Результат интеллектуальной деятельности: КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Предлагаемое устройство предназначено для применения в области авиационного приборостроения, в частности в пилотажно-навигационном оборудовании летательных аппаратов (ЛА) авианосного базирования.
Полет любого ЛА можно разделить на:
- взлет;
- полет по маршруту;
- посадку.
В целом посадка включает в себя следующие этапы: предпосадочное маневрирование, которое также называют этапом возврата, заход на посадку и непосредственно приземление.
Задачей этапа возврата является вывод ЛА в заданную область воздушного пространства относительно взлетно-посадочной полосы (ВПП) с таким расчетом, чтобы ЛА находился на продолжении оси ВПП на установленной высоте и дальности относительно торца ВПП с курсом, примерно равным направлению ВПП. Т.е. ЛА должен быть выведен в заданную область воздушного пространства с заданными параметрами пространственного положения, где гарантированно обеспечиваются условия стабильного функционирования бортовых и наземных посадочных систем.
Различные аспекты функционирования бортового оборудования, обеспечивающего предпосадочное маневрирование ЛА, приведены в следующих работах:
1. Батенко А.П. Управление конечным состоянием движущихся объектов. М., "Советское радио", 1977 г., 256 с.
2. Воробьев Л.М. Воздушная навигация, М.: Машиностроение, 1984.
3. Рогожин В.О. и др. Пiлотажно-навiгацiйнi комплекси повiтряних суден, К.: Книжкове видавництво НАУ, 2005 (на украинском языке).
4. Справочник пилота и штурмана гражданской навигации. Под редакцией Васина И.Ф., М.: Транспорт, 1988.
5. Патент РФ на изобретение №2240589 с приоритетом от 31.07.2003. Способ автоматического управления летательным аппаратом при выходе на линию взлетно-посадочной полосы.
6. Патент РФ на изобретение №2276328 с приоритетом от 21.06.2005. Прицельно-навигационный комплекс многофункционального самолета авианосного и наземного базирования.
Описание, наиболее близкого к предлагаемому изобретению, устройства приведено в патенте РФ на изобретение №2276328 [6].
С учетом цели предлагаемого изобретения делаем следующие, не противоречащие содержанию описания вышеуказанного патента на изобретение, допущения - полагаем, что:
- устройство также включает комплект радиотехнических средств связи (РСС), взаимодействующих по эфиру с радиотехнической системой связи авианосца и обеспечивающих прием параметров движения корабля (координаты φК, λК, курс ψК, скорость VК), которые измеряются непосредственным образом бортовым оборудованием корабля;
- в состав вычислительно-логических модулей вычислительной системы устройства также входит модуль формирования управляющих сигналов (ФУС) для системы автоматического управления (САУ), функционирующий в соответствии со способом, описанным в патенте РФ на изобретение №2240589 [5].
Таким образом, полагаем, что в целом устройство-прототип описано одновременно в двух патентах РФ на изобретения №2276328 [6] и №2240589 [5].
С учетом только существенных, для предлагаемого изобретения, признаков устройство-прототип содержит взаимосоединенные входами-выходами по каналу информационного обмена (КИО) комплект многофункциональных индикаторов (МФИ), комплект навигационно-пилотажных средств (НПС), переносной носитель исходных данных (ПНИД), комплект радиотехнических средств связи (РСС), вычислительную систему (ВС), включающую взаимосоединенные входами-выходами по магистрали вычислительного информационного обмена (МВИО) вычислительно-логические модули (ВЛМ) объединенной базы данных (ОБД), формирования навигационно-пилотажных параметров (ФНПП), формирования отображаемой информации (ФОИ), формирования управляющих сигналов (ФУС), ввода-вывода и управления информационным обменом (ВВУИО), вход-выход которого является входом-выходом ВС.
На чертеже (см. фиг.1) представлена блок-схема устройства-прототипа, содержащего:
1. комплект многофункциональных индикаторов МФИ;
2. комплект навигационно-пилотажных средств НПС;
3. переносной носитель исходных данных ПНИД;
4. комплект радиотехнических средств связи РСС;
5. канал информационного обмена КИО;
6. вычислительную систему ВС, включающую:
7. магистраль вычислительного информационного обмена МВИО,
8. ВЛМ объединенной базы данных ОБД,
9. ВЛМ формирования навигационно-пилотажных параметров ФНПП,
10. ВЛМ ввода-вывода и управления информационным обменом ВВУИО,
11. ВЛМ формирования отображаемой информации ФОИ,
12. ВЛМ формирования управляющих сигналов ФУС.
