Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО РАСПИСАНИЮ
Вид РИД
Изобретение
Изобретение относится к области судовождения и может быть использовано для автоматического управления движением судна с использованием в качестве основной информации о состоянии судна текущих широты и долготы.
Известна система автоматического управления судном, содержащая задатчик путевого угла, блок формирования путевого угла и бокового сноса судна, блок формирования угловой скорости и датчик угла и перекладки руля. Выход задатчика путевого угла и первый выход блока формирования путевого угла и бокового сноса судна подключены через блок формирования приращения к первому входу рулевого привода, ко второму и к третьему входам которого подключены соответственно выходы блока формирования угловой скорости и датчика угла перекладки руля (патент RU 2240953 C1, B63H 25/04, 27.11.2004 г.) В известной системе управление движением судна осуществляют по сигналам текущего путевого угла, заданного путевого угла и угловой скорости судна, на основании которых формируется закон управления рулевым приводом судна.
Известно также устройство для управления судном по расписанию, содержащее канал регулирования угла δ перекладки руля судна, канал регулирования оборотов n гребного вала судна, приемник спутниковой навигационной системы (CHC), выход сигнала путевого угла (ПУ) которого подключен к первому входу канала регулирования угла δ перекладки руля, а выход скорости V судна указанного приемника - к первому входу канала регулирования оборотов n гребного вала, задатчик маршрута, выход заданного угла узд курса которого подключен ко второму входу канала регулирования угла перекладки руля, а выход заданной скорости φзд задатчика маршрута судна - к первому входу канала регулирования оборотов n гребного вала, способ автоматического управления движением судна (патент RU 2292289 C1, Б.И. №3, 27.01. 2007 г.), принятый в качестве прототипа,
В указанном устройстве автоматическое управление движением судна осуществляется аналогично описанному выше, но с дополнительной корректировкой заданного значения путевого угла в процессе плавания из точки «А» в точку «Б», затем в точку «В»… по заданному маршруту.
Известные системы и способы автоматического управления движением судна обеспечивают движение судна по заданному направлению.
Недостатками указанных устройств и способа управления судном являются:
- отсутствие контроля за нахождением судна в заданной точке траектории в заданное время, т.е. не контролируется совпадение заданного положения судна в пространстве и во времени с текущим положением,
- при появлении поперечных возмущающих силовых воздействий на судно создается большой угол дрейфа судна, что приводит к уходу с заданной траектории движения, а также к экономическим и временным потерям; так как в качестве основной информации используется не координатная информация о местоположении судна, а его угловое направление движения,
- использование только кормового рулевого привода для управления движением судна по заданной траектории создает дополнительный угол дрейфа в процессе изменения направления движения судна, который приводит также к дополнительным отклонениям от заданной траектории в поперечной плоскости судна,
- затруднен проход судном узкостей из-за появления угла дрейфа и бокового сноса судна относительно заданной траектории движения.
Техническим результатом изобретения является повышение точности, экономичности управления движением судном по расписанию, безопасности проводки судна в узкостях и обеспечение возможности перехода на типовое (штатное) управление движением судна при наличии возмущающих сил в поперечном направлении судна.
Технический результат достигается тем, что в устройство для управления судном по расписанию, содержащее канал регулирования угла δ перекладки руля судна, канал регулирования оборотов n гребного вала судна, приемник спутниковой навигационной системы (CHC), выход сигнала путевого угла (ПУ) которого подключен к первому входу канала регулирования угла δ перекладки руля, а выход скорости V судна указанного приемника - к первому входу канала регулирования оборотов n гребного вала, задатчик маршрута, выход заданного угла φзд курса которого подключен ко второму входу канала регулирования угла перекладки руля, а выход заданной скорости Vзд. задатчика маршрута судна - к первому входу канала регулирования оборотов n гребного вала, введены подруливающее устройство судна, регулятор оборотов nподр подруливающего устройства, образующих канал регулирования оборотов nподр подруливающего устройства судна, формирователь коэффициентов законов управления, блок четырех секторов граничных значений углов положения вектора ПУ:
«а)» (-π/4)=+7π/4 < угол вектора ПУ < + π/4, или
«б)» +π/4 < угол вектора ПУ < +3π/4, или
«в)» +3π/4 < угол вектора ПУ < +5π/4, или
«г)» +5π/4 < угол вектора ПУ < +7π/4=(-π/4),
блок сравнения, блок разностей и блок коррекции законов управления угла δ перекладки руля, оборотов n гребного вала, оборотов nподр подруливающего устройства, выход ПУ приемника CHC и выход заданного угла φзд курса задатчика маршрута подключены к входам блока сравнения, выполненного с возможностью формирования модуля разности |ПУ-φзд| на выходе, который соединен с первым входом блока разностей, второй вход которого подключен к выходу формирования текущей широты Ф или долготы γ судна приемника CHC, а третий - к выходу заданного угла φзд курса задатчика маршрута, который соединен с первым входом блока коррекции законов управления указанных каналов регулирования, второй, третий, четвертый и пятый входы которого соединены соответственно с выходом блока разностей, с выходом формирователя коэффициентов законов управления, с выходом указанного блока четырех секторов, с выходом сигнала угла курса φ из приемника CHC, который соединен с первым входом формирователя коэффициентов законов регулирования и входом блока четырех секторов граничных значений углов положения вектора ПУ, второй вход формирователя коэффициентов законов управления подключен ко второму выходу блока разности, а выход указанного блока коррекции - к третьим входам канала регулирования угла δ перекладки руля и канала регулирования оборотов гребного вала и входу канала регулирования подруливающего устройства судна.
