Результат интеллектуальной деятельности: СИЛОВОЙ ПРИВОД С МНОГОФАЗНЫМ ДВИГАТЕЛЕМ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ СИЛОВЫМ ПРИВОДОМ
Вид РИД
Изобретение
Настоящее изобретение относится к силовому приводу, имеющему многофазные двигатели и используемому, в частности, для перемещения подвижного элемента. В варианте применения изобретения для самолетов такой подвижный элемент может представлять собой, например, подвижную поверхность самолета для управления полетом, такую как элерон, управляемая поверхность которого перемещается для того, чтобы обеспечить пилотирование самолетом.
Известны силовые приводы, которые имеют однофазный двигатель или двигатель постоянного тока со щетками, в которых ротор присоединяется к подвижному элементу с помощью узла трансмиссии для перемещения. Когда такие силовые приводы используются на самолете для управления полетом, оборудование выполняется таким образом, чтобы обеспечивать взаимодействие каждой подвижной поверхности, которая управляет полетом по меньшей мере с двумя силовыми приводами, каждый из которых располагается таким образом, чтобы он был способен самостоятельно перемещать вышеуказанную поверхность, которая управляет полетом. Таким образом, в том случае, если один из силовых приводов будет неисправным, другой силовой привод используется для перемещения подвижной поверхности, которая управляет полетом, при этом пилотирование самолета является устойчивым. Тем не менее, такая избыточность создает значительные препятствия, связанные с интегрированием силовых приводов в структуру самолета (вес, укладка кабеля, …), а предоставляет лишь некоторую дополнительную безопасность.
Также часто обращаются к силовым приводам, включающим в себя два или даже три двигателя (чтобы гарантировать резервирование их обмоток) с соответствующим количеством модулей управления (чтобы гарантировать резервирование электроники) и с одним мостовым измерителем мощности на двигатель.
Задачей изобретения является обеспечение средств для улучшения доступности таких силовых приводов.
Для этой цели изобретение обеспечивает силовой привод, содержащий по меньшей мере один многофазный двигатель, имеющий фазы, обращенные к ротору, закрепленному на внешнем валу, взаимодействующему с тормозным элементом и снабженному средствами для его соединения с подвижным элементом, приводимым в движение, при этом двигатели и тормозной элемент соединены по меньшей мере с одним блоком управления двигателем для управления двигателями посредством подачи электропитания на фазы. Двигатель имеет по меньшей мере четыре фазы, намотанные таким образом, чтобы избежать нейтральной точки, а блок управления имеет по одному однофазному инвертеру на фазу и выполнен таким образом, чтобы реализовывать номинальный режим управления по всем фазам, а также пониженный режим управления, который позволяет приводить ротор во вращение посредством подачи электропитания на две неколлинеарные фазы.
Таким образом, силовой привод имеет нормальный режим, в котором этот силовой привод работает по меньшей мере на трех фазах, и пониженный режим управления, в котором силовой привод работает на двух фазах. Пониженный режим реализуется в том случае, когда к другим фазам больше не может подаваться электропитание, например в результате разомкнутой цепи или короткого замыкания на фазах или цепях для их электропитания. Увеличение количества фаз вокруг общего ротора и использование одного силового моста на каждую фазу увеличивает варианты выбора для обеспечения достаточного количества фаз, доступных для продолжения приведения в действие ротора, но без чрезмерного увеличения количества двигателей. Таким образом, операционные возможности силового привода расширяются, в то же время поддерживаются размер и вес на приемлемом уровне.
Модуль управления предпочтительно имеет множество модулей управления, присоединенных к различным фазам.
Пониженный режим может также применяться в том случае, когда к фазам не может поступать электропитание в результате неисправности модуля управления для подачи к фазам электропитания.
Другие характеристики и преимущества изобретения будут понятными после прочтения последующего описания и, в частности, неограничивающих вариантов осуществления изобретения.
На сопроводительных чертежах показано следующее:
фиг. 1 - схематическое изображение, показывающее общий принцип работы силового привода, в соответствии с изобретением;
фиг. 2 - схематический разрез двигателя силового привода в первом варианте осуществления изобретения;
фиг. 3 - электрическая принципиальная схема для силового привода, показанного на фиг. 2;
фиг. 4 - схематический разрез двигателя силового привода во втором варианте осуществления изобретения;
фиг. 5 - электрическая принципиальная схема для силового привода, показанного на фиг. 4;
фиг. 6 - схематический разрез двигателя в варианте осуществления изобретения.