Устройство-прототип является комплексной системой навигации и управления ЛА обеспечивающей формирование навигационной и пилотажной информации, ее представление на многофункциональных индикаторах, управление ЛА в ручном и автоматическом режимах.
Система-прототип функционирует следующим образом.
Информационная взаимосвязь всего оборудования устройства осуществляется по КИО, включающему электрические, механические, электромеханические связи.
МФИ содержит "n" многофункциональных индикаторов с цветными жидкокристаллическими экранами (ЖКЭ).
Комплект НПС включает инерциальные навигационные системы (ИНС), спутниковые навигационные системы (СНС), системы воздушных сигналов и другие системы, измеряющие параметры движения ЛА при подготовке и в полете, которые с входа-выхода НПС через КИО поступают на вход-выход ВС и через ВВУИО и МВИО в ФНПП, ФОИ, ФУС.
ПНИД является носителем полетных заданий с долговременной репрограммируемой памятью (типа стандартных флеш-карт), подготавливаемых на наземных пунктах планирования полетных заданий. Введенные в ПНИД исходные данные для бортового оборудования, параметры навигационных точек на маршруте, параметры возможных аэродромов базирования, параметры возможных кораблей базирования и другие данные через КИО поступают на вход ВС, а затем через ВВУИО и МВИО в ОБД.
Комплект РСС обеспечивает обмен кодированной информацией между кораблем и ЛА.
ВС является вычислительной системой, при этом все ВМЛ, входящие в состав ВС, исполнены по стандартным вычислительным схемам на основе процессоров и запоминающих устройств.
ВВУИО через один вход-выход осуществляет прием, преобразование и передачу данных во взаимодействующее оборудование через вход-выход ВС по КИО. Другой вход-выход ВВУИО подключен к МВИО, осуществляющей информационный обмен между всеми ВМЛ ВС.
ОБД выполнен на стандартном долговременном запоминающем устройстве, хранящем данные, поступившие с ПНИД.
В ФНПП осуществляется комплексная обработка информации от КНПС, ОБД и формируются текущие навигационно-пилотажные параметры ЛА, поступающие по МВИО в ФОИ и ФУС.
В ФОИ по данным, полученным по МВИО от ОБД, ФНПП, ФУС и от взаимодействующего оборудования через КИО и ВВУИО, формируются обобщенные мнемокадры функциональной, цифробуквенной информации, совмещенной с представлением многофункционального пульта управления. Сформированные мнемокадры изображений с входа-выхода ФОИ через МВИО, ВВУИО, КИО поступают в МФИ для отображения на экранах с целью принятия решения экипажем для работы с оборудованием комплекса через обрамляющие экраны многофункциональных индикаторов органы управления (сенсорные кнопки, кнопки-клавиши).
В ФУС, на этапе предпосадочного маневрирования по текущим координатам ЛА φЛА, λЛА из ФНПП, координатам начала ВПП φВПП, λВПП и курсу ВПП ψВПП из ОБД определяют текущие координаты ЛА ХЛА, YЛА в системе координат, связанной с началом ВПП:
XЛА=Δλ·sinψВПП+Δφ·cosψВПП,
YЛА=-Δλ·cosψВПП+Δφ·sinψВПП,
где Δφ=(φЛА-φВПП)·R, Δλ=(λЛА-λВПП)·R·cosφЛА, R - радиус Земли, который с достаточной точностью для рассматриваемой задачи может быть принят равным 6371 км.
По текущим координатам ЛА XЛА, YЛА и заданным координатам центра вынесенной окружности относительно начала ВПП X0=ДВТ, Y0=RЗ определяют заданный курс ЛА ψЗ на точку касания А вынесенной окружности в географической системе координат, который вместе с сигналом истинного курса ЛА ψИ поступает на индикацию и в систему автоматического управления (САУ) ЛА:
 ,
,
где  - линейная дальность до точки А касания заданной вынесенной окружности, RЗ - постоянный радиус заданной вынесенной окружности, соответствующий заданной скорости ЛА VЗ при выходе в точку А на заданной высоте НЗ, αСН - угол сноса ЛА.
