Результат интеллектуальной деятельности: УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА
Вид РИД
Изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах интервального регулирования движения поездов и в различных системах электрической централизации для предотвращения столкновений подвижного состава на станциях.
Известно устройство контроля за управлением поезда, в котором уточнение координаты места нахождения поезда, нормально определяемой с помощью колесного датчика пройденного пути, производят по сигналам от радиомаяков (бализов), установленных на пути и передающих на проходящие локомотивы координаты своего местоположения (СА 2520605, B61L 25/02, 30.03.06).
Недостатком известного устройства является необходимость установки на пути радиомаяков (бализов), что снижает защищенность системы от повреждающих факторов внешней среды и вандализма.
Наиболее близким устройством, выбранным в качестве прототипа, является устройство контроля за управлением поезда и бдительностью машиниста, содержащее блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, и с портом радиомодема, блок вычисления координаты местонахождения локомотива подключен к межмодульному интерфейсу. В устройстве для устранения ложных переключений с АЛС-ЕН на АЛСН при кратковременных пропаданиях сигналов от навигационных спутников содержится блок вычисления координаты местонахождения локомотива, подключенный к межмодульному интерфейсу (RU 94943, B61L 25/04, 10.06.10).
В этом устройстве определение текущей координаты местонахождения локомотива и отслеживание его местонахождения по электронной карте маршрута производят с помощью данных от бортового приемника спутниковой навигации и данных от подсистемы измерения пройденного пути по колесным датчикам импульсов с учетом фиксации прохождения границ рельсовых цепей по смене параметров кодового сигнала, поступающего из рельсовых цепей.
При нормальной работе в устройстве используют алгоритм управления движением поезда с непрерывным контролем скорости и систему АЛС-ЕН с функцией прицельной остановки перед определенной координатой пути. Для определения координаты места нахождения локомотива и для измерения пройденного пути и скорости движения используют данные от приемника спутниковой навигации и электронной карты маршрута, а для точечной коррекции координаты места нахождения локомотива используют изменение параметров кодового сигнала на границах соседних рельсовых цепей. В качестве резервного алгоритма при сбоях в подсистемах, ответственных за определение текущей координаты, используется алгоритм со ступенчатым контролем скорости. По этому алгоритму местонахождение поезда определяется с точностью до рельсовой цепи.
Известное устройство при относительно точном определении координаты не позволяет на станциях определить в каждый момент времени по какому конкретно рельсовому пути из близкорасположенных нескольких рельсовых путей следует поезд. Устройство также обладает низкой устойчивостью к сбоям в работе навигационной системы при наличии электромагнитных и радиопомех при прохождении поезда в местах плохой видимости навигационных спутников и при наличии отраженных сигналов систем спутниковой навигации.
Вследствие этих недостатков из-за невозможности точного определения координаты для сохранения требуемого уровня безопасности движения известное устройство переходит с алгоритма с непрерывным контролем скорости системы АЛС-ЕН на менее точный и производительный алгоритм со ступенчатым контролем скорости системы АЛСН. При этом снижается допустимая скорость движения и безопасность движения из-за отсутствия функции прицельного торможения, особенно для высокоскоростных поездов. Отсутствие непрерывного точного определения рельсового пути, по которому следует поезд в горловинах станций, и замедление скорости движения поезда вводит также дополнительную задержку времени в приготовление маршрутов приема и отправления для других поездов.
Технический результат изобретения заключается в повышении надежности и точности устройства.
Технический результат достигается тем, что в устройство контроля за управлением поезда и бдительностью машиниста, содержащее блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу блок вычисления координаты местонахождения локомотива, модуль маршрута, соединенный с приемником спутниковой навигации, и модуль радиоканала, соединенный с радиомодемом, согласно изобретению введены и подключены к межмодульному интерфейсу приемник сигналов от путевых референцных станций спутниковой навигации и блок инерциальных датчиков скорости, ускорения и углов наклона.
