Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ ОТКЛОНЕНИЙ
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано для измерения углов взаимной ориентации установочных площадок под приборы научной аппаратуры летательных аппаратов, в машиностроении, станкостроении, а также в горном деле, инженерной геологии, разведочной геофизики в системах контроля проседания земной поверхности.
Известны оптико-электронные устройства для измерения пространственных угловых координат [Высокоточные угловые измерения (под ред. Ю.Г. Якушенкова) М: Машиностроение, 1987.]. Недостатки оптико-электронных устройств: мал диапазон измеряемых углов ±20 уг. мин., большое рабочее расстояние 3÷6 м, что затрудняет контроль площадок, расположенных в труднодоступных местах объекта.
Наиболее близким по технической сущности к предлагаемому техническому решению является устройство, описанное в патенте [США №4378693].
Система для измерения наклона. Патент 4378693 США Заявл. 11.02.81 г. №233645. Опубл. 05.04.83. МКИ G01B 5/28.], состоит из двух идентичных измерительных каналов. Измерительный канал имеет измерительный преобразователь и систему преобразования выходных сигналов. Измерительные преобразователи устанавливаются на контролируемом объекте, продольные оси преобразователей располагаются взаимоперпендикулярно. Измерение взаимной ориентации установочных площадок относительно плоскости горизонта производится следующим образом: на первой площадке устанавливаются измерительные преобразователи, измеряются углы отклонения от горизонта относительно двух взаимоперпендикулярных осей, затем измерительные преобразователи устанавливаются на вторую площадку и повторяются измерения отклонения площадки от горизонта. По результатам измерений находятся углы рассогласования контролируемых площадок относительно горизонта.
Недостатком устройства-прототипа является то, что при больших углах азимутального рассогласования между базовыми осями координат контролируемых площадок и при колебаниях основания возникает динамическая погрешность, снижающая точность измерений.
Задачей создания изобретения является разработка устройство для измерения пространственных угловых отклонений, позволяющего получить технический результат, заключающийся в повышении точности измерения углового рассогласования и расширении функциональных возможностей: дополнительного измерения угла азимутального рассогласования.
Поставленная задача решается с помощью признаков указанных в формуле изобретения, общих с прототипом, таких как устройство, для измерения пространственных угловых отклонений, содержащее два измерительных канала, каждый из которых включает в себя измерительный преобразователь и систему съема и обработки информации, и отличительных существенных признаков, таких как измерительные преобразователи, установлены в двух идентичных измерительных головках (ИГ-1 и ИГ-2), каждая из которых содержит основание, с нанесенными реперными точками, корпус с которым через подшипники кинематически связана рамка с измерительным преобразователем, ось рамки направлена вдоль вертикальной оси (OZ1) измерительной головки, а ось чувствительности измерительного преобразователя расположена в горизонтальной