Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления вождением и к оборудованию управления вождением.
Уровень техники
[0002] Известен способ, в котором когда выполняется определение в отношении того, что информация полос движения становится недоступной или ненадежной, расстояние от находящегося в соседней полосе движения транспортного средства отслеживается с использованием датчика, и расстояние поддерживается меньше предварительно определенного значения (патентный документ 1: Перевод на японский язык международной PCT–заявки № 2015–523256).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1.
Перевод на японский язык международной PCT–заявки № 2015–523256
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, вышеприведенный предшествующий уровень техники имеет проблему в том, что автономное/автоматизированное вождение не может продолжаться в зависимости от ситуации, поскольку расстояние от другого транспортного средства управляется, когда выполняется определение в отношении того, что точность картографической информации, включающей в себя полосы движения, является низкой.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы достигать продолжения автономного вождения даже при движении в области, в которой точность картографической информации является низкой.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством понижения уровня управления автономного вождения при движении в области, в которой точность картографической информации является низкой.
Преимущества изобретения
[0007] Согласно настоящему изобретению, автономное/автоматизированное вождение может продолжаться даже при движении в области, в которой точность картографической информации является низкой.
Краткое описание чертежей
[0008] Фиг. 1 является блок–схемой конфигурации системы управления вождением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является схемой для описания примера картографической информации согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 3 является схемой, иллюстрирующей форму картографической информации согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4 является схемой для описания высокоуровневого управления вождением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 5 является блок–схемой последовательности операций способа, иллюстрирующей процедуру управления вождением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 6 является диаграммой для описания процесса переключения управления вождением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 7 является диаграммой для описания процесса подготовки к переключению управления вождением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 8 является схемой для описания процесса подготовки к переключению управления вождением согласно одному или более вариантов осуществления настоящего изобретения.
Оптимальный режим осуществления изобретения
[0009] Далее описываются один или более вариантов осуществления настоящего изобретения со ссылкой на чертежи. В вариантах осуществления, настоящее изобретение описывается посредством примерной иллюстрации случая, в котором оборудование управления вождением для транспортного средства согласно настоящему изобретению применяется к системе управления вождением, оборудованной в транспортном средстве. Варианты осуществления оборудования управления вождением согласно настоящему изобретению не ограничены и также могут применяться к портативному терминальному устройству, которое может обмениваться информацией со стороной транспортного средства. Оборудование управления вождением, система управления вождением и портативное терминальное устройство представляют собой компьютер, который выполняет процессы вычисления.
[0010] Фиг. 1 является схемой, иллюстрирующей блочную конфигурацию системы 1 управления вождением согласно одному или более вариантов осуществления настоящего изобретения. Система 1 управления вождением включает в себя оборудование 100 управления вождением и бортовое оборудование 200. Оборудование 100 управления вождением и бортовое оборудование 200 согласно одному или более вариантов осуществления настоящего изобретения имеют устройства 20 и 40 связи, соответственно, и обмениваются информацией между собой через проводную или беспроводную связь.
[0011] Сначала описывается бортовое оборудование 200.
Бортовое оборудование 200 согласно одному или более вариантов осуществления настоящего изобретения включает в себя устройство 50 обнаружения, датчик 60, контроллер 70 транспортного средства, устройство 80 приведения в движение, устройство 90 рулевого управления, устройство 110 вывода и навигационное устройство 120. Эти устройства, которые составляют бортовое оборудование 200, соединяются между собой через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией.
[0012] Ниже описываются эти устройства, которые составляют бортовое оборудование 200.
Устройство 50 обнаружения обнаруживает существование объекта, такого как другое транспортное средство, и его позицию присутствия. Устройство 50 обнаружения согласно одному или более вариантов осуществления настоящего изобретения включает в себя, но не только, камеру 51. Камера 51 согласно одному или более вариантов осуществления настоящего изобретения представляет собой, например, камеру, которая включает в себя элемент формирования изображений, такой как CCD. Камера 51 согласно одному или более вариантов осуществления настоящего изобретения, которая устанавливается в рассматриваемом транспортном средстве, захватывает изображения вокруг рассматриваемого транспортного средства и получает данные изображений, которые включают в себя объектные транспортные средства, присутствующие вокруг рассматриваемого транспортного средства.
[0013] Камера 51 согласно одному или более вариантов осуществления настоящего изобретения присоединена к задней части рассматриваемого транспортного средства в позиции высоты h таким образом, что оптическая ось имеет угол θ вниз от горизонтального направления. Камера 51 захватывает изображения определенной области позади рассматриваемого транспортного средства V1 из этой позиции при предварительно определенном углу Q обзора. Угол Q обзора камеры 51 задается равным углу, который обеспечивает возможность формирования изображений не только полосы движения, в которой движется рассматриваемое транспортное средство, но также и правой и левой полос движения. Изображения, захваченные посредством камеры 51, включают в себя изображения, захваченные позади рассматриваемого транспортного средства.
[0014] Устройство 50 обнаружения обрабатывает полученные данные изображений, чтобы вычислять позицию объекта относительно рассматриваемого транспортного средства или расстояние от объекта до рассматриваемого транспортного средства. Устройство 50 обнаружения вычисляет относительную скорость и относительное ускорение между рассматриваемым транспортным средством и объектом из варьирования во времени позиции объекта. Что касается процесса вычисления относительного расположения между рассматриваемым транспортным средством и другим транспортным средством на основе данных изображений, и процесса вычисления информации скорости на основе величины варьирования во времени относительного расположения, может надлежащим образом использоваться любой способ, известный на момент подачи настоящей заявки.
[0015] Помимо этого или альтернативно, устройство 50 обнаружения согласно одному или более вариантов осуществления настоящего изобретения может включать в себя радарное устройство 52. Примеры радарного устройства 52 могут представлять собой такие примеры, как радар миллиметрового диапазона, лазерный радар и сверхзвуковой радар, которые известны на момент подачи заявки настоящей заявки.
[0016] Датчик 60 согласно одному или более вариантов осуществления настоящего изобретения включает датчик 61 угла поворота при рулении и датчик 62 скорости транспортного средства. Датчик 61 угла поворота при рулении обнаруживает информацию руления, такую как величина руления, скорость руления и ускорение при рулении рассматриваемого транспортного средства, и отправляет информацию руления в контроллер 70 транспортного средства и оборудование 100 управления вождением. Датчик 62 скорости транспортного средства определяет скорость и ускорение рассматриваемого транспортного средства и отправляет их в контроллер 70 транспортного средства и оборудование 100 управления вождением.
[0017] Контроллер 70 транспортного средства согласно одному или более вариантов осуществления настоящего изобретения представляет собой бортовой компьютер, к примеру, электрический модуль управления (ECU), и электронно управляет состоянием приведения в движение транспортного средства. Транспортное средство согласно одному или более вариантов осуществления настоящего изобретения может представлять собой, например, электромобиль, имеющий электромотор в качестве источника приведения в движение, автомобиль с двигателем, имеющий двигатель внутреннего сгорания в качестве источника приведения в движение, или гибридный автомобиль, имеющий как электромотор, так и двигатель внутреннего сгорания в качестве источников приведения в движение. Примеры электромобиля и гибридного автомобиля, имеющего электромотор в качестве источника приведения в движение, включают в себя тип, в котором источник мощности для электромотора представляет собой аккумуляторную батарею, и тип, в котором источник мощности для электромотора представляет собой топливный элемент.
[0018] Устройство 80 приведения в движение согласно одному или более вариантов осуществления настоящего изобретения включает в себя приводной механизм рассматриваемого транспортного средства V1. Приводной механизм включает в себя электромотор и/или двигатель внутреннего сгорания в качестве вышеописанных источников приведения в движение, устройство передачи мощности, включающее в себя ведущий вал и автоматическую трансмиссию, которые передают выходную мощность источников приведения в движение на ведущие колеса, и тормозное устройство 81, которое тормозит колеса. Устройство 80 приведения в движение формирует соответствующие управляющие сигналы для этих компонентов приводного механизма и выполняет управление вождением, включающее в себя ускорение и замедление транспортного средства. Эти управляющие сигналы для приводного механизма формируются на основе входных сигналов посредством операции нажатия педали акселератора и операции нажатия педали тормоза водителя и управляющих сигналов, полученных из контроллера 70 транспортного средства или из оборудования 100 управления вождением. Управляющая информация может отправляться в устройство 80 приведения в движение, которое ввиду этого может выполнять управление вождением, включающее в себя ускорение и замедление транспортного средства, автоматизированным или автономным способом. В случае гибридного автомобиля, устройство 80 приведения в движение может принимать отношение крутящего момента, выводимого в электромотор, и крутящего момента, выводимого в двигатель внутреннего сгорания, в соответствии с состоянием движения транспортного средства.
[0019] При получении управляющей информации из устройства 10 управления, контроллер 70 транспортного средства управляет устройством 80 приведения в движение и устройством 90 рулевого управления таким образом, что рассматриваемое транспортное средство V1 движется по целевому намеченному пути. Контроллер 70 транспортного средства управляет устройством рулевого управления 90 с использованием формы дороги, обнаруженной посредством устройства 50 обнаружения, информации дороги из навигационного устройства 120 и модели разделительных линий, сохраненной в картографической информации 300 таким образом, что рассматриваемое транспортное средство движется при поддержании определенной поперечной позиции относительно полосы движения. Устройство 90 рулевого управления согласно одному или более вариантов осуществления настоящего изобретения включает в себя исполнительное устройство рулевого управления. Исполнительное устройство рулевого управления включает в себя электромотор и другие обязательные компоненты, присоединенные к валу рулевой колонки. Устройство 90 рулевого управления выполняет управление рулением для транспортного средства на основе управляющего сигнала, полученного из контроллера 70 транспортного средства, или входного сигнала посредством операции руления водителя. Контроллер 70 транспортного средства вычисляет величину управления рулением на основе информации относительно угла поворота при рулении, полученной из датчика 61 угла поворота при рулении, скорости транспортного средства, полученной из датчика 62 скорости транспортного средства, и тока исполнительного устройства рулевого управления и отправляет команду управления током в исполнительное устройство рулевого управления, чтобы за счет этого выполнять управление таким образом, что рассматриваемое транспортное средство движется в целевой поперечной позиции. Способ управления поперечной позицией рассматриваемого транспортного средства V1 не ограничен использованием вышеописанного устройства 90 рулевого управления. Помимо этого или альтернативно, устройство 80 приведения в движение и/или тормозное устройство 81 могут использоваться для того, чтобы управлять направлением движения (т.е. поперечной позицией) рассматриваемого транспортного средства V1 на основе разности частот вращения между правым и левым ведущими колесами. В этом смысле, "руление" транспортного средства имеет намерение охватывать случаи использования устройства 80 приведения в движение и/или тормозного устройства 81 в дополнение к случаям использования устройства 90 рулевого управления.
[0020] Навигационное устройство 120 согласно одному или более вариантов осуществления настоящего изобретения вычисляет намеченный путь из текущей позиции рассматриваемого транспортного средства в пункт назначения и выводит информацию направления вдоль намеченного пути через устройство 110 вывода, которое описывается ниже. Навигационное устройство 120 включает в себя устройство 121 обнаружения позиции и картографическую информацию 300, которая является считываемой. Устройство 121 обнаружения позиции взаимодействует с глобальной системой позиционирования (GPS) и обнаруживает позицию (широту/долготу), в которой движется транспортное средство. Навигационное устройство 120 обращается к картографической информации 300, чтобы указывать соединение дорог, в котором движется рассматриваемое транспортное средство, на основе текущей позиции рассматриваемого транспортного средства, обнаруженной посредством устройства 121 обнаружения позиции.
Картографическая информация 300 навигационного устройства 120 является аналогичной картографической информации 300, находящейся в распоряжении оборудования 100 управления вождением, которое описывается ниже. Картографическая информация 300 может предоставляться в навигационном устройстве 120 и также может предоставляться в оборудовании 100 управления вождением. Ниже описывается картографическая информация 300.
[0021] Ниже описывается оборудование 100 управления вождением согласно одному или более вариантов осуществления настоящего изобретения.
Как проиллюстрировано на фиг. 1, оборудование 100 управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя устройство 10 управления, устройство 20 связи и устройство 30 вывода. Устройство 20 связи обменивается информацией с бортовым оборудованием 200.