На чертеже представлена структурная схема устройства контроля за управлением поезда и бдительностью машиниста.
Устройство контроля за управлением поезда и бдительностью машиниста содержит блок 1 контроля безопасности, соединенный через усилитель 2 с входом электропневматического клапана 3, входы блока 1 контроля безопасности соединены с выходами модулей 4 и 5 центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу 6, к которому подключены два модуля 7, 8 измерения параметров движения и два модуля 9, 10 непрерывных каналов внешних устройств, входы которых соединены с блоком 11 приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей 7, 8 измерения параметров движения соединены с модулем 12 датчиков пути и скорости, подключенные к межмодульному интерфейсу 6 блок 13 вычисления координаты местонахождения локомотива, модуль 14 маршрута, соединенный с приемником 15 спутниковой навигации, модуль 16 радиоканала, соединенный с радиомодемом 17, приемник 18 сигналов от путевых референцных станций спутниковой навигации и блок 19 инерциальных датчиков скорости, ускорения и углов наклона.
Устройство контроля за управлением поезда и бдительностью машиниста работает следующим образом.
Перед каждой поездкой локомотива, в память модуля 14 маршрута, заносится электронная карта маршрута, построенная на основе эталонной координатной модели железнодорожных путей, которая дополняет электронную карту маршрута геометрическими параметрами пути на всем протяжении железнодорожного пути следования поезда (координаты, длины отрезков, продольные и поперечные уклоны, возвышения рельсов, стрелы изгиба, просадки, рихтовки). Это дает возможность достоверного функционирования инерциальных датчиков скорости, ускорения и углов наклона в блоке 19, которые с заданной периодичностью, например, в 1 секунду калибруются по данным из эталонной координатной модели пути. Описание этой модели известно, например, из патента RU 2287187. Там же приведены примеры методик и математических моделей для совместной оценки комплексированных измерений и параметров движения.
Определение параметров движения осуществляется на основе использования известных методик и математических моделей в модулях 4 и 5 центральной обработки информации с участием блока 13 вычисления координаты местонахождения локомотива. В модули 4 и 5 центральной обработки информации через межмодульный интерфейс 6 передаются данные вычислений от блока 13 вычисления координаты местонахождения локомотива, данные из памяти модуля 14 маршрута и данные реального времени, поступающие от приемника 15 спутниковой навигации, приемника 18 сигналов от путевых референцных станций, блока 19 инерциальных датчиков скорости, ускорения и наклона и модулей 7 и 8 измерения параметров движения.
Приемник 18 сигналов от путевых референцных станций получает через межмодульный интерфейс 6 от радиомодема 17 данные, переданные по радиоканалам цифровой связи о координатах стационарных референцных станций и координатах местонахождения соседних поездов. Эти данные используются для выработки поправок к координатам, информация о которых поступает от приемника 15 спутниковой навигации.
Блок 13 вычисления координаты местонахождения локомотива реализует алгоритмы оптимальной цифровой фильтрации данных реального времени, поступающих от всех блоков данных навигационного назначения. Алгоритмы цифровой фильтрации используют математические модели типа фильтра Кальмана, например, такие как EKF (Extended Kalman Filter). Принцип оптимальной фильтрации основан на геометрическом усреднении векторов, рассчитанных на основе данных о текущих координатах, скоростях, ускорениях, пройденном пути и его геометрических характеристиках в каждой точке с отбрасыванием резких отклонений в данных реального времени от их прогнозируемых расчетом по математическим моделям значений. Пример использования математических моделей типа фильтра Кальмана приведен, в частности, в US 2005065726.
Модули 4 и 5 центральной обработки информации на основе навигационных данных определяют оптимальный скоростной режим, осуществляют контроль бдительности машиниста и, при необходимости, воздействуют через блок 1 контроля безопасности и усилитель 2 на электропневматический клапан 3, который осуществляет торможение поезда. В частности, при приближении поезда к цели модули 4 и 5 центральной обработки информации обеспечивает обязательное снижение скорости поезда до допустимой по условиям безопасности движения в пределах координат расположения цели на электронной карте маршрутов движения.
