Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА
Вид РИД
Изобретение
Настоящее изобретение относится к области гидроакустики и может быть использовано для измерения глубины погружения объекта с использованием гидролокатора ближнего действия, установленного на движущемся подводном носителе.
Известно техническое решение по патенту РФ №2255991 от 20.03.2004 г., которое позволяет измерять координаты объектов с подводного носителя в водной среде. Этот патент содержит излучение зондирующего сигнала двумерной приемопередающей антенной, цифровую обработку принятых эхо-сигналов, измерение параметров обнаруженного объекта и его элементов движения. Однако это техническое решение не позволяет определить глубину погружения объекта.
Известен способ определения глубины погружения объекта по патенту РФ 2350983 от 27.03.2009 г. Способ содержит излучение зондирующего сигнала, прием эхо-сигнала и измерение дистанции D1 на момент времени t1, повторение процедуры измерения дистанции до объекта D2 в момент времени t1+Δt и определение скорости движения носителя Vcoб и глубины погружения объекта относительно горизонта движения носителя по измеренным величинам.
Недостатком этого способа является невозможность определения глубины погружения объекта в мелком море, когда глубина места мала и мала глубина погружения объекта.
Известен метод определения глубины погружения объекта с использованием гидролокатора, описанный в работе А.П.Простаков. Гидроакустика и корабль. Л.: Судостроение. 1967 г., стр.49, где описано устройство определении глубины объекта с надводного корабля с помощью гидролокатора. Наклоняя непосредственно акустическую антенну в вертикальной плоскости, определяют угол места объекта и наклонную дальность до нее. Информация выводится на перьевой рекордер, где отображается момент излучения зондирующего сигнала, движение пера связано со скоростью звука и отображается принятый эхо-сигнал. По измеренным величинам определяется глубина обнаруженного объекта.
Известен «Способ и устройство определения глубины подводного объекта» авторы SАТО KAZUO и др. по патенту JP 02708109 В2 от 04.02.98 г., G01S 15/10, HITACYI LTD, который основан на том же принципе, что и предыдущий способ, но определение направления производится с использованием автоматического сканирования характеристики направленности в вертикальной плоскости при излучении зондирующего сигнала узкой характеристикой направленности.
Наиболее близким аналогом предложенному способу является способ, изложенный в книге А.П.Сташкевича. Акустика океана. Л.: Судостроение, 1966 г., стр.263.
Способ содержит следующее операции:
излучение зондирующего сигнала гидролокатором в момент времени t1, прием эхо-сигнала от объекта, измерение временной задержки между моментами излучения зондирующего сигнала и приема эхо-сигнала, определение на момент времени t1 дистанции D1 до объекта по величине временной задержки и известной скорости распространения звука, измерение направления на объект в вертикальной плоскости, определение глубины погружения объекта по формуле Н=D Sin(α), где D - измеренная дистанция до объекта, α - угол между направлением движения носителя гидролокатора и направлением на объект в вертикальной плоскости.
Реализация этого способа требует серии посылок для определения такого положения характеристик направленности (ХН), которому соответствует максимальная амплитуда сигнала. Результатом оценки глубины для объекта является величина, которая получается при решении прямоугольного треугольника по гипотенузе, вычисляемой по оценке дистанции и углу, определяемому направлением характеристики направленности. Такая процедура определения глубины погружения зависит от правильности получения оценки направления на объект, которая зависит от ширины характеристики направленности в вертикальной плоскости. Чем уже ХН, тем точнее можно определить направление на объект, но для этого требуется больше времени и сложнее обнаружить объект.
Недостатком данного способа является невозможность измерения глубины погружения объекта в мелком море, что связано с трудностью определения угла места одной характеристикой направленности при наличии донных и поверхностных отражений и сложностью обнаружения объекта одной характеристикой направленности.
Техническим результатом от использования изобретения является измерение глубины погружения объекта при любых глубинах места с подводного гидролокатора, в том числе при малой глубине места.
