Результат интеллектуальной деятельности: СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД
Вид РИД
Изобретение
Изобретение относится к области электротехники и может быть использовано в следящих электроприводах с исполнительными двигателями постоянного тока или с синхронными машинами, работающими в режимах вентильного двигателя или бесколлекторного двигателя постоянного тока.
Наиболее близким по технической сущности является структурно-минимальный электропривод (см. Галицков С.Я., Галицков К.С. Многоконтурные системы управления с одной измеряемой координатой. - Самара: СГАСУ, 2004. - С.15-35), содержащий блок задания, интегральный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, электродвигатель и датчик положения.
Недостаток наиболее близкого по технической сущности следящего электропривода заключается в том, что он обладает низким быстродействием.
Сущность изобретения состоит в том, что следящий электропривод, содержащий блок задания, интегральный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, электродвигатель с исполнительным механизмом и датчик положения, причем выход блока задания соединен с первым входом интегрального регулятора, выход пропорционально-дифференциального регулятора соединен с входом силового преобразователя, выход которого соединен с электродвигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен с вторым входом интегрального регулятора, дополнительно снабжен пропорциональным регулятором и блоком дифференцирования, причем выход интегрального регулятора соединен с первым входом пропорционального регулятора, выход которого соединен с первым входом пропорционально-дифференциального регулятора, выход датчика положения соединен с вторым входом пропорционального регулятора и входом блока дифференцирования, выход которого соединен с вторым входом пропорционально-дифференциального регулятора.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет повысить быстродействие следящего электропривода.
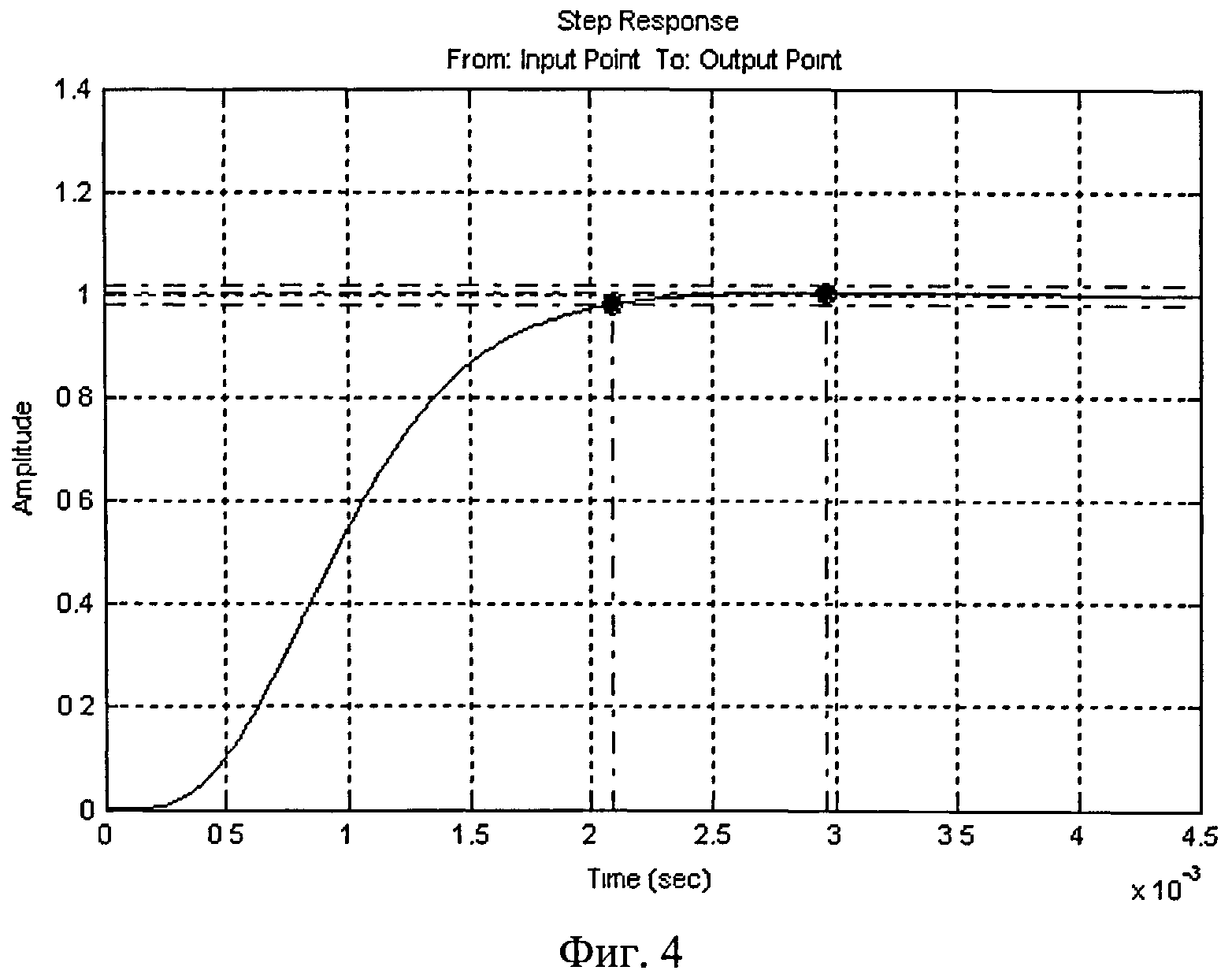
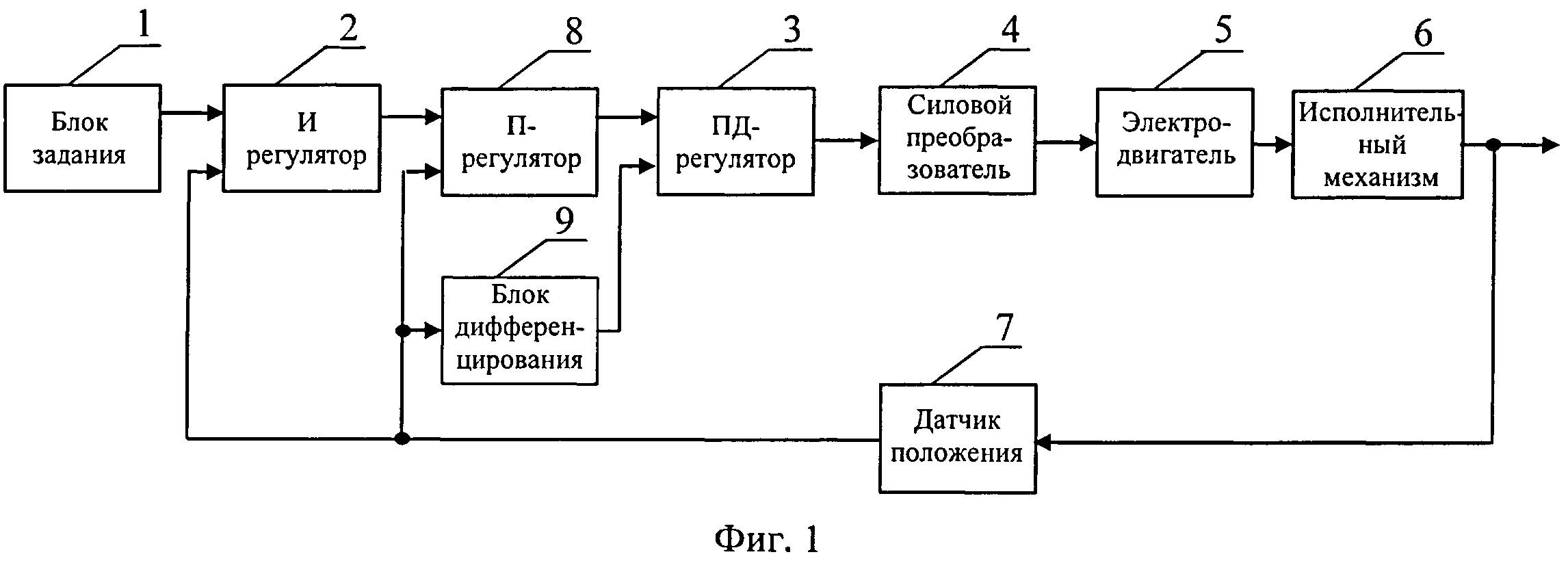