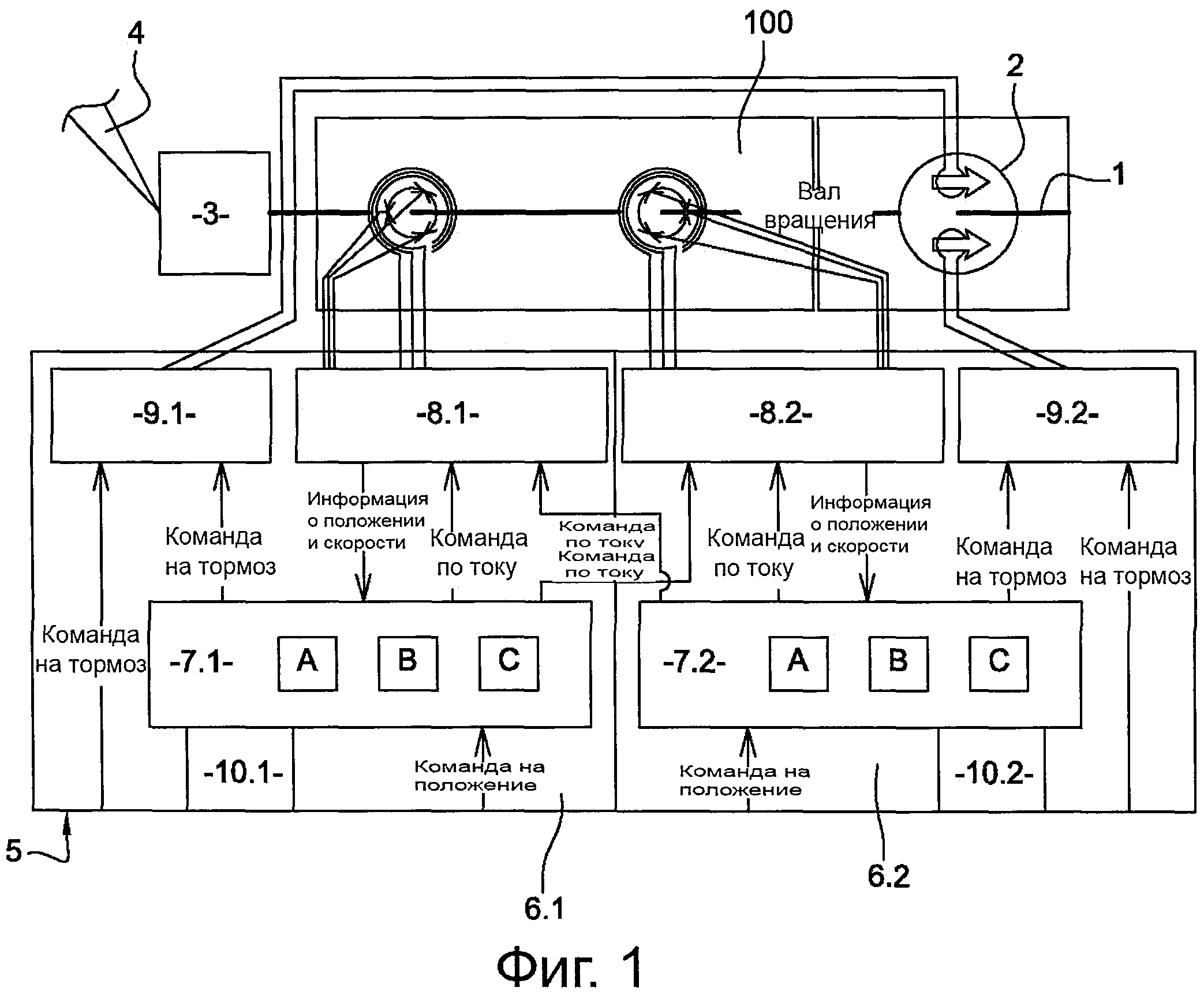
Как показано на фиг. 1, силовой привод, в соответствии с изобретением, содержит многофазный двигатель 100, имеющий обращенный к фазам ротор, прикрепленный к выходному валу 1. В этом примере двигатель 100 является двигателем бесщеточного типа с фазами, намотанными таким образом, чтобы избежать нейтральной точки или точки "звезды". Выходной вал 1 взаимодействует с тормозным элементом или тормозом 2, который сам по себе известен, а также снабжен средствами 3 для соединения с подвижным элементом 4, который должен приводиться в движение. Например, соединительные средства содержат систему передачи движения, такую как система винт и гайка, или систему коленчатого рычага и соединительной тяги, и например, подвижный элемент может быть подвижной поверхностью, предназначенной для управления полетом, в варианте использования в самолете.
