Результат интеллектуальной деятельности: КОЛЕСНАЯ ЭЛЕКТРОНИКА, КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО
Вид РИД
Изобретение
Настоящее изобретение относится к колесной электронике, к колесу транспортного средства и к транспортному средству.
Давление воздуха в шине транспортного средства по разным причинам, например из-за давления окружающей среды колеса, температуры, срока службы колеса и т.д., подвержено определенным изменениям. В этой связи было установлено, что неправильно установленное давление является существенным фактором дорожно-транспортных происшествий. Поскольку безопасность и надежность транспортных средств являются основными факторами в автомобильной сфере, то уже по одним только причинам технической безопасности необходимо регулярно контролировать давление воздуха в шине. Однако исследования показали, что регулярно контролируют давление воздуха в шине лишь немногие водители транспортного средства.
Среди прочего, по этим причинам современные транспортные средства имеют шинные информационные устройства. Эти шинные информационные устройства содержат встроенную в колесо транспортного средства колесную электронику, измеряющую специфические измеряемые величины различных измеряемых параметров, относящиеся к колесу (например, давления воздуха в шине, температуры шины, нагрузки на колесо и т.п.), а производную от них информацию направляют в приемное устройство транспортного средства. Колесная электроника может быть использована также для определения положения колеса.
В основу настоящего изобретения положена задача создания усовершенствованной колесной электроники.
Согласно изобретению эта задача решается с помощью колесной электроники с признаками пункта 1 формулы изобретения и/или колеса транспортного средства с признаками пункта 14 формулы изобретения и/или транспортного средства с признаками пункта 15 формулы изобретения:
Сообразно этому предусмотрена:
Колесная электроника для шинного информационного устройства, расположенная в состоянии, встроенном в колесе транспортного средства, содержащая: первый датчик, выполненный с возможностью приема измерительного сигнала, содержащего по меньшей мере один специфический параметр колеса, и устройство обработки данных, выполненное с возможностью определения по измерительному сигналу текущего положения вращающегося колеса на момент измерения.
Колесо транспортного средства, в частности, транспортного средства, снабженного шинным информационным устройством, имеющее обод и шину, причем колесо транспортного средства содержит дополнительно по меньшей мере один блок колесной электроники согласно изобретению, установленной в колесе или на нем.
Транспортное средство, в частности, легковой автомобиль, с несколькими колесами и с шинным информационным устройством, причем по меньшей мере одно колесо снабжено колесной электроникой согласно изобретению.
Идея, положенная в основу настоящего изобретения, состоит в том, чтобы включить в колесную электронику, используемую в шинном информационном устройстве или для него, датчик для определения специфических параметров колеса. Такие сами по себе известные датчики обычно используются для того, чтобы передавать информацию об измеренных специфических параметрах колеса с помощью передающего устройства в приемное устройство транспортного средства. В настоящем изобретении специфические параметры и измеренные значения колеса, полученные датчиком, теперь подаются дополнительно в устройство обработки данных, специально предусмотренное в колесной электронике, где они затем анализируются. Затем с помощью устройства обработки данных по первым измеренным специфическим параметрам колеса определяется текущее положение вращения колеса транспортного средства. Таким образом, функциональность колесной электроники, а также первого датчика, предусмотренного в колесной электронике, расширяется. В частности, колесная электроника выдает теперь не только чисто специфические параметры колеса. Более того, в порядке дополнения или альтернативы выдается также информация о том, в какой момент времени произведено измерение специфического параметра колеса и/или в какой момент времени должна быть передана информация, содержащая специфические параметры колеса.
Предпочтительные и усовершенствованные варианты выполнения изобретения вытекают из дополнительных зависимых пунктов формулы изобретения со ссылкой на чертежи.
В одном из предпочтительных вариантов выполнения предусмотрено передающее устройство для передачи информационного сигнала. Этот информационный сигнал может содержать, например, информацию о положении вращения колеса транспортного средства, определенном устройством обработки данных. В порядке дополнения или альтернативы информационный сигнал может содержать также информацию о вторых специфических параметрах колеса. К этим вторым специфическим параметрам колеса могут быть отнесены, например, текущее давление в шине, рисунок протектора шины, температура шины, продольное ускорение колеса, поперечное ускорение колеса и т.п. Кроме того, здесь может быть предусмотрена также информация, используемая для определения местоположения колеса, как, например, частотная и/или амплитудная модуляция, специфическая для соответствующего колеса транспортного средства, серийный номер колеса транспортного средства, содержащийся в передаваемом информационном сигнале и т.п.
В одном из других предпочтительных вариантов выполнения предусмотрено устройство управления, подающее информационный сигнал в одном из заданных положений колеса транспортного средства или при одном из задаваемых угловых диапазонов колеса транспортного средства. Передача информационного сигнала может производиться на основе времени или угла вращения. При этом информационный сигнал не обязательно должен передаваться одновременно с его определением или сразу же после этого. Более того, иногда даже предпочтительно, чтобы информационный сигнал передавался в благоприятный момент времени или угловом диапазоне колеса транспортного средства. Особенно предпочтительно, чтобы информационный сигнал таким образом передавался в тот момент, когда, например, колесо транспортного средства и тем самым предусмотренная в нем электроника не заслоняются кузовными элементами транспортного средства, как, например, колесной нишей или другими деталями кузова, что затрудняет прием в транспортном средстве или даже препятствует ему. Благодаря тому, что точное положение вращения определяется непосредственно электроникой колеса и потому является известным, за счет целенаправленной передачи информационного сигнала, с одной стороны, удается улучшить связь с приемным устройством транспортного средства, в частности, качество связи. Кроме того, таким образом удается также сэкономить энергию колесной электроники, поскольку колесной электронике не приходится больше передавать в приемное устройство транспортного средства в известной степени «внеплановые» информационные сигналы. В частности, в этом случае можно даже отказаться от многократной избыточной передачи или от энергоемкого протокола приема-передачи. В альтернативном порядке передаваемые сигналы можно было бы сознательно распределить на все угловые диапазоны от 0 до 360°, например, путем добавления произвольного времени ожидания, так чтобы обеспечивался также прием по меньшей мере определенной части передаваемых сигналов со стороны транспортного средства.
Наряду с этим может быть также предпочтительно, чтобы устройство управления передавало информационный сигнал за время одного или нескольких оборотов колеса многократно, например, 3-5 раз. Многократная передача может осуществляться, например, в статистически не задаваемые моменты времени или в статистически не задаваемых положениях вращения. Благодаря многократной передаче информационного сигнала и сопутствующей этому избыточности, с одной стороны, и статистически не заданным произвольным моментам времени передачи, с другой, обеспечивается, например, еще более надежная передача в приемное устройство транспортного средства.
В одном из предпочтительных вариантов выполнения первый датчик выполнен как датчик положения или переключатель положения. Этот первый датчик здесь рассчитан на определение текущего положения вращения заданной точки на колесе транспортного средства на основе обнаружения известных эталонных диапазонов и точек.
В одном из альтернативных вариантов выполнения первый датчик может быть выполнен также в виде магниточувствительного датчика. Таким магниточувствительным датчиком является, например, датчик Холла или герконовый переключатель. Магниточувствительный датчик рассчитан на определение текущего положения вращения колеса транспортного средства путем измерения известного магнитного поля. Это известное магнитное поле может быть создано, например, с помощью электромагнита или постоянного магнита, установленного в кузове транспортного средства. В типичном случае этот магнит установлен в кузове в известном, определенно заданном положении, например в колесной нише. Для определения его положения вращения датчик может быть также выполнен с возможностью использования магнитного поля земли.
В альтернативном варианте выполнения первый датчик выполнен в виде так называемого инерциального датчика. Инерциальным датчиком может быть, например, датчик ускорений или шок-датчик. С помощью датчика ускорений можно определить текущее положение вращения заданной точки колеса транспортного средства на основе ускорения, определенного по увеличению или уменьшению скорости колеса транспортного средства. Посредством шок-датчика удается определить производную полученного таким образом ускорения и тем самым текущее положение вращения.
В особенно предпочтительном варианте выполнения первый датчик выполнен в виде пьезодатчика. Пьезодатчик рассчитан на определение кривизны шины колеса транспортного средства. При этом пьезодатчик в зависимости от того, какое изменение он должен обнаруживать, может быть выполнен в виде датчика деформации, датчика изгиба, датчика сжатия и/или датчика растяжения.
В одном из предпочтительных вариантов выполнения устройство обработки данных выполнено для анализа измерительных сигналов на основе гравитации. В частности, устройство для обработки данных для анализа на основе гравитации может использовать измеряемое ускорение или производную измеряемого ускорения.
В одном из также предпочтительных вариантов выполнения устройство обработки данных содержит считывающее устройство, которое для определения дискретных значений измерительного сигнала, представляемого обычно в аналоговой форме, осуществляет дискретизацию этого измерительного сигнала. Анализ в этом случае обычно осуществляется в цифровой форме, например, на основе определенных дискретных значений измерительного сигнала.
В одном из предпочтительных вариантов выполнения предусмотрен датчик скорости, определяющий текущую скорость колеса транспортного средства или самого транспортного средства. Кроме того, считывающее устройство выполнено для адаптации периодов дискретизации. Эта адаптация периодов дискретизации осуществляется путем дискретизации измерительного сигнала в зависимости от определенной скорости колеса транспортного средства. Измерительный сигнал обычно является измеряемой величиной, зависящей от скорости транспортного средства и тем самым от угловой скорости колеса транспортного средства. Эти различные скорости учитываются при адаптации периодов дискретизации. Таким образом, путем постоянных, заданных моментов дискретизации всегда измеряется, например, период измерительного сигнала, соответствующий обороту колеса транспортного средства. Это повышает точность дискретизации и тем самым измерения прежде всего при больших угловых скоростях колеса транспортного средства.
В порядке дополнения или альтернативы было бы также возможно, чтобы информация о текущей скорости колеса транспортного средства или самого средства определялась и передавалась им через приемное устройство в колесную электронику. В этом случае колесная электроника должна была бы включать также колесное приемное устройство и колесное устройство обработки данных, которые могли бы принимать и анализировать сигнал транспортного средства, чтобы таким образом определять скорость. Однако это потребует затрат на схему и на вычисления.
В одном из предпочтительных вариантов выполнения устройство обработки данных содержит фильтрующее устройство для фильтрации и тем самым для сглаживания определенного измерительного сигнала. В частности, предпочтительно, предусмотрено фильтрующее устройство с постоянным, т.е. линейным, сдвигом по фазе. Такое фильтрующее устройство с постоянным сдвигом по фазе, предпочтительно, может быть выполнено в виде фильтра Бесселя. Этот вариант выполнения фильтра облегчает анализ измерительных сигналов, поскольку известно, что фильтрация является частотно-независимой.
В одном из также предпочтительных вариантов выполнения устройство обработки данных содержит фазосдвигающее устройство. С помощью этого фазосдвигающего устройства удается уменьшить, а, предпочтительно, даже полностью скомпенсировать сдвиг по фазе, вызванный фильтрацией измерительного сигнала. В частности, в связи с фильтрующим устройством с постоянным, линейным сдвигом по фазе предпочтительным образом его с помощью фазосдвигающего устройства можно сделать обратимым и таким образом скомпенсировать. Это делается, например, с помощью простого вычисления известного постоянного сдвига по фазе, пока измерительный сигнал снова не окажется в правильной фазе.
В одном из предпочтительных вариантов выполнения предусмотрен по меньшей мере один второй датчик, выполненный с возможностью определения вторых специфических параметров колеса. С помощью первых специфических параметров колеса вычислялись, как уже было пояснено выше, те параметры, которые были необходимы для определения текущего положения вращения. С помощью второго датчика теперь можно дополнительно определять другие специфические параметры колеса, как то: текущее давление воздуха в шине, температуру шины, рисунок протектора шины, ускорение колеса транспортного средства и т.п., и в виде информационного сигнала передавать их с колесного передающего устройства в приемное устройство транспортного средства. В одном из особенно предпочтительных вариантов выполнения предусмотрен только один единственный датчик, соединяющий в себе функциональные возможности первого и второго датчиков. В частности, это является преимуществом в том случае, когда, например, посредством первого датчика уже измерена та информация, которая необходима не только для определения положения колеса, но и передается также дальше в приемное устройство транспортного средства для дальнейшей обработки в информационном устройстве транспортного средства. Такой информацией может быть, например, ускорение колеса транспортного средства, гравитационная информация, давление воздуха в шине и т.п.
В одном из вариантов выполнения колеса транспортного средства согласно изобретению колесная электроника может быть установлена, например, на ободе колеса. В альтернативном плане было бы возможно также вулканизировать колесную электронику в шину колеса транспортного средства или посредством специально предусмотренного для этого зажимного устройства зажать ее внутри покрышки шины, например, в области протектора шины. Можно было бы также вклеить датчик в протектор шины. В порядке альтернативы этому в протектор шины можно вклеить контейнер, в который затем устанавливается датчик.
В качестве задаваемого положения вращения колеса транспортного средства одно или несколько положений вращения могут быть выбраны из следующей группы:
- достижение задаваемого углового положения колеса транспортного средства относительно окружающего пространства колеса транспортного средства;
- вход на отпечаток протектора шины, т.е. вхождение заданной точки на окружности колеса транспортного средства на площадь контакта колеса (т.н. отпечаток шины);
- выход с отпечатка протектора покрышки, т.е. схождение заданной точки на окружности колеса транспортного средства с площади контакта колеса;
- середина отпечатка протектора покрышки, или низшее положение колеса транспортного средства, т.е. достижение заданной точкой на окружности колеса транспортного средства середины площади контакта колеса;
- достижение высшего положения колеса транспортного средства;
- положение на 3 или на 9 часов, т.е. достижение положения колеса транспортного средства между высшим и низшим положениями колеса транспортного средства, т.е. середины площади контакта колеса.
Наряду с этим возможно, конечно, и любое другое фиксированное заданное положение вращения. В порядке альтернативы этому было бы также возможно, чтобы колесная электроника передавала информационный сигнал в любых положениях вращения, однако чтобы при передаче информационные сигналы передавали информацию о текущем положении вращения колеса транспортного средства именно тогда, когда информация передавалась. При этом не требуется обнаружения определенного положения колеса, а требуется непрерывное определение текущего положения вращения.
Вышеупомянутые и усовершенствованные варианты выполнения, если это имеет смысл, могут комбинироваться между собой в произвольном порядке. Другие возможные варианты выполнения, усовершенствования и воплощения изобретения не содержат также явно выраженных комбинаций из того, что было ранее, или признаков изобретения, описанных ниже в отношении примеров выполнения. В частности, специалист также добавит при этом отдельные аспекты в качестве усовершенствований или дополнений к соответствующей основной форме настоящего изобретения.