Технический результат в способе обеспечивается тем, что в способе автоматического управления движением судна по расписанию, в котором сигналы путевого угла ПУ и скорости хода судна V из приемника CHC подают на входы каналов регулирования угла δ рулевого привода и на вход канала регулирования оборотов n привода гребного вала соответственно, сигналы заданного угла φЗ курса ∂. и заданной скорости Vзд. хода из задатчика маршрута подают в канал регулирования угла δ рулевого привода и в канал регулирования оборотов n привода гребного вала соответственно, в которых формируют законы типового управления указанными параметрами, сигнал путевого угла ПУ из приемника CHC и сигнал заданного угла φзд курса из задатчика маршрута сравнивают в блоке сравнения, на выходе которого формируют модуль разности |ПУ-φзд|, который сравнивают с постоянной C, если выполняется условие |ПУ-φзд|>C, то через интервалы времени Δt повторяют операцию сравнения сигнала модуля |ПУ-φзд| с постоянной C до тех пор, пока указанное условие |ПУ-φзд|>C выполняется; если выполняется условие |ПУ-φзд|≤C, осуществляют корректировку сформированных ранее законов управления угла δ рулевого привода и оборотов n привода гребного вала, для этого в блоке разностей формируют сигналы разности текущей широты Ф и заданной широты Фзд судна и текущей долготы γ и заданной долготы γзд судна из задатчика маршрута, которые подают в блок коррекции законов управления; в блоке четырех секторов путевого угла формируют зоны четырех сектора граничных значений вектора ПУ:
«а)» (-π/4)=+7π/4 < угол вектора ПУ < +π/4, или
«б)» +π/4 < угол вектора ПУ < +3π/4, или
«в)» +3π/4 < угол вектора ПУ < +5π/4, или
«г)» +5π/4 < угол вектора ПУ < +7π/4=(-π/4),
определяют, в каком из указанных секторов находится в данный момент времени вектор путевого угла ПУ и вводят граничные значения ПУ соответствующего выявленного сектора в формирователь коэффициентов законов управления и блок коррекции законов управления, при этом:
если вектор ПУ находится в зоне а), то в формирователе коэффициентов законов управления формируют:
коэффициенты K1 и  с использованием констант C1,
с использованием констант C1,  и сигнала угла курса φ из приемника CHC:
и сигнала угла курса φ из приемника CHC:
K1=C1/cos(φ),
 ,
,
которые вводят в блок коррекции законов управления угла δ перекладки руля, оборотов n гребного вала, оборотов nподр подруливающего устройства, где формируют сигнал коррекции закона управления угла δ рулевого привода:
 ,
,
который вводят в канал регулирования угла δ рулевого привода, а сигналы K1(ПУ-φзд)+K2ω, где ω - угловая скорость судна, из приемника CHC и задатчика маршрута, отключают от канала регулирования угла δ рулевого привода;
коэффициент регулирования K2 с использованием константы G2 и сигнала угла курса φ из приемника CHC:
K2=C2/cos(φ),
который вводят в блок коррекции законов управления для формирования сигнала коррекции закона управления оборотами гребного вала Δnзд.:
Δnзд.=-K2(Ф-Фзд),
который вводят в канал регулирования оборотов n гребного вала:
nзд.=Δnзд+K1(V-Vзд)+f(n,V);
коэффициент регулирования K3 с использованием константы C3 и сигнала угла курса φ из приемника CHC:
K3=C3/cos(φ),
в блоке коррекции законов управления формируют сигнал заданных оборотов nподр. зд подруливающего устройства:
nподр.зд.=-K3(γ-γзд),
который подают на вход канала регулирования оборотов nподр подруливающего устройства;
если вектор ПУ находится в зоне сектора б), то в формирователе коэффициентов законов управления формируют:
коэффициенты регулирования K1 и
c использованием констант C1,
и сигнала угла курса φ из приемника CHC:
K1=C1/cos(180°-φ),
 ,
,
которые подают в блок коррекции законов управления, где формируют закон управления рулевым приводом:
 ,
,
который подают в канал регулирования угла δ рулевого привода, а сигналы
K1(ПУ-φзд)+K2ω из приемника CHC и задатчика маршрута отключают от канала регулирования угла δ рулевого привода;
коэффициент регулирования K2 с использованием константы C2 и сигнала угла курса φ из приемника CHC:
K2=C2/cos(180°-φ),
который подают в блок коррекции законов управления для формирования сигнала коррекции закона управления оборотами Δnзд гребного вала nподр;
Δnзд.=K2(Ф-Фзд),
который вводят на вход канала регулирования оборотами n гребного вала, где формируют сигнал задания оборотов nзд гребного вала:
nзд.=Δnзд+K1(V-Vзд).+f(n,V);
коэффициент регулирования K3 с использованием константы C3 и сигнала угла курса φ из приемника CHC:
K3=C3/cos(180°-φ),
который подают в блок коррекции законов управления, где формируют сигнал заданных оборотов nподр. зд подруливающего устройства:
nподр.зд.=K3(γ-γзд),
который подают в канал регулирования оборотов nподр подруливающего устройства;
если вектор ПУ находится в секторе в), то в формирователе коэффициентов законов управления формируют:
коэффициент регулирования K4 с использованием константы C4 и сигнала угла курса φ из приемника CHC:
K4=C4/cos(90°-φ),
который вводят в блок коррекции законов управления, где формируют сигнал управления рулевым приводом Δδкорр
Δδкорр=-K4(Ф-Фзд),
который подают на вход канала регулирования угла δ рулевого привода, а сигналы K1(ПУ-φзд)+K2ω, подаваемые на вход канала регулирования угла δ рулевого привода из приемника CHC и задатчика маршрута, отключают;
коэффициент регулирования K5 с использованием константы C5, и сигнала угла курса φ из приемника CHC:
K5=C5/cos(90°-φ),
который подают в блок коррекции законов управления для формирования сигнала коррекции оборотов Δnзд гребного вала:
Δnзд.=-K5(γ-γзд),
который подают на вход канала регулирования оборотов n гребного вала где формируют закон управления:
nзд.=Δnзд+K1(V-Vзд)+f(n,V.);
коэффициент регулирования K3 с использованием константы С3 и сигнала угла курса - φ из приемника CHC:
K3=C3/cos(90°-φ),
который подают в блоке коррекции законов управления, где формируют сигнал скорости nподр. зд подруливающего устройства:
nподр.зд.=K3(Ф-Фзд),
который подают на вход канала регулирования оборотов nподр подруливающего устройства, который вводят в подруливающее устройство;