Двигатель 100 и тормозной элемент 2 соединены по меньшей мере с одним блоком управления, обозначенным общей ссылочной позицией 5, который выполнен таким образом, чтобы электропитание подавалось в зависимости от команд, принимаемых от центрального модуля управления пилотированием самолета. Блок управления 5 управляет двигателем путем подачи электропитания на его фазы.
Блок управления 5 содержит два идентичных подмодуля 6.1 и 6.2, каждый из которых включает модуль 7.1 или 7.2 управления, силовой модуль 8.1 или 8.2 двигателя, соответственно соединенный с двумя группами фаз двигателя 100, силовой модуль 9.1 или 9.2 для подачи электропитания к тормозу 2, причем модуль соединен с соленоидом тормоза 2, и преобразователь 10.1 или 10.2 мощности, предназначенный для подачи электропитания к модулям 7.1 или 7.2 управления. Линия подачи электропитания соединена с силовыми модулями 8.1, 9.1, 8.2, и 9.2 напрямую.
Каждый модуль 7.1 или 7.2 управления выполнен таким образом, чтобы:
- собирать информацию, поступающую от двигателя (скорость, положение, ток, …) и от центрального модуля управления пилотированием (команды положения для подвижного элемента, команды для торможения, …); и
- использовать вышеуказанную информацию для работы следящих систем A, B, C управления, соответственно, для управления скоростью, положением и током, таким образом обеспечивая управление силовым модулем 8.1 или 8.2 двигателя и силовым модулем 9.1 или 9.2 тормоза.
Для этих целей модуль 7.1 или 7.2 управления соединен со средствами определения скорости и положения подвижного элемента, который должен перемещаться, а также со средствами измерения тока, протекающего в фазах силового привода. Таким образом, датчики положения содержат, в частности, два датчика положения на соответствующих сторонах двигателя, в этом примере два набора датчиков на эффекте Холла. Каждый из модулей управления соединен с одним из этих наборов, и они расположены таким образом, чтобы взаимодействовать между собой с целью обнаружения неисправного датчика, чтобы избежать обработки сигналов, приходящих от неисправных датчиков.
Каждый из модулей 7.1 или 7.2 управления соединен с обоими силовыми модулями 8.1 или 8.2 двигателя, чтобы можно было управлять обоими модулями. Таким образом, каждый из модулей 7.1 или 7.2 управления может управлять обеими группами фаз на случай, если другой модуль управления окажется неисправным. При нормальной работе так называемый "ведущий" модуль из модулей 7.1 или 7.2 управления имеет приоритет над другим модулем, называемым "подчиненным".
Блок 5 управления выполнен таким образом, чтобы реализовывать пониженный режим управления, который предназначен для привода ротора во вращение при подаче электропитания по меньшей мере на две неколлинеарные фазы из всех фаз.