[0022] Оборудование 100 управления вождением выполняет управление, чтобы помогать в операции вождения водителя. Устройство 10 управления помогает в операции руления водителя. Устройство 10 управления вычисляет величину перемещения и/или скорость перемещения в поперечном направлении (в направлении ширины транспортного средства) на основе намеченного пути и помогает при управлении устройством 90 рулевого управления на основе угла поворота при рулении, соответствующего величине перемещения. Устройство 10 управления также помогает в операции нажатия педали акселератора и операции нажатия педали тормоза водителя. Устройство 10 управления вычисляет величину перемещения и/или скорость перемещения в продольном направлении (в направлении длины транспортного средства) и помогает при управлении устройством 80 приведения в движение и/или тормозным устройством 81 в соответствии с величиной перемещения и/или скоростью перемещения.
[0023] Устройство 10 управления оборудования 100 управления вождением представляет собой компьютер, включающий в себя постоянное запоминающее устройство 12 (ROM), которое сохраняет программы для выполнения управления вождением рассматриваемого транспортного средства, центральный процессор 11 (CPU) в качестве функциональной схемы, которая выполняет программы, сохраненные в ROM 12, так что он служит в качестве оборудования 100 управления вождением, и оперативное запоминающее устройство 13 (RAM), которое служит в качестве доступного устройства хранения данных. Устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения выполняет каждую функцию посредством взаимодействия программного обеспечения для реализации вышеуказанных функций и вышеописанных аппаратных средств.
[0024] Устройство 10 управления оборудования 100 управления вождением включает в себя картографическую информацию 300.
В дальнейшем описывается картографическая информация 300 согласно одному или более вариантов осуществления настоящего изобретения.
Картографическая информация 300 включает в себя первую карту MP1 и вторую карту MP2. Первая карта MP1 представляет собой карту с большей точностью, чем точность второй карты MP2. Первая карта MP1 включает в себя идентификационную информацию полосы движения, и вторая карта MP2 не включает в себя идентификационную информацию полосы движения.
[0025] Фиг. 2 перечисляет контент информации первой карты MP1 и второй карты MP2 и контент управления вождением, которое может достигаться при использовании контента информации. Первая карта MP1 включает в себя информацию границ, которая указывает область первой карты MP1. С использованием этой информации границ, определение может выполняться в отношении того, принадлежит либо нет текущая позиция или каждая точка вдоль намеченного пути области первой карты MP1. Если граница между первой областью и второй областью четко не задается, граница может задаваться посредством типов дорог для магистральных дорог и городских дорог. В варианте осуществления, магистральные дороги могут задаваться в первой области, в то время как другие городские дороги могут задаваться во второй области. Это обусловлено тем, что имеется очень высокая вероятность того, что первая карта MP1 создана для магистральных дорог. В структуре картографической информации 300, первая карта MP1 включает в себя географическую информацию, которая содержит дороги, принадлежащие первой области, в то время как вторая карта MP2 включает в себя географическую информацию, которая содержит дороги, принадлежащие общей области, включающей в себя первую область и вторую область. Когда первая карта MP1 существует для первой области, картографическая информация области второй карты MP2, соответствующей первой области, не используется, и используется только картографическая информация второй области, отличной от первой области. Когда вторая карта MP2 существует для первой области, можно использовать вторую карту MP2 первой области.
Первая карта MP1 имеет двумерную информацию и трехмерную информацию. Первая карта MP1 имеет информацию дороги, информацию атрибутов дороги и информацию направленности вверх/направленности вниз дорог. Первая карта MP1 имеет идентификационную информацию для указания каждой одной полосы движения и информацию полосы движения назначения присоединения для идентификации полосы движения, с которой соединяется каждая полоса движения. Идентификационная информация для идентификации полосы движения обеспечивает возможность устройству 10 управления прогнозировать полосу движения для движения в будущем.
[0026] Управление вождением основано на процессах распознавания, определения и работы. Процесс распознавания может использовать не только картографическую информацию, но также и информацию по обнаружению из камеры, радарного датчика, датчика ориентации или другого аналогичного датчика, но точность картографической информации затрагивают точность процесса распознавания.
Чтобы выполнять высокоуровневое автоматизированное или автономное вождение таким образом, что транспортное средство движется вдоль намеченного пути автоматизированным или автономным способом без необходимости операции человеком, требуется точное распознавание полосы движения для движения транспортного средства в будущем. Чтобы точно выполнять прямое прогнозирование (распознавание), которое обеспечивает возможность автономного/автоматизированного вождения, требуется высокоточная цифровая картографическая информация (высокоточная карта, динамическая карта). Другими словами, чтобы выполнять автономное вождение на высоком уровне, требуется первая карта MP1, с помощью которой может идентифицироваться, по меньшей мере, полоса движения.
[0027] Термин "автономное (автоматизированное или автономное) вождение" имеет широкий смысл. "Автономное вождение" означает различные уровни от уровня автономного вождения, на котором водитель временно освобожден от операции руления, до уровня автономного вождения, на котором транспортное средство перемещается в пункт назначения автономным способом, даже когда водитель или пассажир вообще не выполняет операцию вождения (полностью автономное вождение). В настоящем описании, управление вождением, при котором водитель временно освобожден от операции руления, или водитель освобожден от операции руления в определенной области движения, задается как низкий уровень автономного вождения, и управление вождением, при котором транспортное средство перемещается в пункт назначения автономным способом, даже когда вообще водитель или пассажир не выполняет операцию вождения, задается как самый верхний уровень автономного вождения. Чем меньше операций требуется от водителя или пассажира, тем, согласно определению, более высоким является уровень автономного вождения.
[0028] Контент управления вождением и уровней автономного вождения перечислен на фиг. 2. Примеры управления вождением с высоким уровнем автономного вождения включают в себя 1) управление вождением на перекрестках, 2) управление вождением на слияниях/разветвлениях и 3) управление вождением при смене полосы движения. Такое управление вождением с высоким уровнем автономного вождения (необходимость определения человеком является низкой) требует высокого уровня распознавания. Соответственно, такое управление вождением требует первой карты MP1, которая представляет собой высокоточную картографическую информацию.
Фиг. 2 дополнительно перечисляет 4) управление вождением при удержании на полосе движения в качестве управления вождением с низким уровнем автономного вождения. Управление вождением при удержании на полосе движения заключается в том, чтобы управлять поперечной позицией транспортного средства таким образом, чтобы не отклоняться от текущей полосы движения. Это управление вождением не требует такого уровня распознавания, чтобы точно оценивать ситуацию впереди для движения транспортного средства в будущем. Это управление вождением ввиду этого может выполняться с использованием второй карты MP2 без необходимости первой карты MP1, которая представляет собой высокоточную картографическую информацию. Управление 5) для выполнения помощи при вождении водителем заключается в том, чтобы помогать при операции водителя, и основано на допущении операции водителя. Оно может позиционироваться в качестве управления вождением с самым низким уровнем автономного вождения.
[0029] Первое управление вождением, выполняемое с использованием первой карты MP1, включает в себя управление вождением при смене полосы движения посредством автономного вождения, которое использует результат прогнозирования полосы движения в направлении движения транспортного средства, в то время как второе управление вождением не включает в себя управление вождением при смене полосы движения. Первая карта MP1 и контент первого управления вождением ассоциированы друг с другом, и вторая карта MP2 и контент второго управления вождением ассоциированы друг с другом; ввиду этого управление вождением может выполняться с разными уровнями автономного вождения в соответствии с изменением карты, к которой следует обращаться. Первое управление вождением может включать в себя управление вождением при смене полосы движения, управление вождением на слияниях/разветвлениях и управление вождением для проезда через перекресток. Если обобщить, первое управление вождением может включать в себя любое одно или более из управления вождением при смене полосы движения, управления вождением на слияниях/разветвлениях и управления вождением для проезда через перекресток. Второе управление вождением может включать в себя управление для движения с постоянной скоростью, управление вождением для поддержания расстояния между транспортными средствами, управление вождением для следования за едущим впереди транспортным средством и другое аналогичное управление вождением. Следует понимать, что они также могут выполняться в качестве первого управления вождением.
При автономном вождении, устройство 10 управления оценивает позицию транспортного средства с использованием первой карты MP1, которая представляет собой высокоточную карту, включающую в себя, по меньшей мере, идентификационную информацию для каждой полосы движения, определяет полосу движения для транспортного средства и будущую полосу движения для транспортного средства, определяет ситуацию помех и путей движения в полосе движения и управляет поперечной позицией транспортного средства (рулением/величиной руления/скоростью руления) и продольной позицией транспортного средства (работой/рабочей величиной/рабочей скоростью акселератора/тормоза) в соответствии с ситуацией, чтобы за счет этого выполнять автономное вождение.
[0030] Чтобы выполнять управление вождением для перемещения из текущей полосы движения в смежную полосу движения или поворота направо или налево из текущей полосы движения, необходимо прогнозировать полосу движения для движения рассматриваемого транспортного средства в будущем и распознавать взаимосвязь присоединений между полосами движения. Посредством использования первой карты MP1, включающей в себя информацию для идентификации каждой полосы движения, можно точно прогнозировать полосу движения для движения рассматриваемого транспортного средства в будущем. Чтобы осуществлять вождение по намеченному пути в пункт назначения автономным способом, т.е. выполнять смену полосы движения, проезд через перекресток и/или проезд через точку слияния/разветвления для движения по направлению к пункту назначения посредством автономного вождения, полоса движения для движения рассматриваемого транспортного средства в будущем должна идентифицироваться. Для выполнения плана вождения посредством устройства 10 управления посредством автономного вождения, может быть необходимым точно распознавать полосу движения для движения в будущем, что требует первой карты MP1, включающей в себя идентификационную информацию каждой полосы движения.
[0031] С другой стороны, управление вождением при удержании на полосе движения (при недопущении выезда за пределы полосы движения) выполняется при условии, что полоса движения, в которой рассматриваемое транспортное средство движется в данный момент или двигалось непосредственно перед этим, может идентифицироваться, к примеру, с использованием захваченных изображений. Чтобы выполнять управление вождением при удержании на полосе движения, может быть достаточным идентифицировать дорогу, включающую в себя множество полос движения. Управление вождением при удержании на полосе движения может выполняться с использованием второй карты MP2, которая не включает в себя идентификационную информацию каждой полосы движения. Как перечислено на фиг. 2, вторая карта MP2 не включает в себя идентификационную информацию полос движения и информацию назначения присоединения для каждой полосы движения. Вторая карта MP2 также не включает в себя трехмерную позиционную информацию.
[0032] Управление вождением при удержании на полосе движения включает в себя распознавание полосы движения, в которой движется транспортное средство, и управление перемещением транспортного средства таким образом, чтобы сохранять определенную взаимосвязь между позицией разделительной линии полосы движения и позицией рассматриваемого транспортного средства. Разделительная линия может представлять собой линию, проведенную на поверхности дороги, а также может представлять собой дорожное сооружение, существующее на стороне обочины дороги полосы движения, такое как дорожное ограждение, бордюрный камень, тротуар или дорога с ограниченным доступом для двух колес, либо такая конструкция, как дорожный знак, магазин или придорожное дерево.
[0033] Чтобы выполнять автономное вождение, требуется высокоточная карта, включающая в себя, по меньшей мере, идентификационную информацию полос движения, но для создания высокоточной карты, в которой идентификационная информация полос движения предоставляется для всех областей, требуются неизмеримые затраты и усилия. Нереалистично то, что высокоточные карты создаются для всех областей в стране и в мире. Когда управление автономным вождением поясняется, предполагается, что высокоточные карты всех областей существуют экспериментально или фактически, но картографическая информация, фактически используемая, вероятно, должна заключать в себе карты, в которых смешиваются высокоточные карты и приближенноточные карты. В варианте осуществления, высокоточные карты могут использоваться только для областей с интенсивным движением, областей, в которых выполняется автономное вождение, и магистральных дорог. Картографическая информация согласно одному или более вариантов осуществления настоящего изобретения может представляться посредством одной карты, которая включает в себя первую карту MP1 и вторую карту MP2 в различных областях, или также может включать в себя первую карту MP1 и вторую карту MP2 в качестве соответствующих картографических данных. Вторые картографические данные MP2 могут включать в себя карту (приближенноточную карту) всей области, включающей в себя первую область и вторую область.
[0034] Фиг. 3 иллюстрирует пример картографической информации 300. Картографическая информация 300, проиллюстрированная на фиг. 3, включает в себя первую карту MP1 первой области и вторую карту MP2 второй области, отличной от первой области. Первая карта MP1 картографической информации 300 представляет собой высокоточную карту первой области, которая включает в себя магистральные дороги и окружена посредством магистральных дорог.
