Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ КОЭФФИЦИЕНТОВ C И С НА ОСНОВЕ ОПРЕДЕЛЕНИЯ СУММАРНОЙ ТЯГИ ДВИГАТЕЛЬНОЙ УСТАНОВКИ ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Область техники.
Изобретение относится к области летных испытаний авиационной техники, а именно к определению аэродинамических коэффициентов Сх и Су летательного аппарата на базе использования методики предварительного определения суммарной тяги двигательной установки (ДУ) по результатам летных испытаний (ЛИ) летательного аппарата (ЛА).
Уровень техники.
Аэродинамические коэффициенты Сх, Су и сила тяги ДУ являются важнейшими характеристиками ЛА. В натурных условиях (летных испытаниях) ЛА могут быть получены наиболее достоверные значения указанных параметров. Поэтому решение поставленной задачи имеет важное значение, в особенности при полете на большой скорости и высоте.
В целях определения аэродинамических характеристик ЛА предварительно рассматривается задача идентификации суммарной тяги ДУ. При этом возникает проблема разделения суммарной тяги двигателей и лобового сопротивления из-за плохой обусловленности задачи и существенной их линейной зависимости. Это следует из уравнения движения ЛА в продольной плоскости:

P, Q - сила тяги и лобового сопротивления;
m, G - масса и вес ЛА; могут быть достаточно точно вычислены с учетом расхода топлива;
α, φ - угол атаки и поворота вектора силы тяги в продольной плоскости;
θ - траекторный угол;
V - относительная скорость ЛА.
Решению этой задачи посвящен ряд работ. В них можно выделить два основных направления: так называемый «физический» принцип разделения сил на основе специально организованных экспериментов и измерений, в которых, в частности, используется кратковременное выключение двигателя или измерение перегрузок (ускорений) в определенно выбранном направлении, и «математический», в котором на основе использования метода линейных преобразований и множителей Лагранжа производится разделение сил вычислительными методами, что, как выше отмечено, не всегда удается. В частности, при равномерном горизонтальном полете (траекторный угол θ=0), проекция силы тяги Р на скоростную ось уравновесит силу лобового сопротивления Q, но обе эти силы неизвестны. При этом для получения результата используется достаточно много вспомогательных измерений.
Известен «Способ измерения тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) непилотируемой гиперзвуковой летающей лаборатории (ГЛЛ)», патент RU №2242736 от 20 декабря 2004 г.
В данном способе тяга двигателя определяется по приращению продольного ускорения (вдоль оси ох,), создаваемого за счет действия силы тяги в полете. Для определения тяги двигателя производится разделение сил аэродинамического сопротивления вдоль продольной оси ГЛЛ и тяги двигателя. С этой целью производится выключение и включение подачи топлива в камеру сгорания в короткие рядом стоящие промежутки времени t1 и t2, которые не превышают 1 сек. Силу тяги двигателя определяют по формуле:
Rdν=mLL·ωR, где
mLL - масса ГЛЛ,
ωR - ускорение ГЛЛ при действии силы тяги.
Ускорение ГЛЛ вычисляют по формуле:
ωR=(nxt1-nxt2)·g, где
nxt1 и nxt2 - значения продольных перегрузок в моменты времени t1 и t2,
g - ускорение свободного падения.
Существенным недостатком такого способа является необходимость выключения двигателя на короткий промежуток времени, что не всегда допустимо и возможно. Тем более, когда необходимо выключение в нескольких точках траектории. Такая система измерений с одним акселерометром позволяет только разделить силу тяги и лобового сопротивления. Вследствие резких колебаний по углу атаки практически невозможно определить аэродинамический коэффициент Су.
Известен «Способ определения силы тяги ГПВРД по результатам ЛИ его на ГЛЛ», патент RU №2324156 от 10 мая 2008 г.
В этом способе предложен принцип выбора угла установки акселерометра, который будет измерять перегрузку только от силы тяги двигателя, и представлена соответствующая формула. При этом проекция перегрузки от аэродинамической силы на выбранную ось чувствительности равна нулю. К недостаткам способа следует отнести то, что жестко установленный датчик позволяет производить измерения только в заданном направлении, определяемом расчетным аэродинамическим качеством, и при полете ЛА с постоянным углом атаки. В этом способе не предложен метод определения коэффициентов аэродинамических сил.
Общий подход к определению коэффициентов аэродинамических сил (и моментов) по результатам измерений при проведении летных испытаний изложен в работе «Методы исследований на летающих моделях» под общей редакцией д-ра технических наук А.Д. Миронова (в серии «Справочная библиотека авиационного инженера-испытателя). Он включает в себя измерения перегрузок по связанным осям ox1 и oy1, углов атаки, скоростного напора, составляющих тяги PX, PY, частоты вращения ротора двигателя и др. параметров.
Существенным недостатком такого подхода является то, что метод определения тяги двигателя и коэффициентов аэродинамических сил базируется практически не на результатах измерений в летных испытаниях, а на аналитических косвенных зависимостях искомых величин от параметров работы систем. В частности, сила тяги определяется по оборотам двигателя и на основании этого результата, не подтвержденного непосредственными конечными измерениями, производится разделение сил. При таком подходе нет контроля ошибок в определении силы тяги и, как следствие, силы лобового сопротивления.
