Результат интеллектуальной деятельности: УЛУЧШЕННЫЙ СПОСОБ И СИСТЕМА ОБРАБОТКИ ИНФОРМАЦИИ КАРТ ДЛЯ НАВИГАЦИИ ПРОМЫШЛЕННЫХ ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Варианты осуществления настоящего изобретения в целом относятся к системам навигации в физической среде промышленных транспортных средств и, более конкретно, к улучшенным способам и системам для обработки информации карт для навигации промышленных транспортных средств.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Различные организации осуществляют на регулярной основе работу различных предприятий для решения задач, связанных с поставками и/или с запросами на поставку. Например, малые и большие компании, государственные организации и/или другие организационные единицы используют различные системы управления запасами и перемещениями этих запасов (например, сырьевые материалы, товары, машины и т.п.) в различных физических средах (например, на складах, в холодильных помещениях, на заводах и фабриках, в магазинах и т.п.). Транснациональные компании могут создавать склады в одной стране для хранения сырья, из которого производятся товары, перемещаемые для хранения на складе в другой стране для распространения на местных рынках. Склады должны быть хорошо организованы, чтобы поддерживать и/или улучшать производство и продажи. Если не обеспечивается оптимальная доставка сырья на завод, то производится меньше товаров. Таким образом, будут недополучены доходы за непроизведенные товары, в результате чего не будут компенсированы расходы на сырье.
К сожалению, физическая среда, такая как, например, складские помещения, накладывает различные ограничения, которые затрудняют своевременное выполнение различных задач. Складские помещения и другие совместно используемые площади должны быть безопасными для персонала. Некоторые работники управляют мощным оборудованием и промышленными транспортными средствами, такими как, вильчатые погрузчики, которые могут нанести людям тяжелые повреждения, в том числе и со смертельным исходом. Тем не менее, участие рабочих необходимо для управления промышленными транспортными средствами для выполнения различных производственных задач, таких как перемещение поддонов с товарами с одних мест на другие места в складских помещениях. В большинстве складов используется большое количество вильчатых погрузчиков, управляемых водителями, для перемещения различных грузов. Для повышения производительности на этих складах просто увеличивают количество таких погрузчиков, и, соответственно, увеличивается число водителей.
На некоторых складах используют оборудование автоматизации выполнения этих задач. На этих складах могут использоваться автоматические промышленные транспортные средства, такие как вильчатые погрузчики, для перемещения грузов по определенным маршрутам для складирования этих грузов в назначенных местах. При осуществлении навигации промышленного транспортного средства необходимо эффективно и быстро обрабатывать информацию карт для формирования таких маршрутов. Если такое транспортное средство должно сравнивать информацию измерений датчиков с информацией деталей, связанной с каждым ориентиром, для определения местонахождения транспортного средства, то время вычислений будет большим, и транспортное средство будет двигаться медленно и неэффективно. Недостаток подхода, известного как расширенный фильтр Калмана, заключается в том, что динамически добавляемые ориентиры существенно увеличивают затраты вычислительных ресурсов для определения местонахождения, а также формирования карты. Для обеспечения точной информации местонахождения в режиме реального времени минимизируют количество динамических ориентиров, обрабатываемых фильтром Калмана в любой момент времени.
С учетом вышеизложенного существует потребность в улучшенном способе и системе обработки информации карты для навигации промышленных транспортных средств путем уменьшения количества деталей, которые должны обрабатываться и/или храниться, для определения местонахождения транспортного средства.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В различных вариантах осуществления настоящего изобретения раскрывается улучшенный способ и улучшенная система обработки информации карты для навигации промышленных транспортных средств. В одном из вариантов способ разбиения информации карты для навигации промышленных транспортных средств включает разбиение информации карты, связанной с физической средой, на множество сегментов карты, нахождение сегмента, который соответствует текущему местонахождению транспортного средства, и навигацию промышленного транспортного средства с использованием найденного сегмента карты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для того чтобы можно было лучше понять вышеуказанные особенности настоящего изобретения, кратко охарактеризованного в предыдущем разделе, ниже приводится подробное описание изобретения на примерах некоторых вариантов, которые иллюстрируются на прилагаемых чертежах. Однако следует отметить, что прилагаемые чертежи иллюстрируют только типичные варианты осуществления изобретения и поэтому не должны рассматриваться как ограничения его объема, поскольку возможны и другие, в равной степени эффективные, варианты.
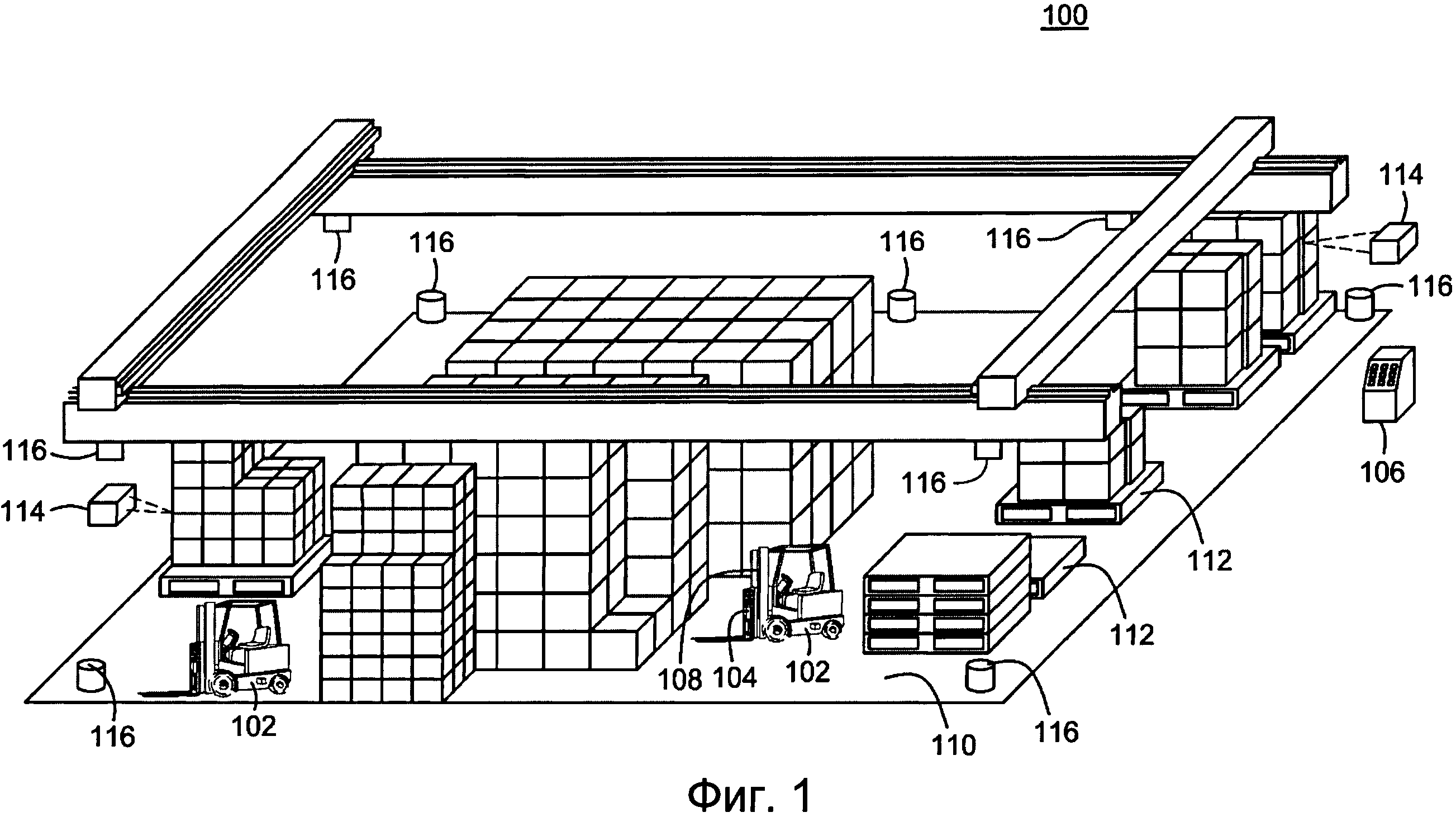
Фигура 1 - схематический вид в перспективе физической среды, в которой могут быть реализованы различные варианты осуществления настоящего изобретения.
Фигура 2 - схематический вид в перспективе вильчатого погрузчика, предназначенного для навигации в физической среде для выполнения различных задач по одному или нескольким вариантам.
Фигура 3 - структурная блок-схема системы, обеспечивающей определение точного местонахождения промышленного транспортного средства по одному или нескольким вариантам.
Фигура 4 - функциональная блок-схема системы, обеспечивающей определение точного местонахождения промышленного транспортного средства по одному или нескольким вариантам.