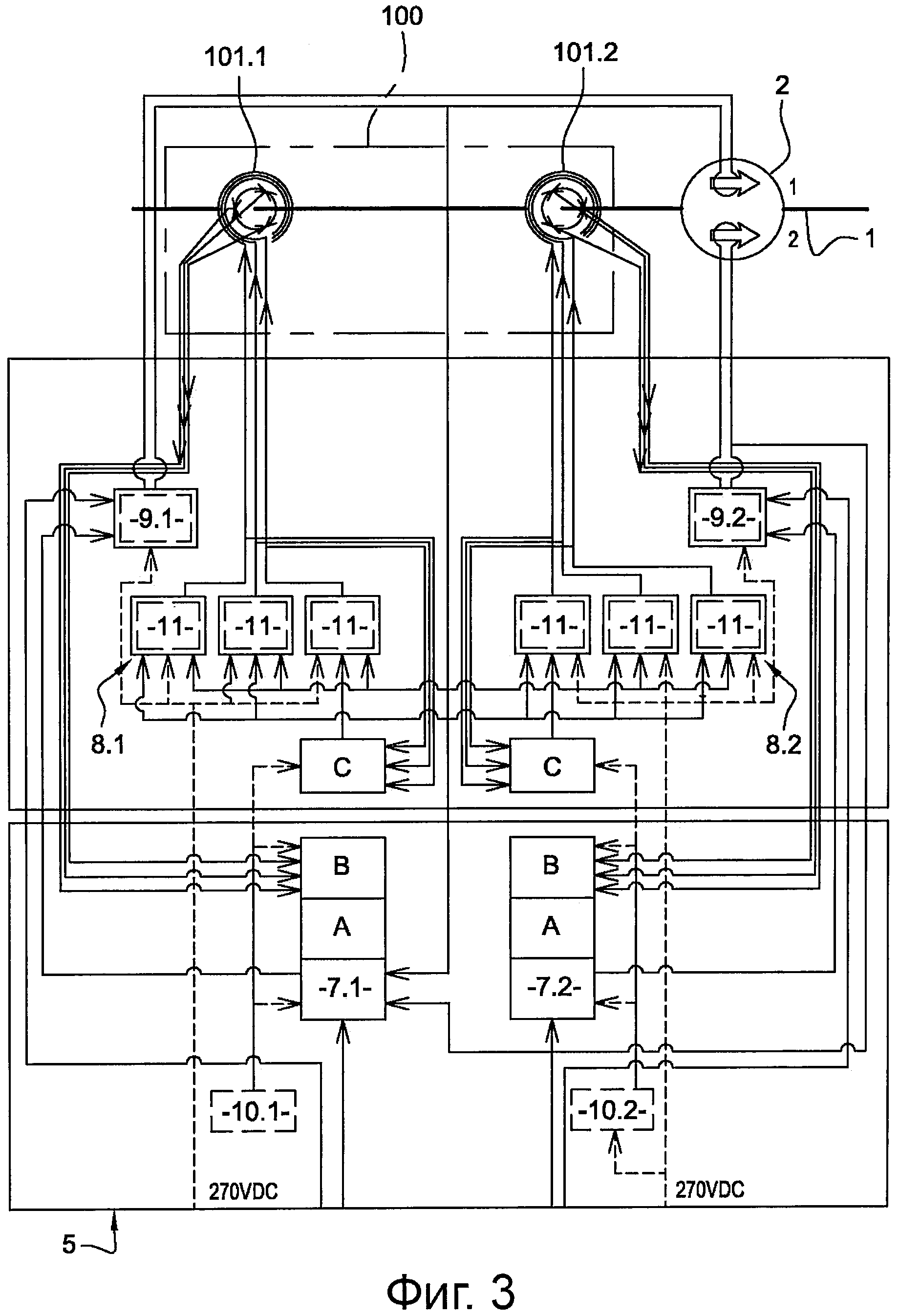
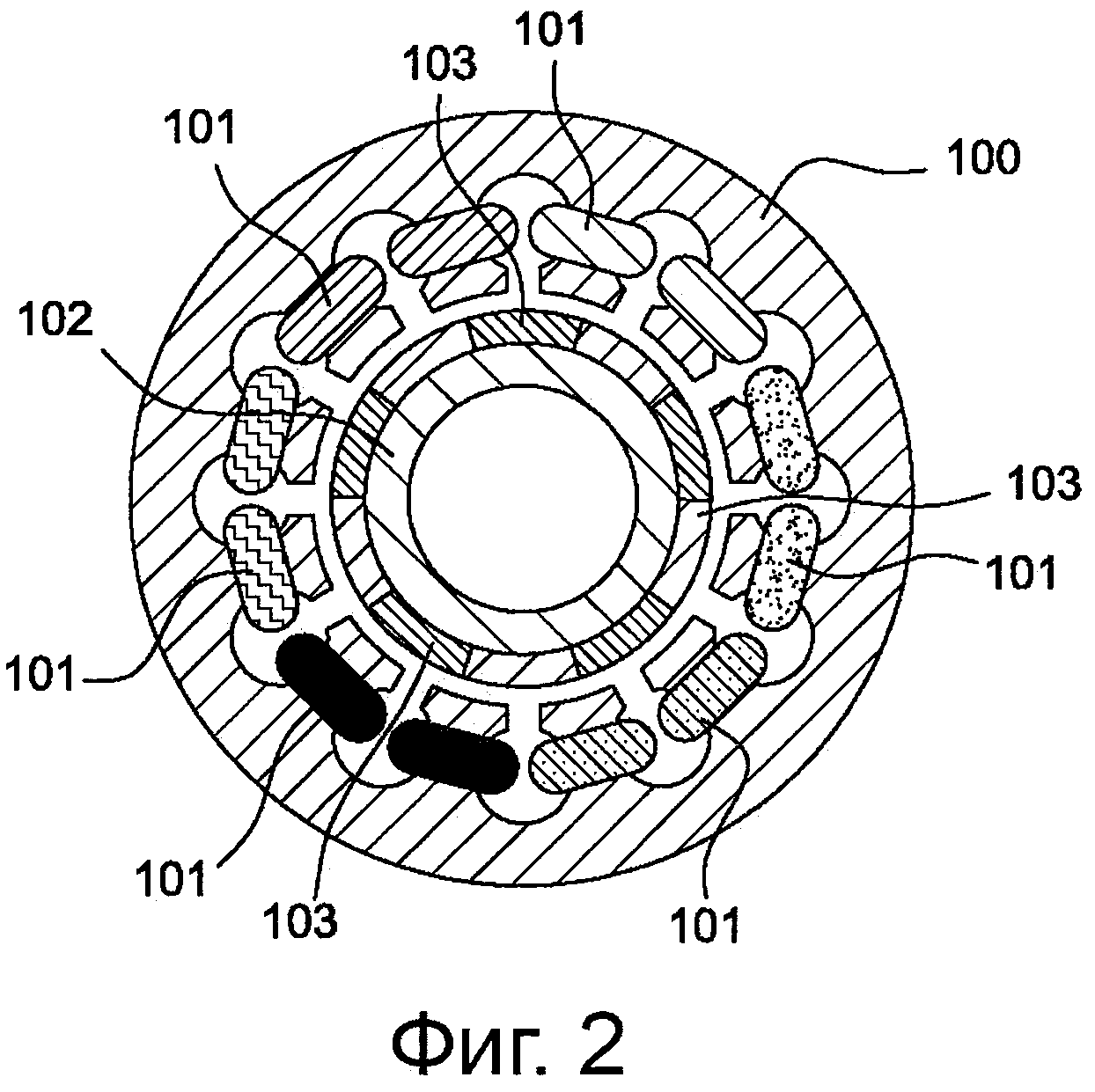
Как показано на фиг. 2 и 3, в первом варианте осуществления изобретения двигатель 100 имеет шесть фаз, которые разделены на две группы 101.1 и 101.2 по три фазы в каждой группе, и общий ротор 102, имеющий постоянные магниты 103.
Каждая фаза 101 группы 101.1 или 101.2 соединена с инвертером 11 соответствующего силового модуля 8.1 или 8.2. Инвертеры 11 соединены по однофазной мостовой схеме. Таким образом, инвертеров 11 столько же, сколько фаз 101, причем каждый силовой модуль 8.1 или 8.2 имеет три инвертера 11.
Блок 5 управления выполнен таким образом, чтобы реализовать номинальный режим управления, в котором блок 5 управления управляет по меньшей мере тремя или предпочтительно шестью фазами 101 двигателя 100 традиционным способом, и пониженный режим управления, в котором блок 5 управления управляет двумя неколлинеарными фазами 101 двигателя 100.
Следует отметить, что номинальный режим может поддерживаться даже в случае неисправности трех фаз, поскольку остаются три фазы, которыми можно управлять традиционным трехфазным способом.
В пониженном режиме управления блок 5 управления определяет токи I1(t) и I2(t), которые должны подаваться на две остающиеся фазы, когда подается крутящий момент, который является постоянным и независимым от положения ротора 102.
Рассмотрение приводится для геометрической системы координат двигателя {P1,P2,Pi}, которая представляет распределение i фаз в трех измерениях, а также для прямоугольной системы координат {PA,PB}, которая является системой координат для двух фаз, которыми управляют и которые синхронизированы по P1 таким образом, что
PB=P2sinΦgeo,
и
PA=P1+P2cosΦgeo.
