Результат интеллектуальной деятельности: СЕНСОРНОЕ УСТРОЙСТВО, УСТРОЙСТВО ТАХОГРАФА И СПОСОБ РАСПОЗНАНИЯ МАНИПУЛИРОВАНИЯ
Вид РИД
Изобретение
Предметом изобретения является сенсорное устройство согласно родовому понятию пункта 1 формулы изобретения, а также устройство тахографа с подобным сенсорным устройством и способ распознавания манипулирования на сенсорном устройстве.
В области регистрации рабочих данных грузового автомобиля, ввиду документального характера регистраций, часто пытаются манипулировать ими. В прошлом, в частности, тахографы сами затрагивались этими попытками. Однако с введением цифровых тахографов, ввиду улучшенного шифрования, попытки манипулирования на тахографах существенно сократились. Однако наблюдается увеличение попыток манипулирования на сенсорных устройствах, которые включают в себя импульсные датчики для тахографов, и на интерфейсах сенсорного устройства к коробке передач. Требования, предъявляемые к сенсорным устройствам, в числе прочего, содержатся в международном стандарте ISO 16844-3 “Road vehicles - Tachograph systems - Part 3: Motion sensor interface“.
В WO 97/35282 A1 раскрыт способ предотвращения манипулирования на участке передачи сигнала импульсного датчика на контрольный прибор, а также соответствующее устройство передачи данных. Однако манипулирование измеренной величиной сенсора не может обнаруживаться.
Другая возможность манипулирования состоит в том, чтобы манипулировать передаваемыми в реальном времени импульсными сигналами. Способ предотвращения раскрыт, например, в DE 102004043052 В3.
Другая возможность манипулирования состоит в применении манипулированного импульсного датчика. Способ для распознавания присутствия подобного манипулированного импульсного датчика описан в DE 19522257 A1.
В ЕР 0892366 В1 описан способ для предотвращения манипулирования на тахометре или регистраторе пути, в котором вводится ответная мера, если сигнал импульсного датчика, представляющий скорость автомобиля, модулируется по амплитуде. За счет этого предотвращается то, что на сигнал импульсного датчика накладывается второй сигнал отличающейся частоты. Однако этот способ не мог предложить решения, когда сигнал импульсного датчика манипулируется таким образом, что частота импульсов стремится к нулю. Наложение второго сигнала имело бы следствием то, что тахограф должен был бы измерять исключительно частоту второго сигнала.
Вышеназванные способы не пригодны для того, чтобы распознавать манипулирование измеряемыми величинами. Так, можно при применении сенсоров, которые выдают сенсорный сигнал, зависимый от величины магнитного поля, выполнять манипулирование с помощью дополнительных магнитов. Дополнительный магнит помещается непосредственно на коробке передач или непосредственно на сенсорном устройстве. Магнитное поле дополнительного магнита накладывается на приложенное в зоне сенсора и модулированное ввиду движения коробки передач магнитное поле сенсора таким образом, что модуляция поля сенсорного магнита является малой относительно дополнительного магнитного поля. Это приводит к сдвигу рабочей точки сенсорного устройства и дает, в результате, ошибочный сигнал импульсного датчика. Этот тип манипулирования поясняется с помощью фиг.1а-d.
Задачей настоящего изобретения является создание сенсорного устройства, устройства тахографа, а также способа для надежного распознавания вышеупомянутого манипулирования.
Соответствующее изобретению сенсорное устройство содержит сенсор и устройство для сигнальной обработки сигнала сенсора. Выработанный сенсором сигнал сенсора демонстрирует пропорциональную зависимость от величины магнитного поля и может передаваться на устройство для сигнальной обработки как в цифровой, так и в аналоговой форме. В качестве аналогового сигнала сенсора может использоваться, например, напряжение Холла, а в качестве цифрового сигнала сенсора - выработанный из напряжения Холла сигнал с широтно-импульсной модуляцией.
Сигнал сенсора передается на вход устройства для сигнальной обработки. Устройство выполнено таким образом, что имеется первый блок сравнения, который сравнивает сигнал сенсора с по меньшей мере одним пороговым значением и в зависимости от этого вырабатывает сигнал импульсного датчика с первым или вторым значением или лежащий в первом или втором диапазоне значений.
В соответствии с изобретением устройство, кроме того, выполнено таким образом, что имеется второй блок сравнения, который сравнивает сигнал сенсора с заданным рабочим диапазоном и инициирует сигнал манипуляции, если значение сигнала сенсора однократно, периодически, квазипериодически или по меньшей мере на участках находится вне рабочего диапазона в диапазоне манипуляции. Рабочий диапазон может, например, быть определен в заданном интервале допустимых значений сигнала сенсора.
Рабочий диапазон устанавливается таким образом, что включаются все возникающие в заданном рабочем состоянии сенсорного устройства значения сигнала сенсора. При этом предпочтительным образом учитывается, что применяемые в сенсорном устройстве компоненты могут иметь дрейф или допуски на изготовление. Также могут учитываться возникающие в рамках процесса старения изменения. Рабочий диапазон сохраняется во втором блоке сравнения.
Также по меньшей мере одно пороговое значение определяется таким образом, что внутри импульсного цикла одно значение сигнала сенсора в заданном рабочем состоянии лежит выше, а одно другое значение сигнала сенсора в заданном рабочем состоянии лежит ниже порогового значения.
Если сенсорное устройство находится в фактическом рабочем состоянии, то есть в эксплуатационном повседневном состоянии, значения сигнала сенсора не достигают никаких значений вне рабочего диапазона: сигнал сенсора периодически или квазипериодически смещается между максимальным значением и минимальным значением.
Если теперь в фактическом рабочем состоянии в область сенсорного устройства вводится дополнительное магнитное поле, накладывающееся на магнитное поле сенсора, то сигнал сенсора смещается на величину, пропорциональную влиянию внешнего магнитного поля. Рабочий диапазон выбирается таким образом, что по меньшей мере одно значение сигнала сенсора лежит вне определенного или заданного рабочего диапазона, и инициируется сигнал манипуляции, если сдвиг сигнала сенсора настолько велик, что состояние сигнала импульсного датчика больше не смогло бы изменяться. Сигнал манипуляции может включать в себя (скачкообразное) изменение сигнала, отсутствие сигнала или генерирование сигнала и выдается на выходе устройства для сигнальной обработки. Сигнал манипуляции может, например, далее обрабатываться в других устройствах сенсорного устройства или устройства тахографа.
В случае устройства тахографа сигнал манипуляции может посредством относящегося к тахографу устройства для установления неисправности и/или протокола неисправности инициировать неисправность тахографа, запирать тахограф или вводить протокол неисправности. Протокол неисправности может, например, во время технического обслуживания или при актуализации тахографа передаваться на внешнюю установку обработки данных.
Сенсорное устройство защищается, таким образом, тем, что манипуляция не устраняется принудительным образом, а приводит к выдаче сигнала манипуляции. Сигнал манипуляции может запирать подключенный тахограф (или также таксометр) и инициировать функцию неисправности, которая может быть устранена только в специальной мастерской.
Предпочтительным также является то, что возможно измерение магнитного поля с помощью обычных сенсоров. Необходимо только размещение второго блока сравнения. То, является ли устройство для сигнальной обработки выполненным как печатная плата с размещенными на ней компонентами, как логическая схема микроконтроллера, в форме находящегося в микроконтроллере программного обеспечения или микропрограммного обеспечения или в смешанной форме приведенных выше примеров зависит от цели применения сенсорного устройства.
Другие формы выполнения изобретения приведены в зависимых пунктах формулы изобретения.
В одной форме выполнения первый блок сравнения обрабатывает по меньшей мере два пороговых значения. Два пороговых значения могут определять функцию гистерезиса переключения, то есть первое пороговое значение меньше, чем второе пороговое значение, и изменение состояния сигнала импульсного датчика осуществляется только тогда, когда одно значение сигнала сенсора спадает ниже первого порогового значения, а другое значение сигнала сенсора превышает второе пороговое значение. За счет функции гистерезиса переключения устройство становится более устойчивым по отношению к флуктуациям сигнала сенсора.
Особенно предпочтительным является, если функция гистерезиса переключения является динамической (или подстраиваемой) функцией гистерезиса переключения. При манипулировании пороговые значения согласуются с пороговыми значениями, подстраиваемыми из-за манипулирования, на основе возникающего из-за магнита смещения сигнала сенсора, так что сигнал импульсного датчика вновь отображает ход сигнала сенсора. Однако часто динамическое отслеживание ограничено в своем эффективном диапазоне. Следует еще отметить, что динамическое отслеживание возможно только с одним пороговым значением. Динамическое отслеживание пороговых значений имеет, кроме того, преимущество, заключающееся в том, что сенсор также работает статически.
В другой форме выполнения сигнал сенсора динамически отслеживается. При этом сигнал сенсора освобождается от своей низкочастотной составляющей, так что манипулирование со статическим магнитным полем в значительной степени исключается. Отслеживание сигнала сенсора имеет преимущество, заключающееся в том, что исключается влияние на многие переменные сенсорного устройства из-за допусков или различных дрейфов.