[0035] Картографическая информация 300 включает в себя информацию дороги. Информация дороги включает в себя, для каждого соединения, такие атрибуты, как тип дороги, ширина дороги, форма дороги и то, разрешается или нет обгон (разрешается или нет смена полосы движения на смежную полосу движения). Атрибут каждой полосы движения сохраняется для каждого соединения в качестве элемента информации дороги первой карты MP1. Информация дороги может использоваться для того, чтобы идентифицировать полосу движения с атрибутом движения на относительно низкой скорости и полосу движения (полосу обгона) с атрибутом движения на относительно высокой скорости. Информация дороги первой карты MP1 включает в себя относительную позицию каждой полосы движения. Информация дороги включает в себя, для каждой полосы движения, такой атрибут, как крайняя правая полоса движения дороги, крайняя левая полоса движения дороги, n–ая полоса движения или полоса движения, для которой другая полоса движения существует справа или слева.
[0036] Как описано выше, предусмотрены выполняемое управление вождением и невыполняемое управление вождением в зависимости от точности картографической информации 300. В качестве примера, фиг. 2 перечисляет выполняемое управление вождением с первой картой MP1 и выполняемое управление вождением со второй картой MP2. При использовании первой карты MP1, выполняемое управление вождением включает в себя управление вождением на перекрестках и управление вождением на слияниях/разветвлениях, которые считаются имеющими наибольшую техническую сложность, и управление вождением при смене полосы движения, которое является основой управления вождением на перекрестках и управления вождением на слияниях/разветвлениях. При использовании второй карты MP2, эти три формы управления вождением затруднительно выполнять. Следует понимать, что устройство 10 управления должно иметь способность выполнять управление вождением с использованием первой карты MP1.
Управление вождением при удержании на полосе движения, которое является технически простым (т.е. уровень автономного вождения является низким), может выполняться с использованием любой из первой карты MP и второй карты MP2. Аналогично, независимо от того, какая из первой карты MP1 и второй карты MP2 используется, может выполняться режим для помощи при вождении на основе намерения водителя (в котором водитель определяет операцию вождения, и выполняется помощь при операции).
[0037] Далее описываются процессы, выполняемые посредством устройства 10 управления.
Устройство 10 управления получает пункт назначения транспортного средства. Пункт назначения может указываться посредством ввода, выполненного водителем или пассажиром, либо также может быть обозначен посредством оборудования 100 управления вождением на основе предыстории.
Устройство 10 управления обращается к первой карте MP и/или второй карте MP2, чтобы вычислять намеченный путь из текущей позиции транспортного средства в пункт назначения. Любой способ поиска намеченного пути, известный на момент подачи настоящей заявки, может использоваться для вычисления намеченного пути.
[0038] Вычисленный намеченный путь включает в себя первый намеченный путь, принадлежащий первой карте MP1, и второй намеченный путь, принадлежащий второй карте MP2. При движении по первому намеченному пути, включенному в намеченный путь и принадлежащему первой карте MP1, устройство 10 управления задает первое управление вождением, в то время как при движении по второму намеченному пути, включенному в намеченный путь и принадлежащему второй карте MP2, устройство 10 управления задает второе управление вождением с более низким уровнем автономного вождения, чем уровень автономного вождения для первого управления вождением. Устройство 10 управления затем создает план вождения для движения транспортного средства в пункт назначения с контентом заданного управления вождением.
При использовании первой карты MP1, может выполняться управление вождением, включающее в себя вождение при смене полосы движения с высоким уровнем автономного вождения, но при использовании второй карты MP2, вождение при смене полосы движения не может выполняться. Если действие не осуществляется, автономное вождение должно прекращаться непосредственно в момент въезда во вторую область, даже если автономное вождение выполнено по первому намеченному пути в первой области. При въезде во вторую область из первой области, устройство 10 управления понижает уровень автономного вождения управления вождением, чтобы продолжать управление вождением. Например, транспортное средство управляется таким образом, что оно движется по первому намеченному пути в первой области, на основе любого из управления вождением при смене полосы движения, управления вождением на слияниях/разветвлениях и управления вождением для проезда через перекресток, которые включаются в автономное вождение, и управляется таким образом, что оно движется по второму намеченному пути во второй области, на основе управления вождением, которое не включает в себя управление вождением при смене полосы движения. В частности, транспортное средство управляется таким образом, что оно движется по первому намеченному пути в первой области, посредством автономного вождения, которое включает в себя смену полосы движения, и управляется таким образом, что оно движется по второму намеченному пути во второй области, посредством управления вождением при удержании на полосе движения. Таким образом, управление вождением, которое должно переключаться, может предварительно задаваться, чтобы за счет этого предотвращать внезапное прекращение управления вождением. Уровень автономного вождения может понижаться, но управление вождением продолжается, так что нагрузка на водителя и пассажиров может снижаться.
[0039] В процессе вычисления намеченных путей, намеченный путь может вычисляться таким образом, чтобы достигать предварительно определенной взаимосвязи между первыми затратами на движение для первого намеченного пути, принадлежащего первой карте MP1, и вторыми затратами на движение для второго намеченного пути, принадлежащего второй карте MP2. Таким образом, предварительно определенная взаимосвязь задается касательно того, следует использовать намеченный путь для предпочтительного проезда через первый намеченный путь, принадлежащий первой карте MP1, или намеченный путь для предпочтительного проезда через второй намеченный путь, принадлежащий второй карте MP2, и намеченный путь вычисляется на основе определения. Это обеспечивает возможность создания плана вождения таким образом, чтобы произвольно задавать отношение первого намеченного пути, вдоль которого может выполняться высокоуровневое автономное вождение, и автономное вождение может использоваться в соответствии с окружением и ситуацией. Когда требуется относительно приоритезировать движение посредством автономного вождения, отношение первых затрат на движение ко вторым затратам на движение может задаваться высоким. Напротив, когда требуется использовать только функцию удержания на полосе движения без выполнения смены полосы движения и т.п., отношение первых затрат на движение ко вторым затратам на движение может задаваться низким.
[0040] Фиг. 4 иллюстрирует окружение, в котором выполняется управление вождением при смене полосы движения с высоким уровнем автономного вождения. Как проиллюстрировано на фиг. 4, центральная дорога W1 с тремя полосами Ln1, Ln2 и Ln3 движения представляет собой магистральную дорогу и включена в первую карту MP1. Однополосная дорога W2, соединенная с левой стороной магистральной дороги, представляет собой узкую городскую дорогу и включена во вторую карту MP2. Намеченный путь в пункт назначения транспортного средства V1 представляет собой намеченный путь от дороги W1 до дороги W2. Датчик 60 рассматриваемого транспортного средства V1 обнаруживает другие транспортные средства V21, V22 и V23 в качестве помех, и вождение при смене полосы движения выполняется для того, чтобы предотвращать столкновение с другими транспортными средствами таким образом, что рассматриваемое транспортное средство V1 перемещается вправо из текущей полосы движения Ln1 к полосе Ln3 движения через полосу Ln2 движения и затем возвращается из полосы Ln3 движения в полосу Ln1 движения через полосу Ln2 движения. Такое управление вождением требует высокого уровня распознавания, чтобы прогнозировать будущую полосу движения, и информация относительно высокоточной карты является важной для управления вождением. Транспортное средство V1 затем поворачивает налево на дорогу W2. Дорога W2 включена во вторую карту MP2 (информация первой карты MP1 не создается). Высокоуровневое управление автономным вождением не может выполняться на дороге W2. Вместо немедленного прекращения управления автономным вождением, устройство 10 управления переключается с управления автономным вождением (первого управления вождением), которое включает в себя вождение при смене полосы движения, на управление вождением при удержании на полосе движения (второе управление вождением), которое выполняется с использованием второй карты MP2. Во время этой операции, функциональная помощь для акселератора/тормоза может выполняться в качестве управления вождением для поддержания движения на постоянной скорости и расстояния между транспортными средствами. Управление вождением продолжается посредством переключения на второе управление вождением, а не немедленного прекращения первого управления вождением, поскольку дорога W2 не принадлежит первой карте MP1.
[0041] Второе управление вождением может включать в себя помощь при операции вождения, выполняемой водителем. Помощь при вождении водителем включает в себя помощь при операции руления, помощь при операции нажатия педали акселератора и помощь при операции нажатия педали тормоза. Устройство 10 управления помогает управлению поперечной позицией и/или продольной позицией транспортного средства. В окружении, в котором не может выполняться первое управление вождением, выполняется второе управление вождением. Во время этой операции, нагрузка водителя может уменьшаться, поскольку выполняется помощь при операции вождения водителем. С точки зрения продолжения вождения, второе управление вождением также может включать в себя прекращение управления автономным вождением и выполнение управления вождением на основе операции руления и операции торможения водителем.
[0042] Устройство 10 управления может использовать устройства 30 и 110 вывода для того, чтобы представлять план вождения водителю и пассажирам транспортного средства до начала выполнения плана вождения. План вождения включает в себя точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. Это обеспечивает возможность водителю и пассажирам подтверждать точку переключения управления автономным вождением в плане вождения до начала вождения. Таким образом, водитель и пассажиры предварительно подтверждают точку, в которой назначается инициатива вождения, и план вождения ввиду этого может плавно выполняться.
[0043] Устройство 10 управления может представлять точку изменения управления водителю и пассажирам транспортного средства при проезде через точку до точки изменения управления на предварительно определенное расстояние. Точка изменения управления представляет собой точку, в которой первое управление вождением и второе управление вождением переключаются. Это обеспечивает возможность водителю и пассажирам подтверждать точку переключения управления автономным вождением в плане вождения до точки переключения. Таким образом, план вождения может плавно выполняться, поскольку подтверждение может выполняться на вышележащей стороне точки, в которой инициатива вождения назначается (объект, определяющий управление вождением, изменяется).
[0044] Чтобы переключаться между первым управлением вождением и вторым управлением вождением, устройство 10 управления может выполнять подготовку к переключению управления вождением на вышележащей стороне точки переключения.
В частности, устройство 10 управления может создавать план вождения на вышележащей стороне точки изменения управления, в которой первое управление вождением и второе управление вождением переключаются. План вождения включает в себя управление вождением таким образом, чтобы перемещать транспортное средство в полосу движения со стороны центральной линии на вышележащей стороне точки изменения управления, в которой первое управление вождением и второе управление вождением переключаются. Полоса движения со стороны центральной линии означает полосу движения на стороне центральной линии, т.е. полосу движения на стороне встречной полосы движения. На дороге, включающей в себя множество полос движения, имеется очень высокая вероятность того, что слияние/разветвление относительно другой полосы движения осуществляется на правой или левой концевой стороне (противоположной стороне по отношению к стороне центральной линии) дороги. Не предпочтительно переключать управление вождением в полосе движения, в которой с большой вероятностью возникает изменение потока трафика. Полоса движения со стороны центральной линии зачастую может обозначаться как полоса обгона или высокоскоростная полоса движения, в которой возмущения в потоке трафика являются небольшими. В такой полосе движения, расстояние между транспортными средствами имеет тенденцию задаваться большим, и ввиду этого влияние вследствие переключения управления вождением также является небольшим. С другой стороны, в полосе движения на правой или левой концевой стороне, определенное число транспортных средств движутся к ответвлению или повороту направо или налево, и некоторые транспортные средства могут парковаться на обочине дороги таким образом, что скорость движения может быть низкой, и расстояние между транспортными средствами имеет тенденцию быть небольшим. Влияние вследствие переключения управления вождением ввиду этого может быть большим. Соответственно, при подготовке к переключению управления вождением, устройство 10 управления управляет транспортным средством таким образом, что оно предварительно перемещается в полосу движения со стороны центральной линии, в которой изменение потока трафика возникает с меньшей вероятностью, на вышележащей стороне точки переключения управления вождением. Это позволяет подавлять влияние на транспортное средство вследствие переключения управления вождением.
[0045] Устройство 10 управления может создавать план вождения, включающий в себя управление вождением таким образом, чтобы перемещать транспортное средство в центральную область полосы движения при движении через точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. Посредством перемещения транспортного средства в центр полосы движения до переключения управления вождением, можно легко реагировать на любое изменение поведения транспортного средства. Это позволяет подавлять влияние на транспортное средство вследствие переключения управления вождением и подготавливаться к изменению поведения.
