Результат интеллектуальной деятельности: ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может быть использовано при создании трехосной гирокомпасной системы ориентации (ГСО) ИСЗ на околокруговой орбите.
Наиболее близким аналогом может служить техническое решение, представленное в статье авторов Кэмпелл, Коффи. Цифровая система отсчета углов. Журнал "Вопросы ракетной техники", 1971, №11, стр.63-88. В ней дано описание трехосной системы ориентации в составе блока датчиков угловых скоростей (БДУС), оптического датчика горизонта по крену и тангажу и вычислителя. Погрешности данной системы зависят от погрешностей БДУС и ДАТЧИКА горизонта; элементы автокомпенсации этих погрешностей отсутствуют.
Известны также двухосные системы орбитального гирокомпасирования по крену и курсу: В.А.Бесекерский, В.А.Иванов, Б.Б.Самотокин. Орбитальное гирокомпасирование. Санкт-Петербург, Изд. Политехника, 1993 г. Например, в одной из них на стр.68, 69 (для однороторной гироорбиты с одним трехстепенным гироскопом вместо двух ДУС по крену и по курсу) в контур коррекции, только по курсу которой введен элемент автокомпенсации (интегратор), усложняющий структуру и динамику переходных процессов системы из-за увеличения порядка ее системы дифференциальных уравнений со второго на третий. В другой системе (стр.103) предлагается переусложненная структура элементов автокомпенсации.
Целью предложенного изобретения является создание ГСО повышенной точности путем автокомпенсации ее ошибок по курсу и крену, обусловленных постоянной ошибкой оптического построителя местной вертикали (ПМВ) по крену, а также ошибками, действие которых эквивалентно постоянной ошибке ПМВ: деформации корпуса ИСЗ в полетных условиях из-за невесомости и солнечного нагрева - с сохранением динамики системы.
Согласно предложению, технический результат достигается тем, что в известную гирокомпасную систему ориентации ИСЗ, содержащую последовательно соединенные ПМВ по каналу крена, первый сумматор, первое усилительно-преобразующее устройство (УПУ), второй сумматор, второй вход которого подключен к БДУС по каналу крена, и первый интегратор, выход которого подключен ко второму входу первого сумматора и выходу ГСО по каналу крена,
также последовательно соединенные второе УПУ, вход которого подключен параллельно со входом первого УПУ, третий сумматор, второй вход которого подключен к БДУС по каналу курса, и второй интегратор, выход которого подключен через первый задатчик программной угловой скорости к третьему входу второго сумматора и к выходу ГСО по каналу курса, также последовательно соединенные четвертый сумматор, вход которого подключен к ПМВ по каналу тангажа, третье УПУ, пятый сумматор, второй вход которого подключен к БДУС по каналу тангажа, и третий интегратор, выход которого подключен ко второму входу четвертого сумматора и к выходу ГСО по каналу тангажа, причем третий вход третьего сумматора подключен к выходу первого интегратора через второй задатчик программной угловой скорости, третий вход пятого сумматора подключен к третьему задатчику программной угловой скорости, а также программно-временной задатчик (ПВЗ) режимов работы системы,
введен блок формирования поправок (БФП) по курсу и крену, первый вход которого подключен к выходу первого сумматора, второй, третий и четвертый входы БФП подключены к ПВЗ по каналам «Исходное», «Накопление поправки» и «Введение поправки» соответственно, выход БФП подключен к третьему входу первого сумматора.
При этом БФП выполнен в виде последовательно соединенных нормально-разомкнутых контактов первого коммутатора, вход которых подключен к первому входу БФП, фильтра (ФШС) шумовых сигналов ПМВ, например апериодического звена, цифрового арифметического устройства (ЦАУ), масштабирующего устройства и нормально разомкнутых контактов второго коммутатора, выход которых подключен к выходу БФП, второй вход БФП подключен к управляющим входам первого и второго коммутаторов по каналам «размыкание», третий вход БФП подключен к управляющим входам первого и второго коммутаторов по каналам «замыкание» и «размыкание» соответственно, четвертый вход БФП подключен к управляющим входам первого и второго коммутаторов по каналам «размыкание» и «замыкание» соответственно. Причем алгоритм работы ЦАУ соответствует выражению:
коэффициент масштабирования С масштабирующего устройства соответствует выражению:
где Xвх, XВЫХ - выходной сигналы ЦАУ;
n - число замеров входного сигнала в течение заданного времени, кратного периоду орбитального движения;
K2 - передаточный коэффициент второго УПУ;
Ωп - программная угловая скорость, соответствующая орбитальной угловой скорости ИСЗ.
