Результат интеллектуальной деятельности: РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО
Вид РИД
Изобретение
Изобретение относится к автоматическому регулированию и предназначено для использования в различных системах автоматики.
Известны регулирующие устройства, содержащие интегратор и усилитель, подключенные к входам сумматора, выход которого соединен с вторым усилителем, и нормально разомкнутый управляемый ключ (Денисенко В.В. ПИД-регуляторы: вопросы реализации / Современные технологии автоматизации, 2007, №4. - С. 86-97, рис. 6; Гельднер К., Кубик С. Нелинейные системы управления. - М: Мир, 1987, с. 265-266, рис. 164).
В известных устройствах обеспечивается формирование регулирующего воздействия для объекта, пропорциональное сумме входного сигнала рассогласования системы и интеграла от него:
 ,
,
где kп - коэффициент пропорциональности; Tи - постоянная времени, при ограничении выходного сигнала интегратора для обеспечения устойчивости и снижения колебаний в системе.
При использовании таких устройств обеспечивается быстрая реакция системы на изменения рассогласования за счет постоянной составляющей, высокая точность регулирования в установившихся режимах, обеспечиваемая интегральной составляющей, и ограничение выходного сигнала интегратора. Однако при управлении инерционными объектами при больших нагрузках известные устройства не обеспечивают высокое качество регулирования, что проявляется в появлении статической ошибки в системе. При ограничении выходного сигнала интегратора, предусмотренного для снижения колебаний и обеспечения устойчивости, изменение сигнала ошибки не приводит к изменению выходного сигнала интегратора и, следовательно, не происходит астатическое регулирование. В результате этого в системе имеет место статическая ошибка. Таким образом, недостаток известных регулирующих устройств - низкое качество регулирования при больших нагрузках.
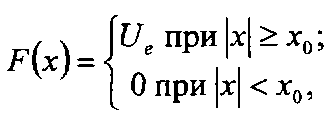
Из известных устройств наиболее близким по достигаемому результату к предлагаемому техническому решению является регулирующее устройство, содержащее интегратор, суммирующий вход которого объединен с входами сумматора и нелинейного функционального элемента с характеристикой
где x - входной сигнал устройства; Ue - напряжение, соответствующее уровню логической единицы; x0 - пороговое значение,
усилитель, подключенный к выходу сумматора, и нормально разомкнутый управляемый ключ, присоединенный между выходом и управляющим входом интегратора, управляющий вход ключа соединен с выходом нелинейного функционального элемента (Патент РФ №2103715, МПК G05B 11/36, опубл. 27.01.1998).
При использовании известного устройства обеспечивается быстрая реакция системы на изменения рассогласования за счет постоянной составляющей, высокая точность регулирования в установившихся режимах, обеспечиваемая интегральной составляющей, и ограничение действия интегратора при больших ошибках в системе. Однако при управлении инерционными объектами при больших нагрузках известное устройство не обеспечивает высокое качество регулирования, что проявляется в появлении статической ошибки в системе в результате ограничения действия интегратора. При ограничении действия интегратора, предусмотренного для снижения колебаний и обеспечения устойчивости, регулирование является статическим, т.е. устранения статической ошибки не происходит. Таким образом, недостаток известных регулирующих устройств - низкое качество регулирования при больших нагрузках.
Таким образом, недостаток известного устройства - низкое качество регулирования при больших нагрузках.
Цель изобретения - повышение качества регулирования путем увеличения точности при больших нагрузках.
Поставленная цель достигается тем, что в известное регулирующее устройство, содержащее интегратор, суммирующий вход которого объединен с входами сумматора и нелинейного функционального элемента с характеристикой
где x - входной сигнал устройства; Ue - напряжение, соответствующее уровню логической единицы; x0 - пороговое значение,
усилитель, подключенный к выходу сумматора, и нормально разомкнутый управляемый ключ, присоединенный между выходом и вычитающим входом интегратора, управляющий вход ключа соединен с выходом нелинейного функционального элемента, дополнительно введены второй интегратор и нормально замкнутый управляемый ключ, присоединенный между вычитающим входом и выходом второго интегратора, вход которого объединен с входом первого интегратора, а выход подключен к входу сумматора, управляющий вход нормально замкнутого управляемого ключа соединен с выходом нелинейного функционального элемента, при этом второй интегратор имеет большую постоянную времени, чем первый.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое регулирующее устройство имеет следующие отличительные признаки (новые операции):
- второй интегратор;
- нормально замкнутый управляемый ключ;
- второй интегратор имеет большую постоянную времени, чем первый.
