Результат интеллектуальной деятельности: СПОСОБ СЖАТИЯ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ
Вид РИД
Изобретение
Изобретение относится к области автоматизации исследований и проектирования систем управления движением различными объектами с применением компьютерного моделирования.
Известны способы построения аппаратно-программных комплексов, так называемых SCADA систем, для исследования динамики движения судна (Прохоренков A.M. и др. Разработка исследовательских комплексов судовых систем управления // Труды XXXIV Всероссийской конференции “Управление движением морскими судами и специальными аппаратами”, изд. ИПУ РАН, М., 2007 г., с. 148-156).
Известен также способ автоматизированного проектирования структуры систем управления техническими системами (Патент РФ 2331097, МПК G06F 17/50). Способ состоит в следующем: «Формируют на пульте управления команду на начало проектирования системы управления (СУ) и передают ее на узел формирования структуры СУ, формируют задачи управлениями структуры СУ, оптимизируют элементы состава и структуру СУ по заданному критерию. Затем исследуют режимы функционирования СУ. При несоответствии заданию корректируют структуру СУ и повторяют процесс проектирования…».
Близким к рассмотренному способу проектирования СУ является также способ проектирования с использованием ЦВМ, приведенный в патенте РФ 2294560, МПК G06F 17/50.
Указанные способы проектирования СУ не обладают достаточными функциональными возможностями для полного исследования и проектирования системы управления движением (СУД) корабля в реальном времени.
Наиболее близким данной заявке является способ автоматизации проектирования СУД корабля (патент РФ 2423286, МПК B63H 25/00, принятый в качестве прототипа). Способ использует два модуля:
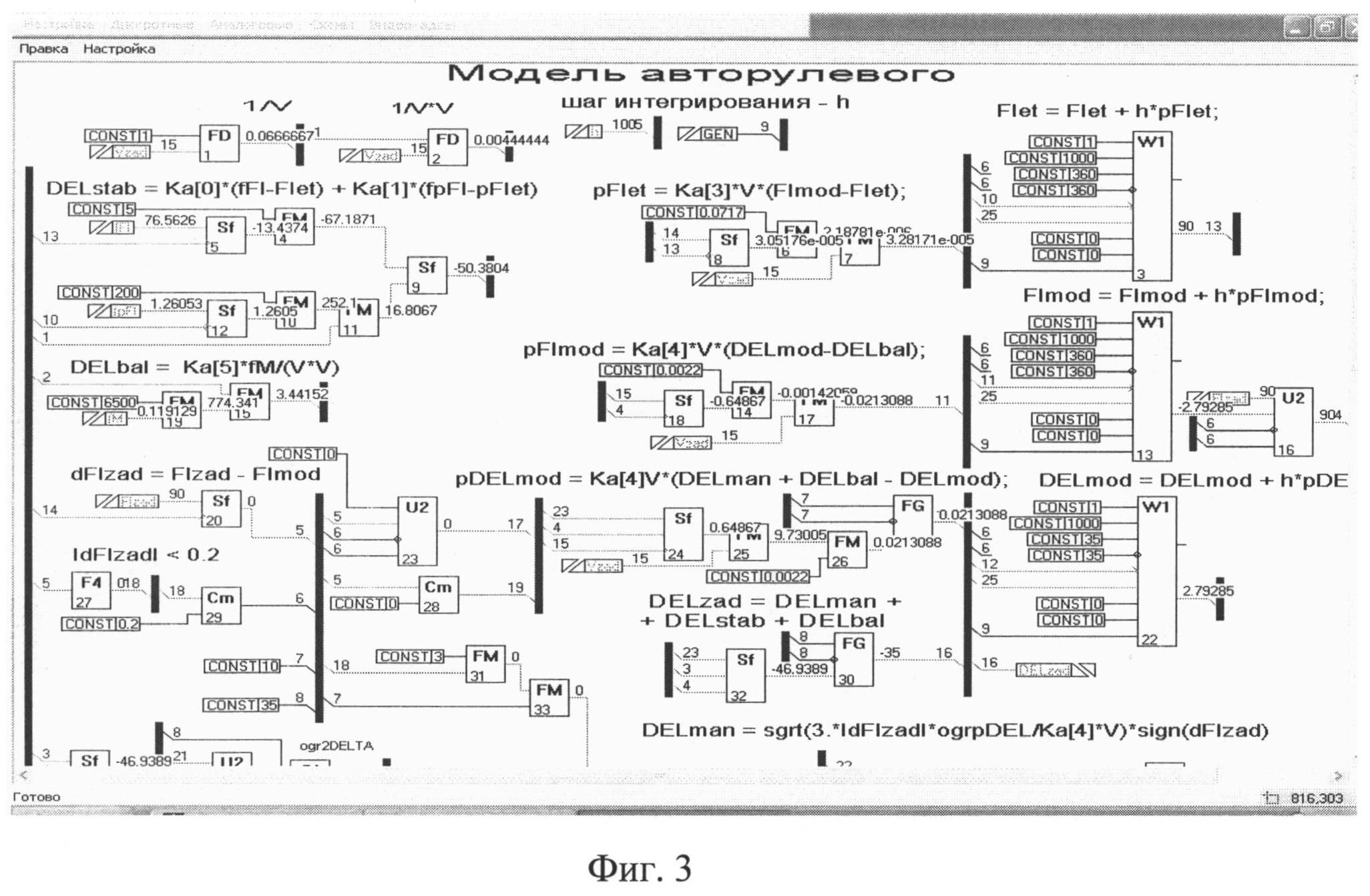
- первый модуль моделирования СУД для разработки и исследования динамических процессов движения корабля, который включает блок измеряемой информации (см. фиг.1) модели динамики движения корабля (см. фиг.2), модели регуляторов и исполнительных средств (см. фиг.3);
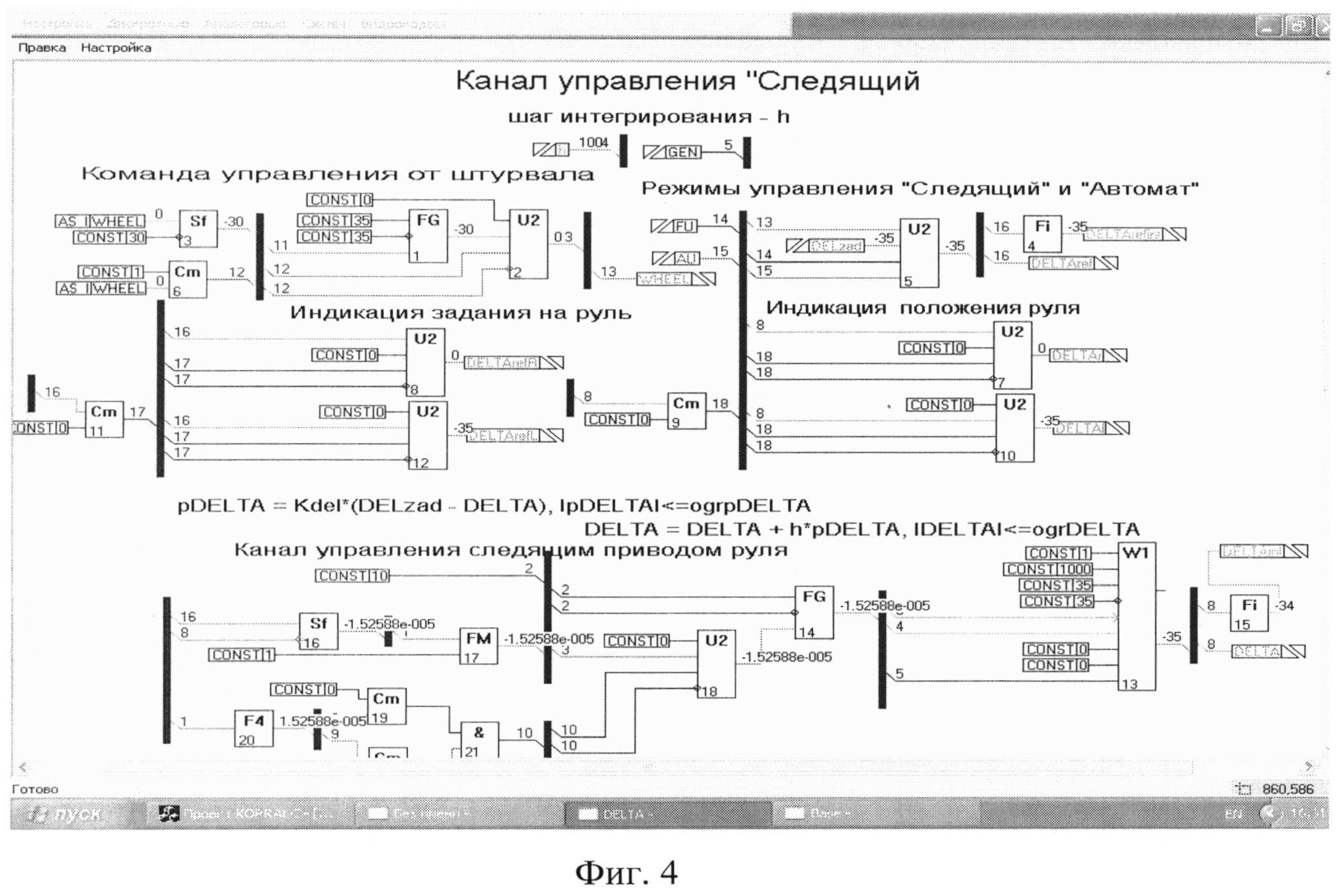
- второй модуль специализированного программного проектирования для автоматизированной разработки СУД корабля (близкой к оптимальной в соответствии с выбранным критерием) и графического построения исследуемых динамических процессов движения корабля, который содержит блок управления и оптимизации режимов, а также блок представления информации и записи полученных результатов (см. фиг.4).
