Результат интеллектуальной деятельности: МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР
Вид РИД
Изобретение
Изобретение относится к измерительной технике, а именно к измерительным элементам линейного ускорения, и может быть использовано для одновременного измерения ускорений вдоль трех взаимно перпендикулярных осей.
Известен микромеханический акселерометр [Распопов В.Я. Микромеханические приборы: учебное пособие. - М.: Машиностроение, 2002, с. 26, рис. 1.20], содержащий подложку (основание) из диэлектрического материала, четыре опорных элемента (анкера), расположенные с противоположных сторон и закрепленные неподвижно на подложке, инерционную массу, выполненную в виде прямоугольной пластины, расположенную с зазором относительно подложки и связанную с опорными элементами через четыре упругих элемента подвеса, расположенных по краям инерционной массы, емкостной измеритель перемещений, образованный гребневыми структурами электродов, из которых подвижные электроды образуют единую структуру с инерционной массой, а неподвижные электроды жестко закреплены к подложке.
Недостатком конструкции этого микромеханического акселерометра является невозможность одновременного измерения ускорений вдоль трех взаимно перпендикулярных осей X, Y, Z.
Известен микромеханический акселерометр [US 6199874 B1, МПК 7 B60G17/00, опубл. 13.03.2001], в котором инерционная масса смонтирована параллельно и на некотором расстоянии от основания (корпуса) с помощью двух пар упругих элементов подвеса и анкеров. Емкостный измеритель перемещений образован гребенчатыми структурами электродов, из которых подвижные электроды образуют единую структуру с инерционной массой, а неподвижные электроды, объединенные рамкой, скреплены с основанием.
Недостатком конструкции этого микромеханического акселерометра является невозможность одновременного измерения ускорений вдоль трех взаимно перпендикулярных осей X, Y, Z.
Известен интегральный микромеханический гироскоп-акселерометр (RU 2477863 C1, МПК G01P15/125 (2006.01), опубл. 20.03.2013), выбранный в качестве прототипа, содержащий полупроводниковую подложку, на которой расположены десять опор и четыре неподвижных электрода датчика перемещения. Эти опоры и неподвижные электроды выполнены из полупроводникового материала и расположены непосредственно на полупроводниковой подложке.
Инерционная масса, два торсиона, соединяющих внутреннюю раму с опорами, два торсиона, соединяющих инерционную массу с внутренней рамой, четыре подвижных электрода, шестнадцать упругих балок и внутренняя рама расположены с зазором относительно полупроводниковой подложки и выполнены из полупроводникового материала.
Подвижные и неподвижные электроды датчика перемещения выполнены с гребенчатыми структурами с одной стороны, причем подвижные электроды выполнены с возможностью электростатического взаимодействия с неподвижными электродами в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенки электродов, образуя при этом емкостной датчик перемещения внутренней рамы относительно полупроводниковой подложки и емкостной датчик перемещения инерционной массы относительно полупроводниковой подложки.
Интегральный микромеханический гироскоп-акселерометр позволяет измерять величины угловой скорости вдоль оси Z, направленной перпендикулярно плоскости полупроводниковой подложки, и ускорения вдоль осей X, Y, расположенных в плоскости полупроводниковой подложки гироскопа-акселерометра.
Недостатком конструкции этого интегрального микромеханического гироскопа-акселерометра является невозможность одновременного измерения ускорений вдоль трех взаимно перпендикулярных осей X, Y, Z.
Задачей предлагаемого изобретения является создание микромеханического акселерометра, позволяющего проводить одновременное измерение ускорений вдоль трех взаимно перпендикулярных осей X, Y, Z.