В другой форме выполнения устройство имеет третий блок сравнения, причем он сравнивает сигнал сенсора с безопасным рабочим диапазоном, и защитный рабочий диапазон полностью включается в рабочий диапазон. Безопасный рабочий диапазон может определяться, например, интервалом значений, лежащим в рабочем диапазоне.
При этом безопасный рабочий диапазон может быть выбран в соответствии с рабочим диапазоном таким образом, что включаются также все определенные в заданном рабочем состоянии значения сигнала сенсора.
Между рабочим диапазоном и безопасным рабочим диапазоном возникает защитный интервал. Если значение сигнала сенсора находится внутри защитного интервала, то блок оценки может ввести сравнение с сигналом импульсного датчика: если сигнал импульсного датчика не изменяется в определенном временном интервале, то регистрируется функция неисправности или требование обслуживания тахографа, подключенного к сенсорному устройству.
В комбинации с динамическим отслеживанием защитный интервал (или рабочий диапазон или безопасный рабочий диапазон) может выбираться таким образом, что возможно динамическое отслеживание пороговых значений величины защитного интервала соответствующим образом: на основе динамического отслеживания пороговых значений сигнал импульсного датчика вновь отображает ход сигнала сенсора, однако одновременно устанавливается, что имеет место предполагаемое манипулирование, так как значения сигнала сенсора находятся в защитном интервале. Если манипулирующее магнитное поле усиливается, так что динамическое отслеживание более невозможно, то сигнал сенсора по меньшей мере на участках перемещается в диапазон манипулирования и, таким образом, обуславливает инициирование сигнала манипуляции.
Другие формы выполнения следуют из подчиненных пунктов и примеров выполнения.
Соответствующий изобретению способ, сенсорное устройство и устройство тахографа поясняются далее более подробно со ссылками на чертежи, на которых представлено следующее:
Фиг.1а-d - способ и устройство согласно уровню техники,
Фиг.2 - способ согласно уровню техники,
Фиг.3а и b - пример выполнения соответствующего изобретению способа и сенсорного устройства,
Фиг.4а-с - схематичное представление заданного рабочего состояния и фактического рабочего состояния,
Фиг.5 - пример выполнения устройства тахографа.
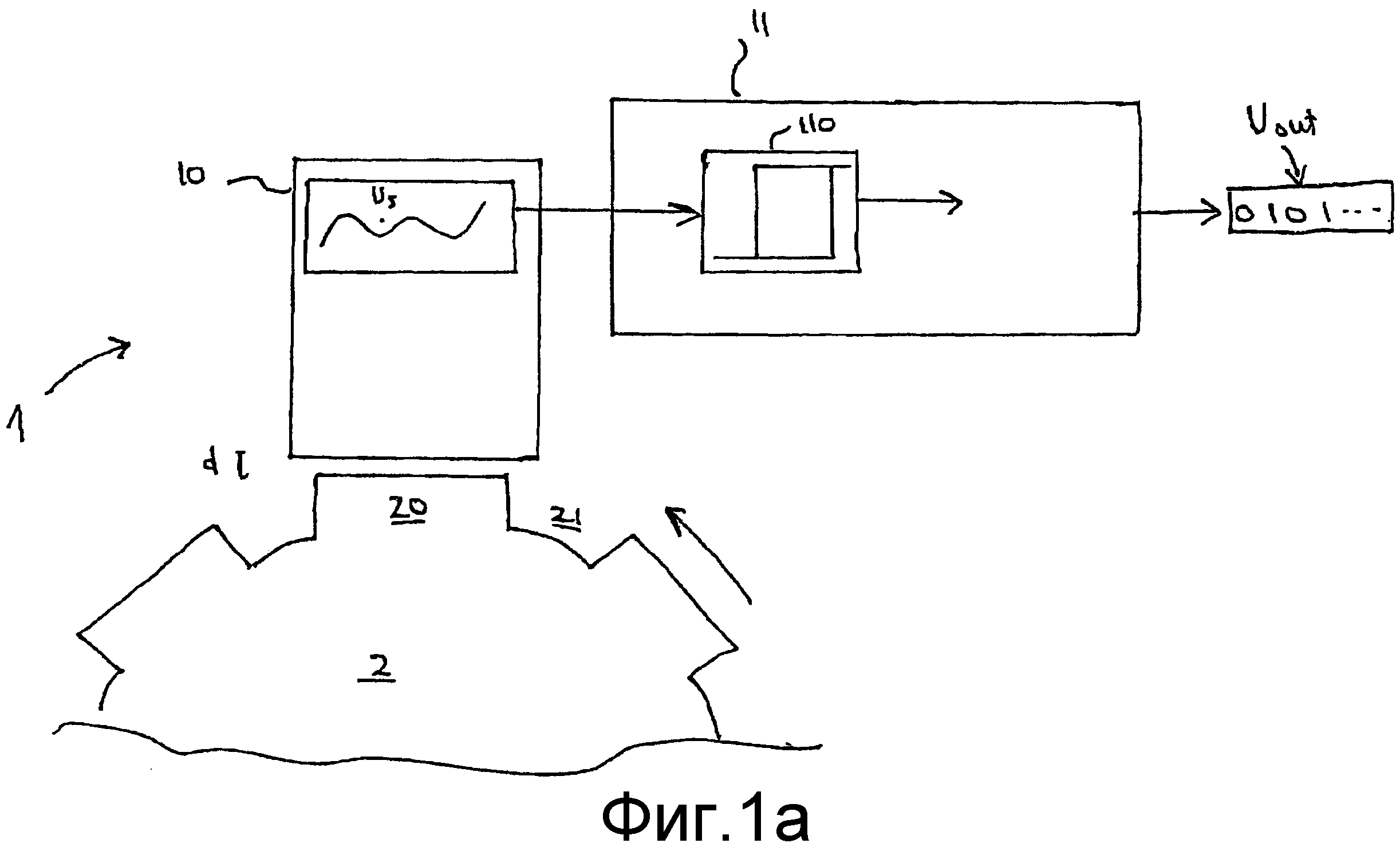
На фиг.1 показано сенсорное устройство 1, которое содержит сенсор 10 и устройство 11 для сигнальной обработки. Показанный сенсор 10 далее должен представлять собой датчик Холла со встроенным усилителем, причем сигнал US сенсора является аналоговым выходным сигналом. Сенсор 10 размещен вблизи зубчатого колеса 2, причем зубчатое колесо 2 вращается в направлении вращения R, если транспортное средство движется, и пройденное расстояние транспортного средства пропорционально числу оборотов зубчатого колеса или величине, пропорциональной числу оборотов. Зубчатое колесо 2 имеет зубцы 20 и расположенные между зубцами промежутки 21. Расстояние между зубцами 20 и сенсором 10 составляет d. Если зубчатое колесо 2 перемещается в направлении вращения R, то расстояние между зубцами 20 и сенсором 10 изменяется в зависимости от того, проходит ли сенсор 10 мимо зубца 20 или промежутка 21. Так как зубчатое колесо является магнитным или обращенная к сенсору поверхность зубца 20 или промежутка 21 имеет магнитные свойства, то сенсор 10 регистрирует модуляцию магнитного поля и модулирует сигнал US сенсора соответствующим образом. Зубчатое колесо является только примером для иллюстрации модуляции магнитного поля.
Так как сенсор 10 является датчиком Холла, который эксплуатируется с постоянным током Холла, то напряжение Холла представляет собой сигнал US сенсора.
Сигнал US сенсора обрабатывается затем в устройстве сигнальной обработки. В уровне техники это устройство содержит по меньшей мере один блок 110 сравнения, который поддерживает по меньшей мере одно пороговое значение. Пороговое значение выбирается при этом таким образом, что обусловленный зубцом сигнал сенсора лежит выше порогового значения, а обусловленный промежутком сигнал сенсора лежит ниже порогового значения. Чтобы обеспечить устойчивость по отношению к колебаниям и флуктуациям сигнала сенсора, можно ввести функцию гистерезиса переключения с двумя пороговыми значениями, как это реализуется, например, с помощью триггера Шмитта. На выходе блока 110 сравнения выдается сигнал Uout импульсного датчика, который представлен, например, в цифровой форме. При этом состояние «0» может отображать наличие промежутка, а состояние «1» может отображать наличие зубца. Из чередующейся последовательности сигнала импульсного датчика и относящихся к ней временных интервалов для расположенного после сенсорного устройства 1 тахографа становится возможным определить скорость или пройденное расстояние транспортного средства.