Рассмотренные блоки, связанные через локальную сеть, формируют стенд специализированного программного проектирования для автоматизированного выбора структуры и расчета оптимальных законов управления СУД корабля.
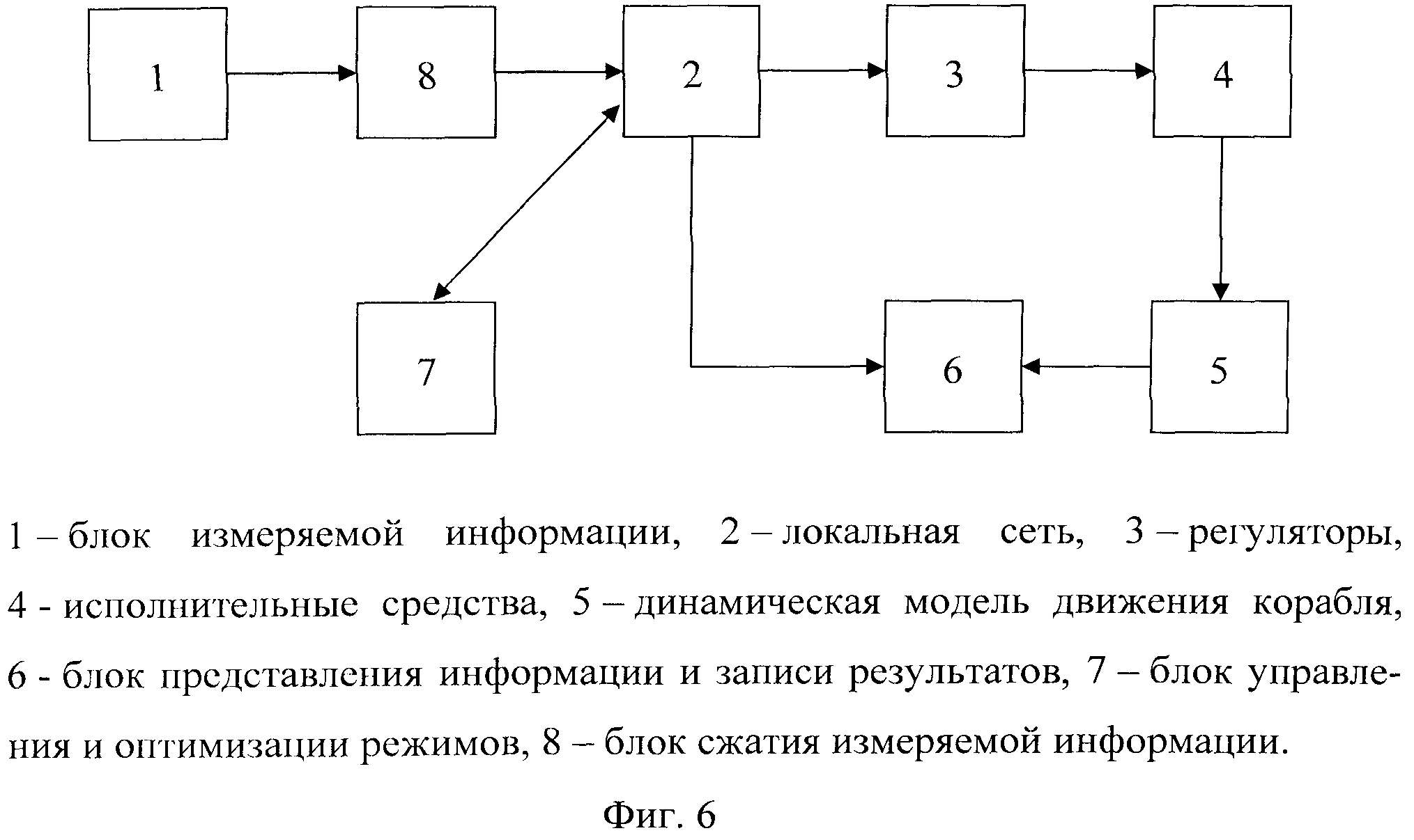
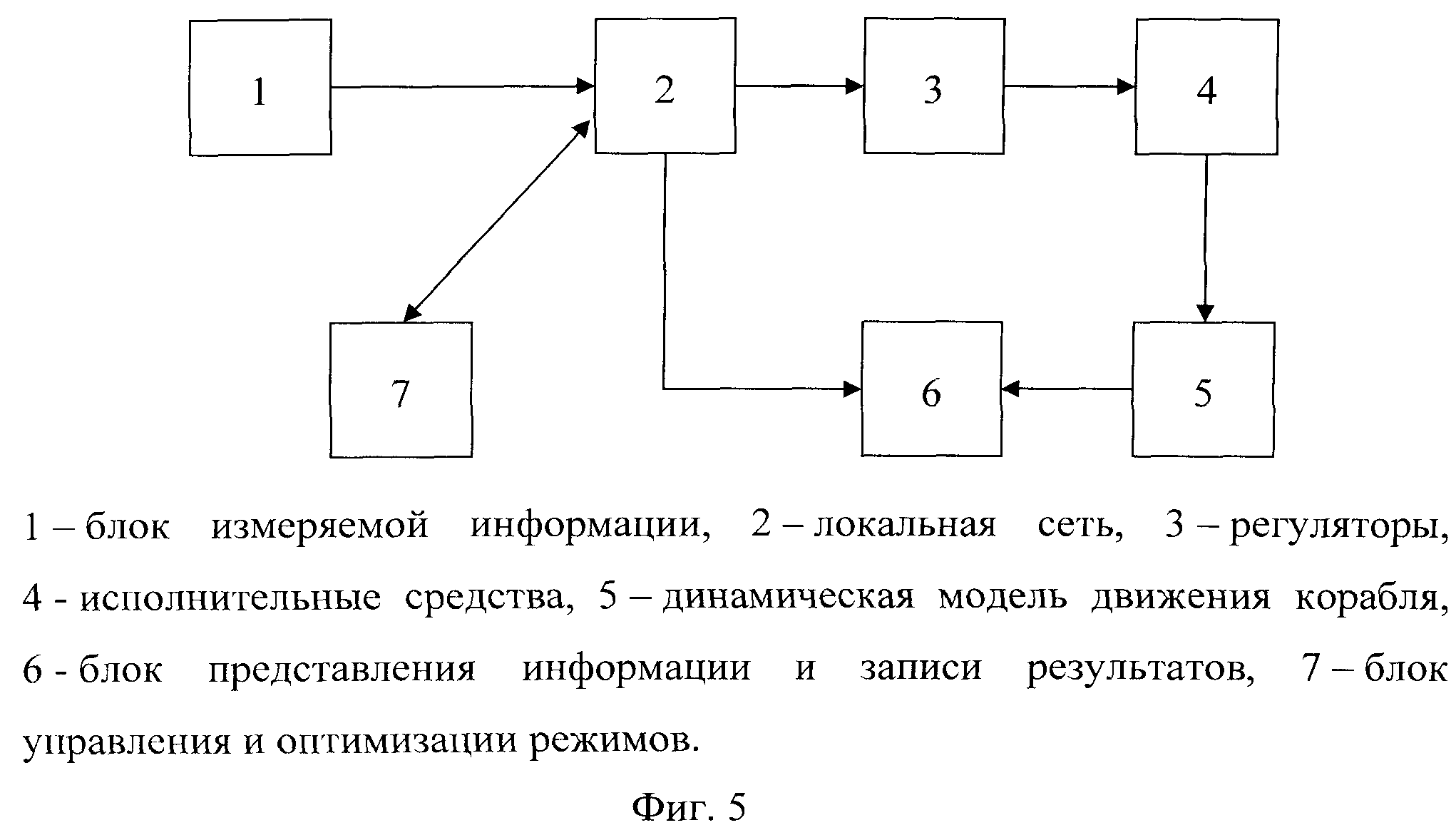
На фиг.5 приведена блок-схема стенда автоматизированного проектирования систем управления движением корабля в соответствии со способом, предложенном в патенте РФ 2423286, содержащая: блок измеряемой информации 1, локальную сеть 2, регуляторы 3, исполнительные средства 4, динамическую модель движения корабля 5, блок представления информации и записи результатов 6, блок управления и оптимизации режимов 7. Способ формирования аппаратно-программных модулей, применяемых при автоматизированном проектировании СУД корабля, использует несколько компьютеров, соединенных локальной сетью. На фиг.1-5 приведены программно-аппаратные модули (блоки) стенда, используемые при автоматизированном проектировании СУД морского судна, созданные в соответствии со способом по патенту РФ 2423286.
К недостаткам известного способа автоматизации проектирования СУД корабля следует отнести то, что:
- исследовательский стенд содержит несколько компьютеров, связанных локальной сетью, которая из-за ограничения пропускной способности не позволяет проводить исследования многомерных процессов управления движением корабля в реальном времени;
- при автоматизированном проектировании системы управления движением корабля удается исследовать только простые режимы эксплуатации корабля в реальном времени, причем основным ограничителем является локальная сеть, связывающая компьютеры (это четко проявляется в локальных сетях передачи измеряемой информации).
Перед заявленным изобретением была поставлена задача устранения отмеченного выше недостатка и расширения возможностей использования стенда при исследовании любых достаточно сложных режимов управления движением корабля в реальном времени, а следовательно, и повышения эффективности такого стенда автоматизированного проектирования систем управления движением корабля.
Поставленная задача решается тем, что предложен способ сжатия информации для автоматизированного проектирования систем управления движением корабля с использованием блока измеряемой информации, локальной сети, регуляторов, исполнительных средств, динамической модели движения корабля, блока представления информации и записи результатов, а также блока управления и оптимизации режимов.