Ниже настоящее изобретение более подробно поясняется на примерах выполнения со ссылкой на фигуры с чертежами, на которых
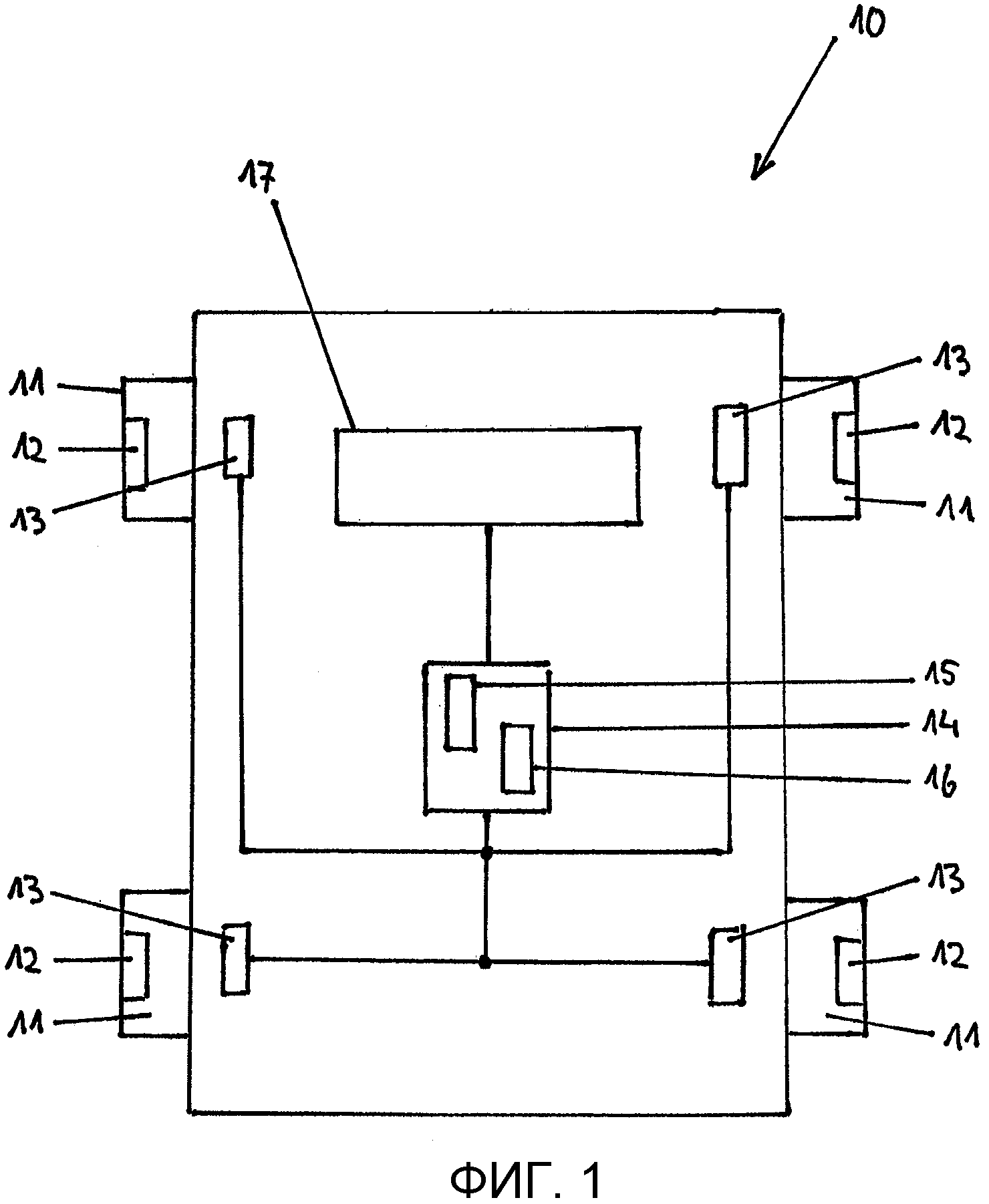
фиг.1 изображает схематично транспортное средство, снабженное шинным информационным устройством согласно изобретению;
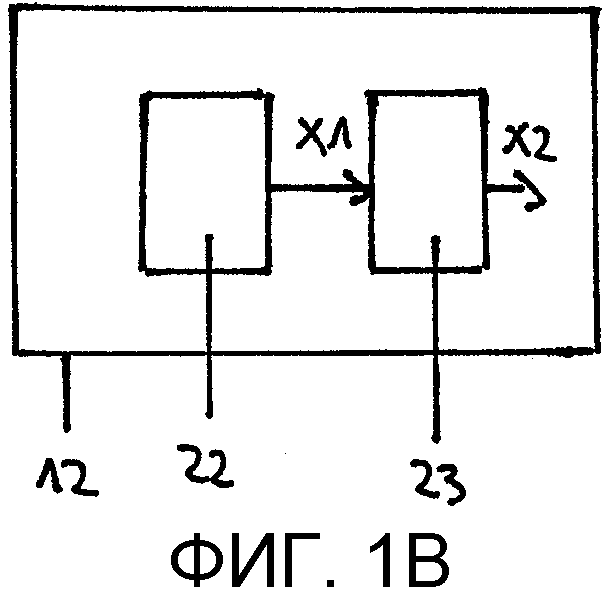
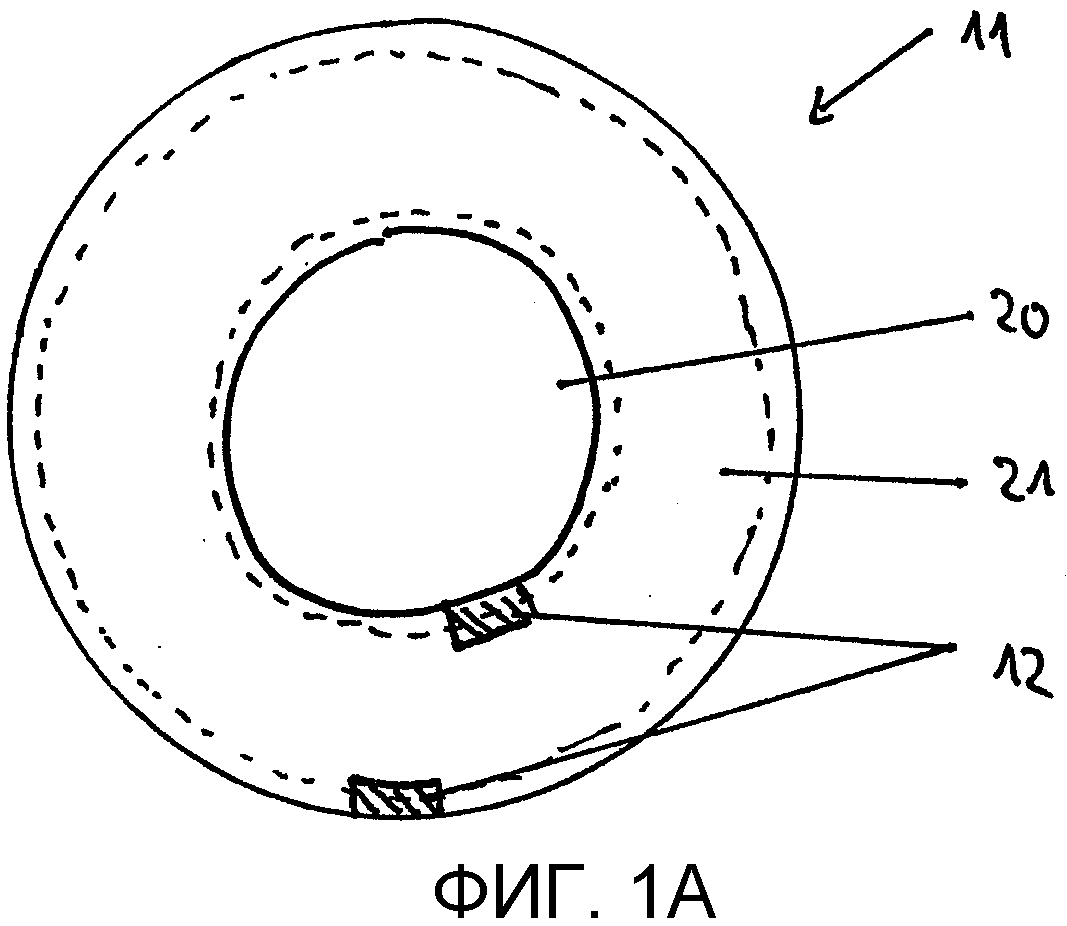
фиг.1А, 1В изображают схематично колесо транспортного средства согласно изобретению или колесную электронику согласно изобретению;
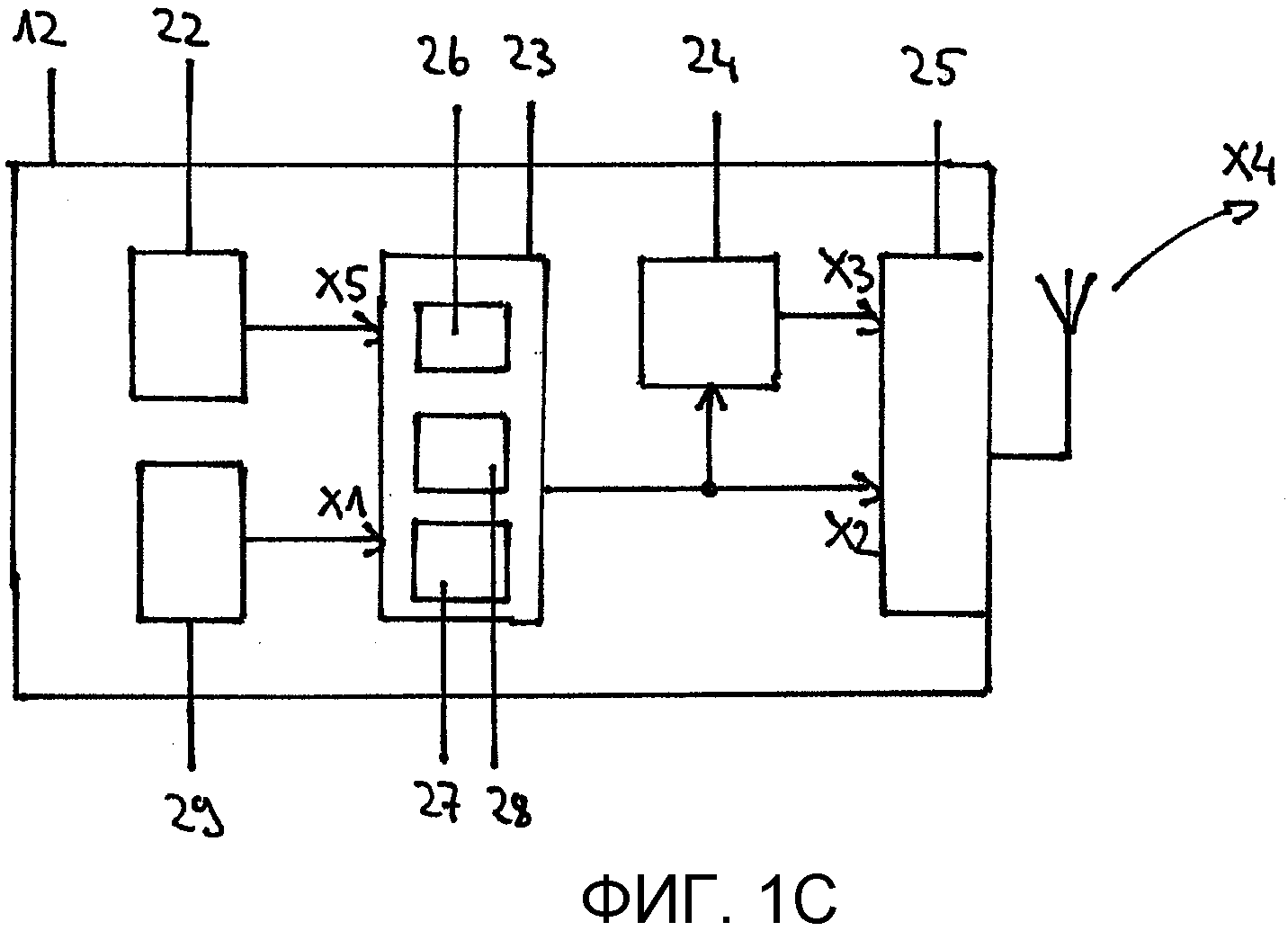
фиг.1С изображает блок-схему предпочтительного примера выполнения колесной электроники согласно изобретению;
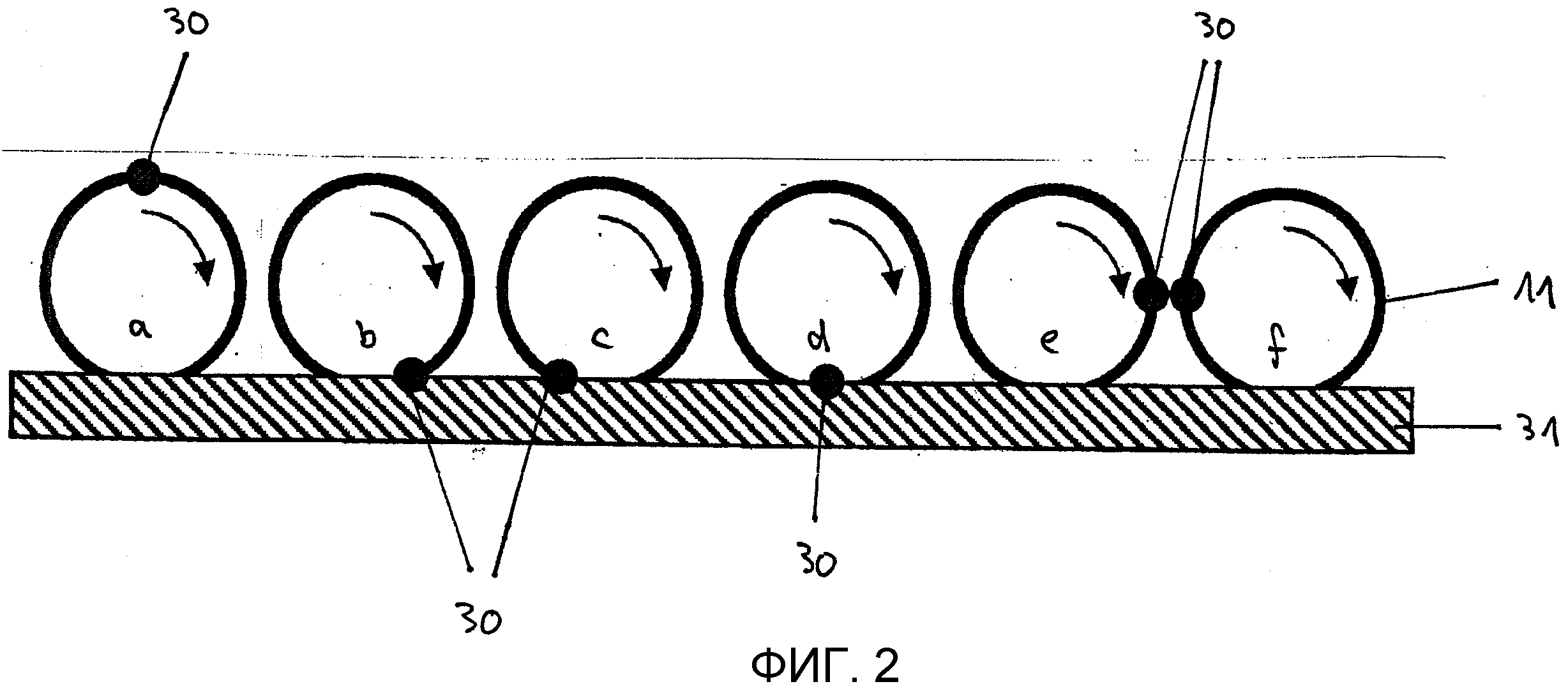
фиг.2 - различные положения вращения заданной точки, например колесной электроники, относительно колеса транспортного средства;
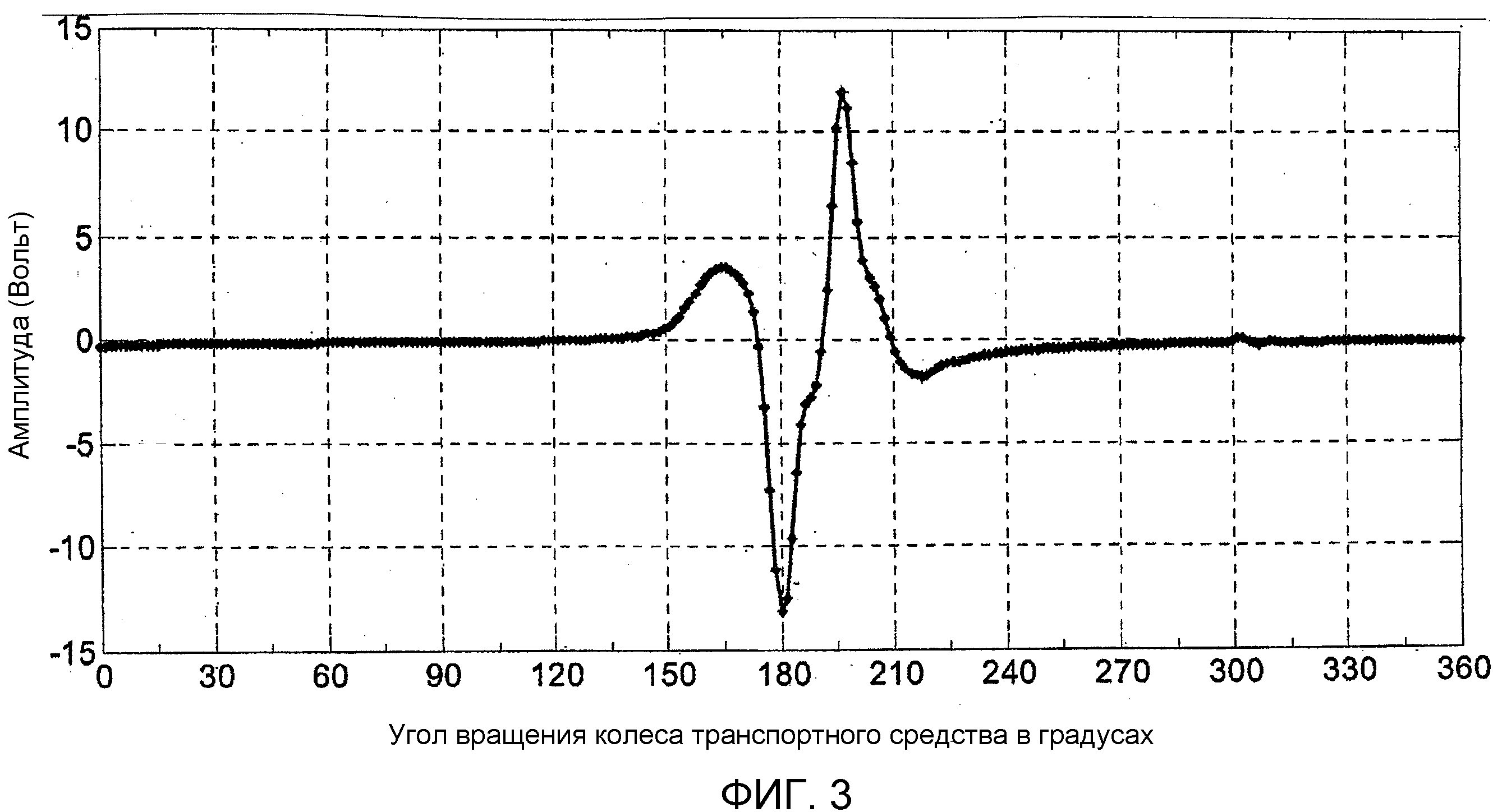
фиг.3 - характеристику измерительного сигнала пьезодатчика, установленного на колесе транспортного средства,
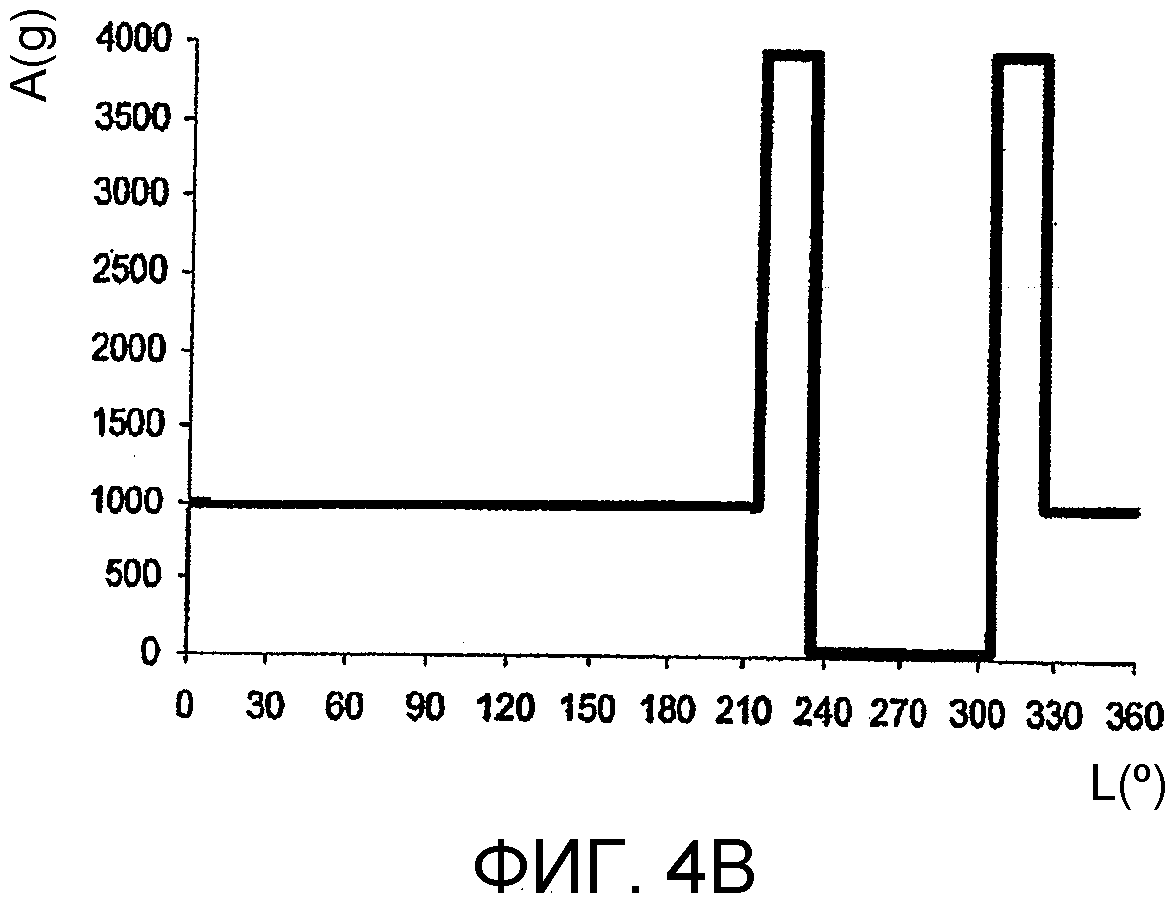
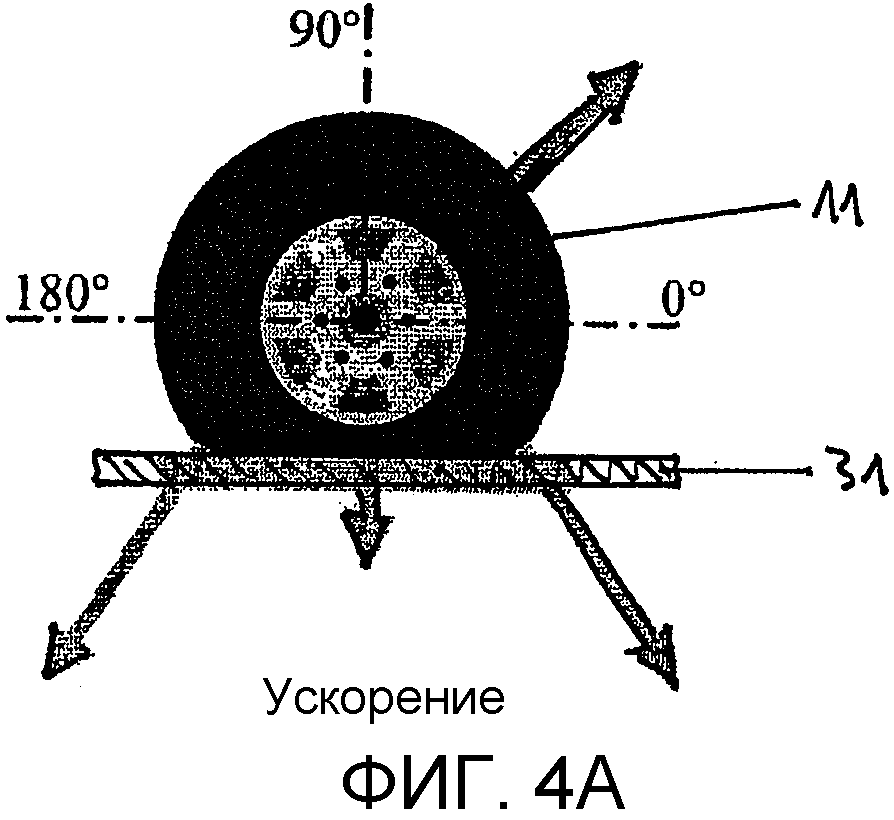
фиг.4А, 4В изображают схематично характеристику датчика ускорений для различных положений вращения колеса транспортного средства;
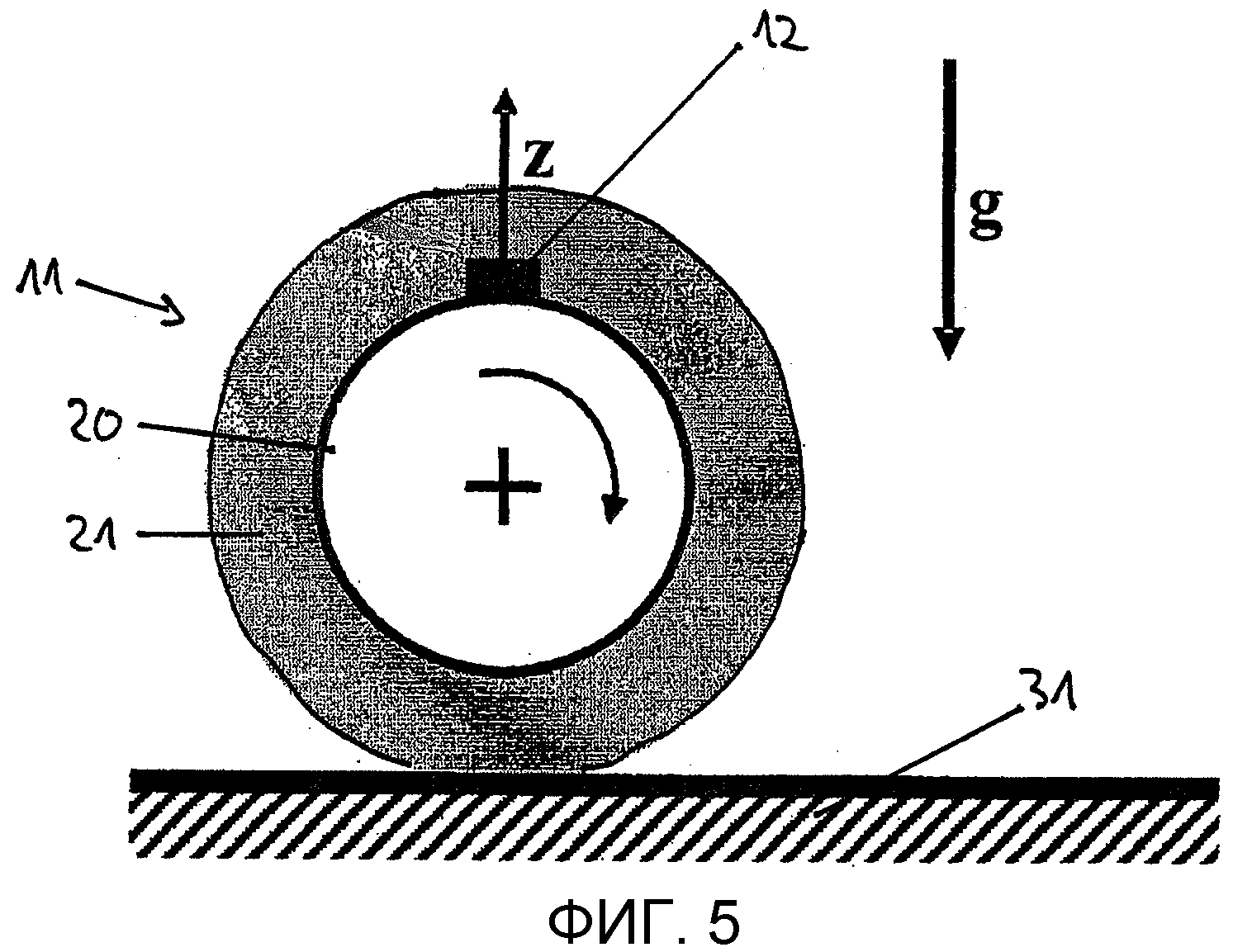
фиг.5 изображает датчик для колесной электроники, установленной на ободе;
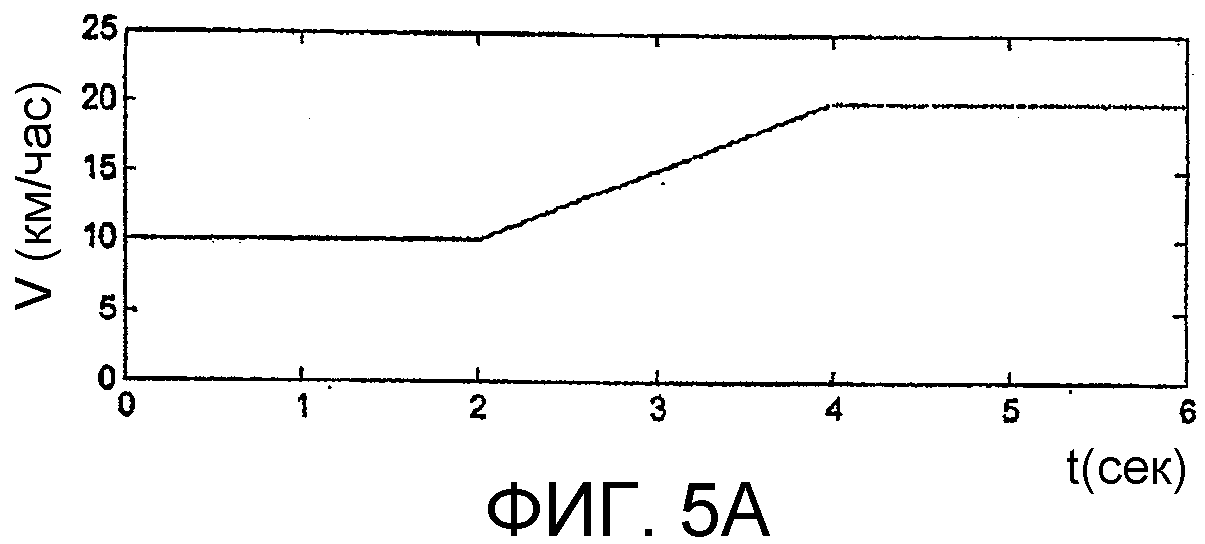
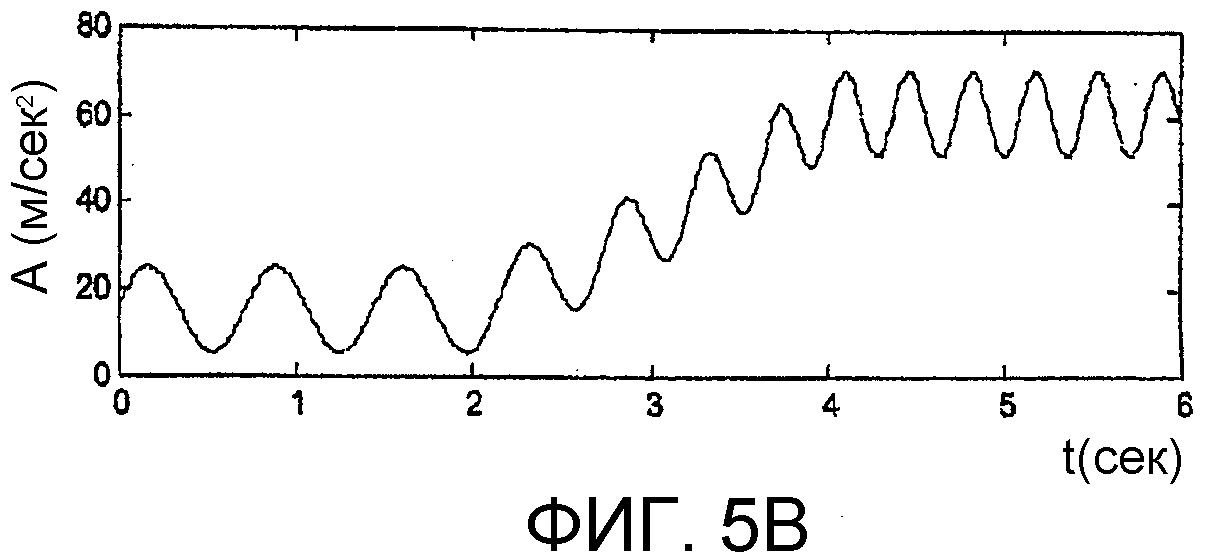
фиг.5А, 5В изображают скорость и ускорение в зависимости от времени для колесной электроники, установленной на ободе согласно фиг.5;
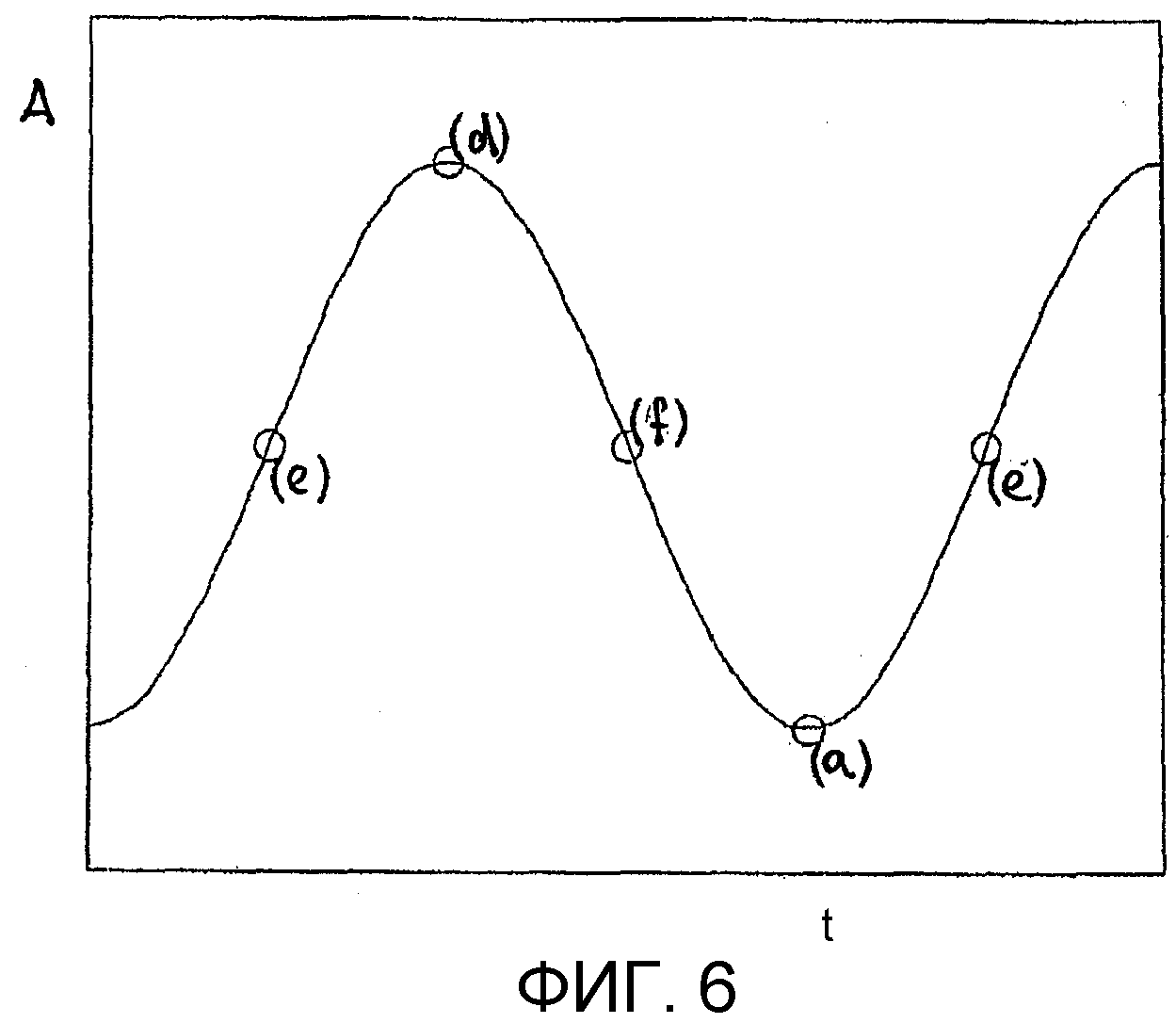
фиг.6 изображает полное колебание измерительного сигнала, получаемого датчиком ускорений;
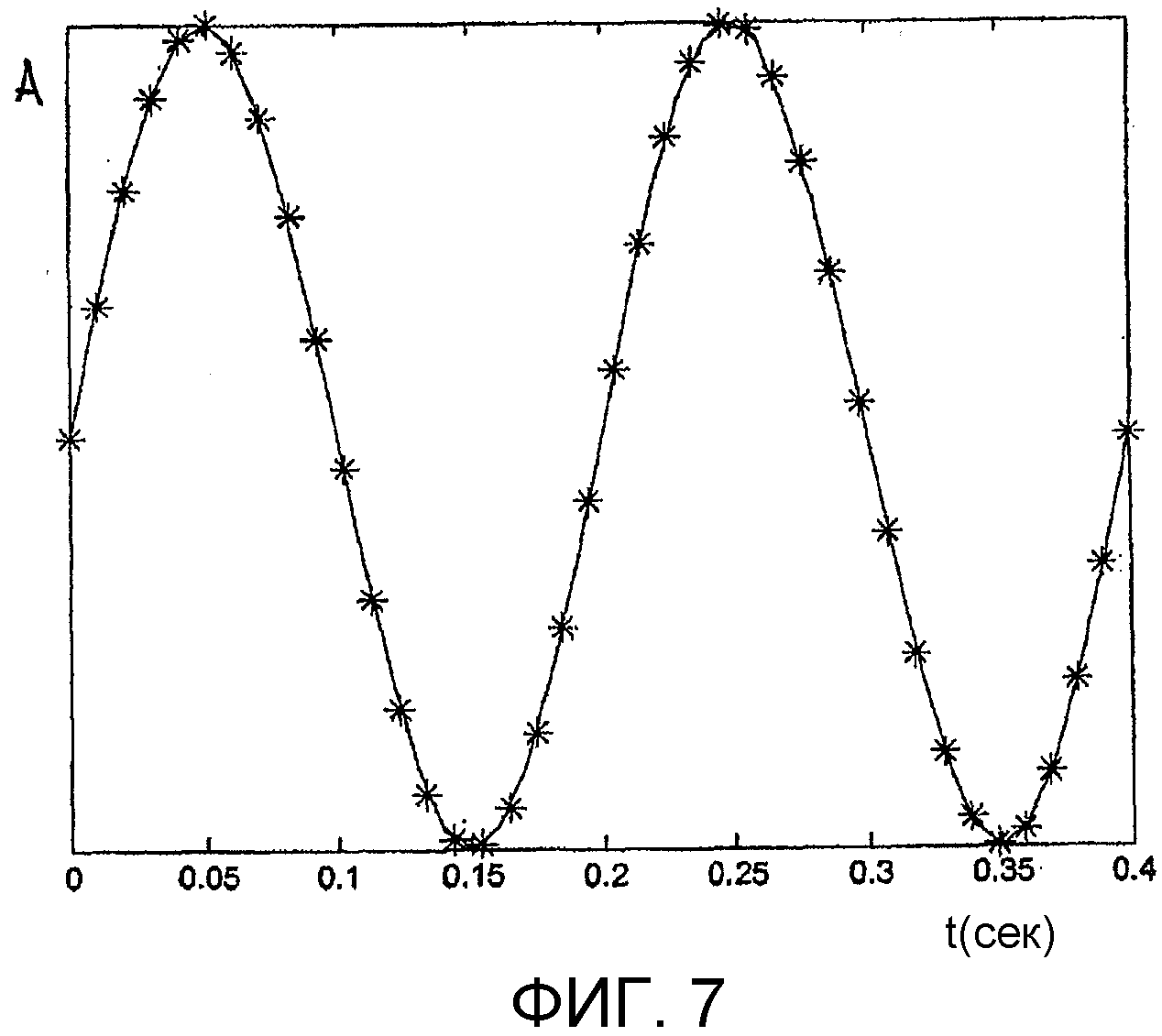
фиг.7 - типичный сценарий дискретизации для колебания измерительного сигнала, получаемого датчиком ускорений;
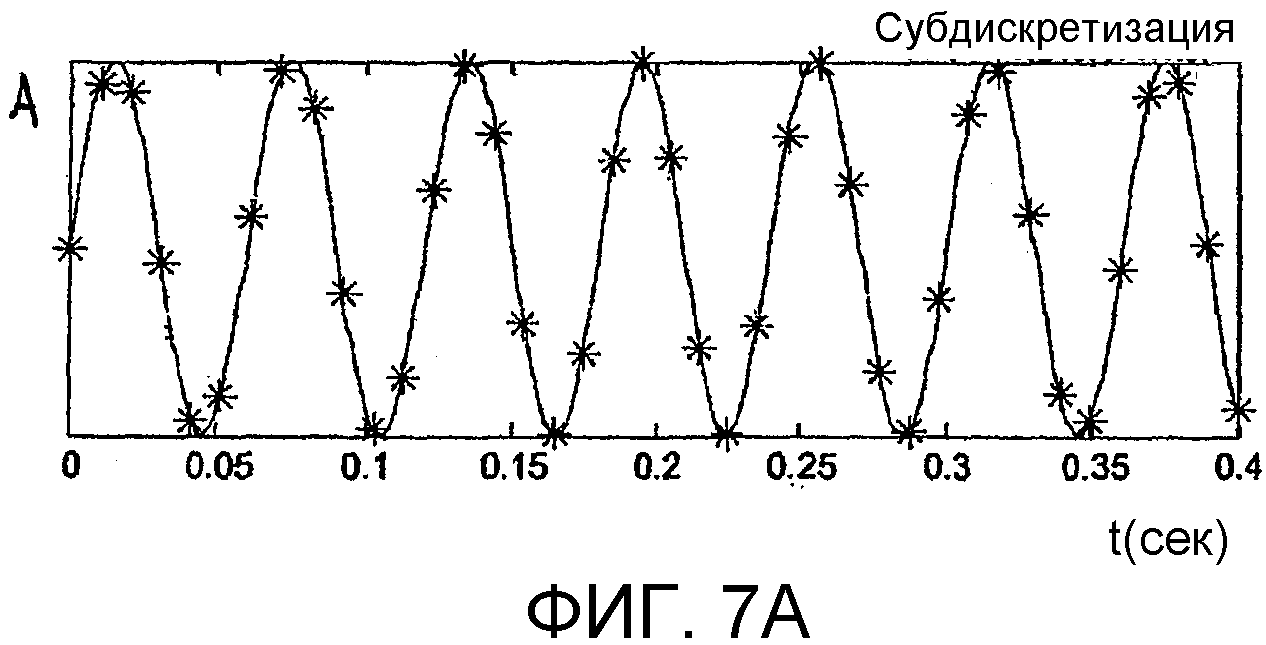
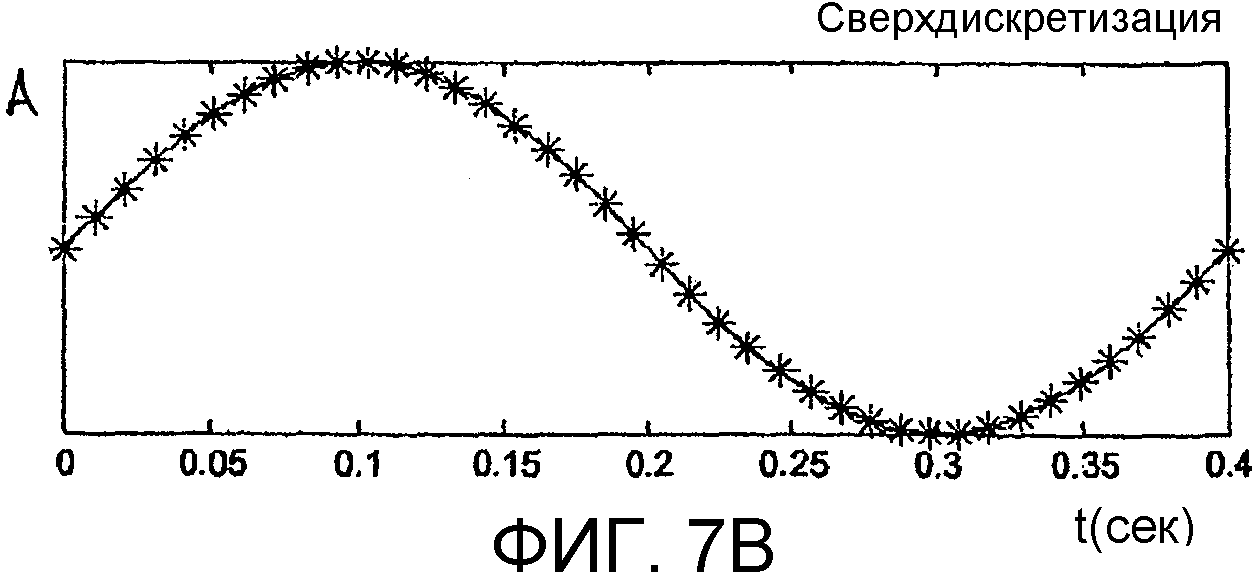
фиг.7А, 7В изображают сверхдискретизацию и субдискретизацию измерительного сигнала, получаемого датчиком ускорений;
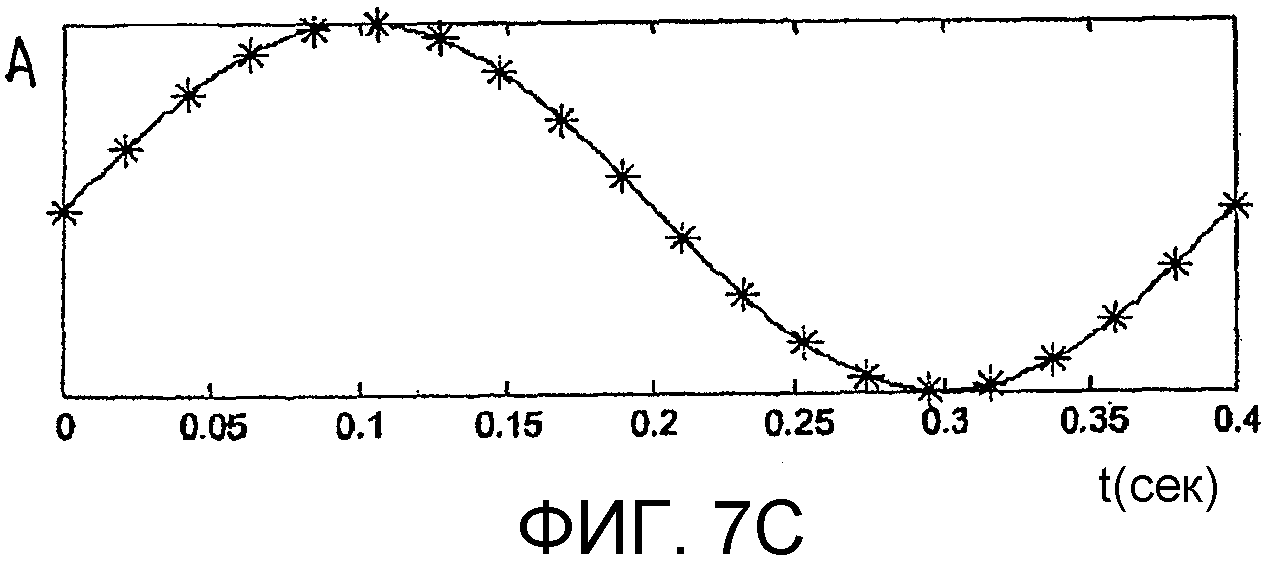
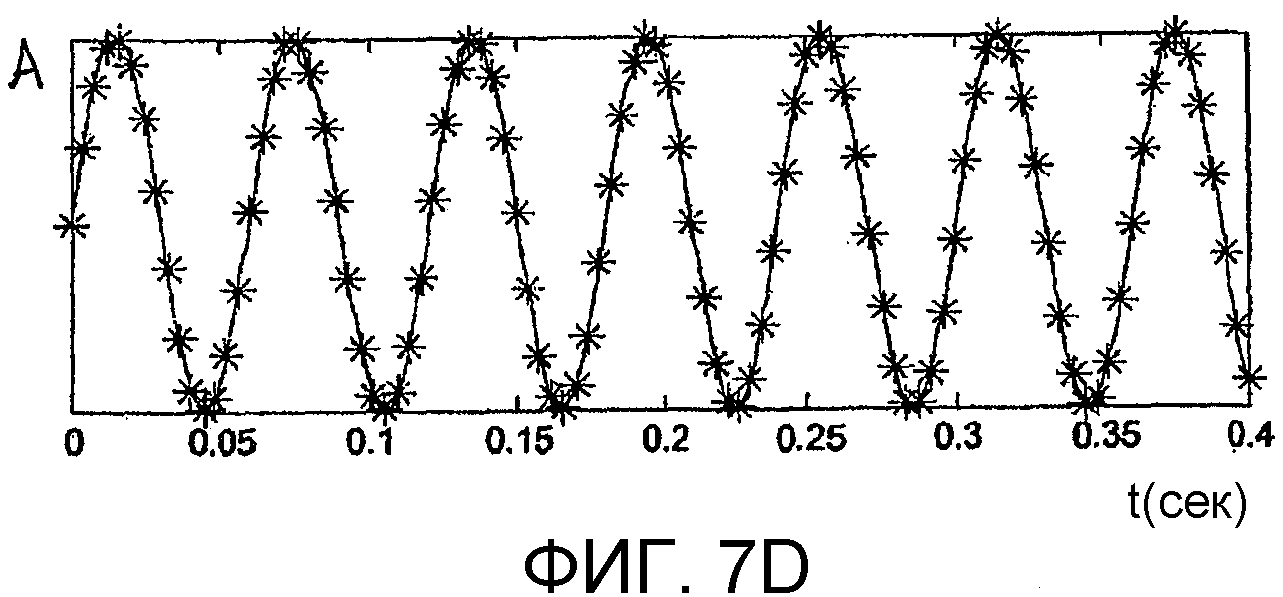
фиг.7С, 7D - адаптацию в случае сигналов на фиг.7А, 7В;
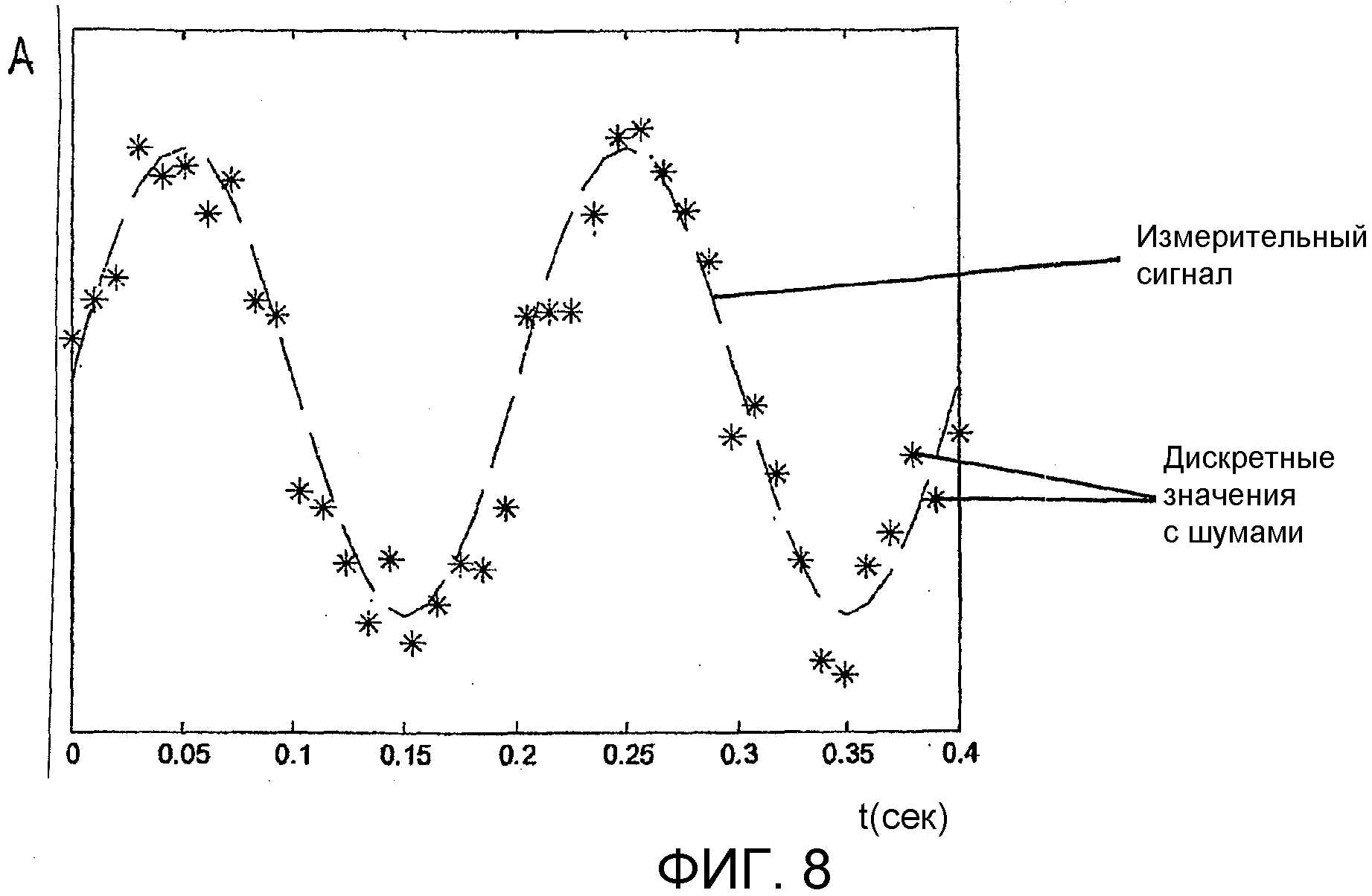
фиг.8 изображает измерительный сигнал с наложенным шумовым сигналом;
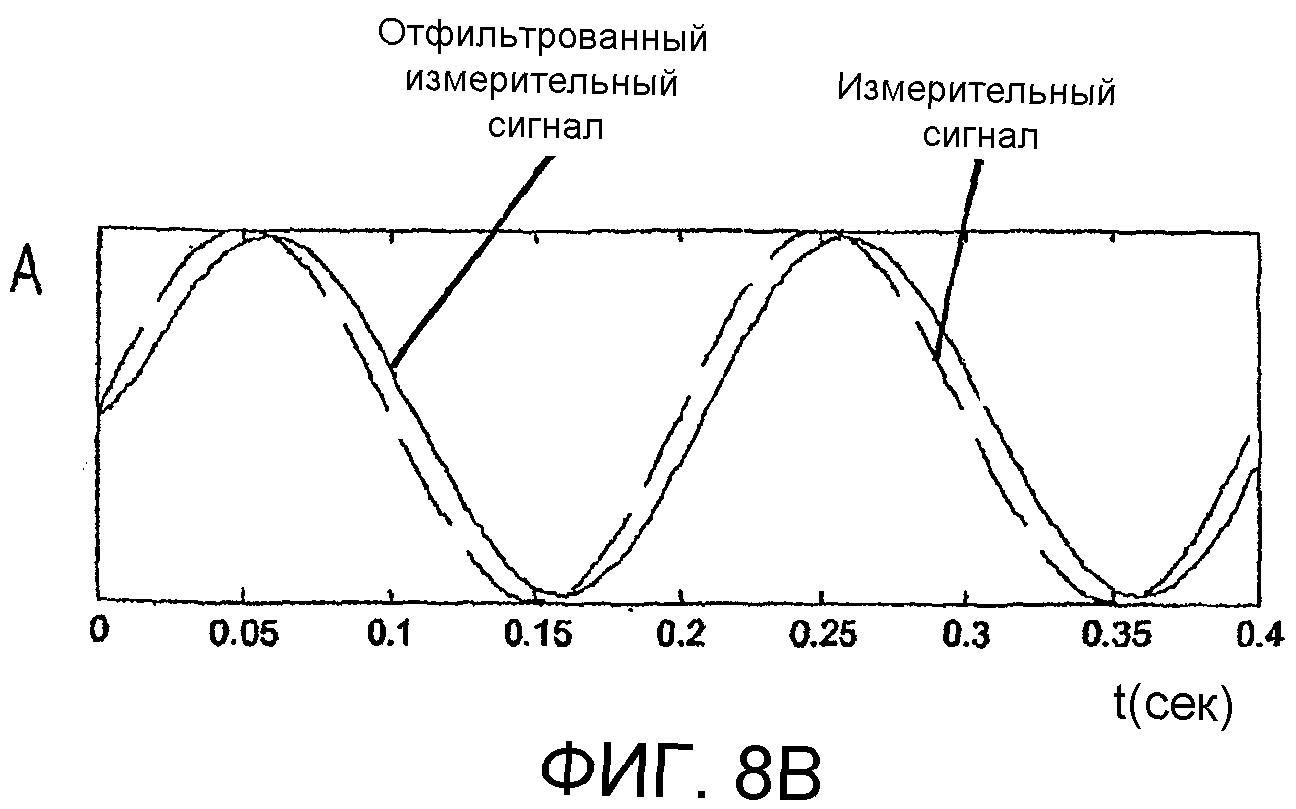
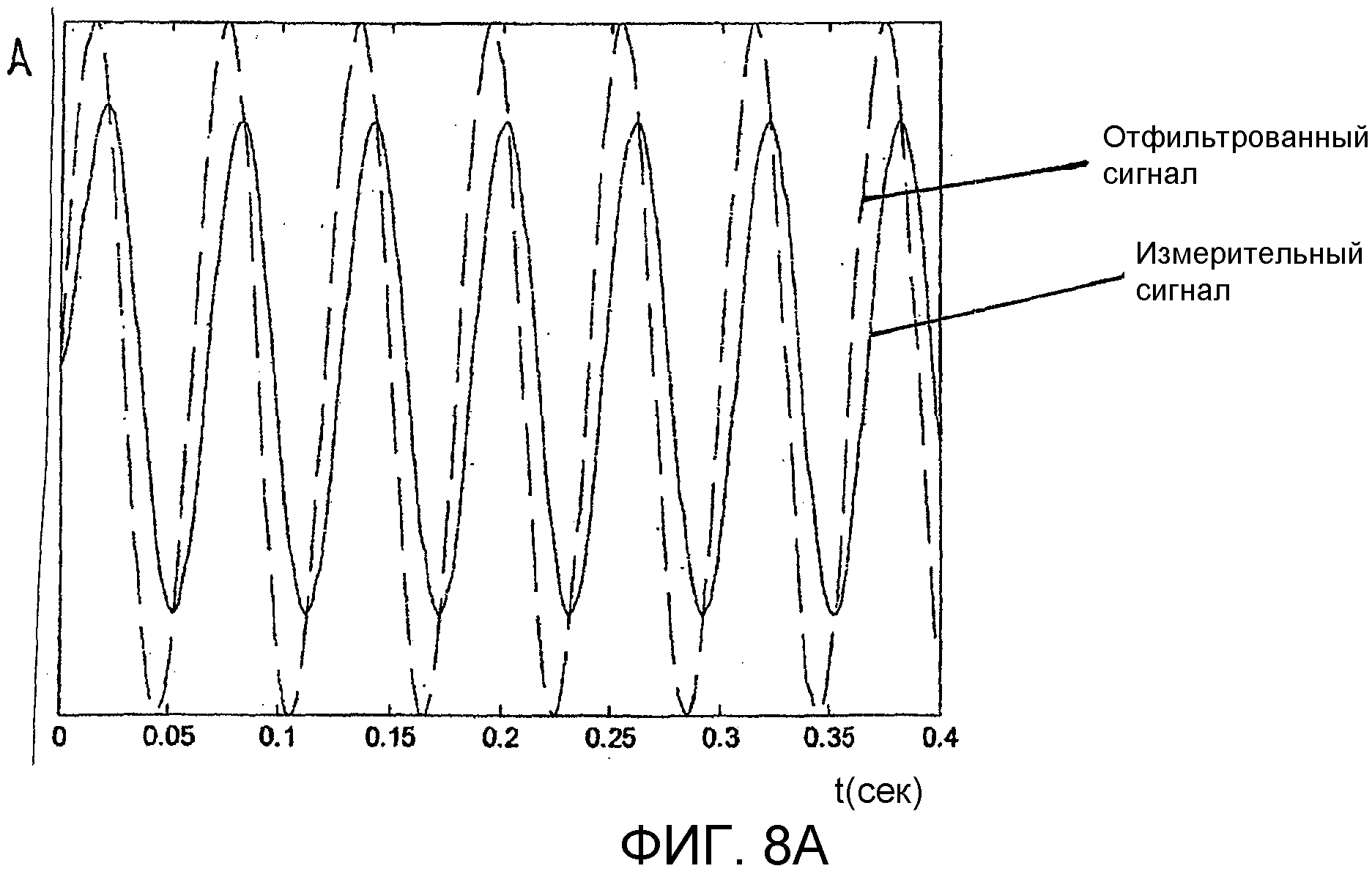
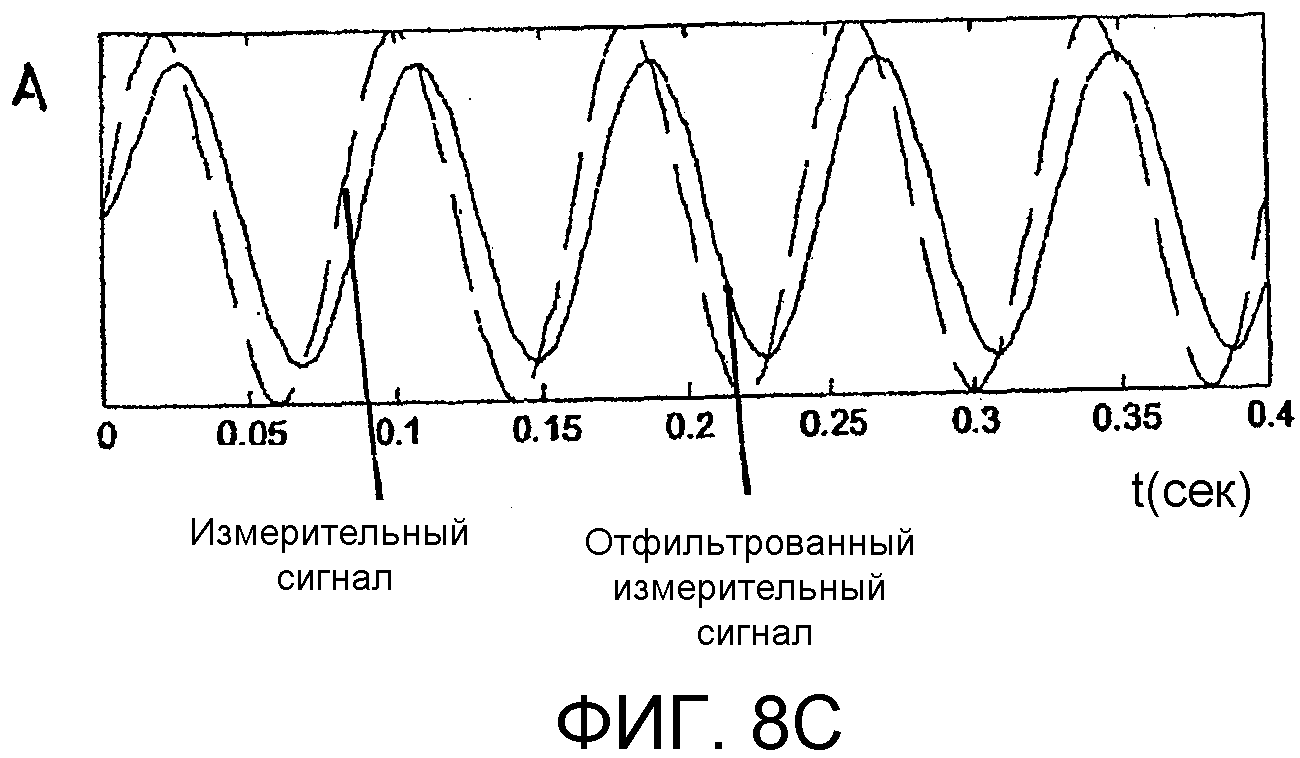
фиг.8А-8С изображают различные сдвиги по фазе измерительного сигнала в результате фильтрации;
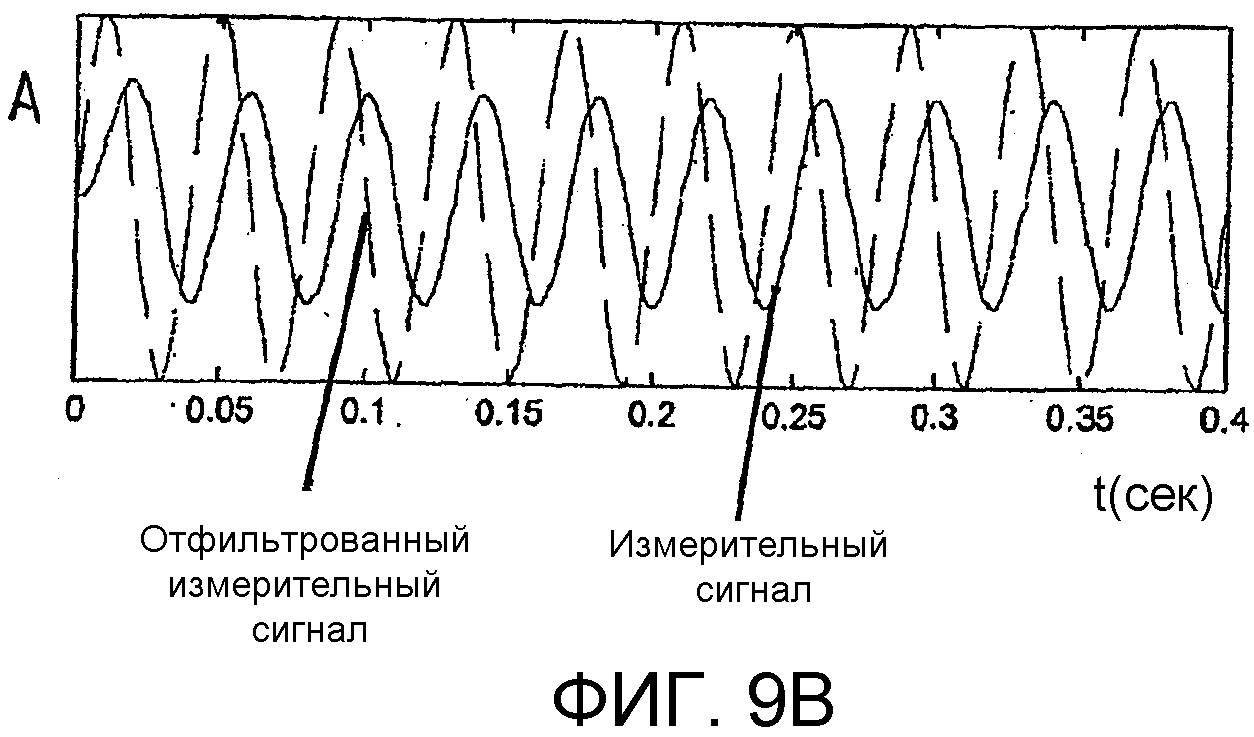
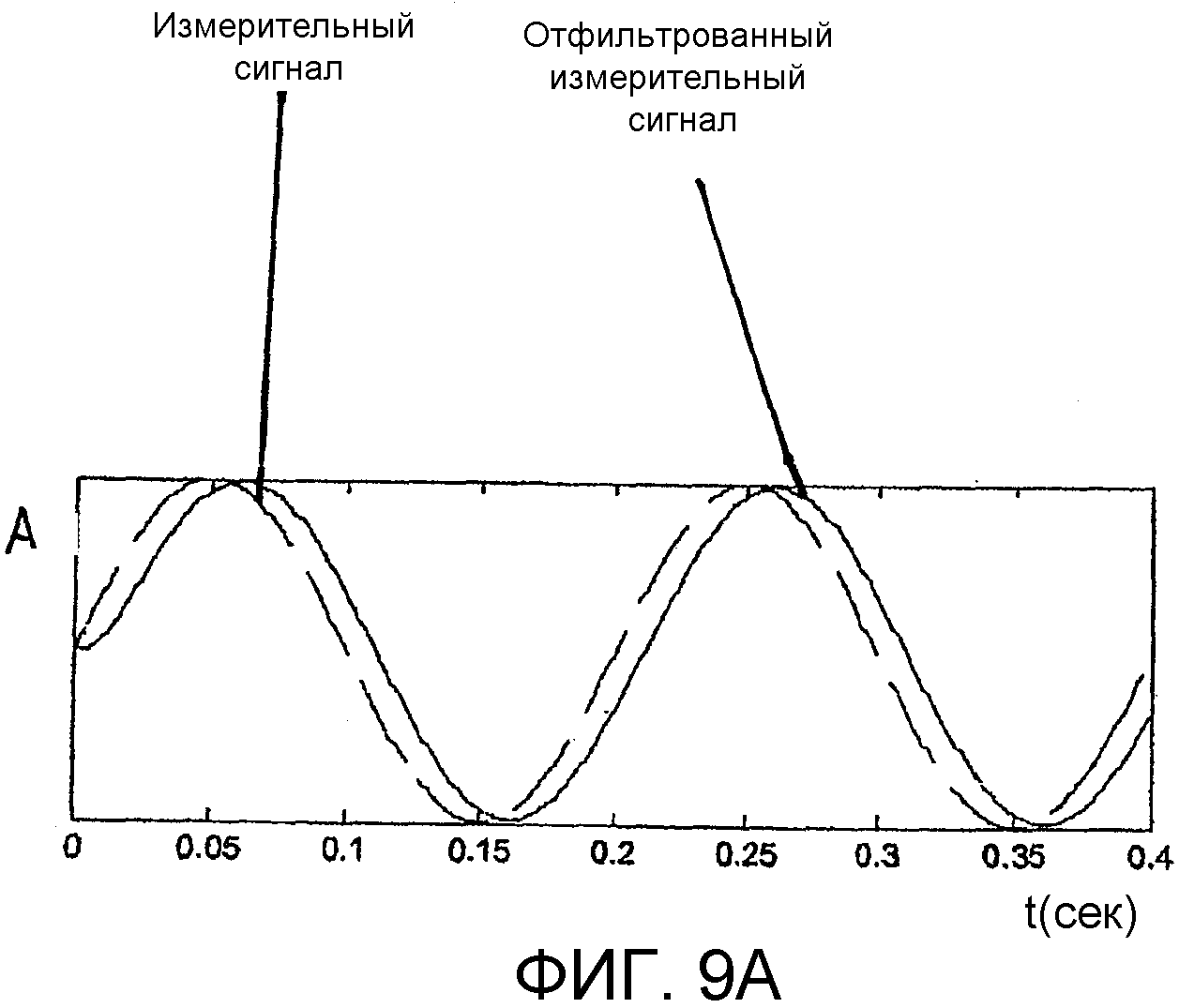