Следовательно, заявляемое регулирующее устройство соответствует требованию «новизна».
По каждому отличительному существенному признаку проведен поиск известных технических решений в области автоматического управления.
Операции, состоящие в том, что определяют абсолютное значение входного сигнала, сравнивают абсолютное значение входного сигнала с пороговым уровнем и интегрируют разность входного сигнала и сигнала, пропорционального результату интегрирования, в известных технических решениях не обнаружены.
Следовательно, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого технического решения заключается в следующем. В установившемся режиме при малой ошибке системы регулирующее воздействие на выходе устройства формируется пропорционально сумме входного сигнала, интеграла от него (на выходе первого интегратора) и выходного сигнала второго интегратора, охваченного отрицательной обратной связью (интегро-дифференцирующего корректирующего устройства). При большом рассогласовании в системе, например, при изменении сигнала задания или возмущения, регулирующее воздействие формируется как сумма входного сигнала и выходного сигнала первого интегратора, охваченного отрицательной обратной связью (интегро-дифференцирующего корректирующего устройства) и выходного сигнала второго интегратора с малым коэффициентом передачи. При этом вследствие малого коэффициента передачи второго интегратора в течение переходного процесса его выходной сигнал изменяется значительно меньше, чем выходной сигнал первого интегратора и сигнал ошибки. Но при длительном действии больших нагрузок статическая ошибка интегрируется вторым интегратором и всегда обеспечивает переключение нелинейного функционального элемента и переход системы в режим отработки малой ошибки. В результате обеспечивается высокая точность автоматической системы в установившихся режимах и высокое качество регулирования при переходных процессах.
Следовательно, изобретение соответствует требованию «положительный эффект».
Сущность предлагаемого технического решения поясняется чертежами.