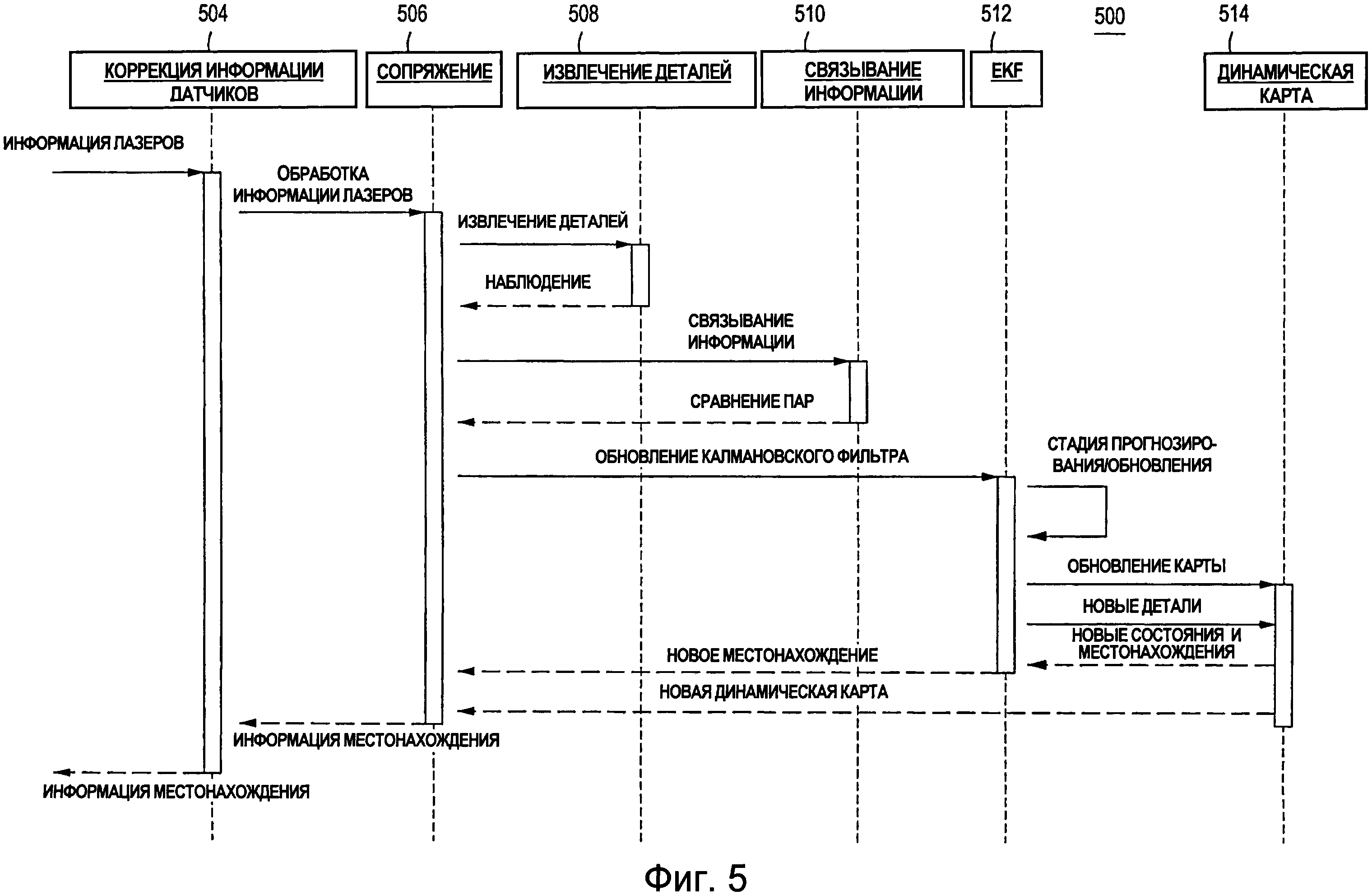
Фигура 5 - схема взаимодействия, иллюстрирующая процесс определения местонахождения, а также формирования карты для промышленного транспортного средства по одному или нескольким вариантам.
Фигура 6 - схематическая иллюстрация карты для расчета положения промышленного транспортного средства по одному или нескольким вариантам.
Фигура 7 - функциональная блок-схема, иллюстрирующая процесс определения местонахождения, а также формирования карты для навигации промышленного транспортного средства по одному или нескольким вариантам.
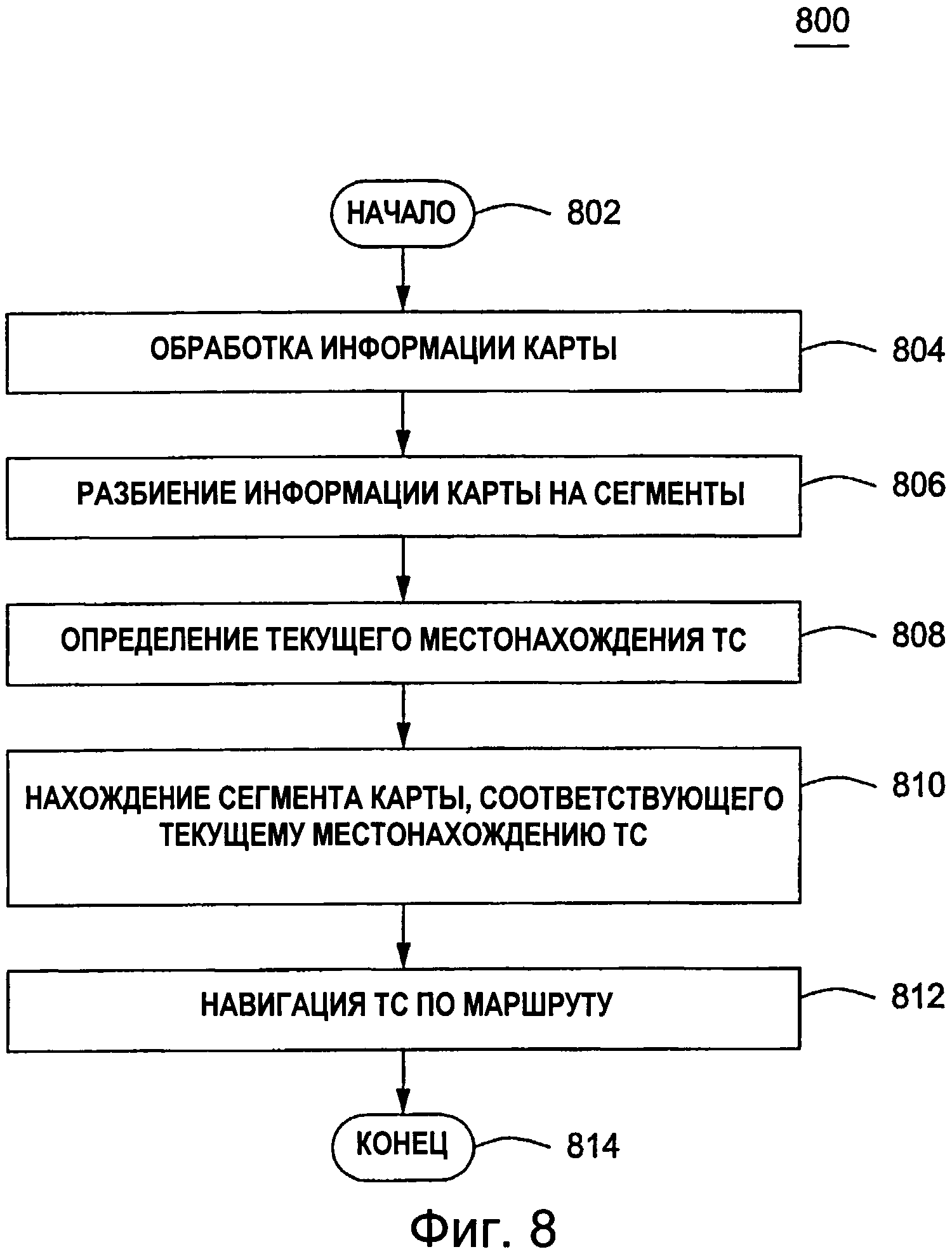
Фигура 8 - блок-схема способа разбиения информации карты на отдельные сегменты по одному или нескольким вариантам.
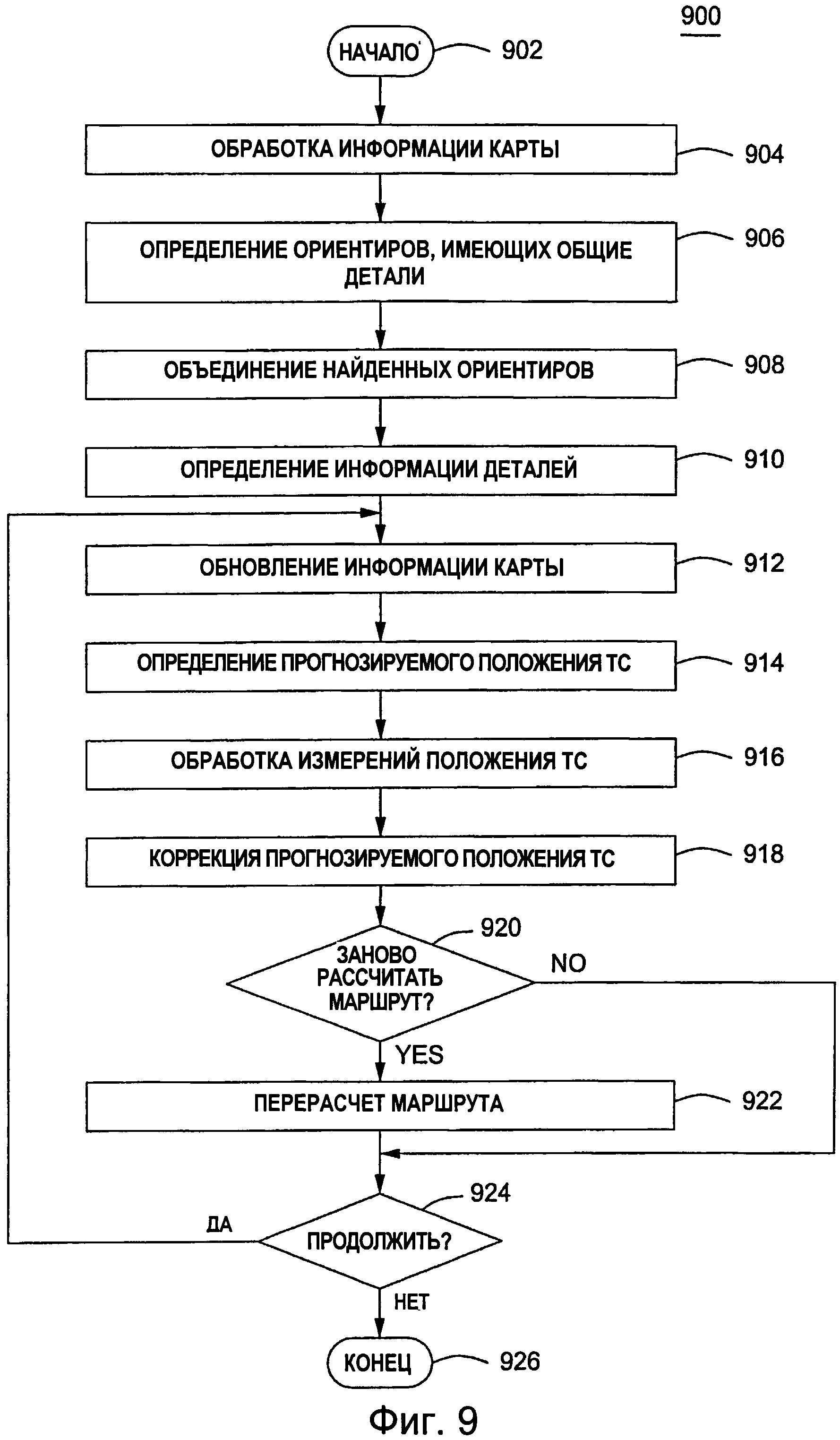
Фигура 9 - блок-схема улучшенного способа обработки информации карты по одному или нескольким вариантам.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фигуре 1 представлен схематический вид в перспективе физической среды 100, в которой могут быть реализованы различные варианты настоящего изобретения.