Указанный недостаток устраняется тем, что в способ определения глубины погружения объекта гидролокатором, содержащий излучение зондирующего сигнала, прием эхо-сигнала от объекта, измерение временной задержки между моментами излучения зондирующего сигнала и приема эхо-сигнала, определение дистанции до объекта по величине временной задержки и известной скорости распространения звука, измерение направления на объект в вертикальной плоскости, определение глубины погружения объекта, введены дополнительные признаки, а именно: измеряют глубину погружения гидролокатора Нгл, принимают эхо-сигнал одновременно вертикальной линейной антенной, формирующей статический веер узких характеристик направленности (ХН) в вертикальной плоскости и широкие ХН в горизонтальной плоскости, и горизонтальной линейной антенной, формирующей статический веер узких ХН в горизонтальной плоскости и широкие ХН в вертикальной плоскости, имеющих общий фазовый центр, определяют помеху по первому циклу приема входной информации всеми характеристиками направленности, выбирают порог обнаружения, определяют эхо-сигналы, превысившие порог по каждой характеристике направленности, измеряют дистанцию до объекта Dгop по горизонтальным ХН, в которых произошло превышение порога, измеряют дистанцию Dверт по вертикальным ХН, в которых произошло превышение порога, определяют номер вертикальной пространственной ХН, для которой соблюдается неравенство Dверт<Dгop+Нгл, определяют угол места (α) по положения этой характеристики, определяют глубину погружения объекта относительно глубины погружения гидролокатора по формуле Ноб=Dверт Sin(α), a глубину погружения объекта определяют по формуле Н=Ноб+Нгл.
Поясним достижения указанного технического результата. Особенностью работы крестообразной антенны является то, что формирование рабочих узконаправленных характеристик производится в рабочем поле на основе сформированных характеристик простых линейных антенн. Каждая линейная антенна имеет одинаковое число характеристик, узконаправленных в горизонтальной плоскости и широконаправленных в вертикальной плоскости. Это объясняется особенностями линейной эквидистантной решетки (М.Д.Смарышев, Ю.Ю.Добровольский. Гидроакустические антенны. Л.: Судостроение. 1984 г., с.135). Если теперь одну из антенн разместить перпендикулярно другой так, чтобы их фазовые центры совпали, то их характеристики также перпендикулярно пересекутся и в зоне пересечения будут образованы узконаправленные области одновременного приема отраженных эхо-сигналов. Положение каждой пространственной характеристики фиксировано в пространстве и может быть измерено относительно осевого положения подводного носителя гидролокатора. С помощью этих антенн может быть измерено положение объекта по горизонтальным характеристикам направленности и положение объекта по вертикальным характеристикам направленности при автономной одновременной обработке поступившей информации.
Поскольку обработка производится по каждому каналу сформированной характеристики направленности автономно и независимо друг от друга, то результаты вторичной обработки используются самостоятельно для отображения на индикаторе в координатах: курсовой угол и дальность для горизонтальных каналов и угол места и дальность для вертикальных каналов. Принятие решения об обнаруженных объектах в горизонтальных пространственных каналах и в вертикальных пространственных каналах и измерения параметров эхо-сигнала по обнаруженным объектам и классификационных признаков производится автономно и независимо. Поэтому после обнаружения необходимо произвести идентификацию информации по обнаруженным объектам между пространственными горизонтальными и вертикальными характеристиками направленности. В качестве признака идентификации используется полученная оценка дистанции. Поскольку по вертикальным каналам может быть обнаружено отражение от объекта, находящегося на поверхности, оценка дистанции, до которой будет несколько больше, чем по горизонтальным каналам (А.П.Простаков. Гидроакустика и корабль. Л.: Судостроение. 1967 г., стр.49), то при сравнении необходимо учитывать разницу, которая не превышает глубины под носителем гидролокатора. Это определяется условием Dверт<Dгop+Нгл. Номер вертикального пространственного канала, который удовлетворяет условию, будет определять положение объекта по вертикали, и соответствующее значение угла места будет соответствовать этому вертикальному пространственному каналу в градусах. Общее число сформированных пространственных каналов определяется статическим веером характеристик направленности и величиной элементарной ширины одной характеристики направленности. Если известна дистанция до объекта и известен угол, определяющий вертикальное положение объекта или угол места, то можно определить глубину положения объекта относительно горизонта направления движения по известной формуле: Ноб=Dверт Sin(α), где Dверт - измеренная дистанция до объекта в вертикальном канале, α - угол, определяемый характеристикой в вертикальной плоскости, в котором обнаружен эхо-сигнал от объекта и для которого соблюдается неравенство. Для определения истиной глубины объекта необходимо добавить глубину погружения гидролокатора Н=Ноб+Нгл.
