Результат интеллектуальной деятельности: СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С УСТРОЙСТВОМ ДЛЯ ФУНКЦИОНИРОВАНИЯ МНОГОЗОНДОВОГО ДАТЧИКА
Вид РИД
Изобретение
Изобретение относится к области сканирующей зондовой микроскопии, а более конкретно к устройствам, обеспечивающим наблюдение, измерение и модификацию поверхности объекта в многозондовом режиме функционирования.
Известен сканирующий зондовый микроскоп с устройством для функционирования многозондового датчика, включающий платформу, держатель образца с образцом, установленные на сканирующем устройстве, сопряженном с платформой, блок сближения, систему регистрации, состоящую из источника излучения и фотоприемника, многозондовый датчик контурного типа, содержащий основание с гибкими консолями, остриями и первый установочный модуль, закрепленный посредством второго установочного модуля на захвате, сопряженным с приводом вращения, соединенным с платформой, а также блок управления [1]. Это устройство выбрано в качестве прототипа предложенного решения.
Недостаток этого устройства заключается в низких функциональных возможностях, связанных с невозможностью автоматической установки многозондового датчика в рабочее положение.
Технический результат предлагаемого изобретения заключается в расширении функциональных возможностей использования устройства.
Указанный технический результат достигается тем, что в сканирующий зондовый микроскоп с устройством для функционирования многозондового датчика, включающий платформу (1), держатель образца (2) с образцом (3), установленные на сканирующем устройстве (4), сопряженном с платформой (1), блок сближения (5), систему регистрации (6), состоящую из источника излучения (7) и фотоприемника (8), многозондовый датчик контурного типа (9), содержащий основание (10) с гибкими консолями (15), остриями (16, 17) и первый установочный модуль (18), закрепленный посредством второго установочного модуля (19) на захвате (20), сопряженном с приводом вращения (21), соединенным с платформой (1), а также блок управления (30) введен модуль ориентации по углу (25), сопряженный с захватом (20).
Существует вариант, в котором первый установочный модуль (18) включает магнитный захват, а второй установочный модуль (19) выполнен в виде магнитной системы, расположенной с возможностью взаимодействия с магнитным захватом первого установочного модуля (18).
Существует также варианты, в которых магнитная система включает: по меньшей мере, один первый постоянный магнит (35), или, по меньшей мере, один первый соленоид (40), по меньшей мере, один второй постоянный магнит (41) и один первый соленоид (40).
Существует также вариант, в котором первый соленоид (40) имеет возможность изменения полярности магнитного поля.
Существует также вариант, в котором второй установочный модуль (19) содержит базовые элементы (45), первый установочный модуль (18) содержит установочные элементы (46), сопряженные с базовыми элементами (45).
Существует также вариант, в котором базовые элементы (45) выполнены в виде, по меньшей мере, двух первых отверстий (50), а установочные элементы (46) - в виде, по меньшей мере, двух первых штырей (51).
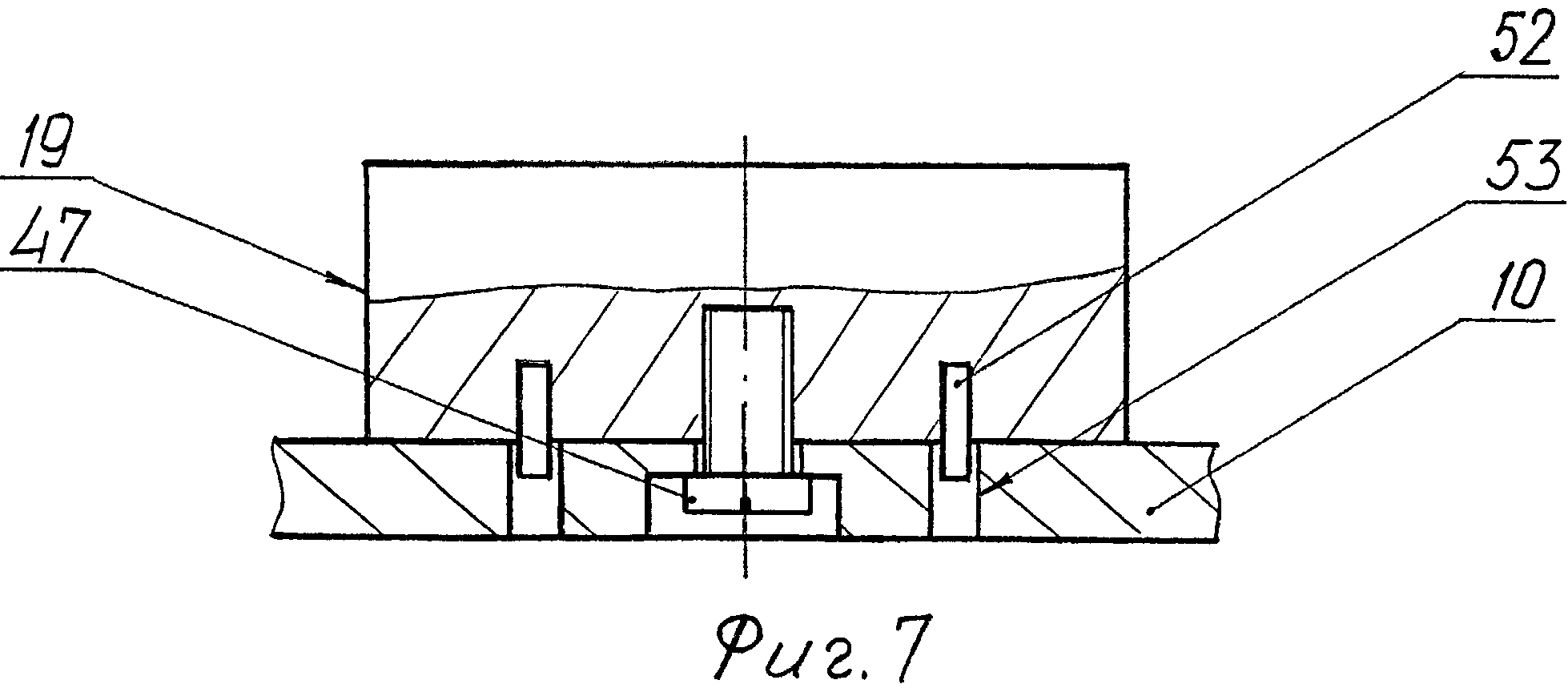
Существует также вариант, в котором базовые элементы (45) выполнены в виде, по меньшей мере, двух вторых штырей (52), а установочные элементы (46) в виде, по меньшей мере, двух вторых отверстий (53).
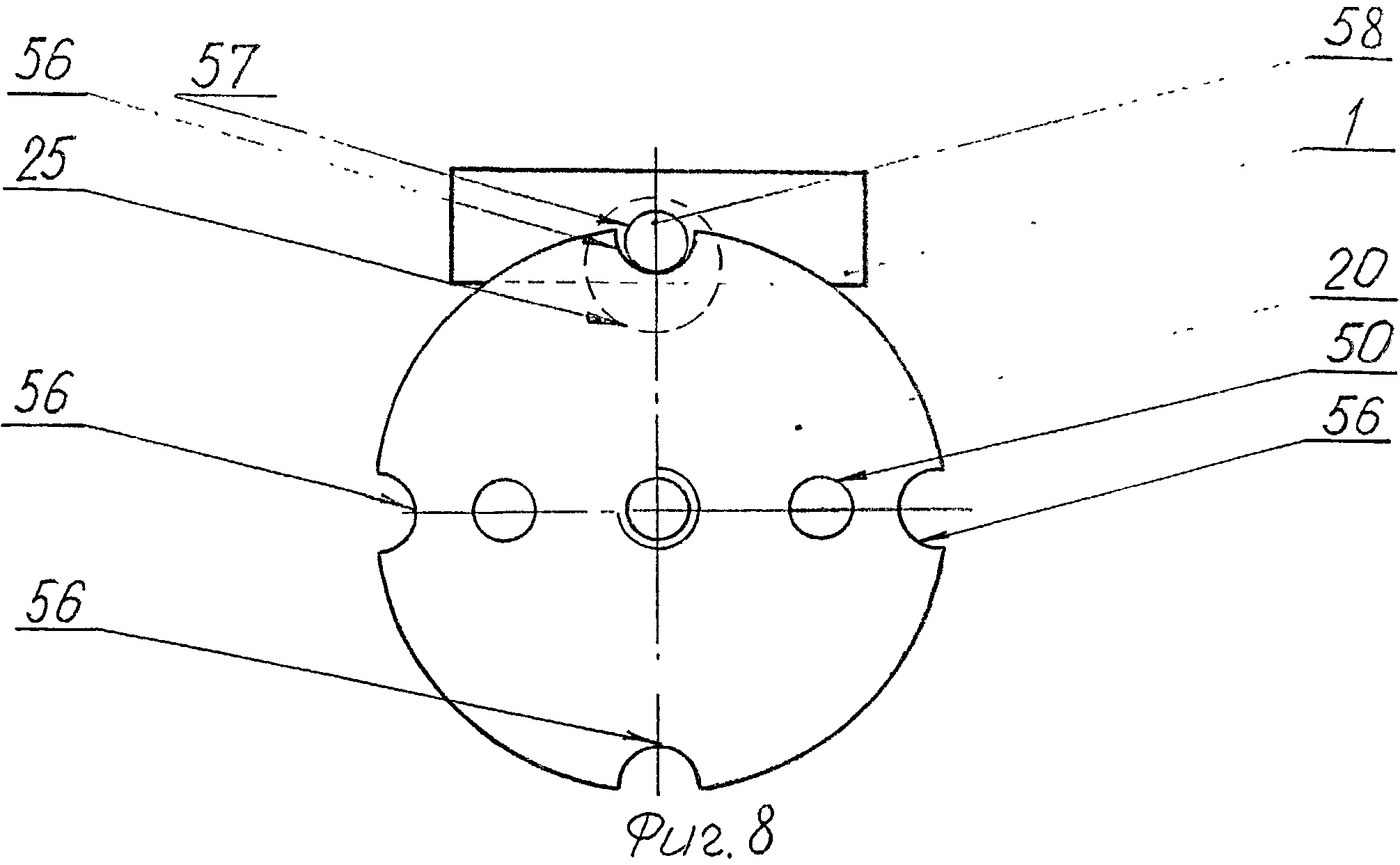
Существует также вариант, в котором модуль ориентации по углу (30) выполнен в виде выборок (56), расположенных по внешнему контуру захвата (20) и первого пружинного элемента (57), расположенного на платформе (1) с возможностью взаимодействия с выборками (56), при этом количество выборок (56) равно числу зондов (16, 17).
Существуют также варианты, в которых первый пружинный элемент (57) выполнен в виде стержня 58, или в виде плоской пружины (59), соединенной с упором (60).
Существует также вариант, в котором модуль ориентации по углу (25) выполнен в виде конических выборок (61), расположенных по радиусу в захвате (20), количество которых равно числу зондов (16, 17) и второго пружинного элемента (62), расположенного на платформе (1) с возможностью взаимодействия с выборками (61).
Существует также вариант, в котором в устройство введен передаточный механизм (23).
Существуют также варианты, в которых передаточный механизм (23) выполнен: в виде гибкого вала (65), расположенного в пустотелом ограничителе (66), закрепленном на платформе (1), или в виде зубчатой передачи (69), или в виде карданной передачи (75).