В некоторых вариантах физическая среда 100 содержит транспортное средство 102, соединенное с мобильным компьютером 104, центральный компьютер 106, а также группу 108 датчиков. Группа 108 датчиков содержит множество устройств для анализа различных объектов в физической среде 100 и передачи данных (например, изображений, видеоданных, картографической информации, трехмерной графической информации и т.п.) в мобильный компьютер 104 и/или в центральный компьютер 106, как это будет описано подробно ниже. Группа 108 датчиков включает различные датчики, такие как, например, кодовые датчики положения, ультразвуковые дальномеры, лазерные дальномеры, датчики давления и т.п.
Физическая среда 100 содержит также пол 110, на котором установлено множество объектов. Эти объекты включают множество поддонов 112, множество единиц 114 хранения и/или другие объекты, указанные ниже. Физическая среда 100 также содержит различные препятствия (не показаны), мешающие нормальной работе транспортного средства 102. Некоторые объекты могут представлять собой препятствия для транспортных средств при их движении по различным маршрутам (например, по заранее рассчитанным или динамическим изменяющимся маршрутам), если такие объекты нарушают выполнение задачи. Например, препятствием может быть поломанный поддон в месте назначения для транспортируемого груза. Физическая среда 100 также содержит множество маркеров 116. Множество маркеров 116 показаны на фигуре 1 как объекты, прикрепленные к потолку. В некоторых вариантах маркеры 116 могут быть установлены на полу или на полу и на потолке. В некоторых вариантах маркеры 116 представляют собой маячки, которые обеспечивают навигацию в физической среде, как это описано ниже. Множество маркеров 116, а также другие объекты, находящиеся в физической среде 100, являются ориентирами, формируемыми деталями окружающей обстановки. Мобильный компьютер 104 извлекает информацию по этим деталям и определяет точное текущее положение транспортного средства.
Физическая среда 100 может быть складом или холодильным помещением для складирования множества единиц 114 хранения, подготавливаемых для транспортировки. На складе могут быть погрузочно-разгрузочные площадки для погрузки и разгрузки множества единиц хранения, транспортируемых коммерческими транспортными средствами, по железной дороге, по воздуху и/или по воде. Единицы 114 хранения обычно представляют собой различные товары, продукты и/или сырьевые материалы, и т.п. Например, множество единиц 114 хранения могут быть потребительскими товарами, размещенными на стандартных ISO-поддонах, установленных вильчатыми погрузчиками на стеллажи, для последующей доставки в розничные магазины. Транспортное средство 102 участвует в обеспечении такой доставки путем перемещения потребительских товаров в указанные места, из которых их могут забрать коммерческие транспортные средства (например, грузовые автомобили) для последующей доставки этих товаров в один или несколько пунктов назначения.
В соответствии с одним или несколькими вариантами осуществления изобретения транспортное средство 102 может быть транспортным средством с автоматическим управлением, таким как автоматический вильчатый погрузчик, который приспособлен для обработки и/или перемещения множества единиц 114 хранения по полу 110. Транспортное средство 102 использует один или несколько подъемных органов, таких как вилочный захват, для подъема одной или нескольких единиц 114 хранения с последующей их транспортировкой по некоторому маршруту в транзитной зоне 120 (например, в коридоре) для размещения в зоне 122 погрузки-разгрузки. В других вариантах одна или несколько единиц 114 хранения могут быть размещены на поддоне 112, который поднимается транспортным средством 102 и перемещается в заданное место.
Каждый из множества поддонов 112 представляет собой плоскую транспортную конструкцию для удерживания товаров в устойчивом положении при подъеме транспортным средством 102 и/или другим подъемным устройством (например, устройством для подъема поддонов и/или фронтальным погрузчиком). Поддон 112 является несущим основанием для грузов, обеспечивающим их эффективную перевалку и хранение. Различные поддоны 112 могут использоваться в системе стеллажей (не показаны). В некоторых системах стеллажей используются роликовые или гравитационные транспортеры для подачи вперед одной или нескольких единиц 114 хранения на одном или нескольких поддонах 112. Один или несколько поддонов 112 подаются вперед, пока они не будут остановлены замедляющим устройством, физическим ограничителем или другим поддоном 112.
В некоторых вариантах мобильный компьютер 104 и центральный компьютер 106 - это вычислительные устройства, управляющие транспортным средством 102 для выполнения различных задач в физической среде 100. Мобильный компьютер 104 приспособлен для соединения с транспортным средством 102. Мобильный компьютер 104 может также принимать и объединять данные (например, информацию лазерного сканера, информацию изображений и/или другие данные от различных датчиков). Различные программные модули в мобильном компьютере 104 управляют работой компонентов оборудования, связанного с транспортным средством 102, как это будет описано ниже.
Физическая среда 100 может быть охарактеризована как динамически изменяющаяся зона совместного использования, в которой поддоны должны устанавливаться на полу 110 в известных местах. Мобильный компьютер 104 и/или центральный компьютер 106 осуществляют динамическое формирование карты физической среды 100 в режиме реального времени для поддержания актуальной глобальной (полной) карты физической среды. В некоторых вариантах центральный компьютер 106 разбивает полную карту на небольшие сегменты и отправляет их транспортным средствам. В этом случае в мобильном компьютере 104 используется уменьшенный массив информации по ориентирам, которая должна обрабатываться в любой момент времени, например, обрабатываются только те ориентиры, которые находятся в сегменте карты, в котором работает промышленное транспортное средство 102, и/или видны ему из его текущего местонахождения. В других вариантах полная карта записывается мобильным компьютером 104, который использует из нее для навигации транспортного средства только один сегмент, в котором оно находится. Как только промышленное транспортное средство 102 входит в другой сегмент, центральный компьютер 106 передает ему карту этого сегмента, или же мобильный компьютер 104 извлекает этот сегмент из записанной в нем полной карты. Мобильный компьютер 104 может также обновлять соответствующий сегмент карты информацией о деталях окружающей обстановки, которая передается ему по меньшей мере одним другим промышленным транспортным средством.