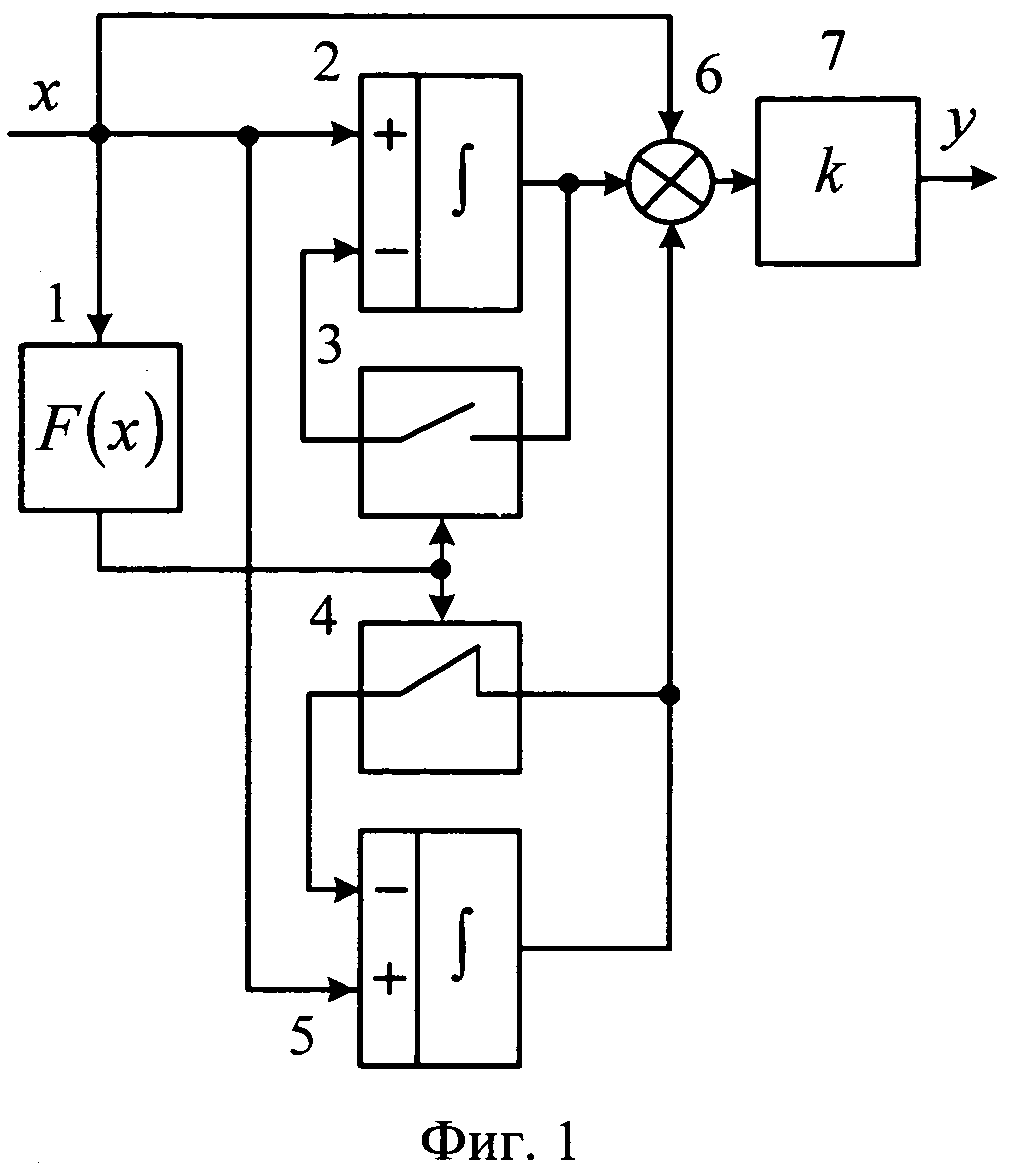
На фиг. 1 приведена функциональная схема аналогового регулирующего устройства, реализующего предлагаемый способ, и поясняющая сущность изобретения. На чертеже обозначено: 1 - нелинейный функциональный преобразователь с характеристикой
2 - первый интегратор; 3 - нормально разомкнутый управляемый ключ; 4 - нормально замкнутый управляемый ключ; 5 - второй интегратор; 6 - сумматор; 7 - усилитель.
В регулирующем устройстве объединенные суммирующие входы первого и второго интеграторов 2 и 5, один из входов сумматора 6 и вход нелинейного функционального элемента 1 объединены и являются входом устройства, нормально разомкнутый управляемый ключ 3 присоединен между выходом и вычитающим входом первого интегратора 2, управляющий вход нормально разомкнутого ключа 3 соединен с выходом нелинейного функционального элемента 1, нормально замкнутый управляемый ключ 4 присоединен между вычитающим входом и выходом второго интегратора 5, управляющий вход нормально замкнутого управляемого ключа 4 соединен с выходом нелинейного функционального элемента 1, выходы первого и второго интеграторов 2 и 5 подключены к входам сумматора, выход которого соединен с входом усилителя 7, выход которого служит выходом устройства, при этом второй интегратор 5 имеет меньший коэффициент передачи, чем первый интегратор 2.
Регулирующее устройство работает следующим образом. Входной сигнал x(t), пропорциональный ошибке регулирования, поступает одновременно на входы первого и второго интеграторов 2 и 5, первый вход сумматора 6 и вход нелинейного функционального элемента 1. Выходные сигналы первого и второго интеграторов 2 и 5 поступают на входы сумматора 6. Первый и второй интеграторы 2 и 5 охвачены отрицательной обратной связью с помощью соответственно нормально разомкнутого 3 и нормально замкнутого 4 ключей. Управление ключами осуществляется выходным сигналом нелинейного функционального элемента 1. Выходной сигнал сумматора 6 поступает на вход усилителя 7, выход которого служит выходом устройства.