плоскости, на одной из цапф рамки жестко закреплен ротор датчика момента, а статор датчика момента жестко связан с корпусом измерительной головки, другая цапфа рамки через муфту кинематически связана с осью датчика угла, который закреплен на корпусе, причем каждый измерительный канал состоит из блока обработки информации датчика наклона, блока обработки информации датчика угла, блока управления датчиком момента, при этом выход измерительного преобразователя электрически связан с первым входом блока обработки информации датчика наклона, выход которого через шину данных связан со входом персонального компьютера, выходы которого через шину команд электрически связаны: со вторым входом блока обработки информации датчика наклона, со вторым входом блока обработки информации датчика угла и входом блока управления датчиком момента, выход которого связан с ротором датчика момента, а выход датчика угла электрически связан с первым входом блока обработки информации датчика угла, выход которого через шину данных связан со входом персонального компьютера, один из выходов которого связан со вторым входом блока обработки информации датчика угла.
Вышеперечисленная совокупность существенных признаков позволяет получить следующий технический результат - устранение недостатков прототипа и повышение точности измерений углового рассогласования и расширении функциональных возможностей: дополнительного измерения угла азимутального рассогласования.
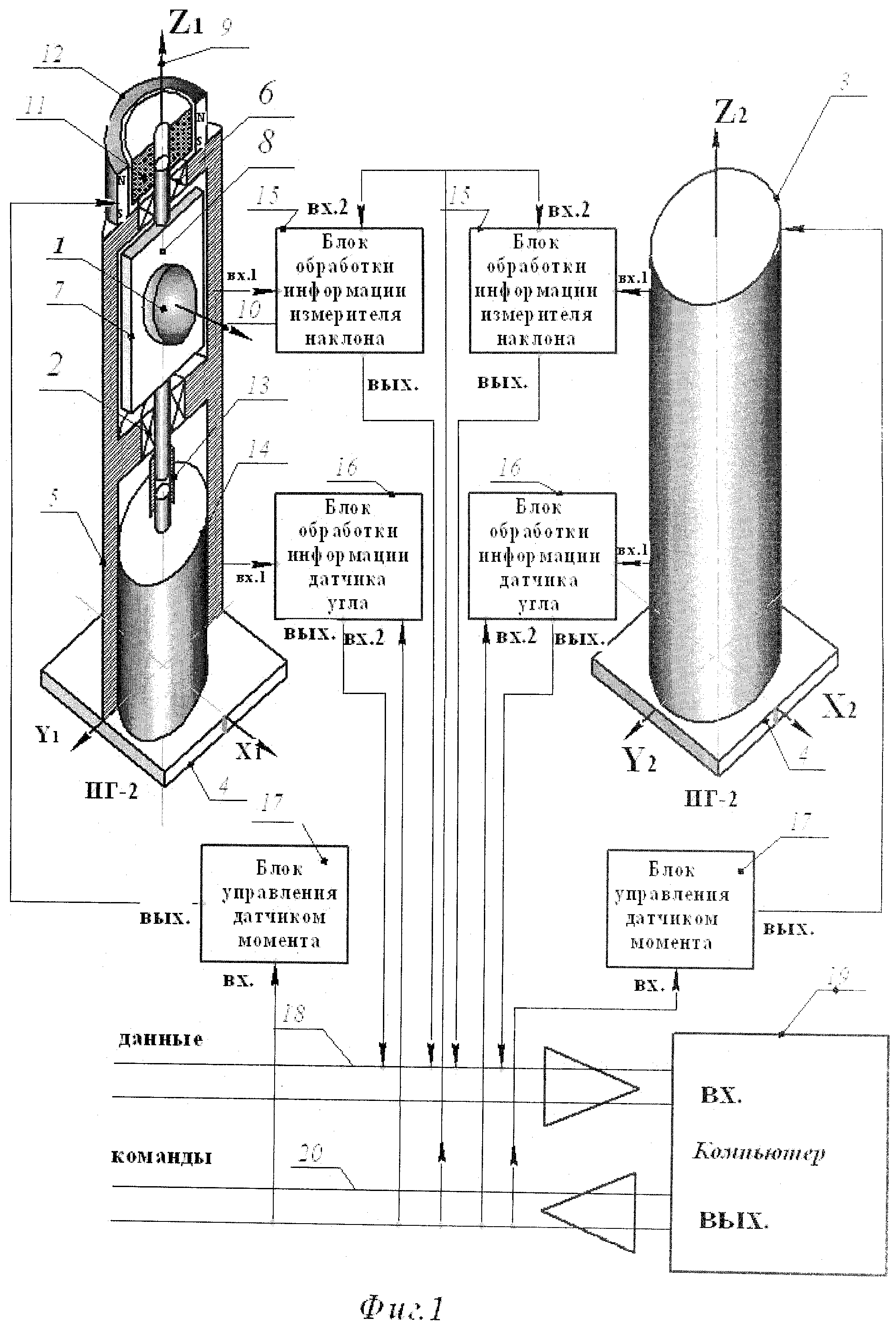
Сущность предлагаемого технического решения поясняется чертежами, где на фиг.1 показано устройство для измерения пространственных угловых отклонений, а на фиг.2 - расположение систем координат: XrOYrZr - связанная с изделием, X1OY1Z1 - связанная с базовыми осями первой контролируемой площадки, X2OY2Z2 - связанная с базовыми осями второй контролируемой площадки, ξ1OE1η1 - связанной с измерительным преобразователем первой измерительной головки (ИГ-1) и ξ2OE2η2 - связанной с измерительным преобразователем второй измерительной головки (ИГ-2). В качестве измерительных преобразователей могут быть использованы прецизионные акселерометры, например, струнный акселерометр или акселерометр по авторскому свидетельству СССР №517787. МКИ C01G 9/02.
Устройство для измерения пространственных угловых отклонений (фиг.1), содержит два измерительных канала, каждый из которых включает в себя измерительный преобразователь 1 и систему съема и обработки информации. Измерительные преобразователи 1 установлены в двух идентичных измерительных головках 2, 3 (ИГ-1 и ИГ-2), каждая из которых содержит основание 4, с нанесенными реперными точками, корпус 5 с которым через подшипники 6 кинематически связана рамка 7 с измерительным преобразователем 1, ось 8 рамки 7 направлена вдоль вертикальной оси 9 (OZ1) измерительной головки 2, а ось чувствительности 10 измерительного преобразователя 1 расположена в горизонтальной плоскости, на одной из цапф рамки 7 жестко закреплен ротор 11 датчика момента, а статор 12 датчика момента жестко связан с корпусом 5 измерительной головки 2, другая цапфа рамки 7 через муфту 13 кинематически связана с осью датчика угла 14, который закреплен на корпусе 5.