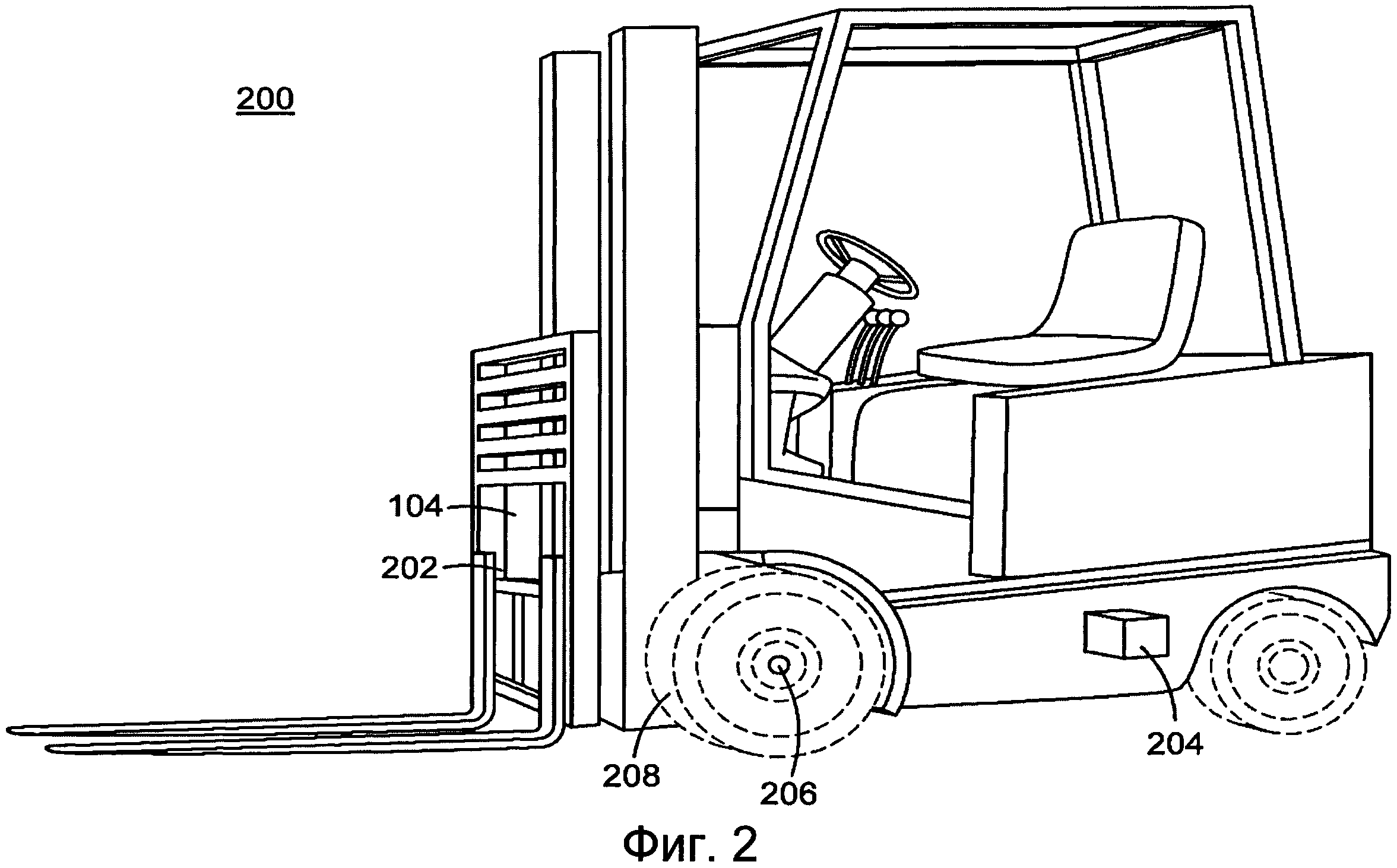
На фигуре 2 представлен схематический вид в перспективе вильчатого погрузчика 200, который может использоваться для автоматизации выполнения различных задач в физической среде по одному или нескольким вариантам осуществления настоящего изобретения.
Вильчатый погрузчик 200 (то есть автопогрузчик с вертикальной рамой, автоштабелер, погрузчик с боковым выдвижным грузоподъемником или вильчатый подъемник) представляет собой промышленный электрокар, который может иметь разную грузоподъемность и используется для подъема и транспортировки различных объектов. В некоторых вариантах вильчатый погрузчик 200 приспособлен для перемещения одного или нескольких поддонов (например, поддонов 112 на фигуре 1) с единицами хранения (например, единицами 114 хранения, указанными на фигуре 1) по маршрутам в физической среде (например, в физической среде 100 фигуры 1). Маршруты могут быть рассчитаны заранее или рассчитываются динамически при получении задач. Вильчатый погрузчик 200 может въезжать в зону хранения, в которой размещено множество поддонов, для размещения или извлечения поддона. Вильчатый погрузчик 200 многократно въезжает в зону хранения и помещает поддон на консольные рычаги или на направляющие балки. Таким образом, размеры вильчатого погрузчика 200, включая общую ширину и ширину грузоподъемника, должны быть точно известны при определении ориентации, связанной с объектом и/или с местом назначения.
Вильчатый погрузчик 200 имеет вилы с двумя или несколькими зубцами для подъема и перемещения единиц хранения в физической среде. Вместо двух или нескольких зубцов вильчатый погрузчик 200 может иметь одну или несколько металлических стоек (не показаны) для подъема специфических грузов (например, рулонов ковров, катушек проволоки и/или т.п.). В одном из вариантов вильчатый погрузчик 200 имеет гидравлические телескопические вилы, которые обеспечивают возможность размещения двух или более поддонов друг за другом, без проходов между этими поддонами.
Вильчатый погрузчик 200 по одному или нескольким вариантам может также включать различные исполнительные механизмы с механическим, гидравлическим и/или электрическим приводом. В некоторых вариантах вильчатый погрузчик 200 снабжен одним или несколькими гидравлическими механизмами, которые обеспечивают боковое и/или вращательное движение двух или более зубцов вил. В одном из вариантов вильчатый погрузчик 200 содержит гидравлический исполнительный механизм для сближения и раздвижения зубцов вил. В другом варианте вильчатый погрузчик 200 содержит механический или гидравлический компонент для сжатия транспортируемых грузов (например, бочки, кеги, рулоны бумаги и/или т.п.).
Вильчатый погрузчик 200 может быть соединен с мобильным компьютером 104, который содержит программные модули для управления работой вильчатого погрузчика 200 в соответствии с одной или несколькими задачами. Вильчатый погрузчик 200 также соединен с различными датчиками (например, с группой 108 датчиков фигуры 1), которые передают информацию измерений (например, информацию изображений, видеоинформацию, информацию о дальности в горизонтальной плоскости и/или трехмерные графические данные) в мобильный компьютер 104 для извлечения информации, связанной с деталями окружающей обстановки. Эти датчики могут быть установлены на вильчатом погрузчике 200 в любом месте внутри или снаружи погрузчика или же могут быть установлены в известных местах физической среды 100. Типовые варианты вильчатого погрузчика 200 обычно содержат камеру 202, двухмерный лазерный сканер 204, установленный на каждой стороне погрузчика, и/или кодовый датчик 206 положения, прикрепленный к каждому колесу 208. В других вариантах вильчатый погрузчик 200 содержит только двухмерный лазерный сканер 204 и кодовый датчик 206 положения. Вильчатый погрузчик 200 может использовать любую группу датчиков с зоной обзора, охватывающей текущее направление движения (например, движения вперед/назад, движения вил вверх/вниз, выдвижения/втягивания вил, и/или т.п.). Кодовые датчики положения обеспечивают информацию, относящуюся к движению транспортного средства. Датчики, установленные снаружи погрузчика, могут включать лазерные сканеры или камеры, размещенные таким образом, чтобы можно было получить как можно больше информации, помогающей осуществлять операции погрузчика в автоматическом режиме. Внешние датчики могут включать ограниченное количество приемопередатчиков и/или других активных или пассивных средств, с помощью которых автоматизированное транспортное средство может получать информацию для определения своего местонахождения.
В некоторых вариантах количество датчиков (например, лазерных сканеров, лазерных дальномеров, кодовых датчиков положения, датчиков давления и/или т.п.), а также их положение на вильчатом погрузчике 200 зависят от транспортного средства, и местонахождение этих датчиков на погрузчике влияет на обработку информации измерений. Например, если все лазерные сканеры размещены в местах, в которых они могут получать полезную информацию, группа 108 датчиков может обрабатывать эту информацию и приводить ее к центральной точке для вильчатого погрузчика 200. Кроме того, группа 108 датчиков может объединять информацию сканирования, получаемую от нескольких лазеров, в информацию сканирования одного виртуального лазера, которая может использоваться различными программными модулями для управления вильчатым погрузчиком 200.
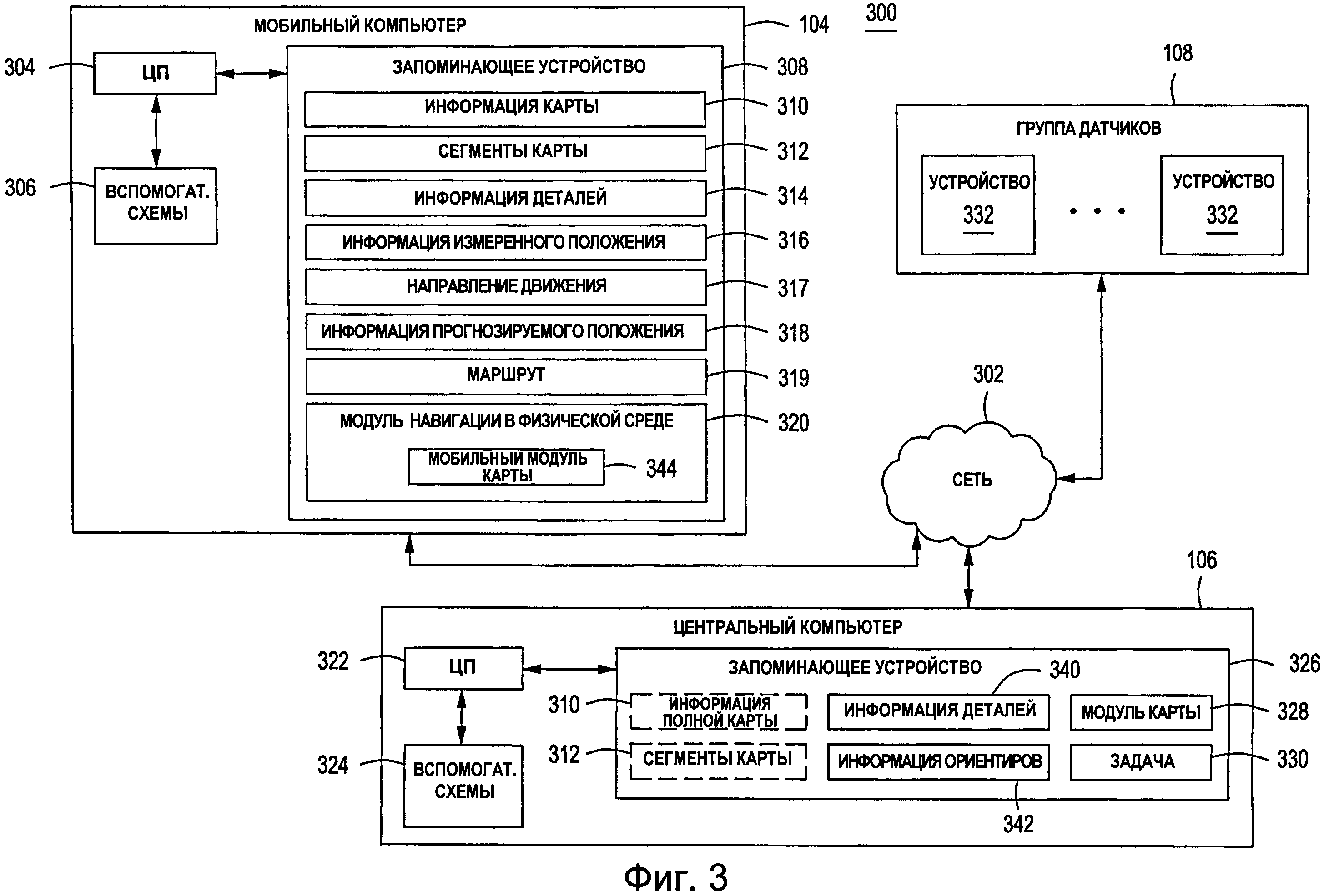
На фигуре 3 приведена структурная блок-схема системы 300 обеспечения определения точного местонахождения промышленного транспортного средства по одному или нескольким вариантам. В некоторых вариантах система 300 включает мобильный компьютер 104, центральный компьютер 106 и группу 108 датчиков, причем компоненты системы 300 связаны друг с другом по сети 302.
