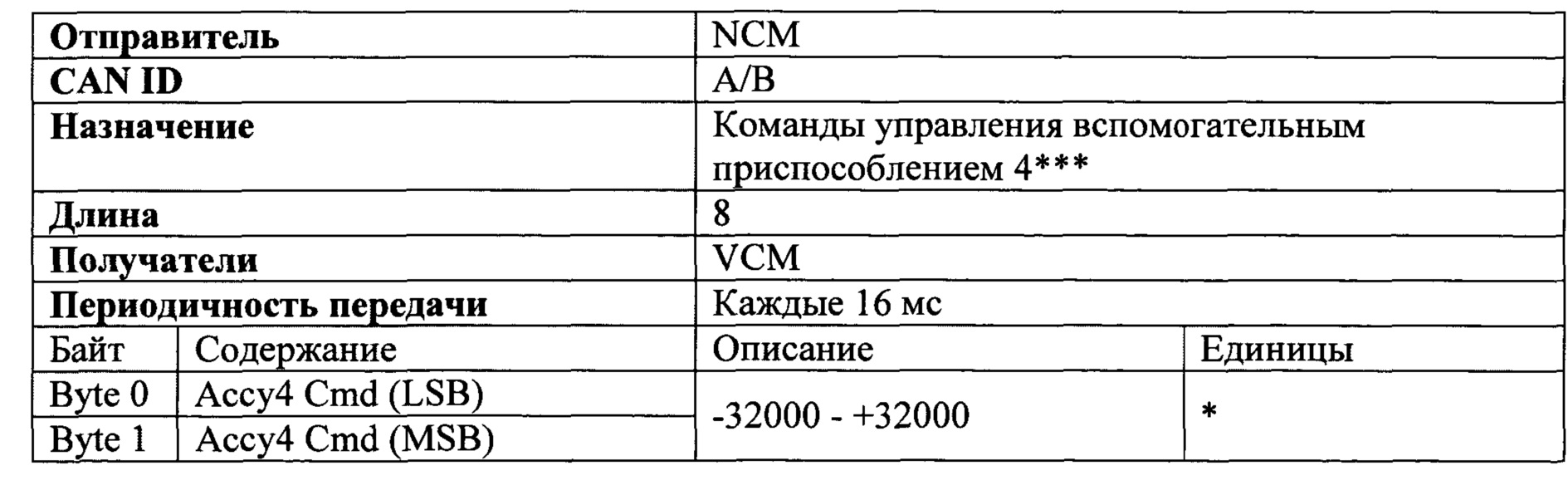
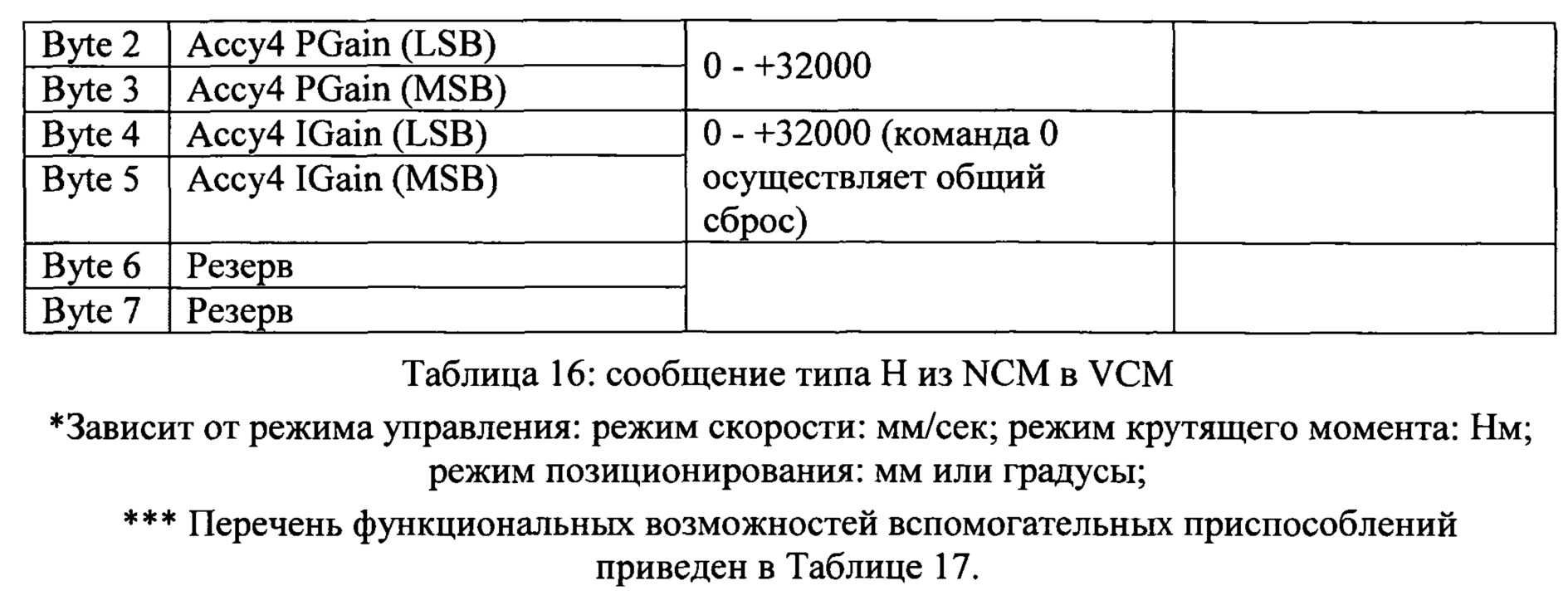
[0047] Как можно видеть, Таблица 16 определяет информацию команд, относящихся к четвертому вспомогательному приспособлению на транспортном средстве 106, которые могут быть переданы из модуля NCM 114 в модуль VCM 112 через интерфейс 116 средств управления навигацией, когда транспортное средство работает в автоматическом режиме. Сообщение в Таблице 16 предназначено для обеспечения команд, относящихся к вспомогательному приспособлению, в модуле VCM 112, когда транспортное средство 106 работает в автоматическом режиме. Соответственно, модуль NCM 114 может задавать команду, относящуюся к вспомогательному приспособлению, в байтах 0 и 1. Модуль NCM 114 может задавать команды, относящиеся к пропорциональному коэффициенту усиления для вспомогательного приспособления, в байтах 2 и 3. Модуль NCM 114 может задавать команды, относящиеся к интегральному коэффициенту усиления для вспомогательного приспособления, в байтах 4 и 5.


[0048] Как показано в Таблице 17, в зависимости от типа транспортного средства и, соответственно, от вспомогательных приспособлений на этом средстве функции могут изменяться. Например, если используется транспортное средство 106 первого типа, то функции вспомогательного приспособления могут быть: выдвижение, наклон и боковое смещение. Если используется транспортное средство 106 второго типа, то функции вспомогательного приспособления могут быть: перемещение, поворот, выдвижение/наклон/позиционирование и вспомогательный подъемник. Если используется транспортное средство 106 третьего типа, то функции вспомогательного приспособления могут быть: наклон, боковое смещение, захват и опрокидывание. Вспомогательные приспособления на транспортных средствах 106 четвертого типа могут включать и другие функции.