фиг.9А, 9В - пример влияния фильтра Бесселя на характеристику измерительного сигнала, получаемого датчиком ускорений, в зависимости от времени;
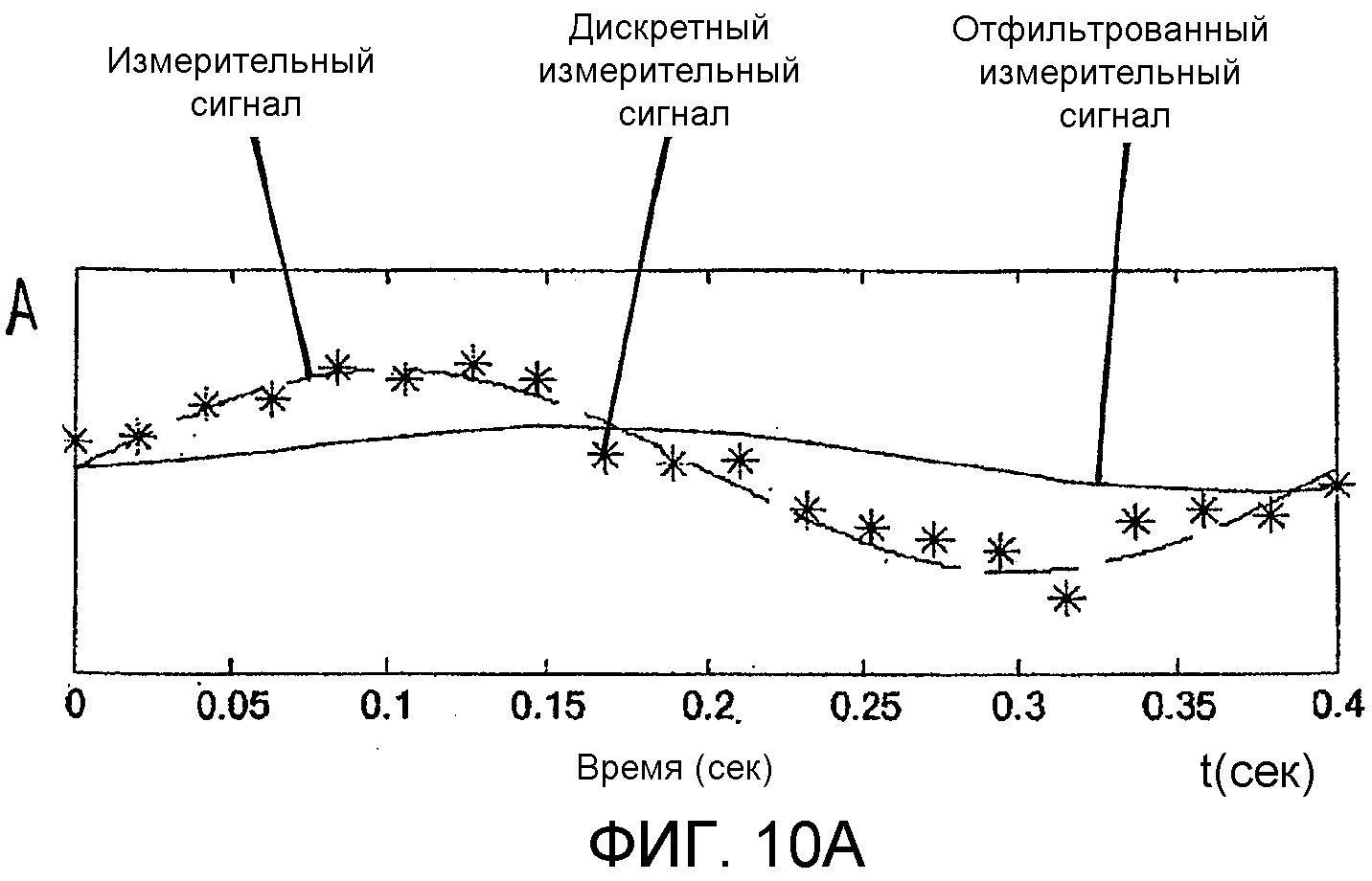
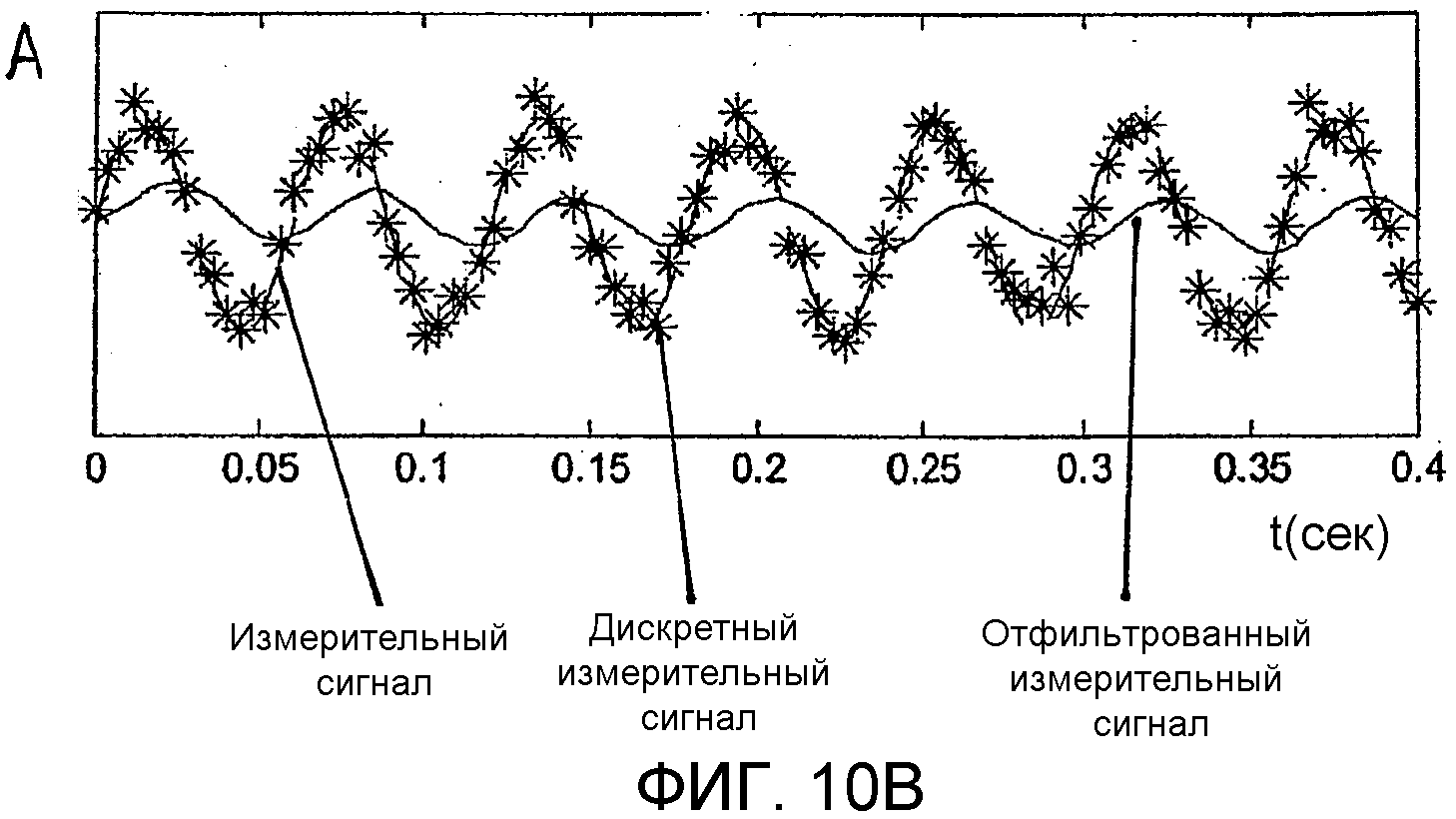
фиг.10А, 10В - пример характеристик сигналов ускорения в зависимости от времени, получаемых датчиком ускорений, с дискретизацией и фильтрацией;
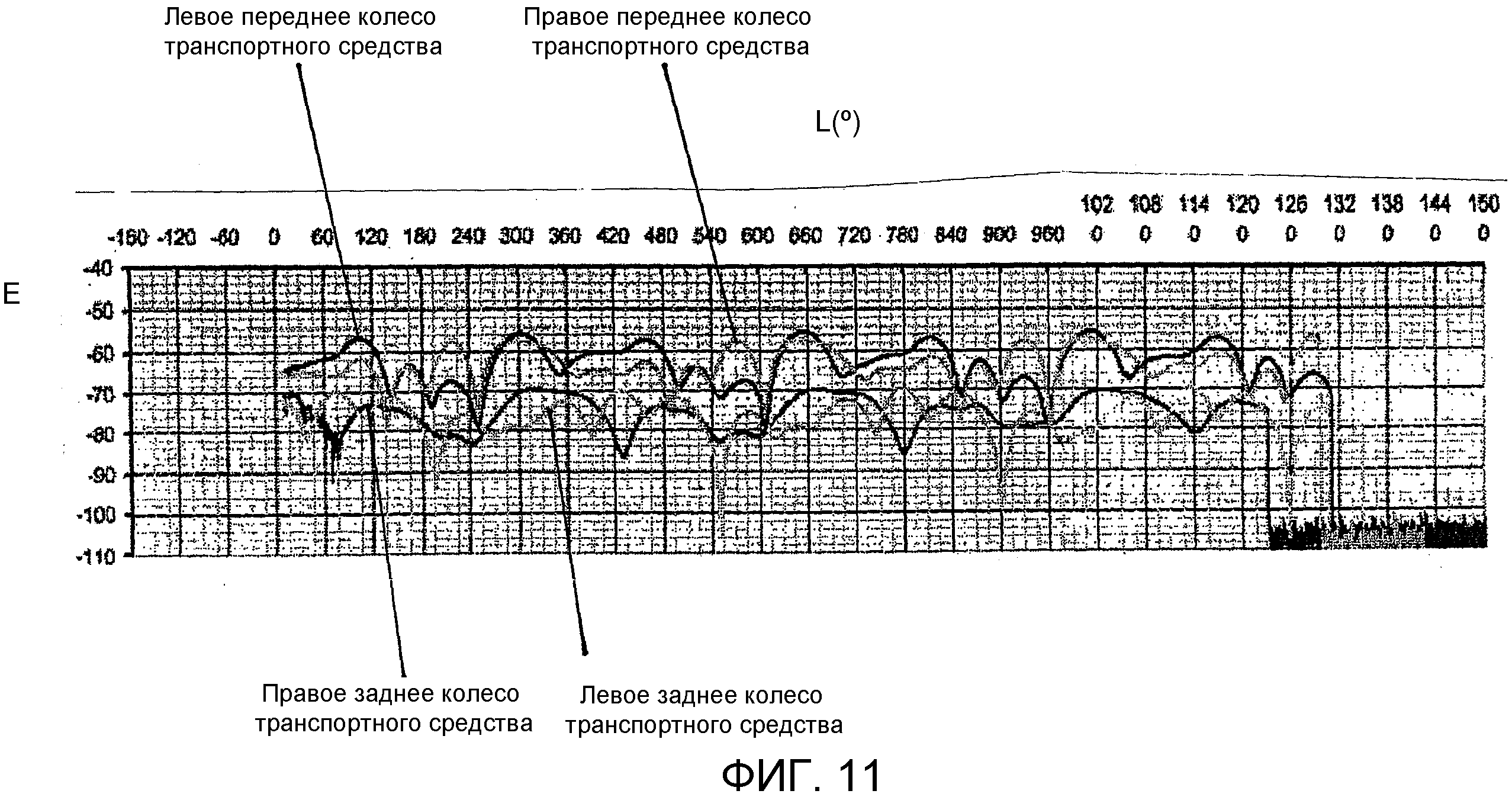
фиг.11 изображает характеристику напряженности поля сигналов, посылаемых четырьмя блоками колесной электроники транспортного средства;
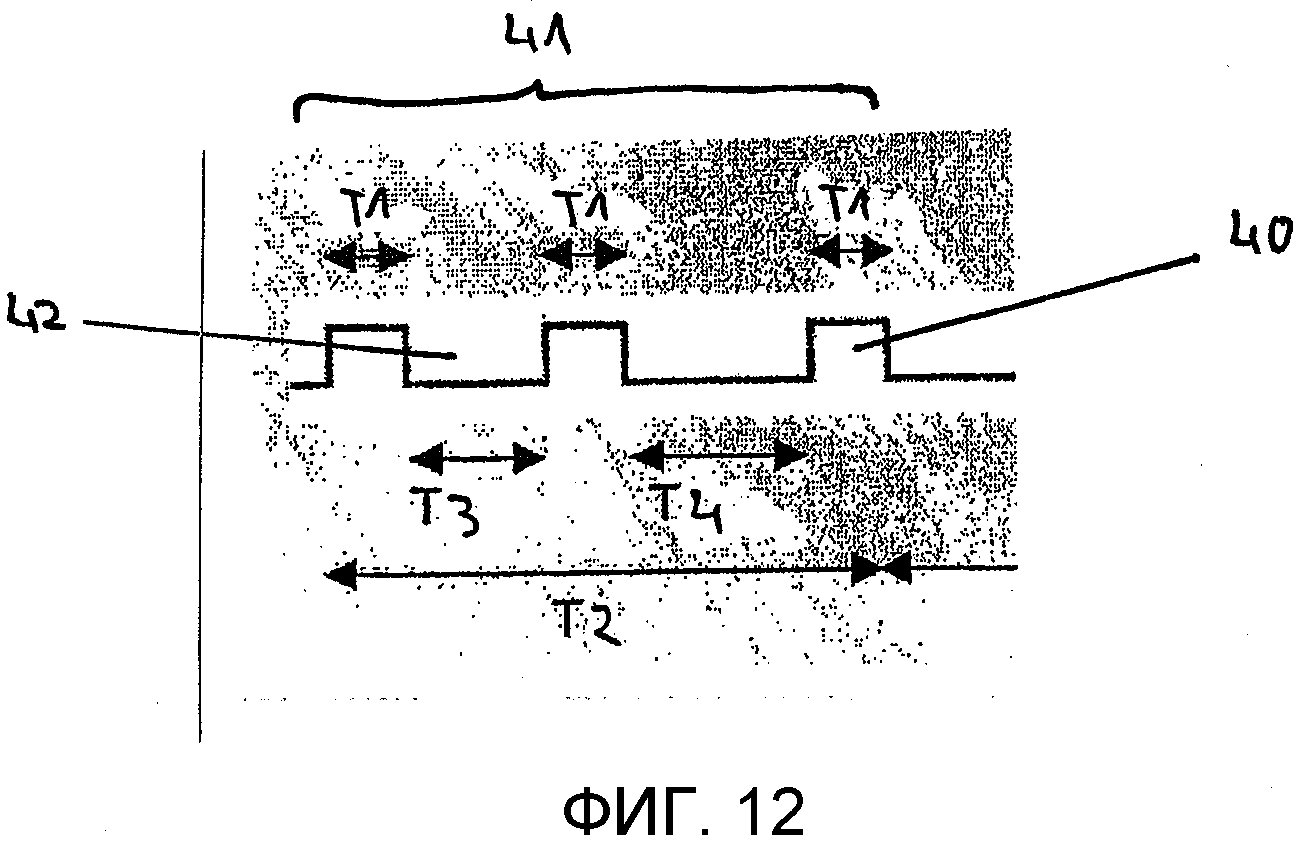
фиг.12 - разбиение сигнала, посылаемого колесной электроникой, на несколько блоков данных, образующих в совокупности пакет данных.
На фигурах с чертежами, если нет ничего другого, одинаковые и функционально одинаковые элементы обозначены, соответственно, одними и теми же позициями.
На фиг.1 схематично изображено транспортное средство, снабженное устройством для контроля за давлением в шине. Здесь транспортное средство, обозначенное позицией 10, содержит четыре колеса 11. Каждое колесо 11 снабжено колесной электроникой 12. В транспортном средстве каждому из этих блоков колесной электроники 12 выделено приемо-передающее устройство 13, соединенное, например, с соответствующей электроникой 12. Блоки колесной электроники 12 и приемо-передающие устройства 13 в совокупности являются составной частью шинного информационного устройства, которое, кроме того, имеет центральное устройство 14 управления. Это устройство 14 управления содержит, помимо этого, устройство 15 с программным управлением, например, микроконтроллер или микропроцессор, и запоминающее устройство 16, например, постоянную память (ROM) или дисковую память прямого доступа (DRAM). Кроме того, транспортное средство содержит информационную систему 17 водителя.
На фиг.1А, 1В схематично изображены колесо транспортного средства согласно изобретению и колесная электроника согласно изобретению, используемые, например, в транспортном средстве на фиг.1.
Колесо 11 транспортного средства, изображенное на фиг.1, содержит обод, на котором известным образом установлена шина 21 колеса. Колесная электроника 12 может быть установлена на ободе 20, например, в области вентиля. Кроме того, было бы также возможно, чтобы колесная электроника была установлена в области протектора шины внутри шины 21 колеса, например, с использованием зажимного устройства. Наконец, было бы также возможно, чтобы колесная электроника 12 была вулканизирована в резиновый материал шины 21 колеса.
