Результат интеллектуальной деятельности: ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПОВЕРХНОСТИ УПРАВЛЕНИЯ ВОЗДУШНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И ВОЗДУШНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ, ОБОРУДОВАННЫЙ ТАКИМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к электромеханическому исполнительному механизму подвижной поверхности управления полетом воздушного летательного аппарата, например самолета.
В качестве примера такой поверхности управления полетом приводится элерон, элевон или интерцептор.
Уровень техники
В общем, электромеханический исполнительный механизм подвижной поверхности управления полетом воздушного летательного аппарата содержит электродвигатель, имеющий выходной вал с первым и вторым направлениями вращения, и трансмиссию для перемещения, соединяющую выходной вал электродвигателя с подвижной поверхностью управления полетом. Электродвигатель управляется блоком управления, который принимает команды от блока управления полетом воздушного летательного аппарата.
Потеря мощности применительно к таким исполнительным механизмам может привести к катастрофическим последствиям в результате перемещения элерона/элевона/интерцептора, создающего риск разбалансировки самолета, увеличения его сопротивления или повреждения его конструкции из-за вибрации (явление, известное как «флаттер»).
Раскрытие изобретения
Задача настоящего изобретения состоит в том, чтобы предложить средства устранения вышеуказанного недостатка.
С этой целью изобретение предлагает электромеханический исполнительный механизм для подвижной поверхности управления полетом воздушного летательного аппарата, при этом исполнительный механизм содержит электродвигатель, имеющий выходной вал с первым и вторым направлениями вращения, трансмиссию для перемещения, соединяющую выходной вал электродвигателя с подвижной поверхностью управления полетом, и блок управления для управления электродвигателем. Трансмиссия включает в себя храповую собачку, оказывающую противодействие трансмиссии для перемещения в первом направлении вращения, и блок управления соединен с элементом освобождения храповой собачки, так чтобы обеспечивать передачу движения в первом направлении вращения.
Таким образом, для противодействия трансмиссии для перемещения в первом направлении вращения нет необходимости подавать питание на электродвигатель.