Мобильный компьютер 104 представляет собой вычислительное устройство (например, сервер, настольный компьютер, ноутбук, планшет и т.п.), содержащее центральный процессор 304, различные вспомогательные схемы 306 и запоминающее устройство 308. Центральный процессор 304 может содержать один или несколько микропроцессоров или микроконтроллеров, которые обеспечивают обработку данных и их промежуточное хранение. Различные вспомогательные схемы 306 обеспечивают работу центрального процессора 304 и могут содержать тактовые генераторы, шины, источники питания, схемы ввода/вывода и т.п. Запоминающее устройство (ЗУ) 308 включает постоянное ЗУ, оперативное ЗУ, ЗУ на магнитных дисках, ЗУ на оптических дисках, съемные устройства хранения информации и т.п. Запоминающее устройство 308 содержит различную информацию, такую как информация 310 карты, множество сегментов 312 карты, информация 314 деталей окружающей обстановки, информация 316 измерений положения, информация 317 ориентации транспортного средства, информация 318 прогнозируемого положения и маршрут 319. Запоминающее устройство 308 содержит различные программные модули, такие как модуль 320 навигации в физической среде.
Центральный компьютер 106 представляет собой вычислительное устройство (например, сервер, настольный компьютер, ноутбук, планшет и т.п.), содержащее центральный процессор 322, различные вспомогательные схемы 324 и запоминающее устройство 326. Центральный процессор 322 может содержать один или несколько микропроцессоров или микроконтроллеров, которые обеспечивают обработку данных и их промежуточное хранение. Различные вспомогательные схемы 324 обеспечивают работу центрального процессора 322 и могут содержать тактовые генераторы, шины, источники питания, схемы ввода/вывода и т.п. Запоминающее устройство 326 включает постоянное ЗУ, оперативное ЗУ, ЗУ на магнитных дисках, ЗУ на оптических дисках, съемные устройства хранения информации и т.п. Запоминающее устройство 326 содержит различные программные модули, такие как модуль 328 карты, а также различные данные, такие как данные задачи 330. Дополнительно запоминающее устройство 326 может содержать копию информации 310 полной карты и/или сегментов 312 карты.
Сеть 302 представляет собой систему связи, которая соединяет компьютеры по проводам, по кабелю, по волоконно-оптическому кабелю и/или по каналам беспроводной связи и работа которой обеспечивается различными известными компонентами сетей, такими как концентраторы, коммутаторы, маршрутизаторы и т.п. Сеть 302 может использовать различные хорошо известные протоколы для обмена информацией между ресурсами сети. Например, сеть 302 может быть частью сети Интернет или интрасети, использующей различную инфраструктуру связи, такую как Ethernet, WiFi, WiMax, GPRS и т.п.
Группа 108 датчиков соединена с мобильным компьютером 104, который присоединен к автоматическому транспортному средству, такому как вильчатый погрузчик (например, вильчатый погрузчик 200 фигуры 2), с возможностью обмена информацией. Группа 108 датчиков содержит множество устройств (датчиков) 332 для контроля физической среды и получения различной информации, которая записывается мобильным компьютером 104 как входные сообщения датчиков. В некоторых вариантах группа 108 датчиков может содержать любые сочетания лазерных сканеров и/или камер. В некоторых вариантах множество устройств 332 может быть установлено на автоматическом транспортном средстве. Например, лазерный сканер и камера могут быть прикреплены к грузоподъемной раме над вильчатым захватом. В другом варианте лазерный сканер и камера могут быть расположены под вильчатым захватом. Множество устройств 332 также могут быть распределены в физической среде и зафиксированы в различных местах среды.
В некоторых вариантах информация 310 полной карты содержит динамические и/или статические детали физической среды, такой как зона, в которой могут работать люди и автоматические промышленные транспортные средства. Информация 310 полной карты содержит информацию 340 деталей окружающей обстановки и информацию 342 ориентиров. В одном из вариантов информация деталей окружающей обстановки включает динамические и/или статические детали физической среды поблизости от транспортного средства, такой как зона, в которой работают люди и автоматические промышленные транспортные средства. Статические детали включают объекты, которые не изменяются в среде, например стены, стеллажи и т.п. Информация 310 полной карты может быть организована таким образом, чтобы формировался одномерный массив известных ориентиров, статических и динамических деталей. В некоторых вариантах информация 340 деталей включает: геометрические характеристики деталей (линии, углы, дуги и т.п.), положение деталей в глобальной системе координат и погрешности координат деталей. Обычно погрешность координат статических деталей равна нулю.
В некоторых вариантах динамические детали являются объектами, которые изменяются внутри среды, например временные препятствия, такие как сломанные поддоны, объекты, которые подлежат хранению и т.п. Такие детали могут быть стационарными в течение достаточного времени, чтобы система могла использовать их как детали карт для определения местонахождения динамических объектов. Система не содержит априорную информацию о положении этих деталей, и, соответственно, положение этих динамических деталей можно определять только на основе наложения измерений датчиков транспортных средств на положение этих средств в глобальной системе координат. Поскольку измерения датчиков содержат шумы, а также в связи с погрешностью определения положения транспортных средств, координаты всех динамических деталей содержат погрешности.
Физическая среда может быть разделена на зоны, информация по которым записывается во множестве сегментов 312 карты. Информация 314 деталей определяет детали (например, криволинейные и прямолинейные линии и т.п.), связанные с различными ориентирами. Эти ориентиры могут быть определены заранее и записаны в статической карте физической среды. Модуль 328 карты может назначать один или несколько объектов (например, выгруженные объекты, такие как изделие или поддон) в качестве ориентиров, которые соответствуют определенным сегментам, таким как некоторое помещение на складе.
В некоторых вариантах информация 318 прогнозируемого положения содержит расчетное местонахождение и/или ориентацию транспортного средства, которая указывается в настоящем описании как прогнозируемое положение транспортного средства. Модуль 320 навигации в физической среде может обеспечивать получение таких расчетных величин, используя предыдущее положение транспортного средства и модель его движения. Модуль 320 навигации в физической среде может также использовать фильтрацию для оценки погрешности и/или шумов для последующих стадий прогнозирования положения транспортного средства и обновления. После проверки информации 310 карты или одного из сегментов 312 карты модуль 320 навигации рассчитывает текущее положение транспортного средства. Погрешность положения транспортного средства приводит к погрешности определения положения наблюдаемых деталей окружающей обстановки. Погрешность положения в информации 312 деталей окружающей обстановки определяется погрешностью местонахождения транспортного средства и шумами датчиков.
В некоторых вариантах модуль 320 навигации в физической среде содержит команды, выполняемые процессором для определения местонахождения, а также формирования карты для промышленного транспортного средства. Модуль 320 навигации в физической среде уменьшает количество известных деталей (ориентиров), которые сравниваются с информацией 314 деталей, путем исключения частей информации 310 карты из обработки при определении местонахождения. В результате разделения информации 310 карты на сегменты 312 карты количество обрабатываемых статических и/или динамических ориентиров в любой момент ограничивается ориентирами в определенном сегменте карты, в котором работает промышленное транспортное средство. Когда промышленное транспортное средство, местонахождение которого определяет модуль 320 навигации в физической среде, выходит из определенного сегмента карты, модуль 320 выбирает новый сегмент 312. Модуль 320 может запросить сегмент 312 карты из центрального компьютера, или же центральный компьютер 106 может передавать новый сегмент в автоматическом режиме, когда транспортное средство пересекает границу предыдущего сегмента. В другом варианте модуль 320 навигации может содержать мобильный модуль 344 карты, который извлекает сегмент 312 карты из информации 310 карты, записанной на транспортном средстве. В любом случае модуль 328/344 карты (базовый или мобильный) формирует новый сегмент 312 карты, который соответствует части физической среды, в котором должна осуществляться навигация транспортного средства в его новом местонахождении. Соответственно, модуль 320 навигации в физической среде использует только те известные детали, которые связаны с новым сегментом 312 карты. В некоторых вариантах модуль 320 навигации в физической среде обновляет информацию 310 карты новыми динамическими деталями.