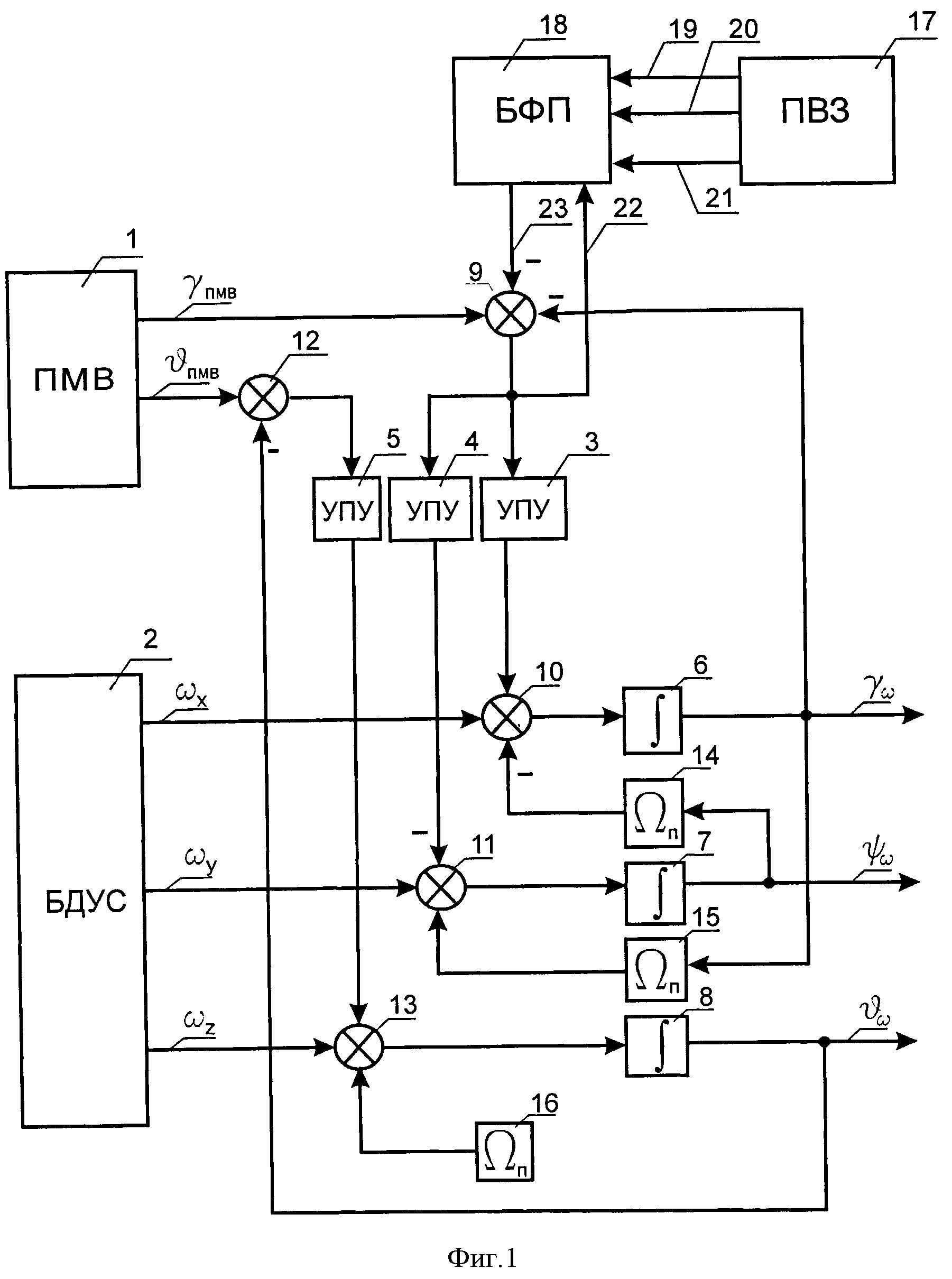
На фигуре 1 представлена структурно-функциональная схема системы;
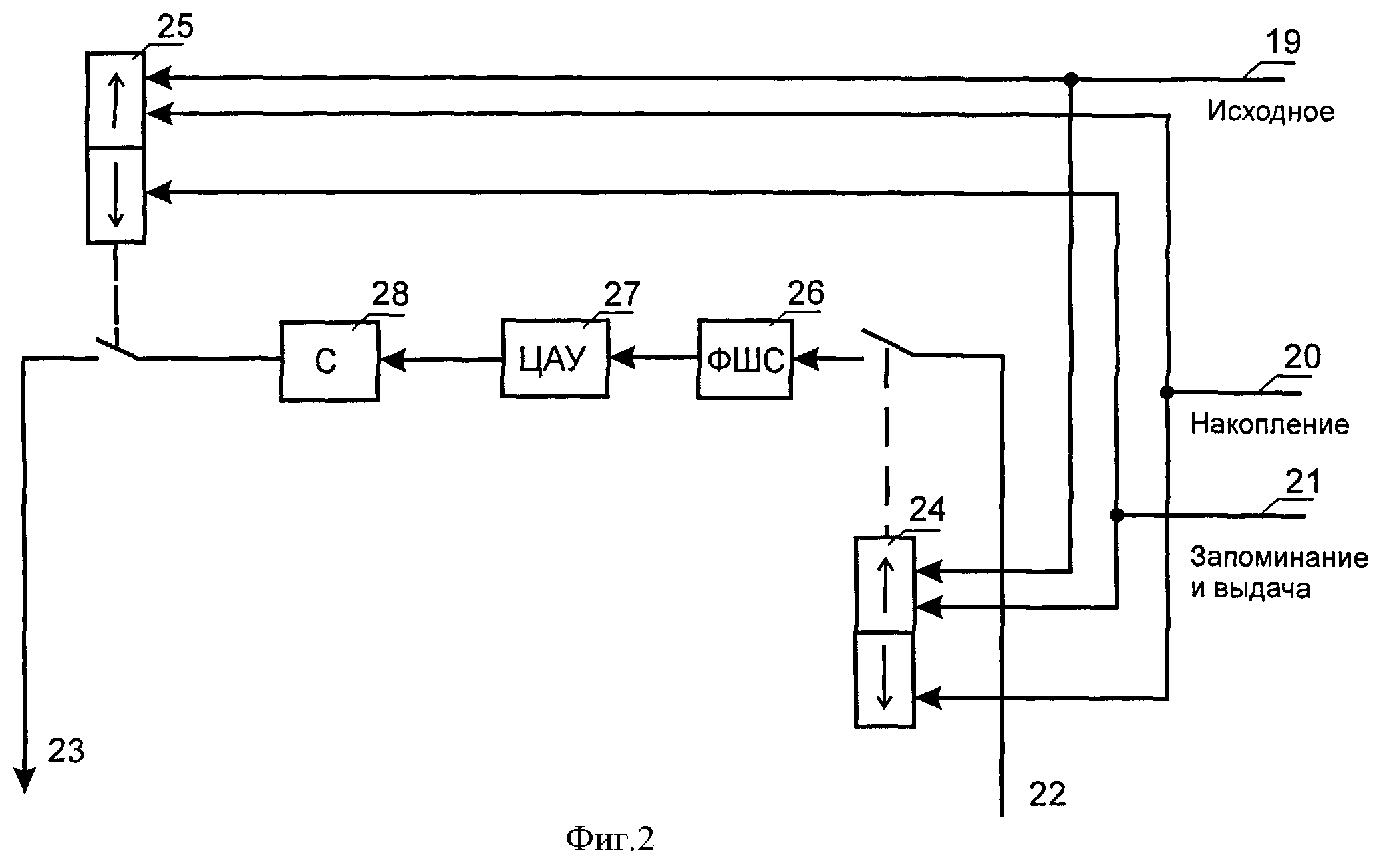
на фигуре 2 - схема входящего блока формирования поправок БФП. На фигуре 1 обозначено:
1 - построитель местной вертикали ПМВ (например, инфракрасный построитель местной вертикали ИКВ);
2 - блок датчиков угловых скоростей БДУС;
3, 4, 5 - первый, второй, третий усилительно-преобразующие устройства УПУ соответственно;
6, 7, 8 - первый, второй, третий интеграторы соответственно;
9, 10, 11, 12, 13 - первый, второй, третий, четвертый, пятый сумматоры соответственно;
14, 15, 16 - задатчики программной орбитальной угловой скорости Ωп движения центра масс ИСЗ на орбите;
17 - программно-временной задатчик ПВЗ началов режимов работы системы;
18 - блок накопления и запоминания (формирования) поправки БФП;
19, 20, 21 - команды соответственно "Исходное", "Накопление поправки", "Запоминание и введение поправки" от программно-временного задатчика ПВЗ;
γПМВ, ϑПМВ - углы крена и тангажа соответственно, формируемые ПМВ;
ωx, ωy, ωz - угловые скорости относительно связанных осей ИСЗ по крену, курсу и тангажу соответственно, формируемые БДУС;
