Результат интеллектуальной деятельности: СПОСОБ ПОДАВЛЕНИЯ УПРУГИХ КОЛЕБАНИЙ КОНСТРУКЦИИ РАКЕТЫ ПАКЕТНОЙ СХЕМЫ
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике, а именно к ракетам космического назначения (РКН) пакетной схемы.
В ракетной технике известны способы подавления упругих колебаний конструкции ракет тандемной компоновки, основанные
- на увеличении рассеивания энергии при упругих колебаниях ([1], стр.157-158);
- на установке дополнительных датчиков линейного или углового ускорения, линейной или угловой скорости и линейного или углового отклонения характерных точек конструкции и использовании их сигналов для фазовой стабилизации упругих колебаний ([1], стр.159, 160);
- на установке на ракете дополнительных органов управления (верньерных двигателей), векторы тяги которых направлены по нормали к оси ракеты, и использовании их для фазовой стабилизации упругих колебаний ([1], стр.159, 160).
Недостатком этих способов является сложность их практической реализации, связанная с необходимостью изменения конструкции ракеты или с применением датчиков, не используемых в настоящее время в ракетной технике.
Известен также способ подавления упругих колебаний конструкции ракеты тандемной компоновки с отклоняемым маршевым двигателем, основанный на использовании амплитудной стабилизации упругих колебаний за счет уменьшения динамического коэффициента усиления автомата стабилизации ([1], стр.157-158). При этом управление отклонением сопла двигателя осуществляется с такой частотой, чтобы упругие колебания не возбуждались ([2], стр.154). Амплитудная стабилизация соответствует работе системы управления без обратной связи на упругих частотах и используется для подавления упругих колебаний на высших тонах ([3], стр.63).
Наиболее близким по технической сущности к предлагаемому изобретению является выбранный в качестве прототипа способ фазовой стабилизации упругих колебаний конструкции ракеты «Сатурн-5», заключающийся в измерении углового положения ракеты с помощью позиционных гироскопов, установленных в трехстепенных подвесах, в измерении угловых скоростей ракеты с помощью скоростных гироскопов, расположенных на корпусе ракеты, в формировании закона управления отклонением двигателя и в повороте двигателя с частотой упругих колебаний в противофазе по отношению к колебаниям корпуса ([3], стр.60, 63, 65).
Недостатком известного способа является его неспособность к подавлению взаимных упругих колебаний блоков в многоблочной ракете пакетной схемы, в частности к подавлению упругих колебаний боковых блоков (ББ) ракеты друг относительно друга и относительно центрального блока (ЦБ). Эти колебания приводят к повышенным нагрузкам на конструкцию ракеты, в частности на узлы связи ББ с ЦБ, и могут быть причиной разрушения конструкции ракеты.
Задачей предложенного изобретения является разработка способа подавления как упругих колебаний ЦБ, так и упругих колебаний ББ относительно ЦБ.
Техническим результатом предлагаемого изобретения является уменьшение нагрузок на конструкцию ракеты и возможность снижения массы конструкции, что позволит увеличить выводимую на орбиту полезную нагрузку и расширить эксплуатационный диапазон ракеты по внешним возмущениям, а также расширение арсенала технических средств, используемых при подавлении колебаний.
Указанный технический результат достигается тем, что в способе подавления упругих колебаний ракеты пакетной схемы, заключающемся в измерении углового положения ракеты с помощью позиционных гироскопов, установленных в трехстепенных подвесах, в измерении угловых скоростей ракеты с помощью скоростных гироскопов, расположенных на корпусе ракеты, в формировании закона управления отклонением сопел двигателей ракеты и в повороте сопел двигателей ракеты с частотой упругих колебаний в противофазе по отношению к колебаниям корпуса ракеты, в соответствии с изобретением, в случае подавления упругих колебаний конструкции многоблочной РКН пакетной схемы измеряют угловые скорости ББ с помощью установленных на них скоростных гироскопов, формируют дополнительные управляющие сигналы на отклонение сопел двигателей ББ и дополнительно отклоняют сопла двигателей симметричных относительно плоскостей тангажа и рыскания ББ на антисимметричные углы в противофазе к колебаниям ББ относительно ЦБ.