При малой ошибке регулирования  выходной сигнал нелинейного функционального элемента 1 имеет значение u1=0, при этом управляемый нормально разомкнутый ключ 3 разомкнут, а нормально замкнутый ключ 4 замкнут. Устройство в этом случае представляет собой регулятор с передаточной функцией
выходной сигнал нелинейного функционального элемента 1 имеет значение u1=0, при этом управляемый нормально разомкнутый ключ 3 разомкнут, а нормально замкнутый ключ 4 замкнут. Устройство в этом случае представляет собой регулятор с передаточной функцией

где k - коэффициент передачи усилителя 7;
T1 - постоянная времени первого интегратора 2;
T2 - постоянная времени второго интегратора 5;
k2 - коэффициент передачи цепи обратной связи второго интегратора 5.
Так как работа системы при малой ошибке регулирования  соответствует установившимся процессам (низкие частоты), то с учетом соотношения Т2>T1 выражение (1) можно приближенно представить в виде
соответствует установившимся процессам (низкие частоты), то с учетом соотношения Т2>T1 выражение (1) можно приближенно представить в виде

Следовательно, при установившихся режимах второй интегратор, охваченный отрицательной обратной связью, не оказывает существенного влияния на работу системы. В этом случае регулирующее устройство представляет собой обычный пропорционально-интегральный регулятор, обеспечивающий астатическое регулирование в системе. В установившемся режиме ошибка регулирования стремится к 0.
В случае превышения абсолютным значением ошибки регулирования порогового уровня x0, например, при изменении сигнала задания или возмущения, выходной сигнал нелинейного функционального элемента 1 принимает значение u1=Ue. В результате этого замыкается нормально разомкнутый ключ 3 и размыкается нормально замкнутый ключ 4. При этом регулирующее воздействие формируется как сумма трех слагаемых: пропорционального ошибке регулирования kx(t), выходного сигнала первого интегратора 2, охваченного обратной связью, и выходного сигнала второго интегратора 5. Передаточная функция устройства при этом имеет вид:

где k1 - коэффициент передачи цепи обратной связи первого интегратора 2.
Так как Т2>Т1, то при переходных процессах в системе расчетной длительности изменение напряжения на выходе второго интегратора значительно меньше изменений на выходе первого интегратора и сигнала рассогласования. Следовательно, передаточную функцию (3) для этих условий можно приближенно представить в виде

В этом случае регулирующее устройство соответствует интегро-дифференцирующему звену.
Таким образом, при предлагаемом способе осуществляется быстрая отработка большой ошибки регулирования, а при достижении ошибкой уровня х0 происходит безударное включение астатической составляющей (пропорциональной интегралу от ошибки регулирования), благодаря чему обеспечивается высокая точность регулирования.
В случае длительного действия большой нагрузки выходное напряжение второго интегратора 5 возрастает до момента достижения ошибкой регулирования значения x0, после чего происходит изменение выходного сигнала нелинейного функционального элемента 1. Далее происходит работа регулирующего устройства в режиме малой ошибки 
Таким образом, второй интегратор 5 не оказывает существенного влияния на работу системы при расчетных режимах, но обеспечивает переход регулирующего устройства в режим астатического регулирования при действии больших нагрузок, вызывающих статические ошибки, превышающие порог x0 срабатывания нелинейного функционального элемента 1.
С целью подтверждения положительного эффекта, достигаемого с помощью предлагаемого технического решения, было проведено математическое моделирование процессов в автоматической системе с предложенным регулирующим устройством. Структурная схема системы показана на фиг. 2, где обозначено: 8 - элемент сравнения, 9 - регулирующее устройство (см. фиг. 1), 10 - исполнительное устройство с коэффициентом передачи kу и ограничением выходного воздействия на уровне U0, 11 - объект управления с передаточной функцией:
 .
.
На фиг. 2 обозначено: z0 - сигнал задания; z - выходной сигнал системы.
При моделировании были приняты следующие параметры объекта и системы управления: k0=2; T0=0,6 с; τ0=1,2 с; kу=1; U0=12 В.