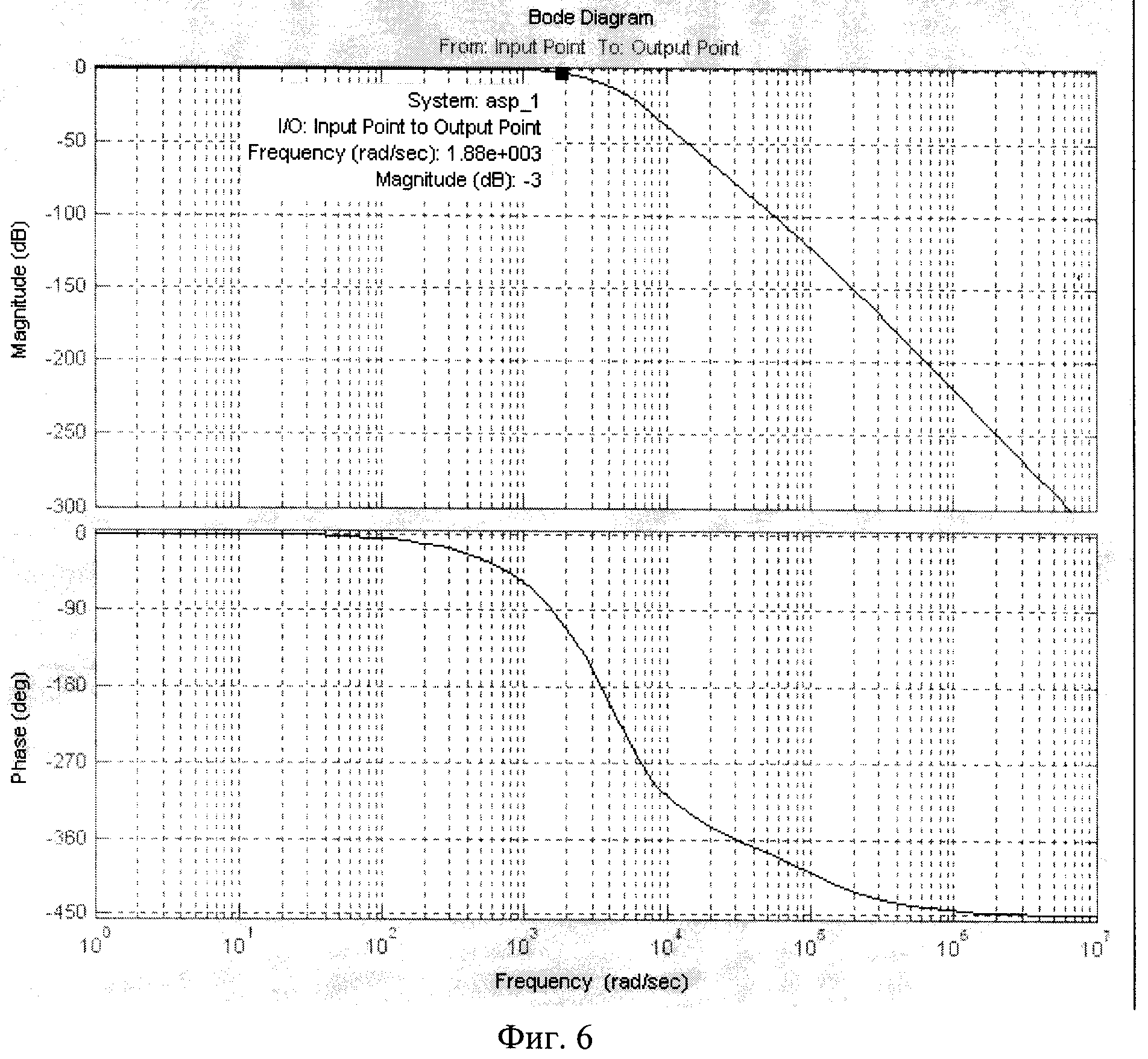
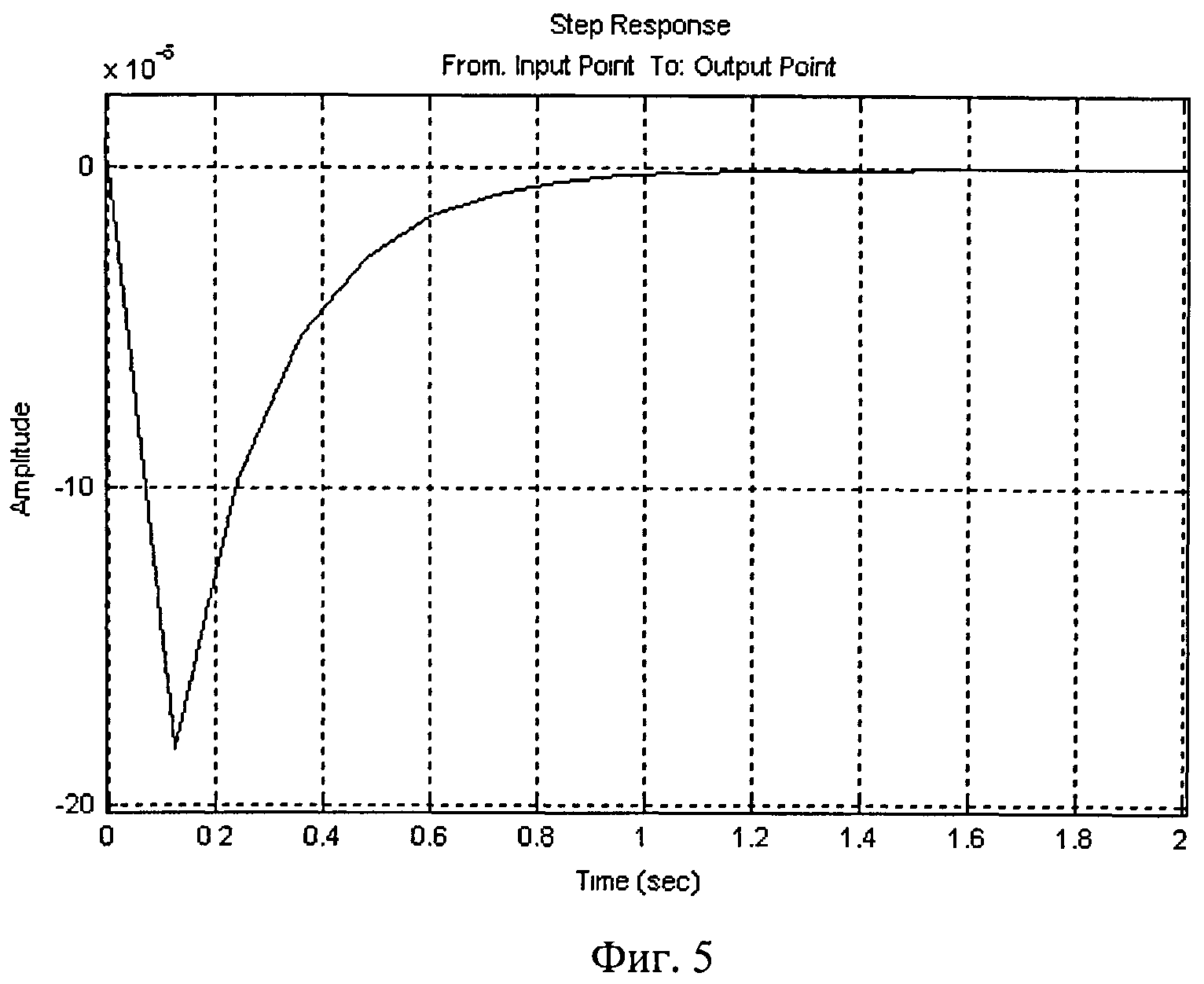
На фиг.1 приведена функциональная следящего электропривода; на фиг.2 - структурная схема следящего электропривода, на фиг.3 - расчетная модель следящего электропривода; на фиг.4 - переходный процесс по управляющему воздействию; на фиг.5 - переходный процесс по возмущающему воздействию; на фиг.6 - частотные характеристики электропривода.
Следящий электропривод (фиг.1) содержит блок 1 задания, интегральный регулятор 2, пропорционально-дифференциальный регулятор 3, силовой преобразователь 4, электродвигатель 5 с исполнительным механизмом 6, датчик 7 положения, пропорциональный регулятор 8 и блок 9 дифференцирования.