Известен «Способ идентификации аэродинамических характеристик летательного аппарата по результатам испытаний», патент RU №2419775 от 28 декабря 2009 г. Способ относится ко второму ранее указанному направлению, так называемому «математическому» принципу разделения сил, в котором на основе использования метода линейных преобразований и множителей Лагранжа производится разделение сил вычислительными методами. Способ включает проведение комплекса измерений параметров движения в неустановившихся режимах полета ЛА, оценивание параметров математической модели движения ЛА - аэродинамических характеристик на скользящем базовом интервале. Аэродинамические коэффициенты Сх и Су в математической модели задаются в виде линейной функции от угла атаки. Принцип вычисления коэффициентов Сх и Су - найти такие значения коэффициентов аппроксимирующих линейных функций, чтобы получить минимальное значение невязки между правой и левой частями математической модели, полученной при подстановке в уравнения математической модели измеренных в эксперименте значений используемых параметров. При решении используется метод наименьших квадратов.
Основной недостаток этого способа - большой объем измеряемых параметров, необходимых для характеристики модели, а также построение модели по банковским исходным аэродинамическим характеристикам. Иными словами, находим не истинные значения коэффициентов Сх и Cy, а отклонения их от расчетных банковских значении, которые могут быть ошибочными.
Наиболее близким техническим решением, принятым за прототип, является "Способ определения вектора силы тяги гиперзвукового прямоточного воздушно - реактивного двигателя (ГПВРД) с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории (ГЛЛ); патент №2314503 от 18 июля 2004 г. Технический результат при использовании такого способа достигается за счет измерения перегрузки, создаваемой действием силы тяги двигателя в полете в строго определенном направлении, и внешнетраекторных измерений относительной скорости. При определенном повороте измерительной оси акселерометра исключается в его показаниях составляющая от действия суммарных аэродинамических сил и остается составляющая только от силы тяги. При этом дается формула для вычисления угла поворота измерительной оси (оси чувствительности) в зависимости от аэродинамических характеристик ГЛЛ; используются заданные аэродинамические характеристики ГЛЛ, принятые за номинальные. Формула получается из условия равенства нулю проекции вектора полной аэродинамической силы, включающей в себя силу лобового сопротивления Q и подъемную силу Y.
Измеренная относительная скорость используется как вспомогательный параметр для вычисления угла поворота вектора силы тяги, что характерно для двигателя, интегрированного в корпус ЛА. Вопросы определения аэродинамических характеристик в прототипе не рассматривались. При наличии только этих средств измерений невозможно независимо определить силу тяги ДУ и коэффициенты Сх и Cy аэродинамических сил.
Поэтому необходимо использование других характерных параметров и организация такой системы измерений, которая позволит решить поставленную задачу.
Раскрытие изобретения.
Технический результат, на достижение которого направлено изобретение, заключается в повышении точности определения при летных испытаниях ЛА суммарной тяги ДУ и аэродинамических коэффициентов Сх и Су при обработке параметров построенной системы измерений, которая позволяет составить систему независимых уравнений для определения истинных значений тяги и аэродинамических коэффициентов Р,Cx, Cy с использованием итерационных процедур по перегрузке. Для достижения технического результата в предлагаемом способе, включающем выбор направления вспомогательной оси, по которому на летательный аппарат действует перегрузка только от силы тяги при условии равенства нулю проекции вектора полной аэродинамической силы, вычисление угла наклона вспомогательной оси и модуля вектора силы тяги Р двигательной установки по следующим формулам:

nd - перегрузка в направлении вспомогательной оси oxd под углом αd к связанной оси ЛА - ох1, изменяющимся в зависимости от угла атаки и аэродинамических коэффициентов,
αd - угол наклона вспомогательной оси, в направлении которой перегрузка от аэродинамических сил равна нулю,
α, φ - измеренный угол атаки и угол поворота вектора силы тяги относительно оси ох1 в продольной плоскости, положительное направление отсчета угла φ принято по часовой стрелке относительно оси ох1,
G - вес ЛА, который вычисляется с учетом расхода топлива,
К -аэродинамическое качество,
угол наклона αd вспомогательной оси oxd вычисляют непрерывно при изменяющихся аэродинамических коэффициентах и угле атаки. Измеряют перегрузки nx1 и ny1 в направлении осей ox1 и oy1, летательного аппарата. Перегрузку nd вычисляют по измеренным перегрузкам nx1 и ny1, пересчитывая их на направление вспомогательной оси oxd, на котором перегрузка от аэродинамических сил равна нулю и остается только перегрузка от проекции вектора силы тяги на это направление, пересчет начинают от банковских значений Сх, Су. Затем, используя вычисленное значение перегрузки nd и измеренное значение относительной скорости, определяют суммарную тягу двигательной установки и аэродинамический коэффициент Сх. Определяют аэродинамический коэффициент Су, для чего устанавливают акселерометр, ось чувствительности которого жестко связана с корпусом ЛА и направлена перпендикулярно к вектору силы тяги, чтобы исключить в показаниях этого акселерометра составляющую перегрузки от силы тяги и который измеряет проекцию только аэродинамической силы. Такие измерения и пересчет перегрузок дают возможность составить систему независимых уравнений для определения истинных значений тяга Р, аэродинамических коэффициентов Сх и Cy, которая имеет следующий вид:



nx1, ny1, nφ - измеренные значения проекций перегрузки на связанные оси летательного аппарата и на нормаль к вектору силы тяги,
Δnda - отклонение аэродинамической составляющей перегрузки от ее нулевого значения,

Q, Y - сила лобового сопротивления и подъемная сила,
θ - траекторный угол,
перегрузка nd включает составляющую перегрузки nddν от силы тяги и отклонение аэродинамической составляющей перегрузки Δnda от ее нулевого значения вследствие отклонений истинных значений аэродинамических коэффициентов от их банковских значений, определяют аэродинамические коэффициенты Сх и Су по формулам:


q - измеренный скоростной напор,
S - характерная площадь летательного аппарата.