Изобретение также предлагает воздушный летательный аппарат, имеющий крылья, каждое из которых снабжено по меньшей мере одной подвижной аэродинамической поверхностью элерона/элевона/интерцептора, связанной по меньшей мере с одним таким исполнительным механизмом, при этом исполнительный механизм устанавливается таким образом, что храповая собачка противодействует отклонению аэродинамической поверхности.
Другие характеристики и преимущества изобретения станут понятными после изучения приведенного ниже описания конкретных неограничивающих вариантов выполнения изобретения.
Краткое описание чертежей
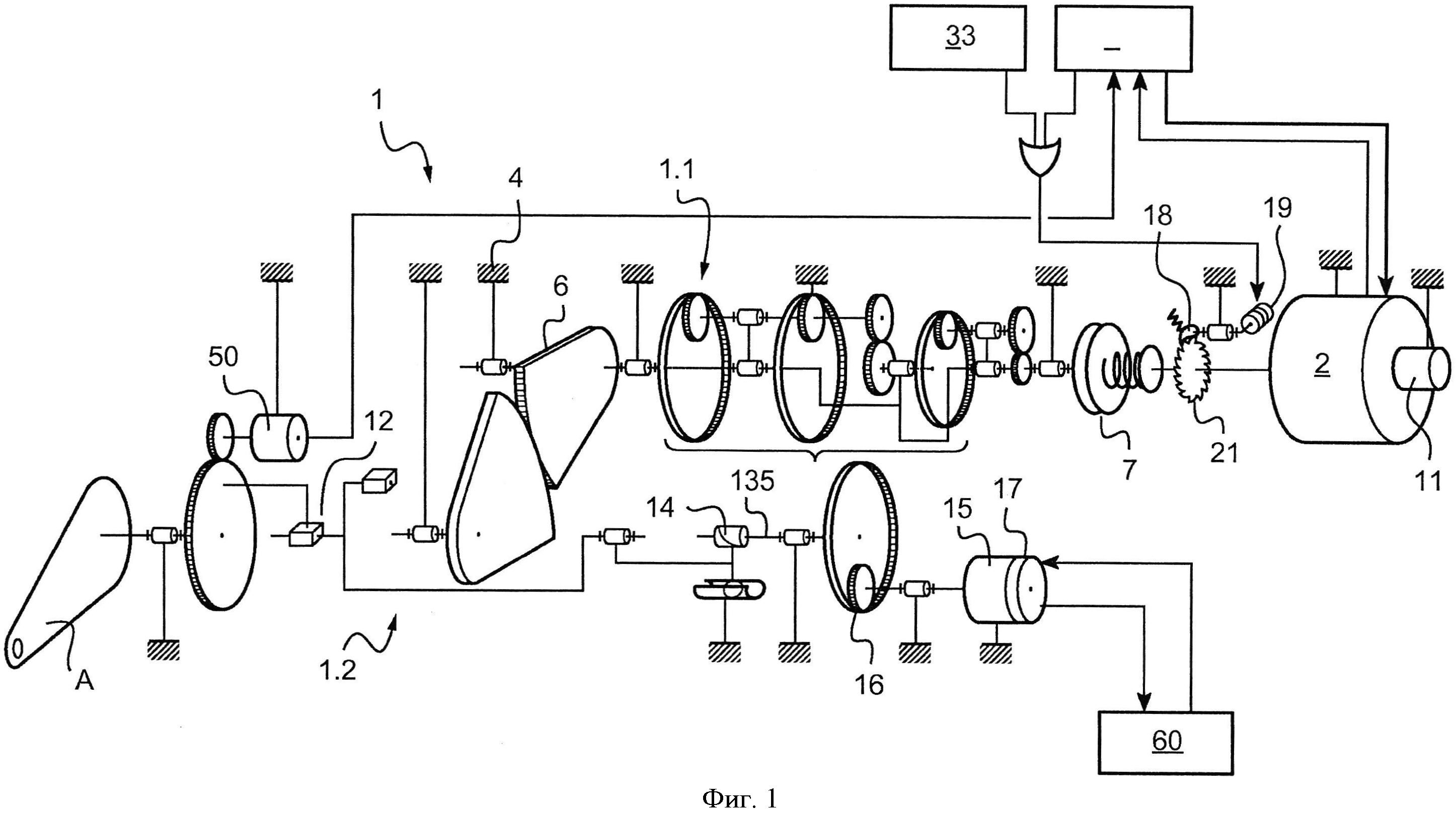
Фиг. 1 - кинематическая схема исполнительного механизма по первому варианту выполнения;
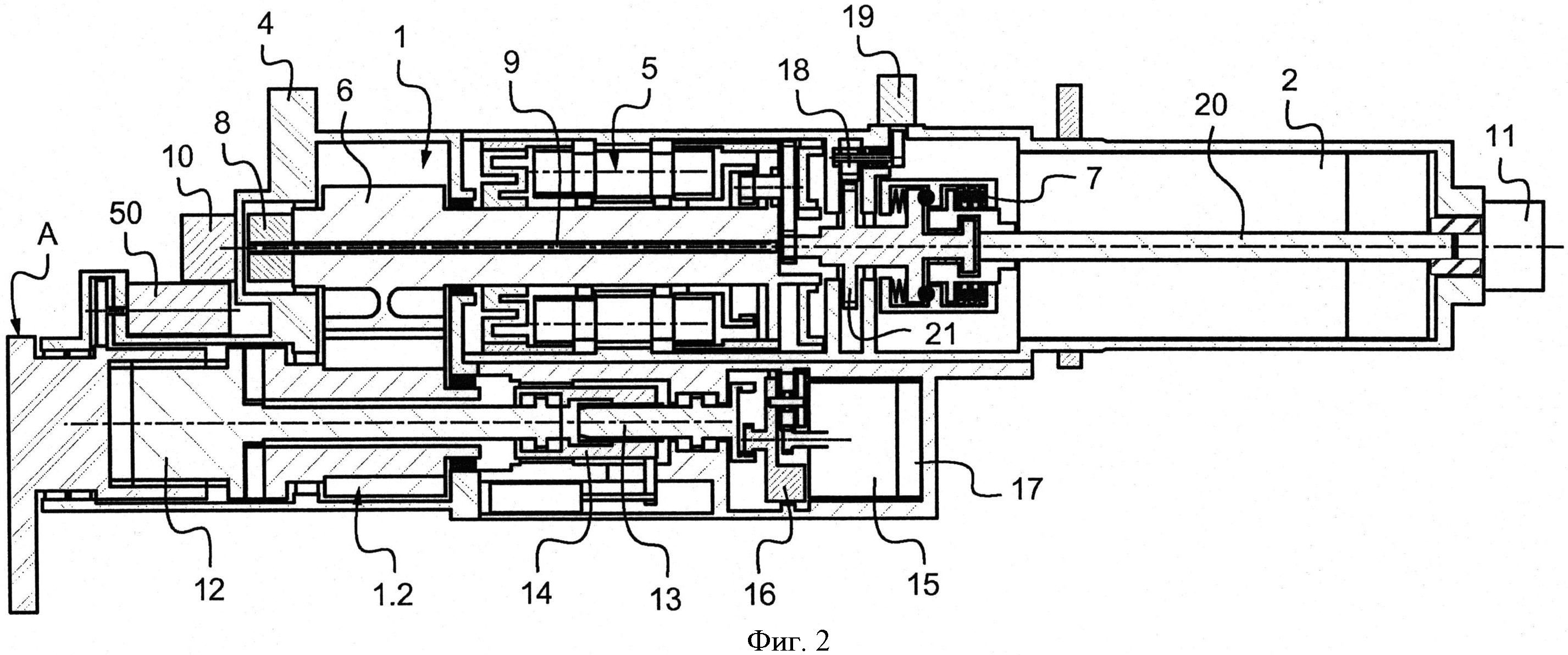