[0046] Устройство 10 управления может создавать план вождения, включающий в себя управление вождением таким образом, чтобы задавать скорость транспортного средства равной целевому значению при движении через точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. При переключении управления вождением, предпочтительно, если ускорение и замедление не затрагивают поток трафика. Также предпочтительно задавать целевое значение на основе скорости для полосы движения, в которой движется транспортное средство при переключении управления вождением, и задавать скорость транспортного средства равной целевому значению. Целевое значение может задаваться на основе средней скорости, ограничения скорости или фактически измеряемой скорости для полосы движения. Скорость (средняя скорость, ограничение скорости или фактически измеряемая скорость) для полосы движения может получаться из картографической информации 300 посредством, по меньшей мере, временного сохранения скорости в ассоциации с информацией дороги из картографической информации 300. Скорость также может получаться из интеллектуальных транспортных систем (ITS). Это позволяет подавлять изменение поведения транспортного средства вследствие переключения управления вождением и предотвращать влияние на вождение другого транспортного средства.
[0047] Устройство 10 управления может создавать план вождения, включающий в себя управление вождением таким образом, чтобы задавать величину изменения поведения транспортного средства меньше предварительно определенного значения при движении через точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. При переключении между первым управлением вождением и вторым управлением вождением, поведение транспортного средства изменяется в некоторой степени, но даже если изменение возникает в поведении транспортного средства, изменение поведения транспортного средства задается плавным. Это позволяет обеспечивать умеренность изменения поведения транспортного средства вследствие переключения управления вождением и предотвращать влияние на вождение другого транспортного средства.
[0048] Устройство 10 управления может создавать план вождения, включающий в себя управление вождением таким образом, чтобы понижать усиление системы управления транспортного средства при движении через точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. Когда управление вождением переключается, усиление системы управления понижается, чтобы обеспечивать возможность простого подтверждения вмешательства водителя в работу, так что даже когда водитель внезапно поворачивает руль, управляющая команда водителя может выполняться без конфликта с управлением вождением, которое выполняется (без отклонения).
[0049] Устройство 10 управления может создавать план вождения таким образом, что переключение между первым управлением вождением и вторым управлением вождением выполняется в полосе движения, имеющей кривизну меньше предварительно определенной кривизны. Посредством выполнения переключения управления вождением в области (в намеченном пути), в которой поперечное ускорение и поперечный рывок возникают с меньшей вероятностью, можно подавлять изменение поведения транспортного средства вследствие переключения управления вождением.
[0050] Устройство 10 управления может создавать план вождения таким образом, что переключение между первым управлением вождением и вторым управлением вождением выполняется в полосе движения, в которой число транспортных средств, присутствующих в пределах предварительно определенного расстояния, меньше предварительно определенного значения. Когда число транспортных средств, присутствующих в пределах предварительно определенного расстояния, является большим, имеется очень высокая вероятность того, что другие транспортные средства присутствуют в окрестности. В этом случае, может быть необходимым создавать план вождения для транспортного средства с учетом перемещения других транспортных средств в окрестности, и вычисление плана вождения должно усложняться. Посредством выполнения переключения управления вождением в полосе движения, в которой число других транспортных средств является небольшим, можно выполнять управление, которое отдает приоритет перемещению рассматриваемого транспортного средства с учетом только поведения рассматриваемого транспортного средства.
[0051] Далее описывается процедура управления оборудования 100 управления вождением согласно одному или более вариантов осуществления настоящего изобретения со ссылкой на фиг. 5. Контент процесса на каждом этапе является таким, как описано выше, и ниже описывается главным образом последовательность операций процесса.
[0052] На этапе S101, устройство 10 управления получает информацию рассматриваемого транспортного средства, которая включает в себя, по меньшей мере, текущую позицию рассматриваемого транспортного средства V1. Информация рассматриваемого транспортного средства дополнительно может включать в себя скорость/ускорение транспортного средства для рассматриваемого транспортного средства V1. На этапе S102, устройство 10 управления считывает картографическую информацию 300 области, которая включает в себя текущую позицию. Картографическая информация 300 включает в себя первую карту MP1 и вторую карту MP2.
[0053] На этапе S103, устройство 10 управления вычисляет намеченный путь из текущей позиции в пункт назначения. Для первого намеченного пути, принадлежащего первой карте MP1, и второго намеченного пути, принадлежащего второй карте MP2, устройство 10 управления создает план вождения, в котором управление вождением переключается в соответствии с точностью карты. При движении по первому намеченному пути, включенному в намеченный путь и принадлежащему первой карте MP1, задается первое управление вождением, в то время как при движении по второму намеченному пути, включенному в намеченный путь и принадлежащему второй карте MP2, задается второе управление вождением, имеющее более низкий уровень автономного вождения, чем уровень автономного вождения для первого управления вождением. Первое управление вождением имеет более высокую степень уровня автономного вождения, чем степень уровня автономного вождения для второго управления вождением, т.е. более высокую степень отсутствия необходимости операции человеком, чем степень отсутствия необходимости операции человеком для второго управления вождением. В частности, первое управление вождением включает в себя любое одно или более из управления вождением при смене полосы движения, управления вождением на слияниях/разветвлениях и управления вождением на перекрестках посредством автономного вождения с использованием результата прогнозирования полосы движения в направлении движения транспортного средства, в то время как второе управление вождением не включает в себя управление вождением при смене полосы движения, управление вождением на слияниях/разветвлениях и управление вождением на перекрестках. При переходе от первого намеченного пути ко второму намеченному пути, устройство 10 управления переключает управление вождением с первого управления вождением на второе управление вождением, имеющее более низкий уровень автономного вождения.
[0054] План вождения включает в себя контент управления в качестве подготовки перед переключением на второе управление вождением. Устройство 10 управления осуществляет подготовку на вышележащей стороне точки переключения управления. Примеры подготовки включают в себя перемещение транспортного средства в полосу движения со стороны центральной линии (в полосу движения на противоположной стороне относительно правого конца или левого конца), перемещение транспортного средства в центр полосы движения, задание скорости равной целевому значению, соответствующему скорости движения для полосы движения, перемещение транспортного средства в полосу движения, имеющую кривизну меньше предварительно определенной кривизны, и задание точки управления переключения как точки, соответствующей времени, когда плотность транспортных средств является низкой. Это позволяет подавлять изменение поведения транспортного средства при переключении управления вождением и предотвращать помехи плавному вождению других транспортных средств.
[0055] План вождения также может включать в себя контент управления при переключении на второе управление вождением. В точке переключения управления, устройство 10 управления может задавать величину изменения поведения транспортного средства меньше предварительно определенного значения и/или понижать усиление системы управления транспортного средства.
[0056] Созданный план вождения может представляться водителю и пассажирам до того, как план вождения выполняется. План вождения, включающий в себя управление вождением в точке изменения управления, в которой управление вождением изменяется, может представляться водителю и пассажирам до точки изменения управления.
[0057] Устройство 10 управления может управлять устройствами 30 и/или 110 вывода таким образом, чтобы представлять вычисленный намеченный путь. Примеры отображения проиллюстрированы на фиг. 3 и 4. Для простой идентификации водителем и пассажирами первого намеченного пути и второго намеченного пути, намеченные пути могут отображаться с различными формами (к примеру, цветом, толщиной и пунктирными линиями). Помимо этого или альтернативно, для простого распознавания водителем и пассажирами точки въезда в первую область и точки выезда из первой области, точки присоединения могут отображаться с помощью выделения. Точка въезда в первую область и точка выезда из первой области соответствуют точкам, в которых управление вождением переключается.
[0058] На этапе S104, устройство 10 управления получает результат обнаружения объекта из устройства 50 обнаружения. Результат обнаружения объекта включает в себя информацию относительно позиции другого транспортного средства. Устройство 10 управления распознает объект, такой как другое транспортное средство, в качестве помехи, которую должно объезжать транспортное средство.
[0059] На этапе S105, устройство 10 управления вычисляет целевые позиции, которые используются в качестве опорных для управления вождением для транспортного средства. Каждая целевая позиция включает в себя целевую поперечную позицию (целевую координату X) и целевую продольную позицию (целевую координату Y). Целевые позиции предоставляют собой позиции, в которых не допускается приближение вплотную/вхождение в контакт транспортного средства с помехой. Целевой намеченный путь получается посредством соединения вычисленной одной или более целевых координат и текущей позиции транспортного средства V1.
[0060] На этапе S106, устройство 10 управления сравнивает текущую поперечную позицию рассматриваемого транспортного средства V1 с целевой поперечной позицией, полученной на этапе S105, и вычисляет усиление обратной связи для поперечной позиции на основе результата сравнения.
[0061] На этапе S107, устройство 10 управления вычисляет целевое значение управления на основе фактической поперечной позиции рассматриваемого транспортного средства V1, целевой поперечной позиции, соответствующей текущей позиции, и усиления обратной связи этапа S106. Целевое значение управления связано с углом поворота при рулении, угловой скоростью руления и другими параметрами, необходимыми для перемещения рассматриваемого транспортного средства V1 в целевую поперечную позицию. На этапе S112, устройство 10 управления выводит целевое значение управления в бортовое оборудование 200. Это обеспечивает возможность рассматриваемому транспортному средству V1 двигаться по целевому намеченному пути, который задается посредством целевой поперечной позиции.
[0062] На этапе S109, устройство 10 управления вычисляет целевую продольную позицию вдоль намеченного пути. На этапе S110, устройство 10 управления сравнивает текущую продольную позицию и скорость и ускорение транспортного средства в текущей позиции рассматриваемого транспортного средства V1 с целевой продольной позицией, соответствующей текущей продольной позиции, и скоростью и ускорением транспортного средства в целевой продольной позиции и вычисляет усиление обратной связи для продольной позиции на основе результата сравнения. После этого, на этапе S111, устройство 10 управления вычисляет целевое значение управления для продольной позиции на основе скорости и ускорения транспортного средства, соответствующих целевой продольной позиции, и усиления обратной связи для продольной позиции, вычисленного на этапе S110.
[0063] Здесь, целевое значение управления в продольном направлении означает значение управления для каждой из операции приводного механизма (которая включает в себя операцию двигателя внутреннего сгорания в случае автомобиля с двигателем и операцию электромотора в случае электромобиля и может дополнительно включать в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля) и операции торможения, чтобы достигать ускорения, замедления и скорости транспортного средства, соответствующих целевой продольной позиции. Например, в автомобиле с двигателем, функция управления служит для того, чтобы вычислять целевой объем всасываемого воздуха (целевую степень открытия дроссельного клапана) и целевой объем впрыска топлива на основе значений текущего и целевого ускорения, замедления и скорости транспортного средства и отправлять их в устройство 80 приведения в движение. Альтернативно, функция управления может служить для того, чтобы вычислять ускорение, замедление и скорость транспортного средства и отправлять их в контроллер 70 транспортного средства, который может вычислять значение управления для каждой из операции приводного механизма (которая включает в себя операцию двигателя внутреннего сгорания в случае автомобиля с двигателем и операцию электромотора в случае электромобиля и дополнительно может включать в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля), и операции торможения, чтобы достигать этого ускорения, замедления и скорости транспортного средства.
[0064] На этапе S112, устройство 10 управления выводит целевое значение управления в продольном направлении, вычисленное на этапе S111, в бортовое оборудование 200. Контроллер 70 транспортного средства выполняет управление рулением и управление вождением таким образом, чтобы управлять рассматриваемым транспортным средством с возможностью двигаться по целевому намеченному пути, который задается посредством целевой поперечной позиции и целевой продольной позиции. Как указано на вышеописанных этапах S105–S107 и S112, процессы этапов S109–S112 повторяются каждый раз, когда получается целевая продольная позиция, и значение управления для каждой полученной целевой продольной позиции выводится в бортовое оборудование 200.
На этапе S113, контроллер 70 транспортного средства выполняет управление вождением в соответствии с командой из устройства 10 управления.
[0065] На этапе S114, устройство 10 управления определяет то, вмешивается или нет водитель в работу, к примеру, то, выполняет или нет водитель операцию руления. Когда операция водителем не обнаруживается, процесс возвращается к этапу S101, с которого задание новой объектной области, вычисление целевого намеченного пути и управление вождением повторяются. С другой стороны, когда операция водителем обнаруживается, процесс переходит к этапу S115, на котором управление вождением приостанавливается. Когда управление вождением приостанавливается, водитель и пассажиры информируются в отношении этого факта.