Поставленная задача достигается за счет того, что микромеханический акселерометр, так же как в прототипе, содержит подложку, на которой закреплены четыре неподвижных электрода датчика перемещения, выполненных из полупроводникового материала, при этом инерционная масса, внутренняя рама, два торсиона, соединяющих инерционную массу с внутренней рамой, четыре подвижных электрода выполнены из полупроводникового материала и расположены с зазором относительно подложки, причем четыре подвижных электрода датчика перемещения выполнены с гребенчатыми структурами с одной стороны и образуют конденсаторы с четырьмя неподвижными электродами с гребенчатыми структурами с одной стороны в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенки электродов, образуя при этом емкостной датчик перемещения внутренней рамы относительно подложки и емкостной датчик перемещения инерционной массы относительно подложки.
Согласно изобретению два подвижных электрода датчика перемещения закреплены на инерционной массе, которая закреплена во внутренней раме с помощью двух дополнительных торсионов, которые жестко прикреплены одними концами к инерционной массе, а другими к внутренней раме, на которой закреплены два подвижных электрода датчика перемещения. Внутренняя рама закреплена во внешней раме с помощью четырех торсионов, которые жестко прикреплены одними концами к внутренней раме, а другими к внешней раме, на которой закреплены два дополнительных подвижных электрода датчика перемещения. Внешняя рама закреплена в корпусе с помощью торсионов, которые жестко прикреплены одними концами к внешней раме, а другими к корпусу, который закреплен на подложке, на которой закреплены два дополнительных неподвижных электрода датчика перемещения, которые образуют конденсаторы с двумя дополнительными подвижными электродами в плоскости их пластин, образуя при этом емкостной датчик перемещения внешней рамы относительно подложки. Внешняя рама, два дополнительных торсиона, закрепляющих инерционную массу во внутренней раме, четыре торсиона, соединяющих внутреннюю раму с внешней рамой, четыре торсиона, соединяющих внешнюю раму и корпус, два дополнительных подвижных электрода датчика перемещения расположены с зазором относительно подложки. Внешняя рама, корпус, два дополнительных торсиона, закрепляющих инерционную массу во внутренней раме, четыре торсиона, соединяющих внутреннюю раму с внешней рамой, четыре торсиона, соединяющих внешнюю раму и корпус, два дополнительных подвижных электрода датчика перемещения, два дополнительных неподвижных электрода датчика перемещения выполнены из монокристаллического кремния, а подложка выполнена из диэлектрического материала.
Предложенное расположение подвижных электродов датчика перемещения на внутренней раме и инерционной массе, введение дополнительной внешней рамы, закрепленной на подложке через систему, состоящую из торсионов и корпуса, позволяет установить на внешней раме два дополнительных подвижных электрода датчика перемещения, которые образуют конденсаторы с двумя дополнительными неподвижными электродами датчика перемещения, установленными на подложке, образуя при этом емкостной датчик перемещения внешней рамы относительно подложки, а также введение двух дополнительных торсионов, соединяющих инерционную массу с внутренней рамой, позволяет инерционной массе совершать колебания вдоль оси Х, что обеспечивает возможность проведения одновременного измерения ускорений вдоль трех взаимно перпендикулярных осей X, Y, Z.
На фиг. 1 представлена структура предлагаемого микромеханического акселерометра.
Микромеханический акселерометр содержит инерционную массу 1, которая закреплена во внутренней раме 2 с помощью торсионов 3, 4, 5, 6. Торсионы 3, 4, 5, 6 жестко прикреплены одними концами к внутренней раме 2, а другими - к инерционной массе 1. Торсионы 3, 4, 5, 6 размещены в микромеханическом акселерометре с возможностью совершения поступательных колебаний инерционной массы 1 вдоль оси Х, за счет геометрических размеров торсионов 3, 4, 5, 6.
На инерционной массе 1 закреплены подвижные электроды 7, 8 датчика перемещения, выполненные с гребенчатыми структурами с одной стороны.
На внутренней раме 2 закреплены подвижные электроды 9, 10 датчика перемещения, выполненные с гребенчатыми структурами с одной стороны.