γω, ψω, ϑω - выходные сигналы системы ГСО по крену, курсу и тангажу соответственно;
22 - входной сигнал в БФП от выхода сумматора 9;
23 - выходной сигнал постоянной поправки, формируемый в БФП.
На фигуре 2 обозначено:
24, 25 - первый и второй коммутаторы соответственно;
26 - фильтр (ФШС) шумовых сигналов от ПМВ;
27 - цифровое арифметическое устройство (ЦАУ);
28 - масштабирующее устройство с коэффициентом С (2) в цепи выходного сигнала БФП.
УПУ 3, 4, 5 (фиг 1) могут быть выполнены в виде масштабирующих усилителей; УПУ 5 может также быть выполнен в виде изодромного звена.
Программно-временной задатчик 17 выдает заранее заложенные в него временные команды в соответствующие адреса.
Вновь введенный блок формирования поправок БФП состоит из широко используемых стандартных элементов.
Фильтр шумовых сигналов 26 (фигура 2) выполняется, например, в виде цифрового или аналогово апериодического звена:
с постоянной времени, например T=1c, (уточняется для конкретного ПМВ).
Цифровое арифметическое устройство 27 и масштабирующее устройство 28 также строятся из элементов дискретной техники в соответствии с выражениями (1) и (2).
Коммутаторы 24 и 25 выполнены, например, в виде поляризованных реле с управляемыми контакторами.
Работа предлагаемой ГСО совершается поэтапно.
На первом этапе - в начале орбитального полета ИСЗ при калибровочных работах его составных частей система включается с помощью программно-временного задатчика ПВЗ 17 в режим трехосного орбитального гирокомпасирования без задействования блока формирования поправки БФП (18, см. фигуру 1); для этого на него предварительно выдается от ПВЗ команда «Исходное» 19.
Формирование выходных сигналов системы по крену γω выполняется путем интегрирования в блоке 6 выходного сигнала БДУС по крену ωx корректируемого разностью сигналов крена γПМВ и выходного сигнала системы γω с помощью сумматора 9, УПУ 3 с передаточным коэффициентом К1 и сумматора 10.
Формирование выходного сигнала системы по курсу ψω выполняется путем интегрирования в блоке 7 выходного сигнала БДУС по курсу ωy, корректируемого разностью сигналов крена αПМВ и выходного сигнала αω системы с помощью сумматора 9, УПУ 4 с передаточным коэффициентом К2 и сумматора 11.