если вектор ПУ находится в зоне сектора г), то в формирователе коэффициентов законов управления формируют:
коэффициент регулирования K4 с использованием константы C4 и сигнала угла курса φ из приемника CHC:
K4=C4/cos(270°-φ),
который подают в блок коррекции законов управления, где формируют сигнал управления рулевым приводом Δδкорр:
Δδкорр=-K4(Ф-Фзд),
который подают на вход канала регулирования угла δ рулевого привода, а сигналы K1(ПУ-φзд)+K2ω, подаваемые на вход канала регулирования угла δ рулевого привода из приемника CHC и задатчика маршрута, отключают;
коэффициент регулирования K5 с использованием константы C5, и сигнала угла курса φ - из приемника CHC:
K5=C5/cos(270°-φ),
который подают в блок коррекции законов управления, где формируют сигнал коррекции оборотов Δnзд гребного вала:
Δnзд=K5(γ-γзд),
который подают на вход канала регулирования оборотов n гребного вал, формируя закон управления приводом гребного вала: nзд=Δnзд+K1(V-Vзд)+f(n,V);
коэффициент регулирования K3 с использованием константы C3 и сигнала угла курса φ из приемника CHC:
K3=C3/cos(270°-φ),
который вводят в блоке коррекции законов управления, где формируют nподр. зд :
nподр.зд.=-K3(Ф-Фзд),
который подают на вход канала регулирования оборотов nподр подруливающего устройства;
коэффициент регулирования K4 с использованием константы C4 и сигнала угла курса φ - из приемника CHC:
K4=C4/cos(270°-φ),
который подают в блок коррекции законов управления, где формируют сигнал управления углом Δδкорр рулевого привода:
Δδкорр=-K4(Ф-Фзд),
который подают на вход канала регулирования угла δ рулевого привода δ, а сигналы K1(ПУ-φзд)+K2ω, подаваемые на вход канала регулирования угла δ рулевого привода из приемника CHC и задатчика маршрута, отключают;
коэффициент регулирования K5 использованием константы C5, и сигнала угла курса φ из приемника CHC:
K5=C5/cos(270°-φ),
который подают в блок коррекции законов управления, где формируют сигнал коррекции оборотов Δnзд гребного вала:
Δnзд=K5(γ-γзд),
который подают на вход канала регулирования оборотов n гребного вала, где формируют закон управления приводом гребного вала:
nзд=Δnзд+K1(V-Vзд)+f(n,V);
коэффициент регулирования K3 с использованием константы C3 и сигнала угла курса φ из приемника CHC:
K3=C3/cos(270°-φ),
который подают в блоке коррекции законов управления, где формируют nподр. зд формируют сигнал:
nподр.зд.=-K3(Ф-Фзд),
который подают на вход канала регулирования оборотов nподр, подруливающего устройства, через интервал времени Δt в блоке сравнения формируют модуль разности сигнала |ПУ-φзд| и сравнивают с постоянной C, и если удовлетворяется условие |ПУ-φзд|≤C, то через следующие интервалы времени Δt в блоке сравнения повторяют операцию сравнения до тех пор, пока удовлетворяется условие |ПУ-φзд|≤C; если в момент времени mΔt указанное условие |ПУ-φзд|≤C продолжает удовлетворяться, то повторяют цикл корректировки коэффициентов законов управления указанных параметров; если удовлетворяется неравенство |ПУ-φзд|>C, то цикл корректировки законов управления указанными параметрами прекращается и осуществляют типовое управлении указанными параметрами.
