Результат интеллектуальной деятельности: ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА С МЕХАТРОННЫМИ ДВИЖИТЕЛЯМИ
Вид РИД
Изобретение
Изобретение относится к транспортной системе, а именно к подвесной канатной дороге с мехатронными движителями.
Известны подвесные канатные дороги с электроприводом, способы и устройства управления ими, основанное на использовании механических средств и электроавтоматики, а также устройства с использованием магнитной записи на основном канате путем намагничивания отдельных участков каната и считывания записанной информации (Меклер А.Г. Электрооборудование машин непрерывного транспорта. М., Машиностроение, 1973. - С.251-260).
К недостаткам известных канатных дорог относится несовершенство систем управления и контроля, чувствительность к помехам, недостаточная точность и надежность.
Известна подвесная канатная дорога на транспортных средствах которой установлен датчик, в частности лазерный сканер или электронная камера, с помощью которых регистрируются удаление транспортных средств и величины колебаний, используемые для управления приводом канатной дороги (заявка 2008146163/11, 21.11.2008, МПК В61В 7/00).
К недостаткам известного устройства относится сложность, информационная ограниченность, недостаточная помехозащищенность и надежность.
Известно устройство для измерения длины ферромагнитных изделий с использованием метода магнитных меток, заключающегося в нанесении на движущееся изделие импульсным электромагнитом магнитных меток и считывании этих меток магнитным преобразователем (Пат. 2082078 РФ, МКИ G01B 7/04, заявл. 29.03.1994),
Недостатком данного устройства является деформация магнитной метки и ее смешение в продольном направлении при изменении скорости движения и не достаточная точность измерения перемещения.
Известен канат, содержащий сердечник и навитые на него проволочные пряди, причем сердечник выполнен в виде капсул, заполненных ферромагнитной жидкостью, и эластичного магнитного материала, заполняющего зазоры между капсулами и прядями (А.С. SU 1803486, МКИ D07B 1/16, заявл. 25.12.1990).
Известна городская канатная дорога, взятая за прототип, которая является наиболее близкой к предлагаемой, содержащая концевые и промежуточные станции, соединенные между собой путями, состоящими из одного и более тяговых канатов и несущих стальных канатов, на которых посредством каретки, колес и отцепляемого зажима подвешены пассажирские вагоны, приводимые в движение тяговым канатом посредством привода, выполненного дискретным, содержащим мсхатронные движители, у которых все двигатели имеют один блок управления и соединены между собой но принципу электрического вала (Пат. 2412840RU, МПК В61В 7/00, заявл. 24.02.2010).
К недостаткам известной дороги относится соединение электродвигателей мехатронных движителей, установленных на промежуточных опорах дороги, по принципу электрического вала, т.к. схемы электрического вала предназначены для согласованного вращения отдельных механизмов при небольшой разнице моментов, приложенных к разным валам, и не обеспечивают необходимого регулирования скорости электроприводов для равномерного распределения нагрузки, трудно достичь статической и динамической устойчивости системы, кроме того требуется большое количество проводов и силовых кабелей для электрических соединений.
Изобретение направлено на повышение надежности, безопасности и эффективности управления механизмами движения канатной дороги и обеспечение равномерного распределения нагрузки между приводами, устранение чрезмерного провисания и натяжения тягового каната.
Это достигается тем, что подвесная канатная дорога с мехатронными движителями, установленными на промежуточных опорах, содержащая станции, соединенные между собой путями, состоящими из одного и более тяговых и несущих стальных канатов, на которых подвешены транспортные средства, такие как кабины или кресла, приводимые в движение посредством привода тяговым стальным канатом, содержащим дискретно интегрированные в его органический сердечник постоянные магниты, а на опорах установлены датчики контроля и считывания магнитной информации, причем мехатронные движители па опорах, состоят из регулируемых электроприводов и управляющих модулей, связанных с головным управляющим модулем.
При этом каждый управляющий модуль мехатронного движителя состоит из датчиков нагрузки и скорости электродвигателей, датчика контроля магнитной информации, элементов сравнения, усилителей, аналого-цифровых преобразователей, усилительно-преобразовательного блока, дискретно-цифрового преобразователя, управляющего и исполнительного элементов, передающего и приемного устройств, модульного микроконтроллера с мультиплексором, первый и второй входы которого посредством аналого-цифровых преобразователей, усилителей, элементов сравнения, подключенных к выходам датчиков нагрузки и скорости электродвигателей, третий вход через дискретно-цифровой преобразователь и усилительно-преобразовательный блок электрически соединен с датчиком контроля магнитной информации, содержащим два чувствительных элемента, четвертый вход связан с выходом приемного устройства, а первый и второй выходы микроконтроллера, посредством задающих элементов, подключены ко вторым входам элементов сравнения, третий выход - электрически соединен со входом управляющего элемента, который через исполнительный элемент подключен к электродвигателю, четвертый выход - связан со входом передающего устройства.