Существует также вариант, в котором в устройство введена загрузочная каретка (81), включающая второй соленоид (87), подвижно установленная на платформе (1) с возможностью сопряжения с захватом (20) и имеющая установочное место для многозондового датчика контурного типа (9).
Существует также вариант, в котором в устройство введен модуль восстановления зондов (90), установленный на платформе (1) с возможностью взаимодействия с остриями (16, 17).
Существует также вариант, в котором модуль восстановления зондов (90) включает блок подачи очищенного газа (92).
Существуют также варианты, в которых модуль восстановления зондов (90) выполнен в виде лазерного модуля (99), и (или) плазменного модуля (104), и (или) электронно-лучевого модуля (109), и(или) электростатического модуля.
Существуют также варианты, в которых модуль восстановления зондов (90) выполнен в виде магнитного модуля.
Существует также вариант, в котором в качестве магнитного модуля используют магнитную систему второго установочного модуля (19).
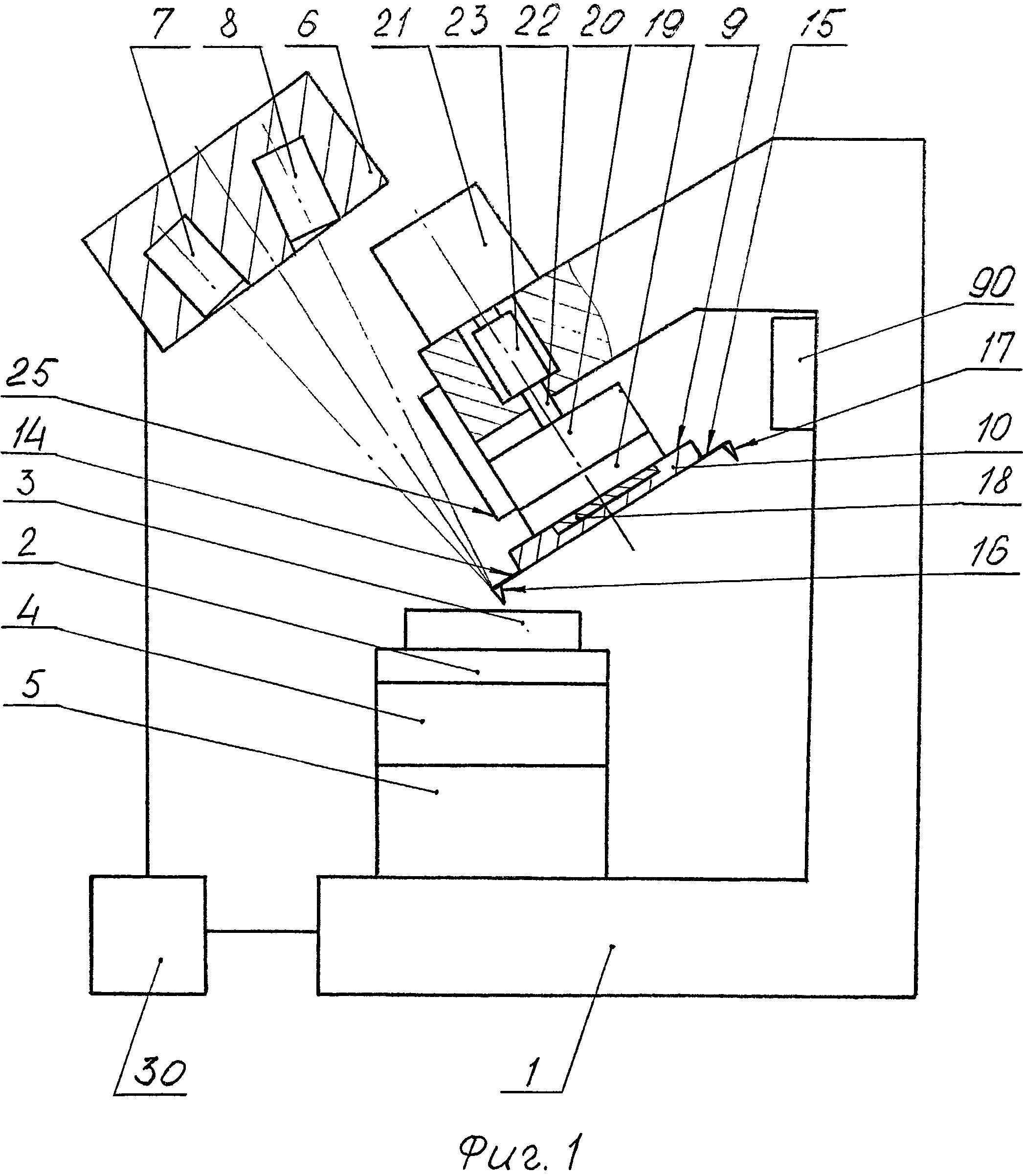
На фиг.1 изображена компоновочная схема сканирующего зондового микроскопа с устройством для функционирования многозондового датчика.
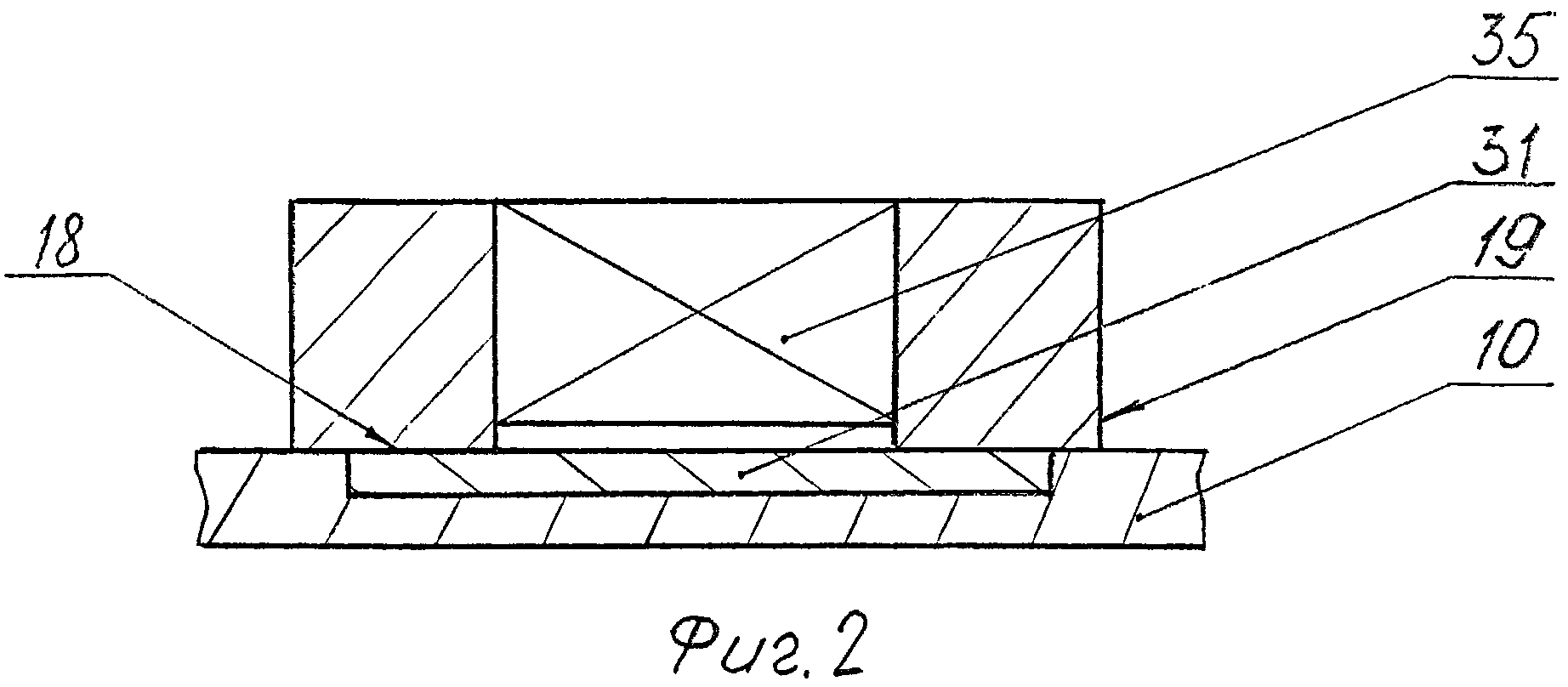
На фиг.2 изображен первый установочный модуль, сопряженный со вторым установочным модулем, включающим постоянный магнит.
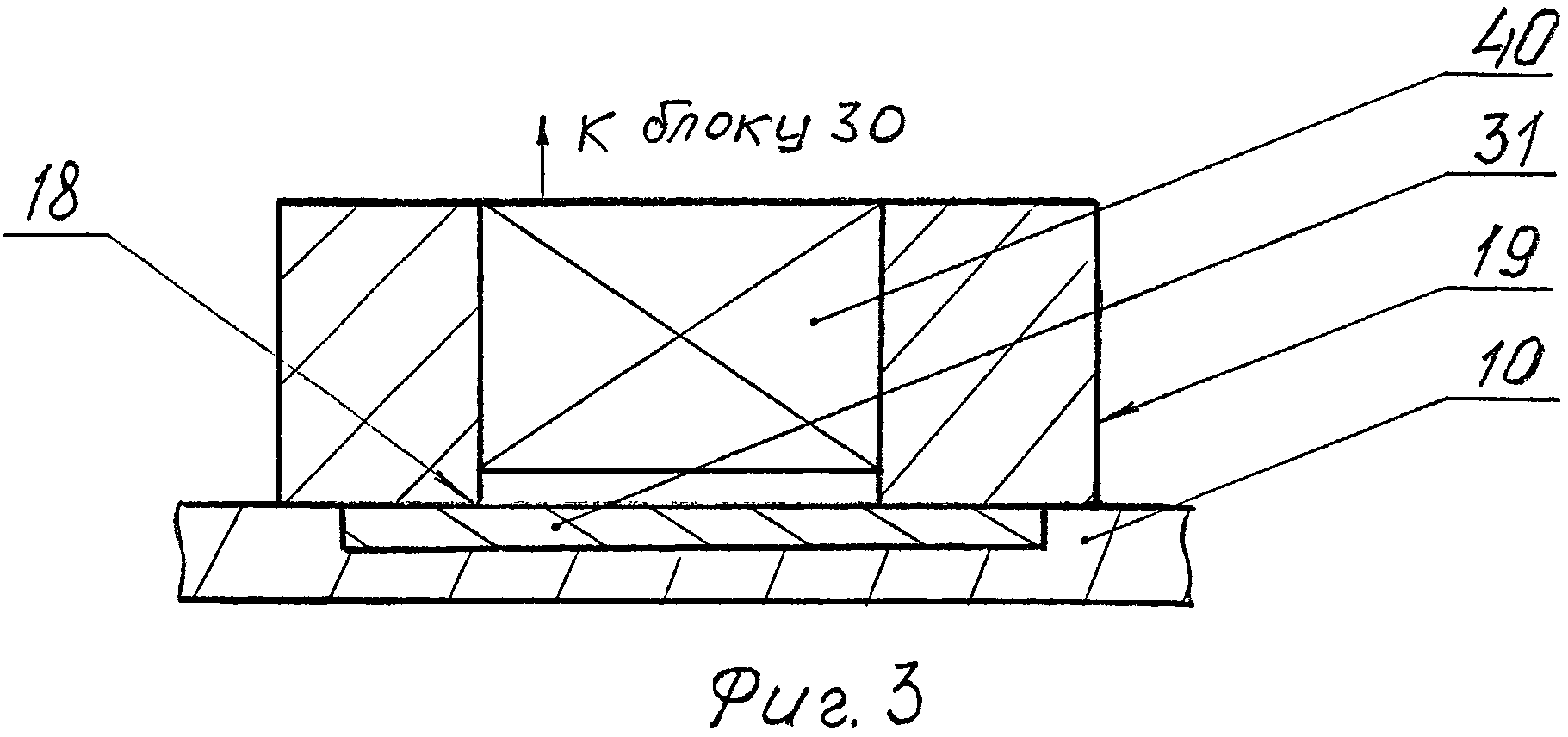
На фиг.3 изображен первый установочный модуль, сопряженный со вторым установочным модулем, включающим первый соленоид.