Сущность предлагаемого изобретения иллюстрируется фиг.1…5.
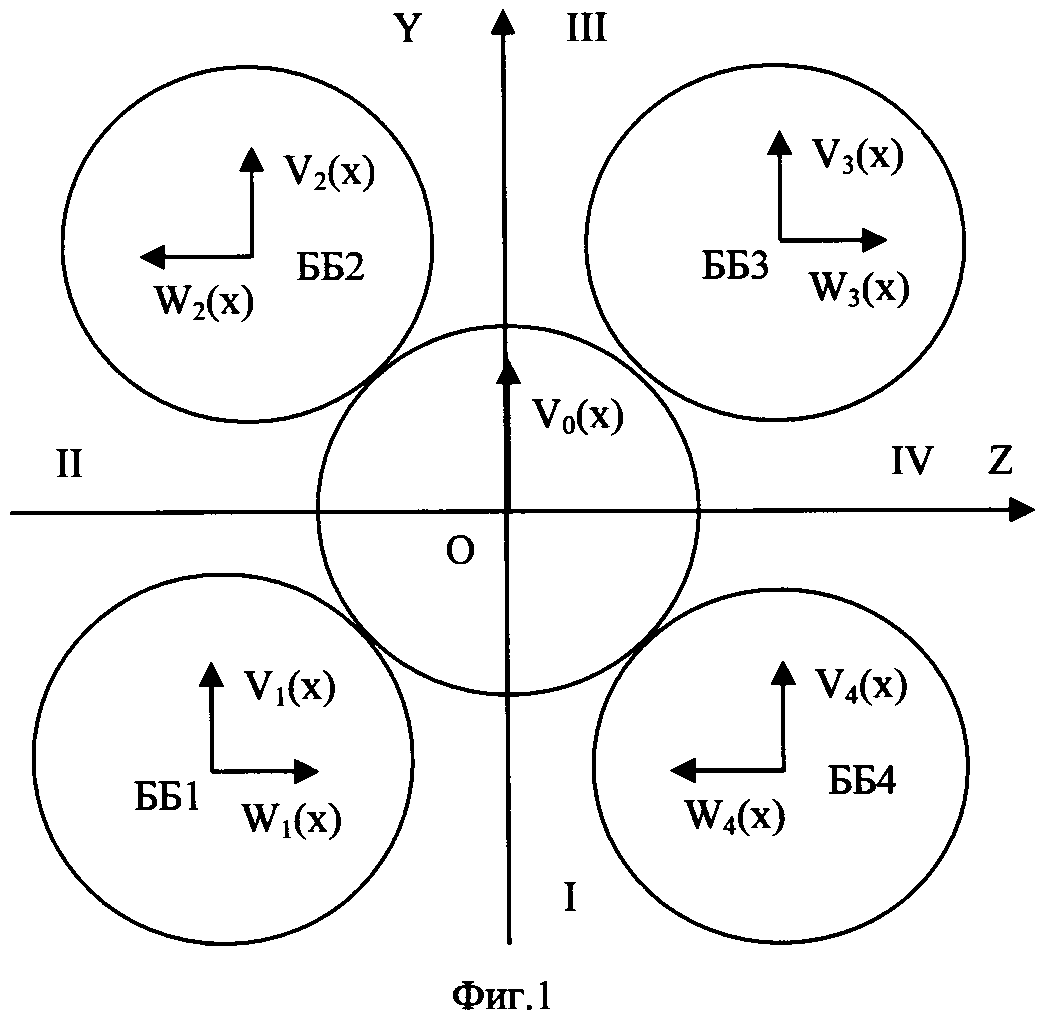
Фиг.1 - схема движения центрального и боковых блоков при упругих колебаниях корпуса РКН по тангажу.