Формирование выходного сигнала системы по тангажу ϑω выполняется путем интегрирования в блоке 8 выходного сигнала БДУС по тангажу ωz, корректируемого разностью сигналов тангажа ϑПМВ и выходного сигнала системы по тангажу ϑω с помощью сумматора 12, УПУ 5 и сумматора 13.
Задатчики 14, 15 и 16 программной угловой скорости Ωп, равной средней орбитальной угловой скорости Ω ИСЗ по тангажу, компенсируют проекции вектора Ω на оси чувствительности БДУС по соответствующим каналам крена ωx, курса ωy и тангажа ωz. Тем самым обеспечивается построение приборной орбитальной системы координат.
Задатчик Ωп 16, компенсируя проекцию вектора Ω на ось чувствительности БДУС по каналу тангажа ωz, обеспечивает компенсацию статической ошибки системы по тангажу из-за влияния орбитальной угловой скорости Ω, если УПУ 5 выполнено в виде усилительного звена. Если УПУ 5 будет выполнено в виде изодромного звена, то обеспечится компенсация ошибки системы по тангажу из-за дрейфа БДУС по тангажу и неравенства векторов Ωп и Ω.
Отработка орбитальной угловой скорости по тангажу является необходимым условием работы системы по крену и курсу.
На втором этапе работы системы, по завершении ее начальных переходных процессов, включается по внешней команде 20 (см. фигуры 1 и 2) режим «Накопления поправки» в БФП 18. При этом замыкается контакт коммутирующего устройства 24, подтверждается размыкание контакта коммутирующего устройства 25 и входной сигнал 22 от сумматора 9 поступает на фильтр шумовых сигналов 26, далее - на цифроаналоговое арифметическое устройство 27, затем на масштабирующее устройство 28. Но на выход БФП не проходит, так как контакт коммутатора 25 разомкнут. Поэтому процесс накопления поправки не влияет на динамику орбитального гирокомпасирования системы. Время данного процесса накопления поправки принимается кратным периоду орбитального движения ИСЗ, исходя из того, что погрешности ПМВ имеют гармонические методические составляющие, в том числе с периодом орбитального движения ИСЗ. Частота замеров входных сигналов ЦАУ в течение заданного времени может быть принята, например, равной 0,1-1 Гц. При этом фильтр шумовых сигналов 26 сглаживает сравнительно высокочастотные сигналы ПМВ: собственный инструментальный шум прибора и высокочастотная составляющая методической ошибки ИКВ из-за неравномерности теплового поля Земли. Цифровое арифметическое устройство 27 вырабатывает среднее арифметическое значение выходного сигнала (1) за все время накопления поправки. Масштабирующее устройство 28 обеспечивает масштабное равенство выходного сигнала ЦАУ и компенсируемой ошибки системы.
На третьем этапе работы системы по команде 21 «Запоминание и выдача поправки» контакт коммутатора 24 размыкается, а контакт коммутатора 25 замыкается. Тем самым дальнейший счет поправки прекращается, а запомненное последнее значение выходного сигнала 23 через замкнутый контакт коммутатора 25 поступает на сумматор 9, компенсируя ошибки системы по крену и курсу из-за постоянной погрешности ПМВ по крену и ошибки выставки корпуса ПМВ на ИСЗ с учетом деформации корпуса ИСЗ в новых условиях невесомости. С окончанием переходного процесса по отработке введенной постоянной поправки система продолжает работать при повышенной точности. Тем не менее, рассматривается четвертый этап по уточнению ранее накопленной поправки, например из-за изменения дрейфа параметров приборов и дополнительной деформации корпуса ИСЗ с изменением температурных условий.
На четвертом этапе по повторной команде «Накопление поправки» 20 в БФП продолжается работа второго этапа и тоже в течение времени, кратного периоду орбитального движения. Заканчивается эта работа переходом на третий этап по команде «Запоминание и выдача поправки» 21 с последующим переходным процессом по отработке уточненной части постоянной поправки.