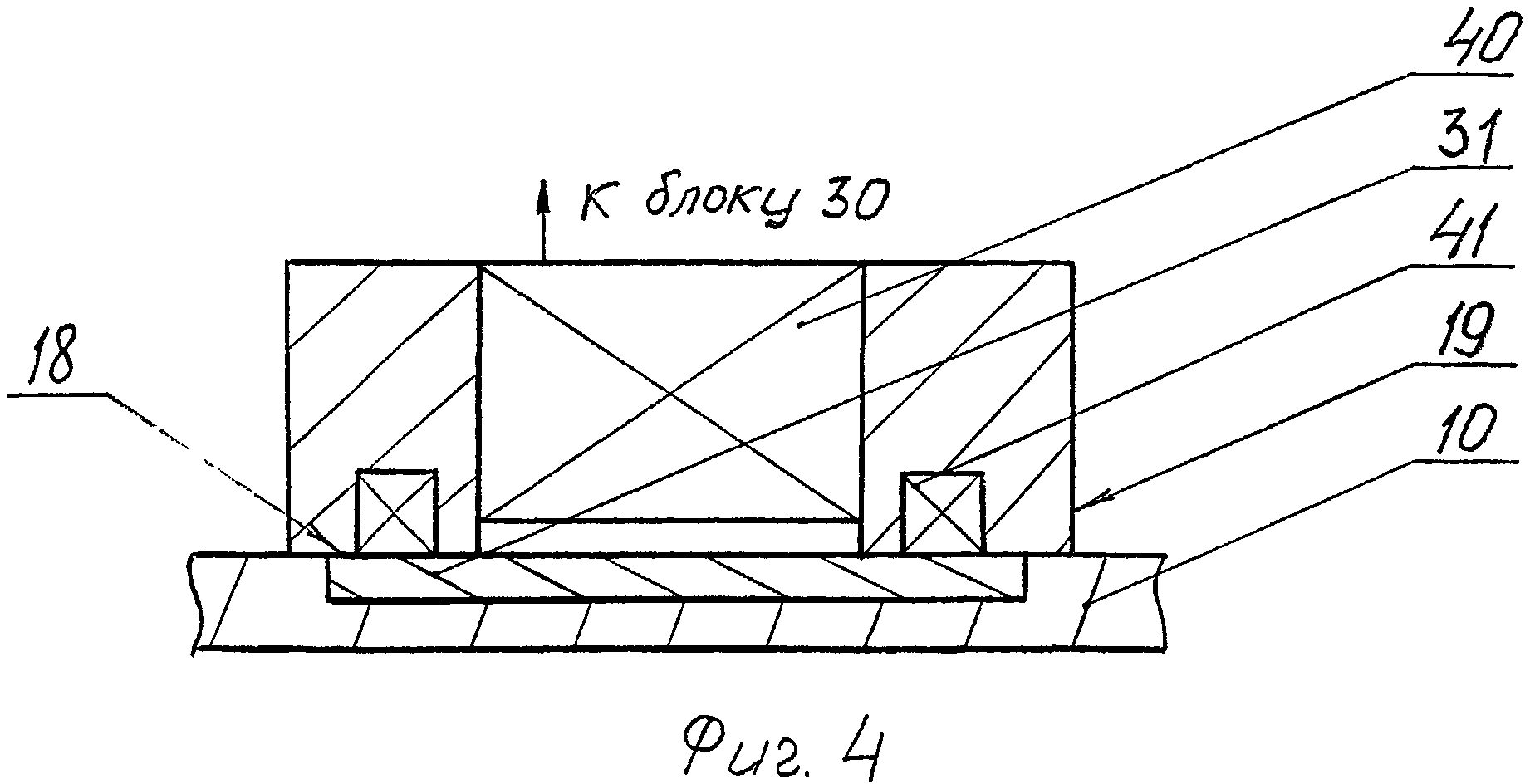
На фиг.4 изображен первый установочный модуль, сопряженный со вторым установочным модулем, включающим постоянный магнит и соленоид.
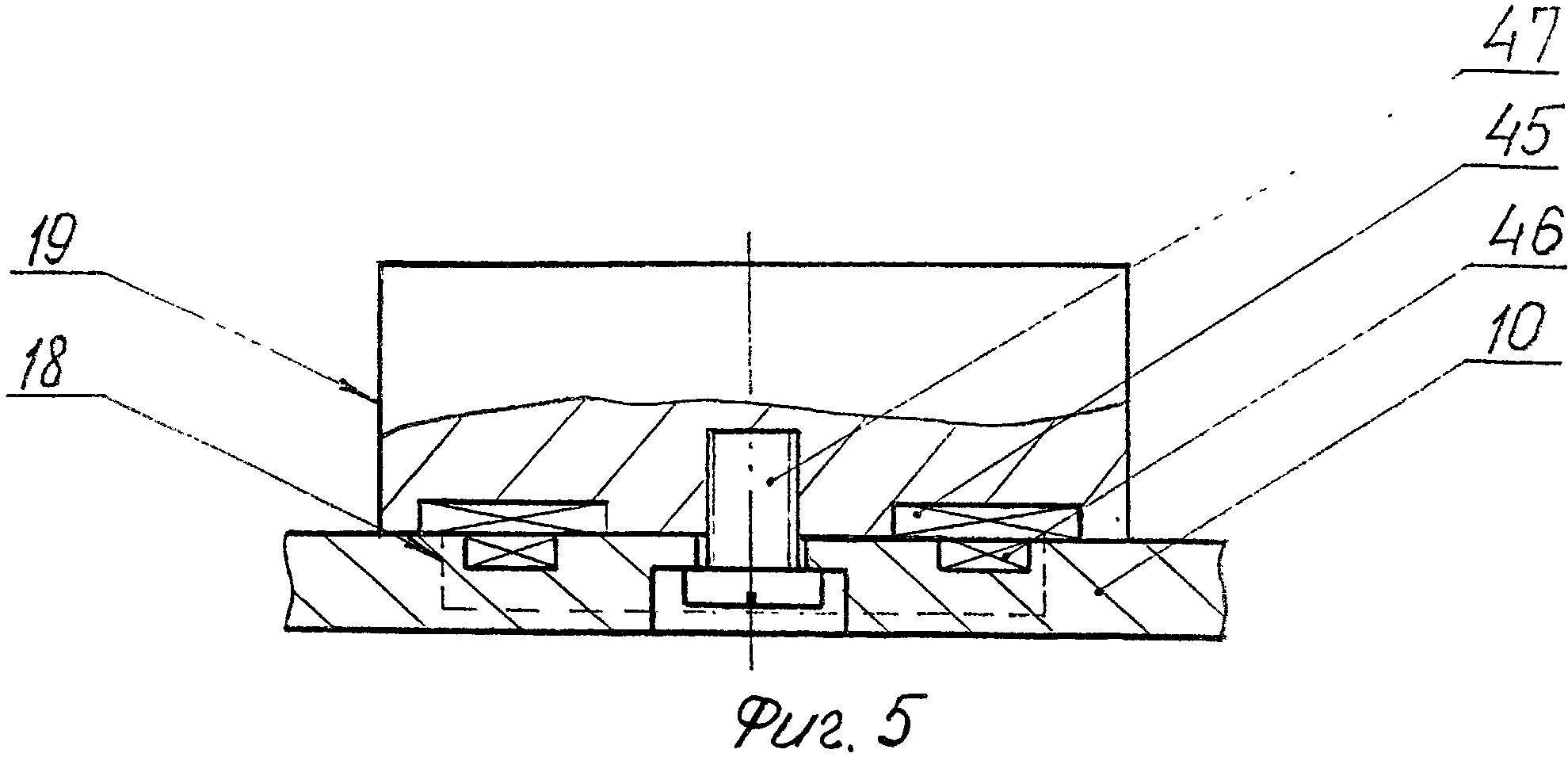
На фиг.5, фиг.6, фиг.7 изображены первый установочный модуль, сопряженный со вторым установочным модулем, включающими базовые и установочные элементы.
На фиг.8 изображен модуль ориентации по углу, включающий выборки и первый пружинный элемент круглого сечения.
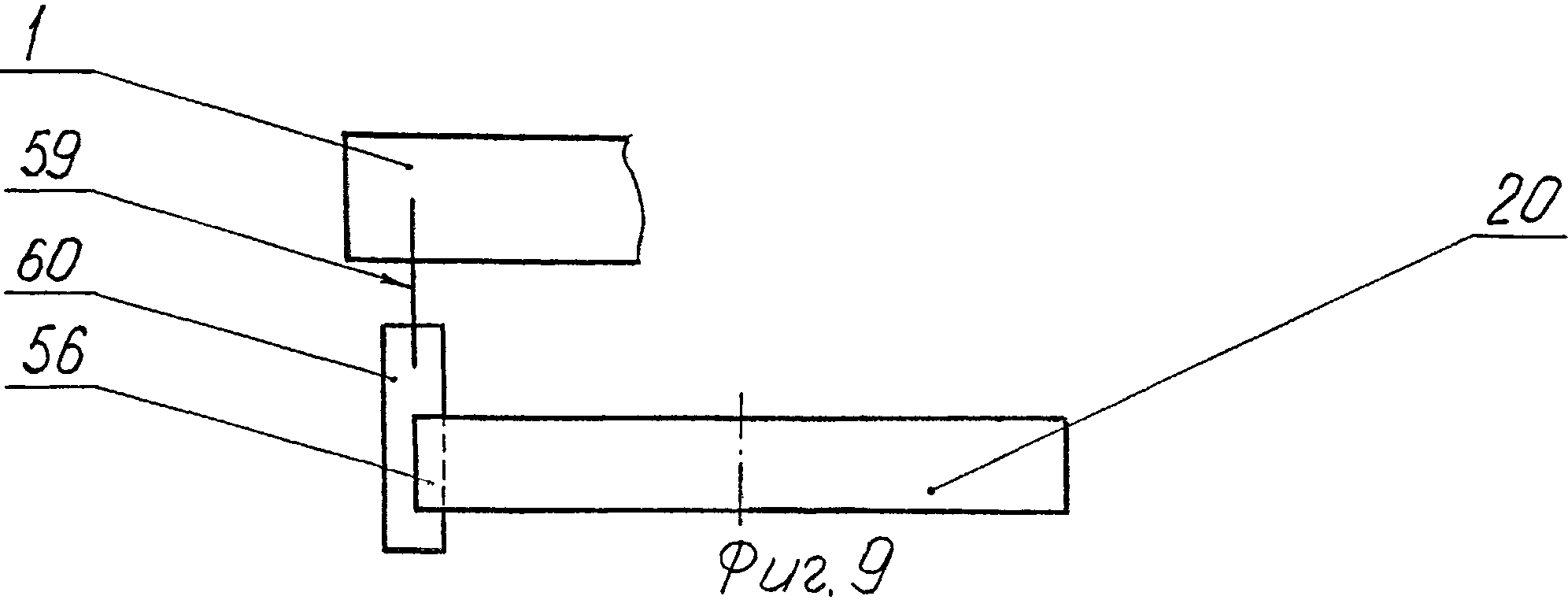
На фиг.9 изображен модуль ориентации по углу, включающий выборки и первый пружинный элемент с плоской пружиной.