- линейная дальность до точки А касания заданной вынесенной окружности, RЗ - постоянный радиус заданной вынесенной окружности, соответствующий заданной скорости ЛА VЗ при выходе в точку А на заданной высоте НЗ, αСН - угол сноса ЛА.
Отклонение рулевых поверхностей ЛА для маневра в боковой плоскости осуществляется с учетом рассогласования между текущим и заданным курсами и после того, как текущий курс ЛА ψИ сравняется с заданным курсом ψЗ и вектор скорости ЛА будет направлен на точку А, крен ЛА становится равным нулю, и ЛА летит на точку А касания заданной окружности.
Для управления в продольной плоскости для индикации и для САУ в ФУС формируется отклонение ЛА от программной высоты ΔН:
ΔН=HЛА-НПР,
где НЛА - значение текущей высоты ЛА из ФНПП, НПР=НЗ+tg(θЗ)·D - программное значение высоты, θЗ - заданный угол наклона траектории снижения из ОБД, НЗ - заданное значение высоты ЛА в точке А из ОБД.
Отклонение рулевых поверхностей ЛА для маневра в продольной плоскости осуществляется с учетом отклонение ЛА от программной высоты ΔН.
Таким образом, ЛА летит в точку А касания заданной окружности с радиусом RЗ, вынесенную по оси ВПП на расстояние ДВТ от ее края и находящуюся на заданной высоте НЗ. После прохождения точки А на высоте НЗ производится разворот ЛА в сторону ВПП, а затем выравнивание ЛА по линии ВПП с курсом, равным курсу ВПП. На этом этап возврата заканчивается и начинается этап захода на посадку.
Основным недостатком этого устройства, при использовании для возврата на авианосец, является тот факт, что управление ЛА осуществляется в предположении постоянства координат ВПП. Изменение координат корабля приведет к тому, что траектория по которой будет следовать ЛА, в соответствии со сформированными в данном устройстве управляющими сигналами, будет постоянно изменяться и будет неоптимальной, что может привести к уменьшению безопасности полета.
Целью настоящего изобретения является расширение функциональных возможностей устройства и повышение точности управления ЛА при выходе на линию ВПП движущегося корабля.
