Результат интеллектуальной деятельности: ЭЛЕКТРИЧЕСКИЙ ПРИВОД
Вид РИД
Изобретение
Предлагаемое изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов, исполнительных устройствах автоматических систем и др.
Известны электрические приводы, содержащие двигатель постоянного тока независимого возбуждения, якорная обмотка которого через датчик тока подключена в выходу усилителя мощности, а обмотка возбуждения подключена к источнику постоянного тока, датчик скорости, механически соединенный с ротором двигателя и подключенный выходом к вычитающему входу элемента сравнения, суммирующий вход которого подключен к задатчику скорости, а выход через регулятор скорости соединен с суммирующим входом регулятора тока, вычитающий вход которого соединен с выходом датчика тока, выход соединен с входом усилителя мощности (Перельмутер В.М., Сидоренко В.А. Системы управления тиристорными электроприводами постоянного тока. - М.: Энергоатомиздат, 1988; патент РФ №2254665, МПК Н02Р 5/06. - Опубл. 20.06.2005, бюл. №17).
Известные электрические приводы реализованы по классическому принципу подчиненного регулирования координат с внутренним подчиненным контуром регулирования тока. В таких системах при простой технической реализации достигаются высокое качество регулирования скорости и ограничение тока в переходных режимах. Однако потери энергии в якорной обмотке, магнитопроводе, щеточном контакте и подшипниках в известных электроприводах не контролируются и в переходных режимах могут достигать больших значений, что снижает энергетическую эффективность работы двигателей.
Следовательно, недостатком известных электрических приводов является низкая энергетическая эффективность работы двигателей.
Из известных технических решений наиболее близким по достигаемому результату к предлагаемому изобретению является электрический привод, содержащий двигатель постоянного тока независимого возбуждения, якорная обмотка которого через датчик тока подключена в выходу усилителя мощности, а обмотка возбуждения подключена к источнику постоянного тока, датчик скорости, механически соединенный с ротором двигателя и подключенный выходом к вычитающему входу элемента сравнения, суммирующий вход которого подключен к задатчику скорости, а выход через регулятор скорости соединен с суммирующим входом регулятора тока, выход которого соединен с входом усилителя мощности, пороговый элемент с характеристикой
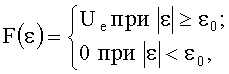
где Ue - напряжение, соответствующее уровню логической единицы, вход которого подключен к выходу элемента сравнения, и нелинейный элемент с характеристикой F(x)=x2signx, подключенный к выходу датчика тока, и блок перемножения, первый и второй входы которого подключены к выходам соответственно порогового элемента непосредственно и нелинейного элемента с характеристикой F(x)=x2signx через усредняющий фильтр, а выход подключен к вычитающему входу регулятора тока, выход которого соединен с входом усилителя мощности (патент РФ №2068614, МПК Н02Р 5/06, 1996).
Такой известный электрический привод реализован по классическому принципу подчиненного регулирования координат с внутренним подчиненным контуром регулирования тока и дополнительной внутренней обратной связью по мощности потерь в якорной обмотке, которая пропорциональна квадрату тока якорной обмотки.
В известной системе при простой технической реализации достигаются высокое качество регулирования скорости, ограничение тока в переходных режимах и минимизация потерь в якорной обмотке (потерь в меди). Однако потери энергии в других элементах двигателя (магнитопроводе, щеточном контакте и подшипниках) не контролируются и в переходных режимах могут достигать больших значений, что снижает энергетическую эффективность работы двигателей.
Следовательно, недостатком известного электрического привода является низкая энергетическая эффективность работы.
Целью предлагаемого изобретения является повышение энергетической эффективности работы электрического привода путем увеличения точности учета потерь в двигателе при регулировании скорости.
