Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И МНОГОПОЗИЦИОННЫЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области измерений радиолокационных характеристик объектов и может быть использовано для измерений как моностатической, так и бистатической эффективной площади рассеяния (ЭПР) исследуемых объектов сложной формы применительно к многопозиционным радиолокационным системам.
Известны способы измерения бистатической ЭПР исследуемых объектов узкополосными импульсными и непрерывными зондирующими сигналами и радиолокационные измерительные комплексы (РИК) для их реализации в некотором фиксированном поляризационном базисе [Марлоу, Ватсон, Ван-Хозер. Комплекс RATSCAT для измерения радиолокационного поперечного сечения целей. ТИИЭР, 1965, т.53, 8, стр.1231…1232; Е.И. Майзельс, В.В. Торгованов. Измерение характеристик рассеяния радиолокационных целей. М., Сов. Радио, 1972, стр.166…175; Шетне К., Маунт В. Двухпозиционный метод измерения радиолокационного поперечного сечения моделей натуральной величины / ТИИЭР, 1965, №8 стр.1231].
Сущность способа с использованием узкополосных и непрерывных зондирующих сигналов [Марлоу, Ватсон, Ван-Хозер. Комплекс RATSCAT для измерения радиолокационного поперечного сечения целей. ТИИЭР, 1965, т.53, 8, стр.1231…1232; Е.И. Майзельс, В.В. Торгованов. Измерение характеристик рассеяния радиолокационных целей. М., Сов. Радио, 1972, стр.166…175] заключается в облучении исследуемого объекта радиолокационным сигналом фиксированной мощности и фиксированной поляризации со стационарного пункта, последующем приеме рассеянного исследуемым объектом сигнала с помощью приемного устройства разнесенного пункта, размещенного на соответствующем угле разноса в горизонтальной и вертикальной плоскости, его обработки и регистрации, с последующим сравнением мощностей сигналов, рассеянных исследуемым объектом и калибровочным отражателем с известной бистатической ЭПР, размещаемым в месте расположения исследуемого объекта, взамен его, на соответствующих углах разноса в горизонтальной и вертикальной плоскостях. Дальность от стационарной и подвижной позиций РИК до исследуемого объекта определятся линейными размерами приемопередающих антенн и исследуемого объекта на рабочей длине волны.
Реализующий способ РИК включает стационарный пункт, оборудованный генератором импульсного или непрерывного сигнала, выход которого через антенный переключатель (коммутатор «прием-передача») соединен со входом приемо-передающей антенны, связанной по радиоканалу «облучающий сигнал - отраженный сигнал» с исследуемым объектом, выход приемопередающей антенны через тот же коммутатор соединен с приемным устройством, выход которого соединен с регистрирующим устройством и подвижную разнесенную подвижную позицию, оборудованную приемной антенной, выход которой соединен с приемным устройством, выход которого соединен с регистрирующим устройством. Синхронизация приемопередающего устройства стационарного пункта и приемного устройства подвижного пункта осуществляется с помощью кабельной линии связи или по радиоканалу на частоте, отличной от несущей частоты РИК. База разноса в типовых условиях открытого полигона составляет не более 2 км.
Основным недостатком указанного способа и реализующего его РИК в части обеспечения измерений бистатической ЭПР для углов разноса больше 90° являются ограниченные возможности пространственно-временной селекции переотраженного от исследуемого объекта полезного сигнала на фоне зондирующего сигнала от передающего устройства передающего стационарного пункта на разнесенном приемном устройстве подвижной части РИК вследствие малой разности хода между ними. По этой причине измерения ограничиваются углами разноса в горизонтальной плоскости до 120°…140°. Для достижения углов разноса 170°…180° необходимо обеспечить селекцию рассеянного полезного сигнала на фоне зондирующего. Решение поставленной задачи принципиально возможно следующими известными способами:
обеспечением временной селекции переотраженного и прямого сигналов путем увеличения разности хода между ними;
обеспечением фазовой селекции когерентных сигналов путем векторного вычитания, измеренных в точке приема, рассеянной исследуемым объектом и падающей ЭМВ при наличии и отсутствии исследуемого объекта, соответственно;
обеспечением пространственной угловой селекции этих сигналов путем снижения уровня полей излучения и приема по боковым лепесткам передающей и приемной антенн разнесенного приемного устройства подвижной части РИК, соответственно.
Действительно, разность хода прямого зондирующего и переотраженного объектом сигналов (ΔR) на разнесенном приемном устройстве подвижной части РИК определяется по формуле
 , где
, где
 - расстояние между передатчиком и приемником РИК;
- расстояние между передатчиком и приемником РИК;
R4=R1sin(180°-γ) - кратчайшее расстояние между передатчиком и осью «приемник - исследуемый объект»;
R1 - расстояние между передатчиком и исследуемым объектом;
R2 - расстояние между исследуемым объектом и приемником;
 - угол прихода прямого сигнала к оси «приемник - исследуемый объект»;
- угол прихода прямого сигнала к оси «приемник - исследуемый объект»;
γ - угол разноса РИК.
Расчеты показывают, что для обеспечения надежной временной селекции переотраженного и прямого сигналов при γ=170…175° в соответствии с известным условием
ΔR≥сτu, где
с - скорость распространения электромагнитных волн в свободном пространстве,
в результате R2 - расстояние между передающей антенной и исследуемым объектом, например, при τu=0,3 мкс, должно быть R2≥10000 м.
Решение задачи рассмотренным методом с помощью наземных РЛС вызывает серьезные трудности, обусловленные ограниченными возможностями пространственного разноса и сложностью обеспечения надежной синхронизации приемной и передающей аппаратуры.
Реализация способа фазовой селекции переотраженного от исследуемого объекта сигнала путем векторного вычитания падающего поля из суммарного возможна только на базе разнесенной радиолокационной системы с внутренней (системной) когерентностью, создание которой для широкого диапазона длин волн является чрезвычайно сложной технической задачей.
Одним из возможных путей обеспечения пространственной селекции прямого и переотраженного исследуемым объектом сигналов является использование антенных (приемной и передающей) систем с низким уровнем боковых лепестков. Можно показать, что для обеспечения измерений бистатической ЭПР исследуемого объекта 10-2 м2 с погрешностью не более 1 дБ (30%) при уровне фона 10-4 м2, уровень боковых лепестков диаграмм направленности приемной и передающей антенн должен быть менее - 40 дБ. Достижение таких уровней обеспечивается применением специальных антенных систем с пониженным излучением вне раскрыва. Разработка высокоселективных зеркальных антенн для широкого диапазона исследуемых длин волн связана с большими материальными затратами и достижением уровня боковых лепестков - минимум - 30 дБ.
Наиболее близким техническим решением к изобретению по технической сущности является способ измерения бистатической ЭПР исследуемых объектов с помощью плоского пассивного ретранслятора [Шетне К., Маунт В. Двухпозиционный метод измерения радиолокационного поперечного сечения моделей натуральной величины / ТИИЭР, 1965, №8, стр.1231].