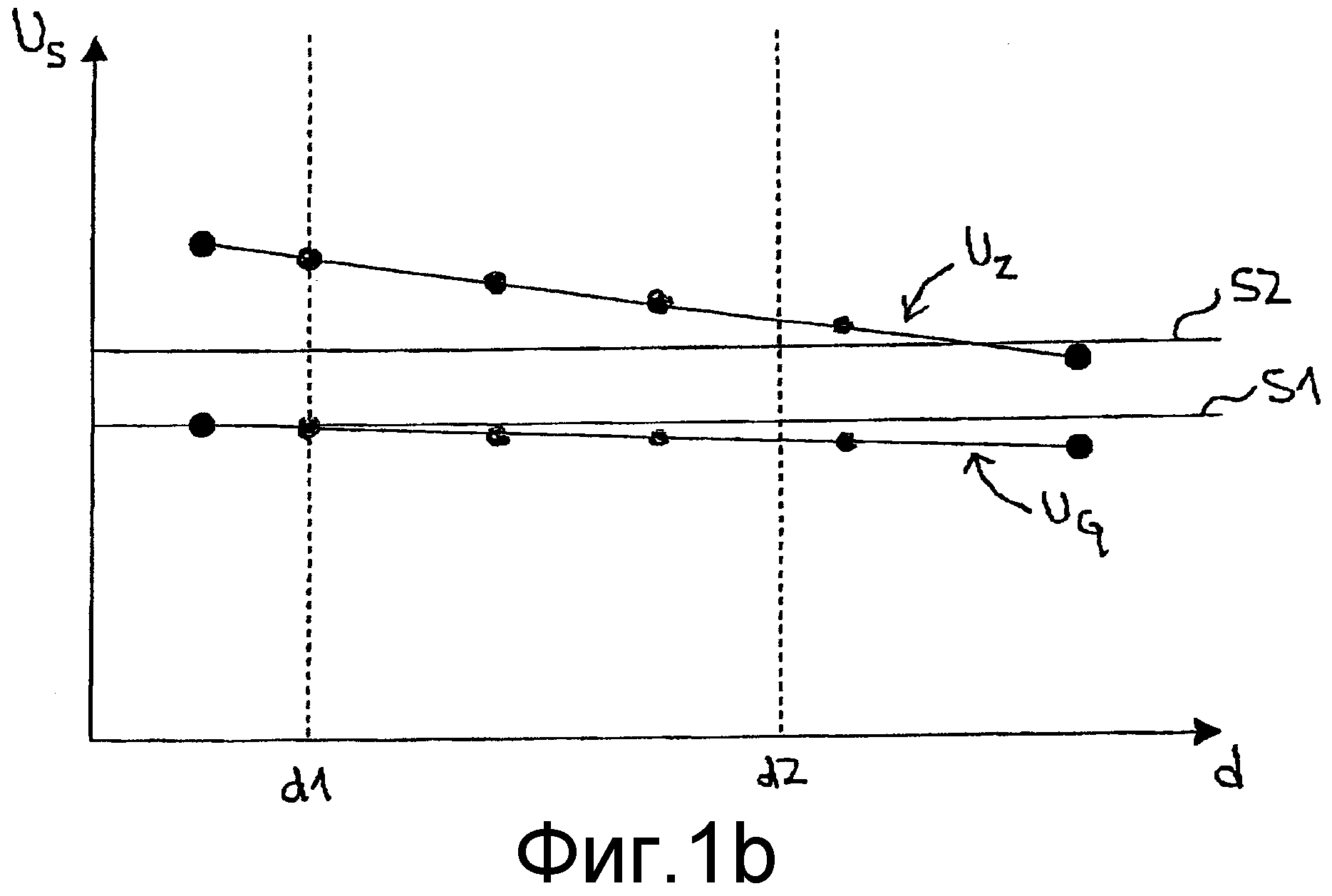
На фиг.1b представлена диаграмма, соответствующая фиг.1а. На оси абсцисс нанесено расстояние d между зубцом 20 и сенсором 10. На оси ординат нанесено значение сигнала US сенсора в вольтах. Между расстояниями d1 и d2 находятся возможные рабочие расстояния между сенсором 10 и зубцом 20, как это показано на фиг.1а. Меньшие расстояния, чем d1, или большие расстояния, чем d2, возможны ввиду допусков на изготовление, износа или манипуляций расстояния.
На фиг.1b показаны пороговые значения S1 и S2, которые являются пороговыми значениями триггера Шмитта или другого детектора пороговых значений. Измеренное сенсором 10, ввиду проходящего мимо зубца 20, максимальное значение сигнала US сенсора показано для различных расстояний d и обозначено как напряжение UZ зубца. Измеренное, ввиду проходящего мимо промежутка 21, минимальное значение сигнала US сенсора также нанесено для различных расстояний d и обозначено как напряжение UG промежутка. В диапазоне возможных рабочих расстояний, которые лежат в заданном рабочем состоянии между расстояниями d1 и d2, находятся все значения напряжения UZ зубца выше второго порогового значения S2. Аналогичным образом, все значения напряжения UG промежутка находятся ниже порогового значения S1. Сигнал US сенсора чередуется, таким образом, между значением напряжения UG промежутка и значением напряжения UZ зубца. Тем самым блок 110 сравнения формирует чередующийся сигнал импульсного датчика.
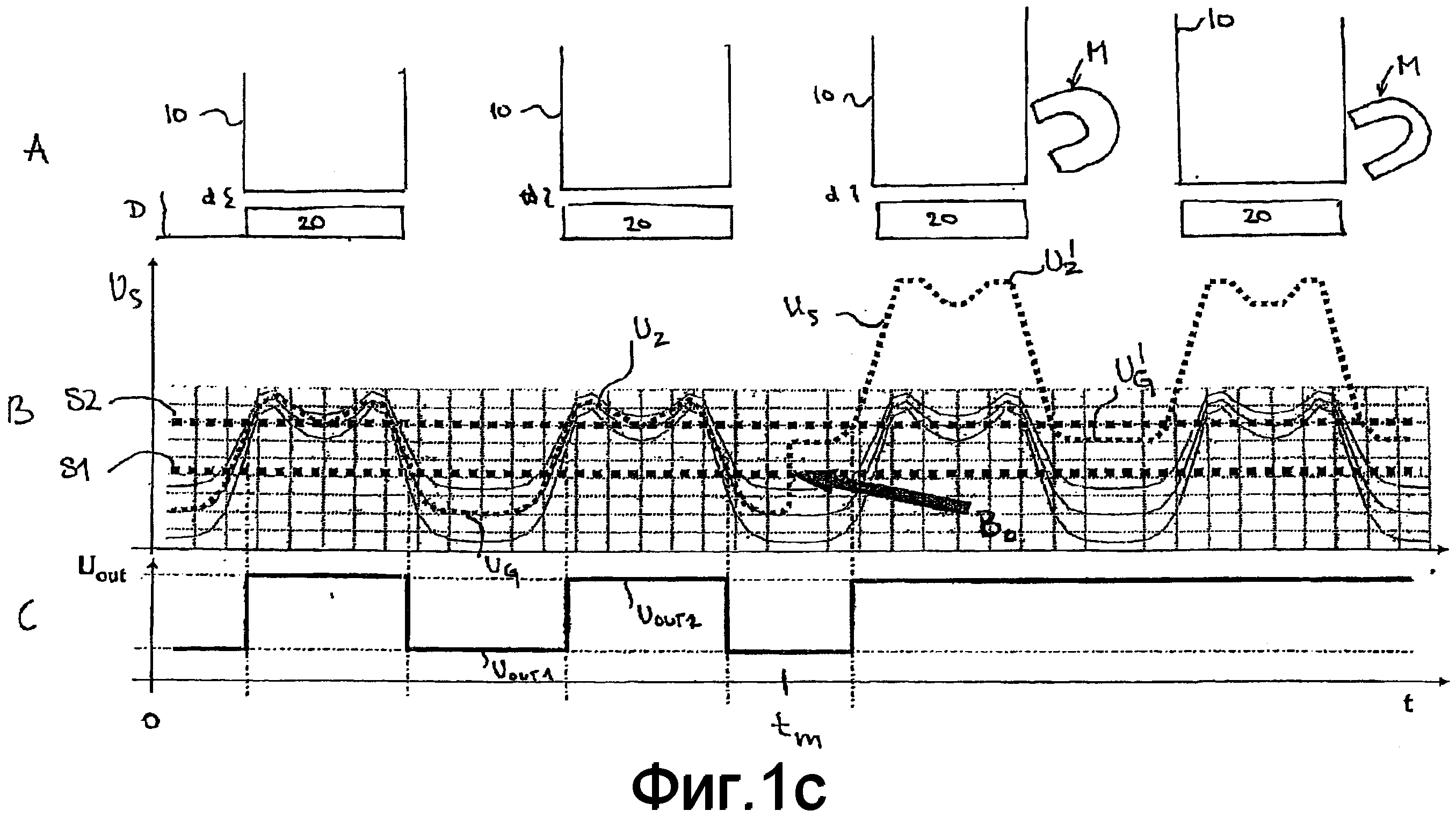
С помощью фиг.1с будет пояснено, каким образом попытка манипулирования изменяет сигнал импульсного датчика таким образом, что он выдает только одно единственное значение или состояние. В верхней части А фиг.1с показан датчик 10 с размещенным на расстоянии d1 зубцом 20. В части В показан сигнал US сенсора, а также первое и второе пороговое значение S1 и S2. В третьей части С показан зависимый от времени сигнал Uout импульсного датчика.