Поставленная цель достигается тем, что в известный электрический привод, содержащий двигатель постоянного тока независимого возбуждения, якорная обмотка которого через датчик тока подключена к выходу усилителя мощности, а обмотка возбуждения подключена к источнику постоянного тока, датчик скорости, механически соединенный с ротором двигателя и подключенный выходом к вычитающему входу элемента сравнения, суммирующий вход которого подключен к задатчику скорости, а выход через регулятор скорости соединен с суммирующим входом регулятора тока, выход которого соединен с входом усилителя мощности, пороговый элемент с характеристикой 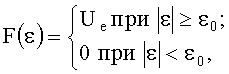 где Ue - напряжение, соответствующее уровню логической единицы, вход которого подключен к выходу элемента сравнения, и нелинейный элемент с характеристикой F(x)=x2signx, подключенный к выходу датчика тока, и блок перемножения, дополнительно введены второй нелинейный элемент с характеристикой F(x)=x2signx, коммутатор, блок выделения модуля и сумматор, входы которого подключены к выходам соответственно первого нелинейного элемента, датчика тока, блока перемножения, второго нелинейного элемента и датчика скорости, первый вход блока перемножения подключен к выходу датчика тока, второй вход блока перемножения соединен через блок выделения модуля с выходом датчика скорости, вход второго нелинейного элемента подключен к выходу датчика скорости, первый и второй информационные входы коммутатора подключены к выходам соответственно датчика тока и сумматора, управляющий вход соединен с выходом порогового элемента, а выход подключен к вычитающему входу регулятора скорости.
где Ue - напряжение, соответствующее уровню логической единицы, вход которого подключен к выходу элемента сравнения, и нелинейный элемент с характеристикой F(x)=x2signx, подключенный к выходу датчика тока, и блок перемножения, дополнительно введены второй нелинейный элемент с характеристикой F(x)=x2signx, коммутатор, блок выделения модуля и сумматор, входы которого подключены к выходам соответственно первого нелинейного элемента, датчика тока, блока перемножения, второго нелинейного элемента и датчика скорости, первый вход блока перемножения подключен к выходу датчика тока, второй вход блока перемножения соединен через блок выделения модуля с выходом датчика скорости, вход второго нелинейного элемента подключен к выходу датчика скорости, первый и второй информационные входы коммутатора подключены к выходам соответственно датчика тока и сумматора, управляющий вход соединен с выходом порогового элемента, а выход подключен к вычитающему входу регулятора скорости.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые признаки:
- второй нелинейный элемент с характеристикой F(x)=x2signx;
- коммутатор;
- блок выделения модуля;
- сумматор.
При этом входы сумматора подключены к выходам соответственно первого нелинейного элемента, датчика тока, блока перемножения, второго нелинейного элемента и датчика скорости, первый вход блока перемножения подключен к выходу датчика тока, второй вход блока перемножения соединен через блок выделения модуля с выходом датчика скорости, вход второго нелинейного элемента подключен к выходу датчика скорости, первый и второй информационные входы коммутатора подключены к выходам соответственно датчика тока и сумматора, управляющий вход соединен с выходом порогового элемента, а выход подключен к вычитающему входу регулятора скорости.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения обеспечивается повышение энергетической эффективности работы электрического привода. Это обусловлено действием в переходных режимах работы электрического привода внутренней обратной связи по мощности суммарных потерь в якорной обмотке, магнитопроводе, щеточном контакте и подшипниках. Таким образом, в предлагаемом электрическом приводе в установившемся режиме действуют обратная связь по скорости и внутренняя обратная связь по току. При переходных процессах, когда ошибка регулирования превышает по модулю пороговое значение, в электрическом приводе действует дополнительная обратная связь по мощности суммарных потерь (в якорной обмотке, магнитопроводе, щеточном контакте, подшипниках, а также добавочных потерь), обеспечивающая минимизацию потерь.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, автоматики и электропривода.
Известны нелинейные элементы с характеристикой F(x)=x2signx в электрическом приводе постоянного тока (патент РФ №2068614, МПК Н02Р 5/06, 1996). Указанный элемент используется в известном устройстве для формирования сигнала обратной связи по мощности потерь в якорной обмотке. В предлагаемом техническом решении второй нелинейный элемент с характеристикой F(x)=x2signx используется для формирования сигнала, пропорционального квадрату скорости, в составе отрицательной обратной связи по мощности потерь в магнитопроводе, т.е. по новому назначению.
Известны коммутаторы в электрических приводах, предназначенные для переключения сигналов обратных связей (патент РФ №2001498, МПК 5/06, 1993 г.). В предлагаемом техническом решении коммутатор выполняет подключение к вычитающему входу регулятора тока в зависимости от абсолютного значения сигнала рассогласования одного сигналов: пропорционального току или пропорционального суммарной мощности потерь, т.е. по новому назначению.