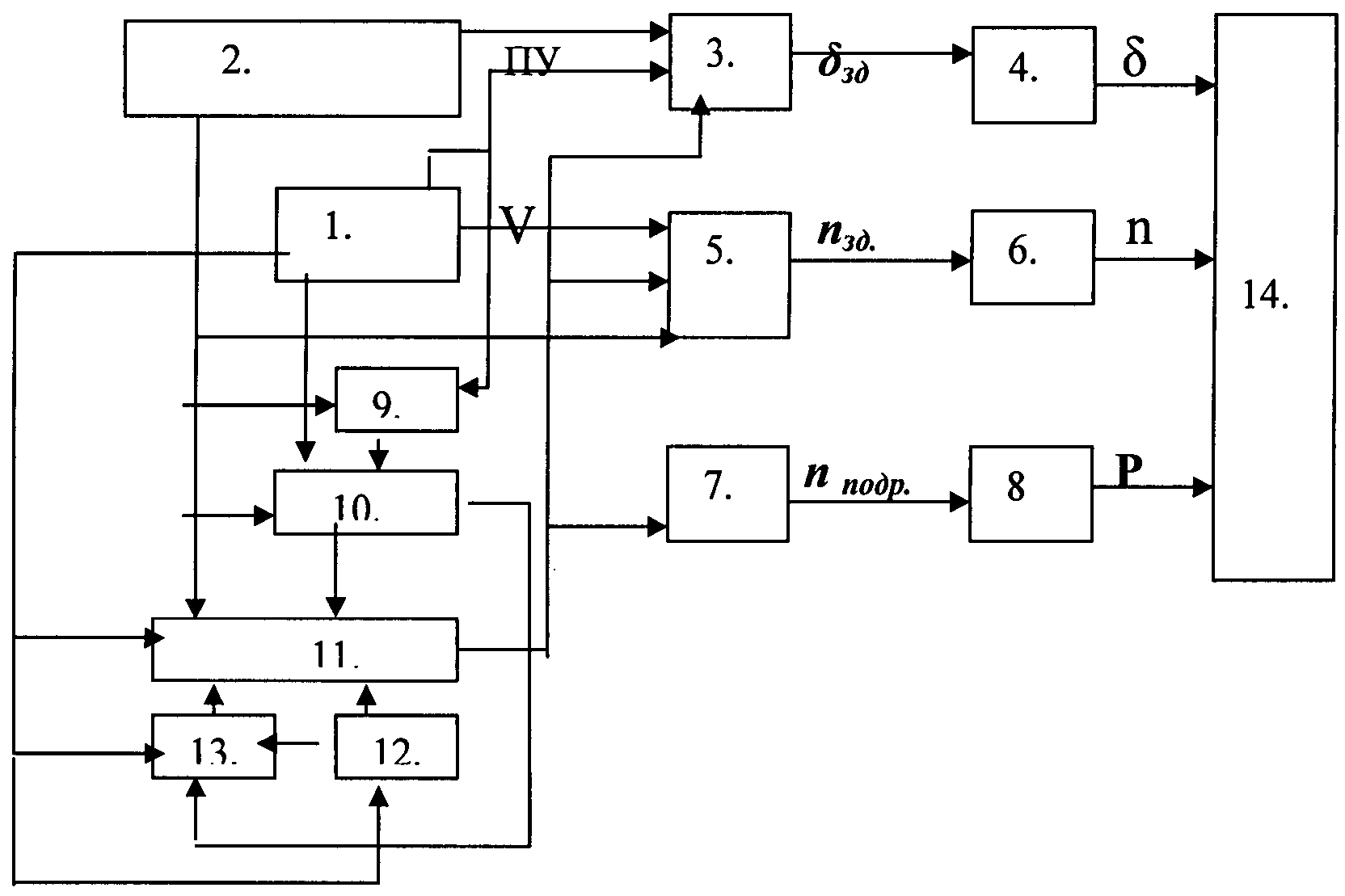
На чертеже представлена блок-схема системы автоматического управления движением судна по расписанию.
Система автоматического управления судном по расписанию содержит приемник 1 спутниковой навигационной системы (CHC) с выходами сигнала путевого угла (ПУ), текущей скорости V судна, выходом текущих широты и долготы и выходом сигнала угла курса φ, задатчик 2 маршрута с выходами заданного ПУ и заданного φзд угла курса, регулятор 3 угла δзд перекладки руля, рулевой привод 4, регулятор 5 оборотов nзд гребного вала, привод 6 гребного вала, регулятор 7 оборотов nподр подруливающего устройства, подруливающее устройство 8, блок 9 сравнения, блок 10 разностей, блок 11 коррекции законов управления угла δ перекладки руля, оборотов n гребного вала, оборотов nподр подруливающего устройства, блок 12 четырех секторов граничных значений углов положения вектора ПУ, формирователь 13 коэффициентов законов управления и судно 14 - объект управления.
Выход сигнала ПУ приемника CHC подключен к входу канала регулирования угла δзд перекладки руля, образованному регулятором 3 угла δзд и рулевым приводом 4, а выход скорости V судна приемника 1 CHC - к первому входу канала регулирования оборотов nзд гребного вала, образованного регулятором 5 оборотов гребного вала и приводом 6 гребного вала. Выход ПУ приемника 1 CHC и выход заданного угла φзд курса задатчика 2 маршрута подключены к входам блока 9 сравнения, формирующего модуль разности |ПУ-φзд| на выходе, который соединен с первым входом блока 10 разностей. Второй вход блока 10 разностей подключен к выходу формирования текущей широты Ф или долготы γ судна приемника CHC, а третий - к выходу заданного угла φзд курса задатчика 2 маршрута, соединенному со вторым входом канала регулирования оборотов nзд гребного вала и первым входом блока 11 коррекции законов управления угла δ перекладки руля, оборотов n гребного вала, оборотов nподр подруливающего устройства. Второй, третий, четвертый и пятый входы указанного блока 11 коррекции соединены с выходами блока 10 разности, формирователя 13 коэффициентов законов управления, блока 12 четырех секторов граничных значений углов положения вектора ПУ и четвертым выходом сигнала угла φ курса приемника 1 CHC. Выход указанного блока 11 подключен к третьим входам каналов регулирования угла δ перекладки руля, канала регулирования оборотов nз гребного вала и входу канала регулирования оборотов nподр, подруливающего устройства 8. Четвертый выход приемника 1 CHC соединен с первым входом формирователя 13 коэффициентов управления, второй вход которого подключен ко второму выходу блока 10 разности, а третий - к входу блока 12 четырех секторов, который формирует зоны четырех граничных значений ПУ:
«а)» (-π/4)=+7π/4 < угол вектора ПУ < +π/4, или
«б)» +π/4 < угол вектора ПУ < +3π/4, или
«в)» +3π/4 < угол вектора ПУ < +5π/4, или
«г)» +5π/4 < угол вектора ПУ < +7π/4=(-π/4).