Сущность способа заключается в облучении исследуемого объекта импульсным зондирующим сигналом фиксированной длины волны λi, фиксированной мощности и фиксированной поляризации линейного базиса, излученным приемопередающей антенной измерительной РЛС фиксированной длины волны передающего пункта в направлении исследуемого объекта, переизлучении рассеянного исследуемым объектом сигнала с направления, соответствующего заданному углу разноса РИК, с помощью системы из M плоских пассивных ретрансляторов, установленных по дуге окружности с центром в точке размещения исследуемого объекта, в направлении приемной антенны разнесенного приемного устройства, приеме этого сигнала отдельно от каждого пассивного ретранслятора, его регистрации и обработке, с последующим сравнением мощностей сигналов, рассеянных исследуемым объектом и калибровочным отражателем с известной бистатической ЭПР, размещаемого в месте расположения исследуемого объекта, взамен его, для соответствующих углов разноса. При изменении угла разноса РИК осуществляется перенастройка приемной антенны разнесенного приемного устройства на пассивный ретранслятор, установленный в направлении, соответствующему требуемому углу разноса. Дальность от измерительной РЛС передающего пункта, позиции пассивного ретранслятора и приемной антенны разнесенного приемного устройства РИК до исследуемого объекта определяется линейными размерами передающей и приемной антенн, размерами пассивного ретранслятора и исследуемого объекта на рабочей длине волны в соответствии с требованиями обеспечения условий дальней зоны.
Реализующий способ РИК (из-за отсутствия объективной информации о его составе) должен включать генератор синхроимпульсов, измерительную РЛС фиксированной длины волны, состоящую из импульсного передатчика фиксированной длины волны, выход которого через антенный переключатель соединен с передающей антенной, связанной по радиолокационному каналу «передающая антенна - исследуемый объект или калибровочный отражатель - пассивный ретранслятор - приемная антенна разнесенного приемного устройства» с исследуемым объектом или калибровочным отражателем и пассивным ретранслятором, который связан по радиоканалу «передающая антенна - рассеянный объектом сигнал - пассивный ретранслятор - приемная антенна разнесенного приемного устройства» с передающей антенной, исследуемым объектом и приемной антенной разнесенного приемного устройства, выход которой, через волноводный переключатель, соединен с приемным устройством совпадающей поляризации, выход которого соединен с регистрирующим устройством, второй выход генератора синхроимпульсов соединен с тем же приемным устройством разнесенного приемного устройства совпадающей поляризации для обеспечения стробирования полезного, переотраженного от пассивным ретранслятором исследуемого объекта или калибровочного отражателя сигнала, по дальности, а выход датчика углового положения исследуемого объекта, установленного на устройстве вращения, соединен со входом того же регистрирующего устройства.
Анализ (ввиду отсутствия детальной информации) наиболее близкого способа и реализующего его устройства показывает, что основным техническим решением является угловая селекция прямого зондирующего и полезного (переотраженного с помощью плоского пассивного ретранслятора) сигналов. В случае использования такого пассивного ретранслятора эта задача сводится к выбору геометрических размеров плоской пластины, обеспечивающие их совпадение направления прихода прямого зондирующего сигнала с положением минимумов бистатической индикатриссы рассеяния пластины пассивного ретранслятора при ориентации ее главного максимума в направлении прихода переотраженного от исследуемого объекта сигнала. При этом угол ΔΘОБ между направлениями прихода прямого зондирующего и переотраженного от исследуемого объекта сигналов должен совпадать с положением минимума индикатриссы бистатического рассеяния  , (град.), m=1, 2, 3, … - номер минимума индикатриссы. Использование принципа ретрансляции зеркальным переотражением позволяет удвоить эффект пространственной угловой селекции за счет сохранения разности ΔΘОБ при переотражении от пассивного ретранслятора как полезного, так и помехового (прямого зондирующего) сигналов.
, (град.), m=1, 2, 3, … - номер минимума индикатриссы. Использование принципа ретрансляции зеркальным переотражением позволяет удвоить эффект пространственной угловой селекции за счет сохранения разности ΔΘОБ при переотражении от пассивного ретранслятора как полезного, так и помехового (прямого зондирующего) сигналов.
Бистатические измерения ЭПР исследуемых объектов с использованием пассивного ретранслятора должны проводиться относительным методом сравнения с известной мерой ЭПР - эффективным бистатическим калибровочным отражателем (цилиндром, сферой, биконусом и др.). При этом, по аналогии с методом измерений моностатической ЭПР, сравниваются мощности сигналов исследуемого объекта и калибровочного отражателя в соответствии с выражением
 , где
, где
Рпрд - мощность излучения измерительной РЛС;
Gпрд(прм) - коэффициенты усиления передающей и приемной антенн соответственно;
 ,
,  - величина бистатической (на угле γ) ЭПР исследуемого объекта, калибровочного отражателя и ретранслятора, соответственно;
- величина бистатической (на угле γ) ЭПР исследуемого объекта, калибровочного отражателя и ретранслятора, соответственно;
λ - длина волны зондирующего сигнала;
R1, R2, R3 - дальности между передающей антенной и исследуемым объектом, между исследуемым объектом и пассивным ретранслятором, между пассивным ретранслятором и приемной антенной, соответственно.
Здесь первый сомножитель, второй и четвертый соответствуют известным выражениям классической формы уравнения бистатической радиолокации, а третий определяет, в пределах единичного телесного угла, мощность сигнала, отраженного от исследуемого объекта, переотраженную в направлении на приемную антенну и приходящуюся на единицу плотности потока мощности, рассеянной исследуемым объектом в направлении пассивного ретранслятора. Реализация относительного метода, как и в случае моностатических измерений, позволяет определить бистатическую ЭПР исследуемого объекта из соотношения
 ,
,
при условии R1 об.=R1KO, R2 об.=R2KO, R3 об.=R3KO, Gпрд=Gпрм, где
γ, α - углы разноса бистатической РЛС в горизонтальной и вертикальной плоскостях, соответственно.
Известно, что для обеспечения достаточной точности измерения ЭПР неравномерность распределения амплитуды и фазы фронта падающего электромагнитного поля на каждой длине волны в пределах рабочего объема РИК должно составлять не более 1 дБ по напряженности и π/8 по фазе. Для этого расстояние R1 между передающей антенной и исследуемыми объектом, а также R2 и R3 в радиолокационных каналах «исследуемый объект - пассивный ретранслятор» и «пассивный ретранслятор - приемная антенна разнесенного приемного устройства» должны удовлетворять требованию «условия дальней зоны»
 ,
,
 ,
,
 , где
, где
lАпрд (прм) - размер апертуры передающей (приемной) антенны;
lоб.max - максимальный линейный размер исследуемого объекта;
a Р - максимальный линейный размер пластины плоского пассивного ретранслятора.
Из проведенного анализа наиболее близкого способа следует, что линейный размер пластины плоского пассивного ретранслятора a p должен выбираться на основе решения игровой задачи:
с одной стороны, для обеспечения условия дальней зоны по отношению к линейному размеру исследуемого объекта с учетом геометрии бистатической РЛС  ;
;
с другой, исходя из обеспечения требуемой для измерения исследуемых объектов с минимальной ЭПР - величиной энергетического потенциала измерительной РЛС.
Последняя определяется на основе достижения равной с моностатическим случаем наблюдения исследуемого объекта чувствительностью приемных устройств измерительных РЛС
 ,
,
которая при условии GПРД=GПРМ и  с учетом размера геометрической площади пластины пассивного ретранслятора прямоугольной формы
с учетом размера геометрической площади пластины пассивного ретранслятора прямоугольной формы  , приводит к решению
, приводит к решению  . Для повышения селективных свойств пассивного ретранслятора целесообразно использовать плоские пластины других форм. Так при использовании ромбической пластины с прямым углом при вершине (
. Для повышения селективных свойств пассивного ретранслятора целесообразно использовать плоские пластины других форм. Так при использовании ромбической пластины с прямым углом при вершине ( , a
р=bр)
, a
р=bр)
 , где
, где
SГр - площадь проекции пассивного ретранслятора, видимая со стороны приемной антенны разнесенного приемного устройства, необходимая для обеспечения условия  ;
;
ϕ - угол бистатического переотражения пассивным ретранслятором рассеянного исследуемым объектом сигнала для фиксированного угла разноса бистатической РЛС γ.