Известны блоки выделения модуля в электрических приводах, предназначенные для выделения модуля из сигнала тахогенератора при реверсировании (Перельмутер В.М., Сидоренко В.А. Системы управления тиристорными электроприводами постоянного тока. - М., Энергоатомиздат, 1988, с.202-203, рис.6.14). В известном электрическом приводе выделение модуля из сигнала, пропорционального скорости, используется для формирования сигнала обратной связи в реверсивном приводе. В предлагаемом техническом решении выходной сигнал блока выделения модуля используется для вычисления мощности добавочных потерь.
Известны сумматоры в электрических приводах (Перельмутер В.М., Сидоренко В.А. Системы управления тиристорными электроприводами постоянного тока. - М., Энергоатомиздат, 1988, с.129-133), выполняющие алгебраическое суммирование различных сигналов. В предлагаемом устройстве и известных технических решениях сумматоры выполняют аналогичные функции.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого изобретения поясняется чертежом (фиг.1). Электрический привод, функциональная схема которого показана на чертеже (фиг.1), содержит регулятор тока 1, коммутатор 2, сумматор 3, усилитель мощности 4, первый 5 и второй 6 нелинейные элементы с характеристикой F(x)=x2signx, регулятор скорости 7, датчик тока 8, блок перемножения 9, пороговый элемент с характеристикой 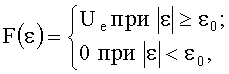 где Ue - напряжение, соответствующее уровню логической единицы, двигатель постоянного тока с якорной обмоткой 11 и обмоткой возбуждения 12, источник постоянного тока 13, блок выделения модуля 14, датчик скорости 15, элемент сравнения 16 и задатчик скорости 17. Якорная обмотка 11 двигателя постоянного тока через датчик тока 8 подключена к выходу усилителя мощности 4, а обмотка возбуждения 12 подключена к источнику постоянного тока, датчик скорости 15, механически соединенный с ротором двигателя, подключен выходом к вычитающему входу элемента сравнения 16, суммирующий вход которого подключен к задатчику скорости 17, а выход через регулятор скорости 7 соединен с суммирующим входом регулятора тока 1, выход которого соединен с входом усилителя мощности 4, пороговый элемент 10 с характеристикой
где Ue - напряжение, соответствующее уровню логической единицы, двигатель постоянного тока с якорной обмоткой 11 и обмоткой возбуждения 12, источник постоянного тока 13, блок выделения модуля 14, датчик скорости 15, элемент сравнения 16 и задатчик скорости 17. Якорная обмотка 11 двигателя постоянного тока через датчик тока 8 подключена к выходу усилителя мощности 4, а обмотка возбуждения 12 подключена к источнику постоянного тока, датчик скорости 15, механически соединенный с ротором двигателя, подключен выходом к вычитающему входу элемента сравнения 16, суммирующий вход которого подключен к задатчику скорости 17, а выход через регулятор скорости 7 соединен с суммирующим входом регулятора тока 1, выход которого соединен с входом усилителя мощности 4, пороговый элемент 10 с характеристикой 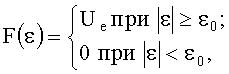 где Ue - напряжение, соответствующее уровню логической единицы, подключен входом к выходу элемента сравнения 16, а выходом - к управляющему входу коммутатора 2, первый и второй информационные входы которого подключены к выходам соответственно датчика тока и 8 и сумматора 3, а выход соединен с суммирующим входом регулятора тока 1, первый нелинейный элемент 5 с характеристикой F(x)=x2signx включен между выходом датчика тока 8 и первым входом сумматора 3, второй вход которого подключен к выходу датчика тока 8, первый вход блока перемножения 9 подключен к выходу датчика тока 8, второй вход блока перемножения 9 через блок выделения модуля 14 соединен с выходом датчика скорости 15, а выход блока перемножения 9 соединен с третьим входом сумматора 3, второй нелинейный элемент 6 с характеристикой F(x)=x2signx включен между выходом датчика скорости 15 и четвертым входом сумматора 3, пятый вход которого соединен с выходом датчика скорости 15.
где Ue - напряжение, соответствующее уровню логической единицы, подключен входом к выходу элемента сравнения 16, а выходом - к управляющему входу коммутатора 2, первый и второй информационные входы которого подключены к выходам соответственно датчика тока и 8 и сумматора 3, а выход соединен с суммирующим входом регулятора тока 1, первый нелинейный элемент 5 с характеристикой F(x)=x2signx включен между выходом датчика тока 8 и первым входом сумматора 3, второй вход которого подключен к выходу датчика тока 8, первый вход блока перемножения 9 подключен к выходу датчика тока 8, второй вход блока перемножения 9 через блок выделения модуля 14 соединен с выходом датчика скорости 15, а выход блока перемножения 9 соединен с третьим входом сумматора 3, второй нелинейный элемент 6 с характеристикой F(x)=x2signx включен между выходом датчика скорости 15 и четвертым входом сумматора 3, пятый вход которого соединен с выходом датчика скорости 15.