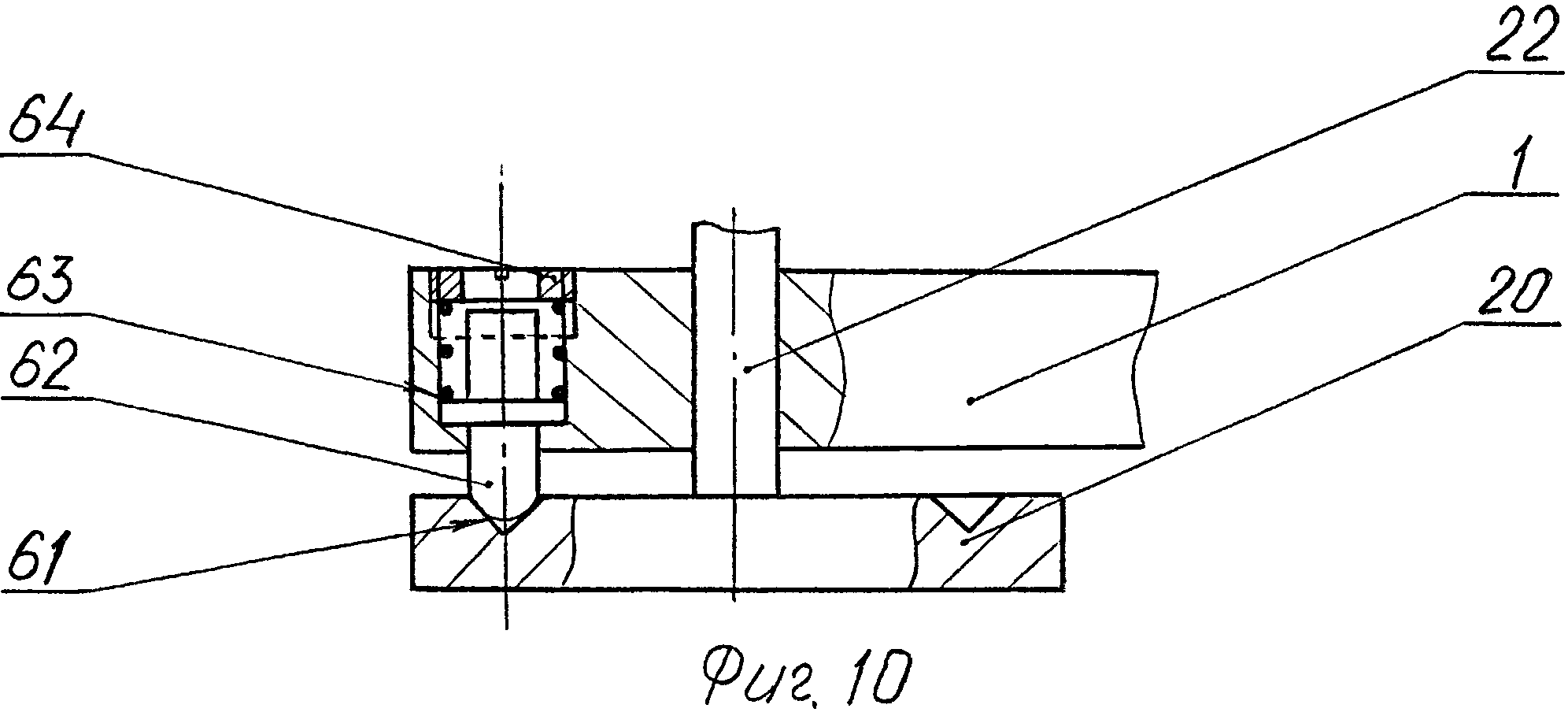
На фиг.10 изображен модуль ориентации по углу, включающий отверстия и второй пружинный элемент
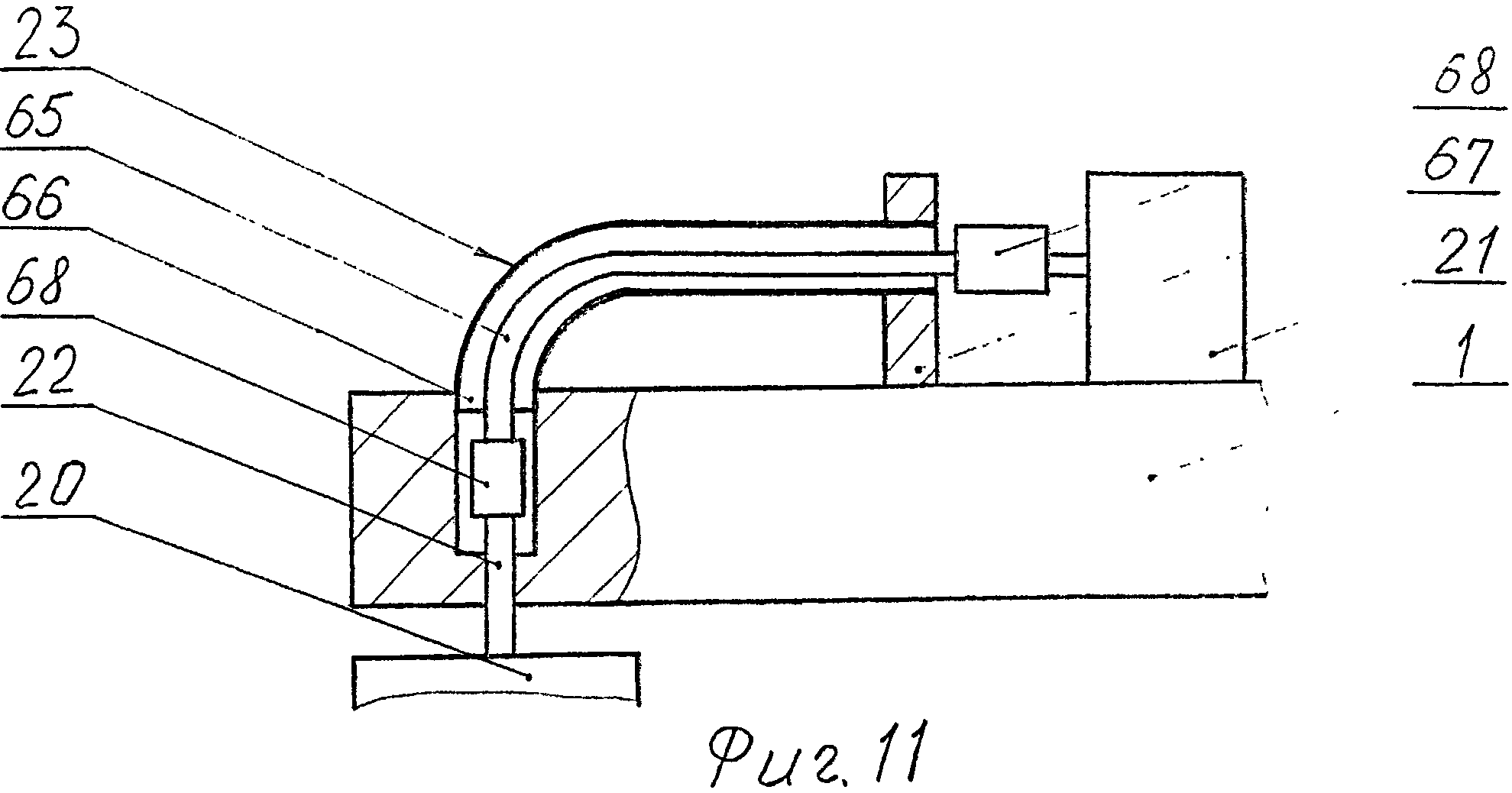
На фиг.11 изображен передаточный механизм, выполненный в виде гибкого вала.
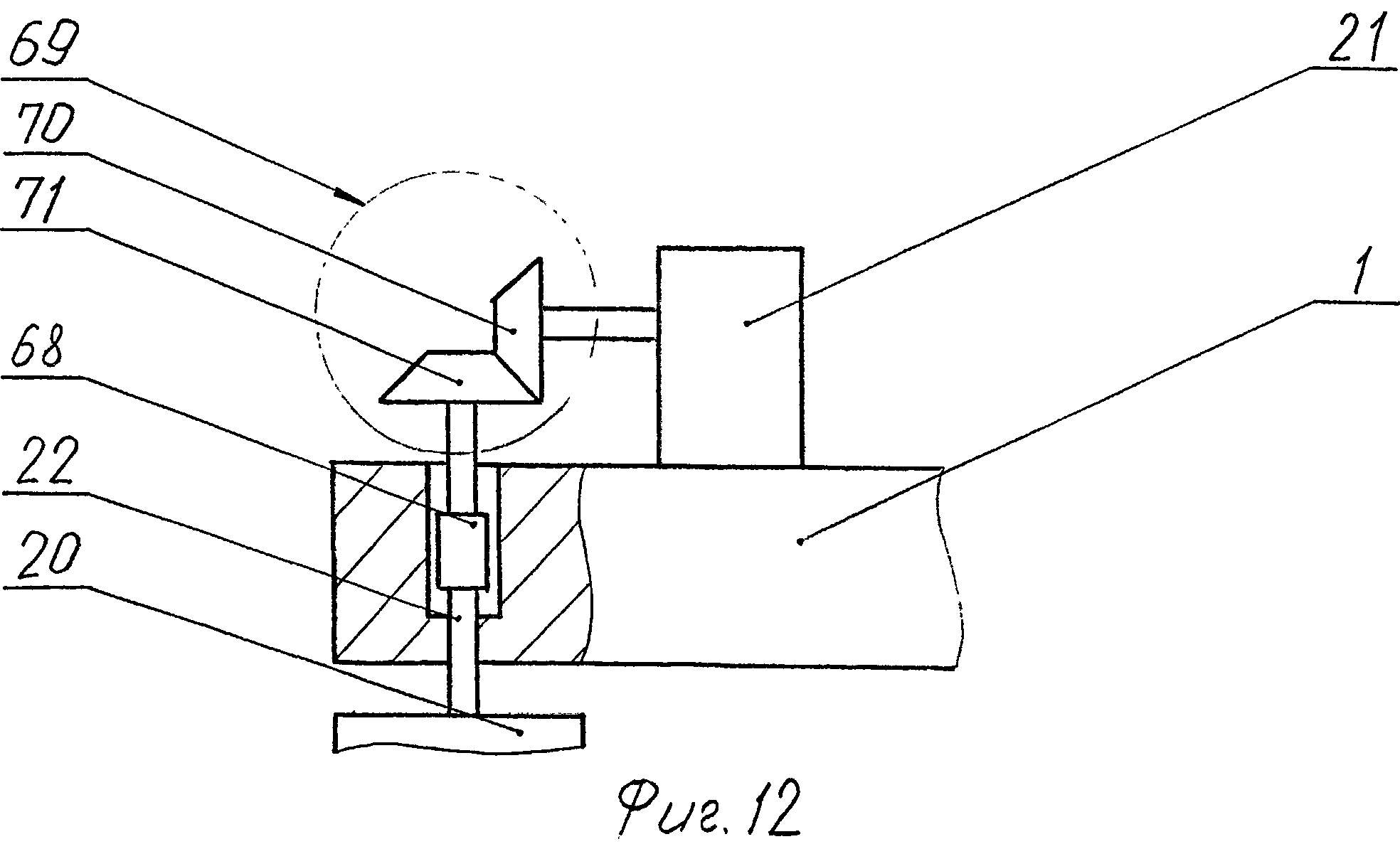
На фиг.12 изображен передаточный механизм, выполненный в виде зубчатой передачи.