Новым в предложенном способе является использование процесса сжатия измеряемой информации до ее передачи по локальной сети.
Технический результат достигается благодаря введению в стенд проектирования блока сжатия измеряемой информации, на вход которого вводят измеряемую информацию, а выход устройства сжатия измеряемой информации подключают к локальной сети.
Рассмотрим, как реализуется предложенный способ сжатия информации для автоматизированного проектирования системы управления движением корабля.
В предложенном способе, как и в способе по патенту РФ 2423286, используют два модуля:
- первый модуль моделирования СУД для разработки и исследования динамических процессов движения корабля, который включает блоки: измеряемой информации (см. фиг.1) модели динамики движения судна (см. фиг.2), модели регуляторов и исполнительных средств (см. фиг.3);
- второй модуль специализированного программного проектирования для автоматизированной разработки СУД корабля (близкой к оптимальной в соответствии с выбранным критерием) и графического построения исследуемых динамических процессов движения судна, который содержит блок управления и оптимизации режимов, а также блок представления информации и записи полученных результатов (см. фиг.4).
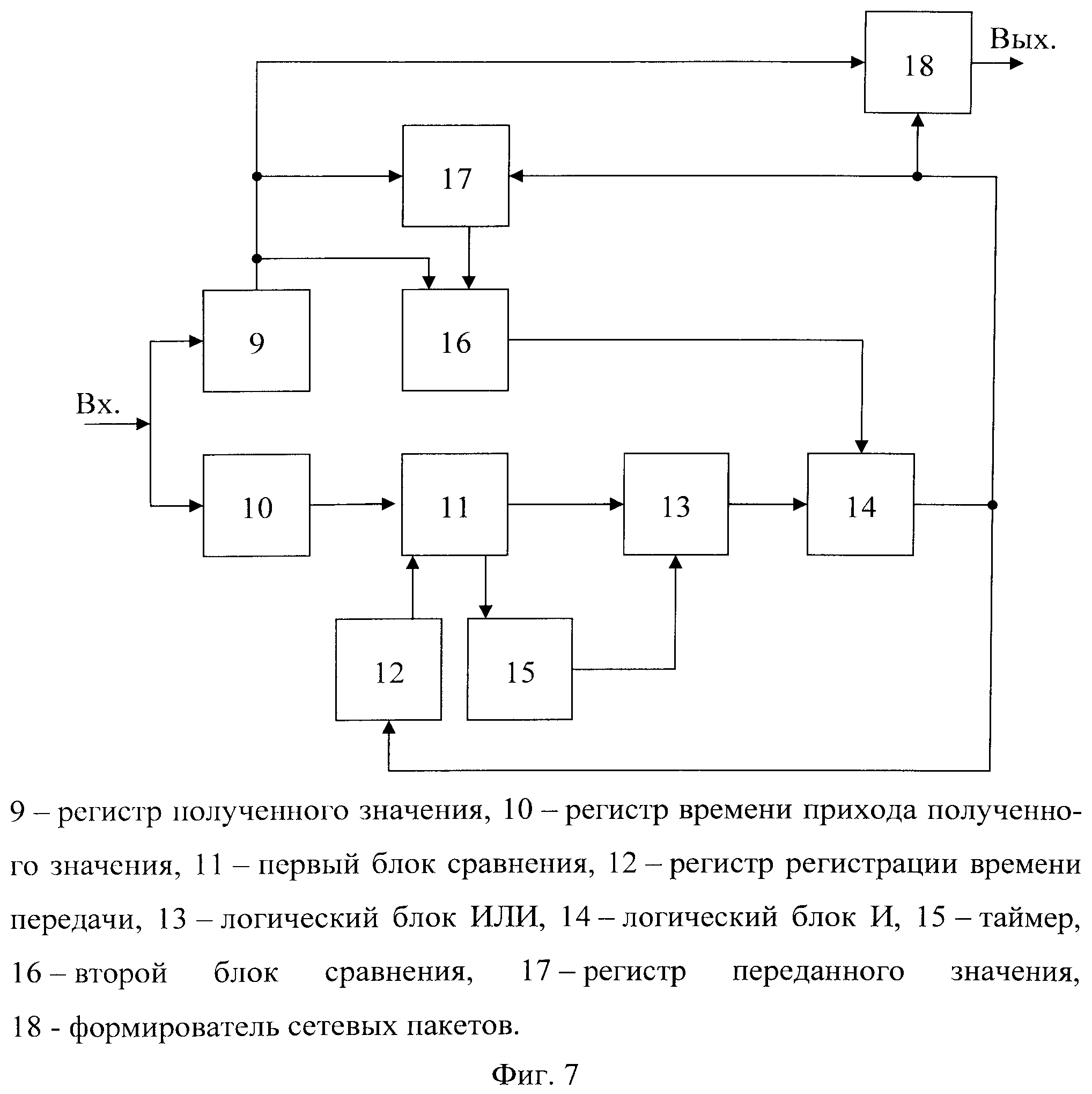
Способ формирования аппаратно-программных модулей, используемых при автоматизированном проектировании СУД корабля, может быть реализован на нескольких компьютерах, связанных локальной сетью. Для расширения объема решаемых задач в способе автоматизированного проектирования систем управления движением корабля используют блок сжатия измеряемой информации 8 (см. фиг.6), содержащий (см. фиг.7): регистр полученного значения 9 и регистр времени прихода полученного значения 10, входы которых соединяют с выходом блока измеряемой информации 1, первый блок сравнения 11, регистр регистрации времени передачи 12, логический блок ИЛИ 13, логический блок И 14, таймер 15, второй блок сравнения 16, регистр переданного значения 17 и формирователь сетевых пакетов 18, выход которого соединяют с локальной сетью 2 (см. фиг.6). Связи внутри блока сжатия информации приведены на фиг.7.