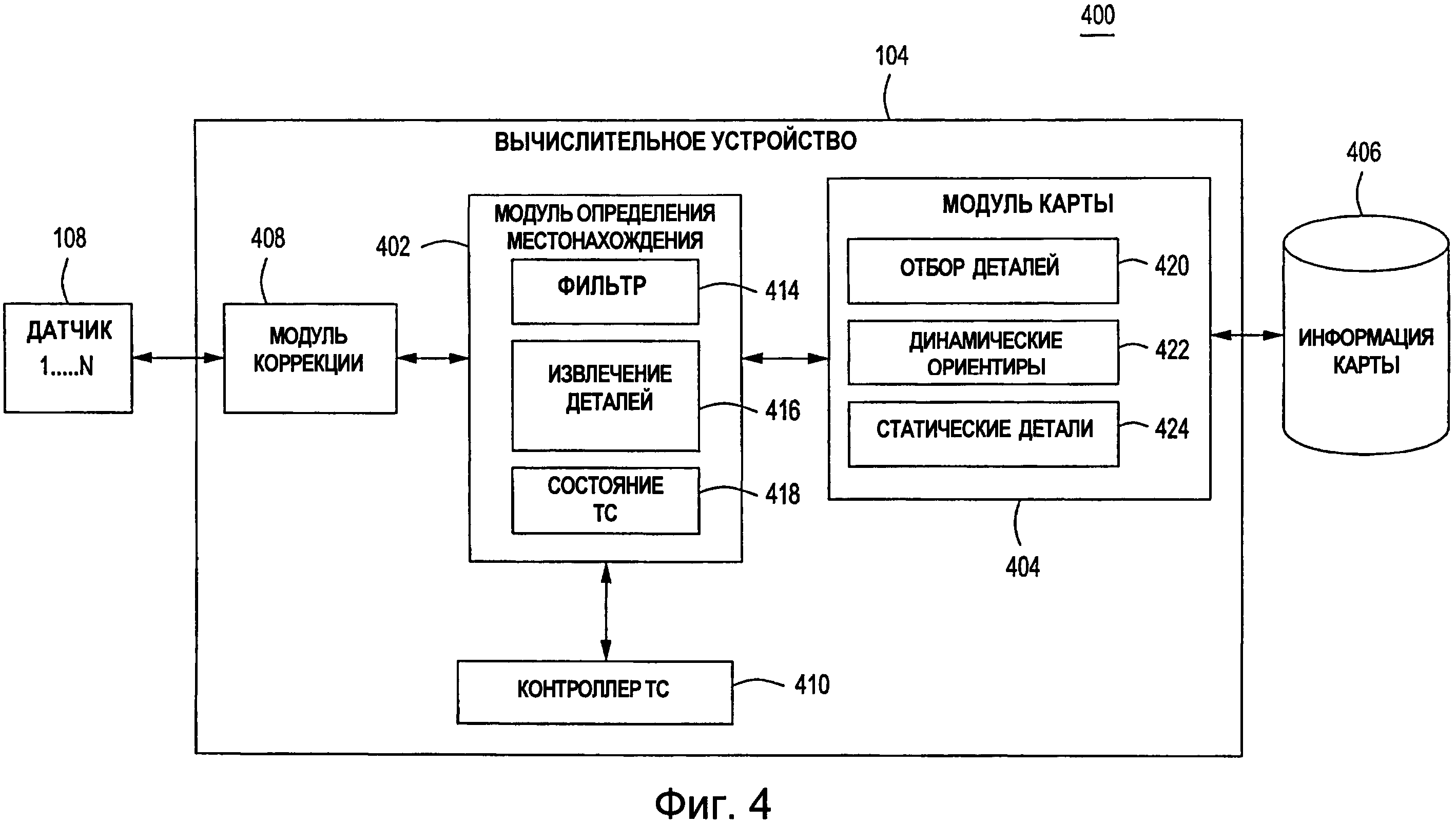
На фигуре 4 приведена функциональная блок-схема системы 400 обеспечения определения точного местонахождения промышленного транспортного средства (ТС) по одному или нескольким вариантам. Система 400 содержит мобильный компьютер 104, который соединен с промышленным транспортным средством, таким как вильчатый погрузчик, а также с группой 108 датчиков. Различные программные модули в мобильном компьютере 104 вместе формируют модуль навигации в физической среде (например, модуль 320 навигации фигуры 3).
Мобильный компьютер 104 содержит различные программные модули (компоненты) для выполнения функций навигации, такие как модуль 402 определения местонахождения, модуль 404 карты, модуль 408 коррекции и контроллер 410 транспортного средства. Мобильный компьютер 104 обеспечивает определение точных координат промышленного транспортного средства и обновляет информацию 406 карты данными, относящимися к деталям окружающей обстановки. Модуль 402 определения местонахождения содержит разные компоненты, такие как фильтр 414 и модуль 416 извлечения деталей для определения положения 418 транспортного средства. Модуль 404 карты содержит различную информацию, такую как динамические детали 422 и статические детали 424. Модуль 404 карты также содержит различные компоненты, такие как модуль 420 выбора деталей.
В некоторых вариантах информация датчиков корректируется в модуле 408 коррекции для исправления временных и/или пространственных искажений. Модуль 402 определения местонахождения обрабатывает откорректированную информацию и извлекает детали из информации датчиков, используя модуль 416 извлечения деталей. Эти детали согласуются с деталями из модуля 404 карты, причем в этом случае учитывается погрешность определения положения деталей и шумы датчиков, и затем состояние 418 транспортного средства корректируется фильтром 414. Положение 418 транспортного средства, которое моделируется фильтром 414, относится к текущему состоянию транспортного средства и включает информацию (например, координаты), которая определяет местонахождение, ориентацию, скорость, ускорение и другие характеристики транспортного средства. Модуль 402 определения местонахождения передает информацию, связанную с положением 418 транспортного средства в модуль 404 карты, а также в контроллер 410 транспортного средства. На основе информации о местонахождении и ориентации транспортного средства контроллер 410 осуществляет его навигацию к месту назначения.
В дополнение к фильтру 414 для вычисления положения 418 транспортного средства модуль 414 определения местонахождения также содержит модуль 416 извлечения деталей для определения деталей из откорректированной информации датчиков. Модуль карты 404 сравнивает положение 418 транспортного средства со статическими деталями 424 и динамическими деталями 422 для уменьшения количества деталей, которые должны обрабатываться, путем исключения деталей, которые в текущий момент не видны датчикам. В некоторых вариантах модуль 404 карты разделяет информацию 406 карты на множество сегментов карты, которые соответствуют определенным зонам физической среды. Модуль 420 выбора деталей управляет добавлением динамических деталей 422 к информации 406 карты и их модификацией. Модуль 420 выбора деталей может обновлять информацию 406 карты для указания зон, недавно занятых некоторыми деталями или освобожденных от этих деталей, таких как известные размещенные или отобранные единицы хранения.
Следует принимать во внимание, что в системе 400 для выполнения задачи навигации в физической среде может использоваться несколько вычислительных устройств. Любые из программных модулей вычислительного устройства 104 могут использоваться в разных физических аппаратных компонентах, таких как другие вычислительные устройства. Например, модуль 404 карты может выполняться на сервере (например, на центральном компьютере 102 фигуры 1) с использованием сети (например, сети 302 фигуры 1) для соединения с множеством мобильных вычислительных устройств для совместного использования информации 406 карты и ее обновления текущим местонахождением транспортного устройства и его ориентацией.
В некоторых вариантах модуль 402 коррекции обрабатывает входные сообщения датчиков, поступающие от различных источников информации, таких как группа 108 датчиков с разной периодичностью выборки и разной скоростью передачи информации, относящейся к положению 418 транспортного средства, а также с разными задержками. Модуль 402 коррекции извлекает из этих сообщений информацию измерений, относящуюся к положению транспортного средства. Модуль 402 коррекции проверяет отдельно каждое сообщение для обеспечения корректности каждого измерения.
На фигуре 5 представлена схема взаимодействия, иллюстрирующая способ 500 определения местонахождения и формирования карты для промышленного транспортного средства по одному или нескольким вариантам. В частности, способ 500 определения местонахождения и формирования карты включает блоки обработки и передачи различной информации между компонентами или уровнями 502, такие как блок 504 коррекции информации датчиков, блок 506 сопряжения, блок 508 извлечения деталей, блок 510 связывания данных, блок 512 расширенной фильтрации Калмана (EKF), а также блок 514 динамической карты. Способ 500 определения местонахождения, а также формирования карты поддерживает работу промышленных транспортных средств, используя в первую очередь детали окружающей обстановки. Блок 506 сопряжения, входящий в модуль навигации в физической среде, обеспечивает управление уровнями 502.
Блок 508 извлечения деталей проверяет информацию, полученную от датчиков, и извлекает обнаруженные детали (например, линии и углы). Блок 510 связывания данных сравнивает обнаруженные детали с информацией об известных деталях для определения соответствия обнаруженных деталей и имеющейся информации статических и/или динамических деталей. Блок 510 расширенной фильтрации Калмана (EKF) осуществляет обобщенную калмановскую фильтрацию, которая обеспечивает наиболее вероятное текущее положение транспортного средства на основе полученных измерений, связанных с совпадающими деталями, и предыдущего положения транспортного средства. Блок 514 динамической карты поддерживает актуальную динамическую карту деталей, которых нет на заранее составленной статической карте, для определения местонахождения.
