Результат интеллектуальной деятельности: СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ЦЕНТРАЛИЗОВАННОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ СРЕДСТВАМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ)
Вид РИД
Изобретение
Изобретения относятся к области моделирования процессов управления и могут быть использованы для моделирования процессов централизованного управления техническими средствами (ТС) различного назначения, например охраны, связи, разведки, защиты информации, радиоэлектронной борьбы, радиолокации и др.
В настоящее время из уровня техники известен способ построения и оптимизации модели для комплекса систем, состоящего по меньшей мере из двух взаимосвязанных и взаимодействующих систем (Патент США №62928452, G06F 9/455, опубл. 02.10.2001 г.). В этом способе, используемом при моделировании работы компьютерной системы, состоящей из многих микросхем, с помощью моделей каждой микросхемы определяются те события, которые происходят в процессе взаимодействия этих моделей и между моделями и эмуляторами, собирающими данные о функционировании и взаимодействии моделей микросхем на более высоком уровне. После этого данные о таких событиях обрабатываются так, чтобы оставить только данные о событиях при взаимодействии моделей микросхем и отфильтровать данные о взаимодействиях моделей микросхем с эмуляторами, поскольку эмуляторы, то есть программы проверки моделей микросхем, работают гораздо быстрее проверяемых моделей и могут вызвать такие события, которые никогда не происходят в реальности.
Ориентированность этого способа на комплексы, состоящие из микросхем, не дает возможности использовать его для моделирования процессов управления техническими средствами.
Известен также способ моделирования канала связи (Россия, патент №2254675, Н03М 13/01, опубл. 20.06.2005 г.). Сущность способа состоит в том, что определяют множество состояний канала связи и вычисляют условные вероятности возникновения ошибки в каждом состоянии канала связи. Далее в соответствии с условной вероятностью ошибки для текущего состояния канала связи получают ошибки в канале связи, при этом определяют вероятность появления безошибочного интервала.
Основным недостатком этого способа является то, что он обеспечивает моделирование только части функций управления, при этом он не позволяет моделировать такие функции управления, как сбор, обработка, анализ данных об объектах воздействия, принятие решения на осуществление воздействия, формирование управляющих команд и передача их техническим средствам.
Наиболее близким по технической сущности к заявляемым является способ моделирования процессов управления техническими средствами (Россия, патент №2331096, G05B 17/00, G06G 7/62, опубл. 10.08.2008 г.). Сущность способа состоит в том, что моделируют канал связи, моделируют прием от вышестоящего пункта управления данных об объектах, назначенных для осуществления воздействия, моделируют формирование базы данных своих технических средств, объектов воздействия и условий обстановки, моделируют анализ принятых данных путем их сравнения с ранее введенными в базу данных, моделируют при необходимости доопределение данных об объектах воздействия, моделируют идентификацию объектов воздействия, моделируют классификацию объектов воздействия, моделируют определение приоритетов объектов воздействия, моделируют формирование списка объектов воздействия в соответствии с полученными значениями их приоритетов, моделируют оценку эффективности осуществления воздействия внесенных в список приоритетных объектов воздействия штатными ТС, моделируют формирование случайным образом списка ТС, значения эффективности которых оказались достаточными для осуществления воздействия на объекты из сформированного списка, моделируют распределение объектов для осуществления воздействия между ТС путем последовательного попарного соотнесения объектов воздействия и ТС из соответствующих сформированных списков, моделируют формирование целеуказания штатным ТС для осуществления воздействия на выбранные объекты, моделируют формирование команд управления в виде управляющих сигналов и передачу их техническим средствам.
Основным недостатком этого способа является то, что он обеспечивает моделирование только части функций управления, при этом он не позволяет моделировать доопределение данных об объектах воздействия на пунктах управления первого уровня в двухуровневой системе управления. Этот недостаток снижает функциональные возможности способа моделирования при использовании известного технического решения в качестве способа моделирования процессов централизованного управления техническими средствами.
В настоящее время из уровня техники известно устройство для моделирования систем массового обслуживания (А.С. СССР №1705833, G06F 15/20, 1992 г.), содержащее элемент И, триггер, три элемента ИЛИ, четыре генератора импульсов со случайным интервалом следования и блок счетчиков. Устройство позволяет моделировать СМО с высоким качеством обслуживания. Заявка, обслуженная с высоким качеством, покидает устройство, заявка с низким качеством обслуживания повторяет или весь цикл обслуживания, или только один тип обслуживания.
Недостатком этого устройства является то, что оно не позволяет моделировать процессы управления техническими средствами.
Известно также устройство для моделирования систем массового обслуживания (А.С. СССР №1418738, G06F 15/20, 1988 г.), содержащее вход, N+1 выходов, N блоков обслуживания заявок, каждый из которых имеет элемент И, триггер, элемент ИЛИ, два генератора импульсов со случайным интервалом следования, причем в каждом блоке обслуживания заявок выход элемента И соединен со входами запуска первого и второго генератора импульсов со случайным интервалом следования и единичным входом триггера, прямой выход которого соединен с первым входом элемента И, первый и второй входы элемента ИЛИ соединены соответственно с выходами первого и второго генераторов импульсов со случайным интервалом следования, выход элемента ИЛИ подключен к нулевому входу триггера, выход первого генератора импульсов со случайным интервалом следования подключен ко входу останова второго генератора импульсов со случайным интервалом следования, выход которого подключен ко входу останова первого генератора импульсов со случайным интервалом следования, второй вход элемента И первого блока обслуживания заявок группы является информационным входом устройства, выход первого генератора импульсов со случайным интервалом следования является выходом обслуживаемых с высоким качеством заявок блока обслуживания заявок группы, выход второго генератора импульсов со случайным интервалом следования К-го блока обслуживания заявок группы  соединен со вторым входом элемента И (К+1)-го блока обслуживания заявок группы.
соединен со вторым входом элемента И (К+1)-го блока обслуживания заявок группы.
Основным недостатком этого устройства является то, что оно обеспечивает моделирование только части функций управления, при этом оно не позволяет моделировать такие функции управления, как сбор, обработка, анализ данных об объектах воздействия, принятие решения на осуществление воздействия, формирование управляющих команд и передача их техническим средствам.
Наиболее близкой к заявляемым системам по своей технической сущности является система моделирования процессов управления техническими средствами (Россия, патент №2331096, G05B 17/00, G06G 7/62, опубл. 10.08.2008 г.), содержащая модель пульта управления, модель блока определения первичных характеристик, первый вход которой соединен с четвертым выходом модели пульта управления, последовательно соединенные с моделью пульта управления модель аппаратуры передачи данных и модель каналообразующей аппаратуры, модель блока измерения первичных характеристик, первый вход которой соединен с выходом модели блока определения первичных характеристик, а первый выход - с третьим входом модели аппаратуры передачи данных, модель блока вычисления вторичных характеристик, первый вход которой соединен с вторым выходом модели блока измерения первичных характеристик, а второй вход - с третьим выходом модели аппаратуры передачи данных, модель блока сравнения первичных характеристик, первый вход которой соединен с третьим выходом модели блока измерения первичных характеристик, первый выход - со вторым входом модели блока определения первичных характеристик, а второй выход - со вторым входом модели блока измерения первичных характеристик, модель линии связи от вышестоящего пункта управления, подключенная ко второму входу модели каналообразующей аппаратуры, второй выход которой соединен со вторым входом модели аппаратуры передачи данных, второй выход которой соединен с первым входом модели пульта управления, модель удаленного блока измерения первичных характеристик, вход которой соединен с третьим выходом, а выход - с третьим входом модели каналообразующей аппаратуры, модель блока селекции объектов по характеристикам, первый вход которой соединен с выходом модели блока вычисления вторичных характеристик, модель устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, первый вход которой соединен со вторым выходом модели пульта управления, второй выход соединен со вторым входом модели блока сравнения первичных характеристик, второй вход - с выходом, а третий выход - со вторым входом модели блока селекции объектов по характеристикам, модель блока сбора и анализа данных об объектах воздействия, первый вход которой соединен с третьим выходом, а выход - со вторым входом модели пульта управления, второй вход соединен с первым выходом модели устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, модель блока идентификации объектов воздействия, первый вход которой соединен с шестым выходом, выход - с четвертым входом модели устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, а второй вход - с пятым выходом модели пульта управления, модель блока классификации объектов воздействия, первый вход которой соединен с седьмым выходом модели пульта управления, второй вход - с восьмым выходом, а первый выход - с пятым входом модели устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, модель блока определения приоритетов объектов воздействия, первый вход которой соединен со вторым выходом модели блока классификации объектов воздействия, второй вход - с четвертым выходом, а первый выход - с шестым входом модели устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, модель блока оценки эффективности воздействия, первый вход которой соединен со вторым выходом модели блока определения приоритетов объектов воздействия, а второй вход - с пятым выходом модели устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, модель блока распределения объектов воздействия между ТС, первый вход которой соединен с третьим выходом модели блока определения приоритетов объектов воздействия, а первый выход - с третьим входом модели устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, модель блока формирования списка ТС по эффективности, вход которой соединен с выходом блока оценки эффективности воздействия, а выход - со вторым входом модели блока распределения объектов воздействия между ТС, модель блока формирования целеуказаний ТС, первый вход которой соединен со вторым выходом модели блока распределения объектов воздействия между ТС, второй вход - с восьмым выходом, а выход - с третьим входом модели пульта управления, модель устройства отображения информации, первый вход которой соединен с шестым выходом модели пульта управления, второй вход - с седьмым выходом модели устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, а третий вход - с третьим выходом модели блока распределения объектов воздействия между ТС, которые совместно с моделью пульта управления образуют модель пункта управления техническими средствами, последовательно соединенные модель каналообразующей аппаратуры технического средства, модель аппаратуры передачи данных технического средства, модель устройства приема команд и адресной выдачи управляющих сигналов и модель устройства управления техническим средством, которые составляют модель пункта управления технического средства, количество которых определяется количеством технических средств, и модель линии связи с ПУ технического средства, вход которой соединен с первым выходом модели каналообразующей аппаратуры, а выход - с входом модели каналообразующей аппаратуры технического средства.