[0066] Фиг. 6 является диаграммой для описания способа выполнения плана вождения по этапу S113, проиллюстрированного на фиг. 5.
На этапе S201, устройство 10 управления определяет то, находится или нет окрестность рассматриваемого транспортного средства в первой области первой карты MP1. Когда выполняется определение в отношении того, что окрестность рассматриваемого транспортного средства находится в первой области, процесс переходит к этапу S202, на котором функция прямого прогнозирования активируется с использованием первой карты MP1. Функция прямого прогнозирования выполняется с использованием идентификационной информации полос движения первой карты MP1. На этапе S203, устройство 10 управления выдает заблаговременное уведомление касательно выполнения первого управления вождением водителю и пассажирам. На этапе S204, устройство 10 управления выполняет первое управление вождением с использованием первой карты.
[0067] Когда на этапе S201 выполняется определение в отношении того, что окрестность рассматриваемого транспортного средства не находится в первой области первой карты MP1, процесс переходит к этапу S205. На этапе S205, выполняется определение в отношении того, может или нет выполняться второе управление вождением. То, может или нет выполняться второе управление вождением, определяется с помощью таких критериев, что вторая карта MP2 доступна, кривизна дороги меньше предварительно определенного значения, скорость окружающего другого транспортного средства меньше предварительно определенного значения, и/или расстояние до другого транспортного средства составляет предварительно определенное значение или больше. Это также может определяться на основе того, удовлетворяет или нет точность обнаружения полос движения, необходимая для движения с удержанием на полосе движения, предварительно определенной степени надежности. После этапа S205 выполняется этап S206, на котором функция прямого прогнозирования с использованием первой карты MP1 отменяется. На этапе S207, устройство 10 управления выдает заблаговременное уведомление касательно выполнения второго управления вождением водителю и пассажирам. На этапе S208, устройство 10 управления выполняет второе управление вождением с использованием второй карты.
[0068] Когда на этапе S205 выполняется определение в отношении того, что второе управление вождением не может выполняться, отмена функции управления вождением определяется на этапе S209, и водитель и пассажиры уведомляются в отношении этого факта на этапе S210.
[0069] Фиг. 7 и 8 являются диаграммой и схемой для описания операции во время переключения с первого управления вождением на второе управление вождением.
Фиг. 7 иллюстрирует пример процесса по этапу S208, проиллюстрированного на фиг. 6.
[0070] Предполагается, что первое управление вождением (высокоуровневое автономное вождение) с использованием первой карты MP1 в данный момент выполняется. На этапе S301, устройство 10 управления определяет то, меньше или нет расстояние до второй области предварительно определенного значения. Устройство 10 управления отслеживает приближение к граничной точке между первой областью и второй областью. Когда расстояние до второй области не меньше предварительно определенного значения, процесс переходит к этапу S307, чтобы продолжать первое управление вождением.
На этапе S302, устройство 10 управления подготавливается к управлению вождением при удержании на полосе движения (второму управлению вождением), выполняемому во второй области в соответствии с планом вождения, и предварительно перемещает транспортное средство в полосу движения, в которой может легко выполняться удержание на полосе движения. Полоса движения, в которой может легко выполняться удержание на полосе движения, означает полосу движения со стороны центральной линии, в которой скорость транспортного средства для движущихся транспортных средств является стабильной вследствие отсутствия точек слияния/разветвления. После этапа S302 выполняется этап S303, на котором устройство 10 управления замедляет или ускоряет транспортное средство до скорости транспортного средства (целевого значения), которая обеспечивает возможность простого выполнения удержания на полосе движения. Целевое значение задается на основе средней скорости для полосы движения. На этапе S304, устройство 10 управления получает позицию в полосе движения, в которой может легко выполняться удержание на полосе движения, и направляет транспортное средство. Позиция, в которой может легко выполняться удержание на полосе движения, означает позицию в центральной области полосы движения. Можно реагировать на регулирование поперечной позиции, даже если другое транспортное средстве приближается после выполнения управления вождением. На этапе S305, устройство 10 управления понижает усиление системы управления таким образом, что функциональный ввод от водителя не отклоняется. Это обеспечивает возможность водителю легко вмешиваться в работу во время переключения управления вождением, в котором прогнозируется изменение ситуации. На этапе S306, устройство 10 управления уведомляет водителя и пассажиры через устройства 30 и 110 вывода в отношении того, что выполняется первое управление вождением. Это позволяет убеждать водителя и пассажиров посредством уведомления их в отношении того, что некоторое изменение возникает в поведении транспортного средства, но первое управление вождением выполняется. Помимо этого или альтернативно, устройство 10 управления может выдавать заблаговременное уведомление в отношении того, что первое управление вождением должно переключаться на второе управление вождением.
[0071] Оборудование 100 управления вождением согласно одному или более вариантов осуществления настоящего изобретения сконфигурировано и работает так, как указано выше, и ввиду этого имеет следующие преимущества.
[0072] (1) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя, при движении по первому намеченному пути, включенному в намеченный путь и принадлежащему первой карте MP1, задание первого управления вождением, в то время как при движении по второму намеченному пути, включенному в намеченный путь и принадлежащему второй карте MP2, задание второго управления вождением с более низким уровнем автономного вождения, чем уровень автономного вождения для первого управления вождением, и создание плана вождения для движения транспортного средства в пункт назначения с контентом заданного управления вождением.
При использовании первой карты MP1, может выполняться управление вождением, включающее в себя вождение при смене полосы движения с высоким уровнем автономного вождения, но при использовании второй карты MP2, вождение при смене полосы движения не может выполняться. Если действие не осуществляется, автономное вождение должно прекращаться непосредственно в момент въезда во вторую область, даже если автономное вождение выполнено по первому намеченному пути в первой области. В способе управления вождением согласно одному или более вариантов осуществления настоящего изобретения, при въезде во вторую область из первой области, уровень автономного вождения управления вождением понижается, чтобы продолжать управление вождением. Транспортное средство управляется таким образом, что оно движется по первому намеченному пути в первой области, посредством автономного вождения, которое включает в себя смену полосы движения, и управляется таким образом, что оно движется по второму намеченному пути во второй области, посредством управления вождением при удержании на полосе движения. Таким образом, управление вождением, которое должно переключаться, может предварительно задаваться, чтобы за счет этого предотвращать внезапное прекращение управления вождением. Уровень автономного вождения может понижаться, но управление вождением продолжается, так что нагрузка на водителя и пассажиров может снижаться.
[0073] (2) В способе управления вождением согласно одному или более вариантов осуществления настоящего изобретения, первое управление вождением, выполняемое с использованием первой карты MP1, включает в себя управление вождением при смене полосы движения посредством автономного вождения, которое использует результат прогнозирования полосы движения в направлении движения транспортного средства, в то время как второе управление вождением не включает в себя управление вождением при смене полосы движения. Первая карта MP1 и контент первого управления вождением ассоциированы друг с другом, и вторая карта MP2 и контент второго управления вождением ассоциированы друг с другом; ввиду этого управление вождением может выполняться с разными уровнями автономного вождения в соответствии с изменением карты, к которой следует обращаться. Когда первая карта MP1 не может использоваться, второе управление вождением (управление вождением при удержании на полосе движения) может продолжаться с использованием второй карты MP2 даже при низком уровне автономного вождения.
[0074] (3) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя использование устройств 30 и 110 вывода для того, чтобы представлять план вождения водителю и пассажирам транспортного средства до начала выполнения плана вождения. План вождения включает в себя точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. Это обеспечивает возможность водителю и пассажирам подтверждать точку переключения управления автономным вождением в плане вождения до начала вождения. Таким образом, водитель и пассажиры предварительно подтверждают точку, в которой назначается инициатива вождения, и план вождения ввиду этого может плавно выполняться.
[0075] (4) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя представление точки изменения управления водителю и пассажирам транспортного средства при проезде через точку до точки изменения управления на предварительно определенное расстояние. Точка изменения управления представляет собой точку, в которой первое управление вождением и второе управление вождением переключаются. Это обеспечивает возможность водителю и пассажирам подтверждать точку переключения управления автономным вождением в плане вождения до точки переключения. Таким образом, план вождения может плавно выполняться, поскольку подтверждение может выполняться на вышележащей стороне точки, в которой назначается инициатива вождения.
[0076] (5) В способе управления вождением согласно одному или более вариантов осуществления настоящего изобретения, второе управление вождением включает в себя помощь при операции вождения, выполняемой водителем. Помощь при вождении водителем включает в себя помощь при операции руления, помощь при операции нажатия педали акселератора и помощь при операции нажатия педали тормоза. В окружении, в котором не может выполняться первое управление вождением, выполняется второе управление вождением. Во время этой операции, нагрузка водителя может уменьшаться, поскольку выполняется помощь при операции вождения водителем.
[0077] (6) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя создание плана вождения на вышележащей стороне точки изменения управления, в которой первое управление вождением и второе управление вождением переключаются. План вождения включает в себя управление вождением для перемещения транспортного средства в полосу движения со стороны центральной линии. Полоса движения со стороны центральной линии означает полосу движения на стороне центральной линии, т.е. полосу движения на стороне встречной полосы движения. На дороге, включающей в себя множество полос движения, имеется очень высокая вероятность того, что слияние/разветвление относительно другой полосы движения осуществляется на правой или левой концевой стороне (противоположной стороне по отношению к стороне центральной линии) дороги. Не предпочтительно переключать управление вождением в полосе движения, в которой с большой вероятностью возникает изменение потока трафика. Полоса движения со стороны центральной линии зачастую может обозначаться как полоса обгона или высокоскоростная полоса движения, в которой возмущения в потоке трафика являются небольшими. В такой полосе движения, расстояние между транспортными средствами имеет тенденцию задаваться большим, и ввиду этого влияние вследствие переключения управления вождением также является небольшим. С другой стороны, в полосе движения на правой или левой концевой стороне, определенное число транспортных средств движутся к ответвлению или повороту направо или налево, и некоторые транспортные средства могут парковаться на обочине дороги таким образом, что скорость движения может быть низкой, и расстояние между транспортными средствами имеет тенденцию быть небольшим. Влияние вследствие переключения управления вождением ввиду этого может быть большим. Соответственно, в способе управления вождением согласно одному или более вариантов осуществления настоящего изобретения, при подготовке к переключению управления вождением, транспортное средство управляется таким образом, что оно предварительно перемещается в полосу движения со стороны центральной линии, в которой изменение потока трафика возникает с меньшей вероятностью на вышележащей стороне точки переключения управления вождением. Это позволяет подавлять влияние на транспортное средство вследствие переключения управления вождением. Как результат, изменение поведения транспортного средства возникает с меньшей вероятностью при переключении управления вождением.
[0078] (7) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя создание плана вождения, включающего в себя управление вождением таким образом, чтобы перемещать транспортное средство в центральную область полосы движения при движении через точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. Посредством перемещения транспортного средства в центр полосы движения до переключения управления вождением, можно легко реагировать на любое изменение поведения транспортного средства. Это позволяет подавлять влияние на транспортное средство вследствие переключения управления вождением и подготавливаться к изменению поведения.
[0079] (8) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя создание плана вождения, включающего в себя управление вождением таким образом, чтобы задавать скорость транспортного средства равной целевому значению при движении через точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. При переключении управления вождением, предпочтительно, если ускорение и замедление не затрагивают поток трафика. Также предпочтительно задавать целевое значение на основе скорости для полосы движения, в которой движется транспортное средство при переключении управления вождением, и задавать скорость транспортного средства равной целевому значению. Это позволяет подавлять изменение поведения транспортного средства вследствие переключения управления вождением и предотвращать влияние на вождение другого транспортного средства.
[0080] (9) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя создание плана вождения, включающего в себя управление вождением таким образом, чтобы задавать величину изменения поведения транспортного средства меньше предварительно определенного значения при движении через точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. Даже если изменение возникает в поведении транспортного средства при переключении между первым управлением вождением и вторым управлением вождением, изменение поведения становится плавным. Это позволяет обеспечивать плавность поведения транспортного средства вследствие переключения управления вождением и предотвращать влияние на вождение другого транспортного средства.
[0081] (10) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя создание плана вождения, включающего в себя управление вождением таким образом, чтобы понижать усиление системы управления транспортного средства при движении через точку изменения управления, в которой первое управление вождением и второе управление вождением переключаются. Когда управление вождением переключается, усиление системы управления понижается, чтобы обеспечивать возможность простого подтверждения вмешательства водителя в работу, так что даже когда водитель внезапно поворачивает руль, управляющая команда водителя может выполняться без конфликта с управлением вождением, которое выполняется (без отклонения).