фиг. 2 - вид в продольном разрезе исполнительного механизма на фиг. 1;
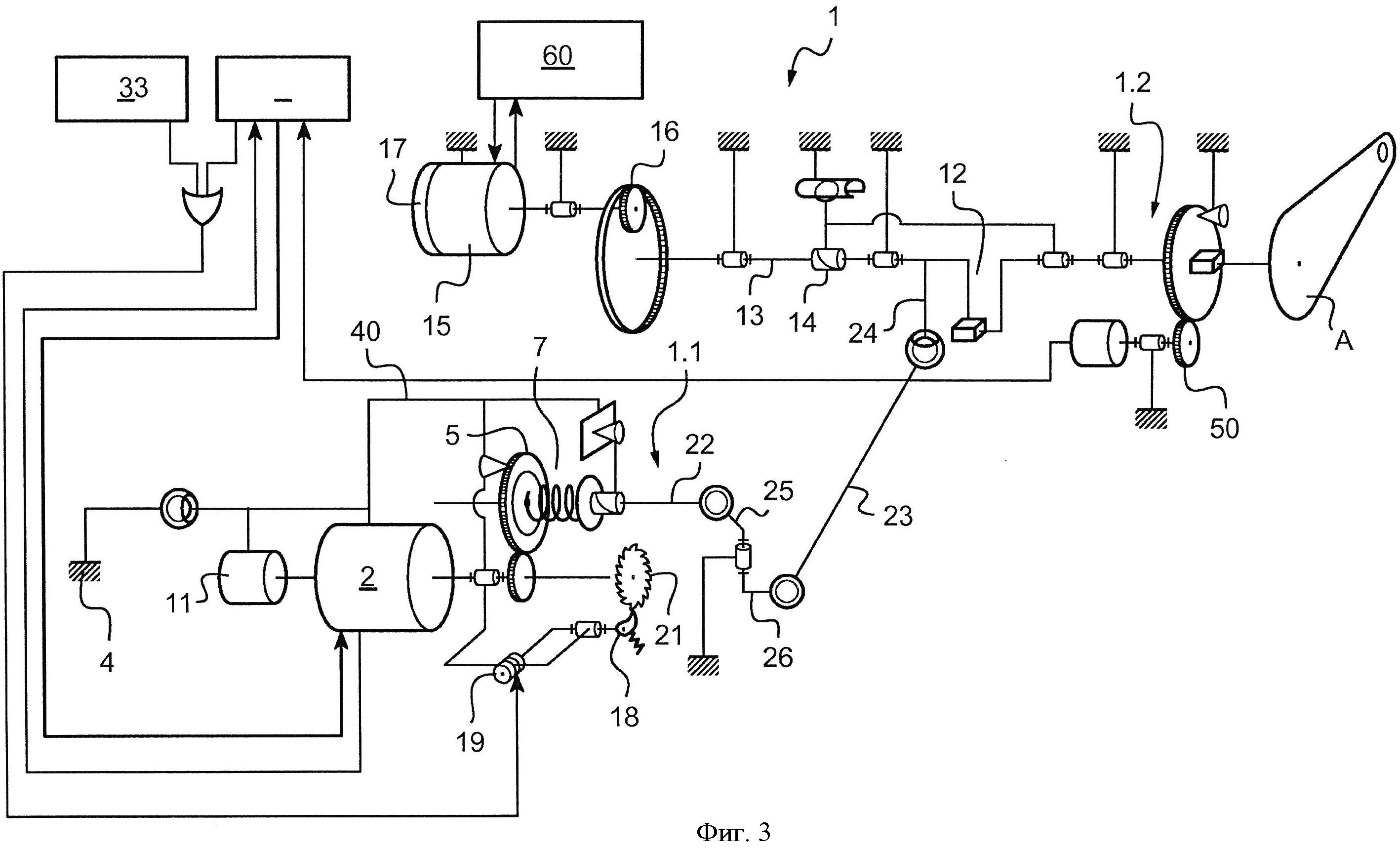
фиг. 3 - кинематическая схема исполнительного механизма по второму варианту выполнения;
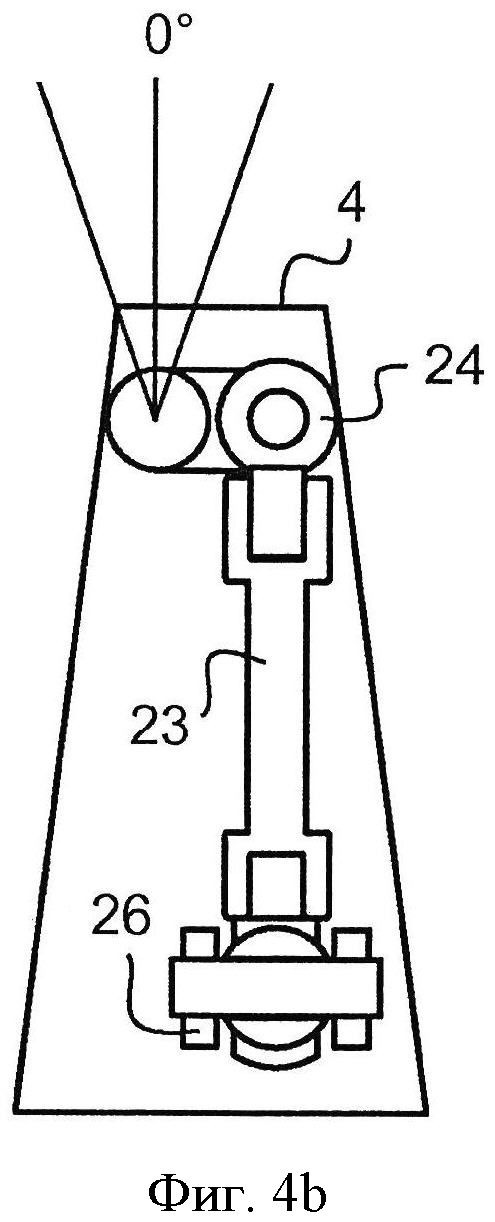
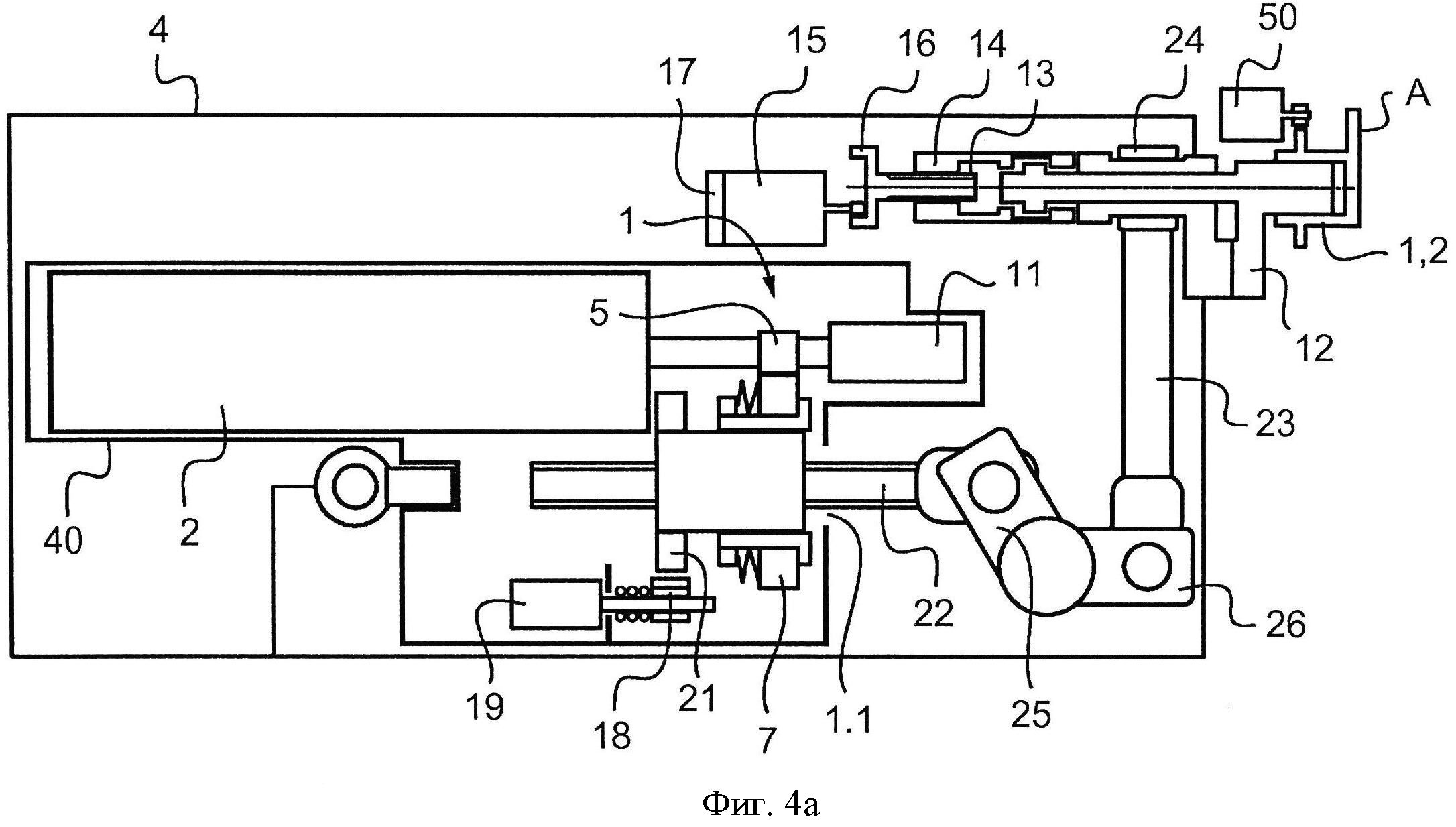
фиг. 4a и фиг. 4b - соответственно вид в продольном разрезе и вид в поперечном разрезе исполнительного механизма на фиг. 3;
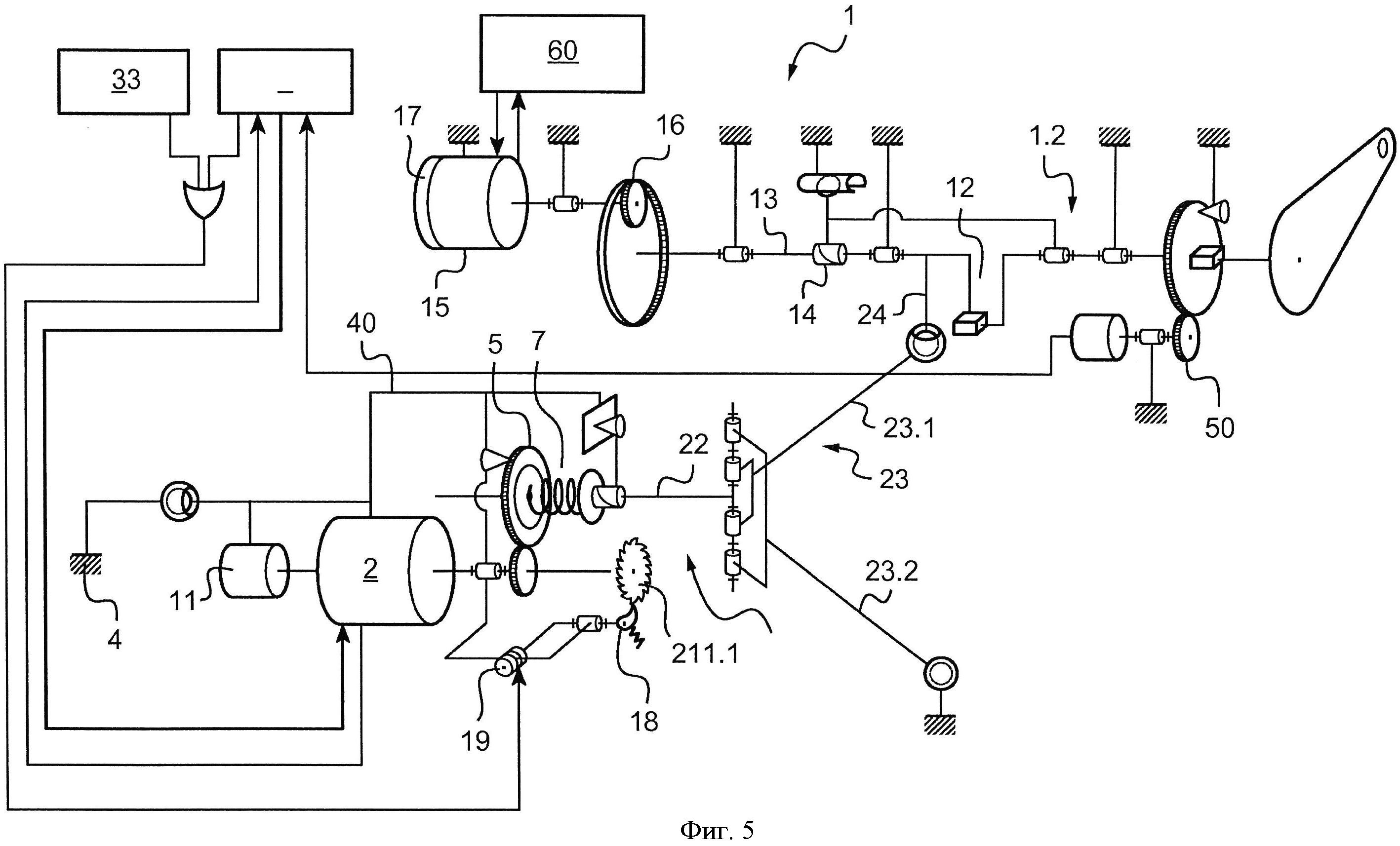
фиг. 5 - кинематическая схема исполнительного механизма по третьему варианту выполнения; и
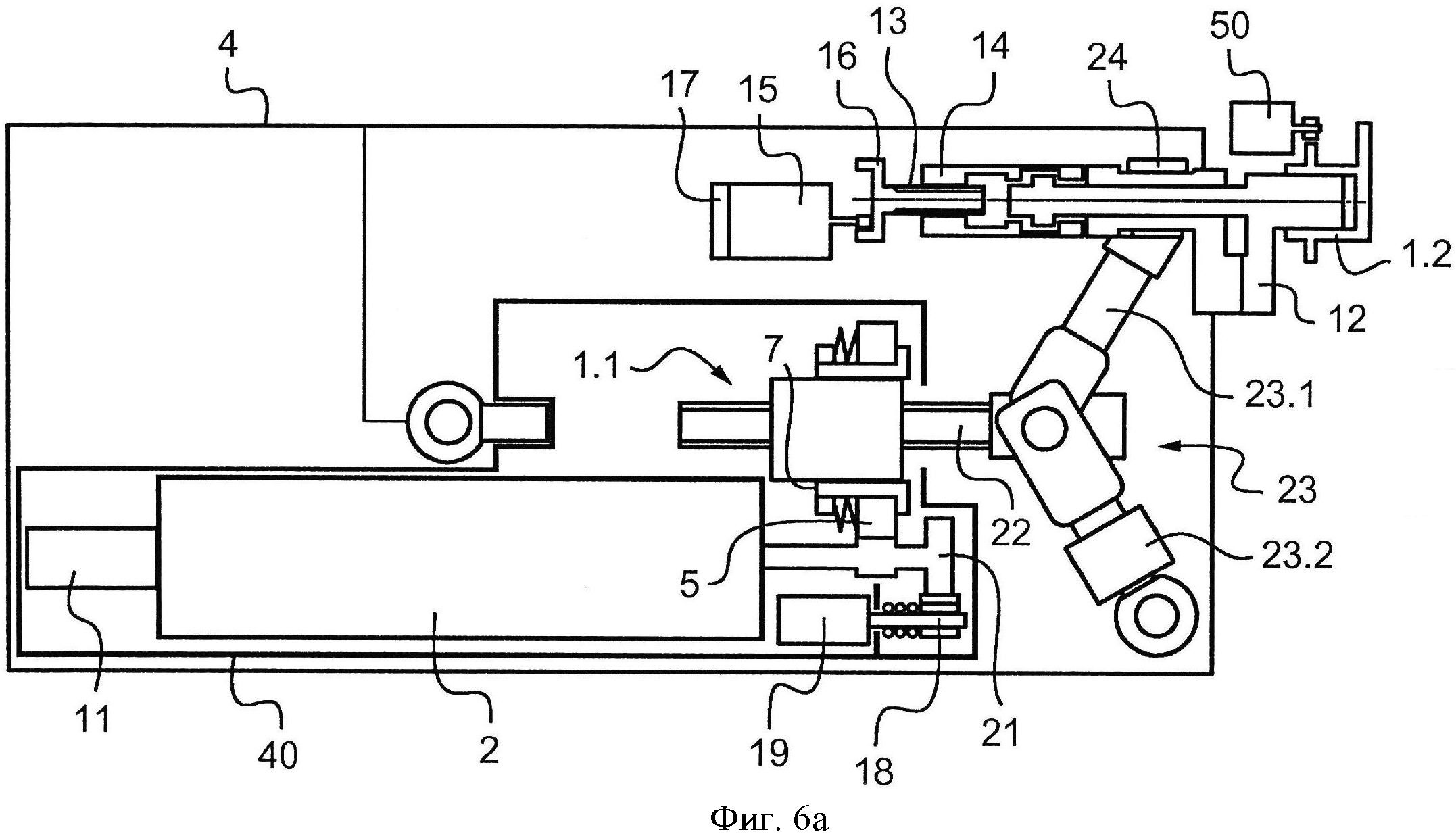
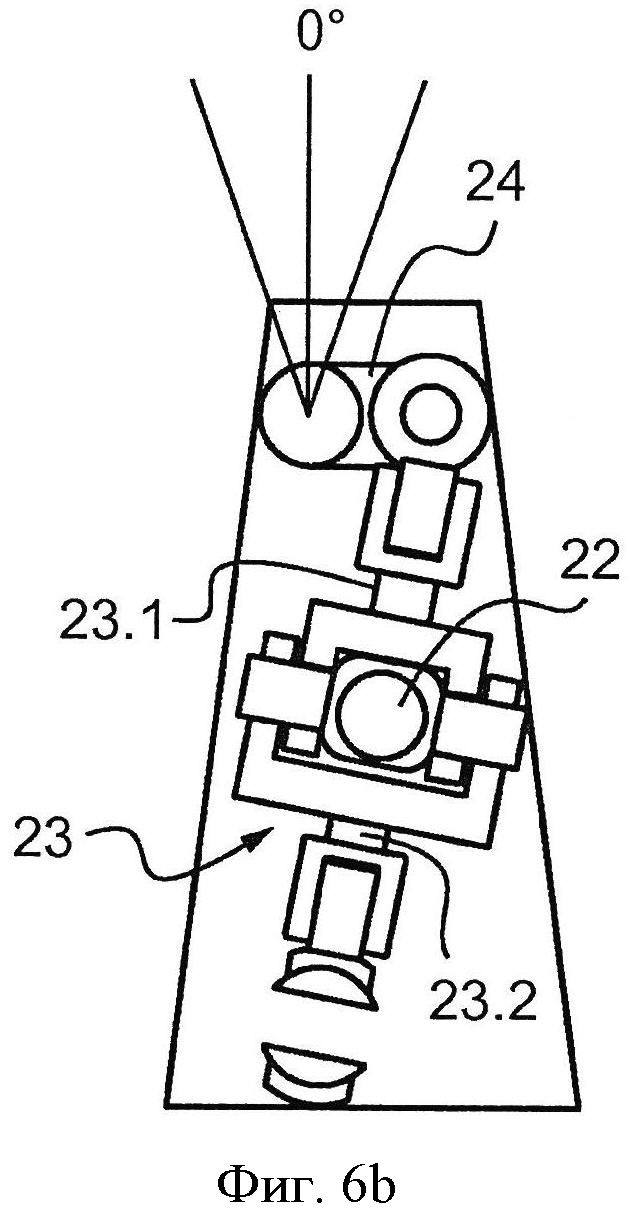
фиг. 6a и фиг. 6b - соответственно вид в продольном разрезе и вид в поперечном разрезе исполнительного механизма на фиг. 5.
Осуществление изобретения
Со ссылкой на чертежи описываемое ниже изобретение относится к приведению в действие элерона/элевона/интерцептора, подвижно установленного на задней кромке крыла воздушного летательного аппарата. Элерон/элевон/интерцептор крепится к качалке или промежуточному устройству, обозначенному на чертежах ссылочным индексом A.
Исполнительный механизм изобретения является механизмом электромеханического типа.
В общем, качалка A элерона/элевона/интерцептора приводится в действие через трансмиссию, обозначенную общим ссылочным номером 1, с помощью электродвигателя 2, который управляется двумя электронным блоками 3 управления, получающими сигналы от датчика 50 углового положения.
Наличие двух идентичных блоков 3 управления обеспечивает резервирование, когда один из блоков управления заменяет другой блок управления в случае неисправности другого блока.