Причем головной управляющий модуль состоит из усилительно-преобразовательного блока, вход которого электрически связан с выходом датчика считывания магнитной информации, а выход подключен к входу дискретно-цифрового преобразователя, электрически соединенного со входом суммирующего двоичного счетчика, выходы которого электрически связаны с входами блока определения нуги каната и блока определения скорости каната, другой вход которого подключен к выходу таймера, причем выходы блоков пути и скорости через интерфейс подключены к входу управляющего микроконтроллера, выход которого посредством интерфейса связан со входом двоичного счетчика и таймера, при этом управляющий микроконтроллер электрически соединен с пультом оператора, содержащим блок ввода-вывода информации и индикатор, а также подключен к передающему устройств, связанному со входами приемных устройств модульных микроконтроллеров, и к приемному устройству, связанному с передающими устройствами модульных микроконтроллеров.
Техническим результатом является равномерное распределение нагрузки между приводами, устранение чрезмерного провисания и натяжения тягового каната, повышение надежности, безопасности и эффективности функционирования канатной дороги.
На фиг.1 представлена схема подвесной канатной дороги с мехатронными движителями.
Подвесная канатная дорога с мехатронными движителями, установленными на промежуточных опорах, содержащими регулируемые электроприводы 2 и управляющие модули 3, которые состоят из датчиков нагрузки 4 и датчиков скорости 5, входы которых связаны с электродвигателями привода 2, а выходы подключены к одному из входов элементов сравнения нагрузки 6 и скорости 7, вторые входы которых соединены с выходами задающих элементов нагрузки 8 и скорости 9. Выходы элементов сравнения нагрузки 6 и скорости 7 соответственно через усилители 10 и 11, аналого-цифровые преобразователи 12 и 13 связаны с модульным микроконтроллером 14, выходы которого соединены с задающими элементами 8 и 9, а через управляющие модули 15 и исполнительные элементы 16 подключены к электродвигателям привода 2, также один из выходов микроконтроллера 14 связан с входом передающего устройства 17, а другой вход модульного микроконтроллера 14 соединен с выходом приемного устройства 18. Датчик контроля магнитной информации 19, содержащий два чувствительных элемента (на фиг.1 не показано), посредством двухканалыного усилительно-преобразовательного блока 20 и дискретно-цифрового преобразователя 21 электрически соединен с входом модульного микроконтроллера 14. Датчик считывания магнитной информации 22 через усилительно-преобразовательный блок 23 и дискретно-цифровой преобразователь 24 подключен к входу суммирующего двоичного счетчика 25, выходы которого электрически соединены с входами блока определения пути каната 26 и блока определения скорости каната 27, другой вход блока определения скорости каната 27 подключен к выходу таймера 28. Выходы блоков пути каната 26 и определения скорости каната 27 через интерфейс 29 подключены к входу управляющего микроконтроллера 30. Выход управляющего микроконтроллера 30 посредством интерфейса 29 связан с входом двоичного счетчика 25 и таймера 28. Кроме этого управляющий микроконтроллер 30 электрически соединен с пультом оператора 31, содержащим блок ввода-вывода информации 32 и индикатор 33, а также соединен с передающим устройством 34, связанным с входом приемного устройства 18, и с приемным устройством 35, связанным с передающим устройством 17. Связь может осуществляться но проводной или беспроводной линии. Элементы 23-35 объединены в головной управляющий модуль 36.
Подвесная канатная дорога с мехатронными движителями работает следующим образом.
После пуска канатной дороги 1 датчики 4 измеряют нагрузку электродвигателей приводов 2, а датчики 5 определяют скорость вращения ротора электродвигателей или ведущих шкивов приводов 2. Электрические сигналы от датчиков 4 и 5 поступают на входы элементов сравнения нагрузки - 6 и скорости - 7, в которых происходит сравнение измеренных значений нагрузки и скорости с заданными, поступающими от задающих элементов 8 и 9, на входы которых поступают электрические сигналы от модульного микроконтроллера 14. Результаты сравнения элементов 6 и 7 через усилители 10 и 11 и цифроаналоговыс преобразователи 12 и 13 поступают на входы микроконтроллера 14, в котором производится обработки информации, выдача уставок нагрузки и скорости на задающие элементы 8 и 9 и управляющих сигналов через управляющие модули 15 и усилительные элементы 16 на электродвигатели приводов 2, а также передача информации о нагрузке и скорости посредством передающего устройства 17 и приемного устройства 35 на вход управляющего микроконтроллера 30. Схемы управления всех приводов 2 аналогичны.