Колесная электроника, изображенная на фиг.12, содержит в минимальном варианте датчик 22, рассчитанный на прием измерительного сигнала Х1, содержащего первый специфический параметр колеса. Этот измерительный сигнал Х1 подается в устройство 23 обработки данных, рассчитанное на определение по измерительному сигналу текущего положения вращения этой колесной электроники 12 относительно колеса 11 транспортного средства. Устройство 23 обработки данных выдает информационный сигнал Х2, содержащий информацию относительно переданного положения колеса 11 транспортного средства и при необходимости других специфических параметров колеса.
На фиг.1С изображен предпочтительный пример выполнения колесной электроники 12 согласно изобретению. Наряду с первым датчиком 22 и устройством 23 обработки данных здесь, кроме того, предусмотрены устройство 24 управления, а также передающее устройство 25. Устройство 24 управления принимает информационный сигнал Х2, выданный устройством 23 обработки данных, и в зависимости от этого с помощью управляющего сигнала Х3 управляет передающим устройством 25. Устройство 24 управления в зависимости от информационного сигнала Х2 может, например, установить, в какое время передающее устройство 25 должно передать информационный сигнал Х2 или производный от него сигнал. Сигнал, передаваемый передающим устройством 25, обозначен здесь как Х4.
Здесь колесная электроника 12 наряду с первым датчиком 22 содержит по меньшей мере один второй датчик 29, определяющий второй специфический параметр колеса, как, например, давление воздуха в шине или температуру шины, и в зависимости от этого подает в устройство 23 обработки данных другой информационный сигнал Х5. Предпочтительно, устройство 23 обработки данных содержит, кроме того, считывающее устройство 26, фильтр 27, а также фазосдвигающее устройство 28. С помощью считывающего устройства 26 осуществляется дискретизация аналогового информационного сигнала, выданного первым 22 или вторым датчиком 29. Посредством фильтрующего устройства 27 информационный сигнал Х2, Х5 до или после дискретизации фильтруется, а в фазосдвигающем устройстве 28 сдвиг по фазе, произошедший в фильтрующем устройстве 27, при необходимости компенсируется или по меньшей мере сокращается.