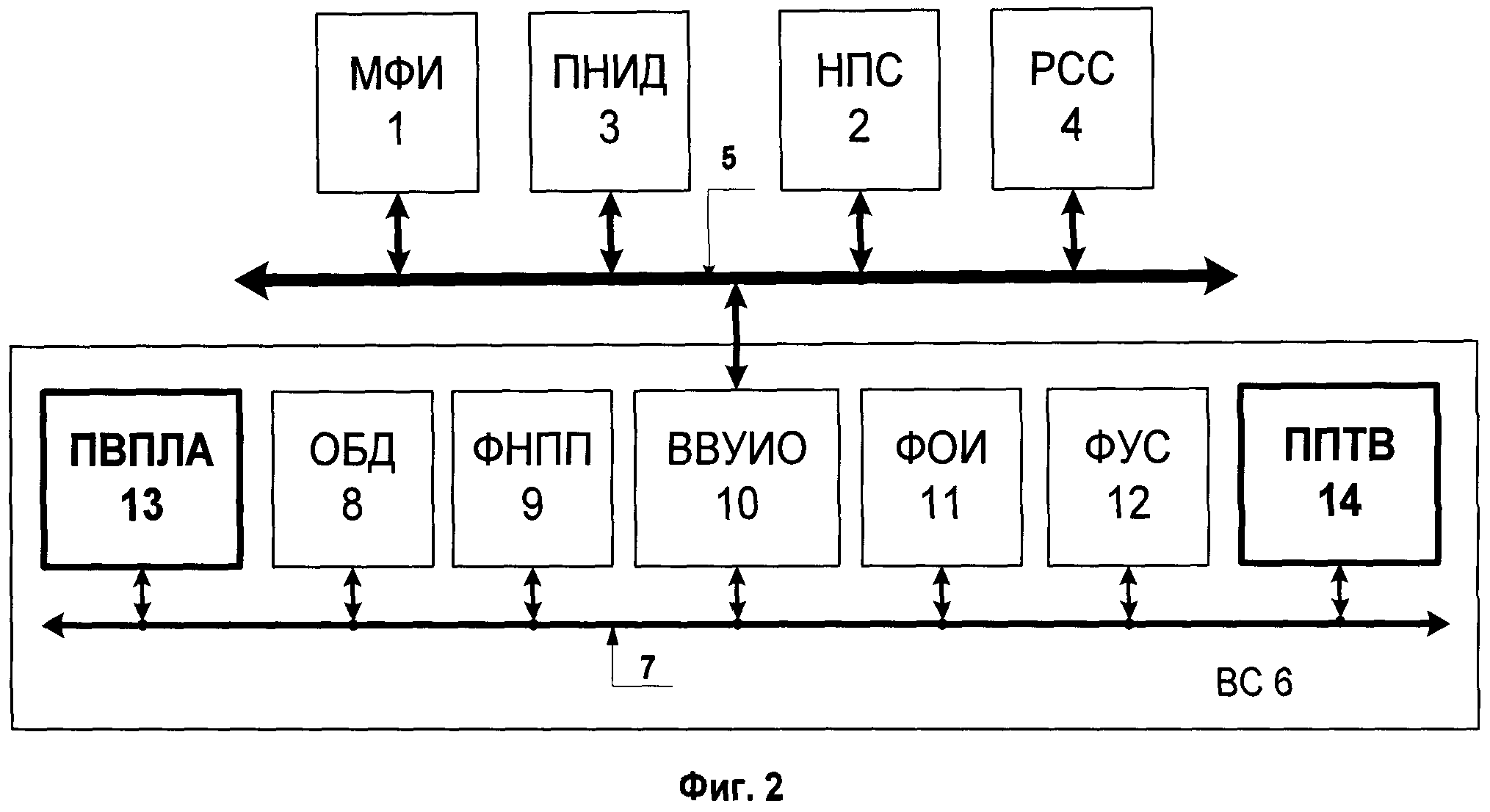
Поставленная цель достигается тем, что в известной комплексной системе навигации и управления ЛА, включающей взаимосоединенные входами-выходами по каналу информационного обмена комплект многофункциональных индикаторов, комплект навигационно-пилотажных средств, переносной носитель исходных данных, комплект радиотехнических средств связи, взаимодействующих по эфиру с радиотехнической системой связи авианосца, вычислительную систему, включающую взаимосоединенные входами-выходами по магистрали вычислительного информационного обмена вычислительно-логические модули объединенной базы данных (ОБД), формирования навигационно-пилотажных параметров (ФНПП), формирования отображаемой информации (ФОИ), формирования управляющих сигналов (ФУС), ввода-вывода и управления информационным обменом (ВВУИО), в состав вычислительной системы введены дополнительные вычислительно-логические модули оценки пространственно-временных параметров движения ЛА (ПВПЛА) на возврате и прогноза параметров точки встречи (ППТВ) ЛА и корабля, взаимосоединенные между собой и с вычислительно-логическими модулями ОБД, ФНПП, ФОИ, ФУС и ВВУИО по магистрали вычислительного информационного обмена.
На чертеже (см. фиг.2) представлена блок-схема предлагаемого устройства, содержащего:
1. комплект многофункциональных индикаторов МФИ;
2. комплект навигационно-пилотажных средств НПС;
3. переносной носитель исходных данных ПНИД;
4. комплект радиотехнических средств связи РСС;
5. канал информационного обмена КИО;
6. вычислительную систему ВС, включающую:
7. магистраль вычислительного информационного обмена МВИО,
8. ВЛМ объединенной базы данных ОБД,
9. ВЛМ формирования навигационно-пилотажных параметров ФНПП,
10. ВЛМ ввода-вывода и управления информационным обменом ВВУИО,
11. ВЛМ формирования отображаемой информации ФОИ,
12. ВЛМ формирования управляющих сигналов ФУС;
13. ВЛМ оценки пространственно-временных параметров ЛА ПВПЛА;
14. ВЛМ прогноза параметров точки встречи ЛА и корабля ППТВ.