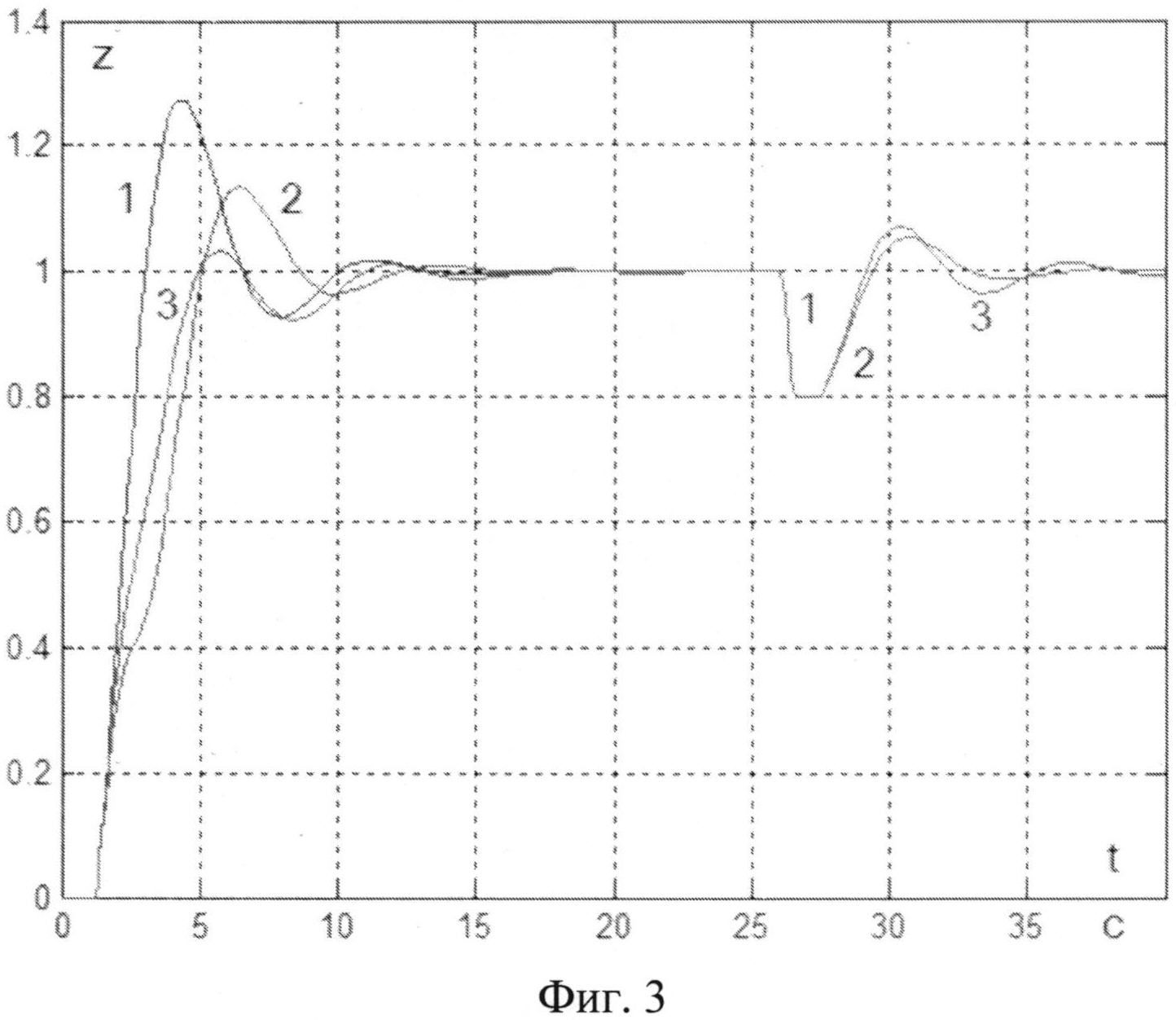
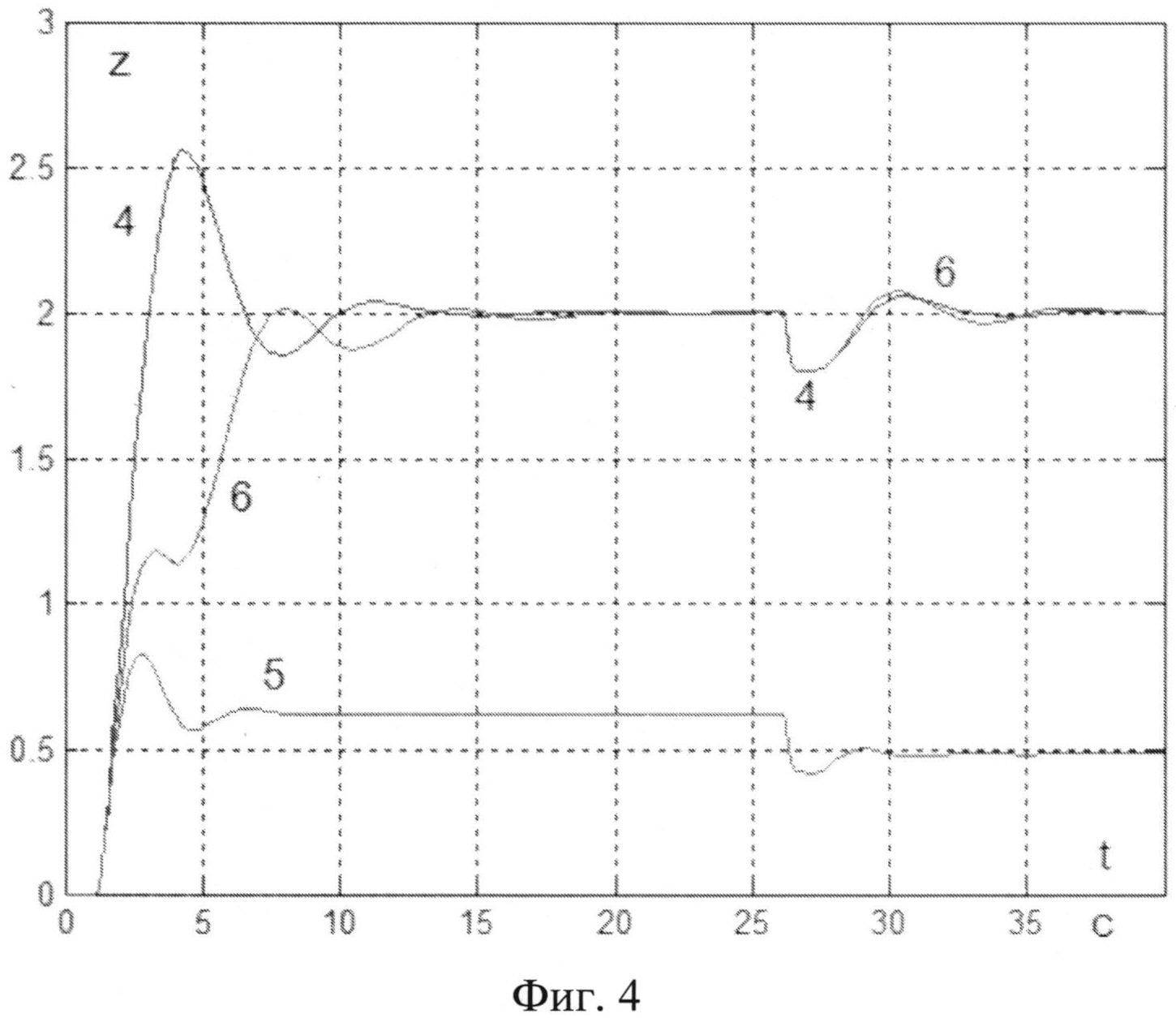
На фиг. 3 и 4 приведены диаграммы переходных процессов в системе для выходного сигнала z при ступенчатом изменении сигнала задания в момент t=0 с и ступенчатом изменении нагрузки при t=25 с:
- линия 1: классическая настройка традиционного пропорционально-интегрального регулятора (Кулаков Г.Т. Инженерные экспресс-методы расчета промышленных систем регулирования. Минск: Вышэйшая школа, 1984, с. 73-86). При этом параметры регулятора были установлены следующими: k=0,15; T1=0,5 с, ограничение воздействия на объект при выборе параметров не учитывалось;
- линия 2: регулирующее устройство с отключением интегратора при больших сигналах рассогласования (прототип); порог переключения функционального элемента 1 выбран равным x0=0,5 В;
- линия 3: предлагаемое регулирующее устройство. Постоянная времени первого интегратора 1.2 равна T1=0,5 с; постоянная времени второго интегратора 1.5 равна T2=4 с; порог переключения функционального элемента 1 выбран равным x0=0,5 В.