[0082] (11) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя создание плана вождения таким образом, что переключение между первым управлением вождением и вторым управлением вождением выполняется в полосе движения, имеющей кривизну меньше предварительно определенной кривизны. Посредством выполнения переключения управления вождением в области (в намеченном пути), в которой поперечное ускорение или поперечный рывок возникает с меньшей вероятностью, можно подавлять изменение поведения транспортного средства вследствие переключения управления вождением.
[0083] (12) Способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения включает в себя создание плана вождения таким образом, что переключение между первым управлением вождением и вторым управлением вождением выполняется в полосе движения, в которой число транспортных средств, присутствующих в пределах предварительно определенного расстояния, меньше предварительно определенного значения. Когда число транспортных средств, присутствующих в пределах предварительно определенного расстояния, является большим, имеется очень высокая вероятность того, что другие транспортные средства присутствуют в окрестности. В этом случае, может быть необходимым создавать план вождения для транспортного средства с учетом перемещения других транспортных средств в окрестности, и вычисление плана вождения должно усложняться. Посредством выполнения переключения управления вождением в полосе движения, в которой число других транспортных средств является небольшим, можно выполнять управление, которое отдает приоритет перемещению рассматриваемого транспортного средства с учетом только поведения рассматриваемого транспортного средства.
[0084] (13) Когда способ управления вождением согласно одному или более вариантов осуществления настоящего изобретения выполняется посредством устройства 10 управления, оборудование 100 управления вождением прилагает действие и преимущества, идентичные действиям и преимуществам вышеуказанного способа управления вождением.
[0085] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
Описание позиционных обозначений
[0086] 1 – система управления вождением
100 – оборудование управления вождением
10 – устройство управления
11 – CPU
12 – ROM
300 – картографическая информация
MP1 – первая карта
MP2 – вторая карта
13 – RAM
20 – устройство связи
30 – устройство вывода
31 – дисплей
32 – динамик
200 – бортовое оборудование
40 – устройство связи
50 – устройство обнаружения
51 – камера
52 – радарное устройство