Приведем математическое обоснование повышения точности системы по крену и курсу.
В режиме накопления поправки линеаризованные уравнения системы имеют вид:




где: γω, ψω, ϑω - углы крена, курса, тангажа соответственно на выходе системы;
u23 - выходной сигнал БФП;
ωx, ωy, ωz - угловые скорости крена, курса, тангажа соответственно на выходе БДУС;
γПМВ, ϑПМВ - углы крена, тангажа соответственно на выходе ПМВ;
K1, K2, K3 - передаточные коэффициенты коррекции в каналах крена, курса и тангажа;
Ωп - программная угловая скорость орбитального движения ИСЗ, соответствующая действующей орбитальной скорости;
T - постоянная времени апериодического звена;
То - период орбитального движения КА;
 - символ (оператор) дифференцирования;
- символ (оператор) дифференцирования;
n - число замеров в течение заданного времени, кратного ТO.
При этом





где γИСЗ, ψИСЗ, ϑИСЗ,  ,
,  ,
,  - углы и угловые скорости ИСЗ соответственно по крену, курсу и тангажу относительно орбитальной системы координат ОСК;
- углы и угловые скорости ИСЗ соответственно по крену, курсу и тангажу относительно орбитальной системы координат ОСК;
Δωx, Δωy, Δωz - собственный дрейф гироскопов БДУС по крену, курсу и тангажу соответственно;
ΔγПМВ, ΔϑПМВ - погрешности ПМВ по крену и тангажу и другие погрешности, действие которых эквивалентно погрешностям ПМВ, в частности, погрешности точностной выставки ПМВ относительно связанных осей ИСЗ по крену и тангажу;
Ω - фактическая орбитальная угловая скорость движения центра масс ИСЗ.
Решение системы уравнений (4) и (5) с учетом уравнений (8, 9, 11) имеет вид:


где Δαω, Δψω - погрешности СО по крену и курсу соответственно.
В установившемся режиме (при р=0) погрешности системы по крену и курсу равны:


Решение уравнения (7) для установившегося режима с учетом уравнений
(11, 15) показывает значение поправки U23, сформированной БФП, для ее последующего введения в выходной сигнал ПМВ (на сумматор 9):
В режиме введения в систему накопленной поправки происходит «замена» прежней погрешности ΔγПМВ на новую погрешность  равную
равную

В этом случае уравнения (15) и (16) установившихся ошибок системы принимают вид:
Приведем числовой пример, показывающий повышение точности системы по крену и курсу при реализации предложения. Пусть
- постоянная составляющая инструментальной погрешности ПМВ по крену равна 4 угл.мин;
- погрешность выставки оси чувствительности ПМВ относительно строительных осей ИСЗ, действие которой эквивалентно погрешности ПМВ, равна 3 угл.мин;
- собственный дрейф гироскопов БДУС равен 0,1 град/час;
- коэффициенты коррекции системы равны: K1=0.01 1/сек, K2=0.02 1/сек;
- программная угловая скорость орбитального движения Ωп=0.0011 1/сек.
Тогда, в соответствии с уравнениями (15) и (16) погрешности системы без введения поправки равны:
Δγω=6,8 угл.мин; Δψω=5,1 угл.мин
При введении поправки обновленные погрешности (19,20) уменьшены и составляют:
 ;
; 
Время накопления поправки целесообразно принять равным времени одного периода орбитального движения КА.
По каналу тангажа уравнение (6) независимо от двух уравнений по крену и курсу: (4) и (5). Его решение с учетом уравнений (10) и (12) имеет вид:

В установившемся режиме погрешность системы по тангажу имеет вид:

Нетрудно показать, что при замене УПУ (5, фигура 1) с коэффициентом пропорциональности КЗ на УПУ с изодромным звеном установившаяся ошибка (22) системы по тангажу уменьшится за счет исключения влияния дрейфа гироскопа БДУС по тангажу и неравенства величин Ω и Ωп, то есть

Таким образом в предложенной ГСО устранены ее ошибки по крену и курсу, обусловленные постоянной составляющей ошибки ПМВ по крену и другими ошибками, действие которых эквивалентно постоянной ошибке ПМВ по крену. В процессе формирования поправки, например в течение одного периода орбитального движения ИСЗ, динамика работы ГСО остается неизменной (не ухудшается).