Сущность изобретения поясняется фиг.1, на которой приведена блок-схема устройства, реализующего способ.
На фиг.1 крестообразная антенна 1 двусторонней связью соединена с коммутатором 2. Первый выход коммутатора 2 соединен со входом системы 4 формирования характеристик направленности (СФХН) горизонтальных каналов через цифровой процессор 6 обработки горизонтальных каналов с первым входом цифрового процессора 8 управления и отображения, второй выход коммутатора 2 через цифровой процессор 7 обработки вертикальных каналов соединен со вторым входом цифрового процессора 8. Выход генератора 3 соединен со вторым входом коммутатора 2. Измеритель глубины 9 гидролокатора соединен с третьим входом цифрового процессора 8, а четвертый выход спецпроцессора 8 соединен с генератора 3.
С помощью предложенного устройства способ осуществляется следующим образом.
С выхода цифрового процессора 8, в котором совмещены функции пульта управления работой гидролокатора, блока принятия решения и отображения результатов работы, поступает команда на формирование зондирующего сигнала определенной длительности и мощности для обеспечения решения поставленной задачи в генератор 3. Современный подход к реализации систем обработки информации заключается в создании единого многофункционального вычислительного комплекса, обеспечивающего решения всех задач обработки информации, управления и отображения. Специальные цифровые процессоры выполняют базовые алгоритмы обработки, осуществляют конкретные функции управления и комплексирования с использованием аппаратных решений и жесткой логики вычислений (Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев. Корабельная гидроакустическая техника. СПб.: Наука. 2004 г., с. 278-295). Сформированный зондирующий сигнал через коммутатор 2 передается на крестообразную антенну 1 и излучается в водную среду. Отраженные эхо-сигналы принимаются крестообразной антенной 1, на основе которой формируются горизонтальные пространственные каналы и вертикальные пространственные каналы. Крестообразная антенна является известным устройством, которая используется в отечественной гидроакустике по своему прямому назначению, например по патенту РФ №117646 от 27.06.2012 г. на «Навигационную гидроакустическую станцию освещения ближней обстановки», в состав которой входит так же и генератор и коммутатор.
Методы формирования горизонтальных и вертикальных характеристик направленности и процедуры аппаратного решения реализованы в рамках этого же патента применительно к нескольким различным антеннам и, в частности, к крестообразной. С выхода блока 4 системы формирования характеристик направленности горизонтальных каналов временные реализации каждого пространственного горизонтального канала поступают в спецпроцессор 6 обработки горизонтальных каналов. На этапе первичной обработки в спецпроцессорах осуществляется временной спектральный анализ во всех приемных каналах, пространственный спектральный анализ для каждой антенны, временная согласованная фильтрация сигналов, пороговое обнаружение, обнаружение сигналов, измерение параметров и классификационных признаков. Более подробно вопросы формирования характеристик направленности и обработки принятых сигналов рассмотрены в патенте РФ №2225991 от 20.03.2004 г. «Навигационная гидроакустическая станция освещения ближней обстановки», где приводятся конкретные технические решения по реализации алгоритмов обработки.
Аналогично производится обработка вертикальных пространственных каналов. Практически при решении конкретных задач при существующем быстродействии вычислительной техники вся обработка производится одновременно в одном спецпроцессоре, но процесс решения задач может быть оптимизирован в соответствии с темпом поступления входной информации. Обработка горизонтальных пространственных каналов и вертикальных пространственных каналов производится одновременно и содержит одинаковую последовательность операций, которые включают в себя измерение помехи, выбор порога обнаружения, пороговый анализ эхо-сигналов, превысивших порог, измерение дистанции и скорости, а так же номер пространственного канала, в котором произошло обнаружение. Измеренные параметры эхо-сигналов поступают в процессор 8 управления и отображения, где производится идентификация эхо-сигналов, которые имеют одинаковую дистанцию. При этом дистанция, измеренная по вертикальным каналам, не должна быть больше дистанции, измеренной по горизонтальным каналом Dверт<Dгор.+Нгл.