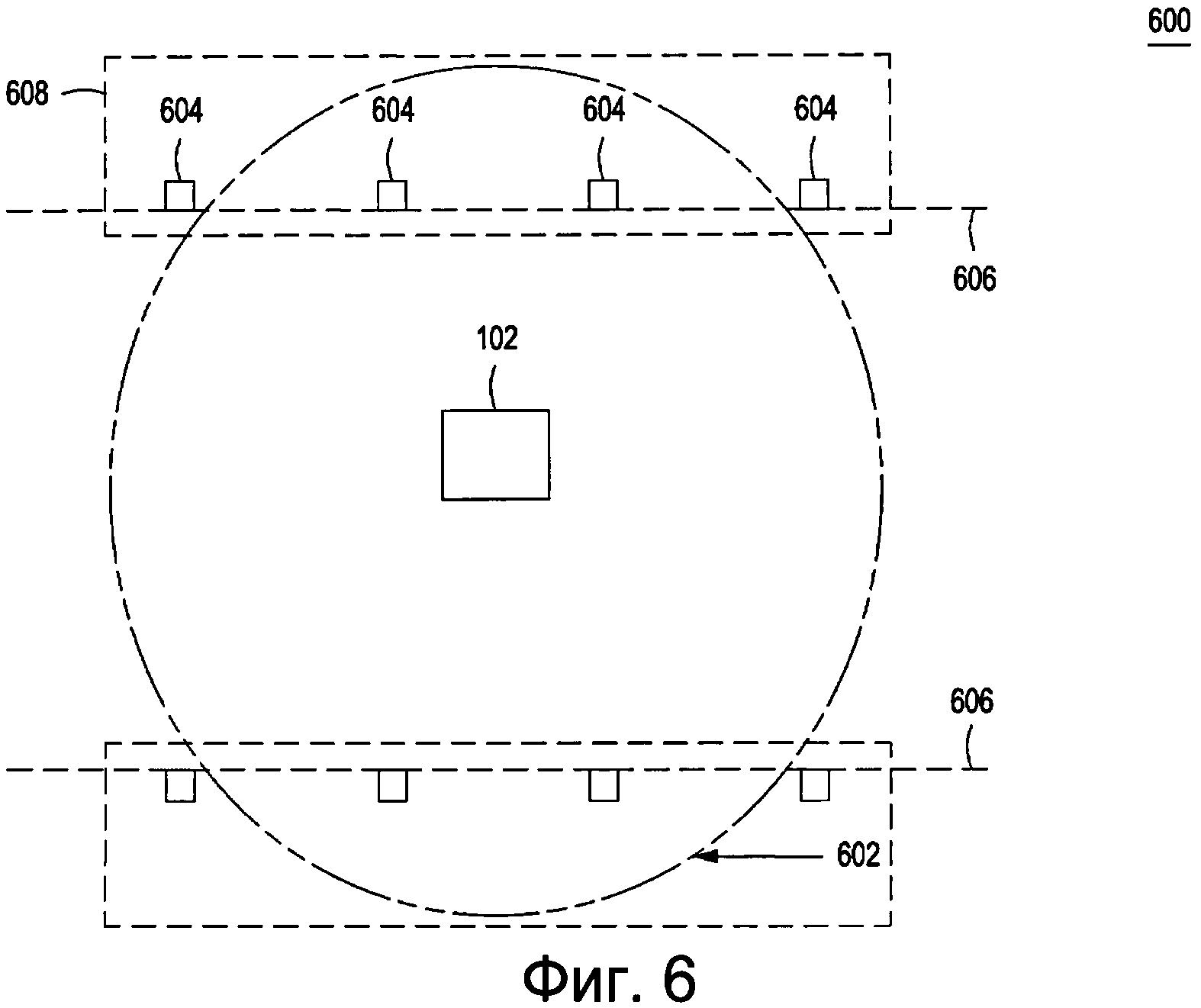
На фигуре 6 представлена схематическая иллюстрация карты для расчета положения промышленного транспортного средства 102 по одному или нескольким вариантам. Различные программные модули, записанные в компьютере, соединенном с промышленным транспортным средством 102, выполняют расчет 600 его местонахождения. Промышленное транспортное средство 102 использует различные датчики (например, множество устройств датчиков 332 фигуры 3) для получения информации об объектах, находящихся в зоне обзора. В частности, зона 602 обзора может относиться к зоне обзора, формируемой лазерными сканерами. Как это описывается ниже более подробно, промышленное транспортное средство получает информацию об ориентирах 604, по которой формируются линии 606 сетки для расчета положения транспортного средства по некоторым вариантам. Далее, ориентиры 604 объединяются для формирования компонента 608 инфраструктуры.
Физическая среда, такая как склад, содержит ориентиры, имеющие соответствующие детали, которые могут быть получены для определения местонахождения и формирования карты. Примеры таких деталей включают опоры рядом расположенных стеллажей, причем группа опор формирует компонент 608 инфраструктуры. Информация, связанная с компонентом инфраструктуры, такая как виртуальная линия или линия 606 сетки, соединяющая опоры стеллажей, может использоваться для определения местонахождения. В этом случае виртуальная деталь может рассматриваться модулем определения местонахождения (модулем 402 фигуры 4) как эквивалент виртуальной стенки. В том случае, когда транспортное средство 102 движется в проходе между двумя рядами стеллажей, используются две линии 606 сетки, которые формируют проход. Специалисты в данной области техники легко поймут, что получение виртуальных деталей по известным характеристикам физических деталей может помогать решению проблем на территории склада, где обычные ориентиры, такие как стенки или углы, не видны датчикам на протяжении большей части времени работы.
Используя лазерные сканеры, мобильный компьютер (например, мобильный компьютер 104 фигуры 1), соединенный с промышленным транспортным средством 102, идентифицирует опоры стеллажей, которые записываются в качестве ориентиров. Общие характеристики опор стеллажей указывают на то, что эти ориентиры связаны между собой. Например, опоры стеллажей имеют сходные или одинаковые размеры и форму, а также одинаковую ориентацию относительно друг друга. Промышленное транспортное средство 102 определяет линии, аппроксимирующие положение опор, для обеспечения линий 606 сетки, используемые для корректировки положения транспортного средства. При выполнении задачи в проходах между стеллажами стенки обычно находятся за пределами зоны 602 обзора. Поэтому эти линии 606 сетки или проход, формируемый двумя группами параллельных линий 606 сетки, могут использоваться для корректировки местонахождения транспортного средства и направления его движения. Линии 606 сетки и проход записываются как виртуальная деталь в карте, которая связана с опорами 604 стеллажей.
На фигуре 7 представлена функциональная блок-схема, иллюстрирующая способ 700 определения местонахождения и формирования карты для навигации промышленного транспортного средства по одному или нескольким вариантам. Поскольку информация датчиков поступает от множества датчиков 704, то модуль 702 коррекции времени и ошибок упорядочивает сообщения от датчиков по времени их получения. Модуль 706 определения геометрических характеристик анализирует откорректированную информацию датчиков и по этой информации формирует возможные варианты геометрических характеристик деталей. В некоторых вариантах выбираются известные стандартные детали 710 с использованием текущего положения 712 транспортного средства. Выбор может осуществляться в соответствии с конкретной зоной физической среды, ограничениями зоны обзора датчиков (например, зоны 602 обзора датчиков фигуры 6) или других критериев выбора, которые хорошо известны специалистам. Геометрические характеристики, получаемые по информации датчиков, связываются в блоке 708 с деталями окружающей обстановки в перечне идентифицированных деталей, передаваемом в фильтр 714. Соответственно, такое уменьшение количества обрабатываемых деталей упрощает обработку информации связи деталей и фильтрацию информации. Используя перечень деталей и откорректированную информацию датчика пройденного пути, фильтр 714 обновляет прогноз/расчет положения, а также информацию карты.
В общем случае фильтр 714 обеспечивает в режиме реального времени информацию о местонахождении автоматического промышленного транспортного средства или транспортного средства с ручным управлением. Фильтр 714 также обеспечивает получение информации о погрешности измерений положения транспортного средства. Таким образом, если промышленное транспортное средство двигается в пустом пространстве, где нет каких-либо деталей или маркеров, фильтр 714 продолжает обеспечивать точное местонахождение транспортного средства путем обновления его положения с определением указанной погрешности. В соответствии с требованиями по безопасности промышленное транспортное средство может работать в пределах заданной погрешности, прежде чем будет сформирован тревожный сигнал 718 ошибки.
На стадии коррекции времени и искажений модуль 704 получает измерения от каждого из измерительных устройств (датчиков). Измерения могут быть обеспечены лазером и/или камерой или датчиком любого другого типа, и из этих измерений могут быть получены детали окружающей обстановки. На стадии коррекции времени и искажений также корректируются любые искажения, которые могут возникать в связи с конечным временем измерений и скоростью движения промышленного транспортного средства. Эти искажения возникают, поскольку транспортное средство и датчики двигаются (например, в процессе сканирования). Модуль 706 извлекает из информации датчиков различные детали окружающей обстановки, такие как линии, углы, дуги или маркеры, которые обеспечиваются в стандартном формате геометрических характеристик для блока 708 связывания данных. Измерения положения, получаемые из датчиков 704, обеспечивают изменения координат, скорости или ускорения. Эти измерения используются для обновления расчетного положения промышленного транспортного средства. Перечень 710 известных деталей содержит карту физической среды. В блоке 708 связывания данных осуществляется сравнение подмножества перечня 710 известных деталей, обеспечиваемого блоком 712 выбора деталей, с полученными стандартными геометрическими характеристиками для получения расчетного положения транспортного средства.