Идея, заложенная в основу настоящего изобретения, состоит в создании колесной электроники 12, определяющей положение вращения колесной электроники 12 относительно колеса 11 транспортного средства и передающей при определенном таким образом положении вращения или в другом положении, определенном в зависимости от положения вращения, например, на основе времени или угла, специфические параметры колеса, определенные колесной электроникой 12, в приемное устройство 13 транспортного средства. Для этого на фиг.2 изображены некоторые специальные положения 30 со ссылкой на покрытие проезжей части 31, на которое опирается колесо 11 транспортного средства. Предусмотрены могут быть, например, верхнее положение а, вход на отпечаток протектора шины b, выход с отпечатка протектора шины c, середина отпечатка протектора шины или низшее положение d, положение на 3 часа е или на 9 часов f. Кроме того, возможно любое другое фиксированное положение 30, не показанное на фиг.2.
На практике иногда случается, что ориентация колеса или заданное положение колеса не могут быть определены, если, например, сигналы сильно зашумлены. Это происходит, например, тогда, когда дорога, по которой едет транспортное средство, имеет большие неровности. Если ни ориентация, ни положение колеса не могут быть распознаны или же просрочено время периода распознавания, то это должно констатироваться колесной электроникой. В этом случаев в устройство управления для контроля, как правило, всегда отправляется еще радиотелеграмма с текущей информацией о шинах, как, например, о давлении воздуха в шине. Здесь в этом случае необходимо, чтобы колесная электроника указала в телеграмме, или передаваемом сигнале (Х4), что речь идет о передаче, не связанной с ориентацией. Это обычно осуществляется путем установки в телеграмме передаваемого сигнала бита 1 или 0. Этот бит известен также как флажок синхронизации. Таким образом, в устройстве управления обрабатывается только переданная информация, момент же радиопередачи для определения положения не анализируется.
Ниже описывается принцип функционирования и работы колесной электроники и входящего в нее датчика.
1. Ожидание предусмотренного момента передачи (так называемого излучения) для передачи передаваемого сигнала и соответствующей содержащейся в нем телеграммы. Поскольку колесная электроника осуществляет передачу не непрерывно, а радиорегулирование часто предписывает минимальный интервал между двумя последовательными излучениями, радиоэлектронике каждый раз приходится ожидать заданный квант времени для очередного излучения, например, 15 сек.
2. Обнаружение заданного положения колеса или положения вращения (т.е. углового положения колеса), при котором должен посылаться очередной сигнал (передаваемая телеграмма). В порядке альтернативы может определяться соответствующее положение колеса, которое затем должно передаваться в передаваемой телеграмме.