Электрический привод работает следующим образом. Обмотка возбуждения 12 электрического двигателя постоянного тока подключена к выходу источника постоянного тока 13. Регулирование скорости Ω двигателя осуществляется изменением напряжения на якорной обмотке 11 двигателя с помощью усилителя мощности 4. Для измерения угловой скорости ротора электрического двигателя используется датчик скорости 15, преобразующий угловую скорость ротора в сигнал, пропорциональный скорости. Ток в якорной обмотке двигателя 10 измеряются с помощью датчиков тока 8, например, шунта.
На суммирующий вход элемента сравнения 15 с выхода задатчика скорости 17 поступает сигнал u17, пропорциональный требуемому значению угловой скорости двигателя. На вычитающий вход элемента сравнения 16 поступает выходной сигнал u15 датчика скорости 15, пропорциональный угловой скорости Ω вращения ротора электрического двигателя. Сигнал с выхода элемента сравнения 16 поступает на вход регулятора скорости 7. В регуляторе скорости 7 производится вычисление ошибки регулирования ε=u17-u16 и преобразование полученного сигнала в соответствии с реализованным в устройстве законом регулирования, например, пропорционально-интегральным. Сигнал ε с выхода регулятора скорости 2 поступает на суммирующий вход регулятора тока 1 и вход порогового элемента 10 с характеристикой 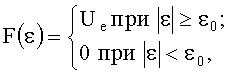 . На выходе порогового элемента 10 формируется логический сигнал, управляющий переключением коммутатора 2. При
. На выходе порогового элемента 10 формируется логический сигнал, управляющий переключением коммутатора 2. При  переключающий элемент коммутатора 2 находится в положении «а». При этом вычитающий вход регулятора тока подключен к выходу датчика тока 8. При
переключающий элемент коммутатора 2 находится в положении «а». При этом вычитающий вход регулятора тока подключен к выходу датчика тока 8. При  переключающий элемент коммутатора 2 находится в положении «б». При этом вычитающий вход регулятора тока подключен к выходу сумматора 3.
переключающий элемент коммутатора 2 находится в положении «б». При этом вычитающий вход регулятора тока подключен к выходу сумматора 3.
Регулятор тока 1 выполняет сравнение сигнала, поступающего с выхода регулятора скорости 2, с выходным сигналом коммутатора 2, и формирование сигнала для усилителя мощности 4.
Сумматор 3 выполняет вычисление суммы сигналов, поступающих с выходов первого нелинейного элемента 5 с характеристикой F(x)=x2signx, датчика тока 8, блока перемножения 9, второго нелинейного элемента 6 с характеристикой F(x)=x2signx, и датчика скорости 15. На выходе сумматора 3 при этом формируется сигнал

где k1, k2, k3, k4, k5 - коэффициенты пропорциональности.
Известно (Кацман М.М. Расчет и конструирование электрических машин. - М., Энергоатомиздат, 1984. - 360 с.), что потери в двигателе (без учета потерь на возбуждения, которые можно считать постоянными при стабилизации тока возбуждения) определяются суммой

где Рст - потери в стали;

k - коэффициент возрастания потерь (k≈2…2,5) вследствие различных дополнительных факторов;
Р1,0г, Р1,0в - характерные для шихтованных сердечников удельные потери на гистерезис и удельные потери на вихревые токи при частоте f=50 Гц и 1 Тл;
f - частота;
В - максимальная индукция, Тл;
mст - масса стали, кг;
Рщ=9,81vкAкpkт - потери на трение щеток;
νк - окружная скорость коллектора;
Ак - площадь трущихся поверхностей щеток;
р - давление пружины;
kт - коэффициент трения;
Рк=ΔUкIя - потери в щеточном контакте;
ΔUк - падение напряжения на щетках;
Ртр.в - потери на трение в подшипниках и вентиляционные потери;
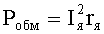 - потери в основной токовой цепи;
- потери в основной токовой цепи;
Рдоб=kдР - добавочные потери;
kд - коэффициент добавочных потерь; kд=(0,005…0,01);
Р - мощность двигателя.