В некоторых вариантах положение транспортного средства включает координаты X, Y, определяющие его местонахождение, а также направление его движения. Информация о пройденном расстоянии позволяет определить линейную скорость и угловую скорость. Линейная скорость относится к скорости колеса, над которым установлен кодовый датчик положения или устройство измерения скорости. Угловая скорость указывает, насколько изменилось направление движения транспортного средства в глобальной системе координат. Фильтр 714 корректирует положение транспортного средства, исключая шумы (шумы определения пройденного пути) путем моделирования процессов скольжения колеса (пропорционально линейной скорости) и углового скольжения (пропорционально угловой скорости).
На фигуре 8 представлена блок-схема способа разбиения информации карты на отдельные сегменты по одному или нескольким вариантам. В некоторых вариантах модуль навигации в физической среде (например, модуль 320 фигуры 3) или модуль формирования карты (например, модуль карты 328 фигуры 3) выполняет все стадии способа 800. В других вариантах некоторые стадии могут быть пропущены. Модуль навигации в физической среде записан в мобильном компьютере (например, в мобильном компьютере 104 фигуры 1), который функционально соединен с промышленным транспортным средством (например, с промышленным транспортным средством 102 фигуры 1). Модуль карты записан в центральном компьютере или в мобильном компьютере (например, в центральном компьютере 106 или в мобильном компьютере 104 фигуры 1), который обменивается информацией с промышленным транспортным средством, а также с одним или несколькими другими промышленными транспортными средствами. При выполнении задачи (например, задачи 330 фигуры 3) центральный компьютер передает в мобильный компьютер команды для навигации промышленного транспортного средства по определенному маршруту (например, по маршруту 319 фигуры 3). Выполнение способа 800 начинается на стадии 802 и продолжается на стадии 804.
На стадии 804 способа 800 осуществляется обработка информации карты (например, информации 310 карты фигуры 3). В некоторых вариантах модуль навигации в физической среде анализирует информацию карты для определения местонахождения промышленного транспортного средства. Перед тем как рассчитать маршрут транспортного средства, модуль навигации в физической среде должен определить точное положение транспортного средства. Модуль карты может дополнительно передавать информацию карты (например, информацию 310 карты фигуры 3) в мобильный компьютер. Такая информация карты может представлять полную карту всей физической среды (например, физической среды 100 фигуры 1) или же некоторый сегмент карты.
На стадии 806 способа 800 осуществляется разбиение информации карты на множество сегментов. Каждый сегмент карты может быть связан с некоторой зоной физической среды, такой как определенное помещение склада. Для осуществления разбиения информации карты в способе 800 используется информация деталей, привязанная к физической среде. В способе 800 определяется сегмент карты в соответствии с положением транспортного средства и другой доступной информацией, например с запланированным маршрутом транспортного средства. Такой сегмент содержит подмножество ориентиров, которые могут быть "видны" транспортному средству с учетом его положения и, например, запланированного маршрута. Эти ориентиры могут содержать статические, динамические и/или виртуальные детали.
На стадии 808 в способе 800 определяется текущее местонахождение транспортного средства. В некоторых вариантах способа 800 осуществляется обращение к информации карты для извлечения положения транспортного средства (например, положения 318 транспортного средства), которое включает его текущее местонахождение (координаты). На стадии 810 способа 800 формируется сегмент карты, который соответствует текущему местонахождению транспортного средства. Такой сегмент карты содержит информацию о деталях зоны физической среды, которые скорее всего будут "видны" промышленному транспортному средству.
На стадии 812 способа 800 осуществляется навигация промышленного транспортного средства с использованием рассчитанного сегмента карты. В соответствии с некоторыми вариантами модуль навигации в физической среде непосредственно управляет действиями транспортного средства и проводит его по маршруту. Когда промышленное транспортное средство выходит из этого сегмента, в соответствии со способом 800 определяется другой сегмент карты, который соответствует новому местонахождению транспортного средства. В некоторых вариантах модуль навигации в физической среде направляет в модуль карты запрос другого сегмента карты, и модуль карты формирует по запросу новый сегмент карты. В других вариантах модуль карты выбирает другой сегмент из множества сегментов карты.
В одном из вариантов сегменты карты формируются (или выбираются) в виде последовательности сегментов карты. Каждый сегмент обеспечивается модулем карты до того, как транспортное средство достигнет края текущего сегмента. В общем случае сегменты перекрываются, так что не возникает разрыв в информации карты, когда транспортное средство переходит из одного сегмента в другой сегмент.
Выполнение способа 800 заканчивается на стадии 814.
На фигуре 9 представлена блок-схема улучшенного способа 900 обработки информации карты по одному или нескольким вариантам. В некоторых вариантах модуль навигации в физической среде (например, модуль 320 фигуры 3) или модуль формирования карты (например, модуль карты 328/344 фигуры 3) выполняет все стадии способа 900. В других вариантах некоторые стадии могут быть пропущены. Модуль навигации в физической среде записан в мобильном компьютере (например, в мобильном компьютере 104 фигуры 1), который функционально соединен с промышленным транспортным средством (например, с промышленным транспортным средством 102 фигуры 1). Модуль карты записан в центральном компьютере или в мобильном компьютере, который обменивается с информацией с промышленным транспортным средством, а также с одним или несколькими другими промышленными транспортными средствами. При выполнении задачи (например, задачи 330 фигуры 3) центральный компьютер передает в мобильный компьютер команды для навигации промышленного транспортного средства по определенному маршруту (например, по маршруту 319 фигуры 3).
Выполнение способа 900 начинается на стадии 902 и продолжается на стадии 904. На стадии 904 способа 900 осуществляется обработка информации карты путем отбора из карты подмножества деталей, которые скорее всего будут "видны" промышленному транспортному средству. Обработка информации карты будет уменьшать количество ориентиров и, соответственно, деталей, которые должны обрабатываться промышленным транспортным средством в окружающей его зоне. На стадии 906 способа 900 определяются ориентиры, имеющие общие детали, на которые могут быть отображены виртуальные ориентиры. Такие ориентиры могут быть статическими (например, опоры стеллажей) или динамическими (например, поддоны, установленные в процессе работы системы). На стадии 908 выбранные ориентиры отображаются на виртуальные ориентиры, записанные в карте (например, проход, формируемый рядами стеллажей). На стадии 910 все ориентиры раскрываются в деталях, которые могут быть обнаружены группой 108 датчиков, связанных с промышленным транспортным средством. Эти детали могут быть геометрическими характеристиками физических ориентиров, такими как линии или дуги.
На стадии 912 способа 900 информация карты обновляется информацией отобранных деталей. В некоторых вариантах информация деталей согласуется с информацией известных деталей для компонента инфраструктуры. Например, в способе 900 осуществляется сравнение информации деталей с известной информацией размеров системы стеллажей. На стадии 914 в способе 900 определяется прогнозируемое положение транспортного средства в соответствии с информацией датчика пройденного расстояния (например, информация 318 прогнозируемого положения фигуры 3). В некоторых вариантах в способе 900 проверяется предыдущее положение транспортного средства и рассчитывается его новое положение через некоторый временной интервал. На стадии 916 способа 900 осуществляется обработка измерений положения транспортного средства. На стадии 918 способа 900 корректируется прогнозируемое положение транспортного средства. После получения информации измерений положения (например, информации 316 измерений положения фигуры 3), относящейся к одному или нескольким ориентирам, в способе 900 осуществляется обновление прогнозируемого положения транспортного средства для получения его точного положения.
На стадии 920 способа 900 определяется необходимость перерасчета маршрута (например, маршрута 319 фигуры 3) в связи с изменением карты, чтобы выполнить задачу. Если определяется, что необходимо заново рассчитать маршрут, следует переход на стадию 922. Если же перерасчет маршрута не нужен, следует переход на стадию 924. На стадии 922 способа 900 осуществляется перерасчет маршрута. На стадии 924 способа 900 определяется необходимость продолжения определения местонахождения и формирования карты для выполнения задачи. Если определяется, что необходимо продолжать определение местонахождения и формирование карты, следует переход на стадию 912. Если же продолжение не нужно, следует переход на стадию 926. Выполнение способа 900 заканчивается на стадии 926.
Различные элементы, устройства и модули раскрыты в настоящем описании в связи с их соответствующими функциями. Эти элементы, устройства и модули являются средствами выполнения их соответствующих вышеописанных функций.
Хотя все вышеизложенное относится к некоторым вариантам осуществления настоящего изобретения, однако могут быть предложены и другие варианты, не выходящие за пределы объема изобретения, который определяется прилагаемой формулой.

Способ и система использования отличительных ориентиров для определения местонахождения промышленных транспортных средств в начале работы
Способ и система определения точного местонахождения промышленного транспортного средства
Способ и устройство, позволяющее использовать объекты с предварительно установленными координатами для определения местоположения промышленных транспортных средств
Способ и система для совместного использования информации карт, связанной с автоматическими промышленными транспортными средствами
Способ и система использования отличительных ориентиров для определения местонахождения промышленных транспортных средств в начале работы
Способ и система определения точного местонахождения промышленного транспортного средства
Способ и устройство, позволяющее использовать объекты с предварительно установленными координатами для определения местоположения промышленных транспортных средств
Способ и система для совместного использования информации карт, связанной с автоматическими промышленными транспортными средствами