Основным недостатком этой системы моделирования является то, что она обеспечивает моделирование только части функций управления, при этом она не позволяет моделировать доопределение данных об объектах воздействия на пунктах управления первого уровня в двухуровневой системе управления. Этот недостаток снижает функциональные возможности системы моделирования при использовании известного технического решения в качестве системы моделирования процессов централизованного управления техническими средствами.
Задачей, на решение которой направлены предлагаемые изобретения, является расширение функциональных возможностей способа и системы моделирования процессов управления техническими средствами за счет обеспечения моделирования доопределения данных об объектах воздействия на пунктах управления первого уровня в двухуровневой системе управления путем моделирования определения первичных характеристик, моделирования измерения первичных характеристик, моделирования удаленного измерения первичных характеристик, моделирования вычисления вторичных характеристик и моделирования селекции объектов по характеристикам.
Поставленная задача решается за счет того, что в известном способе моделирования процессов централизованного управления техническими средствами, заключающемся в том, что моделируют формирование на пункте управления (ПУ) второго уровня базы данных своих технических средств, объектов воздействия и условий обстановки, моделируют анализ данных о своих ТС, объектах воздействия и условиях обстановки на полноту, моделируют при необходимости доопределение данных об объектах воздействия, моделируют идентификацию объектов воздействия, моделируют классификацию объектов воздействия, моделируют определение приоритетов объектов воздействия, моделируют формирование списка объектов воздействия в соответствии с полученными значениями их приоритетов, моделируют оценку эффективности осуществления воздействия на внесенные в список приоритетных объектов воздействия штатными ТС, моделируют формирование случайным образом списка ТС, значения эффективности которых оказались достаточными для осуществления воздействия на объекты из сформированного списка, моделируют распределение объектов для осуществления воздействия между ТС путем последовательного попарного соотнесения объектов воздействия и ТС из соответствующих сформированных списков, моделируют формирование целеуказания штатным ТС для осуществления воздействия на выбранные объекты, моделируют формирование команд управления в виде управляющих сигналов и передачу их техническим средствам, моделируют канал связи, новым является то, что в первом варианте способа дополнительно одновременно с моделированием доопределения данных об объектах воздействия моделируют формирование команды в виде управляющих сигналов на доопределение данных о своих технических средствах, объектах воздействия и условиях обстановки, моделируют передачу ее по линиям связи на пункты управления первого уровня, моделируют формирование на пунктах управления первого уровня базы данных своего технического средства, объектов воздействия и условий обстановки, моделируют доопределение данных об объектах воздействия путем моделирования определения первичных характеристик, моделирования измерения первичных характеристик, моделирования удаленного измерения первичных характеристик, включающего следующие действия: моделируют передачу на удаленный блок измерения первичных характеристик, входящий в состав каждого пункта управления первого уровня, значений характеристик обнаруженного объекта воздействия, моделируют удаленное измерение первичных характеристик объекта воздействия и моделируют передачу измеренных значений первичных характеристик по обратному каналу; моделирования вычисления вторичных характеристик и моделирования селекции объектов по характеристикам; моделируют передачу на ПУ второго уровня данных о своем техническом средстве, объектах воздействия и условиях обстановки, моделируют сбор на ПУ второго уровня доопределенных данных о состоянии своих технических средств, объектах воздействия и условиях обстановки, моделируют уточнение базы данных своих ТС, объектов воздействия и условий обстановки.
Во втором варианте способа новым является то, что, в отличие от первого варианта, операция моделирования удаленного измерения первичных характеристик включает следующие действия: моделируют передачу на общий для всех пунктов управления первого уровня удаленный блок измерения первичных характеристик значений характеристик обнаруженного объекта воздействия, при необходимости моделируют формирование очереди на удаленное измерение этих характеристик, моделируют удаленное измерение первичных характеристик объекта воздействия, моделируют передачу измеренных значений первичных характеристик на соответствующий ПУ первого уровня, приславшую запрос на измерения.
В третьем варианте способа новым является то, что, в отличие от первого варианта, операция моделирования удаленного измерения первичных характеристик включает следующие действия: моделируют выбор места удаленного измерения первичных характеристик путем выбора одного из соседних пунктов управления первого уровня, удаленного от данного пункта управления на расстояние, обеспечивающее необходимую точность измерения первичных характеристик, моделируют передачу на используемый в качестве удаленного блока измерения первичных характеристик блок измерения первичных характеристик выбранного пункта управления первого уровня значений характеристик обнаруженного объекта воздействия, при необходимости моделируют формирование очереди на удаленное измерение этих характеристик, моделируют удаленное измерение первичных характеристик объекта воздействия, моделируют передачу измеренных значений первичных характеристик на соответствующий ПУ первого уровня, приславшую запрос на измерения.
Поставленная задача решается также за счет того, что в известной системе моделирования процессов централизованного управления техническими средствами, содержащей модель первого пульта управления, модель первого блока определения первичных характеристик, первый вход которой соединен с четвертым выходом модели первого пульта управления, последовательно соединенные с моделью первого пульта управления модель аппаратуры передачи данных второго уровня и модель каналообразующей аппаратуры второго уровня, модель первого блока измерения первичных характеристик, первый вход которой соединен с выходом модели первого блока определения первичных характеристик, а первый выход - с третьим входом модели аппаратуры передачи данных второго уровня, модель первого блока вычисления вторичных характеристик, первый вход которой соединен с вторым выходом модели первого блока измерения первичных характеристик, а второй вход - с третьим выходом модели аппаратуры передачи данных второго уровня, второй вход которой соединен со вторым выходом модели каналообразующей аппаратуры второго уровня, а второй выход - с первым входом модели первого пульта управления, модель первого блока сравнения первичных характеристик, первый вход которой соединен с третьим выходом модели первого блока измерения первичных характеристик, первый выход - со вторым входом модели первого блока определения первичных характеристик, а второй выход - со вторым входом модели первого блока измерения первичных характеристик, модель первого удаленного блока измерения первичных характеристик, вход которой соединен с третьим выходом, а выход - с третьим входом модели каналообразующей аппаратуры второго уровня, модель первого блока селекции объектов по характеристикам, первый вход которой соединен с выходом модели первого блока вычисления вторичных характеристик, модель первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки, первый вход которой соединен со вторым выходом модели первого пульта управления, второй выход соединен со вторым входом модели первого блока сравнения первичных характеристик, второй вход - с выходом, а третий выход - со вторым входом модели первого блока селекции объектов по характеристикам, модель первого блока сбора и анализа данных об объектах воздействия, первый вход которой соединен с третьим выходом, а выход - со вторым входом модели первого пульта управления, второй вход соединен с первым выходом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки, модель блока идентификации объектов воздействия, первый вход которой соединен с шестым выходом, выход - с четвертым входом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки, а второй вход - с пятым выходом модели первого пульта управления, модель блока классификации объектов воздействия, первый вход которой соединен с седьмым выходом модели первого пульта управления, второй вход - с восьмым выходом, а первый выход - с пятым входом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки, модель блока определения приоритетов объектов воздействия, первый вход которой соединен со вторым выходом модели блока классификации объектов воздействия, второй вход - с четвертым выходом, а первый выход - с шестым входом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки, модель блока оценки эффективности воздействия, первый вход которой соединен со вторым выходом модели блока определения приоритетов объектов воздействия, а второй вход - с пятым выходом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки, модель блока распределения объектов воздействия между ТС, первый вход которой соединен с третьим выходом модели блока определения приоритетов объектов воздействия, а первый выход - с третьим входом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки, модель блока формирования списка ТС по эффективности, вход которой соединен с выходом блока оценки эффективности воздействия, а выход - со вторым входом модели блока распределения объектов воздействия между ТС, модель блока формирования целеуказаний ТС, первый вход которой соединен со вторым выходом модели блока распределения объектов воздействия между ТС, второй вход - с восьмым выходом, а выход - с третьим входом модели первого пульта управления, модель первого устройства отображения информации, первый вход которой соединен с шестым выходом модели первого пульта управления, второй вход - с седьмым выходом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки, а третий вход - с третьим выходом модели блока распределения объектов воздействия между ТС, которые образуют модель пункта управления второго уровня, последовательно соединенные модель каналообразующей аппаратуры первого уровня, модель аппаратуры передачи данных первого уровня, модель устройства приема команд и адресной выдачи управляющих сигналов и модель устройства управления техническим средством, которые составляют модель пункта управления первого уровня, количество которых определяется количеством технических средств, и модель линий связи с пунктами управления первого уровня, вход которой соединен с первым выходом модели каналообразующей аппаратуры второго уровня, а выход -с входом модели каналообразующей аппаратуры первого уровня, новым является то, что в первом варианте системы в состав каждой модели ПУ первого уровня дополнительно введены модель второго пульта управления, первый выход которой соединен со вторым входом, а первый вход - с четвертым выходом модели аппаратуры передачи данных первого уровня, второй выход которой соединен с третьим входом модели каналообразующей аппаратуры первого уровня, модель второго блока определения первичных характеристик, первый вход которой соединен с четвертым выходом модели второго пульта управления, шестой выход которой соединен со вторым входом модели устройства приема команд и адресной выдачи управляющих сигналов, модель второго блока измерения первичных характеристик, первый вход которой соединен с выходом модели второго блока определения первичных характеристик, а первый выход - с третьим входом модели аппаратуры передачи данных первого уровня, модель второго блока вычисления вторичных характеристик, первый вход которой соединен с вторым выходом модели второго блока измерения первичных характеристик, а второй вход - с третьим выходом модели аппаратуры передачи данных первого уровня, модель второго блока сравнения первичных характеристик, первый вход которой соединен с третьим выходом модели второго блока измерения первичных характеристик, первый выход -со вторым входом модели второго блока определения первичных характеристик, а второй выход - со вторым входом модели второго блока измерения первичных характеристик, модель второго удаленного блока измерения первичных характеристик, вход которой соединен с третьим выходом, а выход - со вторым входом модели каналообразующей аппаратуры первого уровня, модель второго блока селекции объектов по характеристикам, первый вход которой соединен с выходом модели второго блока вычисления вторичных характеристик, модель второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки, первый вход которой соединен со вторым выходом модели второго пульта управления, второй выход соединен со вторым входом модели второго блока сравнения первичных характеристик, второй вход - с выходом, а третий выход - со вторым входом модели второго блока селекции объектов по характеристикам, модель второго блока сбора и анализа данных об объектах воздействия, первый вход которой соединен с третьим выходом, а выход - со вторым входом модели второго пульта управления, второй вход соединен с первым выходом модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки, модель второго устройства отображения информации, первый вход которой соединен с пятым выходом модели второго пульта управления, второй вход - с четвертым выходом модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки, а третий вход - со вторым выходом модели устройства приема команд и адресной выдачи управляющих сигналов.