Внутренняя рама 2 закреплена во внешней раме 11 с помощью торсионов 12, 13, 14, 15, которые жестко прикреплены одними концами к внутренней раме 2, а другими - к внешней раме 11. Торсионы 12, 13, 14, 15 размещены в микромеханическом акселерометре с возможностью совершения поступательных колебаний внутренней рамы 2 вдоль оси Y, за счет геометрических размеров торсионов 12, 13, 14, 15.
Внешняя рама 11 закреплена в корпусе 16 с помощью торсионов 17, 18, 19, 20, которые жестко прикреплены одними концами к внешней раме 11, а другими к корпусу 16. Торсионы 17, 18, 19, 20 размещены в микромеханическом акселерометре с возможностью совершения поступательных колебаний внешней рамы 11 вдоль оси Z, за счет геометрических размеров торсионов 17, 18, 19, 20.
На внешней раме закреплены подвижные электроды 21, 22 датчика перемещения.
Корпус 16 закреплен на подложке 23, на которой закреплены неподвижные электроды 24, 25 датчика перемещения, выполненные с гребенчатыми структурами с одной стороны. Неподвижные электроды 24, 25 образуют конденсаторы с подвижными электродами 7, 8, в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенки электродов, образуя при этом емкостной датчик перемещения инерционной массы 1 относительно подложки 23.
На подложке 23 закреплены неподвижные электроды 26, 27 датчика перемещения, выполненные с гребенчатыми структурами с одной стороны. Неподвижные электроды 26, 27 образуют конденсаторы с подвижными электродами 9, 10 в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенки электродов, образуя при этом емкостной датчик перемещения внутренней рамы 2 относительно подложки 23.
На подложке 23 закреплены неподвижные электроды 28, 29 датчика перемещения. Неподвижные электроды 28, 29 образуют конденсаторы с подвижными электродами 21, 22 в плоскости их пластин, образуя при этом емкостной датчик перемещения внешней рамы 11 относительно подложки 23.
Инерционная масса 1, внутренняя рама 2, внешняя рама 11, торсионы 3, 4, 5, 6, 12, 13, 14, 15, 17, 18, 19, 20, подвижные электроды 7, 8, 9, 10, 21, 22 датчиков перемещения расположены с зазором относительно подложки 23.
Инерционная масса 1, внутренняя рама 2, внешняя рама 11, торсионы 3, 4, 5, 6, 12, 13, 14, 15, 17, 18, 19, 20, подвижные электроды 7, 8, 9, 10, 21, 22 датчиков перемещения, неподвижные электроды 24, 25, 26, 27, 28, 29 датчиков перемещения, корпус 16 выполнены из полупроводникового материала, например, из монокристаллического кремния.
Подложка 23 может быть изготовлена из диэлектрика, например из боросиликатного стекла.
Работает устройство следующим образом
При возникновении ускорения подложки 23 вдоль оси Y, под действием сил инерции инерционная масса 1 вместе с подвижными электродами 7, 8 перемещается вдоль оси Y, за счет изгиба торсионов 3, 4, 5, 6. Разность напряжений, генерируемая на емкостных датчиках перемещений, образованных подвижными электродами 7, 8 и неподвижными электродами 24, 25, характеризует величину ускорения, за счет изменения величины площади перекрытия между подвижными электродами 7, 8 и неподвижными электродами 24, 25.
При возникновении ускорения подложки 23 вдоль оси Х, под действием сил инерции внутренняя рама 2 вместе с подвижными электродами 9, 10 перемещается вдоль оси Х, за счет изгиба торсионов 12, 13, 14, 15. Разность напряжений, генерируемая на емкостных датчиках перемещений, образованных подвижными электродами 9, 10 и неподвижными электродами 26, 27, характеризует величину ускорения, за счет изменения величины площади перекрытия между подвижными электродами 9, 10 и неподвижными электродами 26, 27.