Датчик контроля магнитной информации 19, осуществляющей контроль количества магнитных меток на двух ветвях каната между опорами, выдаст информацию через усилительно-преобразовательный блок 20 и дискретно-цифровой преобразователь 21 на вход модульного микроконтроллера 14. Информация о количестве меток используется для определения провисания каната между опорами. Считывание магнитных меток каната осуществляет датчик 22, который через усилительно-преобразовательный блок 23 и дискретно-цифровой преобразователь 24 подключен к входу суммирующего двоичного счетчика 25, хранящего информацию о пройденном пути тягового каната в течение одного никла работы. Данная информация используется для определения пройденного пути в блоке 26 и скорости движения каната в блоке 27, связанным с таймером 28. Информация о пути и скорости через интерфейс 29 передастся в память управляющего микроконтроллера 30, который обрабатывает полученную информацию и выдаст управляющие сигналы посредством передающего устройства 34 в приемное устройство 18 и далее на вход модульного микроконтроллера 14, где используется для корректировки управляющих сигналов управляющих модулей электродвигателей приводов 2. В результате корректировки управляющих сигналов происходит изменение скорости вращения ведущих роликов 2, что приводит к равномерному распределению нагрузки между приводами, устранению чрезмерного провисания и натяжения тягового каната. Кроме того отказ одного или нескольких мехатронных движителей не вызывает отказа всей канатной дороги. Поэтому повышается надежность, безопасность и эффективность функционирования канатной дороги.
Каждый цикл осуществляется обнуление суммирующего двоичного счетчика 25, сигналом поступающим от управляющего микроконтроллера 30. Управление системой производится оператором с пульта 31, который имеет блок ввода-вывода информации и индикатор. Блок ввода-вывода информации позволяет осуществлять ввод-вывод программы и данных в намять управляющего микроконтроллера 30. Информацию, хранящуюся в памяти управляющего микроконтроллера, можно посмотреть на индикаторе пульта оператора.
Подвесная канатная дорога с мехатронными движителями, содержащая опоры с установленными на них мехатронными движителями и станции, соединенные между собой путями, состоящими из одного и более тяговых и несущих стальных канатов, на которых подвешены транспортные средства, такие как кабины или кресла, приводимые в движение тяговым канатом посредством привода, отличающаяся тем, что тяговый стальной канат содержит дискретно интегрированные в его органический сердечник постоянные магниты, а на опорах установлены датчики контроля и считывания магнитной информации, причем мехатронные движители на опорах состоят из регулируемых электроприводов и управляющих модулей, связанных с головным управляющим модулем, при этом каждый управляющий модуль мехатронного движителя состоит из датчиков нагрузки и скорости электродвигателей, датчика контроля магнитной информации, элементов сравнения, усилителей, аналого-цифровых преобразователей, усилительно-преобразовательного блока, дискретно-цифрового преобразователя, управляющего и исполнительного элементов, передающего и приемного