В этом примере трансмиссия 1 разделена на две линии для ограничения общей длины и содержит первую линию 1.1 валов и вторую линию 1.2 валов.
Ниже приводится описание первого варианта выполнения изобретения со ссылкой на фиг. 1 и 2.
Исполнительный механизм содержит корпус 4, образующий неподвижную конструкцию, и этот корпус крепится в крыле воздушного летательного аппарата, например, болтами, и в нем расположены электродвигатель 2 и трансмиссия 1 для передачи движения.
Электродвигатель 2 является электродвигателем бесщеточного типа и имеет выходной вал 20, соединенный с трансмиссией 1. При надлежащей подаче питания электродвигатель 2 приводит выходной вал 20 во вращение в одном из двух противоположных направлений вращения, которые упоминаются, соответственно, как первое и второе направления вращения.
Как известно, трансмиссия 1 содержит ряд зубчатых передач, обеспечивающих получение заданного передаточного числа для перемещения элерона/элевона/интерцептора при заданных условиях его функционирования. В этом примере зубчатые передачи содержат группу 5 последовательно расположенных планетарных зубчатых передач, именуемых «гнездовая передача», и передачу из параллельных шестерней 6. Передача из параллельных шестерней 6 передает движение первой линии 1.1 валов на вторую линию 1.2 валов. Неподвижные наружные кольца планетарных передач с направленными внутрь зубьями крепятся непосредственно к внутренней стенке корпуса 4 для ограничения общего размера исполнительного механизма и упрощения конструкции. Крутящий момент и скорость применительно к передаваемому движению зависят от отношений чисел зубьев между различными шестернями. Эти зубчатые передачи не описываются подробно.
Ограничитель 7 крутящего момента расположен перед группой 5. Ограничитель 7 крутящего момента является ограничителем фрикционного типа и содержит две пластины, которые упруго прижимаются друг к другу, а именно: входную пластину, которая вращается с выходным валом 20 электродвигателя 2, и выходную пластину, которая вращается с входной шестерней группы 5. Ограничитель 7 крутящего момента обеспечивает пассивное ограничение крутящего момента. Также предусмотрен датчик 8 нагрузки, который соединен с блоком 3 управления, который управляет электродвигателем 2, при этом датчик нагрузки обеспечивает, что нагрузка, действующая на трансмиссию 1, не превышает заданное пороговое значение. Датчик 8 нагрузки генерирует измерительный сигнал применительно к скручиванию вала трансмиссии 1 относительно указателя 9. Измерительный сигнал передается на приемник 10 через преобразователь с целью исключить использование грубой трассировки или контактных колец.
Трансмиссия 1 также включает в себя демпфер 11, который используется в случае, если электронный блок 3 управления не запитан. В этом примере демпфер 11 расположен за электродвигателем 2 на корпусе 4, и выходной вал 20 имеет конец, который выступает из корпуса 4 и вращается с демпфером 11.
Исполнительный механизм включает в себя муфту 12, которая расположена вблизи выхода из трансмиссии на второй линии 1.2 валов и имеет выход, который соединен с качалкой A. Муфта 12 приводится в действие через устройство линейного исполнительного механизма, содержащее систему 13, 14 винт-гайка, соединенную с поворотным электродвигателем 15 через набор 16 шестерней. Положение гайки 14 устройства исполнительного механизма для муфты 12 определяется датчиком 17. Поворотный электродвигатель 15 соединен с узлом 60 управления полетом воздушного летательного аппарата, так чтобы качалка A свободно перемещалась в случае защемления какого-либо элемента исполнительного механизма.
Трансмиссия 1 включает в себя храповую собачку 18, оказывающую противодействие трансмиссии для перемещения в первом направлении вращения, и блок 3 управления соединен с элементом 19 освобождения храповой собачки 18, так чтобы обеспечить передачу движения в первом направлении вращения. Храповая собачка 18 имеет один конец, прикрепленный для поворачивания в корпусе 4, и свободный конец, который упруго прижимается к зубьям храпового колеса 21, которое вращается с выходным валом 20 электродвигателя 2. Элемент 19 освобождения храповой собачки содержит электромагнит, который при запитывании удерживает свободный конец храповой собачки 18 на удалении от зубьев храпового колеса 21. Таким образом, когда электромагнит не запитан (элемент освобождения деактивируется), в частности, когда блок 3 управления не запитан (или все блоки управления запитаны, если рассматриваемый элерон/элевон/интерцептор связан с несколькими блоками управления), свободный конец храповой собачки 18 упруго возвращается к зубьям и препятствует перемещению, передаваемому в первом направлении вращения.
Электродвигатель 2. храповая собачка 18, ограничитель 7 крутящего момента, демпфер 11 и зубчатые передачи 5, 6 установлены на первой линии 1.1 валов.
Муфта 12 установлена во второй линии 1.2 валов, которая соединена с качалкой A. Датчик 50 углового положения измерительного преобразователя вращательных перемещений установлен на выходном валу второй линии 1.2 валов.
В приведенном ниже описании второго и третьего вариантов выполнения изобретения элементы, идентичные или аналогичные элементам, описанным выше, обозначены идентичными цифровыми ссылками.
В вариантах выполнения на фиг. 3-6 трансмиссия 1 показана в упрощенном виде, в частности, что касается ее зубчатых передач.