На фиг. 3 показаны графики переходных процессов при малых нагрузках и малых значениях рассогласования. В системе с классическим пропорционально-интегральным регулятором перерегулирование составляет 28% (линия 1), в системе с отключением интегратора перерегулирование равно 15% (линия 2), в предлагаемой системе перерегулирование не превышает 5% (линия 3). Время регулирования во всех трех случаях практически одинаковое и составляет 12 с. Переходные процессы при ступенчатом изменении нагрузки при t=25 с во всех случаях практически одинаковые.
На фиг. 4 приведены графики переходных процессов при больших нагрузках и рассогласованиях. В системе с классическим пропорционально-интегральным регулятором перерегулирование составляет 26% (линия 4), в системе с отключением интегратора перерегулирование равно 15% (линия 5), в предлагаемой системе перерегулирование отсутствует (линия 6). Время регулирования в первом и третьем случаях практически одинаковое и составляет 12 с. Переходные процессы при ступенчатом изменении нагрузки при t=25 c во всех случаях практически одинаковые. В системе с отключением интегратора (линия 5, прототип) возникает статическая ошибка, обусловленная тем, что не происходит переключение нелинейного функционального элемента. В предлагаемом техническом решении второй интегратор всегда обеспечивает переход регулирующего устройства в режим астатического регулирования.
Таким образом, предлагаемое техническое решение обеспечивает повышение качества регулирования: снижение перерегулирования, гарантированный режим астатического регулирования и повышение точности при больших нагрузках.
Важным достоинством предлагаемого регулирующего устройства является то, что он может быть легко реализован как аппаратным, так и программным способом.
Использование предлагаемого регулирующего устройства в различных системах автоматики позволит повысить качество процессов управления.