Способ управления в системе автоматического управления движением судна по расписанию осуществляется следующим образом.
Типовое управление по путевому углу ПУ=φзд формируется во 2ой подсистеме управления кормовым рулевым приводом. Для этого в регулятор 3 рулевого привода 4 вводят сигналы:
ПУ - текущего путевого угла из приемника 1 (CHC),
φзд - заданного (программного) угла курса из задатчика 2 маршрута,
ω - угловой скорости судна, которая формируется в регуляторе 3 рулевого привода.
Закон управления углом д перекладки руля имеет вид:

где δзд - заданный угол перекладки руля,
φзд(t) - заданный (программный) угол курса,
K1,K2 - коэффициенты регулирования;
Сигнал δзд по зависимости (1) с выхода регулятора 3 рулевого привода вводят на вход рулевого привода 4, что обеспечивает вывод судна на путевой угол ПУ, равный заданному (программному) углу курса φзд.
Для типового управление канала управления оборотами n гребного вала (скоростью хода судна - V=Vзд) на ее вход вводят сигналы: заданной скорости хода Vзд. из задатчика 2 маршрута и текущей скорости хода V из приемника 1 CHC. Эти сигналы вводят на вход регулятора 5 оборотов и гребного вала для формирования закона управления оборотами гребного вала:

где nзд - заданные обороты гребного вала n,
f(n,V) - типовой закон регулирования оборотов n гребного вала.
Если |ПУ-φзд|≤C1, то осуществляется формирование точного закона управления следующим образом.
Переход со штатного (типового) управления с использованием текущего и заданного путевого угла ПУ и заданной скорости хода судна на более точное управление с использованием текущих и заданных широт и долгот, производится только при выполнении условия: модуль от разности путевого угла и заданного значения угла курса не превышает допустимую величину:
|ПУ-φзд|≤C1.
При выполнении этого условия подключается канал регулирования углом оборотов nподр подруливающего устройства 8; осуществляется перестройка законов управления (1) и канала регулирования углом перекладки руля и оборотами гребного вала закон управления строится с использованием текущих и заданных широт и долгот.
Сигнал ПУ из приемника 1 CHC и сигнал заданного φзд угла курса из задатчика 2 маршрута вводят на вход блока 9 сравнения, в котором формируют модуль разности сигналов |ПУ-φзд|.
Если |ПУ-φзд|>C, что соответствует использованию типового режима управления, то сигналы ПУ и φзд отключают от входа блока 9 сравнения, а через интервал времени Δt сигналы ПУ и φзд вновь вводят в блок 9 сравнения, формируя модуль разности сигналов |ПУ-φзд|, и сравнивают с постоянной С. Если |ПУ-φзд|>C, то вновь через интервалы времени Δt в блоке 9 сравнения повторяют операции сравнения этих сигналов, при этом функционирует штатное управление движением судна.
Если в блоке 9 сравнения удовлетворяется условие |ПУ-φзд|≤C, то формируют точный закона управления следующим образом.
В блоке 10 разностей формируют сигналы разности текущей широты Ф или долготы γ судна из приемника 1 CHC и заданной широты Фзд, или заданной долготы γзд из задатчика 2 маршрута: (Ф-Фзд) или (γ-γзд), которые вводят в блок 11 коррекции законов управления угла δ перекладки руля, оборотов n гребного вала, оборотов nподр подруливающего устройства.
В блоке 12 четырех секторов граничных значений углов положения вектора ПУ формируют сигнал одного из четырех секторов, в котором находится в данный момент вектор ПУ, используя сигнал путевого угла из приемника 1 CHC и сигналы заданных углов соответствующих граничных значений одного из четырех секторов:
«а).» (-π/4)=+7π/4 < угол вектора ПУ < +π/4, или
«б)» +π/4 < угол вектора ПУ < +3π/4, или
«в)» +3π/4 < угол вектора ПУ < +5π/4, или
«г)» +5π/4 < угол вектора ПУ < +7π/4=(-π/4).
Сигнал одного из указанных четырех секторов, в котором находится в данный момент вектор ПУ вводят в блок 11 коррекции законов управления для формирования сигналов управления в этом блоке, куда уже введены сигналы разности: (Ф-Фзд) или (γ-γзд).
В формирователе 13 коэффициентов законов управления формируют коэффициенты регулирования, которые вводят в блок 11 коррекции законов управления, в котором формируют сигналы законов управления:
коррекция Δδкор для канала управления углом перекладки руля кормового рулевого привода 4 с отключением закона управления (1);
коррекции оборотов Δnзд гребного вала для канала управления оборотами гребного вала;
коррекция заданных оборотов nподр для регулятора 7 подруливающего устройства 8.