Как указано выше, исполнительный механизм содержит корпус 4, содержащий все компоненты исполнительного механизма. Исполнительный механизм включает в себя вспомогательный корпус, образующий усиливающий элемент 40, в котором размещается первая линия 1.1 валов, т.е. электродвигатель 2, ограничитель 7 крутящего момента, демпфер 11, храповая собачка 18, элемент 19 освобождения и храповое колесо 21, и который с помощью шарнира крепится в корпусе 4. Компоновка этих элементов, по существу, такая же, как и в первом варианте выполнения.
Вторая линия 1.2 валов и муфта 12 установлены в корпусе 4 снаружи усиливающего элемента 40.
После храповой собачки и ограничителя 7 крутящего момента выход первой линии 1.1 валов соединен с элементом для преобразования вращательного движения в поступательное движение ползуна 22. В этом примере ползун 22 является резьбовой штангой, вставленной в гайку, соединенную с выходом ограничителя 7 крутящего момента. Ползун 22 соединен соединительной штангой 23 с эксцентриковым элементом 24, предназначенным для вращения с валом второй линии 1.2 валов и, таким образом, с элероном/элевоном/интерцептором.
Выходной вал 20 электродвигателя 2 параллелен поворотной оси элерона/элевона/ интерцептора, и соединительная штанга 23 продолжается в направлении, по существу перпендикулярном поворотной оси элерона/элевона/интерцептора.
Со ссылкой на фиг. 3 и 4 и по второму варианту выполнения ползун 22 шарнирно крепится к рычагу 25 качалки для поворачивания эксцентрикового пальца 26, с которым соединена соединительная штанга 23.
Понятно, что поступательное перемещение ползуна 22 вынуждает качалку и узел 25, 26 в сборе поворачиваться, тем самым поступательно перемещая соединительную штангу 23 и толкая или вытягивая эксцентриковый элемент 24 и вынуждая поворачиваться выходной вал второй линии 1.2 валов трансмиссии 1.
Со ссылкой на фиг. 5 и 6 и по третьему варианту выполнения соединительная штанга 23 содержит первый сегмент 23.1, шарнирно соединенный с эксцентриковым элементом 24 и с ползуном 22, и второй сегмент 23.2, шарнирно соединенный с корпусом 4 и ползуном 22.
Понятно, что поступательное перемещение ползуна 22 изменяет угол между сегментами 23.1 и 23.2 соединительной штанги и, таким образом, изменяет расстояние между концом сегмента 23.1, соединенным с эксцентриковым элементом 24, и концом сегмента 23.2, соединенным с корпусом 4. Конец сегмента 23.1, соединенный с эксцентриковым элементом 24, перемещает эксцентриковый элемент 24 и вынуждает поворачиваться выходной вал второй линии 1.2 валов трансмиссии 1.
Разумеется, изобретение не ограничивается до описанных вариантов выполнения и распространяется на любой вариант, соответствующий объему изобретения, как определено в формуле изобретения.
В частности, трансмиссия может быть конструкцией, которая отличается от описанной конструкции. Положения муфты, ограничителя крутящего момента, храповой собачки и зубчатых передач могут быть модифицированы. Трансмиссия и линии валов могут содержать сегменты, которые являются концентричными или параллельными. Линии валов могут быть параллельными или они могут быть наклонены относительно друг друга.
Храповая собачка может быть предусмотрена для каждого направления вращения.
Во втором и третьем вариантах выполнения шарнирное соединение между усиливающим элементом 40 и корпусом 4 с помощью сферического шарнира является оптимальным, и такое соединение может быть внедрено в первую линию валов.
Также можно исключить внедрение исполнительного механизма в корпус или внедрить в корпус только часть исполнительного механизма. Корпус 4 может быть заменен опорной конструкцией.
Демпфер 11 может быть установлен между передним концом выходного вала и усиливающим элементом 40.
Приводное устройство узла, управляемое автоматически или вручную, с обнаружением перехода на ручное управление
Гироскопический датчик
Индукционный датчик и способ изготовления такого индукционного датчика
Способ пайки, гироскоп и паяный узел
Гиродатчик и способ его изготовления
Оценка общего и частного движения
Инерциальный датчик угловой скорости типа балансной мэмс и способ балансировки такого датчика
Способ одновременной работы приводов для перемещения закрылков воздушного судна, устройство привода закрылков воздушного судна и воздушное судно, снабженное таким устройством
Способ коррекции измерения напряжения на контактах датчика
Силовой привод с многофазным двигателем и способ управления таким силовым приводом
Приводное устройство узла, управляемое автоматически или вручную, с обнаружением перехода на ручное управление
Гироскопический датчик
Индукционный датчик и способ изготовления такого индукционного датчика
Способ пайки, гироскоп и паяный узел
Гиродатчик и способ его изготовления
Оценка общего и частного движения
Инерциальный датчик угловой скорости типа балансной мэмс и способ балансировки такого датчика
Способ одновременной работы приводов для перемещения закрылков воздушного судна, устройство привода закрылков воздушного судна и воздушное судно, снабженное таким устройством
Способ коррекции измерения напряжения на контактах датчика
Силовой привод с многофазным двигателем и способ управления таким силовым приводом