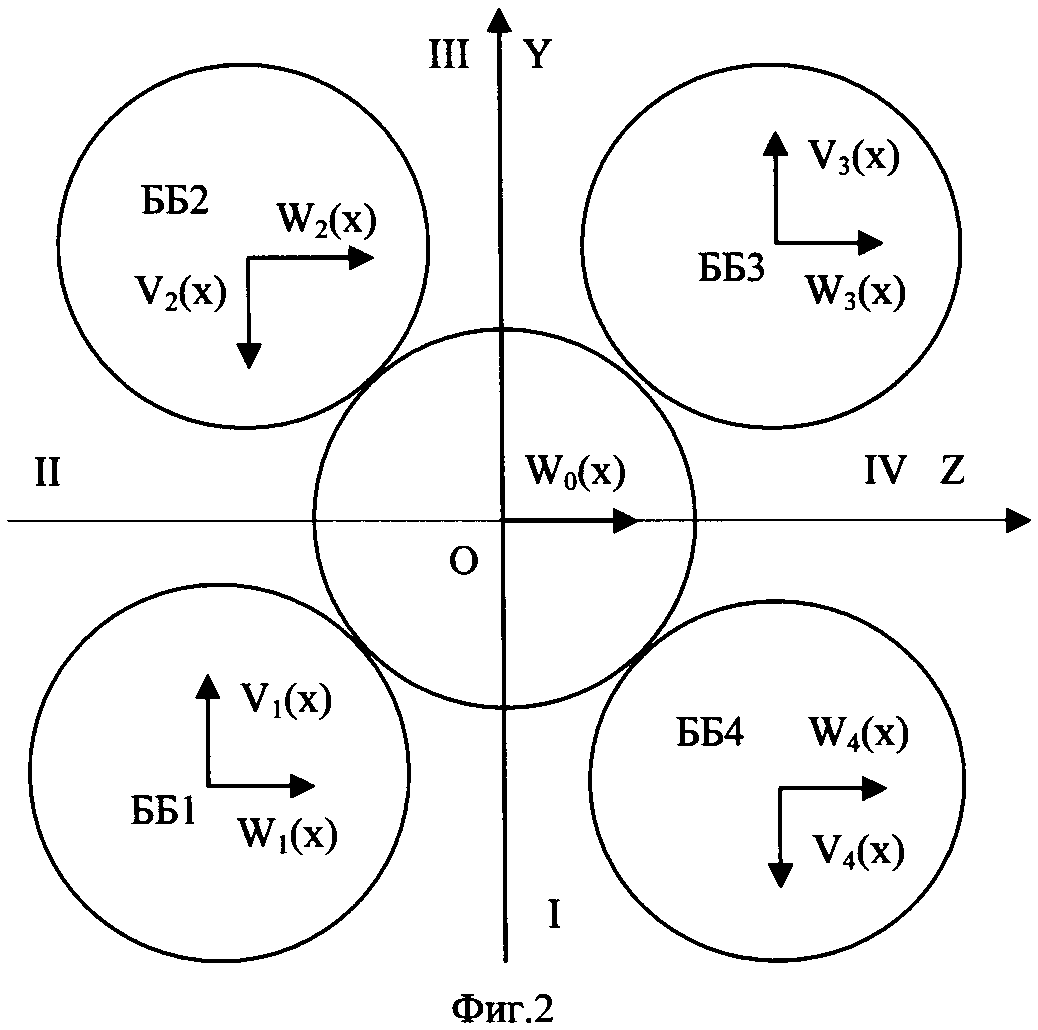
Фиг.2 - схема движения центрального и боковых блоков при упругих колебаниях корпуса РКН по рысканию.
Фиг.3 - схема движения центрального и боковых блоков при упругих колебаниях корпуса РКН по крену.
Фиг.4 - схема движения центрального и боковых блоков при упругих колебаниях типа «бочка» относительно неподвижного центрального блока.