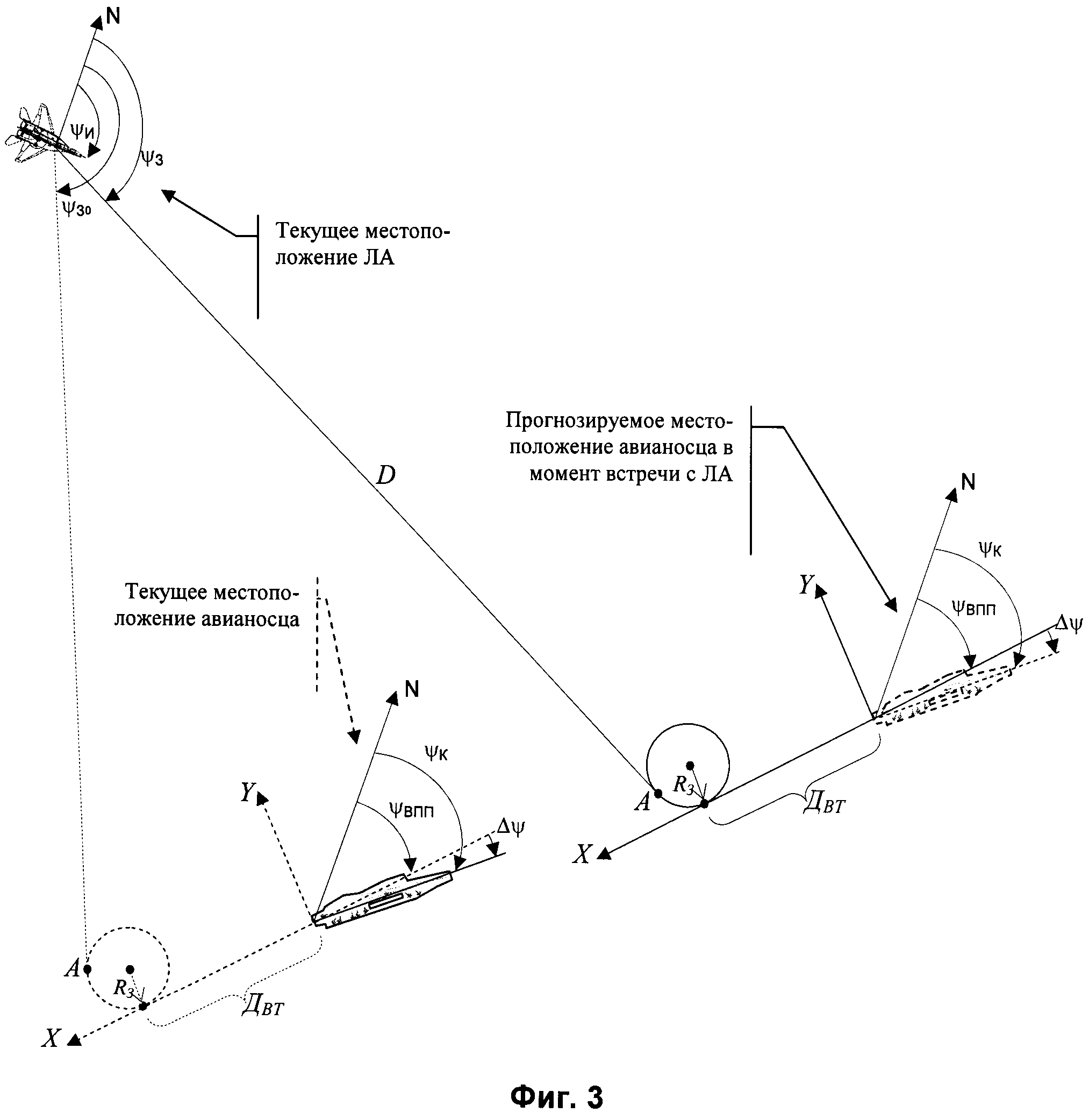
Функционирование предлагаемой системы на этапе возврата на корабль проиллюстрировано рисунком на фиг.3.
Предлагаемая система функционирует следующим образом.
Информационная взаимосвязь всего оборудования устройства осуществляется по КИО, включающему электрические, механические, электромеханические связи.
МФИ содержит "n" многофункциональных индикаторов с цветными жидкокристаллическими экранами (ЖКЭ).
Комплект НПС включает инерциальные навигационные системы (ИНС), спутниковые навигационные системы (СНС), системы воздушных сигналов и другие системы, измеряющие параметры движения ЛА при подготовке и в полете, которые с входа-выхода НПС через КИО поступают на вход-выход ВС и через МВИО и ВВУИО в ФНПП, ФОИ, ФУС.