60 – датчик
61 – датчик угла поворота при рулении
62 – датчик скорости транспортного средства
70 – контроллер транспортного средства
80 – устройство приведения в движение
81 – тормозное устройство
90 – устройство рулевого управления
110 – устройство вывода
111 – дисплей
112 – динамик
120 – навигационное устройство
121 – устройство обнаружения позиции
123 – картографическая информация
MP1 – первая карта
MP2 – вторая карта
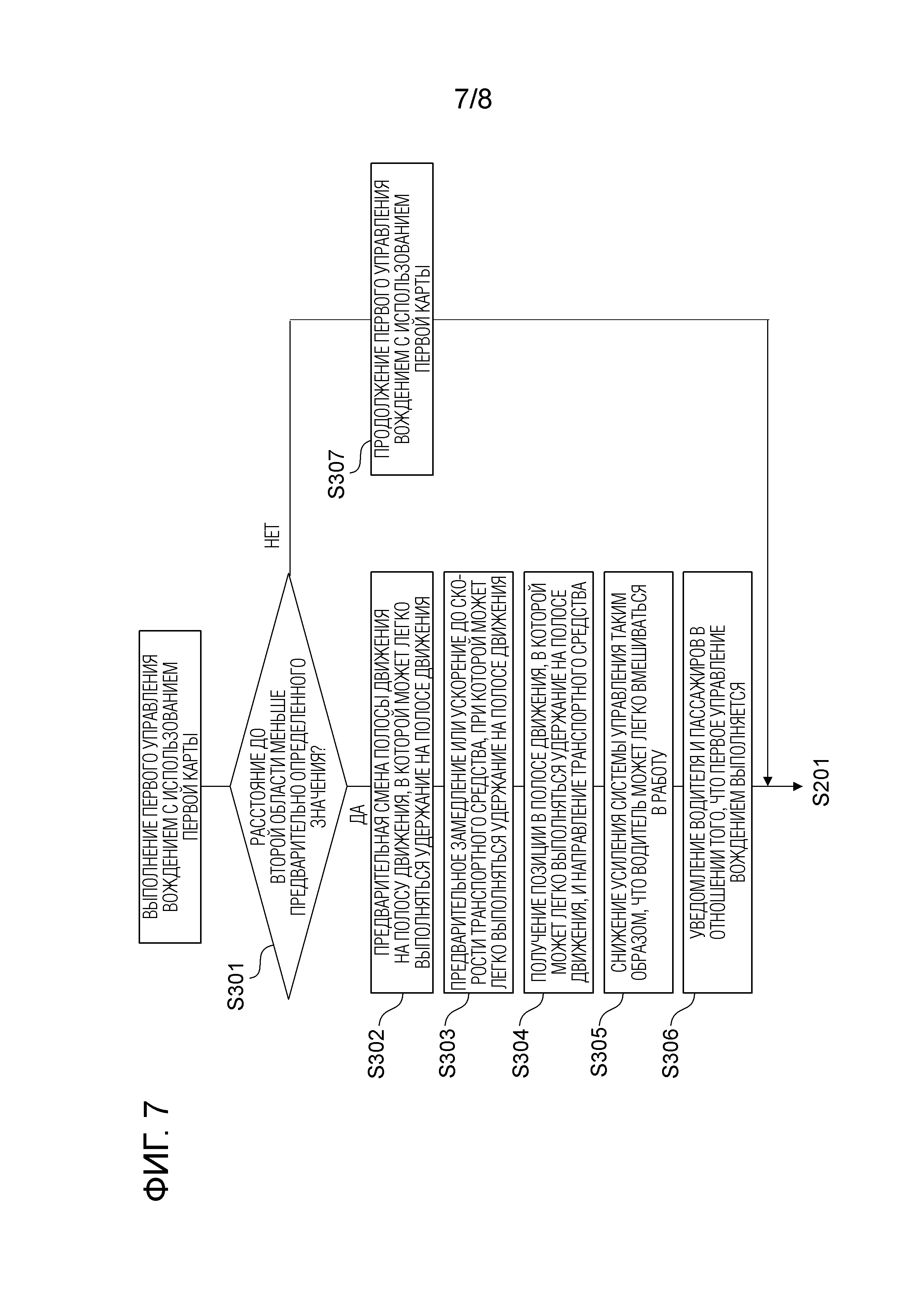
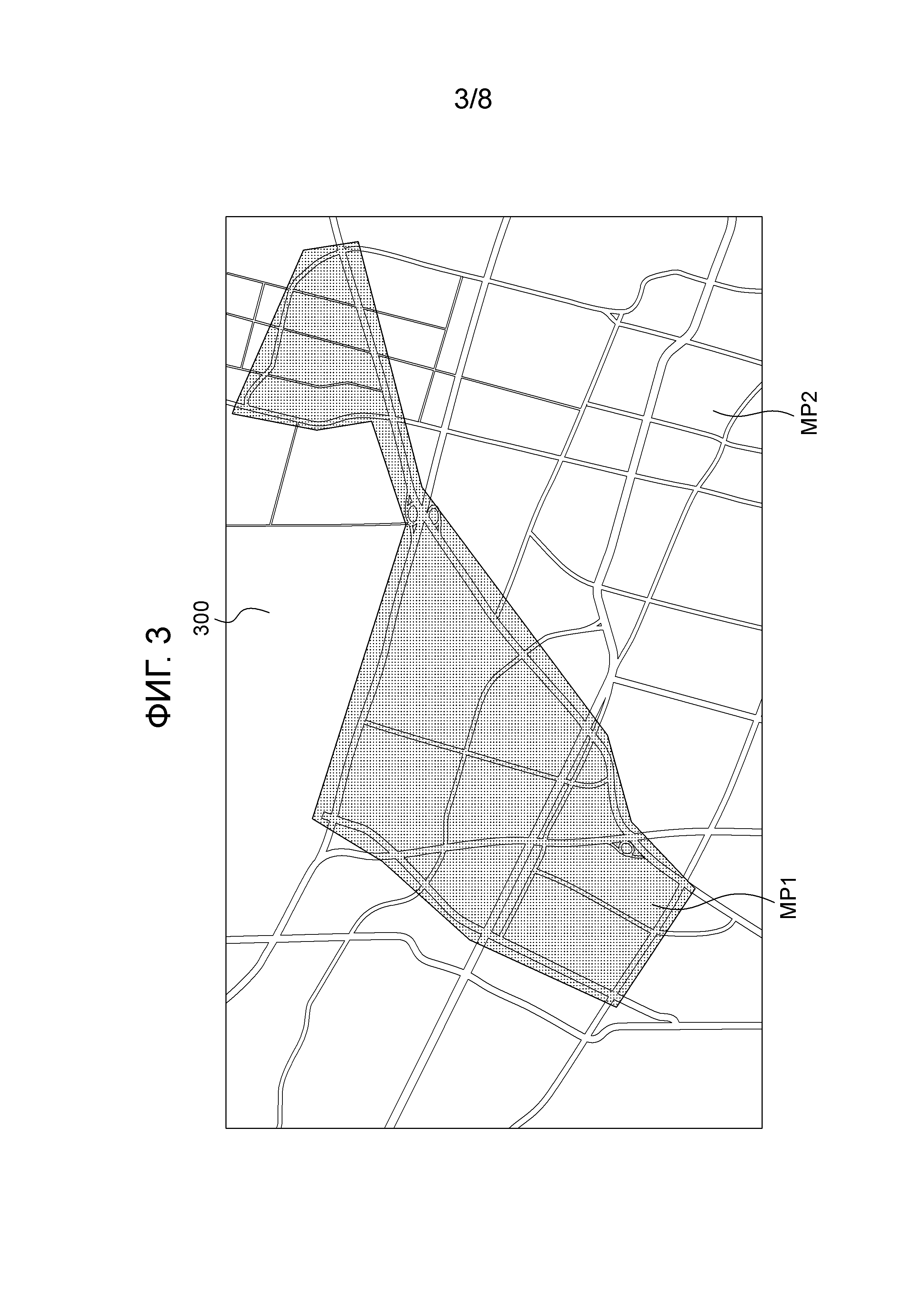
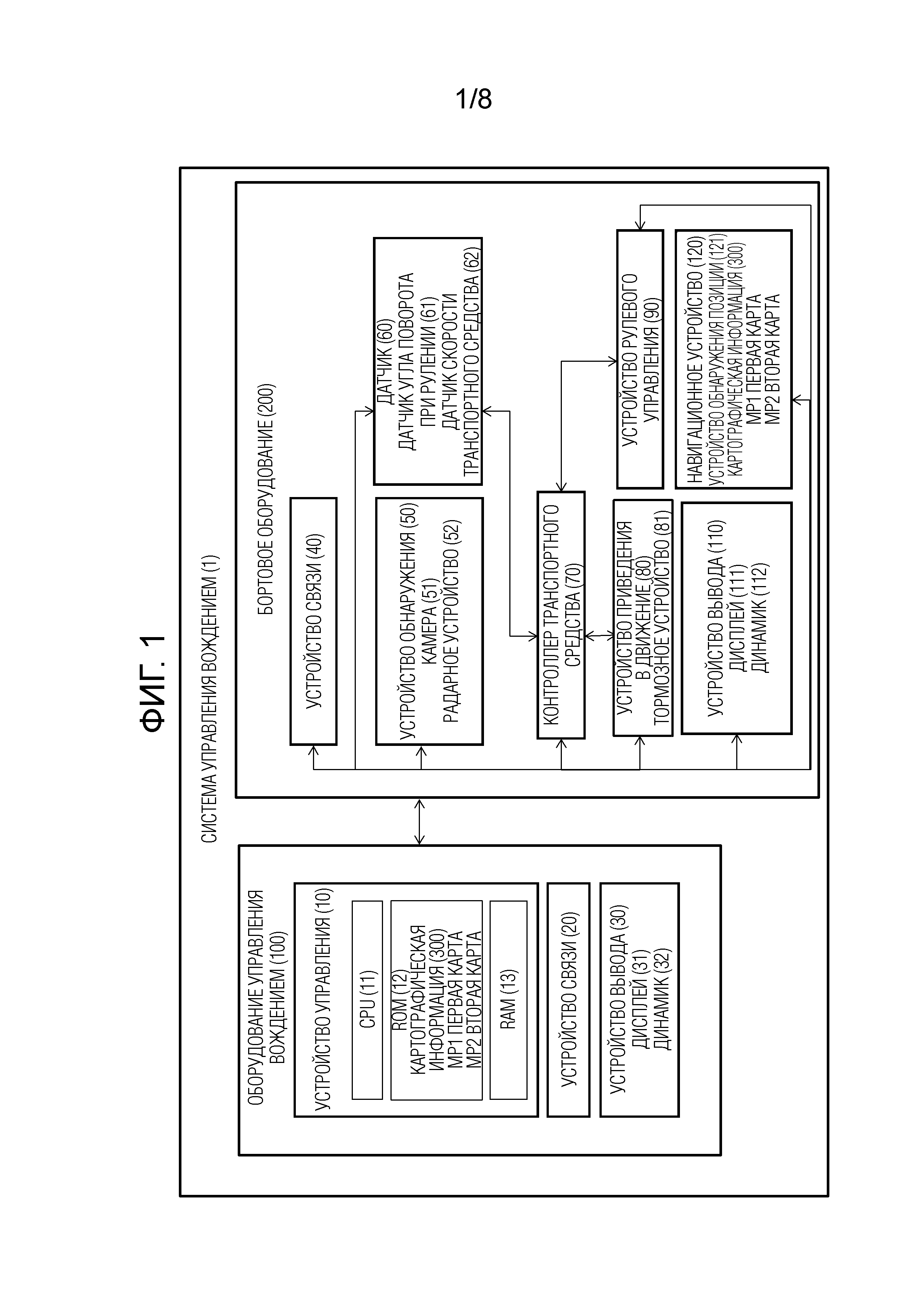
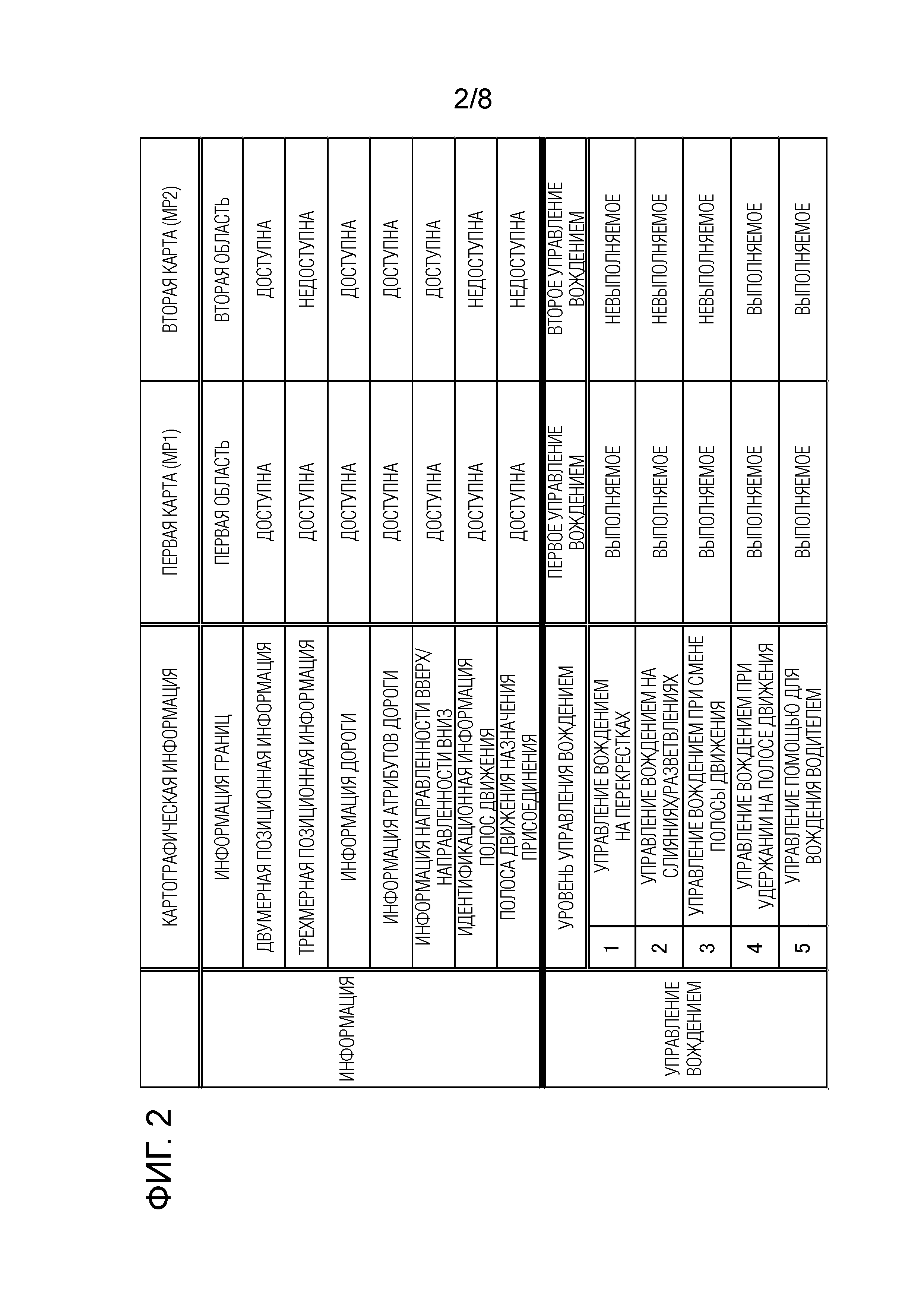
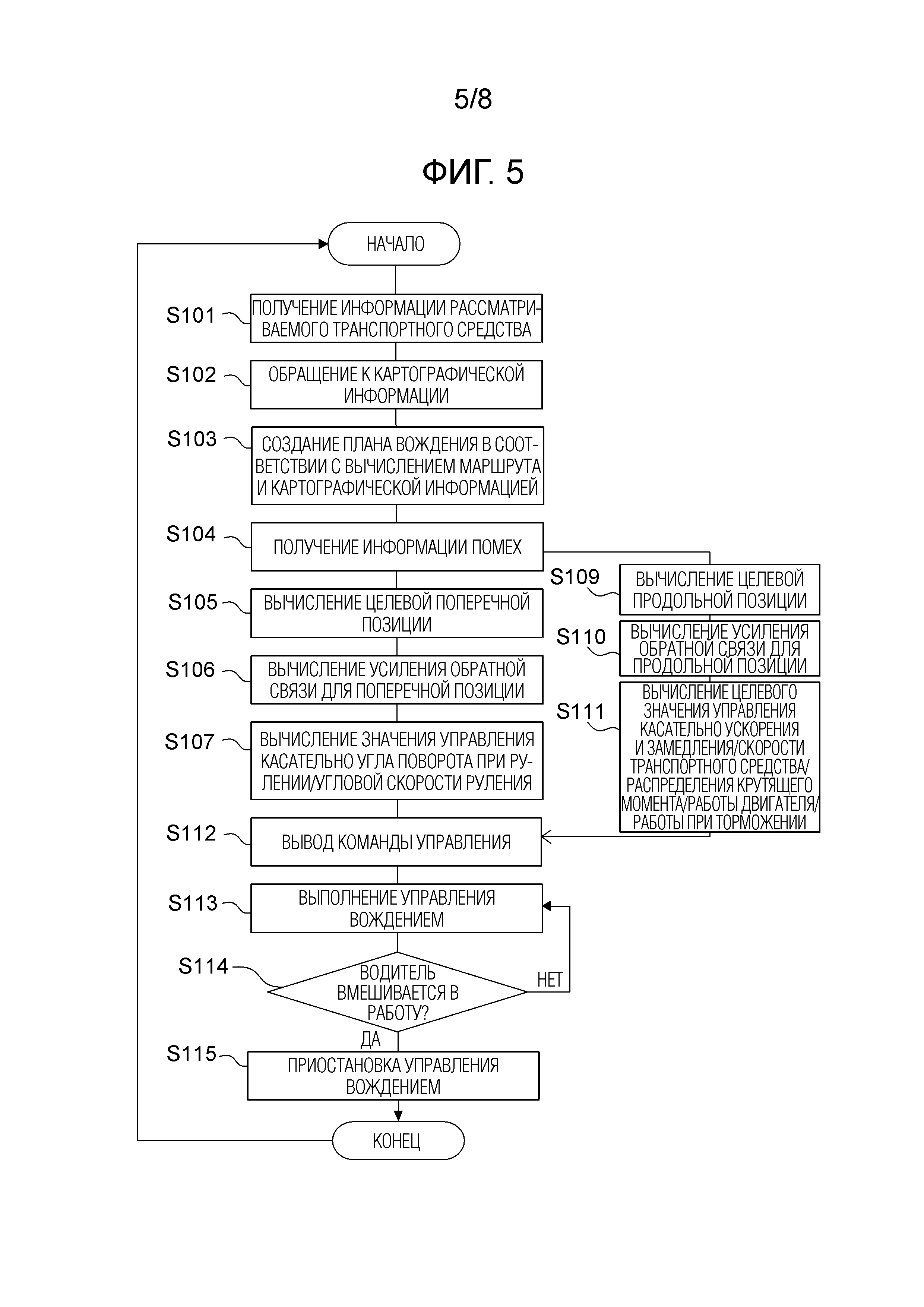
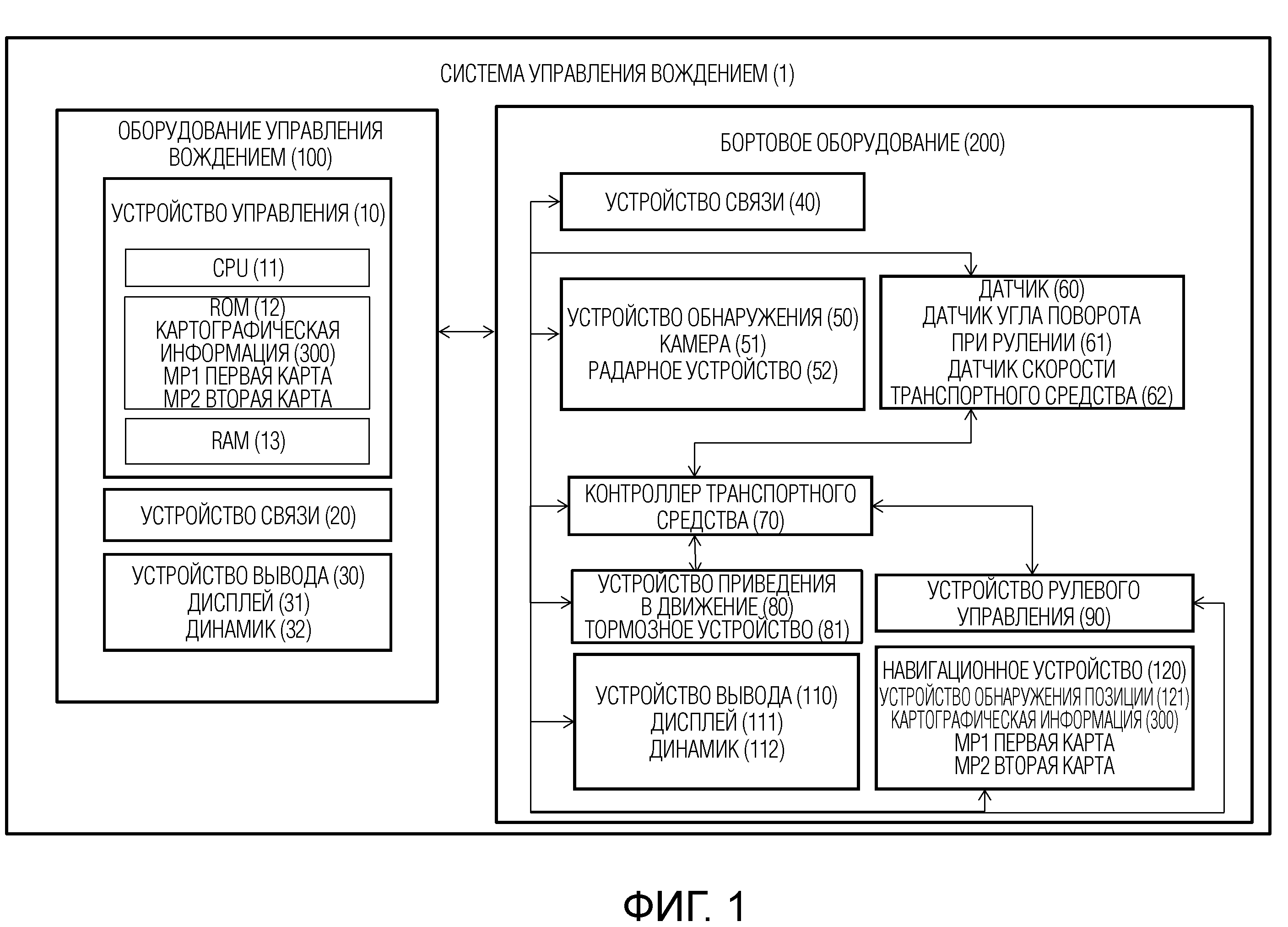
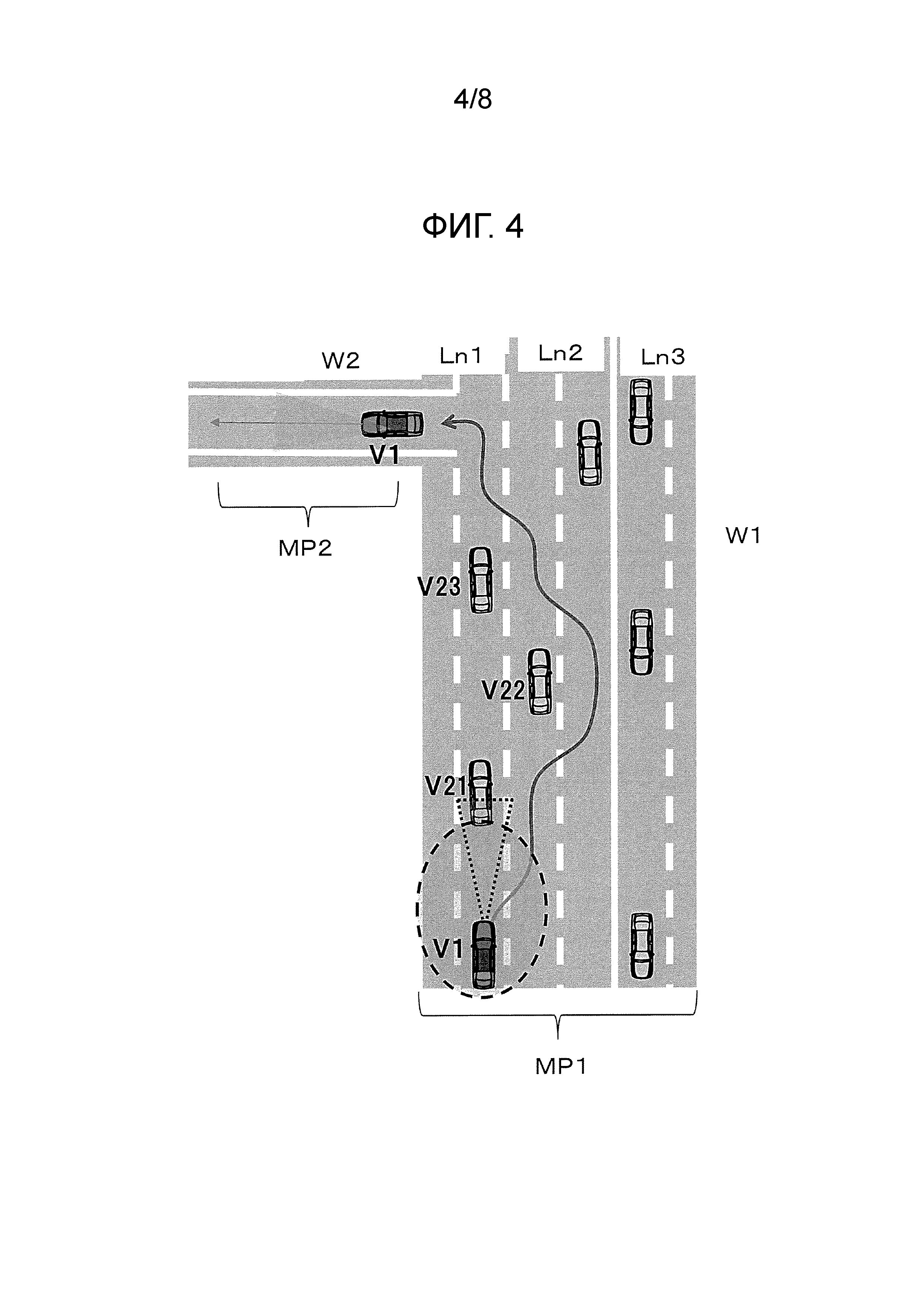
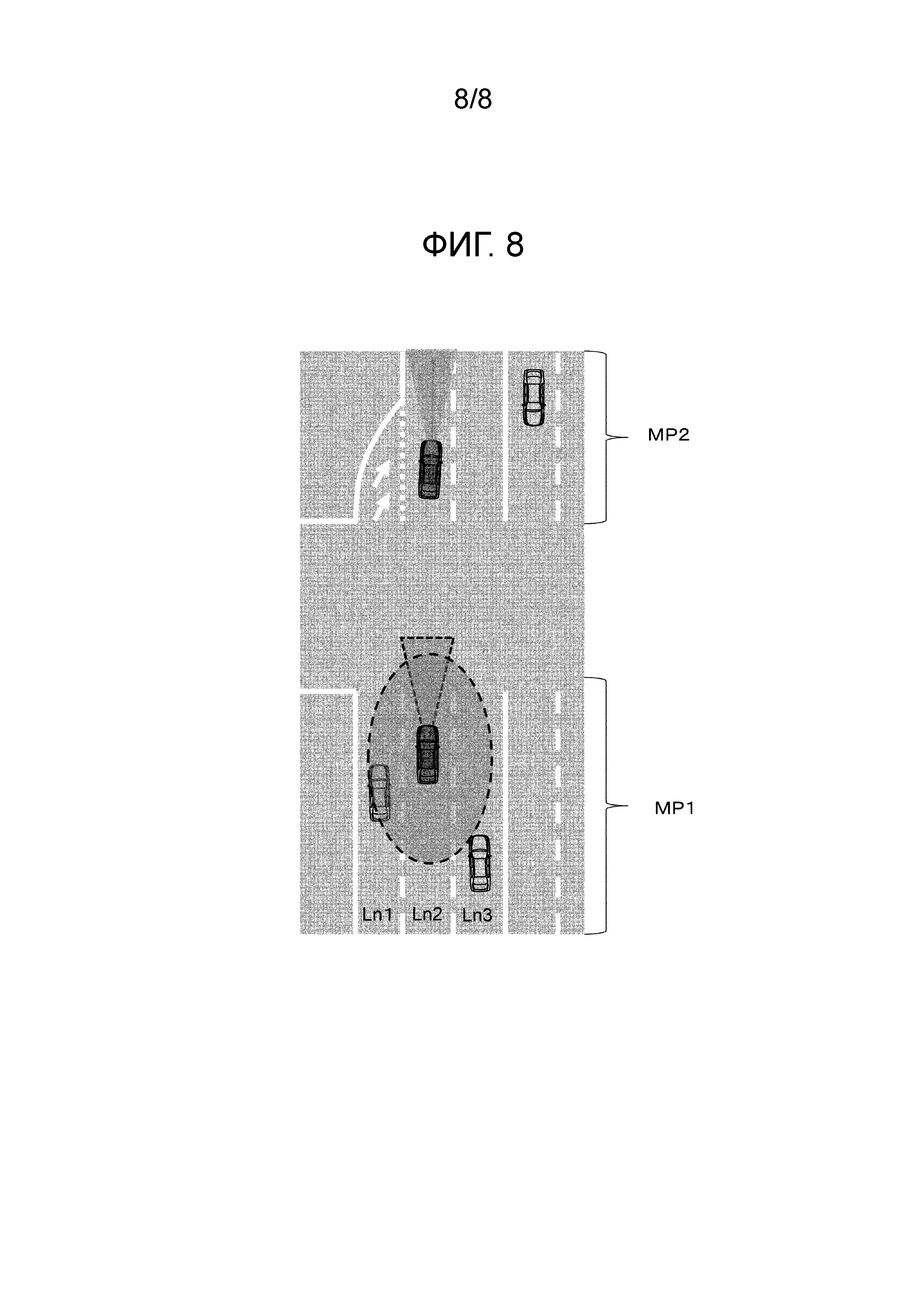
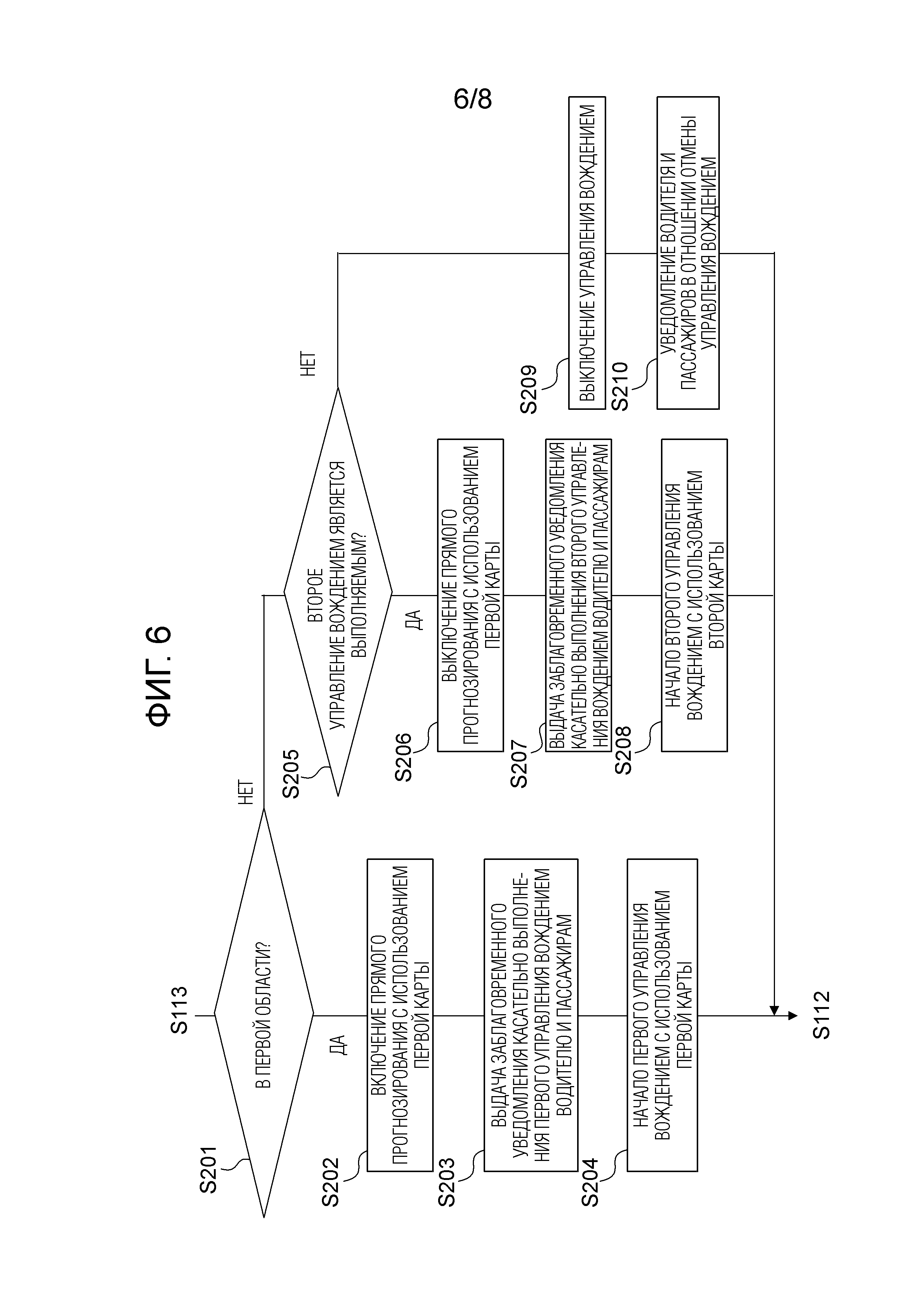
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ управления движением и устройство управления движением
Способ и устройство помощи при вождении
Способ и устройство помощи при вождении
Способ помощи при смене полосы движения и устройство помощи при смене полосы движения
Способ управления вождением и устройство управления вождением
Способ управления движением транспортного средства и устройство управления движением транспортного средства