Каждый измерительный канал состоит из блока обработки информации датчика наклона 15, блока обработки информации датчика угла 16, блока управления датчиком момента 17, при этом выход измерительного преобразователя 1 электрически связан с первым входом блока обработки информации датчика наклона 15, выход которого через шину данных 18 связан со входом персонального компьютера 19, выходы которого через шину команд 20 электрически связаны: со вторым входом блока обработки информации датчика наклона 15, со вторым входом блока обработки информации датчика угла 16 и входом блока управления датчиком момента 17, выход которого связан с ротором 11 датчика момента, а выход датчика угла 14 электрически связан с первым входом блока обработки информации датчика угла 16, выход которого через шину данных 18 связан со входом персонального компьютера 19, один из выходов которого связан со вторым входом блока обработки информации датчика угла 16.
Устройство работает следующим образом: (фиг.1) измерительные ГОЛОВКИ ИГ-1 и ИГ-2 устанавливаются на контролируемые площадки, причем реперные точки, нанесенные на основания I, совмещаются для ИГ-1 с осью X1 первой площадки, а для ИГ-2 с осью X2 второй площадки. Из требований КД (чертежа изделия) определяется номинальный угол азимутального рассогласования А1, значение которого заносится в память персонального компьютера 19.
С выхода персонального компьютера 19 через шину команд 20 на вход блока управления датчика момента 17 измерительной головки ИГ-1 поступает команда "Старт", при этом с выхода блока управления датчиком момента 17 на обмотку ротора датчика момента 11 подается управляющее напряжение, рамка 7 начинает вращаться вокруг оси OZ1 одновременно с командой "Старт", поданной на вход блока управления датчиком момента 17, на второй вход блока обработки информации датчика угла 16 измерительной головки ИГ-1 поступает команда "Старт", при этом блок обработки информации датчика угла 15 начинает отсчет угла поворота рамки 7, с выхода блока обработки информации датчика угла 16 через шину данных 18 информация о величине угла поворота поступает на вход персонального компьютера 19, в персональном компьютере 19 величина измеренного утла поворота сравнивается с величиной номинального угла азимутального рассогласования ΔА, когда значение измеренного угла поворота станет равным ΔА, с выхода персонального компьютера через шину команд 20 на вход блока управления датчиком момента 17 измерительной головки ИГ-1 и второй вход блока обработки информации датчика угла 16 подается команда "Стоп", при этом движения рамки 7 прекращается, а с выхода блока обработки информации датчика угла 16 через шину данных 18 на вход персонального компьютера 19 поступает информация об измерительном угле разворота рамки 7 ΔА.
С выхода персонального компьютера 19 через шину команд 20 на вторые входы блоков обработки информации измерителя наклона 15 подается одновременно команда "Старт", при этом с выхода блоков обработки информации измерителя наклона 15 измерительных головок 2,3 (ИГ-1 и ИГ-2) через шину данных 18 поступает на вход персонального компьютера 19 информация об углах отклонения контролируемых площадок  и