[0049] В настоящем описании были рассмотрены конкретные особенности и варианты осуществления изобретения, однако следует понимать, что возможны различные изменения и модификации этих вариантов без выхода за пределы объема заявленного изобретения. В настоящем описании были рассмотрены различные признаки заявленного изобретения, однако они необязательно должны использоваться все вместе. Поэтому все такие изменения и модификации, находящиеся в пределах объема заявленного изобретения, охватываются прилагаемой формулой.

Анти-cd79b антитела и иммуноконъюгаты и способы их применения
Система дистанционного управления транспортным средством для погрузочно-разгрузочных работ и способы управления ею
Тележка для погрузки-разгрузки материалов (варианты)
Способ и система использования отличительных ориентиров для определения местонахождения промышленных транспортных средств в начале работы
Способ и устройство, позволяющее использовать объекты с предварительно установленными координатами для определения местоположения промышленных транспортных средств
Система навигации вильчатых погрузчиков
Антитела к fcrh5, их иммуноконъюгаты и способы их применения
Антитела к fcrh5, их иммуноконъюгаты и способы их применения
Многорежимное навигационное управление движением транспортного средства
Промышленные транспортные средства, местоположение которых определяется по плафонам верхнего освещения
Анти-cd79b антитела и иммуноконъюгаты и способы их применения
Система дистанционного управления транспортным средством для погрузочно-разгрузочных работ и способы управления ею
Тележка для погрузки-разгрузки материалов (варианты)
Способ и система использования отличительных ориентиров для определения местонахождения промышленных транспортных средств в начале работы
Способ и устройство, позволяющее использовать объекты с предварительно установленными координатами для определения местоположения промышленных транспортных средств
Система навигации вильчатых погрузчиков
Антитела к fcrh5, их иммуноконъюгаты и способы их применения
Антитела к fcrh5, их иммуноконъюгаты и способы их применения
Многорежимное навигационное управление движением транспортного средства
Промышленные транспортные средства, местоположение которых определяется по плафонам верхнего освещения