3. Если удалось определить заданное положение или положение вращения колеса, то флажок синхронизации устанавливается на 1. В противном случае флажок синхронизации устанавливается на 0.
4. Передача передаваемого сигнала телеграммой передатчика.
5. Возврат к шагу 1.
Таким образом, добиваются также передачи шинным датчиком необходимых данных, если не удалось добиться определения положения колес.
Для обнаружения положения 30 вращения или углового положения вращения в случае колесной электроники 12, смонтированной на ободе, а также на шине рассматриваются различные концепции:
- Колесная электроника 12 определяет свое положение 30 вращения на основе своего положения в колесной нише. Так, например, магнит может быть закреплен в каждой колесной нише. Когда шинная электроника 12 оказывается вблизи магнита, он может быть обнаружен, например, с помощью датчика Холла, герконового переключателя и т.п. Таким образом, получают опорное положение для датчика. В порядке альтернативы в колесной нише мог бы быть, вероятно, обнаружен и без того находящийся там предмет, например, демпфер.
- Колесная электроника определяет свое положение 30 вращения с помощью специального датчика положения или переключателя положения. Датчики положения (именуемые также датчиками регулирования положения) устанавливают путем измерений эталонных полей или эталонных точек (например, магнитного поля в области колесной ниши) положение и ориентацию колеса 11 транспортного средства в трехмерном пространстве, в большинстве случаев относительно транспортного средства 10 или дорожного полотна 31.
- В случае колесной электроники 12, встроенной в шину, которая (в отличие от встроенной в обод) устанавливается, например, с внутренней стороны протектора шины 21 (см. фиг.1А), имеется дополнительная возможность обнаружения входа на отпечаток протектора шины и выхода с него. Это может быть достигнуто, например, с помощью датчиков ускорения или шок-датчиков. Датчик ускорений является датчиком или чувствительным элементом, измеряющим ускорение, для чего он измеряет силу инерции, действующую на пробную массу (например, на колесо транспортного средства или на обод). Таким образом можно, например, определить увеличение или уменьшение скорости. Датчик ускорений относится к группе инерциальных датчиков. Такие инерциальные датчики служат для измерения линейных сил ускорения и сил вращения.