При прохождении зубца 20 сигнал US сенсора увеличивается выше порогового значения S2 до значения напряжения UZ зубца, соответствующего расстоянию d1. После прохождения зубца сигнал US сенсора спадает до соответствующего значения напряжения UG промежутка. В соответствии с превышением порогового значения S2 или спаданием ниже порогового значения S1 сигнал Uout импульсного датчика устанавливается в первое состояние Uout1, соответствующее промежутку, и во второе состояние Uout2, соответствующее зубцу.
К моменту времени tm на сенсоре устанавливается магнит М, который обладает статическим магнитным полем В0. Магнит М или вызванное им дополнительное магнитное поле В0 вызывает скачкообразное нарастание сигнала US сенсора в момент времени tm. Хотя и дальше зубец и промежуток, чередуясь, проходят мимо сенсора 10, сигнал US сенсора по своему значению манипулированного напряжения UG' промежутка больше не спадает ниже порогового значения S1. В соответствии с этим сигнал Uout импульсного датчика также не возвращается к состоянию Uout1, а остается постоянным во втором состоянии Uout2. Эта ситуация еще раз схематично показана на фиг.1d.
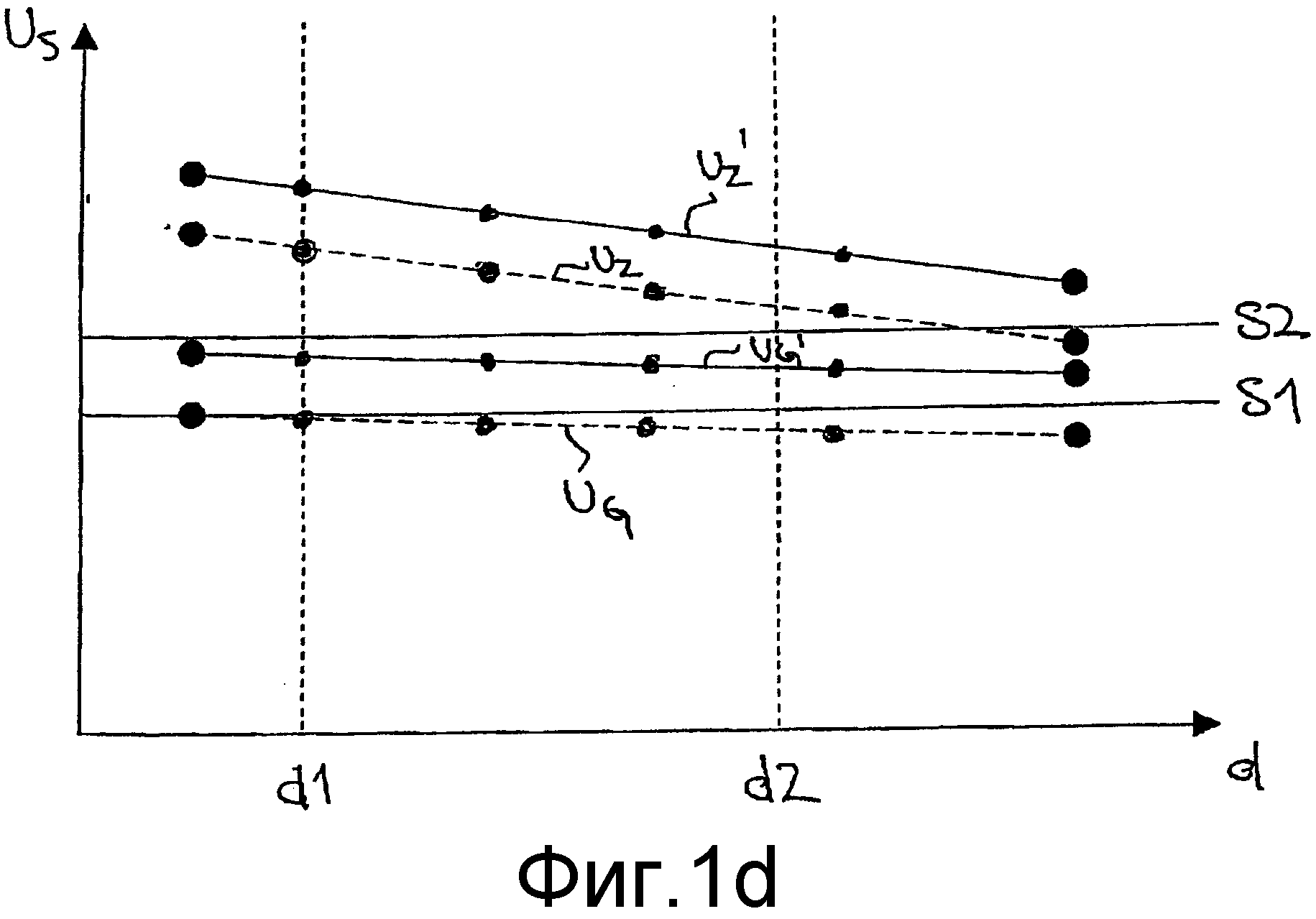
На фиг.1d, дополнительно к фиг.1b, показано манипулированное на основе статического магнитного поля В0 напряжение UZ' зубца и напряжение UG' промежутка. Величина разности между значениями UZ' и UZ при этом прямо пропорциональна напряженности статического магнитного поля В0. Аналогично фиг.1с, можно видеть, что напряжение UG' промежутка больше не спадает ниже порогового значения S1. Так как тахограф определяет пройденный путь на основе чередующегося сигнала импульсного датчика, то пройденный путь более не передается на тахограф.
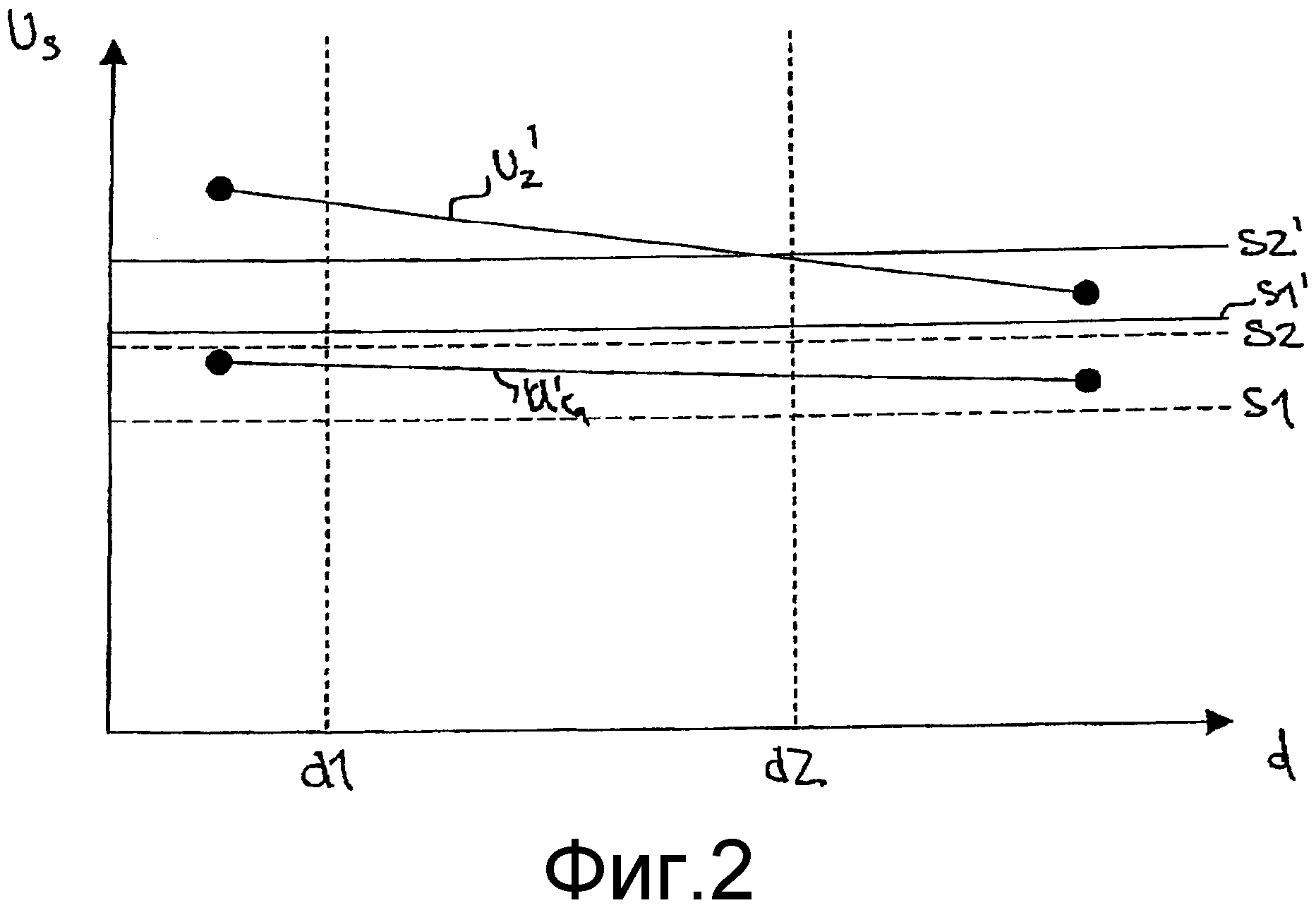
На фиг.2 показано решение из уровня техники, направленное на то, чтобы препятствовать попытке манипуляции, как пояснено выше со ссылками на фиг.1с и 1d. Для этого пороговые значения динамически отслеживаются с помощью устройства для сигнальной обработки. Это приводит к тому, что пороговые значения S1 и S2 подстраиваются к манипулированным напряжениям UZ' зубца и UG' на подстроенные пороговые значения S1' и S2'. Недостаток подобного решения состоит в том, что динамическое отслеживание пороговых значений является ограниченным. Это означает, в частности, что пороговые значения при особенно сильных магнитных полях больше не могут подстраиваться, и попытка манипулирования, как показано на фиг.1с или 1d, по-прежнему остается успешной.