и  . С выхода персонального компьютера 19 через шину команд 20 подается команда "Стоп" на вторые входы блоков обработки информации измерителя наклона 15. Измерение углов отклонения прекращается. Значения
. С выхода персонального компьютера 19 через шину команд 20 подается команда "Стоп" на вторые входы блоков обработки информации измерителя наклона 15. Измерение углов отклонения прекращается. Значения  и
и  записываются в память персонального компьютера 19. В память персонального компьютера заносится информация об угле поворота рамки 7: для ИГ-1 Ψmax1=ΔА+90°, для ИГ-2 Ψmax2=90°.
записываются в память персонального компьютера 19. В память персонального компьютера заносится информация об угле поворота рамки 7: для ИГ-1 Ψmax1=ΔА+90°, для ИГ-2 Ψmax2=90°.
С выхода персонального компьютера 19 через шину команд 20 одновременно подается команда "Старт" на вход блока управления датчика момента 17 и второй вход блока обработки информации датчика угла 16, с выхода блока управления датчиком момента 17 управляющее напряжение подается на ротор 11 датчика момента, с выхода блока обработки информации датчика угла 16 через шину данных 18 информация об угле разворота рамки 7 поступает на вход персонального компьютера 19, в персональном компьютере 19 происходит сравнение измеренного угла поворота рамки 7 Ψ1 с Ψmax1=ΔA*+30°, когда Ψ1=Ψmax2, с выхода персонального компьютера 19 через шину команд 20 подается команда "Стон" на вход блока управления датчиком момента 17 и на второй вход блока обработки информации датчика угла 16, вращение рамки 7 прекращается, с выхода блока обработки информации датчика утла 16 через шину данных 18 информация об угле поворота рамки 7 поступает на вход персонального компьютера 19. Разворот рамки 7 ИГ-2 на угол Ψ2=-90° производится аналогично. С выхода персонального компьютера 19 через шину команд 20 на второй вход блока обработки информации измерителя наклона канала измерения ИГ-1 и на второй вход блока обработки информации измерителя наклона канала измерения ИГ-2 подается одновременно команда "Старт", производится измерение углов отклонения от горизонта  и
и  , информация о которых с выходов блоков обработки информации датчиков наклона 15 через шину данных 20 подается на вход персонального компьютера 19, с выхода персонального компьютера 19 через шину команд 20 на входы 2 блоков обработки информации измерителя наклона 15 измерительных каналов ИГ-1 и ИГ-2 подается команда "Стоп", в память персонального компьютера 19 записываются величины
, информация о которых с выходов блоков обработки информации датчиков наклона 15 через шину данных 20 подается на вход персонального компьютера 19, с выхода персонального компьютера 19 через шину команд 20 на входы 2 блоков обработки информации измерителя наклона 15 измерительных каналов ИГ-1 и ИГ-2 подается команда "Стоп", в память персонального компьютера 19 записываются величины  и
и  . В персональный компьютер 19 вводятся величины Ψ1min=ΔA, Ψ2min=0 измерители наклона приводятся в первоначальное положение по схеме работы, приведенной выше. Изделие наклоняется вокруг горизонтальной оси на угол наклона φ3=5°. Углы отклонения площадок