Во втором варианте системы новым является то, что, в отличие от первого варианта, модель второго удаленного блока измерения первичных характеристик выполнена общей для всех моделей пунктов управления первого уровня, а вторые входы-выходы модели каналообразующей аппаратуры первого уровня каждой модели пункта управления первого уровня подключены к соответствующим входам-выходам 1, …, k, …, К модели второго удаленного блока измерения первичных характеристик.
В третьем варианте системы новым является то, что, в отличие от первого варианта, в качестве модели второго удаленного блока измерения первичных характеристик используется модель второго блока измерения первичных характеристик одной из соседних моделей пунктов управления первого уровня, при этом дополнительно третий вход модели второго блока измерения первичных характеристик каждой модели ПУ первого уровня соединен с пятым выходом модели аппаратуры передачи данных первого уровня, а вторые входы-выходы модели каналообразующей аппаратуры первого уровня каждой модели пункта управления первого уровня соединены между собой, а также тем, что в состав каждой модели пункта управления первого уровня дополнительно введена модель блока выбора места удаленного измерения первичных характеристик, первый вход которой соединен с первым выходом модели второго блока измерения первичных характеристик, второй вход с пятым выходом модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки, а выход с третьим входом модели аппаратуры передачи данных первого уровня.
Перечисленные отличительные признаки заявляемых изобретений позволяют расширить функциональные возможности способа и системы моделирования процессов централизованного управления техническими средствами за счет обеспечения моделирования доопределения данных об объектах воздействия на пунктах управления первого уровня в двухуровневой системе управления путем моделирования определения первичных характеристик, моделирования измерения первичных характеристик, моделирования удаленного измерения первичных характеристик, моделирования вычисления вторичных характеристик и моделирования селекции объектов по характеристикам.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений не известны предлагаемые способы и системы моделирования процессов централизованного управления техническими средствами.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленные последовательность действий способов и построение систем приводит к расширению функциональных возможностей способа и системы моделирования процессов централизованного управления техническими средствами.
Предлагаемые технические решения промышленно применимы, так как основаны на компьютерной технике и средствах моделирования, широко использующихся в системах моделирования процессов управления техническими средствами.
На фиг.1-4 показаны структурные схемы систем моделирования, реализующие способы моделирования процессов централизованного управления техническими средствами.
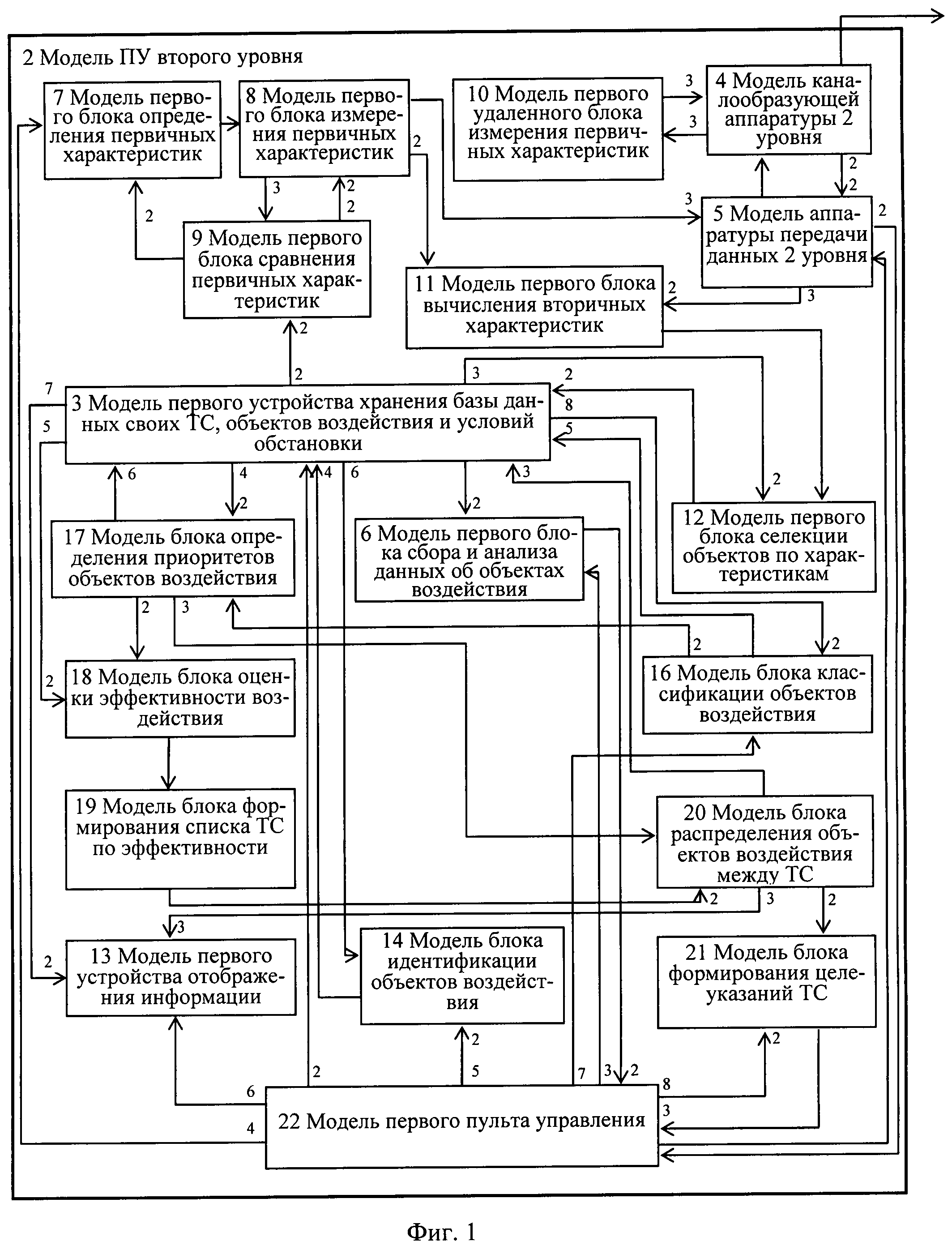
На фиг.1 приведена структурная схема модели пункта управления второго уровня, общая для всех вариантов построения системы моделирования.