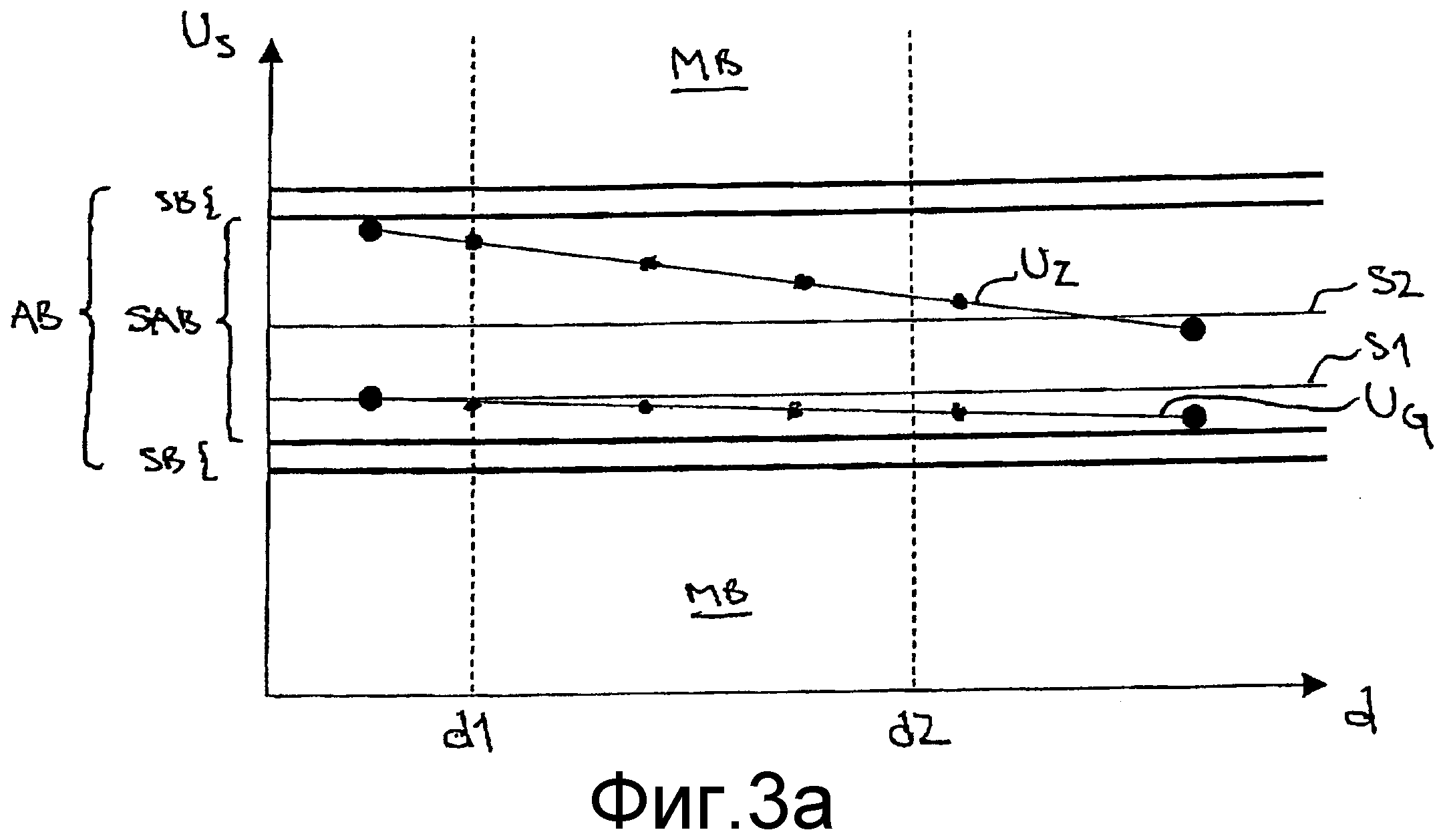
Далее поясняется соответствующее изобретению решение для успешного распознавания попытки манипулирования. На основе фиг.3а поясняется определение рабочего диапазона, исходя из заданного рабочего состояния сенсорного устройства, то есть в зоне сенсорного устройства нет никакого магнита или подобного инструмента манипулирования.
Прежде всего, устанавливается рабочий диапазон сенсорного сигнала сенсорного устройства. Рабочий диапазон определяется, наряду с возможными расстояниями между зубчатым колесом и сенсором, также появляющимися в заданном режиме значениями напряжения UZ зубца и напряжения UG промежутка. После того как релевантные для заданного рабочего состояния значения напряжения зубца и напряжения промежутка определены, определяется рабочий диапазон АВ, который включает в себя все значения напряжения промежутка и зубца в диапазоне возможных расстояний. При определении рабочего диапазона АВ также учитывается, что расстояние между сенсором и зубчатым колесом или подобным устройством, ввиду использования, может слегка изменяться или могут иметь место допуски на изготовление. Кроме того, учитывается, что электроника подвергается в известных интервалах допускам и отклонениям.
Вне рабочего диапазона АВ находится диапазон манипуляции МВ, который включает в себя значения сигнала US сенсора, при которых с высокой вероятностью можно исходить из попытки манипулирования. Факультативно, может дополнительно определяться безопасный рабочий диапазон SAB, который полностью охватывается рабочим диапазоном АВ, так что на краях безопасного рабочего диапазона SAB получается защитный интервал SB, в котором не возникает напряжение UG промежутка и напряжение UZ зубца в заданном рабочем состоянии.
Кроме того, определяются два пороговых значения S1 и S2, которые связаны функцией гистерезиса переключения.
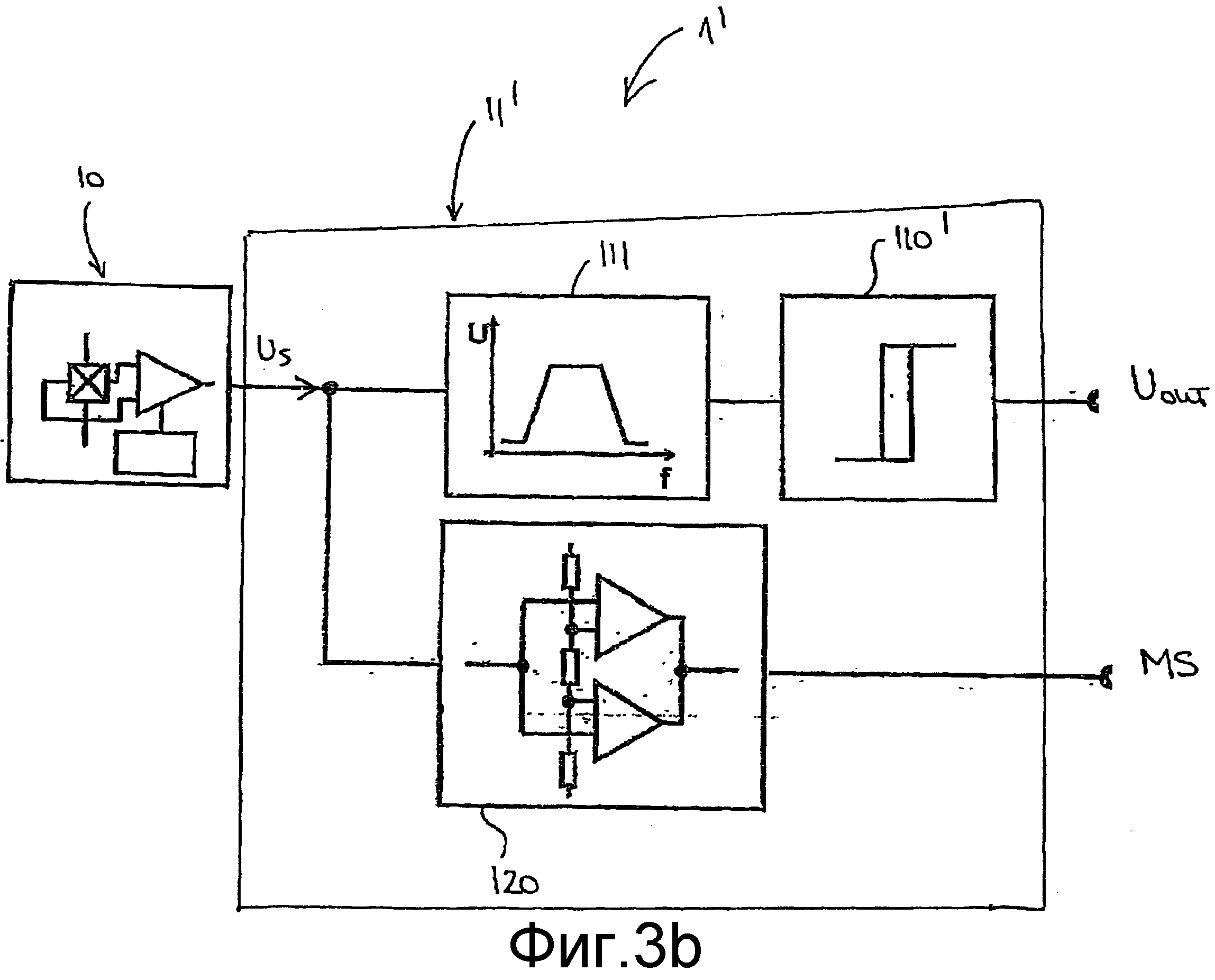
На фиг.3b показано сенсорное устройство 1', с помощью которого реализуется подобный рабочий диапазон АВ. Сенсорное устройство 1' содержит сенсор 10, который является датчиком Холла с усилителем и выдает аналоговый сигнал сенсора. Аналоговый сигнал сенсора подается на устройство 11' сигнальной обработки, причем сигнал US сенсора проходит через полосовой фильтр 111 и первый блок 110' сравнения, например, триггер Шмита. Выходом первого блока 110' сравнения является сигнал Uout импульсного датчика.