Измерение глубины погружения осуществляется на каждом подводном аппарате с помощью эхолотов (А.В.Богородский, Д.Б.Островский. Гидроакустические навигационные и поисково-обследовательские средства. СПб.: ЛЭТИ. 2009 г., стр.89). На основании измеренных параметров выбирается характеристика направленности, в которой обнаружен объект и которая принадлежит вертикальному пространственному статическому вееру. Поскольку характеристики расположены дискретно и с шагом порядка 1,5-2 градуса, то этот шаг и определяет угол места обнаруженного объекта. Одновременно все обнаруженные эхо-сигналы отображаются на индикаторе обнаружения в координатах: дистанция и курсовой угол для горизонтальных каналов, дистанция и угол места для вертикальных пространственных каналов. Одновременное отображение вертикальных пространственных каналов и горизонтальных пространственных каналов позволяет снять оценку угла места и автоматически и с помощью оператора. Измеренный угол места и измеренная дистанция по этому вертикальному пространственному каналу позволяют вычислить глубину погружения объекта относительно гидролокатора Ноб=Dверт Sin(α). Для получения оценки полной глубины погружения объекта относительно поверхности необходимо добавить глубину погружения носителя гидролокатора Н=Ноб+Нгл. Оценка глубины погружения поступает из блока 9 измерителя глубины погружения в процессор 8 отображения и управления. Полученная оценка глубины погружения отображается в табло параметров объекта и может быть использована в задачах классификации.
Таким образом, предлагаемая последовательность операций позволяет гидролокатором, установленным на подводном носителе, измерять глубину погружения объекта при любой глубине места, что обусловлено использованием крестообразной антенны, которая обнаруживает объект одновременно в горизонтальной и вертикальной плоскостях с высокой точностью.