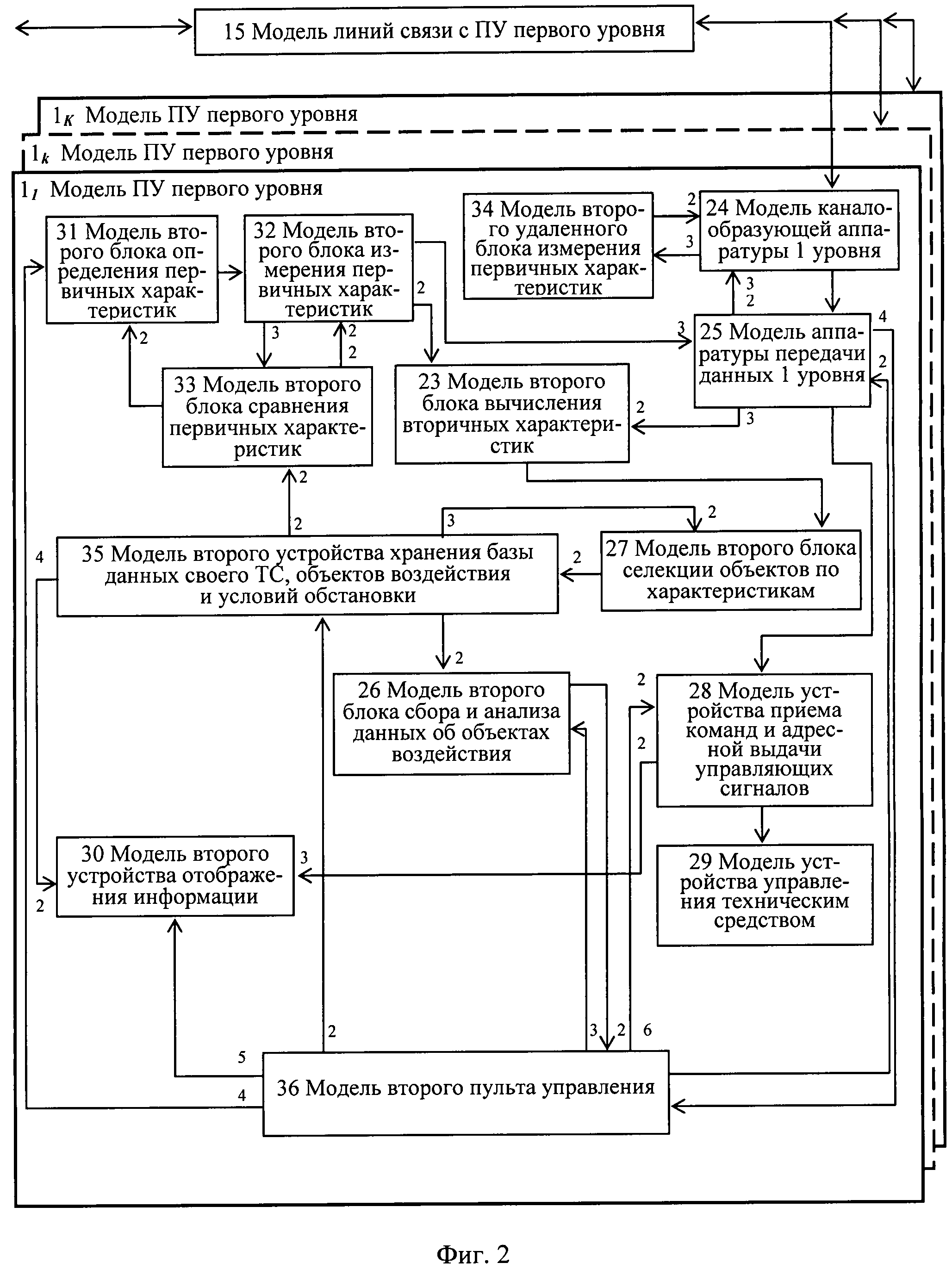
На фиг.2 представлена структурная схема модели пунктов управления первого уровня для первого варианта построения системы моделирования.
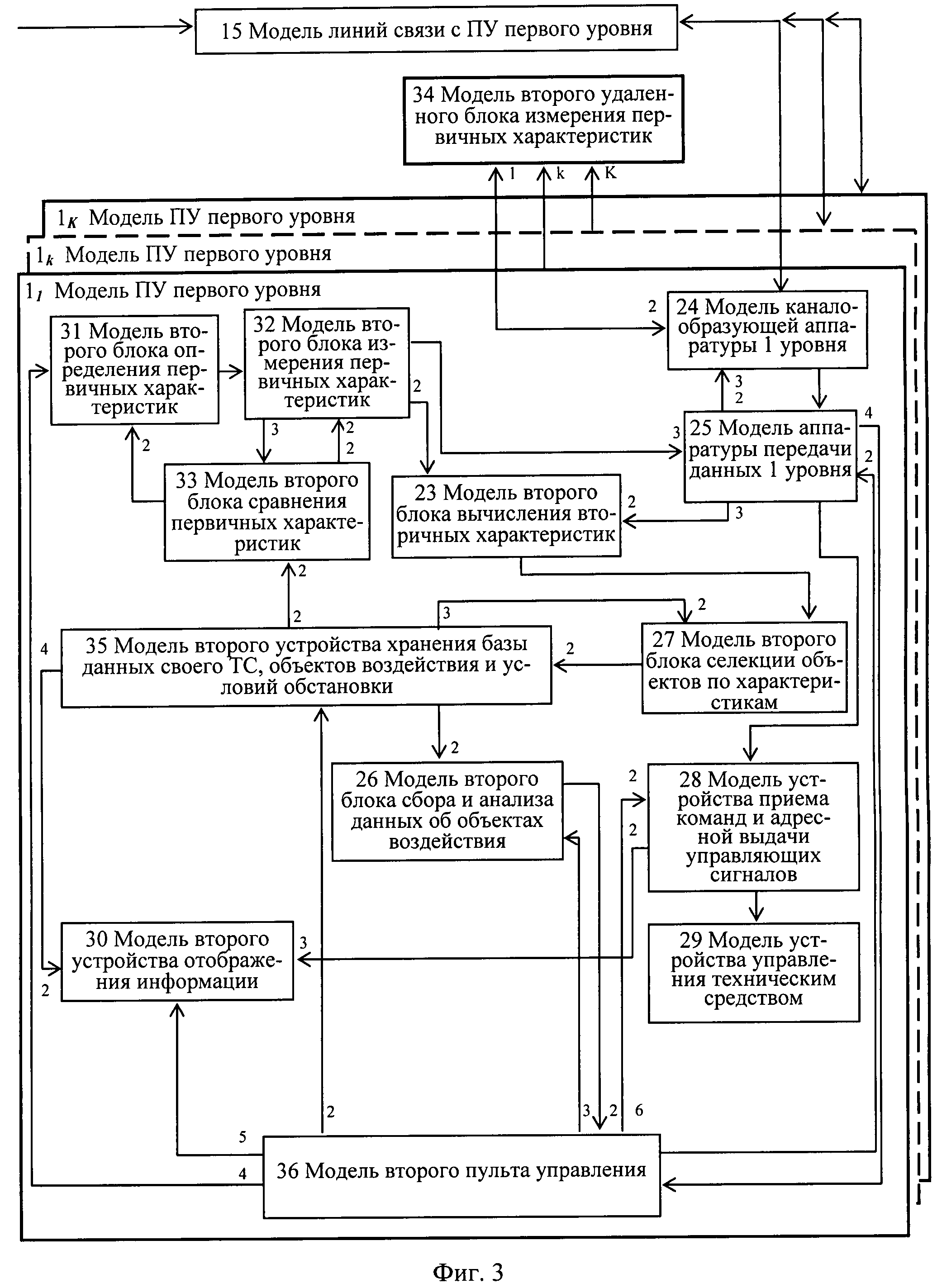
На фиг.3 показана структурная схема модели пунктов управления первого уровня для второго варианта построения системы моделирования.
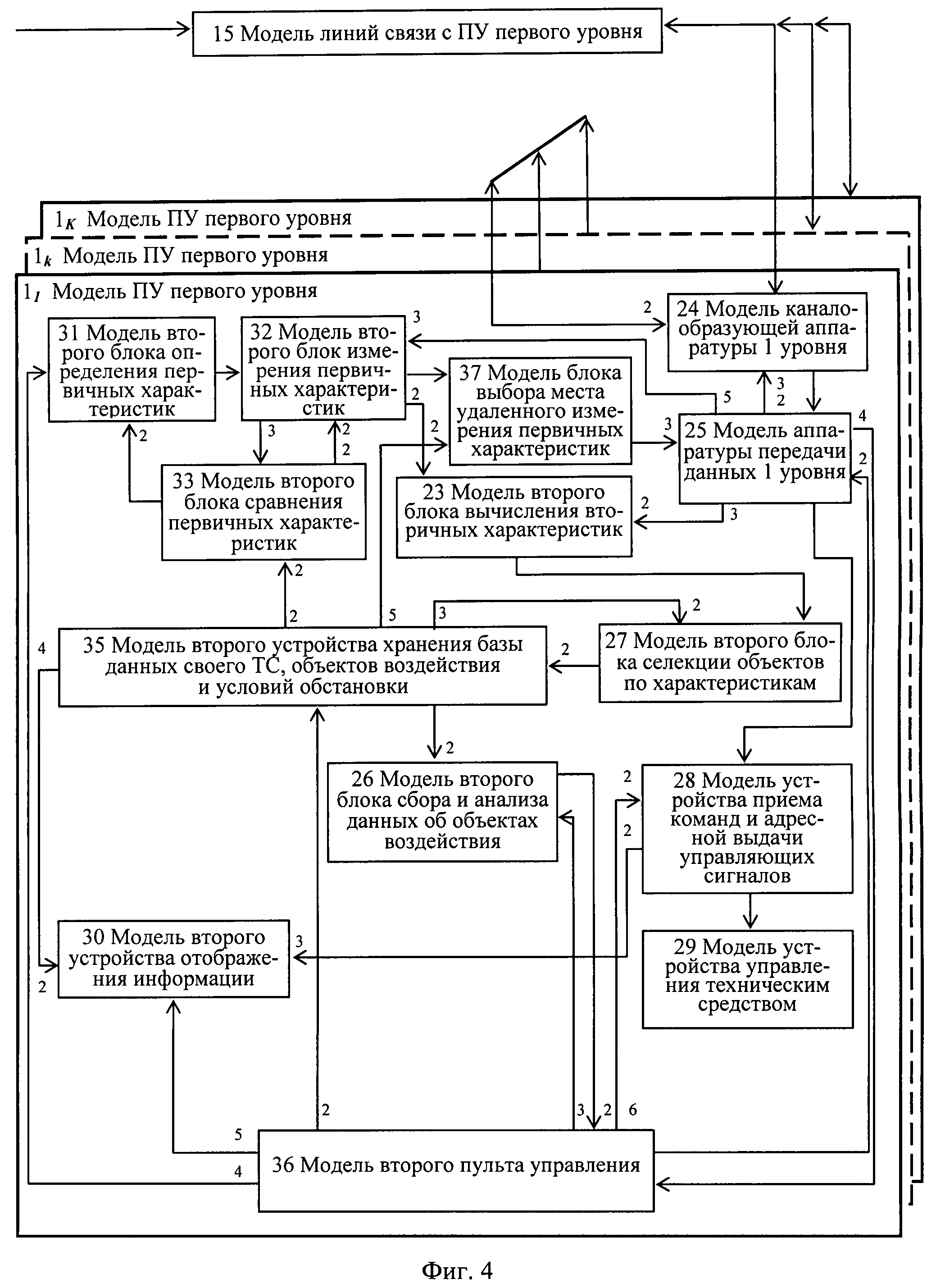
На фиг.4 приведена структурная схема модели пунктов управления первого уровня для третьего варианта построения системы моделирования.