ПНИД является носителем полетных заданий с долговременной репрограммируемой памятью (типа стандартных флеш-карт), подготавливаемых на наземных пунктах планирования полетных заданий. Введенные в ПНИД исходные данные для бортового оборудования, параметры навигационных точек на маршруте, параметры возможных аэродромов базирования, параметры возможных кораблей базирования и другие данные через КИО поступают на вход ВС, а затем через ВВУИО и МВИО в ОБД.
Комплект РСС обеспечивает обмен кодированной информацией между кораблем и ЛА. В частности, с корабля через РСС в ВС поступают данные о текущих координатах корабля φК, λК, его скорости VК и курсе ψК.
ВС является вычислительной системой, при этом все ВМЛ, входящие в состав ВС, исполнены по стандартным вычислительным схемам на основе процессоров и запоминающих устройств.
ВВУИО через один вход-выход осуществляет прием, преобразование и передачу данных во взаимодействующее оборудование через вход-выход ВС по КИО. Другой вход-выход ВВУИО подключен к МВИО, осуществляющей информационный обмен между всеми ВМЛ ВС.
ОБД выполнен на стандартном долговременном запоминающем устройстве, хранящем данные, поступившие с ПНИД.
В ФНПП осуществляется комплексная обработка информации от КНПС, ОБД и формируются текущие навигационно-пилотажные параметры ЛА, поступающие по МВИО в ФОИ и ФУС.
В ФОИ по данным, полученным по МВИО от ОБД, ФНПП, ФУС и от взаимодействующего оборудования через КИО и ВВУИО, формируются обобщенные мнемокадры функциональной, цифробуквенной информации, совмещенной с представлением многофункционального пульта управления. Сформированные мнемокадры изображений с входа-выхода ФОИ через МВИО, ВВУИО, КИО поступают в МФИ.
В ФУС, на этапе предпосадочного маневрирования по текущим координатам ЛА φЛА, λЛА из ФНПП, курсу ψК и координатам φKu, λKu корабля в момент встречи ЛА и корабля из ППТВ определяют текущие координаты ЛА XЛА, YЛА в системе координат, связанной с началом ВПП, и курс ВПП корабля ψВПП:
ψВПП=ψК-ΔψВПП,
XЛА=Δλ·sinψВПП+Δφ·cosψВПП-ΔXВПП,
YЛА=-Δλ·cosψВПП+Δφ·sinψВПП-ΔYВПП,
где Δφ=(φЛА-φKu)·R, Δλ=(λЛА-λKu)·R·cosφЛА, R - радиус Земли, который с достаточной точностью для рассматриваемой задачи может быть принят равным 6371 км, ΔψВПП - известный угол между продольной осью корабля и направлением ВПП корабля из ОБД, ΔXВПП и ΔYВПП - известные расстояния между точкой, в которой измеряются координаты корабля, и началом ВПП корабля, спроектированные на оси Х, Y из ОБД.
По текущим координатам ЛА, XЛА, YЛА из ФНПП и заданным координатам центра вынесенной окружности относительно начала ВПП Х0=ДВТ, Y0=RЗ, из ОБД определяют заданный курс ЛА ψЗ на точку касания А вынесенной окружности в географической системе координат, который вместе с сигналом истинного курса ЛА ψИ поступает на индикацию и в систему автоматического управления (САУ) ЛА:
 ,
,
где D= - линейная дальность до точки А касания заданной вынесенной окружности, RЗ - постоянный радиус заданной вынесенной окружности, соответствующий заданной скорости ЛА VЗ при выходе в точку А на заданной высоте HЗ, αCH - угол сноса ЛА из ФНПП.
- линейная дальность до точки А касания заданной вынесенной окружности, RЗ - постоянный радиус заданной вынесенной окружности, соответствующий заданной скорости ЛА VЗ при выходе в точку А на заданной высоте HЗ, αCH - угол сноса ЛА из ФНПП.
Для управления в продольной плоскости для индикации и для САУ в ФУС формируется отклонение ЛА от программной высоты ΔH:
ΔH=HЛА-HПР,
где HЛА - текущая высота ЛА из ФНПП, HПР=HЗ+tg·D - программное значение высоты, НЗ и θЗ - соответственно заданное значение высоты ЛА в точке А и заданный угол наклона траектории снижения из ОБД.
В начальный момент функционирования предлагаемого устройства на этапе возврата, координатам φKu, λKu в ППТВ присваивают значения текущих координат корабля φK, λK.