. В персональный компьютер 19 вводятся величины Ψ1min=ΔA, Ψ2min=0 измерители наклона приводятся в первоначальное положение по схеме работы, приведенной выше. Изделие наклоняется вокруг горизонтальной оси на угол наклона φ3=5°. Углы отклонения площадок  ,
,  ,
,  ,
,  определяются по схеме работы, изложенной выше. По программе расчета, заложенной в персональном компьютере 19 с учетом величин
определяются по схеме работы, изложенной выше. По программе расчета, заложенной в персональном компьютере 19 с учетом величин  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , ΔA*, определяются углы рассогласования контролируемых площадок относительно горизонтальной плоскости Δφ, Δϑ и угол азимутального рассогласования
, ΔA*, определяются углы рассогласования контролируемых площадок относительно горизонтальной плоскости Δφ, Δϑ и угол азимутального рассогласования  . Для анализа работы системы и оценки точностных характеристик при низкочастотных колебаниях основания воспользуемся чертежами фиг.2, где: на фиг.2а показано расположение систем координат: XrOYrZr - связанной с изделием, X1OY1Z1 и X2OY2Z2 - связанные с контролируемыми площадками, ξ10η1λ1 и ξ20η2λ2 - связанные с измерительными преобразователями, при горизонтальном расположении осей изделия OXr и OYr, а на фиг.26: расположение систем коордипат при наклоне изделия вокруг оси ОУГ на угол φ3. На фиг, 2а А,
. Для анализа работы системы и оценки точностных характеристик при низкочастотных колебаниях основания воспользуемся чертежами фиг.2, где: на фиг.2а показано расположение систем координат: XrOYrZr - связанной с изделием, X1OY1Z1 и X2OY2Z2 - связанные с контролируемыми площадками, ξ10η1λ1 и ξ20η2λ2 - связанные с измерительными преобразователями, при горизонтальном расположении осей изделия OXr и OYr, а на фиг.26: расположение систем коордипат при наклоне изделия вокруг оси ОУГ на угол φ3. На фиг, 2а А,  ,
,  - угловые отклонения системы координат X1OY1Z1 относительно системы координат XrOYrZr,
- угловые отклонения системы координат X1OY1Z1 относительно системы координат XrOYrZr,  ,
,  , A2 - угловые отклонения системы координат X2OY2Z2 относительно системы координат XrOYrZr,
, A2 - угловые отклонения системы координат X2OY2Z2 относительно системы координат XrOYrZr,  ,
,  - угловые отклонения системы координат ξ10η1λ1 относительно системы координат XrOYrZr. ΔA - угол разворота оси чувствительности измерительного преобразователя головки ИГ-1 в плоскости X10Y1. Считая, что ускорение силы тяжести
- угловые отклонения системы координат ξ10η1λ1 относительно системы координат XrOYrZr. ΔA - угол разворота оси чувствительности измерительного преобразователя головки ИГ-1 в плоскости X10Y1. Считая, что ускорение силы тяжести  направлено в отрицательном направлении оси OZr, основание не совершает колебаний, определим ускорения, которые измеряют преобразователи измерительных головок ИГ-1 и ИГ-2 при расположении их вдоль осей 0η1, 0ξ1, 0η2, 0ξ2 Тогда: для ИГ-1
направлено в отрицательном направлении оси OZr, основание не совершает колебаний, определим ускорения, которые измеряют преобразователи измерительных головок ИГ-1 и ИГ-2 при расположении их вдоль осей 0η1, 0ξ1, 0η2, 0ξ2 Тогда: для ИГ-1