На структурной схеме системы управления цифрами обозначены:
1 - модель пункта управления первого уровня;
2 - модель пункта управления второго уровня;
3 - модель первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки;
4 - модель каналообразующей аппаратуры второго уровня;
5 - модель аппаратуры передачи данных второго уровня;
6 - модель первого блока сбора и анализа данных об объектах воздействия;
7 - модель первого блока определения первичных характеристик;
8 - модель первого блока измерения первичных характеристик;
9 - модель первого блока сравнения первичных характеристик;
10 - модель первого удаленного блока измерения первичных характеристик;
11 - модель первого блока вычисления вторичных характеристик;
12 - модель первого блока селекции объектов по характеристикам;
13 - модель первого устройства отображения информации;
14 - модель блока идентификации объектов воздействия;
15 - модель линий связи с ПУ первого уровня;
16 - модель блока классификации объектов воздействия;
17 - модель блока определения приоритетов объектов воздействия;
18 - модель блока оценки эффективности воздействия;
19 - модель блока формирования списка ТС по эффективности;
20 - модель блока распределения объектов воздействия между ТС;
21 - модель блока формирования целеуказаний ТС;
22 - модель первого пульта управления;
23 - модель второго блока вычисления вторичных характеристик;
24 - модель каналообразующей аппаратуры первого уровня;
25 - модель аппаратуры передачи данных первого уровня;
26 - модель второго блока сбора и анализа данных об объектах воздействия;
27 - модель второго блока селекции объектов по характеристикам;
28 - модель устройства приема команд и адресной выдачи управляющих сигналов;
29 - модель устройства управления техническим средством;
30 - модель второго устройства отображения информации;
31 - модель второго блока определения первичных характеристик;
32 - модель второго блока измерения первичных характеристик;
33 - модель второго блока сравнения первичных характеристик;
34 - модель второго удаленного блока измерения первичных характеристик;
35 - модель второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки;
36 - модель второго пульта управления;
37 - модель блока выбора места удаленного измерения первичных характеристик.
Система моделирования по первому варианту построения (Фиг.1, 2), реализующая первый вариант способа моделирования процессов централизованного управления техническими средствами, содержит модель первого пульта управления 22, модель первого блока определения первичных характеристик 7, первый вход которой соединен с четвертым выходом модели первого пульта управления 22, последовательно соединенные с моделью первого пульта управления 22 модель аппаратуры передачи данных второго уровня 5 и модель каналообразующей аппаратуры второго уровня 4, модель первого блока измерения первичных характеристик 8, первый вход которой соединен с выходом модели первого блока определения первичных характеристик 7, а первый выход - с третьим входом модели аппаратуры передачи данных второго уровня 5, модель первого блока вычисления вторичных характеристик 11, первый вход которой соединен со вторым выходом модели первого блока измерения первичных характеристик 8, а второй вход - с третьим выходом модели аппаратуры передачи данных второго уровня 5, второй вход которой соединен со вторым выходом модели каналообразующей аппаратуры второго уровня 4, а второй выход - с первым входом модели первого пульта управления 22, модель первого блока сравнения первичных характеристик 9, первый вход которой соединен с третьим выходом модели первого блока измерения первичных характеристик 8, первый выход - со вторым входом модели первого блока определения первичных характеристик 7, а второй выход - со вторым входом модели первого блока измерения первичных характеристик 8, модель первого удаленного блока измерения первичных характеристик 10, вход которой соединен с третьим выходом, а выход - с третьим входом модели каналообразующей аппаратуры второго уровня 4, модель первого блока селекции объектов по характеристикам 12, первый вход которой соединен с выходом модели первого блока вычисления вторичных характеристик 11, модель первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, первый вход которой соединен со вторым выходом модели первого пульта управления 22, второй выход соединен со вторым входом модели первого блока сравнения первичных характеристик 9, второй вход - с выходом, а третий выход - со вторым входом модели первого блока селекции объектов по характеристикам 12, модель первого блока сбора и анализа данных об объектах воздействия 6, первый вход которой соединен с третьим выходом, а выход - со вторым входом модели первого пульта управления 22, второй вход соединен с первым выходом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, модель блока идентификации объектов воздействия 14, первый вход которой соединен с шестым выходом, выход - с четвертым входом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, а второй вход - с пятым выходом модели первого пульта управления 22, модель блока классификации объектов воздействия 16, первый вход которой соединен с седьмым выходом модели первого пульта управления 22, второй вход - с восьмым выходом, а первый выход - с пятым входом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, модель блока определения приоритетов объектов воздействия 17, первый вход которой соединен со вторым выходом модели блока классификации объектов воздействия 16, второй вход - с четвертым выходом, а первый выход - с шестым входом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, модель блока оценки эффективности воздействия 18, первый вход которой соединен со вторым выходом модели блока определения приоритетов объектов воздействия 17, а второй вход - с пятым выходом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, модель блока распределения объектов воздействия между ТС 20, первый вход которой соединен с третьим выходом модели блока определения приоритетов объектов воздействия 17, а первый выход - с третьим входом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, модель блока формирования списка ТС по эффективности 19, вход которой соединен с выходом блока оценки эффективности воздействия 18, а выход - со вторым входом модели блока распределения объектов воздействия между ТС 20, модель блока формирования целеуказаний ТС 21, первый вход которой соединен со вторым выходом модели блока распределения объектов воздействия между ТС 20, второй вход - с восьмым выходом, а выход - с третьим входом модели первого пульта управления 22, модель первого устройства отображения информации 13, первый вход которой соединен с шестым выходом модели первого пульта управления 22, второй вход - с седьмым выходом модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, а третий вход - с третьим выходом модели блока распределения объектов воздействия между ТС 20, которые образуют модель пункта управления второго уровня 2.
Система моделирования также содержит последовательно соединенные модель каналообразующей аппаратуры первого уровня 24, модель аппаратуры передачи данных первого уровня 25, модель устройства приема команд и адресной выдачи управляющих сигналов 28 и модель устройства управления техническим средством 29, модель второго пульта управления 36, первый выход которой соединен со вторым входом, а первый вход - с четвертым выходом модели аппаратуры передачи данных первого уровня 25, второй выход которой соединен с третьим входом модели каналообразующей аппаратуры первого уровня 24, модель второго блока определения первичных характеристик 31, первый вход которой соединен с четвертым выходом модели второго пульта управления 36, шестой выход которой соединен со вторым входом модели устройства приема команд и адресной выдачи управляющих сигналов 28, модель второго блока измерения первичных характеристик 32, первый вход которой соединен с выходом модели второго блока определения первичных характеристик 31, а первый выход - с третьим входом модели аппаратуры передачи данных первого уровня 25, модель второго блока вычисления вторичных характеристик 23, первый вход которой соединен со вторым выходом модели второго блока измерения первичных характеристик 32, а второй вход - с третьим выходом модели аппаратуры передачи данных первого уровня 25, модель второго блока сравнения первичных характеристик 33, первый вход которой соединен с третьим выходом модели второго блока измерения первичных характеристик 32, первый выход - со вторым входом модели второго блока определения первичных характеристик 31, а второй выход - со вторым входом модели второго блока измерения первичных характеристик 32, модель второго удаленного блока измерения первичных характеристик 34, вход которой соединен с третьим выходом, а выход - со вторым входом модели каналообразующей аппаратуры первого уровня 24, модель второго блока селекции объектов по характеристикам 27, первый вход которой соединен с выходом модели второго блока вычисления вторичных характеристик 23, модель второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35, первый вход которой соединен со вторым выходом модели второго пульта управления 36, второй выход соединен со вторым входом модели второго блока сравнения первичных характеристик 33, второй вход - с выходом, а третий выход - со вторым входом модели второго блока селекции объектов по характеристикам 27, модель второго блока сбора и анализа данных об объектах воздействия 26, первый вход которой соединен с третьим выходом, а выход - со вторым входом модели второго пульта управления 36, второй вход соединен с первым выходом модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35, модель второго устройства отображения информации 30, первый вход которой соединен с пятым выходом модели второго пульта управления 36, второй вход - с четвертым выходом модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35, а третий вход - со вторым выходом модели устройства приема команд и адресной выдачи управляющих сигналов 28, которые составляют модель пункта управления первого уровня 1, количество которых определяется количеством технических средств, и модель линий связи с пунктами управления первого уровня 15, вход которой соединен с первым выходом модели каналообразующей аппаратуры второго уровня 4, а выход - с входом модели каналообразующей аппаратуры первого уровня 24.