Выход блока 1 задания соединен с первым (прямым) входом интегрального регулятора 2. Выход пропорционально-дифференциального регулятора 3 соединен с входом силового преобразователя 4, выход которого соединен с электродвигателем 5, кинематически связанным с исполнительным механизмом 6. Исполнительным механизм 6 оснащен датчиком 7 положения, выход которого соединен с вторым (инверсным) входом интегрального регулятора 2. Выход интегрального регулятора 2 соединен с первым (прямым) входом пропорционального регулятора 8, выход которого соединен с первым (прямым) входом пропорционально-дифференциального регулятора 3, выход датчика 7 положения соединен с вторым (инверсным) входом пропорционального регулятора 8 и входом блока 9 дифференцирования, выход которого соединен с вторым (инверсным) входом пропорционально-дифференциального регулятора 3.
Блок 1 задания параметров может быть выполнен, например, на микросхемах К555ТМ8, разрядные входы которых подключаются с помощью переключателей к логическим нулям или единицам. Интегральный 2, пропорционально-дифференциальный 3 и пропорциональный 8 регуляторы и блок 9 дифференцирования могут быть реализованы, например, по а.с. СССР №1649501, опубл. 15.05.91, Бюл. №18 и выполнены, например, на микросхемах серии К555. Силовой преобразователь 4 для электродвигателя постоянного тока, например, реализован в виде цифрового широтно-импульсного модулятора по а.с. СССР №1748241, опубл. 15.07.92, Бюл. №26, с силовым транзисторным мостом на выходе. Для синхронной машины, работающей в режиме вентильного двигателя силовой преобразователь 4 может быть выполнен, например, в виде цифрового модулятора по а.с. СССР №1798907, опубл. 28.02.93, Бюл. №8, с силовым трехфазным транзисторным мостом на выходе. В качестве электродвигателя 5 может быть использован, например, любой электродвигатель постоянного тока или синхронная машина с датчиком положения ротора, например, 4CX2П100L8. Исполнительный механизм 6, например, может представлять собой стол координатно-расточного станка, соединенный с помощью ходового винта и муфты с валом электродвигателя 5. В качестве датчика 7 положения, например, может быть использована фотооптическая линейка BE 162 с соответствующим устройством оцифровки ее выходного сигнала.
Следует также отметить, что блок 1 задания параметров, интегральный 2, пропорционально-дифференциальный 3 и пропорциональный 8 регуляторы и блок 9 дифференцирования могут быть реализованы также программно на микропроцессорном контроллере.
Следящий электропривод работает следующим образом. В соответствии с величиной задающего сигнала, поступающего выхода блока 1 задания, и сигнала датчика 7 положения интегральный регулятор 2 в совокупности с пропорциональным регулятором 8, блоком 9 дифференцирования и пропорционально-дифференциальным регулятором формируют сигнал на входе силового преобразователя 4. Силовой преобразователь 4 преобразует этот сигнал в напряжение на якоре электродвигателя 5 постоянного тока (статоре синхронной машины). При этом вал электродвигателя начинает вращаться и приводит в движение исполнительный механизм 6, перемещение которого измеряется датчиком 7 положения. Движение продолжается до тех пор, пока величина сигнала с датчика 7 положения не сравняется с величиной задающего сигнала, поступающего с выхода блока 1 задания. Интегральный регулятор 2 компенсирует действие всех помех, охваченных датчиком 7. Пропорциональный регулятор 8, блок 9 дифференцирования и пропорционально-дифференциальный регулятор 3 обеспечивают компенсацию основных инерционностей электродвигателя 5 и исполнительного механизма 6.