Если из-за отсутствия достаточного количества качественных данных результат комплексирования теряет требуемую точность и достоверность, блок 13 вычисления координаты местонахождения локомотива через межмодульный интерфейс 6 передает сообщение модулям 4 и 5 центральной обработки информации о нарушении нормального функционирования для перехода на алгоритмы управления движением поезда, допускающие меньшую точность определения местоположения и параметров движения. Например, это происходит, если точность снижается до значений, при которых невозможно надежно определить путь, занятый поездом в горловине станции. Движение поезда по маршруту приема или отправления замедляется с переходом на определение его местоположения устройствами электрической централизации с точностью до изолированных путевых участков.
Модуль 16 радиоканала, подключенный к межмодульному интерфейсу 6, участвует в обеспечении дуплексной связи с поездным диспетчером. В частности, через него от диспетчера машинисту и от машиниста диспетчеру передается информация о номере пути движения для поезда. При получении этой информации машинист с помощью модуля ручного ввода информации (на чертеже не показан) вводит номер пути для передачи его через межмодульный интерфейс 6 в модуль 14 маршрута. Далее по известному номеру пути и данным электронной карты маршрута из памяти модуля 14 маршрута устройство отслеживает цели по маршруту движения поезда. Достоверность того, что машинист и диспетчер не ошиблись при вводе номера пути, проверяется по совпадению координат текущего местонахождения поезда на маршруте, измеряемых навигационной системой устройства с координатами по электронной карте маршрута.
В заявляемом устройстве из-за взаимного резервирования навигационных подсистем, позволяющего получить достаточно точные и надежные данные с более высокой вероятностью и защититься в большинстве случаев от сбоев в работе отдельных блоков получения навигационных данных, переходы на алгоритм со ступенчатым контролем скорости происходят реже. Устройство повышает безопасность движения за счет снижения влияния "человеческого фактора", так как выявляет ошибки, допущенные при ручном вводе номера пути.