Все приведенные условия должны определяться для минимальной λmin и максимальной λmax длин волн РИК, соответственно.
Таким образом, основными недостатками известного способа и реализующего его устройства являются следующие:
недостаточная угловая селекция переотраженного и прямого зондирующего сигналов на разнесенном приемном устройстве РИК из-за применения плоских пассивных ретрансляторов прямоугольной формы;
ограничение измерений только одной длиной волны при фиксированной поляризации излучения и приема, в то время как из-за высокого уровня деполяризации рассеянного исследуемым объектом сигнала, необходимо, при его переотражении в направлении измерительной РЛС и разнесенного приемного устройства, учитывать все поляризационные компоненты;
ограничение измерений только одним углом разноса, а также необходимость перенастройки приемной антенны разнесенного приемного устройства для изменения угла разноса РИК на другой пассивный ретранслятор. При этом необходим учет характеристик распространения электромагнитной волны в направлении каждого пассивного ретранслятора с учетом влияния подстилающей поверхности измерительной трассы, что непосредственно сказывается на результирующей погрешности измерений.
Технической задачей настоящего изобретения является расширение функциональных возможностей способа измерения ЭПР исследуемых объектов и многопозиционного РИК за счет обеспечения одновременного измерения как моностатической, так и бистатической ЭПР исследуемых объектов на нескольких углах разноса на совпадающей и ортогональной поляризациях линейного базиса на нескольких длинах волн при одновременном снижении погрешности измерений.
Поставленная задача достигается тем, что в известном способе измерения ЭПР исследуемых объектов, заключающемся в облучении исследуемого объекта импульсным сигналом фиксированной длины волны, фиксированной мощности и фиксированной поляризации линейного базиса, излученным антенной измерительной РЛС в направлении исследуемого объекта, переизлучении рассеянного исследуемым объектом сигнала с направления, соответствующего заданному углу разноса РИК в горизонтальной плоскости с помощью системы из M пассивных ретрансляторов в направлении приемной антенны разнесенного приемного устройства, приеме этого сигнала отдельно от каждого пассивного ретранслятора, регистрации с последующим сравнением мощностей сигналов, рассеянных исследуемым объектом и калибровочным отражателем с известной бистатической ЭПР, размещаемого в месте расположения исследуемого объекта, взамен его, дополнительно исследуемый объект облучают импульсными сигналами фиксированной мощности и фиксированной поляризации N-1 измерительных РЛС фиксированной длины волны, рассеянный исследуемым объектом сигнал для соответствующих углов разноса переотражают с помощью системы пассивных ретрансляторов с низким (менее - 30 дБ) уровнем боковых лепестков бистатической индикатрисы рассеяния, установленных на специальной измерительной трассе, обеспечивающей квазиплоское распределение электромагнитного поля, на одной линии, совпадающей с фиксированным направлением оптических осей системы приемных антенн разнесенных приемных устройств, перекрывающих диапазон длин волн λN, причем, с соответствующего месту установки каждого пассивного ретранслятора угла разноса γm, временная селекция сигналов от каждого пассивного ретранслятора на разнесенных приемных устройствах осуществляется за счет разности хода лучей на трассах R2m и R3m, принимают, измеряют мощность каждой совпадающей и ортогонально-поляризованной компоненты, сравнивают ее с мощностью сигналов соответствующей поляризации, отраженных от калибровочного отражателя с известной бистатической ЭПР на соответствующей поляризации и регистрируют мощности совпадающей и ортогонально поляризованной компонент рассеянного исследуемым объектом и калибровочным отражателем сигналов, а исследуемый объект или калибровочный отражатель поочередно вращают в горизонтальной плоскости при фиксированных значениях угла ориентации в вертикальной плоскости и при обработке результатов измерений учитывают текущую ориентацию исследуемого объекта или калибровочного отражателя для всех исследуемых значений углов разноса и длин волн, а также взаимного расположения каждой измерительной РЛС относительно исследуемого объекта и каждого пассивного ретранслятора.
В радиолокационный измерительный комплекс для измерения ЭПР исследуемых объектов, содержащий генератор синхроимпульсов с измерительной РЛС фиксированной длины волны, состоящую из импульсного передатчика фиксированной длины волны и приемо-передающей антенны, исследуемый объект, калибровочный отражатель, поворотную платформу с датчиком текущего углового положения исследуемого объекта или калибровочного отражателя, M пассивных ретрансляторов в виде плоских пластин, установленных на поверхности земли, разнесенное приемное устройство с приемной антенной и регистрирующее устройство, при этом один выход генератора синхроимпульсов соединен с импульсным передатчиком фиксированной длины волны, выход которого соединен с приемопередающей антенной, связанной по радиолокационному каналу «приемопередающая антенна - исследуемый объект или калибровочный отражатель - пассивный ретранслятор» с исследуемым объектом или калибровочным отражателем и пассивным ретранслятором, который связан по радиоканалу «приемопередающая антенна - рассеянный объектом сигнал - пассивный ретранслятор - приемная антенна» с приемопередающей антенной, исследуемым объектом или калибровочным отражателем и разнесенным приемным устройством, выход которого соединен с регистрирующим устройством, при этом второй выход генератора синхроимпульсов соединен с разнесенным приемным устройством для обеспечения стробирования полезного, переотраженного пассивным ретранслятором рассеянного исследуемым объектом или калибровочным отражателем сигнала, по дальности, а выход датчика углового положения исследуемого объекта или калибровочного отражателя, установленного на поворотной платформе, соединен со входом того же регистрирующего устройства, дополнительно введены N-1 измерительных РЛС фиксированной длины волны, в каждую из которых введены волноводный переключатель, два антенных переключателя и приемопередающий поляризационный расщепитель, через который приемопередающая антенна соединена с соответствующим антенным переключателем, вторые выходы которых подключены к соответствующим входам двухканального приемного устройства совпадающей и ортогональной поляризации измерительной РЛС, два выхода которого соединены с соответствующими входами регистрирующего устройства, а каждое разнесенное приемное устройство состоит из двухканального приемного устройства совпадающей и ортогональной поляризации разнесенного приемного устройства, двух антенных переключателей и приемного поляризационного расщепителя, причем приемная антенна через приемный поляризационный расщепитель и соответствующий антенный переключатель соединена с соответствующим входом двухканального приемного устройства совпадающей и ортогональной поляризации разнесенного приемного устройства, выходы которого являются выходами разнесенного приемного устройства, а каждый пассивный ретранслятор состоит из малоотражающей мачты, на которой закреплена плоская ромбическая пластина с возможностью ее наведения по угловым координатам и перемещения в вертикальной плоскости, причем пассивные ретрансляторы установлены на одной линии, совпадающей с оптической осью фиксированного направления приемных антенн разнесенных приемных устройств, при этом каждая измерительная РЛС фиксированной длины волны установлена на дальности от исследуемого объекта
 , где
, где
lАпрд (прм) - размер апертуры приемо-передающей антенны;
lоб.max - максимальный линейный размер исследуемого объекта;
λN - рабочая длина волны ИРЛС фиксированной длины волны и синхронизированных от единого генератора синхроимпульсов РИК, причем второй выход генератора синхроимпульсов соединен с третьим входом двухканального приемного устройства совпадающей и ортогональной поляризации разнесенного приемного устройства для обеспечения стробирования полезного, рассеянного исследуемым объектом или калибровочным отражателем сигнала на соответствующем угле разноса, по дальности, при этом пассивные ретрансляторы за счет использования плоской ромбической пластины обладают низким уровнем боковых лепестков бистатической индикатрисы рассеяния и размеры которых обеспечивают требуемое амплитудно-фазовое распределение электромагнитного поля на исследуемом объекте и на трассах R2 «исследуемый объект - пассивный ретранслятор» и R3 «пассивный ретранслятор - приемная антенна разнесенного приемного устройства» в соответствии с требованием дальней зоны
 ,
,
 , где
, где
lоб.max - максимальный линейный размер исследуемого объекта;
a Р - максимальный линейный размер пластины плоского пассивного ретранслятора;
lАпрм - размер апертуры приемной антенны разнесенного приемного устройства на длине волны λN, причем угол ориентации оси линии пассивных ретрансляторов θр определяется минимальным расстоянием R2 min, которое выбирается из условия «дальней зоны»
θр=arcsin(R2 min/R1), где
R2 min - минимальное расстояние между исследуемым объектом и линией пассивных ретрансляторов.