Рассмотрим суть предложенного способа сжатия информации.
По сигналу из блока измеряемой информации 1 (см. фиг.6) фиксируют время в регистре времени прихода полученного значения 10 и вводят в первый блок сравнения 11, на второй вход которого вводят время, зафиксированное по сигналу регистрации времени передачи с регистра регистрации времени передачи 12. В первом блоке сравнения 11 формируют сигнал интервала времени Δt1:
а) если удовлетворяется зависимость
Δt1=t1-t2≥C1,
где: t1 - момент времени прихода полученного значения с регистра времени прихода полученного значения 10,
t2 - момент регистрации времени передачи с регистра регистрации времени передачи 12,
С1 - величина заданного фиксированного интервала времени,
то на первом выходе первого блока сравнения 11 вырабатывают логический сигнал «1», который вводят на вход логического блока ИЛИ 13, с выхода которого логический сигнал «1» вводят на первый вход логического блока И 14;
б) если интервал времени Δt1 в первом блоке сравнения 11 меньше величины С1:
Δt1=t1-t2<С1,
то на втором выходе первого блока сравнения 11 вырабатывают сигнал задержки по времени, равной C1-Δt1, и который вводят на вход таймера 15, с выхода которого через временной интервал Δt=C1-Δt1 логический сигнал «1» вводят на второй вход логического блока ИЛИ 13, с выхода которого логический сигнал «1» вводят на первый вход логического блока И 14.
Одновременно с регистра 9 полученного значения «1» вводят сигнал полученного значения на первый вход второго блока сравнения 16, на второй вход которого с выхода регистра переданного значения 17 вводят сигнал переданного значения (этот сигнал был введен в регистр 17 в предшествующем цикле работы блока сжатия информации 8). Во втором блоке сравнения 16 формируют сигнал Δφ. Если его величина превышает заданное значение С2, то на выходе второго блока сравнения 16 формируют логический сигнал «1», который вводят на второй вход логического блока И 14, в противном случае формируют логический сигнал «0»:
Δφ=|φполуч. знач.-φперед. знач.|>С2,
где: φполуч. знач. - сигнал полученного значения с выхода регистра полученного значения 9,
φперед. знач. - сигнал переданного значения с выхода регистра переданного значения 17,
|| - знак абсолютной величины.
При одновременном наличии логического сигнала «1» из логического блока ИЛИ 13 и логического сигнала «1» из второго блока сравнения 16 в логическом блоке И 14 формируют логический сигнал «1», который вводят на вход: регистра регистрации времени передачи 12, регистра переданного значения 17, формирователя сетевых пакетов 18. Сигнал полученного значения с выхода регистра полученного значения 9 вводят: на вход второго блока сравнения 16, в регистр переданного значения 17, через формирователь сетевых пакетов 18 в локальную сеть 2 (см. фиг.6).
На фиг.6 представлена блок-схема стенда, разработанного в соответствии с предложенным в заявке на изобретение способом сжатия информации для автоматизированного проектирования системы управления движением корабля.
Стенд включает блок измеряемой информации 1 (см. фиг.1), блок сжатия информации 8 (см. фиг.7), локальную сеть 2, регуляторы 3 и исполнительные средства 4 (см. фиг.3), динамическую модель движения корабля 5 (см. фиг.2), блок управления и оптимизации режимов 7, а также блок представления информации и записи полученных результатов 6 (см. фиг.4).
Рассмотренные блоки, связанные через локальные сети, образуют стенд специализированного программного проектирования для автоматизированного выбора структуры и расчета оптимальных законов управления СУД корабля.