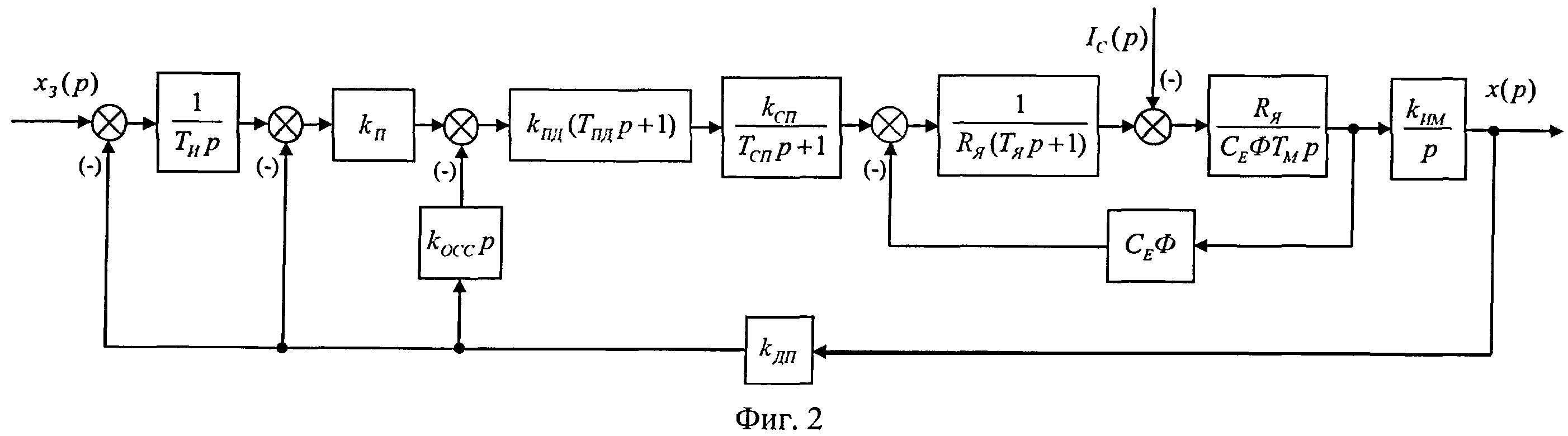
Для подтверждения высокого быстродействия предлагаемого следящего электропривода рассмотрим его структурную схему (фиг.2). Она содержит три контура: внутренний контур скорости и два контура положения. Для организации обратной связи по скорости сигнал безинерционного датчика положения с коэффициентом передачи kДП дифференцируется звеном с передаточной функцией
WOCC(p)=kOCCp,
где kOCC - коэффициент передачи по скорости (постоянная времени дифференцирования).
Электродвигатель постоянного тока представлен в виде двух последовательно соединенных звеньев, охваченных отрицательной обратной связью по э.д.с. двигателя с коэффициентом передачи СЕФ. Первое из этих звеньев описывает статические и динамические свойства якорной цепи электродвигателя, определяемые ее активным сопротивлением RЯ и индуктивностью LЯ
 ,
,
где  - электромагнитная постоянная времени якорной цепи двигателя.
- электромагнитная постоянная времени якорной цепи двигателя.
Второе звено, выходом которого является скорость ω электродвигателя, учитывает механическую инерционность объекта и в соответствии с основным уравнением движения электропривода описывается передаточной функцией
 ,
,
где  - электромеханическая постоянная времени, J - суммарный момент инерции привода, приведенный к валу двигателя, СЕ и СМ - конструктивные коэффициенты электрической машины.
- электромеханическая постоянная времени, J - суммарный момент инерции привода, приведенный к валу двигателя, СЕ и СМ - конструктивные коэффициенты электрической машины.
Такое представление справедливо и для синхронной машины, работающей в режиме вентильного двигателя или бесколлекторного двигателя постоянного тока.
Исполнительный механизм представлен интегральным звеном, связывающим перемещение x(p) (угловое или линейное) со скоростью ω(p) электродвигателя
 ,
,
где kИМ - коэффициент передачи исполнительного механизма.
Силовой преобразователь с достаточной для инженерных расчетов точностью можно считать апериодическим звеном с передаточной функцией
 ,
,
где kСП и ТСП - коэффициент передачи и постоянная времени силового преобразователя, соответственно.
Пропорционально-дифференциальный регулятор первого (внутреннего) контура представлен передаточной функцией
WПД(р)=kПД(ТПДр+1),
где kПД - коэффициент передачи, а ТПД - постоянная времени регулятора.
Пропорциональный регулятор второго контура имеет коэффициент передачи kП. Интегральный регулятор третьего (внешнего) контура представлен передаточной функцией
 ,
,
где ТИ - постоянная времени.
Передаточная функция объекта управления, под которым понимается совокупность электродвигателя и исполнительного механизма,
 .
.
В большинстве случаев последнее выражение можно представить в виде

где Т1 и Т2 постоянные времени, получающиеся из разложения знаменателя передаточной функции (1). Для определенности будем считать, что Т1<Т2.
Пропорционально-дифференциальный регулятор внутреннего контура предназначен для компенсации наибольшей инерционности объекта управления, поэтому его постоянная времени выбирается из условия
ТПД=Т2.
С учетом этого передаточная функция следящего электропривода
 ,
,
где k1=kПДkСПkДУkИМkДПkОСС; k2=kПkПДkСПkДУkИМkДП;  .