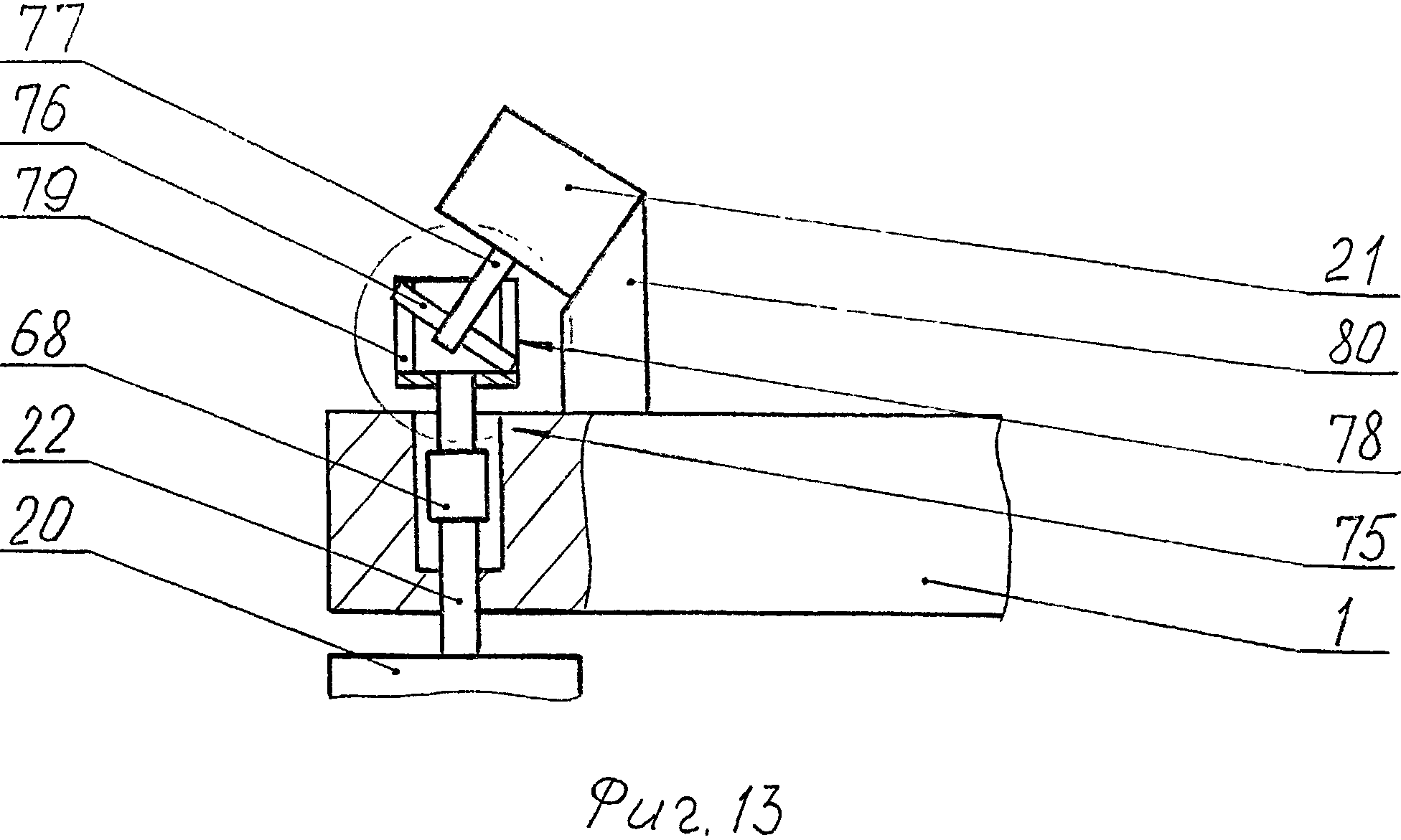
На фиг.13 изображен передаточный механизм, выполненный в виде карданной передачи.
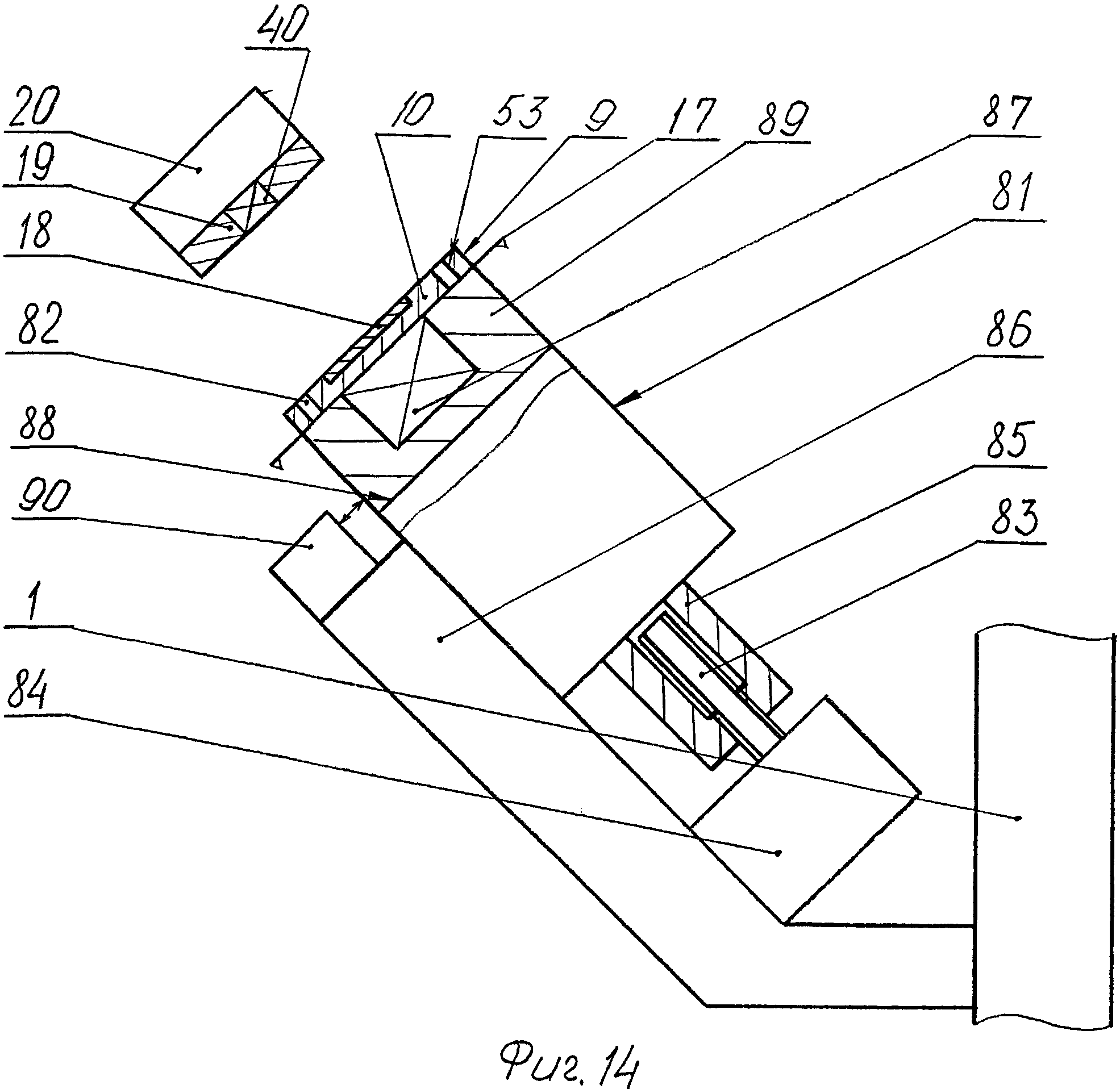
На фиг.14 изображена загрузочная каретка.
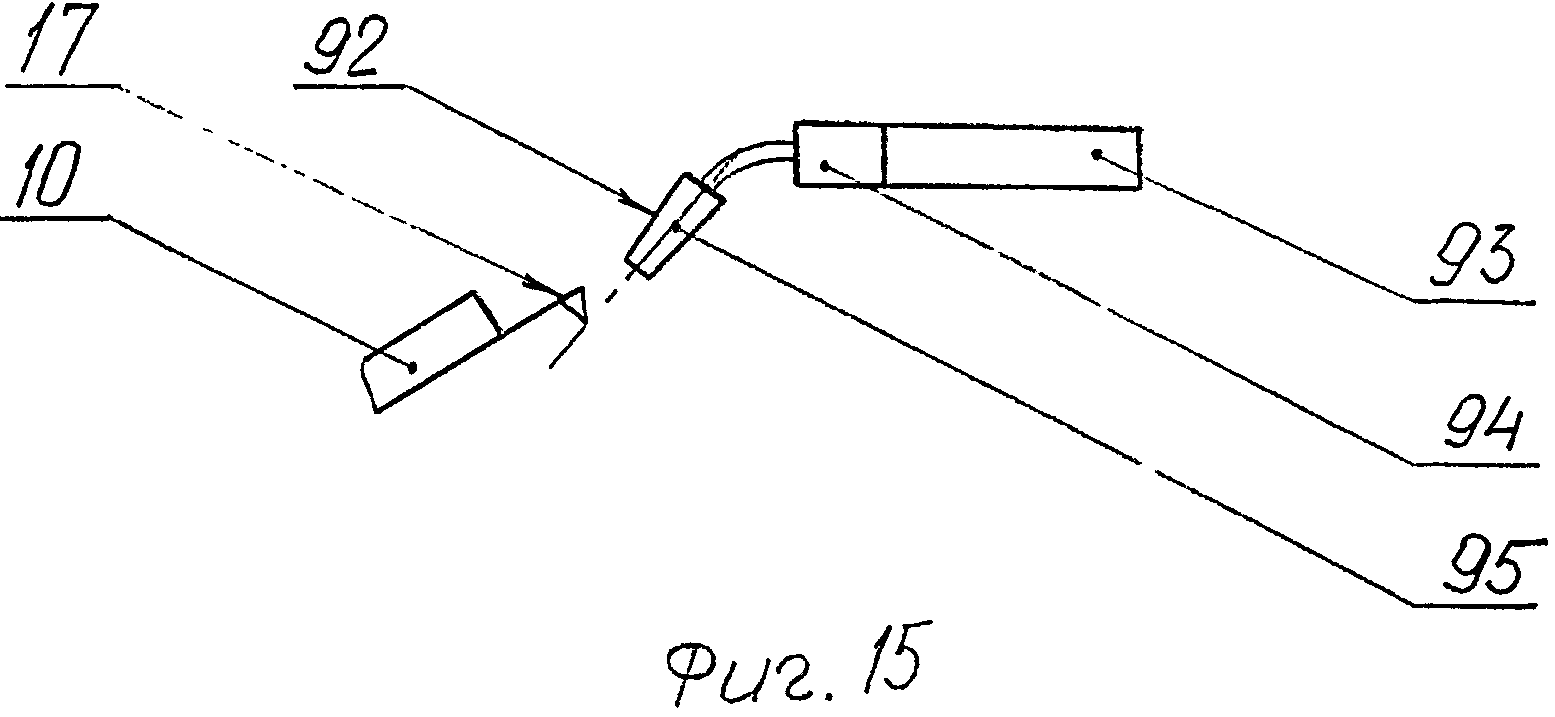
На фиг.15 изображен модуль восстановления зондов, выполненный в виде блока подачи очищенного газа.