При возникновении ускорения подложки 23 вдоль оси Z, под действием сил инерции внешняя рама 11 вместе с подвижными электродами 21,22 перемещается вдоль оси Z, за счет изгиба торсионов 17, 18, 19, 20. Разность напряжений, генерируемая на емкостных датчиках перемещений, образованных подвижными электродами 21, 22 и неподвижными электродами 28, 29, характеризует величину ускорения, за счет изменения величины площади перекрытия между подвижными электродами 21, 22 и неподвижными электродами 28, 29.
Таким образом, предлагаемое устройство представляет собой микромеханический акселерометр, позволяющий одновременно измерять величины ускорений, направленных вдоль осей X, Y, Z.
Микромеханический акселерометр, содержащий подложку, на которой закреплены четыре неподвижных электрода датчика перемещения, выполненных из полупроводникового материала, при этом инерционная масса, внутренняя рама, два торсиона, соединяющих инерционную массу с внутренней рамой, четыре подвижных электрода выполнены из полупроводникового материала и расположены с зазором относительно подложки, причем четыре подвижных электрода датчика перемещения выполнены с гребенчатыми структурами с одной стороны и образуют конденсаторы с четырьмя неподвижными электродами с гребенчатыми структурами с одной стороны в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенки электродов, образуя при этом емкостной датчик перемещения внутренней рамы относительно подложки и емкостной датчик перемещения инерционной массы относительно подложки, отличающийся тем, что два дополнительных подвижных электрода датчика перемещения закреплены на инерционной массе, которая закреплена во внутренней раме с помощью двух дополнительных торсионов, которые жестко прикреплены одними концами к инерционной массе, а другими - к внутренней раме, на которой закреплены два подвижных электрода датчика перемещения, при этом внутренняя рама закреплена во внешней раме с помощью четырех торсионов, которые жестко прикреплены одними концами к внутренней раме, а другими - к внешней раме, на которой закреплены два подвижных электрода датчика перемещения, при этом внешняя рама закреплена в корпусе с помощью торсионов, которые жестко прикреплены одними концами к внешней раме, а другими - к корпусу, который закреплен на