Способ определения глубины погружения объекта гидролокатором, содержащий излучение зондирующего сигнала, прием эхо-сигнала от объекта, измерение временной задержки между моментами излучения зондирующего сигнала и приема эхо-сигнала, определение дистанции до объекта по величине временной задержки и известной скорости распространения звука, измерение направления на объект в вертикальной плоскости, определение глубины погружения объекта, отличающийся тем, что измеряют глубину погружения гидролокатора Н, принимают эхо-сигнал одновременно вертикальной линейной антенной, формирующей статический веер узких характеристик направленности (ХН) в вертикальной плоскости и широкие ХН в горизонтальной плоскости, и горизонтальной линейной антенной, формирующей статический веер узких ХН в горизонтальной плоскости и широкие ХН в вертикальной плоскости, имеющих общий фазовый центр, определяют помеху по первому циклу приема входной информации всеми характеристиками направленности, выбирают порог, определяют эхо-сигналы, превысившие порог по каждой характеристике направленности, измеряют дистанцию до объекта D по горизонтальным ХН, в которых произошло превышение порога, измеряют дистанцию D по вертикальным ХН, в которых произошло превышение порога, определяют номер вертикальной пространственной ХН, для которой соблюдается неравенство D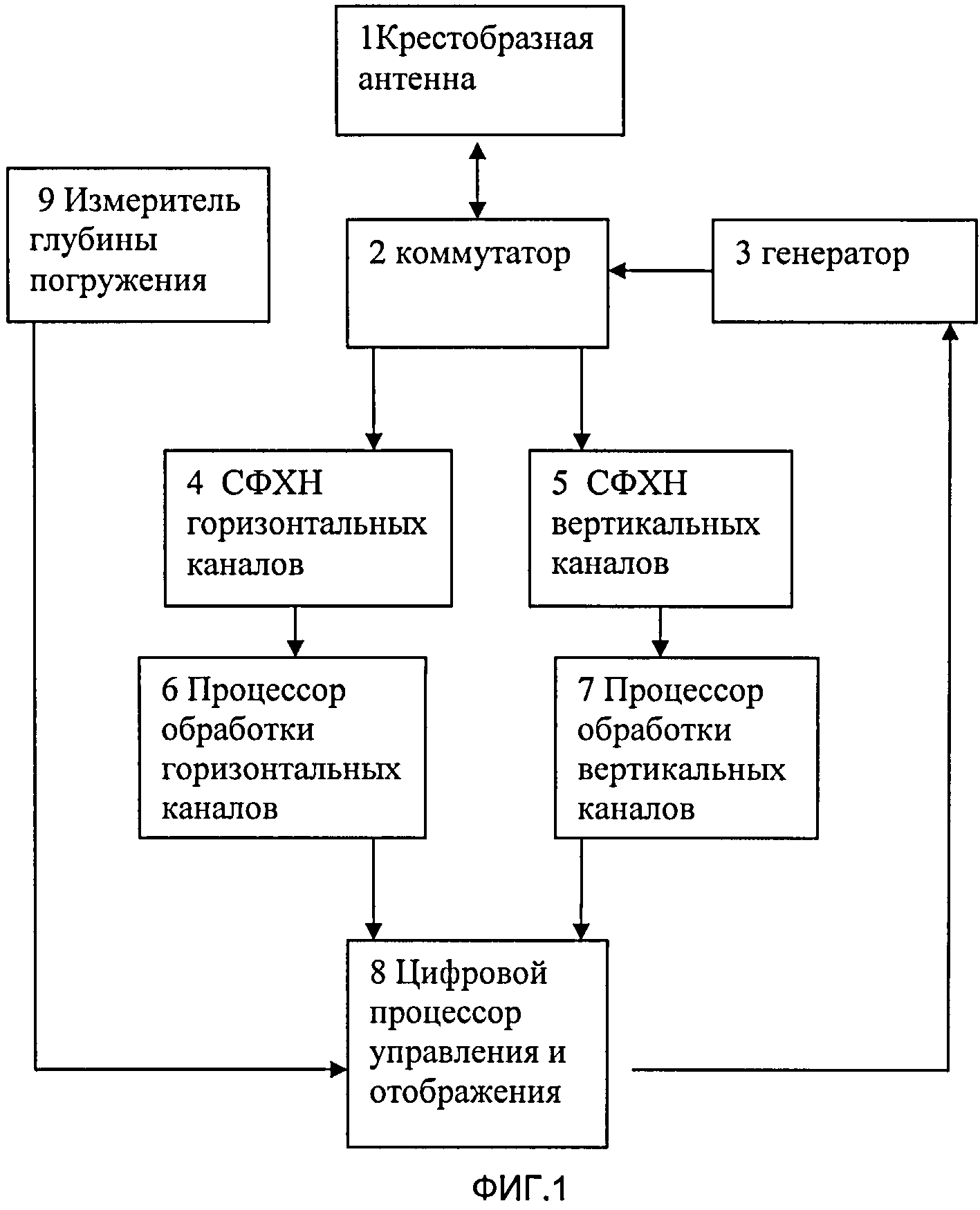
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Гидроакустический способ измерения дистанции с использованием взрывного сигнала
Способ определения осадки айсберга
Способ измерения дистанции до шумящего объекта
Устройство постановки и выборки гибкой протяженной буксируемой антенны
Способ автоматической классификации
Многоэлементная гидроакустическая антенна
Способ освещения подводной обстановки
Способ обработки гидроакустического сигнала шумоизлучения объекта
Способ измерения толщины льда
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Гидроакустический способ измерения дистанции с использованием взрывного сигнала
Способ определения осадки айсберга
Способ измерения дистанции до шумящего объекта
Устройство постановки и выборки гибкой протяженной буксируемой антенны
Способ автоматической классификации
Многоэлементная гидроакустическая антенна
Способ освещения подводной обстановки
Способ обработки гидроакустического сигнала шумоизлучения объекта
Способ измерения толщины льда