.
Величины коэффициентов передачи пропорционального kП и пропорционально-дифференциального kПД регуляторов выбираются из условия
 .
.
Величина постоянной времени интегрального регулятора выбирается из следующего условия
 .
.
Промоделируем рассматриваемый следящий электропривод в среде «МАТLАВ SIMULINK» для конкретной технической реализации. Расчетная модель следящего электропривода приведена на фиг.3. В ней учтено, что следящий электропривод используется в приводе подачи координатно-расточного станка с исполнительным электродвигателем 2ПБВ 100 М. Конструктивный коэффициент исполнительного электродвигателя СЕФ=0,375 Вс/рад. Исполнительный двигатель связан с подвижным узлом, например, столом шарико-винтовой парой с шагом h=10 мм/об. С учетом инерционности исполнительного механизма и активного и индуктивного сопротивлений силового преобразователя электромагнитная и электромеханическая постоянные времени электродвигателя равны ТЯ=0,005 с и ТМ=0,199 с. Так как фактически задающий сигнал следящего электропривода формируется в дискретах датчика положения, то kДП=1, а коэффициент передачи исполнительного механизма kИМ=1592 дискрет/рад (при дискретности измерения в 1 мкм). В качестве силового преобразователя в электроприводе используется 14 разрядный цифровой широтно-импульсный преобразователь с частотой коммутации силовых транзисторов 5 кГц и максимальным выходным напряжением 120 В, поэтому kСП=0,0073 В/дискрету, ТСП=0,0001 с. В расчетной модели также учтено, что выбраны следующие настройки регуляторов: ТПД=0,1937 с, kПД=256, kП=8, ТИ=0,001 с. Расчетная модель позволяет построить переходные процессы по управлению (рис.4) и возмущению (рис.5), а также частотные характеристики следящего электропривода (рис.6). Анализ построенных графиков показывает, что время переходного процесса по управлению составляет tПП=0,00209 с, а перерегулирование - σ=0,465%. Динамический провал при набросе момента, эквивалентного току нагрузки в 1A не превышает Δxmax=0,000182 мкм, а статическая ошибка позиционирования равна нулю. Полоса частот пропускания следящего электропривода составляет 1880 рад/с или 299 Гц.
Полученные результаты позволяют сказать, что предложенный следящий электропривод практически в 10 раз превосходит по быстродействию устройство, взятое за прототип.
Таким образом, предлагаемый электропривод позволяет повысить быстродействие следящих систем.
Следящий электропривод, содержащий блок задания, интегральный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, электродвигатель с исполнительным механизмом и датчик положения, причем выход блока задания соединен с первым входом интегрального регулятора, выход пропорционально-дифференциального регулятора соединен с входом силового преобразователя, выход которого соединен с электродвигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен с вторым входом интегрального регулятора, отличающийся тем, что он дополнительно снабжен пропорциональным регулятором и блоком дифференцирования, причем выход интегрального регулятора соединен с первым входом пропорционального регулятора, выход которого соединен с первым входом пропорционально-дифференциального регулятора, выход датчика положения соединен с вторым входом пропорционального регулятора и входом блока дифференцирования, выход которого соединен с вторым входом пропорционально-дифференциального регулятора.
Система управления аппаратом воздушного охлаждения масла
Следящий электропривод
Система управления погружным электроцентробежным насосом и кустовой насосной станцией
Цифровой модулятор для управления синхронным электродвигателем
Система управления аппаратом воздушного охлаждения масла
Адаптивная система управления аппаратом воздушного охлаждения масла
Система управления электромагнитным подвесом ротора
Цифровой регулятор для системы управления электромагнитным подшипником
Следящий электропривод с асинхронным исполнительным двигателем
Цифровой модулятор для силового преобразователя электромагнитного подшипника
Способ изготовления абразивного инструмента
Теплоаккумулирующий состав
Демпфирующее устройство дренажно-предохранительного клапана
Способ изготовления поверхностей трения с применением твердых смазочных материалов на основе эпоксидных смол
Система управления аппаратом воздушного охлаждения масла
Способ получения многоосновных карбоновых кислот адамантанового ряда
Установка для мойки прецизионных подшипников
Способ производства диетического хлеба (варианты)
Способ извлечения твердосплавных зубков из шарошек буровых долот
Шихта для получения стекла