Регулирующее устройство, содержащее интегратор, суммирующий вход которого объединен с входами сумматора и нелинейного функционального элемента с характеристикой где x - входной сигнал устройства; U - напряжение, соответствующее уровню логической единицы; x - пороговое значение,усилитель, подключенный к выходу сумматора, и нормально разомкнутый управляемый ключ, присоединенный между выходом и вычитающим входом интегратора, управляющий вход ключа соединен с выходом нелинейного функционального элемента, отличающееся тем, что дополнительно введены второй интегратор и нормально замкнутый управляемый ключ, присоединенный между вычитающим входом и выходом второго интегратора, вход которого объединен с входом первого интегратора, а выход подключен к входу сумматора, управляющий вход нормально замкнутого управляемого ключа соединен с выходом нелинейного функционального элемента, при этом второй интегратор имеет большую постоянную времени, чем первый.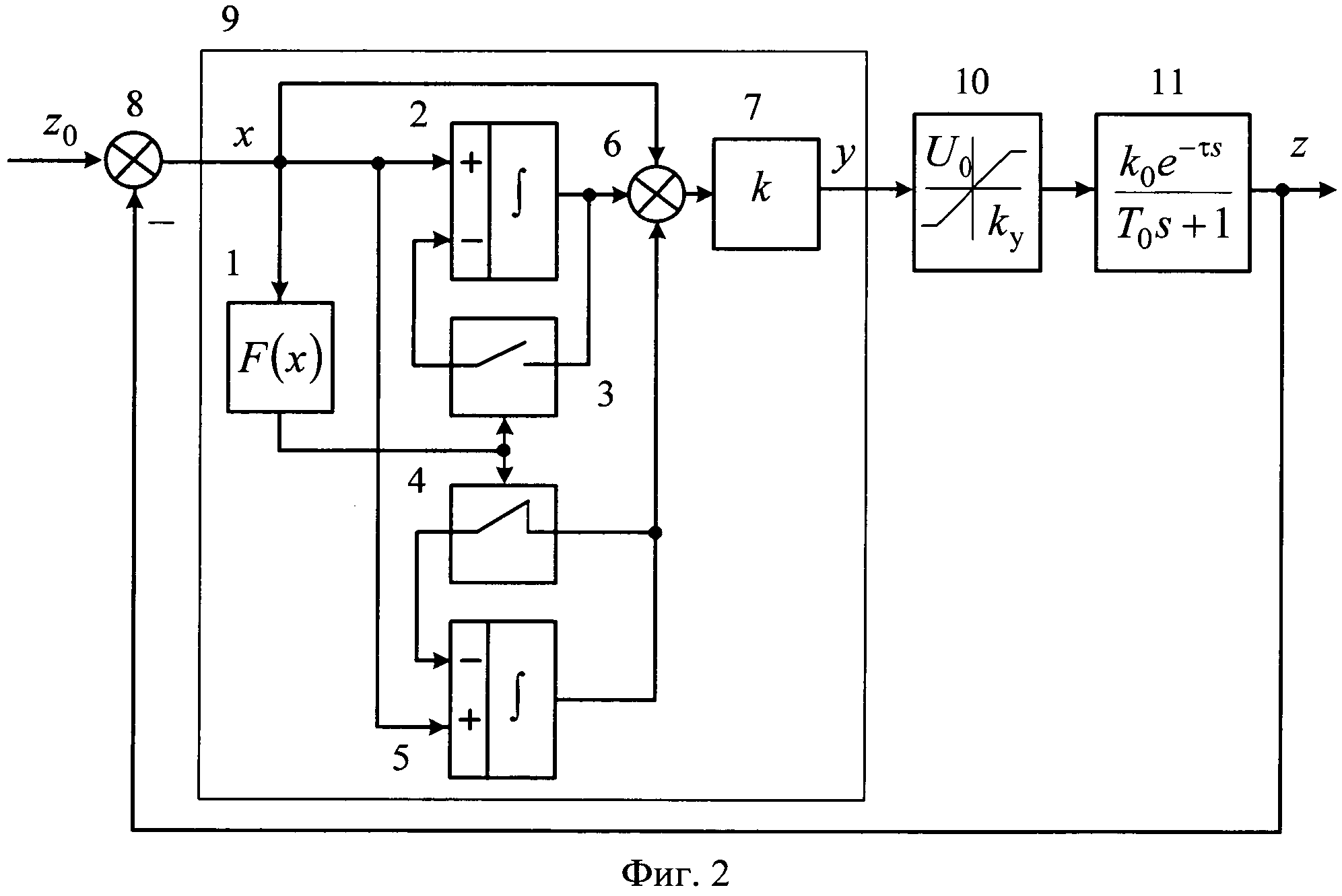
Способ уборки снега с проезжей части
Способ испытания электрических машин постоянного тока
Электрический привод
Электропривод прокатного стана
Способ измерения силы трения при прокатке металлов
Способ контроля и визуализации работы щеточно-коллекторного узла электрического двигателя постоянного тока
Электрический привод прокатного стана
Автоматизированный электропривод прокатного стана
Способ погрузки сыпучих материалов из насыпи
Способ контроля износа щеток и работы щеточно-коллекторного узла электрической машины
Электропривод прокатного стана
Способ измерения силы трения при прокатке металлов
Способ контроля и визуализации работы щеточно-коллекторного узла электрического двигателя постоянного тока
Электрический привод прокатного стана
Автоматизированный электропривод прокатного стана
Способ контроля износа щеток и работы щеточно-коллекторного узла электрической машины
Способ определения остаточного ресурса автоматических выключателей
Способ идентификации параметров линии электропередачи, питающей экскаватор
Способ контроля ресурса изоляции силового трансформатора
Стенд для испытания электрических машин в динамическом режиме