Однако использованы могут быть также пьезодатчики, измеряющие изменение кривизны шины. Здесь могут быть использованы либо пьезодатчики, чувствительные к давлению, либо пьезодатчики, обнаруживающие деформацию пьезоштабеля, например, изгиб, растяжение, обжатие и т.д. Пьезодатчики имеют то дополнительное преимущество, что их выходное напряжение может быть использовано в качестве пускового сигнала для устройства управления колесной электроники 12. Благодаря этому отпадает необходимость в постоянном активном опросе датчика 22, что предотвращает большой расход энергии. Это предпочтительно, поскольку датчики, предусмотренные в колесной электронике, нуждаются в автаркическом энергоснабжении, например, в батарее, аккумуляторе, генераторе энергии и т.п. Особенно предпочтительно, чтобы пьезодатчик, например, и без того предусмотренный для измерения давления в положении входа на отпечаток протектора шины дополнительно использовался для энергоснабжения шинной электроники.
На фиг.3 изображена характеристика сигнала, принимаемого пьезодатчиком, установленным в колесе транспортного средства. Он измеряет деформацию шины с внутренней стороны ее протектора. Пики в принимаемых измерительных сигналах идентифицируют вход датчика на отпечаток протектора и его выход с отпечатка протектора. Эти положения могут определяться путем обнаружения пиков. Это возможно, например, посредством простого отслеживания порогов или нахождения минимумов и максимумов.
На фиг.4А, 4В схематически изображена характеристика измеренного ускорения А датчика ускорений, установленного в шине на протекторе, в зависимости от угла α вращения колеса транспортного средства. В измерительном сигнале видны большие пики, когда датчик входит на отпечаток протектора (положение b) и выходит из него (положение с), т.е. при 240 и 300°. Итак, здесь эти положения b, с можно также определить следующим образом.
- Анализ продольного ускорения (ускорения/торможения) транспортного средства с помощью датчика ускорений или шок-датчика в шинной электронике: таким образом могут быть, например, обнаружены высшее положение а, низшее положение d, положение е, f на 3 часа или 9 на часов. Правда, возникающие ускорения, как правило, малы и возникают также лишь в зависимости от дорожной ситуации.
- Анализ проекции вектора гравитации на датчик ускорений или же на шок-датчик в шинной электронике: в зависимости от анализа результирующей синусоидальной волны (нахождение максимумов, нахождение минимумов, нахождение проходов нуля) могут быть определены, например, низшее или высшее положения а, d, а также положения е, f на 3 часа или на 9 часов. Эти ускорения возникают при любом вращении и потому могут использоваться как хорошо воспроизводимые.
На шинный датчик с датчиком ускорений в направлении Z (т.е. в радиальном направлении) действуют, с одной стороны, центробежное ускорение, вызываемое вращательным движением колеса транспортного средства, а, с другой стороны, гравитация. Ниже поясняется анализ измерительного сигнала на основе гравитации:
На фиг.5 изображен датчик для колесной электроники, установленной на ободе, который, однако, может быть использован для колесной электроники, установленной на шине. Видно, что скорость V имеет большую постоянную составляющую в сигнале А ускорения (см. 5А, 5В) и что сигнал (фиг.5В) ускорения промодулирован колебанием с амплитудой около 1g. Кроме того, видно, что частота колебаний зависит от скорости транспортного средства. Чем больше скорость транспортного средства, тем больше частота вращения колеса и тем меньше становится период обращения при вращении. На основе положения в рамках этих колебаний можно считывать положение вращения датчика. Для этого ниже описываются разные способы.
В качестве альтернативы датчику ускорений может быть использован также шок-датчик. Последний измеряет не ускорение, а его производную. В шок-датчике по сравнению с кривой на фиг.5В кривая производной производит колебание без среднего значения, которое, однако, имеет также изменяющиеся периоды колебаний. Период идентичен периоду сигнала, измеряемого датчиком ускорений. Соответственно, в этом случае могут быть определены также определенные положения сигнала шок-датчика. В отличие от датчика ускорений нельзя сделать никакого абсолютного вывода в отношении величины ускорения.
На фиг.6 изображено полное колебание измерительного сигнала, принимаемого датчиком ускорения.
Для обнаружения положений вращения необходимо проанализировать регистрируемое колебание. При этом положения, изображенные на фиг.2, соответствуют, например, следующим положениям колебания датчика ускорений. Положение d на фиг.6 определено, например, в качестве локального максимума, положение а - в качестве локального минимума, а положения е и f характеризуются как возрастающие или убывающие переходы колебания через нуль. Эти положения могут быть установлены путем дискретизации и анализа значений ускорения кривой. При этом для достаточно точного воспроизведения искомого положения необходимо, чтобы кривая дискретизировалась достаточно часто.
На фиг.7 изображен типичный сценарий дискретизации. Колебание может иметь достаточно точное разрешение, если период дискретизируется с получением примерно 10-30 значений.
На фиг.7А, 7В показано, как периоды колебаний зависят от скорости транспортного средства или колеса. Из постоянства периода дискретизации следует, что колебание в различных интервалах скорости проходит сверхдискретизацию и субдискретизацию. Субдискретизация (фиг.7А) в общем случае ведет к ухудшению распознавания определенных положений вращения. Сверхдискретизация (фиг.7В) вызывает увеличение потребности в памяти для сканированных значений колебания и к увеличению потребности в энергии, поскольку каждое сканирование означает соответствующее считывание показаний датчика ускорений. Поскольку колесная электроника должна снабжаться энергией или из батареи, или из генератора энергии, а количество энергии, имеющейся в распоряжении, ограничено, то это нежелательно.
Поэтому особенно предпочтительным является адаптивный выбор периода дискретизации, как это показано на фиг.7С, 7 D. Период дискретизации определяется в соответствии со скоростью транспортного средства и периодом колебаний. Период дискретизации определяется в результате оценки абсолютной величины параметра ускорения разгона (центробежная составляющая плюс модулированное колебание). Центробежная компонента, как и период колебаний, зависят от скорости вращения колеса транспортного средства. Если абсолютные величины ускорения отсутствуют, так как используется, например, шок-датчик, период колебаний можно определить на первом шаге, например, путем нахождения перехода через нуль, а затем, основываясь на этом, установить период дискретизации. Оба способа исходят из того, что периоды колебаний изменяются не молниеносно, а лишь слегка варьируются в течение нескольких оборотов колеса. Поскольку транспортное средство может разгоняться и тормозить лишь в ограниченном объеме, этот способ также допустим. Кроме того, колебание все же может иметь достаточно хорошее разрешение, если количество моментов дискретизации за период находится в определенном допустимом диапазоне. Это существенно, поскольку период дискретизации на практике не может быть выбран совершенно произвольно, а устанавливаться могут лишь определенные величины (на основании синхронизации колесной электроники).
Распознавание положений, например нахождение максимумов колебаний, вполне возможно на основе дискретизации, как это показано на фиг.7А-7D. Для нахождения максимумов, минимумов и переходов через нуль могут быть использованы также простые алгоритмы. Однако в действительности имеют место измерительные сигналы, на которые наложены шумы, так что перед дискретизацией и анализом необходима фильтрация.
На фиг.8 изображен измерительный сигнал, на который наложен шумовой сигнал. Штриховая линия показывает принятый за основу аналоговый измерительный сигнал, выполненный в виде синусоидального сигнала. Точки отсчета на фиг.8 содержат наложенные шумы.
Фильтрация измерительного сигнала приводит к сглаживанию, которое снова обеспечивает анализ и тем самым распознавание желательных положений вращения. Однако фильтрация имеет нежелательный побочный эффект сдвига по фазе. Это показано на фиг.8А на основе синусоидального колебания (без шумов). На фиг.8А видно, что фильтрация действует на амплитуду колебаний, вследствие чего колебание задерживается и тем самым сдвигается. Однако на определение положения в рамках колебаний это не имеет никакого влияния, пока колебание может иметь хорошее разрешение. Важным является лишь сдвиг по фазе. В общем случае этот сдвиг по фазе был бы несущественным для режима обнаружения, поскольку обнаруженное положение при выбранном фильтре всегда будет одинаковым. Однако это относится только к фиксированной частоте колебаний. При реальном дорожном сценарии, при котором имеют место разные скорости и потому разные частоты колебаний, это приводит к разным сдвигам по фазе и создает тем самым проблемы.
Обнаружение (например, максимума) на фиг.8В, 8С с помощью сплошных линий приводит к разным положениям заштрихованных колебаний на выходе. На фиг.8С угловое смещение, например, существенно больше. Это связано с тем, что сдвиг по фазе зависит от частоты колебаний. Теоретически для алгоритма обнаружения было бы возможно определять и компенсировать соответствующий сдвиг по фазе на основе текущей частоты. Однако это требует точного знания частоты колебаний и требует больших затрат на вычисления, что выражается в затратах на энергоресурсы.
В принципе, существуют две возможности обойти фазовый сдвиг:
С одной стороны, входной сигнал мог бы фильтроваться с помощью одного и того же фильтра дважды, один раз раньше по времени, а затем позже по времени. Сдвиг по фазе, получаемый в результате первой фильтрации, исключается второй фильтрацией, так что окончательный выходной сигнал не имеет больше никакого сдвига по фазе. Правда, входной сигнал и промежуточный результат должны сначала записаться, чтобы затем отфильтроваться позже. Это вызывает дополнительную потребность в памяти и ведет к тому, что обнаруживаемое положение можно обнаружить лишь по истечении довольно длительного времени обработки. Это означает, что анализ принимаемого измерительного сигнала колесной электроники синхронно с прохождением обнаруживаемого положения вряд ли может быть реализован. Кроме того, из-за двойной фильтрации удваивается также эффективная система фильтра.
В порядке альтернативы было бы предпочтительно использовать фильтры, имеющие (приближенно) постоянный сдвиг по фазе во всем диапазоне частот, представляющем интерес для анализа. Такими фильтрами являются, например, фильтры Бесселя, являющиеся линейными по фазе. Это способствует постоянному по времени сдвигу отфильтрованных кривых измерения для всех частот колебаний на входе. Таким образом, этот постоянный сдвиг может быть учтен для всех измерительных сигналов, принимаемых датчиками, и скомпенсирован с помощью алгоритма компенсации в устройстве управления транспортного средства. На фиг.9А и 9В в качестве примера показаны характеристики фильтра Бесселя. Характеристика выполнена таким образом, что разница во времени, например, максимумов входного сигнала и максимумов отфильтрованного сигнала является приблизительно одинаковой.
Проблема сдвига по фазе лучше всего решается за счет того, что используется адаптивный период дискретизации, а дискретный сигнал фильтруется на основе дискретизации (см. фиг.10А, 10В). Тем самым исключается зависимость первоначального вектора времени. На фиг.10А, 10В видно, что отфильтрованный сигнал в обоих случаях пересекает первоначальный измерительный сигнал в одном и том же месте, что позволяет сделать заключение о постоянстве задержки по фазе (т.е. по углу), а не по времени. Если отыскивается, например, максимум отфильтрованного сигнала, то он на фиг.10А и 10В находится в одной фазе с входным сигналом. Задержка в виде постоянной фазы - независимо от скорости движения или частоты колебаний - имеет то преимущество, что обнаружение положения вращения просто смещено на постоянный угол. Поскольку в случае способа определения местоположения речь идет не об абсолютном положении, а лишь об относительных взаимозависимостях, это свойство является весьма предпочтительным, и адаптации алгоритма не требуется.
При передачах сигналов передатчика существуют так называемые «темные пятна» («Black spots»). При этом речь идет об угловых положениях колеса транспортного средства, в которых прием полного передаваемого сигнала (так называемой телеграммы) приемником транспортного средства затруднен или вообще невозможен. Это объясняется тем, что линия радиосвязи между колесом транспортного средства и кузовом транспортного средства, например, через детали кузова, как, например, колесная ниша, прерывается.
На фиг.11 изображена характеристика напряженностей Е поля сигналов, получаемых от блоков колесной электроники четырех колес. Можно заметить, что напряженности 4 поля сильно зависят от угловых положений α колеса. Если теперь необходимый порог для качественного приема передаваемого сигнала составляет, например, около 85 дБм, сигнал, переданный колесной электроникой левого переднего колеса в положении около 190°, может быть не получен. Если, однако, все время необходимо посылать сигнал именно в этом положении или, например, при приблизительно 180° (колесо во время передачи продолжает крутиться дальше), то прием этого передаваемого сигнала был бы невозможен.
Поэтому иногда предпочтительно не излучать передаваемые сигналы все время в одном и том же положении вращения, а производить, например, произвольную, статистически распределенную задержку. При этом определенное положение все же распознается, однако после распознания определенное время уходит на ожидание. При последующей передаче передаваемого сигнала время ожидания передается как информация, так что приемное устройство может снова вычислить это время ожидания. Основой времени ожидания могут быть или время, или угол, например, в зависимости от того, что лучше реализуется в колесной электронике с точки зрения выполнения алгоритма. Так, например, одинаковое количество интервалов дискретизации при адаптивном периоде дискретизации в хорошем приближении соответствует задержке на основе угла. При выборе времени задержки целесообразно иметь заданный набор значений, пробегаемый последовательно или выбор из которого делается случайным. Это позволяет распределять передачу сигналов статистически равномерно на все 360° колеса транспортного средства.
На практике снова и снова может случиться, что отдельные передачи принимаются некорректно, например, из-за радиопомех или гашения передаваемыми сигналами других блоков колесной электроники. По этой причине иногда предпочтительно передавать информацию блоков колесной электроники с избытком. Сообразно этому передаются отдельные блоки передаваемых сигналов, содержащие идентичную информацию. На фиг.12 показано, как три блока 40 данных длительностью Т1 образуют так называемый пакет 41 с длительностью Т2 передаваемого измерительного сигнала. Между отдельными блоками 40 данных пакета 41 имеются предопределенные интервалы различной или одинаковой длительности Т3, Т4, которые, в свою очередь, обеспечивают по возможности равномерное распределение блоков данных по окружности в 360°.
Поэтому в рамках передач на основе положения со стороны блоков колесной электроники этот способ необходимо адаптировать. Необходимо, чтобы по приему только одного или двух блоков данных пакета можно было в обратном порядке рассчитать первоначальное обнаружение положения. Для этого необходимо, чтобы каждый блок данных содержал информацию о том, о скольких блоках данных в пакете идет речь. Дополнительно, конечно, необходимо, чтобы в каждом блоке данных содержалась информация относительно времени задержки, описанном в предшествующем абзаце. Со знанием этого и знанием длительностей интервалов между блоками данных можно в обратном порядке последовательно рассчитать первоначальное обнаружение и тем самым положение вращения.
Хотя настоящее изобретение было описано на основе предпочтительных вариантов выполнения, оно этим не ограничено, а может модифицироваться разнообразными способами.
Для определения давления воздуха в шине могут быть применены известные способы, например, системы определения давления воздуха в шине прямого измерения. Системы прямого измерения, например, с помощью соответствующего датчика давления непосредственно определяют давление воздуха, действующее в шине. Системы косвенного измерения определяют, например, поперечное или продольное ускорение шины и из этого делают вывод относительно давления воздуха в шине. Кроме того, давление воздуха в шине можно определить также путем анализа таких свойств, как частота вращения или колебания колес транспортного средства.
Кроме того, настоящее изобретение не обязательно ограничено шинным информационным устройством, используемым в легковом автомобиле. Более того, изобретение позволяет с таким же успехом использовать изобретение в любых транспортных средствах, как, например: в грузовых автомобилях, мотоциклах, автобусах, автомобильных прицепах и т.п.
Варьироваться могут также вариант выполнения шинного информационного устройства, в частности, в отношении количества используемых блоков колесной электроники, приемо-передающих устройств, вариант выполнения устройства с программным управлением и блоков колесной электроники, вид связи между блоками колесной электроники и приемо-передающим устройством транспортного средства и т.д.
В этом месте следует указать на то, что изобретение относится также к определению положения шин как таковых, т.е. формулу изобретения следует читать также в смысле «устройств и способов определения положения по меньшей мере одной шины в транспортном средстве». Понятие «колесо» в этом случае в остальной части заявки мысленно следовало бы заменить на «шину».
Вместо использования четырех приемных устройств, относящихся к соответствующим колесам, или блокам колесной электроники, можно было бы использовать одно единственное центральное приемное устройство, рассчитанное в этом случае на прием и анализ передаваемых сигналов всех блоков колесной электроники.
Перечень позиций
10 транспортное средство
11 колеса транспортного средства
12 колесная электроника
13 приемо-передающие устройства
14 устройство управления шинным информационным устройством
15 устройство с программным управлением, микроконтроллер
16 запоминающее устройство
17 информационная система транспортного средства
20 обод колеса
21 шина колеса
22 (первый) датчик
23 устройство обработки данных
24 устройство управления
25 передающее устройство
26 считывающее устройство
27 фильтрующее устройство
28 фазосдвигающее устройство
29 (второй) датчик
30 положение вращения точки на колесе
31 дорожное полотно
40 блок данных
41 пакет данных
42 интервал
а верхнее положение
b вход на отпечаток протектора шины
с выход с отпечатка протектора шины
d низшее положение
е положение на 3 часа
f положение на 9 часов
g земное ускорение
t время
А ускорение
Е напряженность поля
Т1-Т2 длительность
V скорость
Х1 измерительный сигнал
Х2 информационный сигнал
Х3 управляющий сигнал
Х4 передаваемый сигнал
Х5 информационный сигнал
α угол вращения
Способ эксплуатации тахографа и тахограф
Способ и устройство для кодирования слов данных
Генератор импульсов для устройства, в частности для тахографа, и способ эксплуатации генератора импульсов
Цифровой блок тахографа, цифровая система тахографа и способ эксплуатации системы тахографа
Устройство передачи данных скорости
Тахограф, бортовой блок для сбора за пользование дорогой (maut-on-board-unit), индикаторный прибор и система
Способ эксплуатации сенсорного устройства и сенсорное устройство
Аккумулятор энергии
Способ определения состояния восстановителя в баке для восстановителя
Система и бортовое устройство для интеграции функций автомобильных устройств
Способ эксплуатации тахографа и тахограф
Способ и устройство для кодирования слов данных
Генератор импульсов для устройства, в частности для тахографа, и способ эксплуатации генератора импульсов
Цифровой блок тахографа, цифровая система тахографа и способ эксплуатации системы тахографа
Устройство передачи данных скорости
Тахограф, бортовой блок для сбора за пользование дорогой (maut-on-board-unit), индикаторный прибор и система
Способ эксплуатации сенсорного устройства и сенсорное устройство
Аккумулятор энергии
Способ определения состояния восстановителя в баке для восстановителя
Система и бортовое устройство для интеграции функций автомобильных устройств