а для ИГ-2:

При отклонении изделия вокруг оси OYr на угол φ3, проекции ускорения на оси систем координат ξ10η1λ1 и ξ20η2λ2, запишутся в виде:




Величины  ,
,  ,
,  ,
,  могут быть представлены в виде:
могут быть представлены в виде:



С учетом малости φ3, а также выражений (7), (8) из уравнений (3), (4), (5), (6) получим:


Таким образом, предлагаемая измерительная система позволяет при наклоне изделия относительно горизонта определить угол азимутального рассогласования между базовыми осями двух контролируемых площадок. Углы отклонения от горизонта определяются из соотношений:


В реальных условиях контроля изделие может совершать низкочастотные колебания, обусловленные нестабильностью основания, которые приводят к динамической погрешности измерения углового рассогласования.
Пусть вдоль оси OYГ действует ускорение:

а вдоль оси OXГ действует ускорение:

где: ax, ay - амплитуды действующих ускорений,
w - частота колебаний,
νy, νx - начальные фазы,
t - время.
Оценим динамическую ошибку измерения углов отклонения первой контролируемой площадки от горизонта:
Принцип измеряемого преобразователем ускорения запишется в виде:


Представим:

Считая  и
и  малыми, подставив (17) в (15) и (16) с учетом
малыми, подставив (17) в (15) и (16) с учетом  ,
,
 получим:
получим:

Динамическая ошибка измерения угла  :
:

Для второй контролируемой площадки:


Динамическую погрешность определения утла азимутального рассогласования определим, записав проекции ускорений на оси Oξ1 и Oη1 с учетом (13), (14):

Для малых углов  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  и φ3 и с учетом малости динамической погрешности δAξ запишем выражения для динамической ошибки определения азимутального угла первой площадки:
и φ3 и с учетом малости динамической погрешности δAξ запишем выражения для динамической ошибки определения азимутального угла первой площадки:

Динамическая погрешность определения азимутального угла для второй контролируемой площадки:

Определим погрешность измерения разности горизонтальных углов с учетом (18)-(21):


Максимальные значения величин (25), (26):


Максимальное значение динамической ошибки разности азимутальных углов с учетом (23) и (24) запишется в виде:

Оценим величину динамических погрешностей измерения углов рассогласования при использовании системы измерения наклона [I].
При жестком закреплении преобразователей на основании угол ΔA в выражениях (27)-(29) равен нулю. Тогда при  , A1=0, A2=45°, φ3=5°.
, A1=0, A2=45°, φ3=5°.

При развороте платформы ИГ-1 с измерительным преобразователем на угол ΔА в азимутальной плоскости, значение угла А2 можно представить в виде:

где: ΔА - угол, равный номинальному значению угла азимутального рассогласования между осями 0XT и 0Y2 (взят из чертежа изделия);
δА - разностный угол, определяемый допусками на изготовление площадок.
Тогда с учетом малости  , получим:
, получим:


С учетом (31) и (32) выражения (27)-(29) примут вид:


Оценим динамическую ошибку с учетом  :
:


Следовательно, предлагаемое техническое решение позволяет снизить динамическую погрешность определения углов отклонения от горизонта в 200 раз и при наклоне изделия на малые углы позволяет определить угол азимутального рассогласования следующим образом
С учетом формул (9) и (10) находим:

Затем определяем угол азимутального рассогласования по формуле:

Углы ΔA*, Δφ u Δϑ позволяют определить ориентации базовой системы координат второй площадки X20Y2Z2 в системе координат первой площадки X10Y1Z1.
Следовательно, предлагаемое техническое решение позволяет снизить динамическую погрешность измерения пространственных углов отклонения и при наклоне изделия на малый угол определить дополнительно угол азимутального рассогласования.
Устройство для измерения пространственных угловых отклонений, содержащее два измерительных канала, каждый из которых включает в себя измерительный преобразователь и систему съема и обработки информации, отличающееся тем, что измерительные преобразователи установлены в двух идентичных измерительных головках (ИГ-1 и ИГ-2), каждая из которых содержит основание с нанесенными реперными точками, корпус, с которым через подшипники кинематически связана рамка с измерительным преобразователем, ось рамки направлена вдоль вертикальной оси (OZ) измерительной головки, а ось чувствительности измерительного преобразователя расположена в горизонтальной плоскости, на одной из цапф рамки жестко закреплен ротор датчика момента, а статор датчика момента жестко связан с корпусом измерительной головки, другая цапфа рамки через муфту кинематически связана с осью датчика угла, который закреплен на корпусе, причем каждый измерительный канал состоит из блока обработки информации датчика наклона, блока обработки информации датчика угла, блока управления датчиком момента, при этом выход измерительного преобразователя электрически связан с первым входом блока обработки информации датчика наклона, выход которого через шину данных связан со входом персонального компьютера, выходы которого через шину команд электрически связаны: со вторым входом блока обработки информации датчика наклона, со вторым входом блока обработки информации датчика угла и входом блока управления датчиком момента, выход которого связан с ротором датчика момента, а выход датчика угла электрически связан с первым входом блока обработки информации датчика угла, выход которого через шину данных связан со входом персонального компьютера, один из выходов которого связан со вторым входом блока обработки информации датчика угла.
Способ определения иммуномодуляторных свойств косметических средств
4-(4-бромфенил)-4-оксо-2-{[3-(этоксикарбонил)-4,5-диметилтиен-2-ил]амино}-2-бутеновая кислота, обладающая противовоспалительной и анальгетической активностью
Акселерометр гидростатический
Триалкоксисиланы, способ получения катодной обкладки на основе полиэтилендиокситиофена с силановым подслоем и оксидный конденсатор с такой катодной обкладкой
Способ получения иммобилизованного биокатализатора для синтеза водных растворов амидов
(z)-2-[(3-карбамоил-4,5,6,7-тетрагидробензо[b]тиен-2-ил)амино]-4-(4-r-фенил)-4-оксобут-2-еновые кислоты, обладающие анальгетической активностью
7-бензоил-8-гидрокси-6-фенил-9-(3-фенил-2-хиноксалинил)-10н-пиридо[1,2-a]хиноксалин-10-он, проявляющий анальгетическую активность
Способ молекулярно-генетической идентификации популяций древесных видов растений
Способ культивирования миобластов in vitro для получения биомассы миоцитов для пищевых целей
Способ измерения деформаций объектов из немагнитных материалов и установка для его осуществления
Диметил 4-ацил-1-гидрокси-3-метил-7-оксо-6-фенил-2,6-диазабицикло[3.2.1]окт-3-ен-5,8-дикарбоксилаты и способ их получения
N-арил-2,3-диароил-8,10-диметилпиридо[2',3':3,4]пиразоло[1,5-α]пиримидин-4-карбоксамиды и способ их получения
Способ получения дитритийдифторбензола источника фторированных нуклеогенных фенил-катионов
Способ определения координат манипулятором типа "пространственная мышь" и устройство для его осуществления
Способ определения иммуномодуляторных свойств косметических средств
1-арил-4-бензоил-3-гидрокси-5-метоксикарбонил-2,5-дигидро-1н-пиррол-2-оны, проявляющие анальгетическую активность, и способ их получения
3-(3,4-диметоксифенил)-4,5,6,7-тетрагидроиндазола гидрохлорид, анальгетическое и противомикробное средство
4-(4-бромфенил)-4-оксо-2-{[3-(этоксикарбонил)-4,5-диметилтиен-2-ил]амино}-2-бутеновая кислота, обладающая противовоспалительной и анальгетической активностью
Этил 5-алкил-7,7-диметил-2',9,11-триоксо-5'-фенил-1',2',5,6,7,8,9,11-октагидроспиро{индено[1,2-b]хинолин-10,3'-пиррол}-4'-карбоксилаты и способ их получения
3-ароил-4-гидрокси-1-(2-гидроксифенил)-5',5'-диметилдиспиро[2,5-дигидро-1н-азол-2,2'-(2',5',6',7'-тетрагидро-3'н-азоло [1,2-a]азол)7',1''-(1'',4''-дигидронафталин)]-3',4'',5-трионы и способ их получения