устройств, модульного микроконтроллера с мультиплексором, первый и второй входы которого посредством аналого-цифровых преобразователей, усилителей, элементов сравнения подключены к выходам датчиков нагрузки и скорости электродвигателей, третий вход через дискретно-цифровой преобразователь и усилительно-преобразовательный блок электрически соединен с датчиком контроля магнитной информации, содержащим два чувствительных элемента, четвертый вход связан с выходом приемного устройства, а первый и второй выходы микроконтроллера, посредством задающих элементов, подключены к вторым входам элементов сравнения, третий выход электрически соединен с входом управляющего элемента, который через исполнительный элемент подключен к электродвигателю, четвертый выход связан с входом передающего устройства, причем головной управляющий модуль состоит из усилительно-преобразовательного блока, вход которого электрически связан с выходом датчика считывания магнитной информации, а выход подключен к входу дискретно-цифрового преобразователя, электрически соединенного с входом суммирующего двоичного счетчика, выходы которого электрически связаны с входами блока определения пути каната и блока определения скорости каната, другой вход которого подключен к выходу таймера, причем выходы блоков пути и скорости через интерфейс подключены к входу управляющего микроконтроллера, выход которого посредством интерфейса связан с входом двоичного счетчика и таймера, при этом управляющий микроконтроллер электрически соединен с пультом оператора, содержащим блок ввода-вывода информации и индикатор, а также подключен к передающему устройству, связанному с входами приемных устройств модульных микроконтроллеров, и к приемному устройству, связанному с передающими устройствами модульных микроконтроллеров.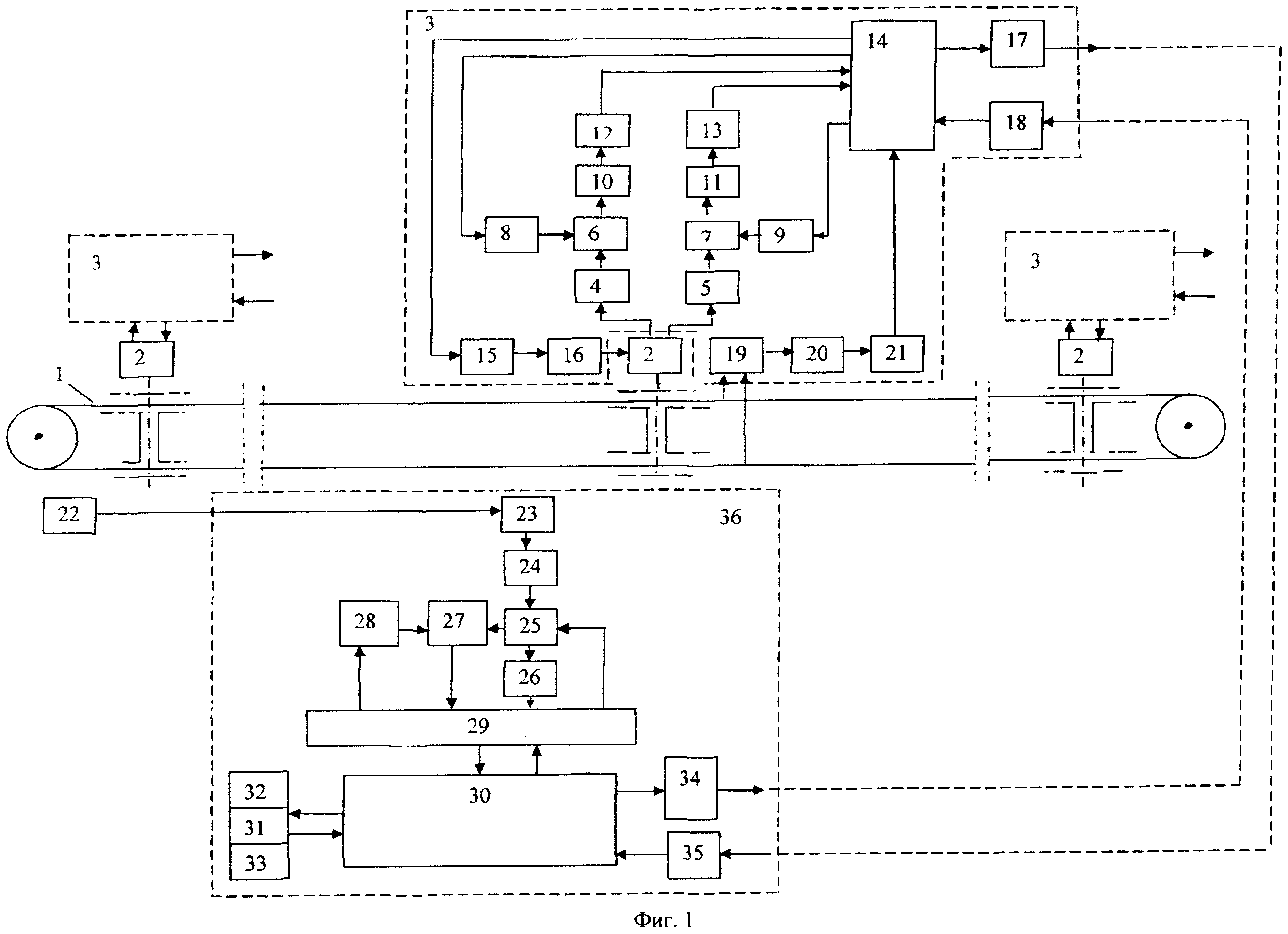
Транспортный мультимодальный комплекс
Транспортная система ("канатное метро")
Канатное зажимное устройство с электромагнитным приводом для отцепляемого подвижного состава подвесной канатной дороги
Грузопассажирский канатно-переправочный комплекс
Канат и способ его дефектоскопии
Транспортная система высотных зданий
Винтовой конвейер
Транспортная система ("канатное метро")
Устройство управления детонационным наращиванием толщины линейных физических объектов
Способ дистанционного контроля за опасными производственными объектами на базе информационно-технологических систем с использованием средств радиочастотной идентификации и комплекс устройств для его реализации
Транспортная система ("канатное метро")
Канатное зажимное устройство с электромагнитным приводом для отцепляемого подвижного состава подвесной канатной дороги
Грузопассажирский канатно-переправочный комплекс
Канат и способ его дефектоскопии
Транспортная система высотных зданий
Транспортная система ("канатное метро")
Устройство управления детонационным наращиванием толщины линейных физических объектов
Способ дистанционного контроля за опасными производственными объектами на базе информационно-технологических систем с использованием средств радиочастотной идентификации и комплекс устройств для его реализации
Каркасный модуль здания
Винтовой конвейер с гибким рабочим органом