На фиг.3, в предположении равенства нулю угла сноса ЛА αCH, заданный курс, рассчитанный в начальный момент функционирования предлагаемого устройства на этапе возврата, обозначен как ψЗо.
В дальнейшем координаты φKu, λKu, поступающие в ФУС из ППТВ, определяют следующим образом.
В ПВПЛА определяют длину траектории посадки DТП вплоть до касания палубы корабля:
DТП=D+ДВТ+RЗ·(ψВПП-ψЗ).
Используя значения длины траектории посадки DТП, текущей высоты ЛА HЛА, текущей скорости ЛА VЛА, известную из аэродинамики конкретного ЛА зависимость его скорости от высоты в процессе выполнения стандартного предпосадочного маневра, в ПВПЛА определяют среднюю скорость ЛА в процессе посадки VЛАС. Реализация этой операции осуществляется в ПВПЛА табличным методом с линейной аппроксимацией между табличными значениями из ОБД.
Используя длину траектории посадки DТП и среднюю скорость ЛА в процессе посадки VЛАС, в ПВПЛА определяют относительное время посадки ТП:
ТП=DТП/VЛАС.
В ППТВ, используя время посадки ТП и текущие координаты φK, λK, курс ψK, скорость VК корабля, определяют координаты корабля в момент посадки:
φKu=φK+TП·VK·cosψK/R,
λKu=λK+ТП·VK·sinψK/(R·cosφK),
которые на следующем цикле функционирования устройства будут использованы в ФУС в качестве координат корабля.
Таким образом, реализуется итерационный метод определения координат корабля в момент посадки, точность определения которых с каждым циклом решения повышается. Как показывают результаты расчетов и математического моделирования, необходимая, для решения задачи возврата на корабль, точность определения координат корабля в момент посадки достигается на 3-4 итерационном цикле решения задачи.
Отклонение рулевых поверхностей ЛА для маневра в боковой плоскости осуществляется с учетом рассогласования между текущим и заданным курсами и после того, как текущий курс ЛА ψИ сравняется с заданным курсом ψЗ и вектор скорости ЛА будет направлен на точку А, крен ЛА становится равным нулю, и ЛА летит на точку А касания заданной окружности.
Отклонение рулевых поверхностей ЛА для маневра в продольной плоскости осуществляется с учетом отклонение ЛА от программной высоты ΔH.
Таким образом, ЛА летит в точку А касания заданной окружности, вынесенной по оси ВПП относительно прогнозируемого местоположения корабля в момент касания ЛА палубы корабля. После прохождения точки А на высоте HЗ производится разворот ЛА в сторону прогнозируемого положения ВПП корабля, а затем выравнивание ЛА по линии ВПП с курсом, равным курсу ВПП корабля. На этом этап возврата на корабль заканчивается и начинается этап захода на посадку на палубу корабля.