Для того чтобы получить постоянный крутящий момент в системе координат {PA,PB}, необходимо подавать токи IA=I0cosθ и IB=I0sinθ, где I0 - амплитуда тока управления, а θ - угол между фазами.
Это дает:
Блок 5 управления подает соответствующие токи в остающиеся фазы 101 двигателя 100.
Переход из номинального режима в пониженный режим управления выполняется автоматически, и в этом примере, под управлением блока 5 управления, который после выполнения самотестирования определяет, когда нет возможности подавать питание на четыре фазы. Самотестирование может выполняться, например, на основе измерений, выполненных с помощью средств определения скорости и положения подвижного элемента, который должен приводиться в движение, и с помощью средств измерения тока, протекающего в фазах. Также возможно обеспечить другие средства обнаружения для выполнения этих тестов на неисправность, и например, средства для определения других электрических параметров силового привода, и/или средства для определения надлежащей работы участков цепей управления, таких как замкнутые системы сервоуправления.
Например:
- в случае серьезной поломки, такой как потеря одной из сетей электроснабжения, модуль управления переконфигурирует силовой привод для функционирования с электропитанием, подаваемым на три фазы из шести фаз;
- в случае простой поломки, такой как короткое замыкание на одной фазе двигателя, модуль управления обеспечивает работу с использованием от пяти из шести фаз; и
- в случае двух поломок (приведенных выше серьезной поломки и простой поломки) модуль управления переконфигурирует силовой привод для работы с использованием двух из шести фаз.
Таким образом, в случае неисправностей силовой привод переконфигурируется в режиме реального времени.
Следует отметить, что эта структура силового привода также обеспечивает:
- избыточность привода (две группы фаз с их собственными модулями управления и детекторами);
- избыточность электропитания (для управления и привода);
- избыточность средств торможения (два соленоида тормоза 2); и
- избыточность сети электроснабжения.
В последующем описании второй вариант осуществления изобретения приводится со ссылками на фиг. 4 и 5, при этом элементы, идентичные или аналогичные тем, которые описаны выше, имеют те же цифровые позиции.
Силовой привод во втором варианте осуществления изобретения в целом идентичен по структуре и работе силовому приводу по первому варианту осуществления изобретения.
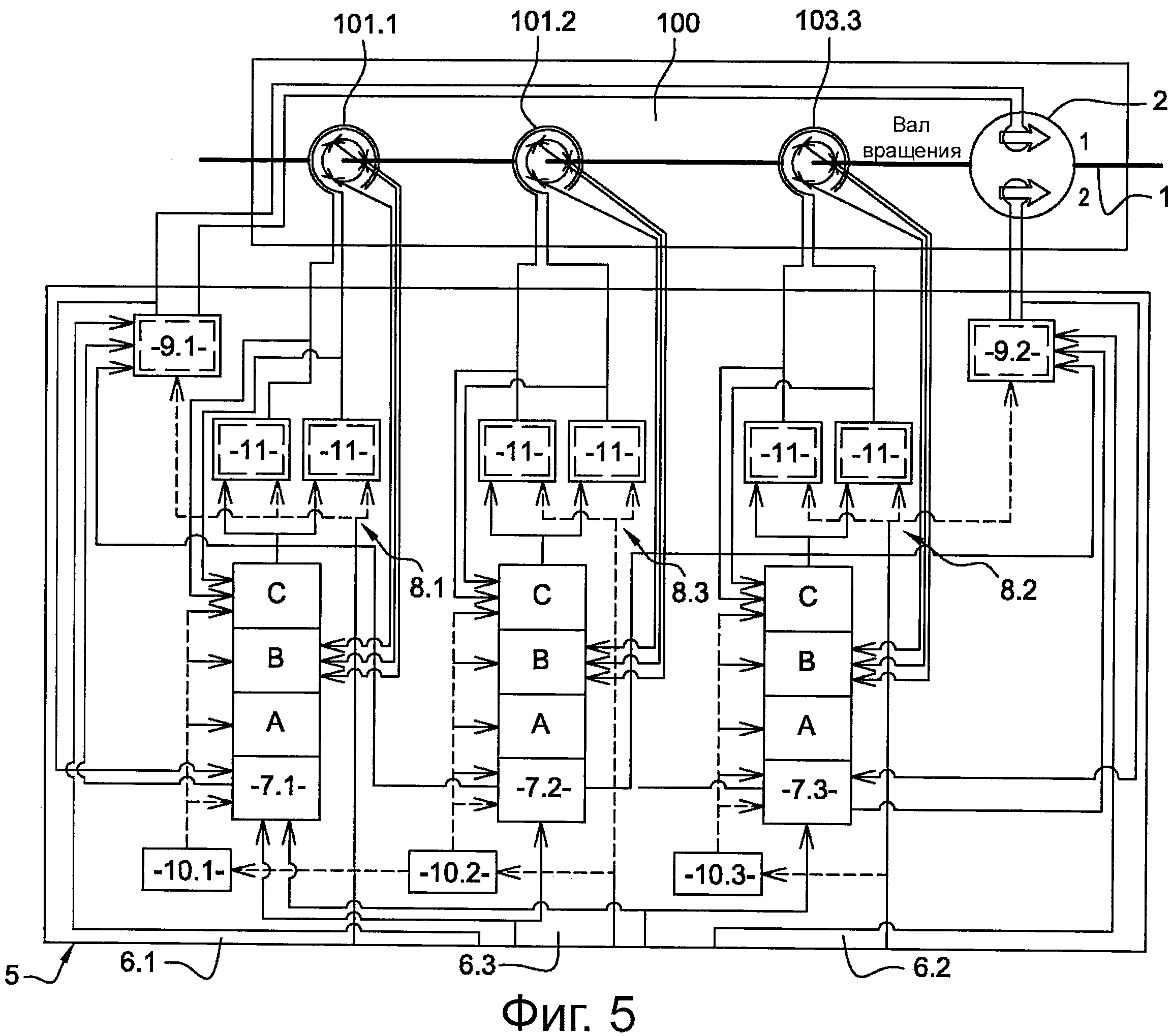