Эмпирические коэффициенты, характеризующие отдельные составляющие потерь, приведены в справочной литературе (например: Кацман М.М. Расчет и конструирование электрических машин. - М., Энергоатомиздат, 1984. - 360 с.; Морозов А.Г. Расчет электрических машин постоянного тока. - М., Высшая школа, 1972. - 224 с.).
Учитывая, что частота магнитного поля равна
 ,
,
где рn - число пар полюсов двигателя;
окружная скорость коллектора
νк=ΩRк,
где Rк - радиус коллектора;
мощность двигателя приближенно определяется по формуле
Р=МΩ=ciΩ,
где с - конструктивная постоянная двигателя,
суммарные потери в двигателе можно представить в виде выражения
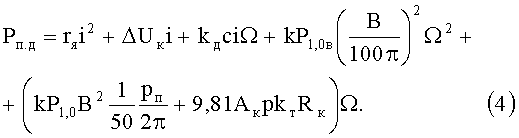
Выполнив сравнение выражений (1) и (4), получаем соотношения для коэффициентов:
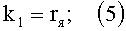


Таким образом, если коэффициенты датчиков и сумматора 3 выбраны в соответствии с уравнениями (5)…(9), то сигнал обратной связи на выходе сумматора 3 пропорционален суммарной мощности потерь в двигателе 11.
Использование в блоках 5 и 6 функционального преобразования типа «signx» и блока выделения модуля 14 обеспечивает сохранение отрицательного знака обратной связи при реверсировании электрического привода.
Сигнал с выхода сумматора 3 поступает на второй вход коммутатора 2, на первом входе которого действует выходной сигнал датчика тока 8. Если ошибка по скорости не превышает заданной величины ε0, т.е.  , переключающий элемент коммутатора 2 находится в положении «а». При этом вычитающий вход регулятора тока подключен к выходу датчика тока 8. В подчиненном контуре системы действует отрицательная обратная связь по току. При использовании ПИ-регуляторов скорости 7 и тока 1 система является астатической по задающему воздействию и по нагрузке. Следовательно, в электрическом приводе обеспечивается высокая точность регулирования скорости в установившемся режиме и высокие показатели качества процессов регулирования при малых отклонениях скорости.
, переключающий элемент коммутатора 2 находится в положении «а». При этом вычитающий вход регулятора тока подключен к выходу датчика тока 8. В подчиненном контуре системы действует отрицательная обратная связь по току. При использовании ПИ-регуляторов скорости 7 и тока 1 система является астатической по задающему воздействию и по нагрузке. Следовательно, в электрическом приводе обеспечивается высокая точность регулирования скорости в установившемся режиме и высокие показатели качества процессов регулирования при малых отклонениях скорости.
В динамических режимах при изменениях сигнала задания или механической нагрузки происходит изменение ошибки регулирования ε. При  переключающий элемент коммутатора 2 находится в положении «б».
переключающий элемент коммутатора 2 находится в положении «б».
При этом вычитающий вход регулятора тока 1 подключен к выходу сумматора 3. В результате этого в электрическом приводе действует внутренняя отрицательная обратная связь по мощности потерь, благодаря которой происходит минимизация суммарных потерь в двигателе 11 при переходных режимах.
Таким образом, предлагаемый электрический привод содержит два контура регулирования: главный контур, образованный регулятором скорости 7, и внутренний подчиненный переключаемый контур, включающий регулятор тока 1. В установившихся режимах (при малых значениях ошибки регулирования скорости) в подчиненном контуре электропривода действует отрицательная обратная связь по току, обеспечивающая высокие точность и динамические показатели качества регулирования. В динамических режимах (при больших значениях ошибки регулирования скорости) в электрическом приводе действует внутренняя отрицательная обратная связь по мощности суммарных потерь, которая обеспечивает минимизацию потерь в двигателе.