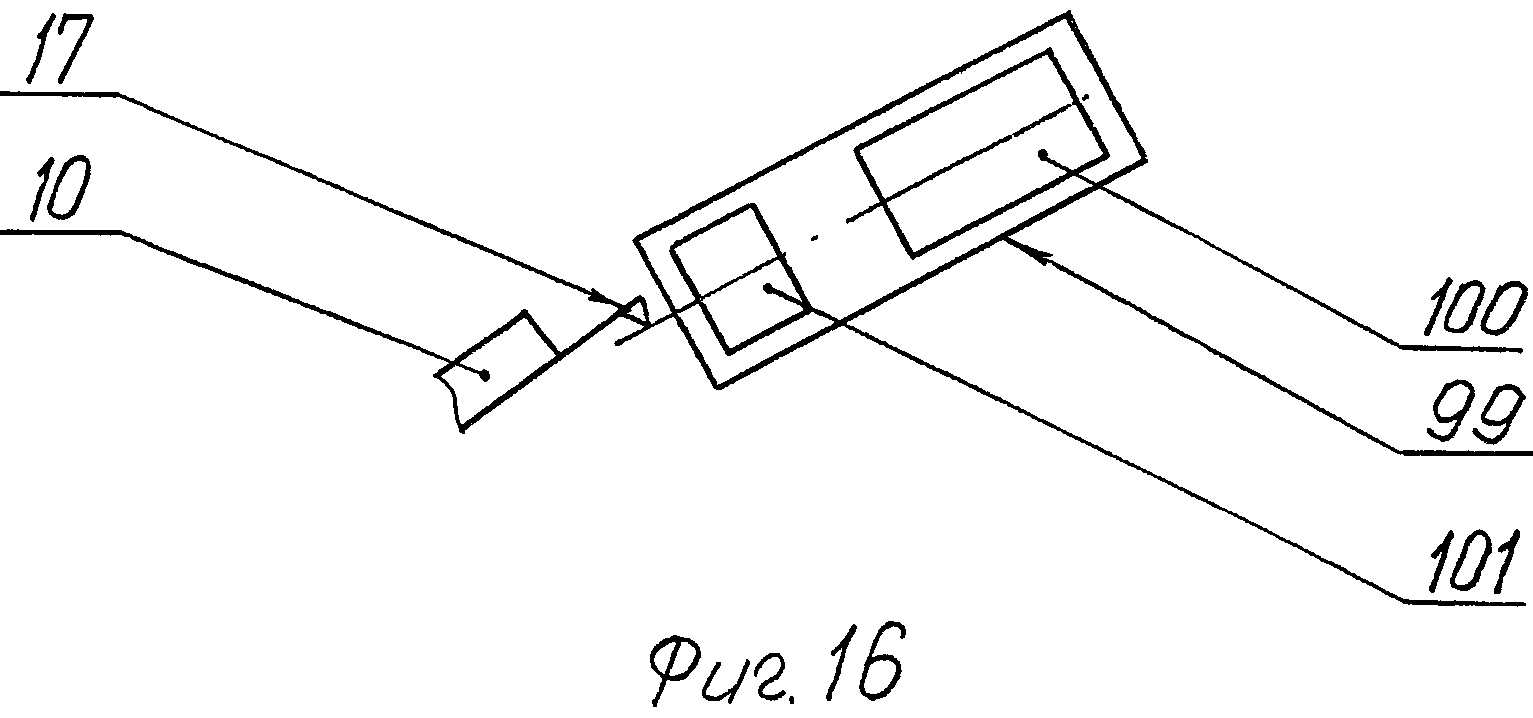
На фиг.16 изображен модуль восстановления зондов, выполненный в виде лазерного модуля.
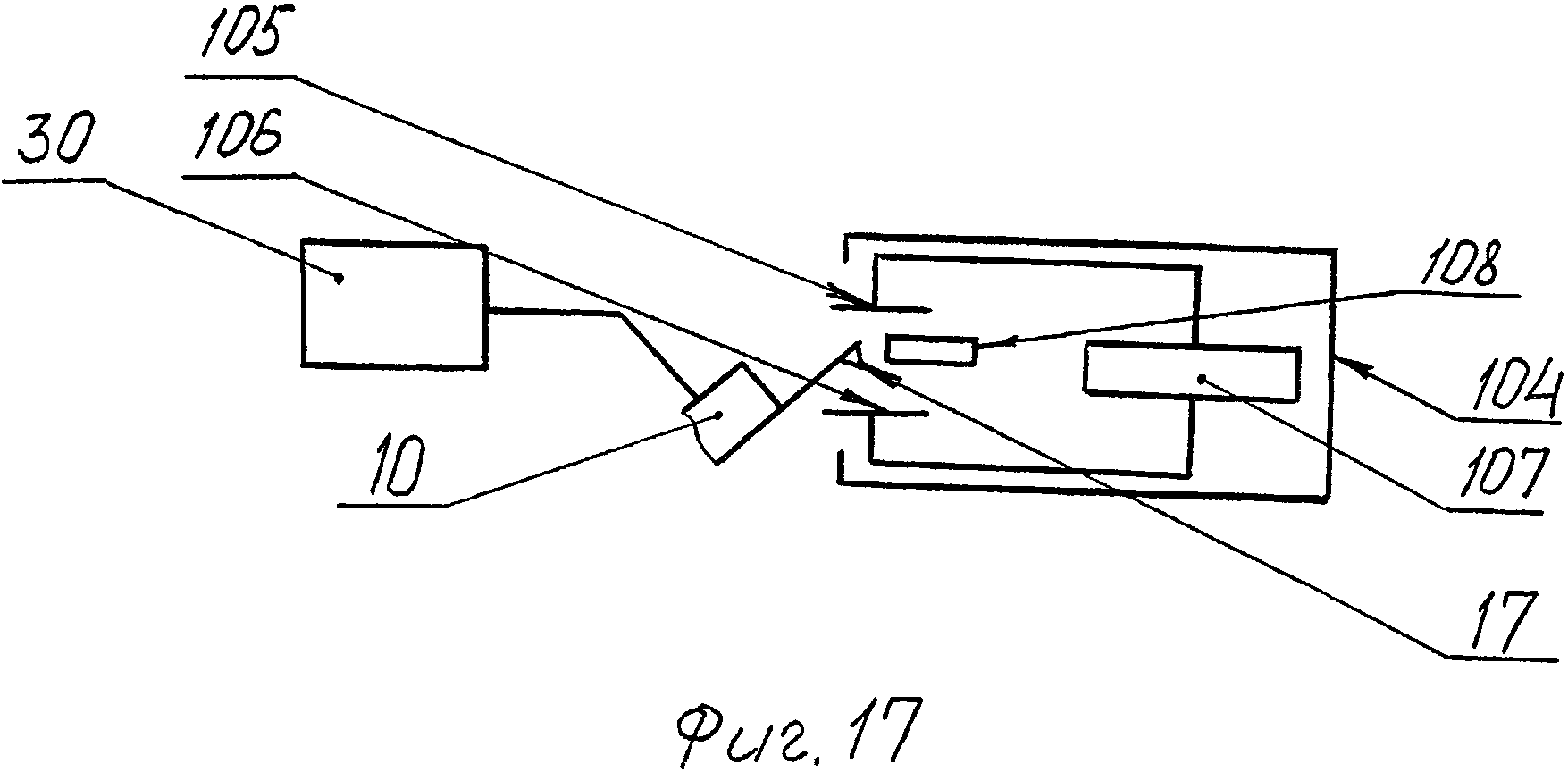
На фиг.17 изображен модуль восстановления зондов, выполненный в виде плазменного модуля, или электростатического модуля, или магнитного модуля.
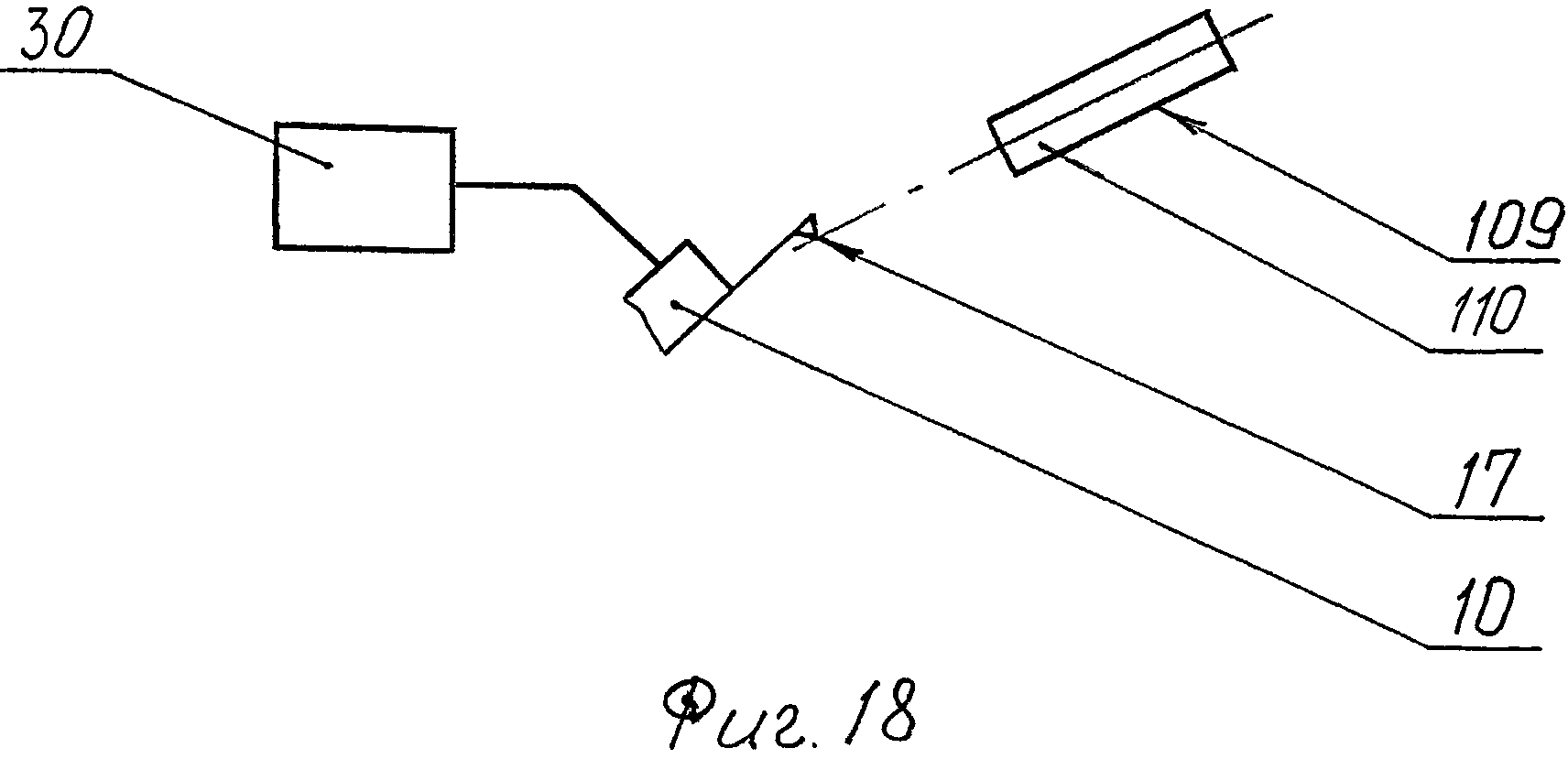
На фиг.18 изображен модуль восстановления зондов, выполненный в виде электронно-лучевого модуля.