Затем для повышения точности вычислений выполняют итерационные процедуры с добавлением поправок  в формулу (3) на каждом i-ом шаге итераций, где
в формулу (3) на каждом i-ом шаге итераций, где
Qi=CixqiS, Yi=Ciy,qiS, Gi=G0-mct, mc - секундный расход топлива, i=1, 2, … n.
Вычисления продолжаются до достижения требуемой точности (Δnda≈0), при этом условии принимаются конечные истинные значения P, Cx,Cy.
Таким образом, при использовании такого способа достигается технический результат за счет принятой системы измерений, обеспечивающей независимость в измерениях сил тяги Р и аэродинамических сил путем измерения перегрузок по связанным осям ЛА и определения суммарной тяги двигательной установки Р и истинных значений аэродинамических характеристик.
В общем случае для определения неизвестных величин: силы тяги Р, коэффициентов Сх и Су необходимо составить систему трех уравнений. Используется так называемый физический принцип разделения силы тяги и аэродинамических сил (в данном случае лобового сопротивления) с помощью акселерометра. Такая система может быть получена на основании внешнетраекторных измерений относительной скорости полета и перегрузки на определенно выбранном направлении. Может быть использована следующая система уравнений:



Y - подъемная сила ЛА;
nd, nφ - перегрузка под углом αd относительно связанной оси ох1 и по нормали к вектору силы тяги;
Для двигателя с прямым срезом сопла, подвешенного на пилонах или встроенного в фюзеляж, направление вектора силы тяги с большой точностью будет совпадать с направлением оси установки двигателя.
В таком виде система уравнений (9)-(11) не может быть использована, т.к. характеристическая матрица является вырожденной.
С целью упрощения примем φ=0; в итоге получим характеристическую матрицу:

Указанную трудность можно обойти, составив измерительную систему таким образом, чтобы, во-первых, уравнения решались раздельно, а во-вторых - использовать итерационные процедуры с целью уточнения полученных раздельных решений. Для этого используем независимое уравнение для составляющей перегрузки от силы тяги ДУ

с целью предварительного определения силы тяги, а также поправку на величину перегрузки

от аэродинамических сил с учетом действительных значений коэффициентов Cx и Cy.
Таким образом, для определения тяги двигателя при проведении летных испытаний используется так называемый физический принцип разделения сил. Используя заявленный способ разделения силы тяги и аэродинамических сил, можно в конечном итоге определить коэффициенты лобового сопротивления и подъемной силы. Задача может быть решена при условии линейной зависимости уравнений системы, если ее разделить на три автономных уравнения для вычисления каждой неизвестной. Такая система может быть получена при использовании внешнетраекторных измерений скорости полета и измерений перегрузок по связанным осям с пересчетом их на определенно выбранное направление, а также итерационного процесса с использованием коррекций по измеренной перегрузке. Поскольку направление вспомогательной оси может непрерывно изменяться, то невозможно выбрать постоянное значение угла установки акселерометра, чтобы выполнялось указанное условие. Поэтому следует поступить наоборот: показания nx1, ny1 датчиков, оси чувствительности которых ориентированы по связанным осям, пересчитать на заданное направление под углом αd. Разумеется, в результате получим значение перегрузки только от силы тяги. В частном случае, при возможности, может быть использован такой датчик, если выбран режим полета при постоянном угле атаки α и числе М.
Угол αd первоначально вычисляется по априорным банковским характеристикам для выбранных режимов полета. Далее, в процессе использования итерационных процедур при обработке результатов измерений, этот угол будет уточняться по мере уточнения аэродинамических коэффициентов Сх и Су.