При наличии сигнала нахождения ПУ в секторе «а)» из блока 12 четырех секторов формируют:
коэффициенты регулирования K1 и
в формирователе 13 коэффициентов законов управления с использованием констант C1,  и сигнала курса φ из приемника 1 CHC:
и сигнала курса φ из приемника 1 CHC:
K1=C1/cos(φ),
.
Сигналы коэффициентов K1 и
регулирования вводят в блок 11 коррекции законов управления, где формируют сигнал управления углом δ перекладки руля:
 .
.
Сигнал Δδкорр вводят на вход регулятора 3 рулевого привода 4, а сигналы. K1(ПУ-φзд)+K2ω, подключенные к входу регулятора 3 рулевого привода 4 из приемника 1 CHC и задатчика 2 маршрута отключают, т.е. отключают типовой режим управления по закону (1);
коэффициент регулирования K2 с использованием константы C2 и сигнала угла φ курса из приемника 1 CHC:
K2=C2/cos(φ),
который вводят в блок 11 коррекции законов управления для формирования сигнала коррекции оборотов Δnзд гребного вала:
Δnзд=-К2(Ф-Фзд),
который вводят на вход регулятора 5 оборотов n гребного вала для формирования коррекции закона управления оборотами nзд гребного вала:
 .
.
который подают на вход привода 6 оборотов гребного вала;
коэффициент регулирования K3 с использованием константы C3 и сигнала угла φ курса из приемника 1 CHC:
K3=C3/cos(φ).
В блоке 11 коррекции законов управления формируют сигнал заданных оборотов nпод зд подруливающего устройства:

который вводят на вход регулятора 7 оборотов nподр, подруливающего устройства 8, сигнал с выхода которого вводят в подруливающее устройство.
При наличии сигнала о нахождения ПУ в секторе «в)» из блока 12 четырех секторов граничных значений углов положения вектора ПУ формируют коэффициенты регулирования K1 и
в формирователе 13 коэффициентов законов управления с использованием констант C1,
и сигнала угла φ курса из приемника 1 CHC:
K1=C1/cos(180°-φ),
,
которые вводят в блок 11 коррекции законов управления, где формируют закон управления рулевьм приводом 4:
 .
.
Сигналы K1(ПУ-φзд)+K2ω, подключенные к входу регулятора 3 угла δ перекладки рулевого привода 4 из приемника 1 CHC и задатчика 2 маршрута, отключают, т.е отключают типовой режим управления по закону (1)). Сигнал Δδкорр вводят на вход регулятора 3 рулевого привода 4;
коэффициент регулирования K2 с использованием константы C2 и сигнала угла φ курса из приемника 1 CHC:
K2=C2/cos(180°-φ),
который вводят в блок 11 коррекции сигналов управления для формирования сигнала коррекции оборотов Δnзд гребного вала:
Δnзд=K2(Ф-Фзд),
который вводят на вход регулятора 5 оборотов n гребного вала для формирования закона управления оборотами n гребного вала:

Коэффициент регулирования K3 с использованием константы C3 и сигнала угла φ курса из приемника 1 CHC:
K3=C3/cos(180°-φ).
В блоке 11 коррекции законов управления формируют сигнал заданных оборотов nпод зд подруливающего устройства 8:

который вводят на вход регулятора 7 оборотов подруливающего устройства 8, с выхода которого сигнал nподр вводят в подруливающее устройство 8.
При наличии сигнала о нахождения ПУ в секторе «б)» из блока 12 четырех секторов в формирователе 13 коэффициентов законов управления формируют:
коэффициент регулирования K4 с использованием констант C4 и сигнала угла φ курса из приемника 1 CHC:
K4=C4/cos(90°-φ),
который вводят в блок 11 коррекции законов управления, где формируют сигнал управления рулевым приводом 4:

который вводят на вход регулятора 3 рулевого привода 4. Сигналы K1(ПУ-φзд)+K2ω, подключенные к входу регулятора 3 рулевого привода 4 из приемника 1 CHC и задатчика 2 маршрута, отключают, то есть отключают типовой режима управления по закону (1);
коэффициент регулирования K5 с использованием константы C5 и сигнала угла φ курса из приемника 1 CHC:
K5=C5/cos(90°-φ),
который вводят в блок 11 коррекции законов управления для формирования сигнала коррекции оборотов Δnзд гребного вала:
Δnзд=-K5(γ-γзд),
который вводят на вход регулятора 5 оборотов n гребного вала и формируют закон управления:

коэффициент регулирования K3 с использованием константы C3 и сигнала угла φ курса из приемника 1 CHC:
K3=C3/cos(90°-φ).