Таким образом, использование в известном электрическом приводе, содержащем двигатель постоянного тока независимого возбуждения, якорная обмотка которого через датчик тока подключена в выходу усилителя мощности, а обмотка возбуждения подключена к источнику постоянного тока, датчик скорости, механически соединенный с ротором двигателя и подключенный выходом к вычитающему входу элемента сравнения, суммирующий вход которого подключен к задатчику скорости, а выход через регулятор скорости соединен с суммирующим входом регулятора тока, выход которого соединен с входом усилителя мощности, пороговый элемент с характеристикой  где Ue - напряжение, соответствующее уровню логической единицы, вход которого подключен к выходу элемента сравнения, и нелинейный элемент с характеристикой F(x)=x2signx, подключенный к выходу датчика тока, и блок перемножения, дополнительно второго нелинейного элемента с характеристикой F(x)=x2signx, коммутатора, блока выделения модуля и сумматора, входы которого подключены к выходам соответственно первого нелинейного элемента, датчика тока, блока перемножения, второго нелинейного элемента и датчика скорости, первый вход блока перемножения подключен к выходу датчика тока, второй вход блока перемножения соединен через блок выделения модуля с выходом датчика скорости, вход второго нелинейного элемента подключен к выходу датчика скорости, первый и второй информационные входы коммутатора подключены к выходам соответственно датчика тока и сумматора, управляющий вход соединен с выходом порогового элемента, а выход подключен к вычитающему входу регулятора скорости, обеспечивает повышение энергетической эффективности работы электрического привода за счет увеличения точности учета потерь в двигателе.
где Ue - напряжение, соответствующее уровню логической единицы, вход которого подключен к выходу элемента сравнения, и нелинейный элемент с характеристикой F(x)=x2signx, подключенный к выходу датчика тока, и блок перемножения, дополнительно второго нелинейного элемента с характеристикой F(x)=x2signx, коммутатора, блока выделения модуля и сумматора, входы которого подключены к выходам соответственно первого нелинейного элемента, датчика тока, блока перемножения, второго нелинейного элемента и датчика скорости, первый вход блока перемножения подключен к выходу датчика тока, второй вход блока перемножения соединен через блок выделения модуля с выходом датчика скорости, вход второго нелинейного элемента подключен к выходу датчика скорости, первый и второй информационные входы коммутатора подключены к выходам соответственно датчика тока и сумматора, управляющий вход соединен с выходом порогового элемента, а выход подключен к вычитающему входу регулятора скорости, обеспечивает повышение энергетической эффективности работы электрического привода за счет увеличения точности учета потерь в двигателе.