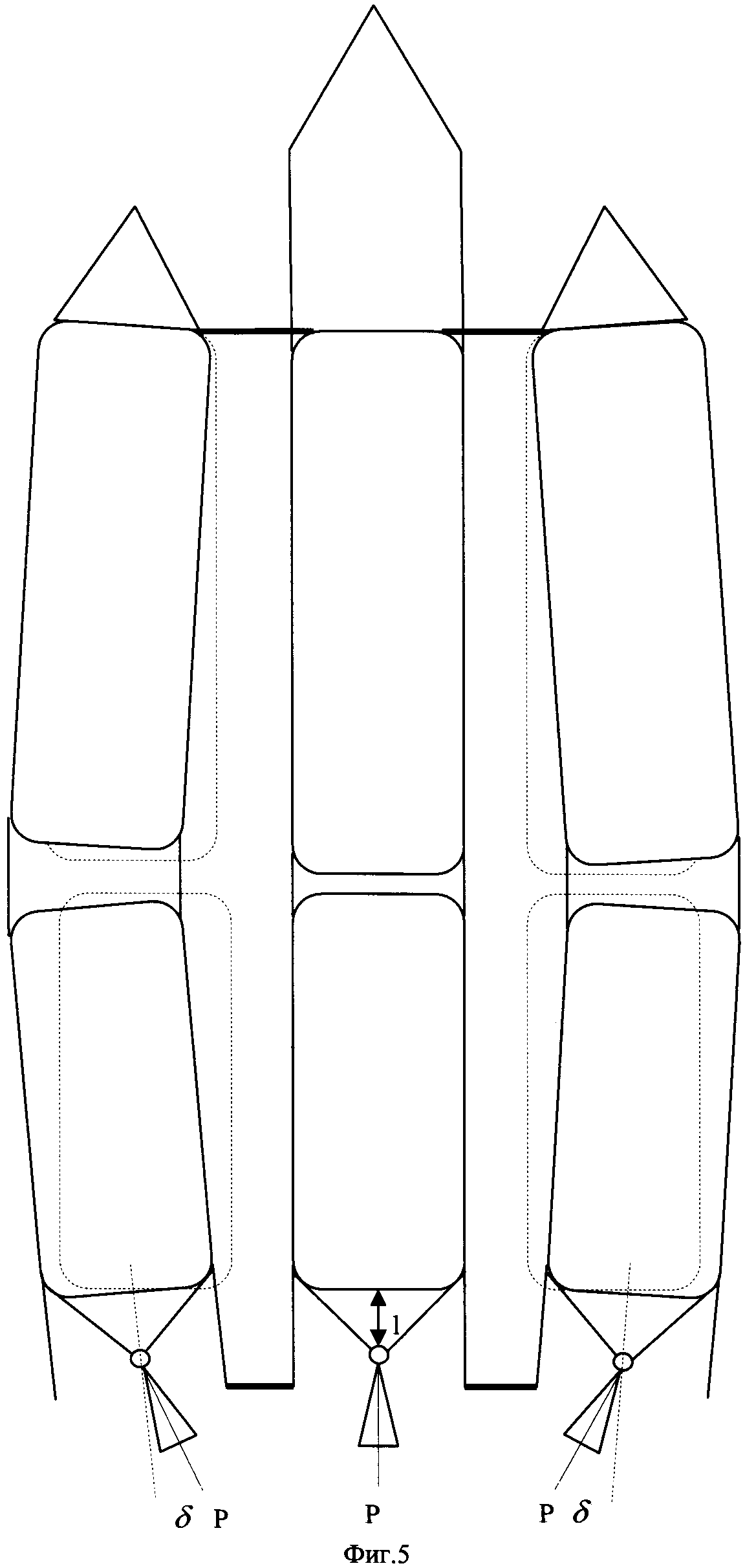
Фиг.5 - дополнительные отклонения сопел двигателей ББ при демпфировании «бочкообразных» колебаний ББ.
Колебания ББ относительно ЦБ в общем случае представляют собой радиальные, тангенциальные, крутильные и продольные перемещения блоков в различных сочетаниях ([4], стр.118-120).
На фиг.1 в качестве примера рассматривается сечение плоскостью, перпендикулярной продольной оси, трехступенчатой РКН, имеющей 4 ББ, расположенных по схеме «X». В рассматриваемом случае РКН имеет модульную конструкцию, в которой I-ую ступень образуют 4 ББ, а II-ую ступень - ЦБ, идентичный по конструкции ББ. Ко II-ой ступени пристыкованы III-я ступень, разгонный блок и космическая головная часть. Двигатель каждого блока (ЦБ и ББ) может отклоняться от продольной оси блока в двух направлениях - по осям OY и OZ. Стрелками показаны направления перемещения сечений ЦБ и ББ в некоторый фиксированный момент времени при колебаниях по первому тону в плоскости тангажа. Около стрелок указаны обозначения соответствующих форм первого тона упругих колебаний в рассматриваемом сечении с продольной координатой x (начало системы координат - в точке пересечения продольной оси РКН с плоскостью срезов сопел): V0(x) - форма перемещения ЦБ в направлении оси OY; Vi(x) - форма перемещения ББ с номером i=1, …, 4 в направлении оси OY; Wi(x) - форма перемещения ББ с номером i=1, …, 4 в направлении оси OZ. Истинные перемещения блоков в рассматриваемом сечении равны соответственно V0(x)q(t), Vi(x)q(t), Wi(x)q(t), где q(t) - обобщенная переменная первого тона упругих колебаний, характеризующая упругие колебания РКН по тангажу во времени.
На фиг.2 и 3 показаны аналогичные перемещения блоков при колебаниях РКН по рысканию и крену соответственно, а на фиг.4 - при «бочкообразных» колебаниях ББ и неподвижном ЦБ.
В рассматриваемом примере датчики угловых скоростей (ДУС) (скоростные гироскопы) находятся в межбаковом отсеке ЦБ и носовых отсеках или хвостовых отсеках ББ (в сечениях РКН, имеющих продольную координату  . На корпусе каждого блока установлено по 2 ДУС, измеряющих проекции вектора угловой скорости РКН на поперечные оси OZ и OY. С учетом упругих колебаний, совершаемых конструкцией РКН, показания ДУС i-го блока соответственно равны:
. На корпусе каждого блока установлено по 2 ДУС, измеряющих проекции вектора угловой скорости РКН на поперечные оси OZ и OY. С учетом упругих колебаний, совершаемых конструкцией РКН, показания ДУС i-го блока соответственно равны:

Здесь ϑ - угол тангажа, ψ - угол рыскания, точка означает производную по времени, штрих - производную по продольной координате х, индекс 0 относится к ЦБ. Для простоты учитывается влияние только первых тонов колебаний в плоскостях тангажа и рыскания.
В рассматриваемом примере датчики углового положения установлены на осях карданова подвеса трехстепенной гиростабилизированной платформы (ГСП), расположенной на III-й ступени РКН. С помощью этих датчиков измеряют углы тангажа, рыскания и крена, определяющие угловое положение ракеты. После преобразования в БЦВМ показаний этих датчиков в автомат стабилизации поступают сигналы, равные отклонениям от программных значений углов тангажа и рыскания (с учетом упругих колебаний корпуса ракеты в месте установки ГСП):


Путем численного дифференцирования в БЦВМ формируются значения угловых скоростей  и
и 
Разности сигналов  и
и  содержат информацию о форме упругой линии РКН (мгновенного положения ее продольной оси). С использованием этих сигналов формируют закон управления отклонением сопел двигателей ЦБ и ББ для подавления поперечных упругих колебаний конструкции так, как это делается в способе-прототипе. При этом на отклонение сопел всех двигателей ЦБ и ББ подается единый управляющий сигнал, который на частоте первого тона упругих колебаний отклоняет сопла двигателей в противофазе к колебаниям упругой линии («разгибая» упругую линию). Таким образом подавляются упругие колебания ЦБ и подобные им колебания ББ. Например, при колебаниях ЦБ по тангажу (см. фиг.1) подавляются колебания, имеющие формы V0(x) ЦБ и подобные им формы Vi(x) (i=1, …, 4).
содержат информацию о форме упругой линии РКН (мгновенного положения ее продольной оси). С использованием этих сигналов формируют закон управления отклонением сопел двигателей ЦБ и ББ для подавления поперечных упругих колебаний конструкции так, как это делается в способе-прототипе. При этом на отклонение сопел всех двигателей ЦБ и ББ подается единый управляющий сигнал, который на частоте первого тона упругих колебаний отклоняет сопла двигателей в противофазе к колебаниям упругой линии («разгибая» упругую линию). Таким образом подавляются упругие колебания ЦБ и подобные им колебания ББ. Например, при колебаниях ЦБ по тангажу (см. фиг.1) подавляются колебания, имеющие формы V0(x) ЦБ и подобные им формы Vi(x) (i=1, …, 4).
Предлагаемый способ по сравнению с прототипом дополнительно подавляет колебания ББ, плоскость которых не совпадает с плоскостью колебаний ЦБ. Например, при колебаниях ЦБ по тангажу (см. фиг.1) предлагаемый способ подавляет колебания ББ относительно ЦБ, имеющие формы Wi(x) (i=1, …, 4). Кроме того, в отличие от прототипа, предлагаемый способ подавляет «бочкообразные» колебания ББ относительно ЦБ (см. фиг.4). Для этого в автомате стабилизации РКН формируются разности сигналов


содержащие информацию о колебаниях ББ относительно ЦБ, на основании которой автомат стабилизации формирует дополнительные управляющие сигналы на отклонение сопел двигателей ББ, гасящие колебания ББ. При этом сопла двигателей, симметричных относительно плоскости тангажа ББ (например, ББ2 и ББ3), отклоняются на антисимметричные углы (т.е. либо навстречу друг другу, либо в противоположные друг от друга стороны) так, чтобы дополнительное отклонение сопел не влияло на движение РКН как твердого тела.
Оценим величину действующего на корпус ББ момента силы тяги двигателя ББ, создаваемого за счет дополнительного отклонения его сопла, в сечении шпангоута, к которому крепится рама двигателя. Этот момент равен М=Plsinδ, где P - тяга двигателя, l - плечо действия силы, δ - дополнительный угол отклонения сопла двигателя ББ (см. фиг.5). Для рассматриваемого примера P≈200 тс, l≈1,6 м. Приняв δ=1°, получим M≈5,6 тс м. Такая величина момента может предотвратить нарастание до опасных значений амплитуды колебаний ББ относительно ЦБ.
В случае, если колебания ББ относительно ЦБ малы и не представляют опасности для РКН, дополнительные отклонения сопел двигателей ББ близки к 0 и предлагаемый способ подавления упругих колебаний работает практически также, как и способ-прототип.
Источники информации
1. К.С.Колесников. Динамика ракет. М.: «Машиностроение». 1980 г.
2. Динамика систем управления ракет с бортовыми цифровыми вычислительными машинами. Под ред. М.С.Хитрика и С.М.Федорова. М., Изд. «Машиностроение», 1976 г.
3. Ловингуд, Гейслер. Управление полетом ракет-носителей «Сатурн». Вопросы ракетной техники, №12, 1966 г., издательство «Мир».
4. Л.В.Докучаев, О.В.Соболев. Совершенствование методов исследований динамики ракеты-носителя пакетной конструкции с учетом ее симметрии. «Космонавтика и ракетостроение», 2005 г., №2 (39), стр.112-121.
Способ подавления упругих колебаний конструкции ракеты пакетной схемы, заключающийся в измерении углового положения ракеты с помощью позиционных гироскопов, установленных в трехстепенных подвесах, в измерении угловых скоростей ракеты с помощью скоростных гироскопов, расположенных на корпусе ракеты, в формировании закона управления отклонением сопел двигателей ракеты и в повороте сопел двигателей ракеты с частотой упругих колебаний в противофазе по отношению к колебаниям корпуса ракеты, отличающийся тем, что в случае подавления упругих колебаний конструкции многоблочной ракеты космического назначения пакетной схемы измеряют угловые скорости боковых блоков с помощью установленных на них скоростных гироскопов, формируют дополнительные управляющие сигналы на отклонение сопел двигателей боковых блоков и дополнительно отклоняют сопла двигателей симметричных относительно плоскостей тангажа и рыскания боковых блоков на антисимметричные углы в противофазе к колебаниям боковых блоков относительно центрального блока.
Переносной герметичный контейнер
Устройство для сварки трением с перемешиванием полых трубчатых изделий
Сопловой аппарат активной турбины
Способ получения восстановительного газа
Способ стабилизации структурно неустойчивого осциллятора жидкости разгонных блоков и верхних ступеней ракет-носителей
Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей
Способ управления программным разворотом разгонного блока
Способ автономной навигации для объекта космического назначения