Второй вариант системы (Фиг.1, 3), реализующий второй вариант способа моделирования процессов централизованного управления техническими средствами, в отличие от первого варианта, содержит общую для всех моделей пунктов управления первого уровня 1 модель второго удаленного блока измерения первичных характеристик 34, при этом вторые входы-выходы модели каналообразующей аппаратуры первого уровня 24 каждой модели пункта управления первого уровня 1k подключены к соответствующим входам-выходам 1, …, k, …, К модели второго удаленного блока измерения первичных характеристик 34.
В третьем варианте системы (Фиг.1, 4), реализующем третий вариант способа моделирования процессов централизованного управления техническими средствами, в отличие от первого варианта в качестве модели второго удаленного блока измерения первичных характеристик используется модель второго блока измерения первичных характеристик 32 одной из соседних моделей пунктов управления первого уровня 1k, при этом дополнительно третий вход модели второго блока измерения первичных характеристик 32 каждой модели ПУ первого уровня 1k соединен с пятым выходом модели аппаратуры передачи данных первого уровня 25, а вторые входы-выходы модели каналообразующей аппаратуры первого уровня 24 каждой модели пункта управления первого уровня 1k соединены между собой, также система моделирования содержит в составе каждой модели пункта управления первого уровня 1k модель блока выбора места удаленного измерения первичных характеристик 37, первый вход которой соединен с первым выходом модели второго блока измерения первичных характеристик 32, второй вход с пятым выходом модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35, а выход с третьим входом модели аппаратуры передачи данных первого уровня 25.
Задача системы моделирования состоит в следующем. Моделируя с помощью системы процессы централизованного управления техническими средствами для различных законов распределения случайных временных интервалов их протекания с учетом динамики и специфики применения технических средств и подсчитывая статистические характеристики этих процессов по показаниям счетчиков, подключенных к различным элементам системы моделирования, можно оценивать различные вероятностно-временные характеристики процессов управления автоматизированной системы управления техническими средствами с учетом динамики и специфики ее функционирования, обосновывать требования к ней и пути их обеспечения.
Система моделирования процессов управления техническими средствами работает следующим образом. Моделирование начинается с активизации модели первого пульта управления 22. С помощью модели первого пульта управления 22, которая, как и другие нетиповые модели, выполнена на основе персонального компьютера с соответствующим программным обеспечением для осуществления предусмотренных функций моделирования, вначале моделируют процесс ввода в модель первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3 необходимых для работы исходных данных: список запрещенных для воздействия объектов; определяемых по карте координат (ХПУ2, YПУ2) пункта управления второго уровня и первого удаленного блока измерения первичных характеристик (XУБ1, YУБ2), удаленного от пункта управления второго уровня на расстояние, обеспечивающее необходимую точность измерения первичных характеристик; координат вершин (угловых точек) зоны ответственности системы управления ТС (X3 N, Y3 N),  , где N - количество вершин многоугольника, ограничивающего зону; координаты вершин (угловых точек) участков, запрещенных для размещения объектов воздействия (соответствующих участкам местности (пространства), непригодным для размещения объектов воздействия) (XH UV, YH UV),
, где N - количество вершин многоугольника, ограничивающего зону; координаты вершин (угловых точек) участков, запрещенных для размещения объектов воздействия (соответствующих участкам местности (пространства), непригодным для размещения объектов воздействия) (XH UV, YH UV),  ,
,  , где UH - количество непригодных участков, VH U - количество вершин многоугольника, ограничивающего U-й непригодный участок; номеров и координат ТС и их пунктов управления первого уровня (XTC m, YTC m),
, где UH - количество непригодных участков, VH U - количество вершин многоугольника, ограничивающего U-й непригодный участок; номеров и координат ТС и их пунктов управления первого уровня (XTC m, YTC m),
 где М - количество ТС; их пропускной способности ρm; диапазонов работы; возможностей воздействия Pm; видов воздействий Cm; известных координат объектов воздействия и их характеристик.
где М - количество ТС; их пропускной способности ρm; диапазонов работы; возможностей воздействия Pm; видов воздействий Cm; известных координат объектов воздействия и их характеристик.
По команде с третьего выхода модели первого пульта управления 22 модель первого блока сбора и анализа данных об объектах воздействия 6 считывает из модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3 через свой второй вход ранее введенные исходные данные, анализирует их на полноту и через некоторое случайное время, имитирующее время проведения анализа, формирует сообщение, передаваемое с ее выхода на второй вход модели первого пульта управления 22 о полноте или необходимости доопределения данных об объектах воздействия. На основе этого сообщения модель первого пульта управления 22 моделирует определение областей ответственности пункта управления второго уровня и пунктов управления первого уровня для доопределения данных об объектах, после чего моделирует ввод в модель первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки начала и конца участка диапазона работы модели первого блока определения первичных характеристик 7, а также вырабатывает на своем первом выходе и имитирует передачу с помощью модели аппаратуры передачи данных второго уровня 5, модели каналообразующей аппаратуры второго уровня 4, модели линий связи с ПУ первого уровня 15, модели каналообразующей аппаратуры первого уровня 24 и модели аппаратуры передачи данных первого уровня 25 на первый вход модели второго пульта управления 36 команды в виде управляющих сигналов на доопределение данных о своих технических средствах, объектах воздействия и условиях обстановки в области ответственности пунктов управления первого уровня 1k.
Одновременно с моделированием передачи этой команды передается модельная информация об известных координатах объектов воздействия и о запрещенных для осуществления воздействия объектах для всех трех вариантов построения системы моделирования, при этом для второго варианта построения системы моделирования дополнительно передается информация о координатах второго удаленного блока измерения первичных характеристик, выполненного общим для всех пунктов управления первого уровня 1k, а для третьего варианта передаваемая на каждую модель пункта управления первого уровня 1k дополнительная информация содержит данные о координатах других пунктов управления первого уровня 11, …, 1k-1, 1k+1, …, 1K.
Также одновременно с моделированием передачи команды на ПУ первого уровня модель первого пульта управления 22 вырабатывает на своем четвертом выходе сигнал, разрешающий модели первого блока определения первичных характеристик 7 моделирование перестройки в пределах рабочего диапазона. При имитации попадания обнаруживаемых характеристик объектов воздействия в полосу рабочего диапазона блока определения первичных характеристик производится моделирование измерения его первичных характеристик моделью первого блока измерения первичных характеристик 8. С ее третьего выхода имитируемые значения первичных характеристик поступают на вход модели первого блока сравнения первичных характеристик 9, в которой производится моделирование сравнения обнаруженных первичных характеристик с характеристиками запрещенных для воздействия объектов, считываемыми из модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3 с ее второго выхода. Если имитируемая характеристика обнаруженного объекта воздействия совпала (в пределах моделирования точности измерения) с характеристикой одного из запрещенных объектов, то с выхода модели первого блока сравнения первичных характеристик 9 на второй вход модели первого блока определения первичных характеристик 7 поступает команда на разрешение дальнейшего моделирования перестройки моделью первого блока определения первичных характеристик 7. В противном случае на втором выходе модели первого блока сравнения первичных характеристик 9 появляется имитация сигнала, разрешающего выдачу значения первичной характеристики с выходов модели первого блока измерения первичных характеристик 8 на третий вход модели аппаратуры передачи данных второго уровня 5 и на вход модели первого блока вычисления вторичных характеристик 11. С помощью модели аппаратуры передачи данных второго уровня 5 и модели каналообразующей аппаратуры второго уровня 4 моделируется передача на первый удаленный блок измерения первичных характеристик значения характеристики обнаруженного объекта воздействия. Модель первого удаленного блока измерения первичных характеристик 10 моделирует удаленную настройку на характеристики обнаруженного объекта воздействия, удаленное измерение этих характеристик и передачу их значений по обратному каналу через модель каналообразующей аппаратуры второго уровня 4 на вход модели аппаратуры передачи данных второго уровня 5, с третьего выхода которой имитация значений удаленного измерения первичных характеристик поступает на второй вход модели первого блока вычисления вторичных характеристик 11, которая моделирует вычисление вторичных характеристик обнаруженных объектов воздействия. Модельные значения вторичных характеристик обнаруженных объектов воздействия с выхода модели первого блока вычисления вторичных характеристик 11 через некоторое случайное время, имитирующее время вычисления вторичных характеристик, поступают на вход модели первого блока селекции объектов по характеристикам 12, в которой моделируется их логический анализ с целью установления принадлежности объектов воздействия к зоне ответственности системы управления ТС, модельные значения координат угловых точек которой поступают на второй вход модели первого блока селекции объектов по характеристикам 12 из модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3 с ее третьего выхода. Если в результате моделирования получится, что объект воздействия не принадлежит зоне или его координаты попадают в один из запрещенных участков в пределах зоны, модельные значения координат которых также считываются из модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, то на выходе модели первого блока селекции объектов по характеристикам 12 через некоторое случайное время, имитирующее время анализа, формируется признак, исключающий дальнейшую обработку характеристик обнаруженного объекта воздействия. В противном случае, то есть когда координаты обнаруженного объекта воздействия принадлежат зоне и не принадлежат запрещенным участкам в пределах зоны, такой признак не формируется. С выхода модели первого блока селекции объектов по характеристикам 12 модельные значения характеристик объектов воздействия передаются для записи в модель первого устройства хранения базы данных 3 на ее второй вход.
Одновременно с моделированием этих действий с получением имитации команды на доопределение данных об объектах воздействия и дополнительной модельной информации на ПУ первого уровня 1k с помощью модели второго пульта управления 36 вначале моделируют ввод в модель второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35 полученной информации, а затем необходимых для работы исходных данных: начала и конца участка диапазона работы модели второго блока определения первичных характеристик 31; определяемых по карте координат (ХПУ1, YПУ1) данного пункта управления первого уровня 1k и (только для первого варианта построения системы моделирования) второго удаленного блока измерения первичных характеристик (XУБ2, YУБ2), входящего в состав данного пункта управления первого уровня 1k и удаленного от него на расстояние, обеспечивающее необходимую точность измерения первичных характеристик; координаты вершин (угловых точек) зоны ответственности данного пункта управления первого уровня 1k (X3 N, Y3 N),  , где N - количество вершин многоугольника, ограничивающего зону; координаты вершин (угловых точек) участков, запрещенных для размещения объектов воздействия (соответствующих участкам местности (пространства), непригодным для размещения объектов воздействия) (XH UV, YH UV),
, где N - количество вершин многоугольника, ограничивающего зону; координаты вершин (угловых точек) участков, запрещенных для размещения объектов воздействия (соответствующих участкам местности (пространства), непригодным для размещения объектов воздействия) (XH UV, YH UV),  ,
,  , где UH - количество непригодных участков, VH U - количество вершин многоугольника, ограничивающего U-й непригодный участок; известные координаты объектов воздействия и их характеристики.
, где UH - количество непригодных участков, VH U - количество вершин многоугольника, ограничивающего U-й непригодный участок; известные координаты объектов воздействия и их характеристики.
После этого по команде с третьего выхода модели второго пульта управления 36 модель второго блока сбора и анализа данных об объектах воздействия 26 считывает из модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35 через свой второй вход ранее введенные исходные данные, анализирует их на полноту и через некоторое случайное время, имитирующее время проведения анализа, формирует сообщение, передаваемое с ее выхода на второй вход модели второго пульта управления 36 о полноте или необходимости доопределения данных об объектах воздействия. На основе этого сообщения модель второго пульта управления 36 вырабатывает на своем четвертом выходе сигнал, разрешающий модели второго блока определения первичных характеристик 31 моделирование перестройки в пределах рабочего диапазона. При имитации попадания обнаруживаемых характеристик объектов воздействия в полосу рабочего диапазона блока определения первичных характеристик производится моделирование измерения первичных характеристик моделью второго блока измерения первичных характеристик 32. С ее третьего выхода имитируемые значения первичных характеристик поступают на вход модели второго блока сравнения первичных характеристик 33, в которой производится моделирование сравнения обнаруженных первичных характеристик с характеристиками запрещенных для воздействия объектов, считываемыми из модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35 с ее второго выхода. Если имитируемая характеристика обнаруженного объекта воздействия совпала (в пределах моделирования точности измерения) с характеристикой одного из запрещенных объектов, то с выхода модели второго блока сравнения первичных характеристик 33 на второй вход модели второго блока определения первичных характеристик 31 поступает команда на разрешение дальнейшего моделирования перестройки моделью второго блока определения первичных характеристик 31. В противном случае на втором выходе модели второго блока сравнения первичных характеристик 33 появляется имитация сигнала, разрешающего выдачу значения первичных характеристик с выходов модели второго блока измерения первичных характеристик 32 на первый вход модели второго блока вычисления вторичных характеристик 23 и на третий вход модели аппаратуры передачи данных первого уровня 25.
При этом для третьего варианта построения системы моделирования (Фиг.1) модельные значения первичных характеристик с первого выхода модели второго блока измерения первичных характеристик 32 передают на первый вход модели блока выбора места удаленного измерения первичных характеристик 37, на второй вход которой с пятого выхода модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35 моделируется считывание данных о координатах других пунктов управления первого уровня. На основе этих данных в модели блока выбора места удаленного измерения первичных характеристик 37 моделируют определение блока измерения первичных характеристик одного из соседних пунктов управления первого уровня 11,…, 1k-1, 1k+1, …, 1K, удаленного от данного пункта управления первого уровня 1k на расстояние, обеспечивающее необходимую точность измерения первичных характеристик, который будет использоваться в качестве удаленного блока измерения первичных характеристик. После этого модельные значения первичных характеристик также выдаются на третий вход модели аппаратуры передачи данных первого уровня 25.
Для первого варианта построения системы моделирования (Фиг.1, 2), реализующей первый способ моделирования, с помощью модели аппаратуры передачи данных первого уровня 25 и модели каналообразующей аппаратуры первого уровня 24 моделируют передачу на второй удаленный блок измерения первичных характеристик, входящий в состав каждого ПУ первого уровня, значения характеристик обнаруженного объекта воздействия. Модель второго удаленного блока измерения первичных характеристик 34 осуществляет моделирование настройки на характеристики обнаруженного объекта воздействия, удаленного измерения этих характеристик и передачи их значений по обратному каналу через модель каналообразующей аппаратуры первого уровня 24 на вход модели аппаратуры передачи данных первого уровня 25, с третьего выхода которой имитация значений удаленного измерения первичных характеристик поступает на второй вход модели второго блока вычисления вторичных характеристик 23, которая моделирует вычисление вторичных характеристики обнаруженных объектов воздействия.
Для второго варианта построения системы моделирования (Фиг.1, 3), реализующей второй способ моделирования, в отличие от первого, с помощью модели аппаратуры передачи данных первого уровня 25 и модели каналообразующей аппаратуры первого уровня 24 моделируют предачу значений характеристик обнаруженного объекта воздействия на соответствующий вход 1, …, k, …, К общего для всех пунктов управления первого уровня 1k второго удаленного блока измерения первичных характеристик. Модель второго удаленного блока измерения первичных характеристик 34 при необходимости моделирует формирование очереди на удаленное измерение первичных характеристик, осуществляет моделирование настройки на характеристики обнаруженного объекта воздействия, моделирует удаленное измерение этих характеристик и передачу их значений на соответствующий ПУ первого уровня 1k, приславший запрос на измерения, по обратному каналу через модель каналообразующей аппаратуры первого уровня 24 на вход модели аппаратуры передачи данных первого уровня 25, с третьего выхода которой имитация значений удаленного измерения первичных характеристик поступает на второй вход модели второго блока вычисления вторичных характеристик 23, которая моделирует вычисление вторичных характеристик обнаруженных объектов воздействия.
Для третьего варианта построения системы моделирования (Фиг.1, 4), реализующей третий способ моделирования, в отличие от первого, с помощью модели аппаратуры передачи данных первого уровня 25 и модели каналообразующей аппаратуры первого уровня 24 моделируют передачу на блок измерения первичных характеристик выбранного с помощью модели блока выбора места удаленного измерения первичных характеристик 37 одного из соседних пунктов управления первого уровня значения характеристик обнаруженного объекта воздействия. Модель второго блока измерения первичных характеристик 32 принимает на свой третий вход с пятого выхода модели аппаратуры передачи данных первого уровня 25 модельные значения характеристик обнаруженного на другом ПУ первого уровня объекта воздействия, при необходимости моделирует формирование очереди на удаленное измерение этих характеристик, осуществляет моделирование настройки на характеристики обнаруженного объекта воздействия, моделирует удаленное измерение этих характеристик и передачу их значений по обратному каналу через модель аппаратуры передачи данных первого уровня 25, модель каналообразующей аппаратуры первого уровня 24 своего ПУ, а также модель каналообразующей аппаратуры первого уровня 24 соответствующей модели ПУ первого уровня 1k, приславшей запрос на измерения, на вход модели аппаратуры передачи данных первого уровня 25, с третьего выхода которой имитация значений удаленного измерения первичных характеристик поступает на второй вход модели второго блока вычисления вторичных характеристик 23, которая моделирует вычисление вторичных характеристик обнаруженных объектов воздействия.
Модельные значения вторичных характеристик обнаруженных объектов воздействия с выхода модели второго блока вычисления вторичных характеристик 23 поступают на первый вход модели второго блока селекции объектов по характеристикам 27, в которой осуществляется моделирование их логического анализа с целью установления принадлежности объектов воздействия к зоне ответственности данного пункта управления первого уровня 1k, модельные значения координат угловых точек которой поступают на второй вход модели второго блока селекции объектов по характеристикам 27 из модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35 с ее третьего выхода. Если в результате моделирования анализа получится, что объект воздействия не принадлежит зоне или его координаты попадают в один из запрещенных участков в пределах зоны, модельные значения координат которых также считываются из модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35, то на выходе модели второго блока селекции объектов по характеристикам 27 через некоторое случайное время, имитирующее время анализа, формируется признак, исключающий дальнейшую обработку характеристик обнаруженного объекта воздействия. В противном случае, то есть когда координаты обнаруженного объекта воздействия принадлежат зоне и не принадлежат запрещенным участкам в пределах зоны, такой признак не формируется. С выхода модели второго блока селекции объектов по характеристикам 27 модельные значения характеристик объектов воздействия передаются для записи в модель второго устройства хранения базы данных 35 на ее второй вход.
По окончании моделирования заданного интервала времени ΔT1 функционирования данного пункта управления первого уровня 1k в этом режиме, или после имитации факта обнаружения и доопределения данных о своем техническом средстве, всех требуемых объектах и условиях обстановки или по имитации команды оператора ПУ первого уровня 1k, поступающей с третьего выхода модели второго пульта управления 36 на первый вход модели второго блока сбора и анализа данных об объектах воздействия 26, моделируется считывание моделью второго блока сбора и анализа данных об объектах воздействия 26 информации с первого выхода модели второго устройства хранения базы данных своего ТС, объектов воздействия и условий обстановки 35 на свой второй вход информации о всех доопределенных данных и передача их на второй вход модели второго пульта управления 36. После этого моделируют передачу с первого выхода модели второго пульта управления 36 этой информации в виде последовательности сигналов с помощью модели линий связи 15 на первый вход модели первого пульта управления 22 пункта управления второго уровня 2.