Использование предлагаемого устройства в различных промышленных системах позволит улучшить технические характеристики оборудования, оснащенного электроприводами постоянного тока.
Электрический привод, содержащий двигатель постоянного тока независимого возбуждения, якорная обмотка которого через датчик тока подключена в выходу усилителя мощности, а обмотка возбуждения подключена к источнику постоянного тока, датчик скорости, механически соединенный с ротором двигателя и подключенный выходом к вычитающему входу элемента сравнения, суммирующий вход которого подключен к задатчику скорости, а выход через регулятор скорости соединен с суммирующим входом регулятора тока, выход которого соединен с входом усилителя мощности, пороговый элемент с характеристикой где U - напряжение, соответствующее уровню логической единицы,вход которого подключен к выходу элемента сравнения, и нелинейный элемент с характеристикой F(x)=xsignx, подключенный к выходу датчика тока, и блок перемножения, отличающийся тем, что дополнительно введены второй нелинейный элемент с характеристикой F(x)=xsignx, коммутатор, блок выделения модуля и сумматор, входы которого подключены к выходам соответственно первого нелинейного элемента, датчика тока, блока перемножения, второго нелинейного элемента и датчика скорости, первый вход блока перемножения подключен к выходу датчика тока, второй вход блока перемножения соединен через блок выделения модуля с выходом датчика скорости, вход второго нелинейного элемента подключен к выходу датчика скорости, первый и второй информационные входы коммутатора подключены к выходам соответственно датчика тока и сумматора, управляющий вход соединен с выходом порогового элемента, а выход подключен к вычитающему входу регулятора скорости.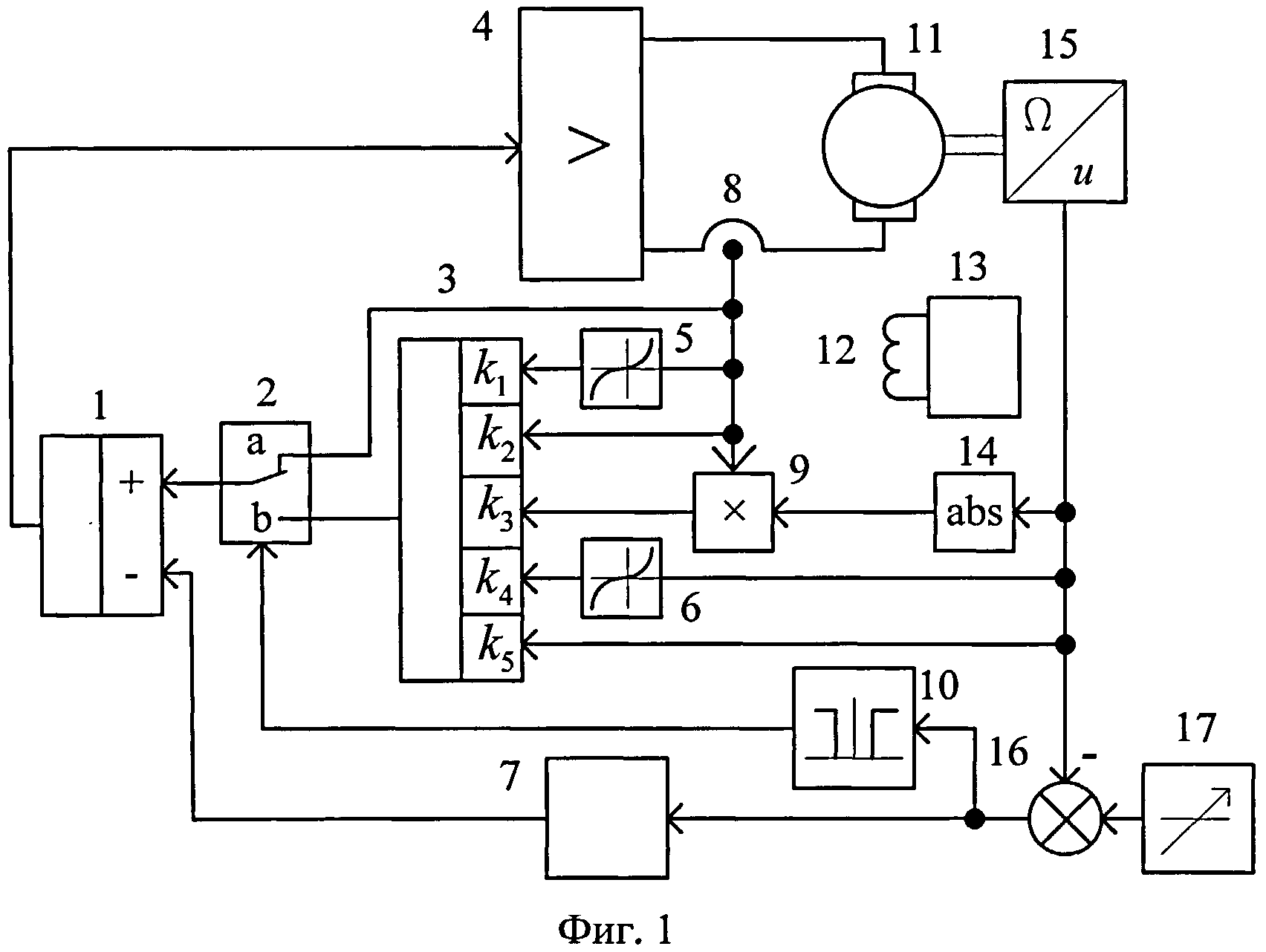
Способ идентификации параметров линии электропередачи, питающей экскаватор
Способ контроля ресурса изоляции силового трансформатора
Стенд для испытания электрических машин в динамическом режиме
Теплоэлектростанция
Регулирующее устройство
Способ компенсации потери напряжения в питающей электрической сети
Способ работы пропорционально-интегрального регулятора
Способ контроля сопротивления изоляции и защитного отключения электрической сети
Способ контроля сопротивления изоляции в электрической сети с изолированной нейтралью
Устройство для вычисления функциональных зависимостей
Магнезиальное вяжущее на основе отходов доломитового и пеностекольного производства
Способ получения покрытия из микроструктурированного карбида титана на поверхности изделия из титана или титанового сплава с использованием лазерного излучения
Способ работы захвата манипулятора и устройство для его осуществления
Тяжелый бетон с использованием доломитовых отходов
Замок с тепловым расцеплением
Способ шлифования
Способ регулирования движения транспортных средств на перекрестке транспортных магистралей
Способ гибкого ленточного шлифования
Комбинированный виброустойчивый инструмент