Угол ориентации пассивного ретранслятора относительно оси линии построения пассивных ретрансляторов αРm обеспечивает зеркальное переотражение рассеянного исследуемым объектом или калибровочным отражателем сигнала в направлении приемной антенны разнесенного приемного устройства αРm=(γm+θр)/2, минимальный угол разноса РИК определяется из условия обеспечения дальней зоны в системе «приемная антенна разнесенного приемного устройства - первый пассивный ретранслятор» линии
 , где
, где
R31 - расстояние между приемной антенной разнесенного приемного устройства и первым пассивным ретранслятором линии, при условии R31≥(a Рm+lmax)2/λN, а расстояние между соседними пассивными ретрансляторами линии ΔR3=R3m-R3(m-1) должно быть не меньше наихудшей разрешающей способности по дальности многопозиционного РИК ΔRmax≥сτu max/2, при этом пассивные ретрансляторы в линии смещены один относительно другого на величину проекции предыдущего пассивного ретранслятора на плоскость, ортогональную оси линии ΔCm=a Рmsin[(γm+θР)/2], а суммарное смещение пассивных ретрансляторов в линии не превышает ширину диаграммы направленности системы приемных антенн разнесенных приемных устройств с наивысшей разрешающей способностью δΘпрм 0,5 по уровню половинной мощности
 .
.
Сущность предлагаемого изобретения заключается в том, что переотражение зондирующего сигнала каждой ИРЛС нескольких диапазонов длин волн от исследуемого объекта в направлении пассивных ретрансляторов, установленных в линию, совпадающую с оптической осью приемных антенн разнесенных приемных устройств, позволяет одновременно принимать сигналы, рассеянные исследуемым объектом с нескольких, по количеству пассивных ретрансляторов M линии, углов разноса и осуществлять их стробирование по дальности на разнесенных приемных устройствах. Одновременно плоская ромбическая пластина пассивного ретранслятора практически не деполяризует переотраженный сигнал линейного базиса, что обеспечивает возможность его использования при измерении элементов поляризационной матрицы рассеяния исследуемого объекта или калибровочного отражателя. Применение пассивных ретрансляторов с низким, менее - 30 дБ, уровнем боковых лепестков бистатической индикатрисы рассеяния позволяет практически исключить составляющую погрешности измерения, обусловленную переотражениями от местных предметов, находящихся в зоне боковых лепестков индикатриссы рассеяния пассивных ретрансляторов в пределах строба дальности РИК, и обеспечить сохранение высокой точности измерений (погрешность определения величины ЭПР не превышает 30%).
Предлагаемый способ и комплекс для его осуществления обладают широкими возможностями в части обеспечения плоскостности падающего электромагнитного поля на трассе «пассивный ретранслятор - приемные антенны разнесенных приемных устройств» за счет использования специально-профилированной трассы, единой для всех пассивных ретрансляторов линии. Крепление плоской ромбической пластины пассивного ретранслятора на малоотражающей мачте с возможностью его наведения по угловым координатам и перемещения в вертикальной плоскости обеспечивает необходимую точность наведения в горизонтальной плоскости на исследуемый объект, а также требуемый угол визирования в вертикальной плоскости. Использование малоотражающей мачты, например металлической фермы, покрытой радиопоглощающим материалом, исключает переотражение зондирующего и отраженного от исследуемого объекта сигнала элементами мачты и, следовательно, не увеличивает погрешность измерений элементов поляризационной матрицы рассеяния.
Таким образом, по сравнению с известным способом измерения ЭПР объектов и радиолокационным комплексом для его осуществления - прототипом достигаются свойства, заключающиеся в расширении функциональных возможностей многопозиционного РИК за счет обеспечения одновременного измерения как моностатической, так и бистатической ЭПР исследуемых объектов на нескольких фиксированных углах разноса на совпадающей и ортогональной поляризациях на нескольких длинах волн при одновременном снижении погрешности измерений.
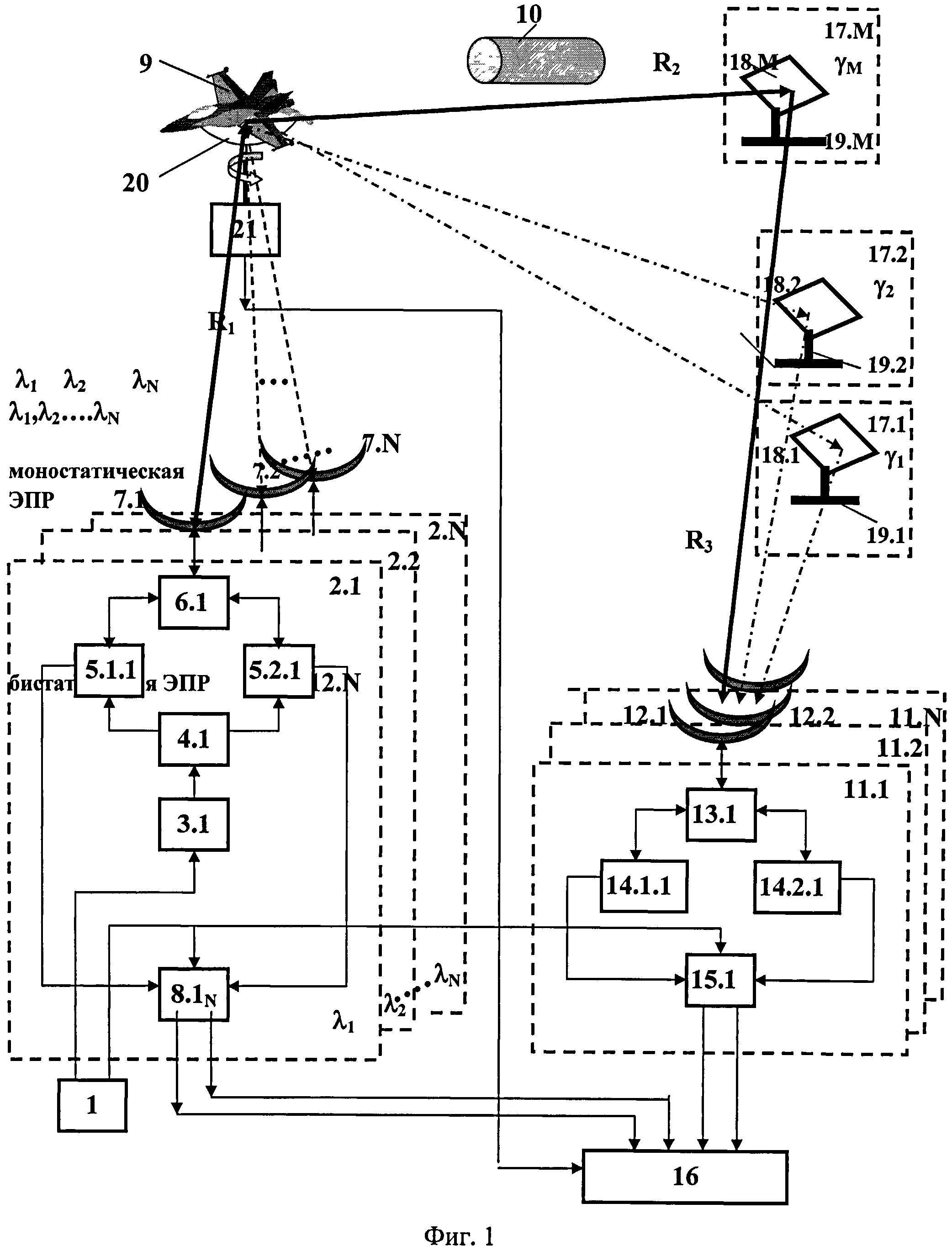
На фиг.1 представлена структурная схема предлагаемого многопозиционного радиолокационного измерительного комплекса.