Заявляемое решение дает возможность определить в летном эксперименте аэродинамические коэффициенты Сх и Су и силу тяги ДУ не только при полете ЛА с постоянным углом атаки, но и переменным, т.к. не требует измерений перегрузки в жестко заданном фиксированном направлении, не требует при проведении ЛИ организации специальных тестовых маневров разгона и торможения для решения одной из сложных и важных задач - разделения силы тяги и лобового сопротивления. Способ позволяет определять искомые величины как при послеполетной обработке, так и в полете, в реальном масштабе времени, как для пилотируемых ЛА, так и беспилотных.
Предлагаемый способ поясняется чертежами, представленными на фиг.1-3.
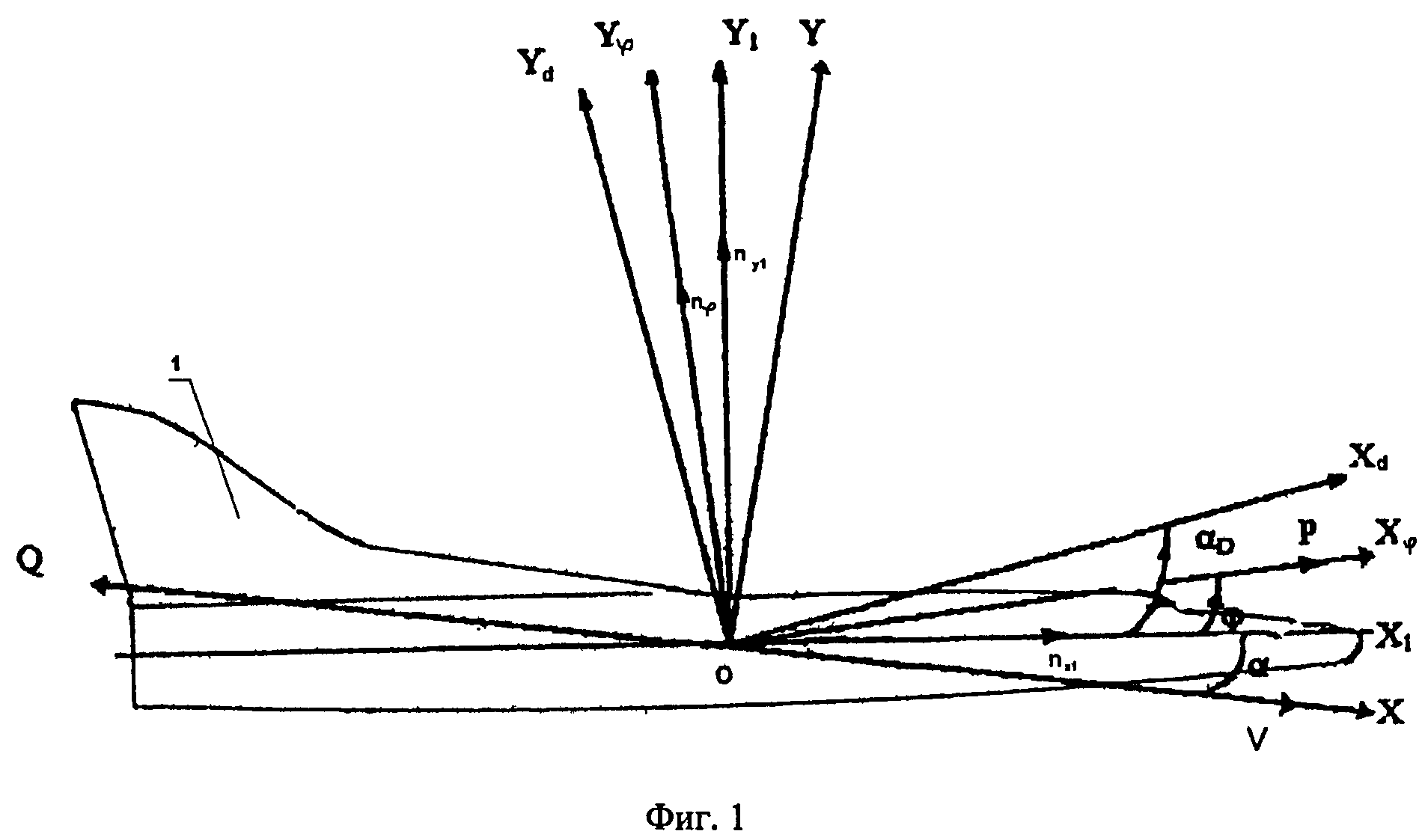
На фиг.1 показана схема ориентации осей, распределение перегрузок и сил на ЛА, где: 1-ЛА,
ox1y1 - связанная система координат,
oxy - скоростная система координат, ось ох повернута на угол атаки α относительно
оси ox1, по осям ox и oy направлены сила лобового сопротивления Q и подъемная сила Y, по оси ох направлен вектор относительной скорости V;
oxdyd - система координат, в которой проекция вектора полной аэродинамической силы на ось oxd равна нулю;