С помощью полосового фильтра 111 поступающий сигнал US сенсора динаминизируется, то есть из сигнала сенсора удаляется обусловленное вырабатывающим статическое магнитное поле магнитом постоянное смещение сигнала сенсора, так что освобожденный от постоянного смещения сигнал сенсора вновь работает в диапазоне по меньшей мере одного порогового значения. Освобожденный от постоянного смещения сигнал сенсора затем подается на первый блок сравнения для генерации сигнала импульсного датчика. В качестве нижней граничной частоты полосового фильтра может выбираться, например, 1 Гц, так как таким образом удаляется только низкочастотная составляющая ниже граничной частоты, сигнал сенсора в остальном остается нетронутым. Таким образом, не происходит никакого смещения пороговых значений, а происходит смещение сигнала сенсора в диапазон пороговых значений. Динамическое отслеживание сигнала сенсора имеет недостатки по сравнению с динамической подстройкой пороговых значений, поскольку на основе удаления низкочастотной составляющей сигнала сенсора уже невозможно установить, находится ли зубец или промежуток перед сенсором, если зубчатое колесо находится в покое, то есть сенсор больше не работает статически.
Хотя показанная здесь эквивалентная схема близка к динамической подстройке сигнала сенсора, также возможно, например, посредством микроконтроллера динамически подстраивать пороговые значения. При динамическом отслеживании пороговых значений сенсор также может работать статически, что несет с собой преимущества для других применений. В частности, оба типа отслеживания могут комбинироваться с другими признаками изобретения.
Сигнал US сенсора также подается на второй блок 120 сравнения, который выполнен, например, как оконный дискриминатор. Оконный дискриминатор устанавливает рабочий диапазон АВ. В случаях, когда сигнал US сенсора имеет значение, которое лежит вне рабочего диапазона АВ, оконный дискриминатор выдает сигнал MS манипуляции. Разумеется, также возможно, в случаях, когда сигнал US сенсора находится внутри рабочего диапазона, выдавать сигнал и отказываться от него, когда сигнал US сенсора находится вне рабочего диапазона.
Для определения безопасного рабочего диапазона SAB добавляется дополнительный блок сравнения, причем сигнал US сенсора теперь проходит как через второй, так и через третий блок сравнения.
Хотя представленное на фиг.3b сенсорное устройство 1' показано в виде блок-схемы, разумеется, можно выполнить устройство 11' для сигнальной обработки как микроконтроллер и на нем реализовывать функции, которые выполняют задачу первого, второго и, при необходимости, третьего блока сравнения. В соответствующем изобретению способе для распознавания манипулирования является только важным, что сигнал сенсора перед генерацией сигнала импульсного датчика исследуется в том отношении, находится ли он внутри или вне рабочего диапазона. Таким образом, иначе, чем в показанном на фиг.3b сенсорном устройстве 1', также можно сигнал сенсора сначала подать на второй блок 120 сравнения, и только в случае, когда сенсорный сигнал лежит внутри рабочего диапазона АВ, сигнал сенсора также можно подать на первый блок 110' сравнения.
Ширина защитного интервала SB может определяться таким образом, что величина защитного интервала SB делается зависимой от динамического согласования пороговых значений. Это означает, что ширина защитного интервала, по существу, соответствует динамически отслеживаемой величине пороговых значений или меньшей величине. Тем самым возможно установить, чтобы диапазон манипулирования начинался точно там, где динамическое согласование пороговых значений с помощью, например, первого блока сравнения более невозможно.
С помощью фиг.4 поясняется способ функционирования сенсорного устройства на основе нескольких фактических рабочих состояний, то есть рабочих состояний, при которых пытаются манипулировать в данном случае с помощью магнита.
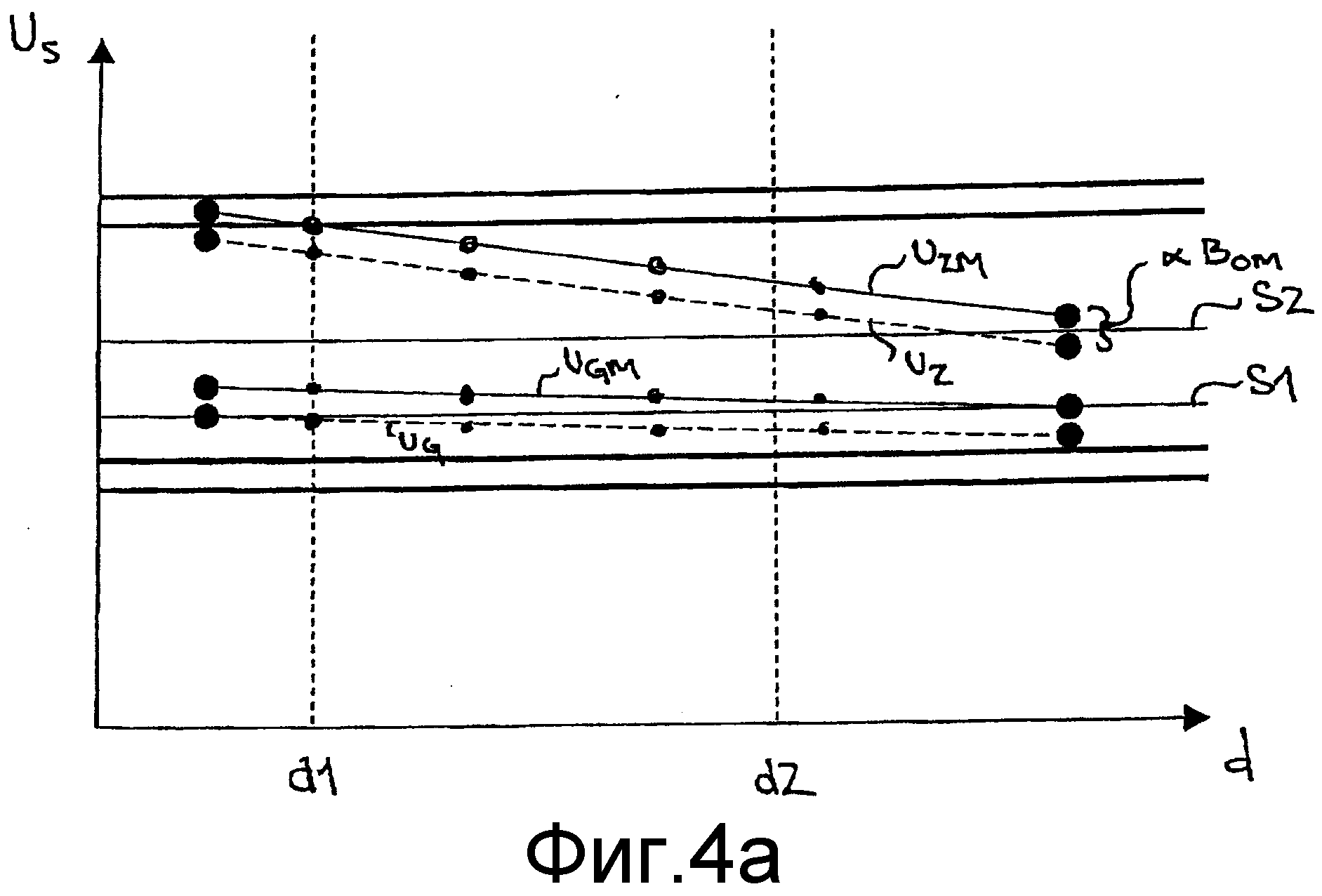
На фиг.4а напряжение UZ зубца или напряжение UG промежутка, ввиду статического магнитного поля В0М, сдвинуто до манипулированного напряжения UZM зубца или манипулированного напряжения UGM промежутка. Как видно из фиг.4, магнитное поле В0М вызывает смещение напряжения UGM промежутка таким образом, что все значения манипулированного напряжения UGM промежутка лежат выше порогового значения S1. К тому же напряжение UZM зубца сдвигается таким образом, что по меньшей мере для расстояний меньших, чем расстояние d1, напряжение UZM зубца лежит внутри защитного интервала SB.
В показанном на фиг.4а фактическом рабочем состоянии не предпринимается никакая динамическая подстройка пороговых значений. Это приводит к тому, что не происходит никакого изменения сигнала Uout импульсного датчика, так как все значения напряжения UGM промежутка лежат выше порогового значения S1. Так как выбранное рабочее расстояние составляет d1, устройство для сигнальной обработки распознает, однако, что должен иметь место определенный мешающий фактор. Хотя, поскольку значения напряжения UZM1 зубца находятся внутри рабочего диапазона, еще не инициируется сигнал манипуляции, но инициируется защитный сигнал, который вводит протоколирование хода сигнала импульсного датчика по сравнению с защитным сигналом. Так, можно, например, при длительном наличии защитного сигнала и одновременной неизменности сигнала импульсного датчика выдать требование о техническом обслуживании тахографа. Также может быть, например, что после неоднократного технического обслуживания защитный сигнал продолжает существовать, что может быть устранено только специальным обслуживанием.
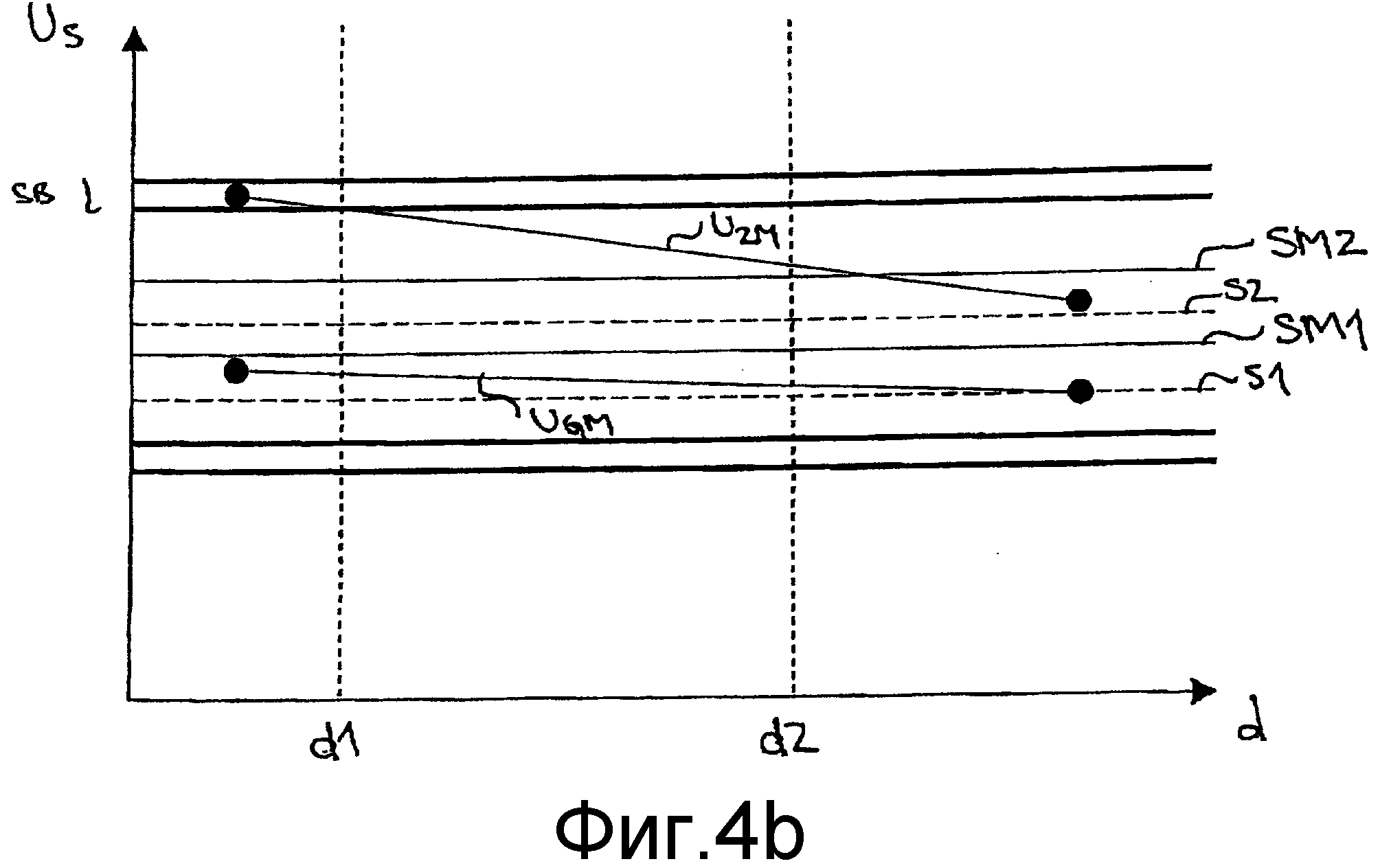
На фиг.4b показана по существу та же ситуация, что и на фиг.4а, только выполняется динамическая подстройка пороговых значений от пороговых значений S1 и S2 на согласованные пороговые значения SM1 и SM2. Хотя вновь выдается защитный сигнал, но теперь чередуются значения сигнала Uout импульсного датчика, так как, ввиду статического магнитного поля В0М, манипулированное напряжение UGM промежутка снова полностью лежит ниже согласованного порогового значения SM1. Дополнительное протоколирование хода сигнала импульсного датчика с защитным сигналом пока не требуется, однако можно потребовать, чтобы для тахографа или сенсорного устройства было проведено техническое обслуживание.
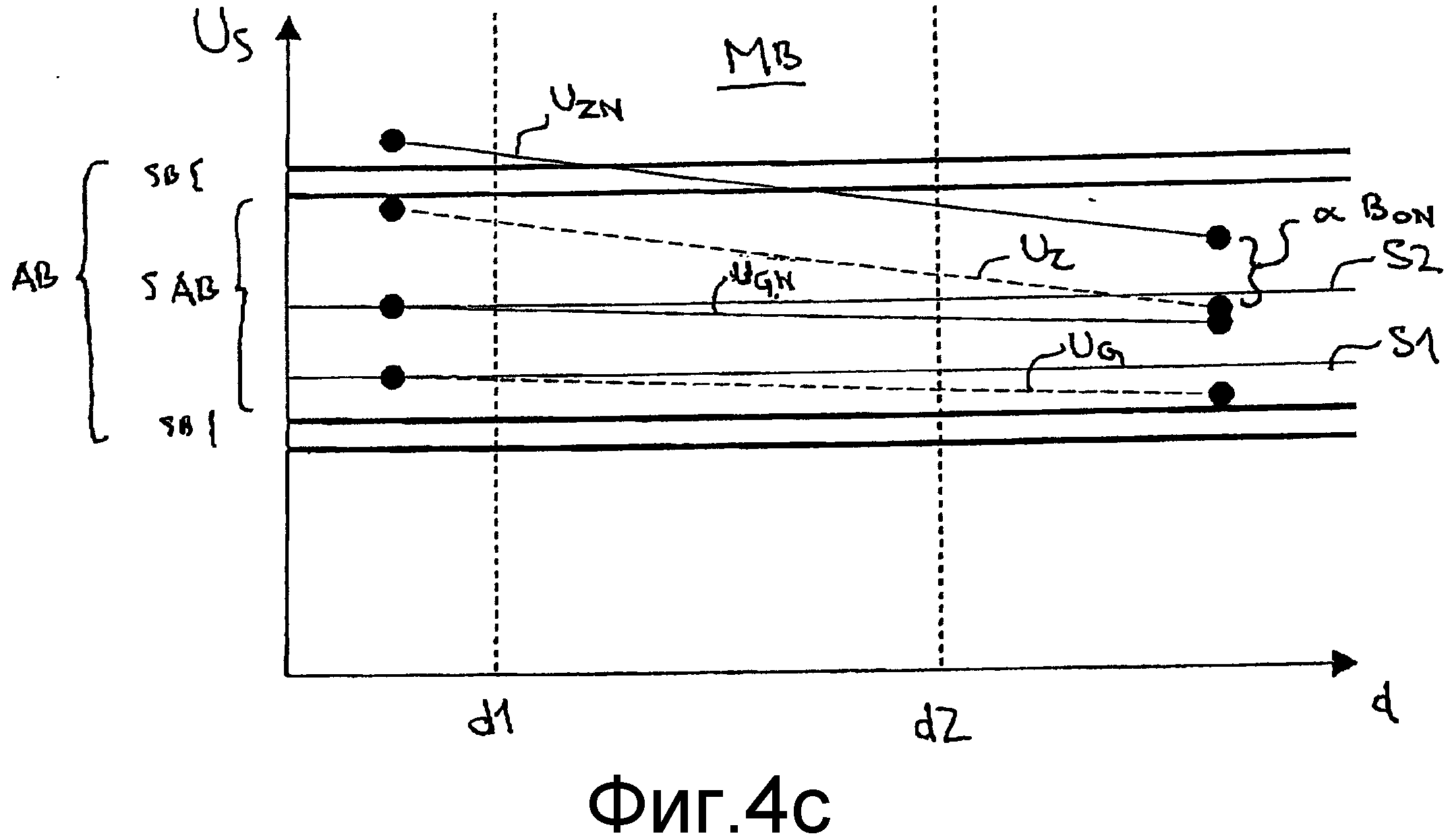
На фиг.4с показано фактическое рабочее состояние, при котором сенсорное устройство подвергается влиянию сильного магнитного поля B0N. Напряжение UZ зубца и напряжение UG промежутка при этом смещаются на некоторую величину до манипулированного напряжения UZN зубца и напряжения UGN промежутка. Величина смещения между заданным рабочим состоянием и фактическим рабочим состоянием настолько велика, что никакое динамическое согласование пороговых значений S1 и S2 больше может не выполняться. Однако было установлено, что в области имеющегося расстояния d1 значение напряжения UZN зубца настолько велико, что оно лежит в диапазоне манипуляции МВ. Это приводит к тому, что инициируется сигнал MS манипуляции, причем инициирование сигнала MS манипуляции индицирует функцию неисправности на тахографе или обуславливает протоколирование состояния неисправности на тахографе. Также возможно, что тахограф запирается, так что оператор транспортного средства должен направиться в мастерскую, чтобы вновь запустить тахограф в работу.