Устройство контроля за управлением поезда и бдительностью машиниста, содержащее блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу блок вычисления координаты местонахождения локомотива, модуль маршрута, соединенный с приемником спутниковой навигации, и модуль радиоканала, соединенный с радиомодемом, отличающееся тем, что в него введены и подключены к межмодульному интерфейсу приемник сигналов от путевых референцных станций спутниковой навигации и блок инерциальных датчиков скорости, ускорения и углов наклона.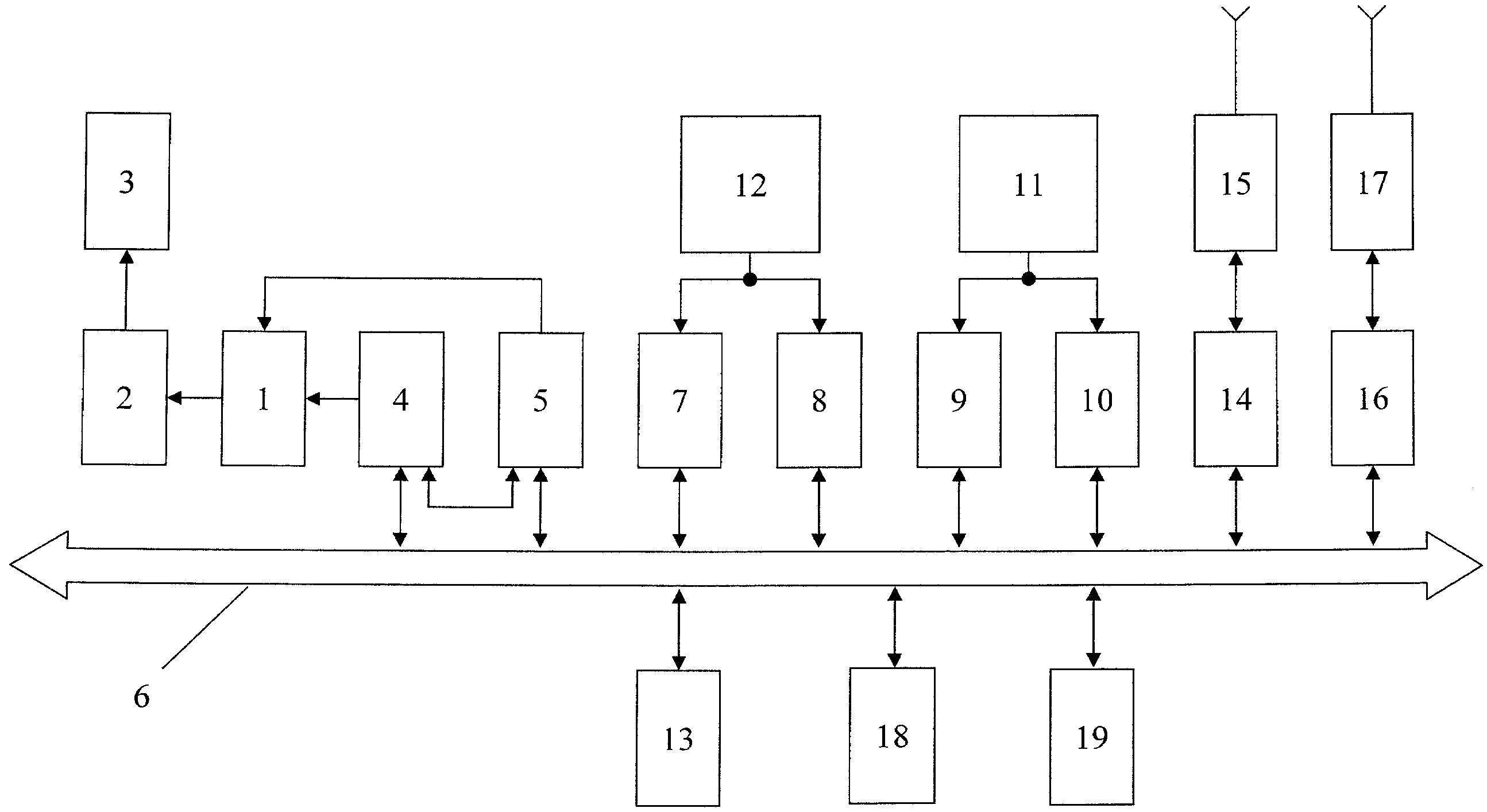
Безопасный локомотивный объединенный комплекс
Безопасный локомотивный объединенный комплекс
Комплексное устройство контроля безопасности движения поезда
Система поездной радиосвязи с линейным комбинированным цифровым каналом (варианты)
Способ определения времени проведения очередного профилактического обслуживания объекта и система для его реализации
Способ и устройство обмена информацией по радиоканалу между поездным локомотивом и стационарным пунктом
Система для управления устройством лубрикации на локомотиве-рельсосмазывателе
Устройство для вентиляции вагонов
Система контроля поверхности катания железнодорожной колесной пары
Устройство для осмотра вагонов
Безопасный локомотивный объединенный комплекс
Безопасный локомотивный объединенный комплекс
Комплексное устройство контроля безопасности движения поезда
Система поездной радиосвязи с линейным комбинированным цифровым каналом (варианты)
Способ определения времени проведения очередного профилактического обслуживания объекта и система для его реализации
Способ и устройство обмена информацией по радиоканалу между поездным локомотивом и стационарным пунктом
Система для управления устройством лубрикации на локомотиве-рельсосмазывателе
Устройство для вентиляции вагонов
Система контроля поверхности катания железнодорожной колесной пары
Устройство для осмотра вагонов