подложке, на которой закреплены два дополнительных неподвижных электрода датчика перемещения, которые образуют конденсаторы с двумя дополнительными подвижными электродами в плоскости их пластин, образуя при этом емкостной датчик перемещения внешней рамы относительно подложки, при этом внешняя рама, два дополнительных торсиона, закрепляющих инерционную массу во внутренней раме, четыре торсиона, соединяющих внутреннюю раму с внешней рамой, четыре торсиона, соединяющих внешнюю раму и корпус, два дополнительных подвижных электрода датчика перемещения расположены с зазором относительно подложки, причем внешняя рама, корпус, два дополнительных торсиона, закрепляющих инерционную массу во внутренней раме, четыре торсиона, соединяющих внутреннюю раму с внешней рамой, четыре торсиона, соединяющих внешнюю раму и корпус, два дополнительных подвижных электрода датчика перемещения, два дополнительных неподвижных электрода датчика перемещения выполнены из монокристаллического кремния, а подложка выполнена из диэлектрического материала.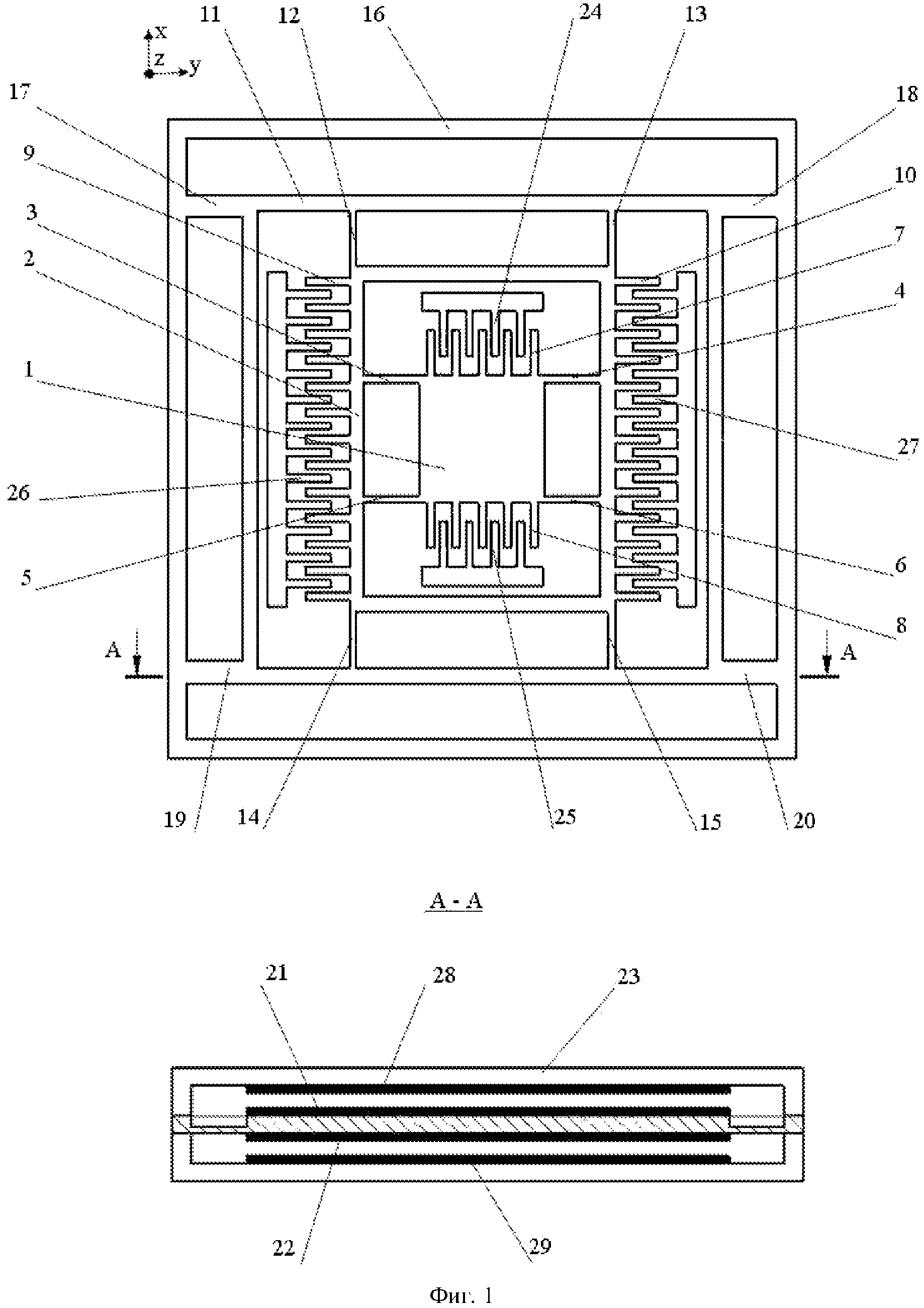
Фильтр тока обратной последовательности
Сверло одностороннего резания с твердосплавным стеблем
Линейный индукционный ускоритель
Способ установления состояния предразрушения конструкционного изделия
Интегральный микромеханический гироскоп
Способ разрушения горных пород
Способ прогнозирования износостойкости твердосплавных режущих инструментов
Способ определения рения (vii) в водных растворах методом инверсионной вольтамперометрии по пику селективного электроокисления меди из интерметаллического соединения recu
Способ определения суммарной антиоксидантной активности экстрактов чаев методом вольтамперометрии на модифицированном электроде
Способ определения скорости гравитационного оседания частиц летучей золы выбросов промышленных предприятий в приземном слое атмосферы
Способ ручной электродуговой сварки плавящимся электродом модулированным током
Способ получения материала, содержащего гексаборид лантана и диборид титана
Способ прогнозирования износостойкости твердосплавных режущих инструментов
Способ определения коэффициента вертикальной диффузии выбросов промышленных предприятий в приземном слое атмосферы
Устройство формирования нано и субнаносекундных свч импульсов