С помощью соответствующего изобретению способа или соответствующего изобретению сенсорного устройства также возможно распознать попытку манипулирования при необходимости инициировать отслеживание пороговых значений и индицировать функцию неисправности тахографа, если сигнал сенсора находится вне предписанного рабочего диапазона. За счет того, что функция неисправности тахографа инициируется, предполагаемый мошенник должен доставить тахограф для технического обслуживания к специализированному дилеру, что, очевидно, требует большего времени, чем время, которое можно было бы выиграть за счет манипулирования.
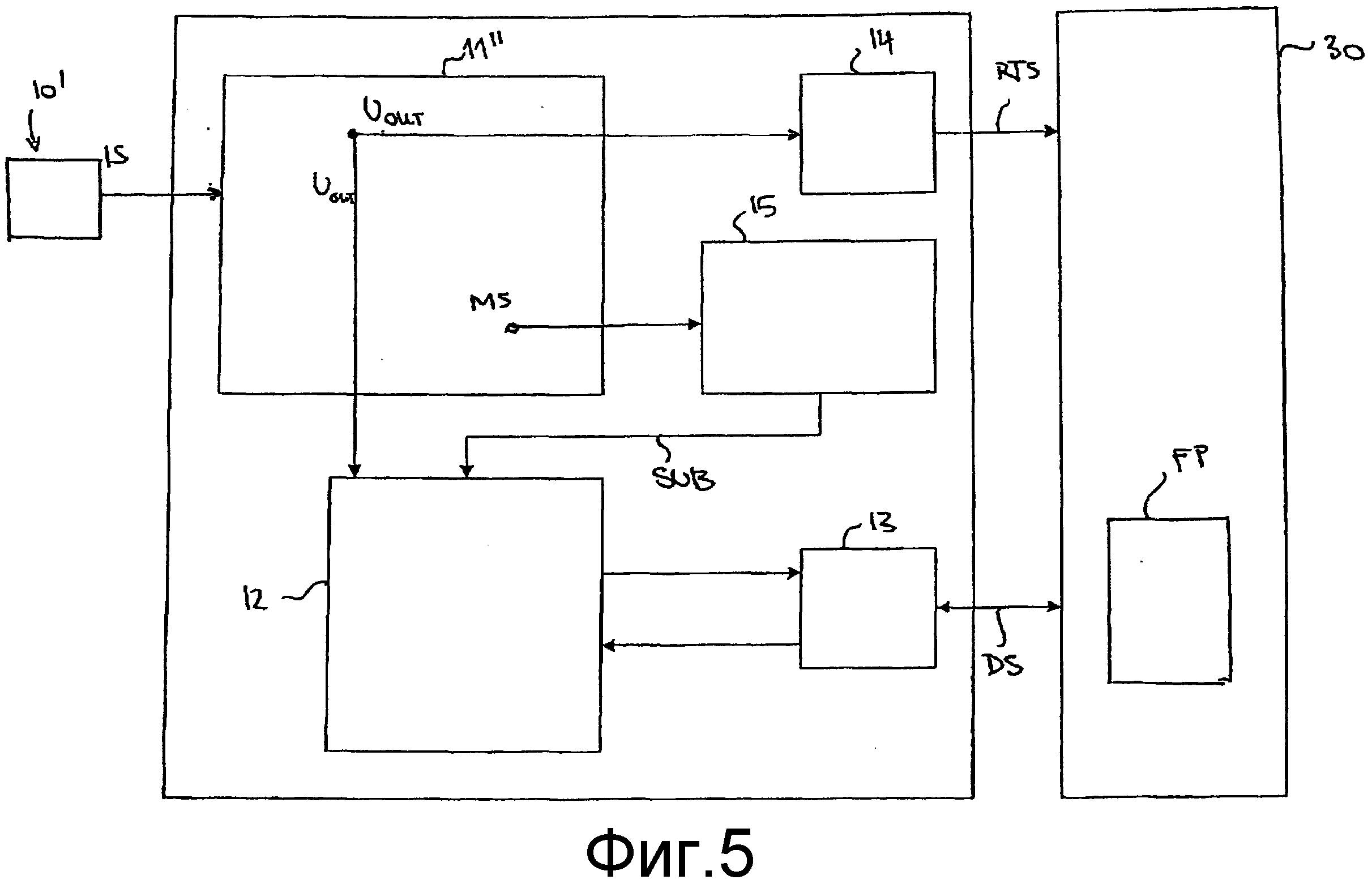
С помощью фиг.5, в заключение, поясняется пример выполнения устройства тахографа. Сенсорное устройство 1” содержит сенсор 10', который выдает цифровой сигнал IS сенсора. Цифровой выходной сигнал может быть, например, модулированным по длительности импульса. Сигнал IS сенсора подается на устройство 11” для сигнальной обработки, которое содержит цифровой микроконтроллер. Последний моделирует первый и второй блоки сравнения, причем первый блок сравнения сравнивает сигнал IS сенсора с пороговым значением и формирует на этой основе сигнал Uout импульсного датчика.
Второй, имеющийся в микроконтроллере блок сравнения устанавливает, действует ли сигнал IS сенсора внутри допустимого рабочего диапазона. Если это не имеет места, то выдается сигнал MS манипуляции. Если сигнал MS манипуляции выдан, он передается далее на блок 15 питания от сети. В блоке 15 питания от сети инициируется прерывание напряжения, которое как сигнал SUB направляется в микроконтроллер 12. Микроконтроллер 12 соединен с драйвером 13 тахографа 30, формирует сигнал SUB и выдает его на драйвер 13, который сигнал SUB передает как зашифрованный сигнал DS данных на тахограф 30. В тахографе 30 зашифрованный сигнал DS данных регистрируется в устройстве FP для протоколирования неисправности и инициирует функцию неисправности тахографа.
На микроконтроллер 12 также подается сигнал Uout импульсного датчика. Тем самым могут быть реализованы дополнительные варианты механизмов оценки между сигналом SUB и сигналом Uout импульсного датчика. Кроме того, сигнал Uout импульсного датчика передается на возбудитель 14 сигнала, который сигнал импульсного датчика как сигнал RTS реального времени передает на тахограф 30 для дальнейшей обработки.
Способ активирования функций тахографа
Колесная электроника, колесо транспортного средства и транспортное средство
Тахограф
Способ и устройство для локализации местоположений монтажа колес транспортного средства в автомобиле
Способ управления двойным впрыском и устройство для его применения
Способ и устройство обнаружения блокировки спускного клапана фильтра паров бензина
Система и бортовое устройство для интеграции функций автомобильных устройств
Способ и устройство для обнаружения блокировки спускного клапана фильтра паров бензина для двигателя транспортного средства
Установочный терминал и система для управления функциями транспортного средства
Тахограф с интерфейсом для внешнего устройства ввода данных
Способ активирования функций тахографа
Колесная электроника, колесо транспортного средства и транспортное средство
Тахограф
Способ и устройство для локализации местоположений монтажа колес транспортного средства в автомобиле
Способ управления двойным впрыском и устройство для его применения
Способ и устройство обнаружения блокировки спускного клапана фильтра паров бензина
Система и бортовое устройство для интеграции функций автомобильных устройств
Способ и устройство для обнаружения блокировки спускного клапана фильтра паров бензина для двигателя транспортного средства
Установочный терминал и система для управления функциями транспортного средства
Тахограф с интерфейсом для внешнего устройства ввода данных