Сканирующий зондовый микроскоп с устройством для функционирования многозондового датчика включает платформу 1 (фиг.1), держатель образца 2 с образцом 3, установленные на сканирующем устройстве 4. В одном из вариантов сканирующее устройство 4 может быть закреплено на блоке сближения 5, расположенном на платформе 1. Система регистрации 6 состоит из источника излучения 7 и фотоприемника 8. Многозондовый датчик контурного типа 9 содержит основание 10 с гибкими консолями 14, 15 и остриями 16, 17. Количество консолей и острий на одном многозондовом датчике может более 20-ти. Зоны гибких консолей 14, 15, расположенные над остриями 16, 17 выполнены зеркальными и оптически сопряжены с источником излучения 7 и фотоприемником 8. Основание 10 многозондового датчика контурного типа 9 включает первый установочный модуль 18, которым оно может быть закреплено на захвате 20 посредством второго установочного модуля 19. Захват 20 сопряжен с приводом вращения 21, закрепленным на платформе 1. Соединение захвата 20 с приводом вращения 21 может быть осуществлено посредством вала 22 и передаточного механизма 23. Захват 20 имеет сопряжение с платформой 1 посредством модуля ориентации по углу 25. Вал 22 может быть установлен в платформе 1 по скользящей посадке, или с помощью подшипника (не показан). Все электронные модули устройства подсоединены к блоку управления 30. В простейшем случае модуль ориентации по углу 25 может быть выполнен в виде микроскопа или видеосистемы в которых сформированы реперные точки, например, два Г-образных уголка, между которыми устанавливают гибкие консоли 14 и 15, а точнее их изображения.
В одном из вариантов первый установочный модуль 18 включает магнитный захват, выполненный в виде вставки 31 (фиг.2), например, из сплава самарий-кобальт, при этом, второй установочный модуль 19 может быть изготовлен в виде магнитной системы, состоящей в простейшем случае из первого постоянного магнита 35, расположенного с возможностью взаимодействия со вставкой 31 первого установочного модуля 18. Следует заметить, что магнитный захват первого установочного модуля 18 может быть выполнен в виде ферромагнитной пленки, например, никеля (не показано).
В другом варианте магнитная система второго установочного модуля 18 (фиг.3) может включать, по меньшей мере, один первый соленоид 40, подключенный к блоку управления 30.
Существует вариант, в котором магнитная система первого установочного модуля 18 включает, по меньшей мере, один второй постоянный магнит 41 (фиг.4), например, кольцевой формы и один первый соленоид 40. Могут быть и другие варианты выполнения магнитной системы в этом случае, например, в виде набора отдельных магнитов. При этом соленоид 40 имеет возможность изменения полярности магнитного поля.
Существует также вариант, в котором второй установочный модуль 19 (фиг.5) содержит базовые элементы 45, а первый установочный модуль 18 содержит установочные элементы 46, сопряженные с базовыми элементами 45 и винт 47, находящийся во взаимодействии с первым установочным модулем 18.
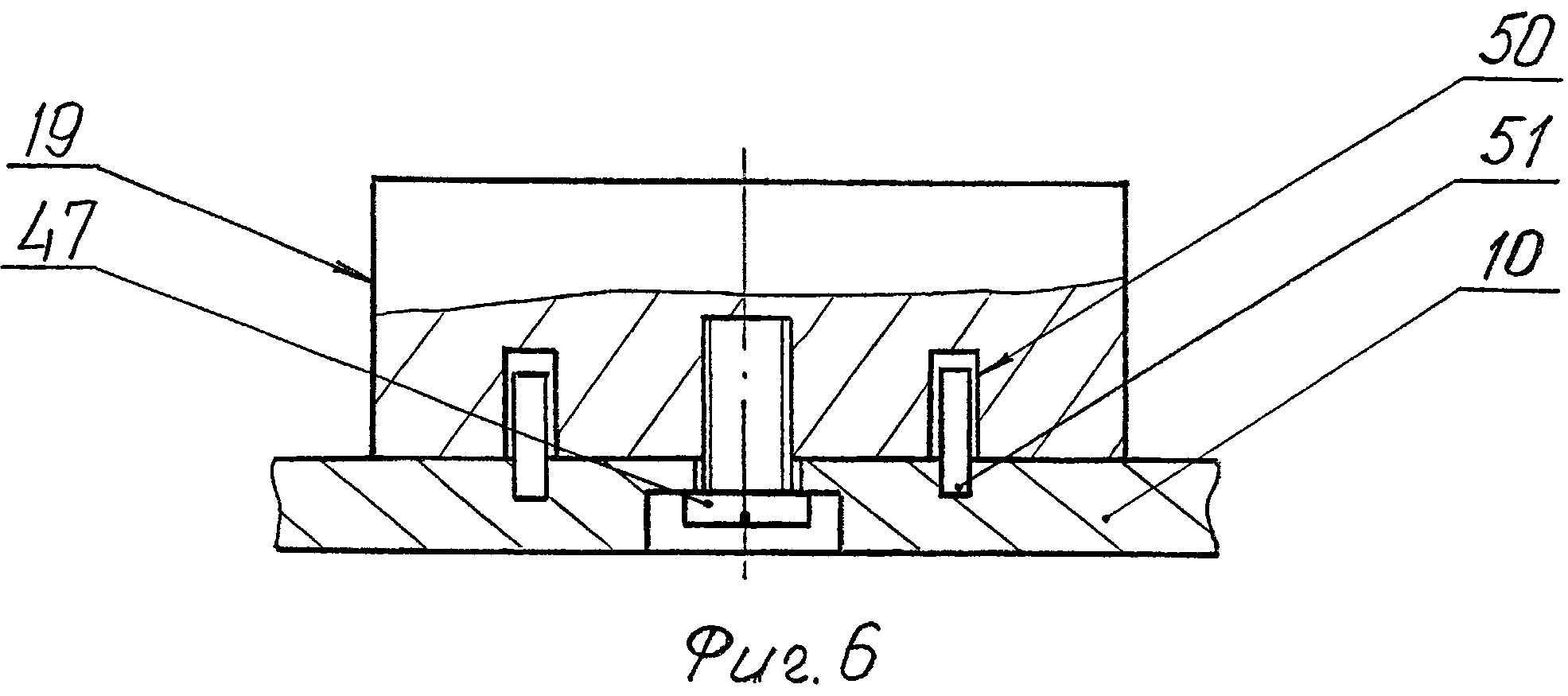
В одном из вариантов базовые элементы 45 выполнены в виде, по меньшей мере, двух первых отверстий 50 (фиг.6), а установочные элементы 46 - в виде, по меньшей мере, двух первых штырей 51.
В другом варианте базовые элементы 45 (фиг.7) выполнены в виде, по меньшей мере, двух вторых штырей 52, а установочные элементы 46 в виде, по меньшей мере, двух вторых отверстий 53. Величины зазоров между штырями 51, 52 и отверстиями 50, 53 будут определять погрешность установки многозондового датчика контурного типа 9 в рабочее положение.
Существует вариант, в котором модуль ориентации по углу 25 (фиг.8) выполнен в виде выборок 56, расположенных по внешнему контуру захвата 20. Количество выборок 56 равно числу острий 16, 17. При этом модуль 25 включает первый пружинный элемент 57, установленный на платформе 1 с возможностью взаимодействия с выборками 56.
В одном варианте первый пружинный элемент 57 выполнен в виде стержня 58 круглого сечения.
В другом варианте первый пружинный элемент 57 выполнен в виде плоской пружины 59 (фиг.9), соединенной, например, с цилиндрическим упором 60. Стержень 58 и плоская пружина 59 могут быть изготовлены из бериллиевой или оловянистой бронзы.
Существует также вариант, в котором модуль ориентации по углу 25 (фиг.10) выполнен в виде конусных выборок 61 (согласно числу острий 16, 17), расположенных по радиусу в захвате 20, и второго пружинного элемента 62, установленного на платформе 1 с возможностью взаимодействия с выборками 61. Второй пружинный элемент 62 может быть сопряжен с пружиной 63, степень сжатия которой можно регулировать гайкой 64.
В простейшем варианте для передачи вращения от привода 21 на многозондовый датчик контурного типа 9 через захват 20 используется передаточный механизм 23, выполненный в виде муфты (см. фиг.1). Однако из-за габаритных ограничений такую схему не всегда удается использовать. Для того, чтобы упростить оптический доступ системы регистрации 6 к гибким консолям 14, 15 привод вращения 21 необходимо выводить из зоны этого доступа.
В одном из вариантов передаточный механизм 23 может быть выполнен в виде гибкого вала 65 (фиг.11), расположенного в пустотелом ограничителе 66, закрепленным на платформе 1 посредством переходника 67. Гибкий вал 65 соединен с приводом 21 и валом 22 захвата 20 переходниками 68.
Во втором варианте передаточный механизм 23 выполнен в виде зубчатой передачи 69 (фиг.12), состоящей из двух конический шестеренок 70 и 71.
В третьем варианте передаточный механизм 23 выполнен в виде карданной передачи 75 (фиг.13), включающей штифт 76, закрепленный на валу 77 привода вращения 21, сопряженный с разрезной втулкой 78 посредством пазов 79. Привод 21 может быть закреплен на платформе 1 посредством углового кронштейна 80.