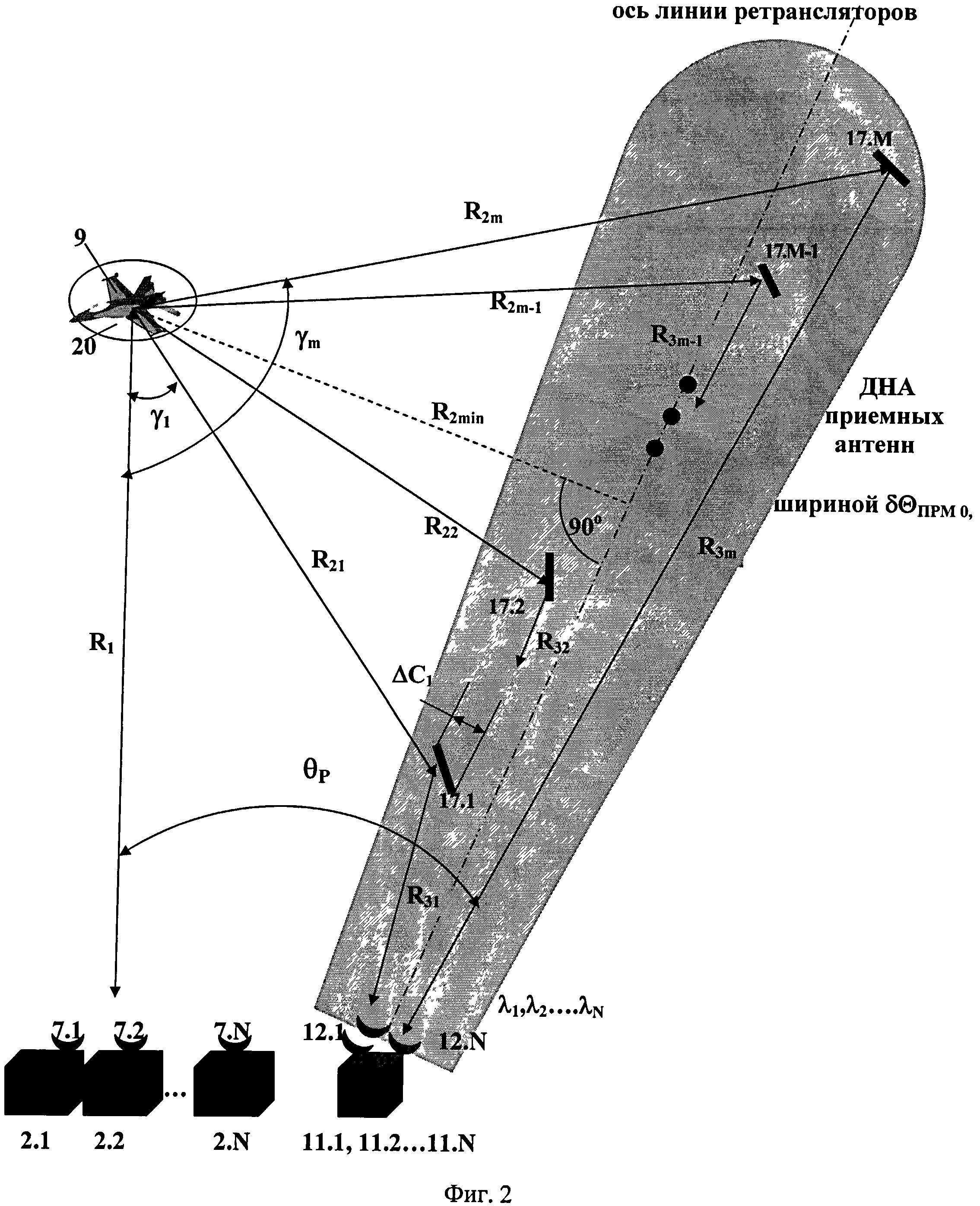
На фиг.2 приведена схема в горизонтальной плоскости проведения измерений по предлагаемому способу.