После завершения моделирования на модели пункта управления второго уровня и моделях пунктов управления первого уровня приведенных совокупностей действий на модели ПУ второго уровня 2 моделируют сбор доопределенных данных о состоянии своих технических средств, объектах воздействия и условиях обстановки и передают эти модельные данные со второго выхода модели первого пульта управления 22 на первый вход модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3 для моделирования уточнения базы данных.
По окончании моделирования заданного интервала времени ΔТ2 функционирования пункта управления второго уровня в этом режиме, или после имитации факта обнаружения и доопределения данных обо всех объектах, или по имитации команды оператора, поступающей с пятого выхода модели первого пульта управления 22 на второй вход модели блока идентификации объектов воздействия 14, моделируется считывание блоком идентификации объектов воздействия 14 информации о модельных значениях характеристик обнаруженных объектов воздействия из модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3.
Одновременно на первый вход модели блока идентификации объектов воздействия 14 поступают модельные данные о границах полос зоны ответственности системы управления ТС, которые считываются из модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3 с ее шестого выхода. В модели блока идентификации объектов воздействия 14 моделируется определение признака оперативного назначения объектов воздействия, который формируется на основе совпадения координат объектов воздействия с координатами полос зоны ответственности системы управления ТС, и формирование формуляров объектов воздействия. Сформированная модельная форма формуляра объекта воздействия, содержащая признак оперативного назначения, с выхода модели блока идентификации объектов воздействия 14 поступает на четвертый вход модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3. При необходимости результаты моделирования идентификации объектов воздействия по команде модели первого пульта управления 22 могут быть выданы с седьмого выхода модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3 на второй вход модели первого устройства отображения информации 13 для моделирования их анализа и уточнения оператором пункта управления второго уровня. Модельные значения уточненных данных записываются с модели первого пульта управления 22 в модель первого устройства хранения базы данных 3.
При моделировании начала осуществления воздействия по обнаруженным объектам активизируется модель блока классификации объектов воздействия 16, которая последовательно считывает формуляры объектов воздействия на свой второй вход с восьмого выхода модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3 и моделирует классификацию объектов воздействия с учетом их координат на местности (в пространстве), дистанций между ними и их оперативного назначения. Выдача модельных значений расклассифицированных объектов воздействия с выхода модели блока классификации объектов воздействия 16 осуществляется на первый вход модели блока определения приоритетов объектов воздействия 17 и в модель первого устройства хранения базы данных 3 на ее пятый вход. В модели блока определения приоритетов объектов воздействия 17 моделируется сравнение координат объектов воздействия с координатами полос зоны ответственности системы управления ТС, модельные значения которых считываются с четвертого выхода модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3, и в зависимости от полосы зоны, с координатами которой совпали координаты объектов воздействия, моделируется определение их приоритетов и формирование списка объектов воздействия в соответствии с полученными значениями их приоритетов, который записывается в модель первого устройства хранения базы данных 3 на ее шестой вход и передается на вход модели блока оценки эффективности воздействия 18 и на вход модели блока распределения объектов воздействия между средствами ТС 20. На второй вход модели блока оценки эффективности воздействия 18 поступают с пятого выхода модели первого устройства хранения базы данных своих ТС, объектов воздействия и условий обстановки 3 модельные значения характеристик своих технических средств, с учетом которых моделируется оценка эффективности воздействия на каждый объект воздействия каждым ТС. Для реализации модели блока оценки эффективности воздействия 18 используются программируемые (настраиваемые) многофункциональные средства, алгоритм работы которых может определяться, например, следующими математическими соотношениями.
Критерием достаточной эффективности воздействия является выполнение энергетических условий воздействия на обнаруженные объекты, которые определяются как превышение уровня воздействия над пороговым уровнем в заданное число раз, называемое коэффициентом воздействия (КВ):

где КВ - коэффициент воздействия (при определении достаточной эффективности принят КВ=1,5);
ЕП, ЕВ - соответственно напряженности поля порогового сигнала и сигнала воздействия на входе объекта воздействия.
Напряженность поля сигнала воздействия (ЕВ) на входе объекта воздействия определяется по формуле:

где PP - мощность передатчика технического средства;
GP - коэффициент усиления антенны передатчика технического средства;
r - дистанция воздействия;
v -множитель ослабления на трассе воздействия (дБ).
Полученные модельные значения эффективности воздействия с выхода модели блока оценки эффективности воздействия 18 через некоторое случайное время, имитирующее время оценки эффективности, поступают на вход модели блока формирования списка ТС по эффективности 19, в которой моделируется формирование случайным образом списка ТС, значения эффективности воздействия которых оказались достаточными для осуществления воздействия на объекты из сформированного приоритетного списка. Сформированный список ТС по эффективности воздействия с выхода модели блока формирования списка ТС по эффективности 19 через некоторое случайное время, имитирующее время формирования списка, поступает на второй вход модели блока распределения объектов воздействия между ТС 20. В модели блока распределения объектов воздействия между ТС 20 моделируется распределение объектов для воздействия между ТС путем моделирования последовательного попарного соотнесения объектов воздействия и ТС из соответствующих списков. Совмещенная в модели блока распределения объектов воздействия между средствами ТС 20 информация об объекте воздействия и номере ТС образует имитацию задания для технического средства, которая с выходов модели 20 поступает в модель первого устройства хранения базы данных 3, на вход модели блока формирования целеуказаний ТС 21 и для имитации отображения в модель первого устройства отображения информации 13.
В заданный модельный момент времени TB или по команде с восьмого выхода модели первого пульта управления 22 модель блока формирования целеуказаний ТС 21 моделирует выдачу со своего выхода сформированных целеуказаний на третий вход модели первого пульта управления 22, которая со своего первого выхода моделирует передачу целеуказаний в виде управляющих сигналов через модель аппаратуры передачи данных второго уровня 5 и модель каналообразующей аппаратуры второго уровня 4, модель линий связи с ПУ первого уровня 15, модель каналообразующей аппаратуры первого уровня 24 и модель аппаратуры передачи данных первого уровня 25 на вход модели устройства приема команд и адресной выдачи управляющих сигналов 28, с выхода которой модельные значения управляющих сигналов передаются на модель устройства управления техническим средством 29 соответствующей модели пункта управления первого уровня 1k
При необходимости имитация принятых команд предварительно по команде с шестого выхода модели второго пульта управления 36 на второй вход модели устройства приема команд и адресной выдачи управляющих сигналов 28 может быть выдана со второго выхода модели 28 на третий вход модели второго устройства отображения информации 30 для имитации их анализа и уточнения оператором пункта управления первого уровня 1k. Имитация уточненных команд передается с шестого выхода модели второго пульта управления 36 на второй вход модели устройства приема команд и адресной выдачи управляющих сигналов 28 и далее на модель устройства управления техническим средством 29.
Статистические характеристики процессов централизованного управления техническими средствами могут быть определены по показаниям счетчиков, подключенных к различным элементам системы моделирования. Полученные статистические характеристики для различных законов распределения случайных временных интервалов протекания процессов централизованного управления техническими средствами с учетом динамики и специфики их применения позволяют решать задачи оценивания, прогнозирования и обеспечения показателей эксплуатационных свойств двухуровневой автоматизированной системы централизованного управления техническими средствами, например эффективности, готовности, надежности и других.
Таким образом, как следует из описания реализации способов и работы вариантов системы моделирования процессов централизованного управления техническими средствами, достигается решение поставленной задачи, а именно расширение функциональных возможностей способа и системы моделирования за счет обеспечения моделирования доопределения данных об объектах воздействия на пунктах управления первого уровня в двухуровневой системе управления путем моделирования определения первичных характеристик, моделирования измерения первичных характеристик, моделирования удаленного измерения первичных характеристик, моделирования вычисления вторичных характеристик и моделирования селекции объектов по характеристикам.
Приемное устройство с цифровой обработкой принимаемых сигналов
Способ двухуровневого адаптивного управления и система управления для его осуществления
Способ двухуровневого управления и система управления для его осуществления (варианты)
Способ двухуровневого управления и система для его осуществления (варианты)
Способ моделирования процессов управления техническими средствами и система моделирования для его осуществления
Устройство обнаружения отказов в резервированной системе
Способ выработки решений проблем развития автоматизированной системы управления и система для его осуществления
Способ измерения эффективной поверхности рассеяния крупногабаритных массивных объектов в безэховой камере
Система управления корректируемой авиационной бомбой, предназначенной для поражения радиоэлектронных средств противника
Комбинированная система управления корректируемой авиационной бомбой
Приемник простого импульсного сигнала
Способ оценки информационной эффективности системы связи
Способ распознавания цели и устройство для его осуществления
Способ распознавания импульсных радиосигналов в условиях мешающих радиоимпульсов на фоне белого шума
Способ фазовой модуляции и демодуляции высокочастотных сигналов и устройство его реализации
Способ амплитудной и фазовой модуляции, частотной и амплитудной демодуляции высокочастотных сигналов и многофункциональное устройство его реализации
Устройство для буксировки самолетов
Устройство выравнивания платформы подъемных механизмов
Устройство для измерения эффективной площади рассеяния крупногабаритных объектов
Аэродромный энергомодуль на топливных элементах