Комплексная система навигации и управления летательного аппарата, содержащая взаимосоединенные входами-выходами по каналу информационного обмена комплект многофункциональных индикаторов, комплект навигационно-пилотажных средств, переносной носитель исходных данных, комплект радиотехнических средств связи, взаимодействующих по эфиру с радиотехнической системой связи авианосца, вычислительную систему, включающую взаимосоединенные входами-выходами по магистрали вычислительного информационного обмена вычислительно-логические модули объединенной базы данных (ОБД), формирования навигационно-пилотажных параметров (ФНПП), формирования отображаемой информации (ФОИ), формирования управляющих сигналов (ФУС), ввода-вывода и управления информационным обменом (ВВУИО), отличающаяся тем, что она дополнительно снабжена введенными в состав вычислительной системы вычислительно-логическими модулями оценки пространственно-временных параметров движения ЛА (ПВПЛА) на возврате и прогноза параметров точки встречи ЛА и корабля (ППТВ), взаимосоединенными между собой и с вычислительно-логическими модулями ОБД, ФНПП, ФОИ, ФУС и ВВУИО по магистрали вычислительного информационного обмена.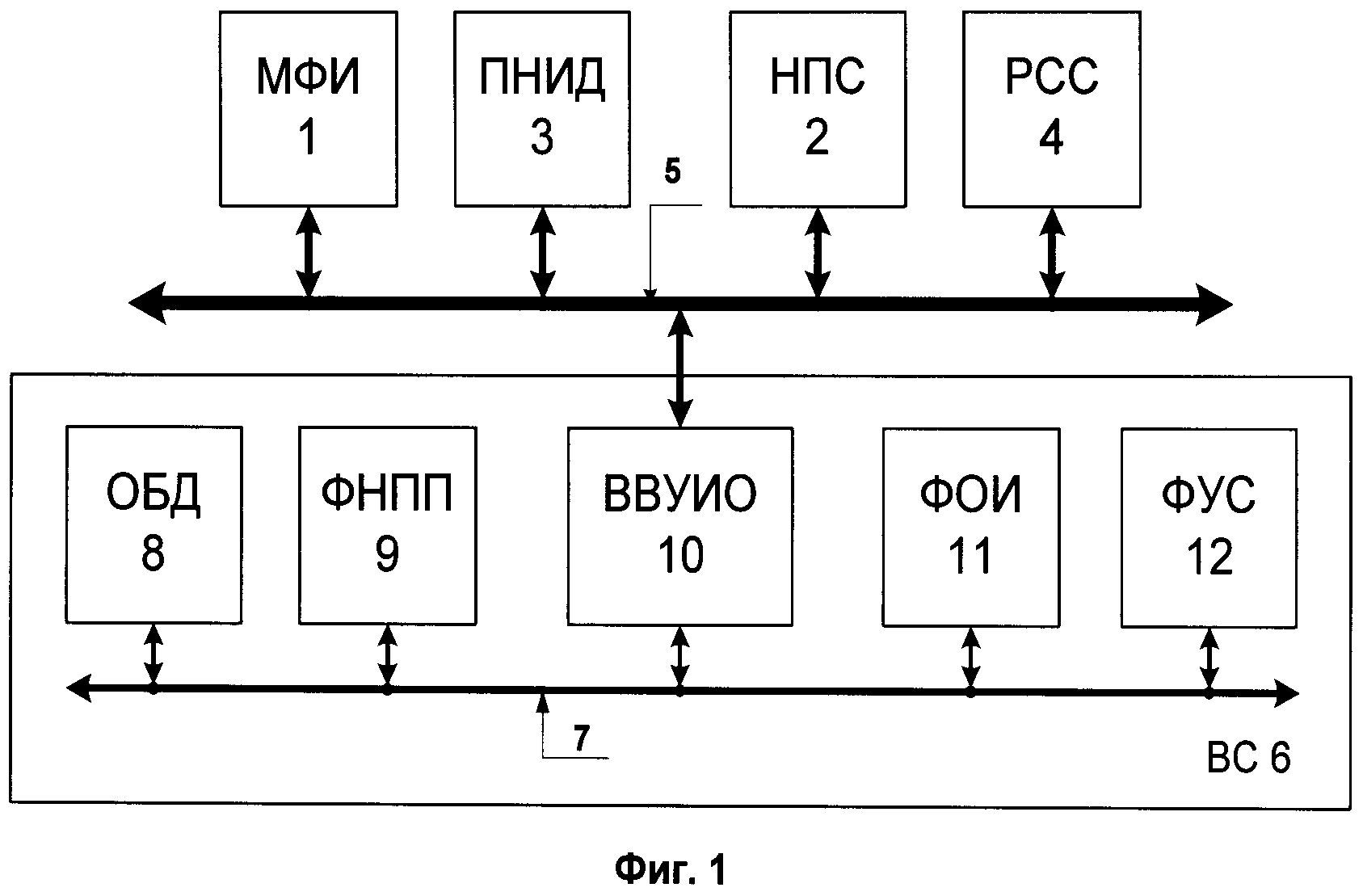
Способ управления летательным аппаратом при возврате на корабль
Комплексная система подготовки и навигации летательного аппарата
Способ термической стабилизации размеров деталей прецизионных приборов из закаленного алюминиевого сплава д20
Устройство формирования управляющих сигналов при снижении
Прицельно-навигационный комплекс оборудования многофункционального самолета
Способ управления летательным аппаратом при возврате на корабль
Комплексная система подготовки и навигации летательного аппарата
Коллиматорный авиационный индикатор
Бортовая цифровая вычислительная машина комплексов управления и навигации летательных аппаратов
Прицельная система летательного аппарата
Система управления и индикации летательного аппарата
Способ оптимального оценивания ошибок инерциальной навигационной системы и её коррекции по неподвижному наземному ориентиру с известными географическими координатами
Защищенный способ оптимальной привязки к подвижной наземной цели