Гирокомпасная система ориентации (ГСО) искусственного спутника Земли, содержащая последовательно соединенные построитель местной вертикали (ПМВ) по каналу крена, первый сумматор, первое усилительно-преобразующее устройство (УПУ), второй сумматор, второй вход которого подключен к блоку датчиков угловых скоростей (БДУС) по каналу крена, и первый интегратор, выход которого подключен ко второму входу первого сумматора и выходу системы по каналу крена, также последовательно соединенные второе УПУ, вход которого подключен параллельно со входом первого УПУ, третий сумматор, второй вход которого подключен к БДУС по каналу курса, и второй интегратор, выход которого подключен через первый задатчик программной угловой скорости к третьему входу второго сумматора и выходу системы по каналу курса, также последовательно соединенные четвертый сумматор, вход которого подключен к ПМВ по каналу тангажа, третье УПУ, пятый сумматор, второй вход которого подключен к БДУС по каналу тангажа, и третий интегратор, выход которого подключен ко второму входу четвертого сумматора и к выходу ГСО по каналу тангажа, причем третий вход третьего сумматора подключен к выходу первого интегратора через второй задатчик программной угловой скорости, третий вход пятого сумматора подключен к третьему задатчику программной угловой скорости, а также программно-временной задатчик (ПВЗ) режимов работы системы,отличающаяся тем, что в нее введен блок формирования поправок (БФП) по курсу и крену, первый вход которого подключен к выходу первого сумматора, второй, третий и четвертый входы БФП подключены к ПВЗ по каналам «Исходное», «Накопление поправки» и «Введение поправки» соответственно, выход БФП подключен к третьему входу первого сумматора, причем БФП выполнен в виде последовательно соединенных нормально разомкнутых контактов первого коммутатора, вход которых подключен к первому входу БФП, фильтра шумовых сигналов, например апериодического звена, цифрового арифметического устройства (ЦАУ), масштабирующего устройства и нормально разомкнутых контактов второго коммутатора, выход которых подключен к выходу БФП, второй вход БФП подключен к управляющим входам первого и второго коммутаторов по каналам «размыкание», третий вход БФП подключен к управляющим входам первого и второго коммутаторов по каналам «замыкание» и «размыкание» соответственно, четвертый вход БФП подключен к управляющим входам первого и второго коммутаторов по каналам «размыкание» и «замыкание» соответственно,причем алгоритм работы ЦАУ соответствует выражению: ,коэффициент масштабирования С масштабирующего устройства соответствует выражению: где - X, X входной и выходной сигналы ЦАУ;n - число замеров входного сигнала в течение заданного времени, кратного периоду орбитального движения;K - передаточный коэффициент второго УПУ;Ω - программная угловая скорость, соответствующая орбитальной угловой скорости ИСЗ.
Гирокомпасная система ориентации искусственного спутника земли
Способ ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса и система для его осуществления
Система электропитания космического аппарата
Способ орбитального гирокомпасирования и устройство для его осуществления
Способ управления полетом ракеты
Способ ориентации космического аппарата и устройство для реализации способа
Способ управления автономной системой электропитания космического аппарата
Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа
Устройство разделения ступеней двухступенчатой ракеты
Транспортно-пусковой контейнер
Гирокомпасная система ориентации искусственного спутника земли
Способ ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса и система для его осуществления
Система электропитания космического аппарата
Способ орбитального гирокомпасирования и устройство для его осуществления
Способ управления полетом ракеты
Способ ориентации космического аппарата и устройство для реализации способа
Способ управления автономной системой электропитания космического аппарата
Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа
Устройство разделения ступеней двухступенчатой ракеты
Способ восстановления курсовой ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса