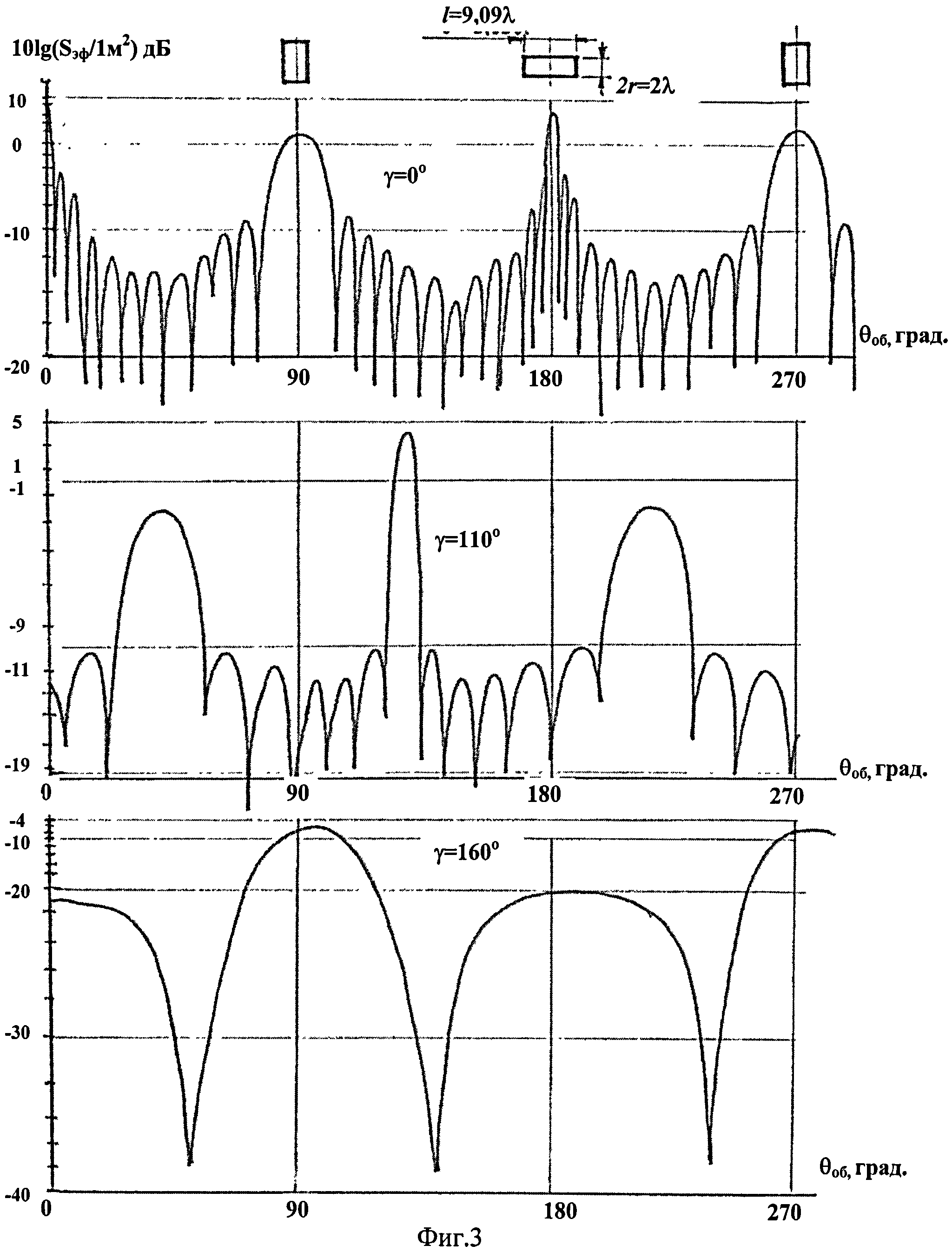
На фиг.3 приведены результирующие диаграммы моно- и бистатического рассеяния цилиндрического отражателя для углов разноса 0°, 110° и 160°, полученные по предлагаемому способу с помощью предлагаемого многопозиционного радиолокационного измерительного комплекса для его осуществления.
Измерения по предлагаемому способу проводят в три этапа.
На первом этапе проводят планирование измерений, заключающееся в определении требуемых ракурсов визирования и углов разноса исследуемого объекта в горизонтальной и вертикальной плоскостях и соответствующей подготовке аппаратуры измерений.
На втором этапе проводят измерения с выдерживанием параметров, определенных на первом этапе. При этом осуществляется наведение приемопередающих антенн на исследуемый объект и зеркальное наведение пассивных ретрансляторов на антенны разнесенных приемных устройств и исследуемый объект или калибровочный отражатель, соответственно. Исследуемый объект и калибровочный отражатель поочередно устанавливают на поворотном устройстве. При этом производят регистрацию, например, на шлейфовый осциллограф, уровней мощности ортогонально поляризованных компонент сигналов, рассеянных исследуемым объектом или калибровочным отражателем и переотраженного пассивными ретрансляторами в направлении приемных антенн разнесенных приемных устройств, на их выходе в зависимости от вращения исследуемого объекта. Значения углового положения исследуемого объекта или калибровочного отражателя относительно передающих антенн и пассивного ретранслятора определяют с помощью соответствующих датчиков, например, резисторных.
На третьем этапе производят обработку полученных результатов измерений, заключающуюся в привязке уровней сигнала, отраженных от исследуемого объекта к уровню сигналов отраженных от калибровочного отражателя с известной ЭПР на каждой длине волны, поляризации поля облучения и приема, и их привязке к углу разноса каждого пассивного ретранслятора линии.
Многопозиционный радиолокационный измерительный комплекс для измерения ЭПР объектов, содержит (фиг.1, фиг.2) генератор синхроимпульсов - 1, N измерительных РЛС фиксированной длины волны - 2.1…2.N, каждая из которых состоит из, импульсного передатчика фиксированной длины волны - 3.1…3.N, волноводного переключателя - 4.1…4.N, двух антенных переключателей - 5.1.1., 5.2.1…5.1.N, 5.2.N, приемопередающего поляризационного расщепителя - 6.1…6.N, приемопередающей антенны 7.1…7.N и двухканального приемного устройства совпадающей и ортогональной поляризации измерительной РЛС - 8.1…8.N, а также содержит исследуемый объект - 9, калибровочный отражатель - 10, N разнесенных приемных устройств - 11.1…11.N, каждое из которых состоит из приемной антенны - 12.1…12.N, приемного поляризационного расщепителя - 13.1…13.N, двух приемных антенных переключателей - 14.1.1, 14.2.1…14.1.N, 14.2.N и двухканального приемного устройства совпадающей и ортогональной поляризации разнесенного приемного устройства - 15.1…15.N, регистрирующее устройство - 16, пассивные ретрансляторы - 17.1…17.M, каждый из которых состоит из плоской ромбической пластины - 18.1…18.М, установленной на малоотражающей мачте с возможностью наведения по угловым координатам и перемещения в вертикальной плоскости - 19.1…19.M, поворотную платформу - 20 и датчик углового положения исследуемого объекта или калибровочного отражателя поворотной платформы - 21, причем выход генератора синхроимпульсов - 1 соединен с импульсными передатчиками фиксированной длины волны - 3.1…3.N, выход которых соединен с волноводными переключателями - 4.1…4.N, и через соответствующий антенный переключатель - 5.1.1., 5.2.1…5.1.N, 5.2.N и поляризационный расщепитель 6.1…6.N соединен с приемо-передающей антенной 7.1…7.N, в режиме измерений моностатической ЭПР исследуемого объекта - 9, связанной по радиолокационному каналу «передающий сигнал - отраженный сигнал» с исследуемым объектом - 9 или калибровочным отражателем - 10, выход каждой приемо-передающей антенны 7.1…7.N через приемопередающие поляризационные расщепители - 6.1…6.N, антенные переключатели - 5.1.1., 5.2.1…5.1.N, 5.2.N соединен с двухканальным приемным устройством совпадающей и ортогональной поляризаций измерительной РЛС фиксированной длины волны - 8.1…8.N, выходы которого соединены с соответствующими входами регистрирующего устройства - 16. Для обеспечения режима измерений бистатической ЭПР исследуемого объекта - 9 комплекс содержит пассивные ретрансляторы - 17.1…17.M, связанные по радиолокационному каналу с приемопередающими антеннами 7.1…7.N и исследуемым объектом - 9 или калибровочным отражателем - 10, и обладающие низким (менее - 30 дБ) уровнем боковых лепестков бистатической индикатрисы рассеяния, выполненные в виде плоских ромбических пластин - 18.1…18.M, размеры которых обеспечивают требуемую разрешающую способность многопозиционного радиолокационного измерительного комплекса в вертикальной и горизонтальной плоскостях, установленных на малоотражающих мачтах - 19.1…19.M, с возможностью их наведения по угловым координатам и перемещения в вертикальной плоскости в пределах высоты каждой малоотражающей мачты, установленных на поверхности земли и ориентированных вдоль оптической оси приемных антенн - 12.1…12.N разнесенных приемных устройств 11.1…11.N, второй выход генератора синхроимпульсов - 1 соединен со входом двухканальных приемных устройств совпадающей и ортогональной поляризации разнесенного приемного устройства - 15.1…15.N для обеспечения стробирования полезного, переотраженного пассивными ретрансляторами 17.1…17.N, рассеянного исследуемым объектом - 9 сигнала или калибровочного отражателя - 10 с фиксированного угла разноса γm, по дальности, при этом выход каждой приемной антенны 12.1…12.N фиксированной длины волны через приемные поляризационные расщепители - 13.1…13.N соединены с приемными антенными переключателями 14.1.1, 14.2.1…14.1.N, 14.2.N и через них соединен с двухканальным приемным устройством совпадающей и ортогональной поляризаций разнесенного приемного устройства - 15.1…15.N, выходы которого соединены с соответствующими входами регистрирующего устройства - 6, к которому также подключен выход датчика углового положения исследуемого объекта - 21 поворотной платформы.
Каждая измерительная РЛС фиксированной длины волны 2.1…2.N установлена на дальности от исследуемого объекта 9
 , где
, где
lАпрд (прм) - размер апертуры приемо-передающей антенны 7.1…7.N;
lоб.max - максимальный линейный размер исследуемого объекта;
λN - рабочая длина волны ИРЛС фиксированной длины волны и синхронизированных от единого генератора синхроимпульсов РИК, причем второй выход генератора синхроимпульсов соединен с третьим входом двухканального приемного устройства совпадающей и ортогональной поляризации разнесенного приемного устройства для обеспечения стробирования полезного, рассеянного исследуемым объектом или калибровочным отражателем сигнала на соответствующем угле разноса, по дальности, при этом пассивные ретрансляторы за счет использования плоской ромбической пластины обладают низким уровнем боковых лепестков бистатической индикатрисы рассеяния и размеры которых обеспечивают требуемое амплитудно-фазовое распределение электромагнитного поля на исследуемом объекте и на трассах R2 «исследуемый объект - пассивный ретранслятор» и R3 «пассивный ретранслятор - приемная антенна разнесенного приемного устройства» в соответствии с требованием дальней зоны
 ,
,
 , где
, где
lоб.max - максимальный линейный размер исследуемого объекта;
a Р - максимальный линейный размер пластины плоского пассивного ретранслятора;
lАпрм - размер апертуры приемной антенны разнесенного приемного устройства на длине волны λN, причем угол ориентации оси линии пассивных ретрансляторов θр определяется минимальным расстоянием R2 min, которое выбирается из условия «дальней зоны»
θр=arcsin(R2 min/R1), где
R2 min - минимальное расстояние между исследуемым объектом и линией пассивных ретрансляторов.
Угол ориентации пассивного ретранслятора относительно оси линии построения пассивных ретрансляторов αРm обеспечивает зеркальное переотражение рассеянного исследуемым объектом или калибровочным отражателем сигнала в направлении приемной антенны разнесенного приемного устройства αРm=(γm+θр)/2, минимальный угол разноса РИК определяется из условия обеспечения дальней зоны в системе «приемная антенна разнесенного приемного устройства - первый пассивный ретранслятор» линии
 , где
, где
R31 - расстояние между приемной антенной разнесенного приемного устройства и первым пассивным ретранслятором линии, при условии R31≥(αРm+lmax)2/λN, а расстояние между соседними пассивными ретрансляторами линии ΔR3=R3m-R3(m-1) должно быть не меньше наихудшей разрешающей способности по дальности многопозиционного РИК ΔRmax≥сτu max/2, при этом пассивные ретрансляторы в линии смещены один относительно другого на величину проекции предыдущего пассивного ретранслятора на плоскость, ортогональную оси линии ΔCm=a Рmsin[(γm+θP)/2], а суммарное смещение пассивных ретрансляторов в линии не превышает ширину диаграммы направленности системы приемных антенн разнесенных приемных устройств с наивысшей разрешающей способностью δΘпрм 0,5 по уровню половинной мощности
 .
.
Поворотная платформа - 20, установлена на уровне поверхности земли и сопряжена с датчиком углового положения исследуемого объекта или калибровочного отражателя - 21, например, резисторного типа.
Радиолокационный измерительный комплекс работает следующим образом.
При измерении моностатической ЭПР исследуемого объекта импульсы синхронизации с генератора синхроимпульсов 1 поступают на запуск импульсного передатчика 3.1…3.N каждой измерительной РЛС фиксированной длины волны и одновременно, в виде «строб-импульса», в двухканальные приемные устройства совпадающей и ортогональной поляризации измерительной РЛС фиксированной длины волны 8.1…8.N. С выхода импульсного передатчика фиксированной длины волны 3.1…3.N импульсы высокочастотных колебаний через волноводный переключатель 4.1…4.N вертикальной или горизонтальной поляризации, антенные переключатели 5.1.1., 5.2.1…5.1.N, 5.2.N и приемопередающий поляризационный расщепитель 6.1…6.N излучаются приемопередающей антенной 7.1…7.N в направлении исследуемого объекта 9 или калибровочного отражателя 10, установленных на дальности R1 (фиг.2) от приемопередающей антенны 7.1…7.N. Излученный приемопередающей антенной 7.1…7.N зондирующий импульс отражается исследуемым объектом в направлении той же антенны 7.1…7.N и, через приемопередающий поляризационный расщепитель 6.1…6.N и антенные переключатели 5.1.1., 5.2.1…5.1.N, 5.2.N, сигналы ортогональных поляризаций поступают на входы двухканального приемного устройства совпадающей и ортогональной поляризации измерительной РЛС фиксированной длины волны 8.1…8.N, где, после выделения им сигналов промежуточной частоты, происходит их усиление, детектирование и стробирование «строб-импульсом», поступающим от генератора синхроимпульсов 1, поступают на вход регистрирующего устройства 16, например, светолучевого (шлейфового) осциллографа типа H-115. Вращение объекта осуществляется в горизонтальной плоскости с помощью поворотной платформы 20, установленной на уровне поверхности земли, сигналы с датчика углового положения объекта или калибровочного отражателя поворотной платформы 21 поступают на вход регистрирующего устройства 16 в реальном масштабе времени.
При измерении бистатической ЭПР исследуемого объекта наведение приемных антенн 12.1…12.N разнесенных приемных устройств 11.1…11.N осуществляется в направлении пассивных ретрансляторов 17.1…17.M, установленных в линию, при этом пассивные ретрансляторы 17.1…17.M в линии смещены один относительно другого на величину проекции предыдущего ретранслятора на плоскость, ортогональную оси линии ΔCm=a
Рmsin[(γm+θР)/2], а суммарное смещение пассивных ретрансляторов 17.1…17.M в линии не превышает ширину диаграммы направленности системы приемных антенн 12.1…12.N разнесенных приемных устройств 11.1…11.N с наивысшей разрешающей способностью δΘпрм 0,5 по уровню половинной мощности  .
.
Наведение приемных антенн 12.1…12.N на линию пассивных ретрансляторов производится по максимуму отраженного сигнала от эффективного бистатического калибровочного отражателя 10, например, вертикально установленного цилиндра. Излученные приемопередающими антеннами 7.1…7.N зондирующие импульсы переотражается от исследуемого объекта 9 или калибровочного отражателя 10 в сторону плоских ромбических пластин 18.1…18.M пассивных ретрансляторов 17.1…17.M, установленных на дальности R2 от исследуемого объекта 9 и на дальности R3 от приемных антенн 12.1…12.N разнесенных приемных устройств (фиг.1, фиг.2), на малоотражающих мачтах 19.1…19.M, например, металлической ферме, покрытой шиповидным радиопоглощающим материалом, имеющим коэффициент отражения менее 6%. Наведение пассивного ретранслятора в системе «исследуемый объект - пассивный ретранслятор - приемная антенна» производится путем его наведения по угловым координатам и перемещения в вертикальной плоскости по максимуму сигнала на выходе антенн 12.1…12.N, отраженного от калибровочного отражателя 10, установленного на оси вращения поворотной платформы 20. Исследуемый объект 9 и калибровочный отражатель 10 поочередно устанавливаются на поворотной платформе 20, сопряженной с датчиком углового положения исследуемого объекта или калибровочного отражателя 21. Отраженные от исследуемого объекта 9 или калибровочного отражателя 10 сигналы зеркально переотражаются плоской ромбической пластиной пассивного ретранслятора 17.1…17.M в направлении приемных антенн разнесенных приемных устройств 11.1…11.N, при этом угол ориентации оси линии пассивных ретрансляторов θр определяется минимальным расстоянием R2 min, которое выбирается из условия «дальней зоны» θр=arcsin(R2 min/R1). Угол ориентации пассивного ретранслятора относительно оси линии их построения αРm обеспечивает зеркальное переотражение рассеянного исследуемым объектом или калибровочным отражателем сигнала в направлении приемной антенны разнесенного приемного устройства αРm=(γm+θр)/2, а минимальный угол разноса многопозиционного РИК определяется из условия обеспечения дальней зоны в системе «приемная антенна - первый пассивный ретранслятор» линии
 , где
, где
R31 - расстояние между приемной антенной разнесенного приемного устройства и первым пассивным ретранслятором линии, при условии R31≥(a Рm+lmax)2/λ, а расстояние между соседними пассивными ретрансляторами линии ΔR3=R3m-R3(m-1) должно быть не меньше наихудшей разрешающей способности по дальности многопозиционного РИК ΔRmax≥cτu max/2 (фиг.2). С выхода приемных антенн 12.1…12.N совпадающая и кроссовая компоненты отраженного сигнала разделяются на соответствующие волноводные каналы с помощью приемного поляризационного расщепителя 13.1…13.N и по волноводным каналам через приемные антенные переключатели 14.1.1, 14.2.1…14.1.N, 14.2.N поступают на входы двухканальных приемных устройств совпадающей и ортогональной поляризации разнесенного премного устройства 15.1…15.N, где, после выделения им сигналов промежуточной частоты, происходит их усиление, детектирование и стробирование «строб-импульсом», поступающим от генератора синхроимпульсов 1. С выходов каналов совпадающей и кроссовой поляризации двухканальных приемных устройств совпадающей и ортогональной поляризации 15.1…15.N разнесенного премного устройства 11.1…11.N низкочастотные импульсные сигналы (или их огибающие) поступают на входы регистрирующего устройства 16. Контроль за работой комплекса осуществляется операторами с помощью, например, осциллографов - индикаторов. Обработка результатов измерений производится по выходным данным регистрирующего устройства 16.
Работоспособность предложенного способа и комплекса для его реализации подтверждена многократными измерениями, для чего использовались измерительные РЛС с рабочей длиной волны 0,8, 3,2 и 11 см и длительностью зондирующих импульсов 0,1 и 0,2 мкс, в качестве ретрансляторов - плоские ромбические дюралюминиевые пластины с размером диагоналей 1,5×1,5 м, установленные на металлических фермах высотой 3 метра, укрытых накидками из радиопоглощающего материала «Ворс», установленных в линию, совпадающую с осями приемных антенн многоканального подвижного приемного экранированного комплекса ПЭК-3, в качестве исследуемого объекта - автомобили, летательные аппараты, артснаряды различных калибров, калибровочные отражатели в виде цилиндров (фиг.3). Результаты опытных проверок многократно подтвердили техническую реализуемость предлагаемого способа, а также работоспособность, правильность функционирования и высокую не хуже 30% точность измерений, реализующего его, многопозиционного радиолокационного измерительного комплекса. Доработка известного комплекса до предлагаемого не вызывает технических затруднений, так как все новые узлы и системы выполнены на существующей отечественной элементной базе и не требует больших материальных затрат.
Обозначения, принятые на фиг.1 и фиг.2
1 - генератор синхроимпульсов;
2.1…2.N - .измерительные РЛС фиксированной длины волны;
3.1…3.N - импульсные передатчики фиксированной длины волны;
4.1…4.N - волноводные переключатели;
5.1.1, 5.2.1…5.1.N, 5.2.N - антенные переключатели;
6.1…6.N - приемопередающие поляризационные расщепители;
7.1…7.N - приемопередающие антенны;
8.1…8.N - двухканальные приемные устройства совпадающей и ортогональной поляризации измерительной РЛС;
9 - исследуемый объект;
10 - калибровочный отражатель;
11.1…11.N - разнесенные приемные устройства;
12.1…12.N - приемные антенны,
13.1…13.N - приемные поляризационные расщепители;
14.1.1, 14.2.1, … 14.1.N, 14.2.N - приемные антенные переключатели;
15.1…15.N - двухканальные приемные устройства совпадающей и ортогональной поляризации разнесенного приемного устройства;
16 - регистрирующее устройство;
17.1…17.M - пассивные ретрансляторы;
18.1…18.M - плоские ромбические пластины;
19.1…19.M - малоотражающие мачты;
20 - поворотная платформа;
21 - датчик углового положения исследуемого объекта или калибровочного отражателя поворотной платформы.


Приемное устройство с цифровой обработкой принимаемых сигналов
Способ двухуровневого адаптивного управления и система управления для его осуществления
Способ двухуровневого управления и система для его осуществления (варианты)
Способ моделирования процессов централизованного управления техническими средствами и система для его осуществления (варианты)
Устройство обнаружения отказов в резервированной системе
Способ измерения эффективной поверхности рассеяния крупногабаритных массивных объектов в безэховой камере
Система управления корректируемой авиационной бомбой, предназначенной для поражения радиоэлектронных средств противника
Комбинированная система управления корректируемой авиационной бомбой
Устройство восстановления работоспособности системы, резервированной с помощью мажоритарных элементов
Способ поражения наземных станций активных помех бортовым радиолокационным станциям самолетов самонаводящимся по радиоизлучению оружием и система для его осуществления
Приемник простого импульсного сигнала
Способ оценки информационной эффективности системы связи
Способ распознавания цели и устройство для его осуществления
Способ распознавания импульсных радиосигналов в условиях мешающих радиоимпульсов на фоне белого шума
Способ фазовой модуляции и демодуляции высокочастотных сигналов и устройство его реализации
Способ амплитудной и фазовой модуляции, частотной и амплитудной демодуляции высокочастотных сигналов и многофункциональное устройство его реализации
Устройство для буксировки самолетов
Устройство выравнивания платформы подъемных механизмов
Устройство для измерения эффективной площади рассеяния крупногабаритных объектов
Аэродромный энергомодуль на топливных элементах