oxφyφ - система координат, в которой проекция вектора силы тяги ДУ на ось оуφ равна нулю;
nx1, ny1, nφ - измеренные значения проекций перегрузки на связанные оси ЛА и на нормаль к вектору силы тяги,
Р - сила тяги ДУ;
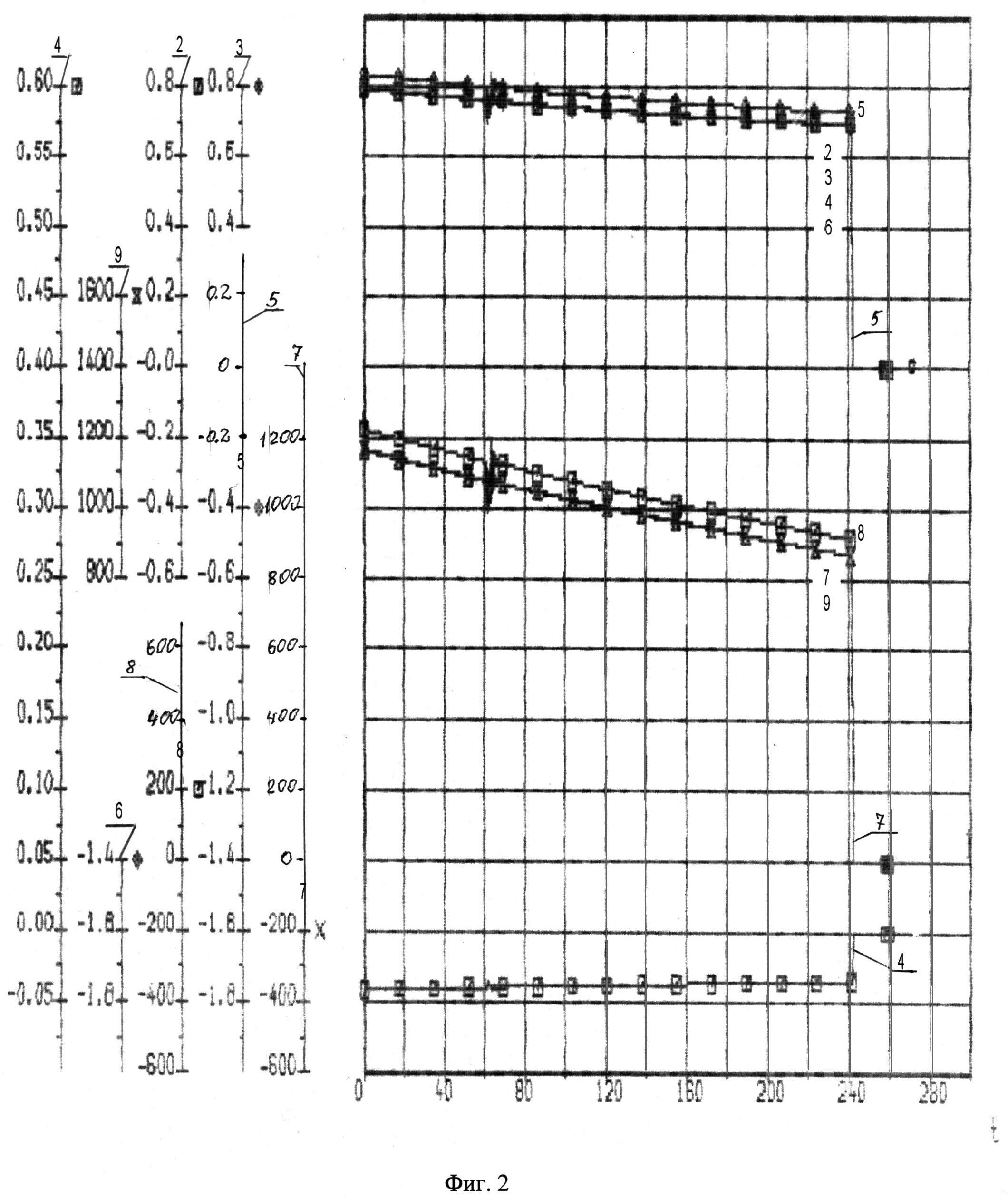
Нафиг.2 показано изменение по времени проекций векторов перегрузок и тяги двигательной установки на различные оси по этапам итераций, где:
2 - nd - перегрузка, вычисленная в направлении вспомогательной оси oxd под углом αd к оси ох1, изменяющимся в зависимости от угла атаки и аэродинамических коэффициентов, 3 - nddν - перегрузка, пересчитанная в направлении вспомогательной оси oxd по измеренным проекциям nx1 и ny1, в нулевом приближении, 4 - Δnida - отклонение аэродинамической составляющей перегрузки от ее нулевого значения (по первой итерации, i=1), 5 - ndв - возмущенное значение перегрузки nd (увеличенное на 5%), 6 - nid - скорректированное значение перегрузки (по первой итерации, i=1), 7 - Р - номинальное значение силы тяги ДУ, 8 - Pdν - сила тяги в нулевом приближении, 9 - Pi - скорректированное значение силы тяги ДУ (по первой итерации, i=1).