В блоке 11 коррекции законов управления формируют сигнал заданных оборотов nпод зд подруливающего устройства 8:

который вводят на вход регулятора 7 оборотов подруливающего устройства 8. Сигнал nподр с выхода регулятора 7 оборотов вводят в подруливающее устройство 8.
При наличии сигнала о нахождении ПУ в секторе «г)» из блока 12 четырех секторов в формирователе 13 коэффициентов законов управления, формируют:
коэффициент регулирования K4 с использованием константы C4 и сигнала угла φ курса из приемника 1 CHC:
K4=C4/cos(270°-φ), который вводят в блок 11 коррекции законов управления для формирования сигнала управления рулевым приводом 4:

который вводят на вход регулятора 3 рулевого привода 4. Сигналы K1(ПУ-φзд)+K2ω, подключенные к входу регулятора 3 рулевого привода 4 из приемника 1 CHC и задатчика 2 маршрута, отключают, то есть отключают типовой режима управления по закону (1);
коэффициент регулирования K5 с использованием константы C5, и сигнала угла φ курса из приемника 1 CHC:
K5=C5/cos(270°-φ),
который вводят в блок 11 коррекции законов управления, для формирования сигнала коррекции оборотов Δnзд гребного вала:
Δnзд=K5(γ-γзд),
который вводят на вход регулятора 5 оборотов n гребного вала и формируют закон управления:

коэффициент регулирования K3 с использованием константы C3 и сигнала угла φ курса из приемника 1 CHC:
K3=C3/cos(270°-φ).
В блоке 11 коррекции законов управления формируют сигнал заданных оборотов nпод зд подруливающего устройства 8:

который вводят на вход регулятора 7 оборотов подруливающего устройства 8, с выхода которого сигнал оборотов nподр. зд вводят в подруливающее устройство 8.
Таким образом, осуществляется формирование и включение в работу режима точного управления судном с использованием рулевого привода 4 привода 6 оборотов гребного вала и подруливающих устройств 8.
Через интервалы времени Δt контролируется нахождение судна в допустимой области использования точного управления, а через интервал времени mΔt повторяется цикл настройки закона точного управления с использованием текущих и заданных данных по широте и долготе. В случае перехода на новое направление движения судна. При выполнении условия |ПУ-φзд|>C1 отключается точное управление и включается штатное управление, которое затем перестраивается на точное управление, если выполняется условие |ПУ-φзд|≤C.
Реализация системы автоматического управления судном по расписанию может быть осуществлена с помощью контроллера или с использованием микросхем типа 140 УД 6 и 140 УД-8.
Система автоматически обеспечивает движение корабля по заданной траектории в двух режимах как при штатном (типовом) режиме управления, так и при точном управлении с использованием информации о широтах и долготах.
Моделирование рассмотренного выше способа автоматического управления движением судна, подтвердило его работоспособность и высокую эффективность использования предложенного способа управления движением судна по расписанию.






Автоматизированная система связи
Способ измерения параметров физических полей верхней полусферы морского объекта
Плавсредство рыбопромысловое для оборудования амфибийных гусеничных машин
Способ управления движением судна по заданной траектории
Устройство для формирования траектории перевода судна на новый курс
Способ управления движением судна с компенсацией медленно меняющихся возмущений
Холодильно-технологический комплекс для предварительного охлаждения и временного хранения рыбы
Способ автоматического управления движением судна с учетом волнения
Способ отказоустойчивого управления движением корабля по глубине
Устройство для формирования траектории перевода судна на параллельный курс с соблюдением ограничений на диапазон изменения сигнала управления
Автоматизированная система связи
Способ измерения параметров физических полей верхней полусферы морского объекта
Плавсредство рыбопромысловое для оборудования амфибийных гусеничных машин
Способ управления движением судна по заданной траектории
Устройство для формирования траектории перевода судна на новый курс
Способ управления движением судна с компенсацией медленно меняющихся возмущений
Холодильно-технологический комплекс для предварительного охлаждения и временного хранения рыбы
Способ автоматического управления движением судна с учетом волнения
Способ отказоустойчивого управления движением корабля по глубине
Устройство для формирования траектории перевода судна на параллельный курс с соблюдением ограничений на диапазон изменения сигнала управления