Тем не менее, во втором варианте осуществления изобретения главный двигатель 100 имеет статор с шестью полюсами, каждый из которых имеет три обмотки 104.1, 104.2, и 104.3, выполненные на них, и общий ротор 102, имеющий магниты 103. В этом варианте осуществления изобретения фазы распределены в три группы, каждая по две фазы.
Блок 5 управления содержит три модуля 7.1, 7.2 и 7.3 управления и три силовых модуля 8.1, 8.2 и 8.3. Каждая обмотка 104.1, 104.2, и 104.3 соединена с соответствующим инвертером 11 силового модуля 8.1, 8.2 или 8.3. Каждый инвертер 11 имеет однофазную мостовую схему. Поэтому инвертеров 11 столько же, сколько фаз 101, при этом каждый силовой модуль 8.1, 8.2 и 8.3 имеет по два инвертера 11. В этом варианте осуществления изобретения следует отметить, что только подмодули 6.1 и 6.2 включают соответствующий модуль 9.1, 9.2 для подачи электропитания к тормозу.
Как указывалось выше, блок 5 управления выполнен таким образом, чтобы реализовать номинальный режим управления, в котором блок 5 управления управляет по меньшей мере тремя фазами двигателя 100 традиционным способом, и пониженный режим управления, в котором блок 5 управления управляет двумя неколлинеарными фазами 101 двигателя 100.
В варианте, показанном на фиг. 6, ротор 102 выполнен таким образом, чтобы представлять магнитное сопротивление, которое изменяется по окружности. Это переменное магнитное сопротивление получается за счет формы поперечного сечения ротора, который в этом примере выполнен по существу в форме креста.
Ротор с переменным магнитным сопротивлением позволяет избежать появления противодействующей силы, которая действует на ротор из постоянного магнита, когда фаза двигателя оказывается короткозамкнутой.
Конечно, изобретение не ограничивается описанными вариантами осуществления изобретения и охватывает любой вариант, находящийся в объеме изобретения, который определяется формулой изобретения.
В частности, изобретение применимо как для синхронных двигателей, так и для асинхронных двигателей.
Две группы фаз могут быть смещены по оси вдоль вала двигателя, или они могут быть даже установлены на двух отдельных статорах.
По меньшей мере, некоторые фазы могут быть намотаны с использованием проводов, имеющих отличающиеся свойства по электропроводимости. Это дает возможность избежать наличия нейтральной точки.
Вышеописанные варианты осуществления изобретения могут комбинироваться по выбору.
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства