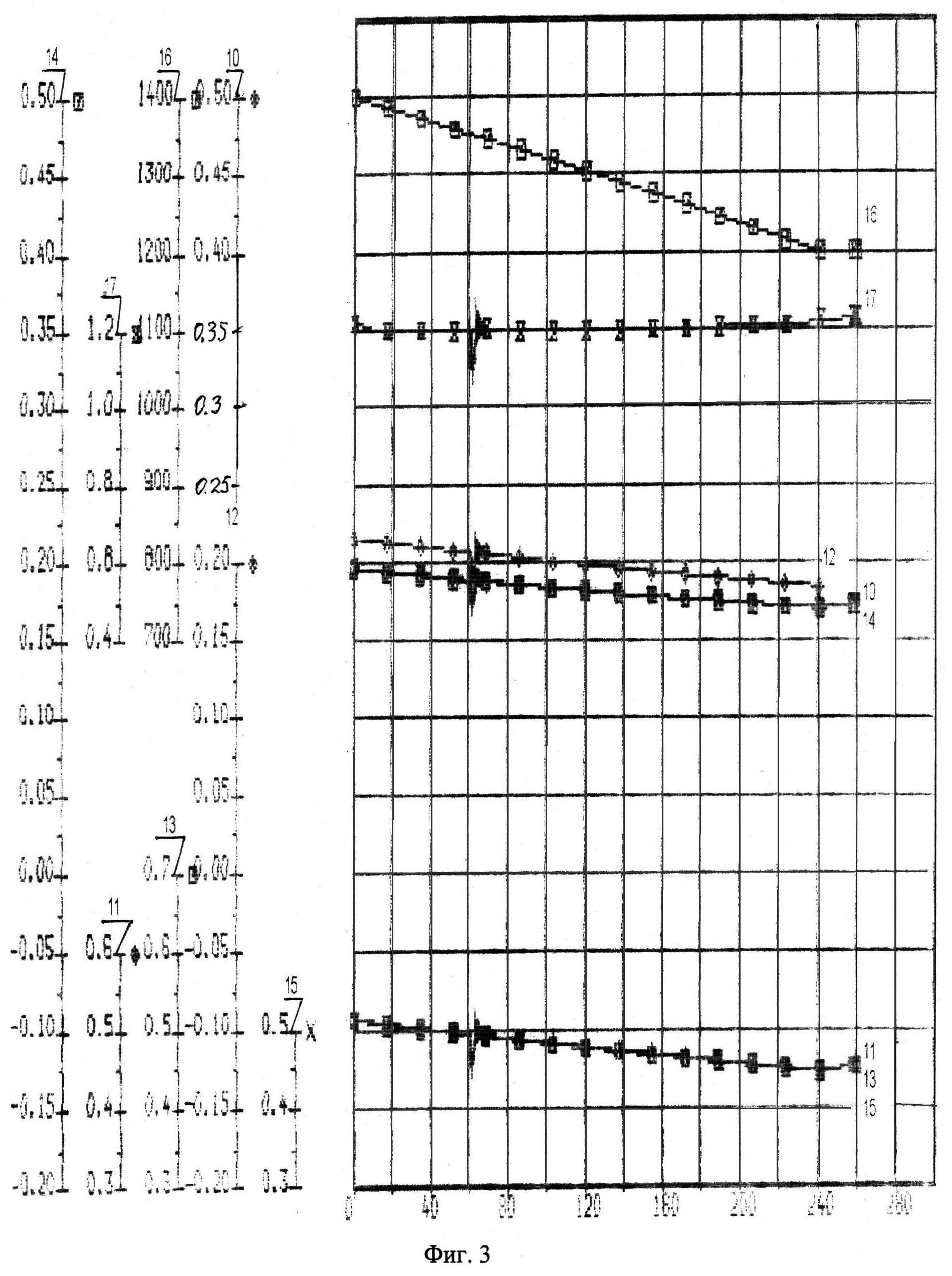
На фиг.3 показано изменение по времени аэродинамических коэффициентов Сх и Cy по этапам итераций, изменение веса ЛА и проекций перегрузки на ось oyφ, где:
10, 11 - Сх, Су - номинальные (из банка аэродинамических характеристик) значения коэффициентов, 12, 13 - С0х, С0у - значения Сх и Су в нулевом приближении, 14, 15 - Cix, Ciy - значения Сх и Су (по первой итерации, i=1), 16 - G - вес ЛА с учетом расхода топлива, 17 - nφ - проекция перегрузки на ось оуφ.
Способ осуществляется следующим образом.
По заданным банковским аэродинамическим коэффициентам Сх и Cy вычисляют угол наклона оси, в направлении которой на ЛА действует перегрузка только от силы тяги при условии равенства нулю проекции вектора полной аэродинамической силы, по формуле: 
Устанавливают акселерометры по связанным осям ох1 и оу1, в полете измеряют перегрузки nx1 и ny1 в направлении связанных осей ох1 и оу1.
Для вычисления модуля вектора силы тяги Р двигательной установки в текущий момент времени используется следующая формула:
nd - перегрузка, вычисленная в направлении вспомогательной оси oxd под углом αd к оси ох1, изменяющимся в зависимости от угла атаки и аэродинамических коэффициентов,
αd - угол наклона вспомогательной оси, в направлении которой перегрузка от аэродинамических сил равна нулю,
α, φ - измеренный угол атаки и угол поворота вектора силы тяги двигателя относительно оси ох1 в продольной плоскости, положительное направление отсчета угла φ принято по часовой стрелке относительно оси ох1,
G - вес ЛА, который вычисляется с учетом расхода топлива,
К - аэродинамическое качество,
Перегрузку nd вычисляют, а не измеряют. Для этого измеренные перегрузки nx1 и ny1 пересчитывают на направление, на котором перегрузка от аэродинамических сил равна нулю и остается только перегрузка от проекции вектора силы тяги на это направление. Пересчет начинают от банковских значений коэффициентов Сх, Су. Затем, используя вычисленное значение перегрузки nd и измеренное значение относительной скорости, предварительно определяют суммарную тягу ДУ и аэродинамический коэффициент Сх.
Для независимого определения аэродинамического коэффициента Су устанавливают акселерометр, ось чувствительности которого жестко связана с корпусом ЛА и направлена перпендикулярно к вектору силы тяги, чтобы исключить в показаниях этого акселерометра составляющую перегрузки от силы тяги, и измеряет проекцию только аэродинамической силы. Такие измерения и пересчет перегрузок дают возможность составить систему независимых уравнений для определения истинных значений тяги Р, аэродинамических коэффициентов Сх и Cy которая имеет следующий вид:
такие измерения и пересчет перегрузок дают возможность составить систему независимых уравнений для определения истинных значений суммарной тяги ДУ и аэродинамических коэффициентов Сх и Су. Система уравнений имеет следующий вид:



nx1, ny1, nφ - измеренные значения проекций перегрузки на связанные оси ЛА и на нормаль к вектору силы тяги,
Δnda - отклонение аэродинамической составляющей перегрузки от ее нулевого значения,

Q, Y - сила лобового сопротивления и подъемная сила,
θ - траекторный угол,
Перегрузка nd включает составляющую nddν от силы тяги и отклонение аэродинамической составляющей перегрузки Δnda от ее нулевого значения вследствие отклонений истинных значений аэродинамических коэффициентов от их банковских значений. Определяют аэродинамические коэффициенты Сх и Су по формулам:


q - измеренный скоростной напор,
S - характерная площадь ЛА.
Затем для повышения точности вычислений выполняют итерационные процедуры с добавлением поправок  в формулу (3) на каждом i-ом шаге итераций, где
в формулу (3) на каждом i-ом шаге итераций, где
Qi=CixqiS, Yi=CiyqiS, Gi=G0-mct, mc - секундный расход топлива, i=1, 2, … n.
Вычисления продолжаются до достижения требуемой точности (Δnda≈0), при этом условии принимаются конечные искомые значения Р, Сх, Су.
На фиг.2 показаны для одной из траекторий управляемого движения изменения по времени значений перегрузок, измеренных и рассчитанные с учетом поправки (формула 6) и соответствующих сил тяги ДУ; принята ошибка в измерении перегрузки в 5%.
Как видно из этих кривых, заданные и расчетные значения силы тяги ДУ практически совпадают после первой итерации.
На фиг.3 показаны соответствующие кривые изменений аэродинамических коэффициентов, веса и перегрузки на ось oyφ.
Как видно из представленных кривых, после первой итерации с коррекцией перегрузки Δn1da искомые аэродинамические коэффициенты близки к номинальным.
С привлечением показаний датчика перегрузки nφ, показания которого не зависят от силы
тяги и ошибки для которого не были заданы, установлено, что отклонение показаний акселерометра обусловлено не отклонением силы тяги от заданного значения, а погрешностью акселерометра. При заданной погрешности акселерометра точность определения искомых параметров (в %) следующая:
|
Таким образом, изложенные принципы разделения силы тяги и аэродинамических сил позволяют при проведении летных испытаний ЛА определять с достаточно высокой точностью аэродинамические коэффициенты Сх и Су на основе определения суммарной тяги ДУ по результатам ЛИ летательного аппарата ЛА, используя при этом измерения перегрузок, относительной скорости, скоростного напора и угла атаки. Они также позволяют уточнить природу отклонений идентифицируемых параметров от расчетных. Для уточнения полученных значений аэродинамических коэффициентов и тяги ДУ следует произвести послеполетное математическое моделирование траекторий полета с привлечением полученных результатов обработки бортовой системы измерений и результатов внешнетраекторных измерений.
Способ определения аэродинамических коэффициентов С и С на основе определения суммарной тяги двигательной установки по результатам летных испытаний летательного аппарата (ЛА), включающий выбор направления вспомогательной оси, по которому на летательный аппарат действует перегрузка только от силы тяги при условии равенства нулю проекции вектора полной аэродинамической силы, вычисление угла наклона вспомогательной оси и модуля вектора силы тяги Р двигательной установки по следующим формулам: где n - перегрузка в направлении вспомогательной оси ox под углом α к связанной оси ЛА - ox, изменяющимся в зависимости от угла атаки и аэродинамических коэффициентов;α - угол наклона вспомогательной оси, в направлении которой перегрузка от аэродинамических сил равна нулю;α, φ - измеренный угол атаки и угол поворота вектора силы тяги относительно оси ox в продольной плоскости, положительное направление отсчета угла φ принято по часовой стрелке относительно оси ox;G - вес ЛА, который вычисляется с учетом расхода топлива;К - аэродинамическое качество,отличающийся тем, что угол наклона α вспомогательной оси ox вычисляют непрерывно при изменяющихся аэродинамических коэффициентах и угле атаки, измеряют перегрузки n и n в направлении осей ох и oy летательного аппарата, перегрузку n вычисляют по измеренным перегрузкам n и n, пересчитывая их на направление вспомогательной оси ox, на котором перегрузка от аэродинамических сил равна нулю и остается только перегрузка от проекции вектора силы тяги на это направление, пересчет начинают от банковских значений аэродинамических коэффициентов С, С, затем, используя вычисленное значение перегрузки n и измеренное значение относительной скорости, определяют суммарную тягу двигательной установки и аэродинамический коэффициент С, определяют аэродинамический коэффициент С, для чего устанавливают акселерометр, ось чувствительности которого жестко связана с корпусом летательного аппарата и направлена перпендикулярно к вектору силы тяги, чтобы исключить в показаниях этого акселерометра составляющую перегрузки от силы тяги, и который измеряет проекцию только аэродинамической силы, такие измерения и пересчет перегрузок дают возможность составить систему независимых уравнений для определения истинных значений тяги Р, аэродинамических коэффициентов C и C, которая имеет вид: где n, n, n - измеренные значения проекций перегрузки на связанные оси летательного аппарата и на нормаль к вектору силы тяги;Δn - отклонение аэродинамической составляющей перегрузки от ее нулевого значения, Q, Y - сила лобового сопротивления и подъемная сила;θ - траекторный угол,перегрузка n включает составляющую перегрузки n от силы тяги и отклонение аэродинамической составляющей перегрузки Δn от ее нулевого значения вследствие отклонений истинных значений аэродинамических коэффициентов от их банковских значений, определяют аэродинамические коэффициенты С и C по формулам: где q - измеренный скоростной напор;S - характерная площадь летательного аппарата,затем для повышения точности вычислений выполняют итерационные процедуры с добавлением поправок в формулу (3) на каждом i-м шаге итераций, гдеQ=CqS, Y=CqS, G=G-mt, m - секундный расход топлива, i=1, 2, … n, вычисления продолжаются до достижения требуемой точности (Δn≈0), при этом условии принимаются конечные истинные значения Р, С, С.







Способ определения и сигнализации о приближении несущего винта к зоне режимов "вихревого кольца" на предпосадочных маневрах одновинтового вертолета
Способ оценки горизонтальных составляющих индуктивных скоростей на малых скоростях полёта одновинтового вертолёта
Экспертная система контроля работы бортового оборудования летательных аппаратов
Полиэргатический тренажерный комплекс предупреждения столкновений летательных аппаратов
Способ формирования модели прогноза образования конденсационных следов (кс) самолетов гражданской авиации (га) с конкретным типом газотурбинного двигателя и конденсационных перистых облаков (кпо) с использованием количественных показателей образования кс и кпо для экологической оптимизации полетов самолетов га на конкретных трассах в различных регионах земли и возможности снижения влияния эмиссии двигателей на парниковый эффект
Система биомеханического контроля деятельности лётчика в полёте
Способ искробезопасной заправки топливных баков летательного аппарата топливом под давлением
Способ уменьшения угла атаки несущего винта на предпосадочных маневрах одновинтового вертолета (варианты)
Интеллектуальная система поддержки экипажа
Многофункциональный комплекс бортовых траекторных измерений
Способ определения и сигнализации о приближении несущего винта к зоне режимов "вихревого кольца" на предпосадочных маневрах одновинтового вертолета
Способ оценки горизонтальных составляющих индуктивных скоростей на малых скоростях полёта одновинтового вертолёта
Экспертная система контроля работы бортового оборудования летательных аппаратов
Полиэргатический тренажерный комплекс предупреждения столкновений летательных аппаратов
Способ формирования модели прогноза образования конденсационных следов (кс) самолетов гражданской авиации (га) с конкретным типом газотурбинного двигателя и конденсационных перистых облаков (кпо) с использованием количественных показателей образования кс и кпо для экологической оптимизации полетов самолетов га на конкретных трассах в различных регионах земли и возможности снижения влияния эмиссии двигателей на парниковый эффект
Система биомеханического контроля деятельности лётчика в полёте
Способ искробезопасной заправки топливных баков летательного аппарата топливом под давлением
Способ уменьшения угла атаки несущего винта на предпосадочных маневрах одновинтового вертолета (варианты)
Интеллектуальная система поддержки экипажа
Многофункциональный комплекс бортовых траекторных измерений