Способ формирования аппаратно-программных модулей, используемых в стенде, реализован на нескольких компьютерах, связанных локальными сетями. Для расширения объема решаемых задач используют блок сжатия измеряемой информации 8, содержащий (см. фиг.7): регистр полученного значения 9 и регистр времени прихода полученного значения 10, входы которых соединены с выходом блока измеряемой информации 1, первый блок сравнения 11, регистр регистрации времени передачи 12, логический блок ИЛИ 13, логический блок И 14, таймер 15, второй блок сравнения 16, регистр переданного значения 17 и формирователь сетевых пакетов 18, выход которого соединен с локальной сетью 2 (см. фиг.6). Сигнал времени прихода полученного значения (из блока измеряемой информации 1 (см. фиг.6) фиксируется в регистре времени прихода полученного значения 10 и вводится в первый блок сравнения 11, на второй вход которого поступит сигнал регистрации времени передачи с регистра регистрации времени передачи 12.
Стенд по предложенному способу работает следующим образом.
В первом блоке сравнения 11 формируется сигнал интервала времени Δt1:
а) если 
где: t1 - сигнал времени прихода полученного значения,
t2 - сигнал регистрации времени передачи,
С1 - сигнал заданного фиксированного интервала времени,
то на первом выходе первого блока сравнения 11 вырабатывается логический сигнал «1», который поступает на вход логического блока ИЛИ 13, с выхода которого логический сигнал «1» поступит на первый вход логического блока И 14;
б) если интервал времени Δt1 в первом блоке сравнения меньше величины C1:

то на втором выходе первого блока сравнения 11 вырабатывается сигнал задержки по времени, равной C1-Δt1, который поступает на вход таймера 15, с выхода которого через временной интервал Δt=С1-Δt1 логический сигнал «1» поступит на второй вход логического блока ИЛИ 13, с выхода которого логический сигнал «1» поступит далее на первый вход логического блока И 14. Одновременно с регистра полученного значения 9 сигнал полученного значения поступит на первый вход второго блока сравнения 16, на второй вход которого с выхода регистра переданного значения 17 поступает сигнал переданного значения (этот сигнал был введен в регистр 17 в предыдущем вычислительном цикле). Во втором блоке сравнения 16 формируется сигнал Δφ. Если его величина превышает заданное значение C2, то на выходе второго блока сравнения 16 формируется логический сигнал «1», который поступает на второй вход логического блока И 14:

где: φполуч. знач. - сигнал полученного значения с выхода регистра полученного значения 9,
φперед, знач. - сигнал переданного значения с выхода регистра переданного значения 17,
 - знак абсолютной величины.
- знак абсолютной величины.
При удовлетворении условий: {(1), или [(1a) спустя интервал времени C1-Δt1]} и (2) на выходе логического блока И 14 сформируется логический сигнал «1», который поступит на вход: регистра регистрации времени передачи 12, регистра переданного значения 17, формирователя сетевых пакетов 18. Сигнал полученного значения с выхода регистра полученного значения 9 поступит на вход второго блока сравнения 16, в регистр переданного значения 17, через формирователь сетевых пакетов 18 в локальную сеть 2 (связи в блоке сжатия информации 8 приведены на фиг.7).
Таким образом, очередная передача информационного пакета с выхода блока 10 в локальную сеть 2 не будет происходить до тех пор, пока не набежит время C1 с момента предыдущей передачи и не накопится разница C2 в величине измеренного и переданного сигнала, то есть сжатие информации в блоке 8 сводится к ее прореживанию с отсеиванием всех промежуточных значений измеренного сигнала.
Способ сжатия информации для автоматизированного проектирования систем управления движением корабля с использованием блока измеряемой информации, локальных сетей, регуляторов, исполнительных средств, динамической модели движения корабля, блока представления информации и записи результатов, блока управления и оптимизации режимов, отличающийся тем, что используют блок сжатия информации, содержащий: регистр полученного значения, регистр времени прихода полученного значения, первый блок сравнения, регистр регистрации времени передачи, логический блок ИЛИ, логический блок И, таймер, второй блок сравнения, регистр переданного значения, формирователь сетевых пакетов; на вход регистра полученного значения и регистра времени прихода полученного значения вводят сигнал измеряемой информации с выхода блока измеряемой информации, сигнал времени прихода полученного значения с выхода регистра времени прихода полученного значения вводят в первый блок сравнения, на второй вход которого вводят сигнал времени передачи с регистра регистрации времени передачи; в первом блоке сравнения формируют сигнал интервала времени Δt:а) если сигнал интервала времени Δt удовлетворяет зависимости:Δt=t-t≥C,где: t - момент времени регистрации сигнала прихода полученного значения,t - момент времени регистрации сигнала полученного значения на передачу в локальную сеть,C - сигнал заданного фиксированного интервала времени,то на первом выходе первого устройства сравнения вырабатывают логический сигнал «1», который вводят на вход логического блока ИЛИ, при этом с выхода логического блока ИЛИ логический сигнал «1» вводят на первый вход логического блока И,б) если интервал времени Δt в первом блоке сравнения меньше величины C:Δt=t-t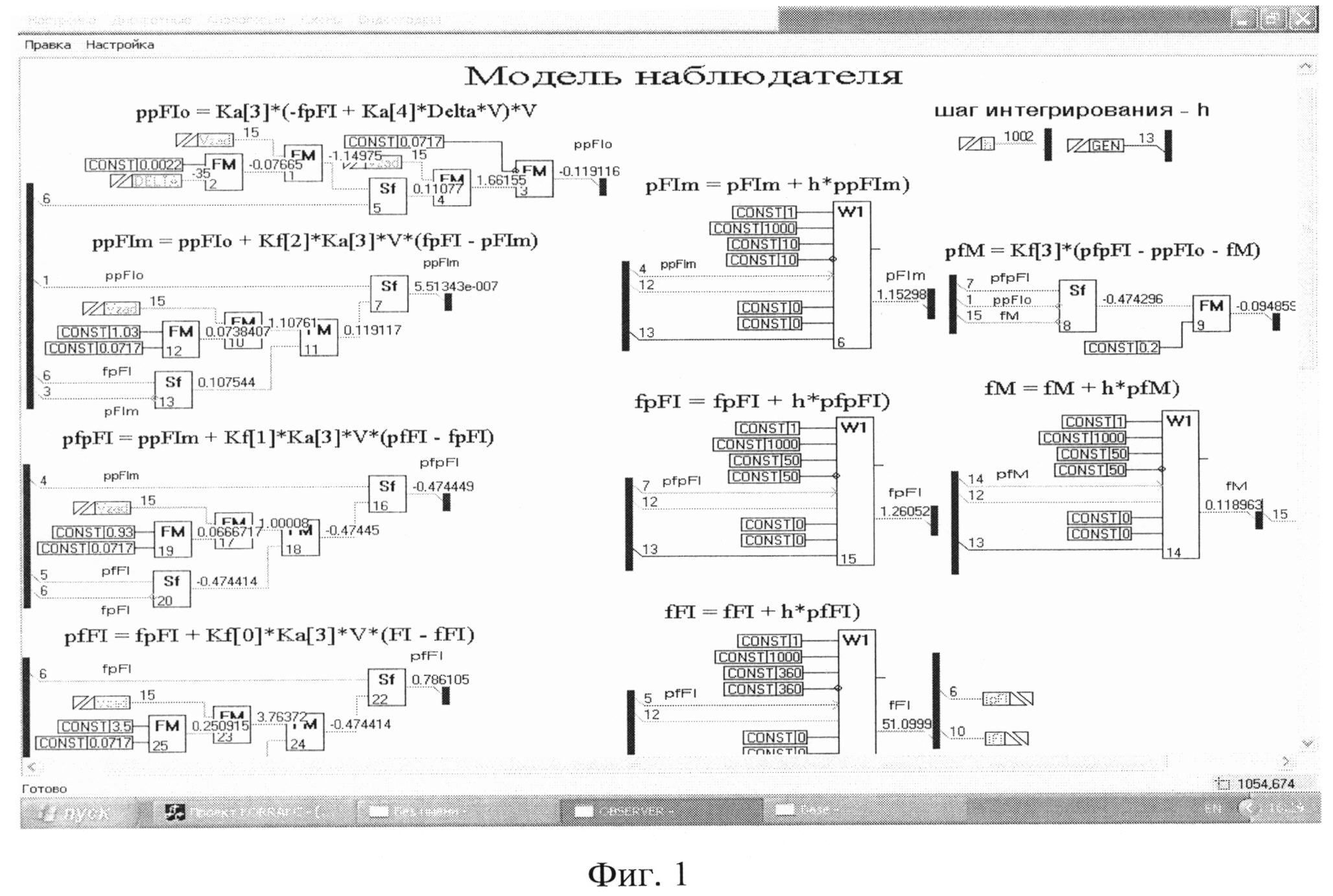

Способ управления движением судна по заданной траектории
Способ управления движением судна с компенсацией медленно меняющихся возмущений
Способ автоматического управления движением судна с учетом волнения
Иерархическая трехуровневая система управления высоковольтной батареей электрических накопителей энергии
Способ отказоустойчивого управления движением корабля по глубине
Способ управления движением судна по широте и долготе
Иерархическая система управления батареей электрических накопителей энергии
Устройство и способ автоматического управления движением судна по расписанию
Способ отказоустойчивого умерения крена судна на подводных крыльях
Отказоустойчивая система автоматического управления движением судна
Способ управления движением судна по заданной траектории
Способ управления движением судна с компенсацией медленно меняющихся возмущений
Способ автоматического управления движением судна с учетом волнения
Иерархическая трехуровневая система управления высоковольтной батареей электрических накопителей энергии
Способ отказоустойчивого управления движением корабля по глубине
Способ управления движением судна по широте и долготе
Иерархическая система управления батареей электрических накопителей энергии
Устройство и способ автоматического управления движением судна по расписанию
Способ отказоустойчивого умерения крена судна на подводных крыльях
Отказоустойчивая система автоматического управления движением судна