Существует также вариант, в котором в устройство введена загрузочная каретка 81 (фиг.14), подвижно установленная на платформе 1 с возможностью сопряжения с захватом 20 и имеющая установочное место для многозондового датчика контурного типа 9. Установочное место может включать штифты 82, сопряженные со вторыми отверстиями 53 основания 10. Каретка 81 может быть сопряжена с винтовым валом 83 первого привода 84 посредством резьбового отверстия кронштейна 85. Каретка 81 установлена на платформе 1 посредством первых линейных направляющих 86 (подробно не показаны). В одном из вариантов в каретке 81 может быть установлен второй соленоид 87. В частном случае каретка 81 может содержать вторые линейные направляющие 88, по которым может перемещаться ее фрагмент 89, сопряженный со вторым приводом 90. Второй привод 90 может быть сопряжен со вторым приводом 90 аналогично сопряжению первого привода 84 с кареткой 81.
Существует также вариант, в котором в устройство введен модуль восстановления зондов 90 (фиг.1), установленный на платформе 1 с возможностью взаимодействия с остриями 16, 17.
В одном из вариантов модуль восстановления зондов 90 включает блок подачи очищенного газа 92, например, азота (фиг.15), содержащий газовый баллон 93, натекатель 94 и форсунку 95.
В других вариантах модуль восстановления зондов 90 выполнен в виде лазерного модуля 99 (фиг.16), и(или) плазменного модуля 104 (фиг.17), и(или) электроннолучевого модуля 109 (фиг.18), и(или) электростатического модуля (фиг.17), и(или) магнитного модуля (фиг.17).
В качестве лазерного модуля 99 может использоваться гольмиевый лазер 100 с мощностью до 100 Вт, сопряженный посредством оптической системы 101 (фиг.16) с острием 17. В вакуумном исполнении в качестве модуля восстановления зондов 90 имеется возможность использования плазменного модуля 104, содержащего электроды 105, 106 (фиг.17), подключенные к источнику питания 107. Острие 17 через основание 10 может быть подключено к блоку управления 30. Между электродами 105 и 106 может быть расположен магнитный модуль 108, выполненный в виде постоянного магнита или электромагнита. В вакуумном исполнении в качестве модуля восстановления зондов 90 также имеется возможность использования электронно-лучевого модуля 109, содержащего электронную пушку 110 (фиг.18), сопряженную с острием 17 через основание 10 может быть подключено к блоку управления 30. В качестве электростатического модуля могут использоваться электроды 105, 106 (фиг.17), подключенные к источнику питания 107.
Вариант применения магнитного модуля, помимо использования соленоида в составе плазменного модуля 104 (фиг.14) может быть и таким. Устанавливают многозондовый датчик контурного типа 9 остриями 16 и 17 в сторону захвата 20. Используя привода 84 и 90, подводят, например, острие 16 к первому соленоиду 40 второго установочного модуля 19 и осуществляют восстановление магнитного острия 17.
Устройство работает следующим образом. Закрепляют многозондовый датчик контурного типа 9 на захвате 20 посредством второго установочного модуля 19. Используя блок сближения 5, подводят образец 3 к острию 16 и посредством сканирующего устройства 4 осуществляют сканирование образцом 3 относительно острия 16 и взаимодействие его с образцом 3. После выхода из строя острия 16, или при необходимости изменения режима взаимодействия острия 16 с образцом 3 отводят образец от острия 16, осуществляют поворот многозондового датчика контурного типа 9 до того момента, когда нужное острие будет в положении, изображенном на фиг.1, производят подвод образца 3 к этому острию и повторяют процесс сканирования и взаимодействия острия с образцом 3.
При использовании первого соленоида 40 при одной полярности можно закреплять основание 10 и его сбрасывать.
То, что в устройство введен модуль ориентации по углу (25), сопряженный с захватом (20), повышает точность установки гибких консолей (14, 15) относительно системы регистрации (6), увеличивает соотношение рабочий сигнал - шум и обеспечивает возможность работы в условиях: с повышенными вибрациями, акустическими и электрическими шумами, а также с конвективным тепломассообменом.
То, что первый установочный модуль (18) включает магнитный захват, а второй установочный модуль (19) выполнен в виде магнитной системы, расположенной с возможностью взаимодействия с магнитным захватом первого установочного модуля (18), при этом магнитная система включает, по меньшей мере, один первый постоянный магнит (35) позволяет оперативно заменять многозондовый датчик контурного типа (9), что упрощает эксплуатацию устройства.
То, что магнитная система включает, по меньшей мере, один первый соленоид (40), при этом первый соленоид (40) имеет возможность изменения полярности магнитного поля позволяет осуществлять автоматический сброс использованного многозондового датчика контурного типа (9), что упрощает эксплуатацию устройства.
То, что магнитная система включает, по меньшей мере, один второй постоянный магнит (41) и один первый соленоид (40), при этом первый соленоид (40) имеет возможность изменения полярности магнитного поля позволяет оперативно заменять многозондовый датчик контурного типа (9) и осуществлять автоматический его сброс, что упрощает эксплуатацию устройства.
То, что второй установочный модуль (19) содержит базовые элементы (45), первый установочный модуль (18) содержит установочные элементы (46), сопряженные с базовыми элементами (45) повышает точность установки гибких консолей (14, 15) относительно системы регистрации (6), увеличивает соотношение рабочий сигнал - шум и обеспечивает возможность работы в условиях: с повышенными вибрациями, акустическими и электрическими шумами, а также с конвективным тепломассообменом.
То, что базовые элементы (45), выполнены в виде, по меньшей мере, двух первых отверстий (50), а установочные элементы (46) - в виде, по меньшей мере, двух первых штырей (51), а также, что базовые элементы (45), выполнены в виде, по меньшей мере, двух вторых штырей (52), а установочные элементы (46) в виде, по меньшей мере, двух вторых отверстий (53) помимо точной установки в рабочее положение многозондовых датчиков контурного типа (9), также позволяет упростить их промежуточное хранение.
То, что модуль ориентации по углу (30) выполнен в виде выборок (56), расположенных по внешнему контуру захвата (20) и первого пружинного элемента (57), расположенного на платформе (1) с возможностью взаимодействия с выборками (56), при этом, количество выборок (56)равно числу острий (16, 17) обеспечивает точность установки гибких консолей (14, 15) относительно системы регистрации (6), увеличивает соотношение рабочий сигнал - шум и обеспечивает возможность работы в условиях: с повышенными вибрациями, акустическими и электрическими шумами, а также с конвективным тепломассообменом.
То, что первый пружинный элемент (57) выполнен в виде стержня (58) обеспечивает люфт по окружности захвата (20) за счет гибкости в плоскости, перпендикулярной его оси. Этот вариант предпочтительнее при использовании гибкого вала (65), который не обладает высокой осевой жесткостью.
То, что первый пружинный элемент (57) выполнен в виде плоской пружины (59), соединенной с упором (60) обеспечивает более точную угловую установку за счет высокой жесткости плоских пружин в их плоскости.
То, что модуль ориентации по углу (25) выполнен в виде отверстий (61), расположенных по радиусу в захвате (20), количество которых равно числу острий (16, 17) и второго пружинного элемента (62), расположенного на платформе (1) с возможностью взаимодействия с выборками (61) позволяет осуществлять точную регулировку прижима, что важно при использовании различных приводов вращения.
То, что в устройство введен передаточный механизм (23), выполненный в виде гибкого вала (65), расположенного в пустотелом ограничителе (66), закрепленном на платформе (1) позволяет размещать привод вращения (21) в удобном месте, упрощать конструкцию, повышать ее надежность, что приводит к расширению функциональных возможностей устройства за счет его применения в различных условиях эксплуатации.
То, что передаточный механизм (23) выполнен в виде зубчатой передачи (69) обеспечивает высокую жесткость при вращении, что можно использовать для точного доворота захвата (20) для более точной подстройки положения консолей (14, 15) относительно источника излучения (7) и фотоприемника (8). Это повысит точностные характеристики измерения и модификации образца (3) и соответственно функциональные возможности за счет возможности работы с более широким кругом образцов.
То, что передаточный механизм (23) выполнен в виде карданной передачи (75) можно использовать для точного доворота захвата (20) для более точной подстройки положения консолей (14, 15) относительно источника излучения (7) и фотоприемника (8). Это повысит точностные характеристики измерения и модификации образца (3) и соответственно функциональные возможности за счет возможности работы с более широким кругом образцов. Кроме этого, карданная передача позволяет уходить в люфт между штифтом (76) и пазом (79), а это уменьшает нефункциональные воздействия на захват 20 и соответственно многозондовый датчик контурного типа (9) со стороны привода вращения 21, что также повышает точностные характеристики измерения и модификации образца (3) и соответственно функциональные возможности за счет возможности работы с более широким кругом образцов.
То, что в устройство введена загрузочная каретка (81), включающая второй соленоид (87), подвижно установленная на платформе (1) с возможностью сопряжения с захватом (20) и имеющая установочное место для многозондового датчика контурного типа (9) позволяет автоматизировать процесс съема-установки многозондового датчика контурного типа (9). Это упрощает эксплуатацию устройства, например, в условиях вакуума, т.к. вакуумным манипулятором (не показан) гораздо проще загрузить новый многозондовый датчик контурного типа (9), например, на штифты (82), чем непосредственно на захват (20). Это расширяет функциональные возможности использования устройства.
То, что в устройство введен модуль восстановления зондов (90), установленный на платформе (1) с возможностью взаимодействия с остриями (16, 17) обеспечивает более длительную эксплуатацию устройства без замены многозондового датчика контурного типа (9).
То, что модуль восстановления зондов (90) включает блок подачи очищенного газа (92), позволяет сдувать микрочастицы с острий (16, 17) и повышать разрешение устройства. Это особенно важно в условиях повышенной загрязненности зоны измерения.
То, что модуль восстановления зондов (90) выполнен в виде лазерного модуля (99), и(или) плазменного модуля (104), и(или) электронно-лучевого модуля (109), и(или) электростатического модуля, позволяет проводить очистку острий (16, 17), снятие с них окисла и осуществлять оперативную подточку.
То, что модуль восстановления зондов (90) выполнен в виде магнитного модуля, позволяет восстанавливать магнитные зонды, а также снимать с них примагниченные частицы.
Все манипуляции с зондами расширяют функциональные возможности использования устройства.
Литература
1. Патент RU 2244256, 10.01.2005. Многозондовый датчик контурного типа для сканирующего зондового микроскопа.
Емкостной датчик для измерения линейных перемещений
Сканирующий зондовый микроскоп для биологических применений
Способ получения замещенных 2,3,5,6-тетраоксабицикло-[2.2.1]гептанов
Способ изготовления коллоидного зондового датчика для атомно-силового микроскопа
Формирователь малорасходящихся потоков излучения
Сканирующий зондовый микроскоп, совмещенный с оптическим микроскопом
Способ получения наноразмерного амфотерицина в
Способ получения атомно-тонких монокристаллических пленок
Сканирующий зондовый микроскоп
Фармацевтическая композиция, обладающая противогрибковой активностью, и способ ее получения
Емкостной датчик для измерения линейных перемещений
Сканирующий зондовый микроскоп для биологических применений
Способ получения замещенных 2,3,5,6-тетраоксабицикло-[2.2.1]гептанов
Способ изготовления коллоидного зондового датчика для атомно-силового микроскопа
Формирователь малорасходящихся потоков излучения
Способ получения наноразмерного амфотерицина в
Способ получения атомно-тонких монокристаллических пленок
Сканирующий зондовый микроскоп
Фармацевтическая композиция, обладающая противогрибковой активностью, и способ ее получения
Сумматор свч сигналов

