Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при вождении и к оборудованию помощи при вождении, которые помогают в вождении транспортного средства.
Уровень техники
[0002] Известно устройство или оборудование помощи при вождении, которое не допускает непосредственное восприятие посредством датчика, но когда ожидается существование потенциального движущегося объекта, такого как мотоцикл, присутствующий в мертвой зоне другого движущегося объекта, такого как автомобиль, оценивает возможный намеченный путь для того, чтобы вычислять риск контакта, и определяет действие при вождении на основе вычисленного риска контакта (патентный документ 1: JP2011-96105A).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2011-96105A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, когда восприятие посредством датчика является невозможным, и оценка возможного намеченного пути также является невозможной, риск контакта не может вычисляться, и действие при вождении не может определяться. Следовательно, если диапазон поиска при определении действия при вождении является широким, диапазон поиска с большой вероятностью должен заключать в себе диапазон, в котором восприятие посредством датчика является невозможным, и возникает такая проблема, что определение действия при вождении может быть затруднительным.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ помощи при вождении и оборудование помощи при вождении, которые позволяют подавлять возникновение ситуации, в которой определение действия при вождении является затруднительным.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему через извлечение пересекающей линии движения, которая представляет собой намеченный путь, по которому может перемещаться другое транспортное средство, и которая мешает запланированному намеченному пути движения рассматриваемого транспортного средства, выбор пересекающей линии движения другого транспортного средства, необходимой для определения действия при вождении рассматриваемого транспортного средства, из числа извлеченных пересекающих линий движения на основе, по меньшей мере, одного из формы дороги, правила дорожного движения и дорожной ситуации, определение действия при вождении рассматриваемого транспортного средства в ответ на другое транспортное средство, перемещающееся вдоль выбранной пересекающей линии движения, и когда состояние светофора, соответствующего выбранной пересекающей линии движения, изменяется из состояния разрешения проезда на состояние запрещения проезда, переключают выбранную пересекающую линию движения на невыбранную пересекающую линию движения посредством уменьшения длины выбранной пересекающей линии движения.
Преимущества изобретения
[0007] Согласно настоящему изобретению, диапазон для поиска при определении действия при вождении рассматриваемого транспортного средства может задаваться в качестве соответствующего диапазона в соответствии с необходимостью определения действия при вождении рассматриваемого транспортного средства. В силу этого можно подавлять возникновение диапазона, в котором восприятие является невозможным в диапазоне для поиска при определении действия при вождении, а также подавлять возникновение ситуации, в которой определение действия при вождении является затруднительным.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей систему помощи при вождении согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является схемой для описания способа извлечения линий движения других транспортных средств на перекрестке.
Фиг. 3 является схемой для описания процесса выбора необходимой линии движения в соответствии с состоянием светофоров на перекрестке.
Фиг. 4 является схемой для описания процесса выбора необходимой линии движения в соответствии с состоянием светофоров на перекрестке.
Фиг. 5 является графиком, иллюстрирующим взаимосвязь между истекшим временем (с) от изменения состояния светофора, соответствующего пересекающей линии движения, и вероятностью (%) того, что другое транспортное средство въезжает на перекресток.
Фиг. 6 является графиком, иллюстрирующим взаимосвязь между величиной уменьшения (м/с) в единицу времени длины необходимой линии движения и скоростью транспортного средства (м/с) для другого транспортного средства, въезжающего на перекресток вдоль пересекающей линии движения.
Фиг. 7 является схемой для описания процесса выбора необходимой линии движения на перекрестке в соответствии с запланированным намеченным путем движения параллельно движущегося транспортного средства и правилами дорожного движения.
Фиг. 8 является схемой для описания процесса выбора необходимой линии движения на перекрестке в соответствии с запланированным намеченным путем движения параллельно движущегося транспортного средства и правилами дорожного движения.
Фиг. 9 является схемой для описания процесса выбора необходимой линии движения на перекрестке в соответствии с запланированным намеченным путем движения параллельно движущегося транспортного средства и правилами дорожного движения.
Фиг. 10 является схемой для описания процесса выбора необходимой линии движения в соответствии с правилами дорожного движения на дороге.
Фиг. 11 является схемой для описания процесса выбора необходимой линии движения в соответствии с правилами дорожного движения на дороге.
Фиг. 12 является схемой для описания процесса выбора необходимой линии движения в соответствии с правилами дорожного движения на дороге.
Фиг. 13 является схемой для описания схемы определения действия при вождении в ответ на пересекающую линию движения другого транспортного средства, которое движется на перекрестке с правой стороны в запланированном намеченном пути движения рассматриваемого транспортного средства.
Фиг. 14 является схемой для описания схемы определения действия при вождении в ответ на пересекающую линию движения другого транспортного средства, которое поворачивает направо из встречной полосы движения и движется на перекрестке в запланированном намеченном пути движения рассматриваемого транспортного средства.
Фиг. 15 является блок-схемой последовательности операций способа для описания процесса выбора необходимой линии движения в соответствии с состоянием светофоров с использованием процессора оценки устройства оценки окружения.
Фиг. 16 является блок-схемой последовательности операций способа для описания процесса выбора необходимой линии движения в соответствии с запланированным намеченным путем движения параллельно движущегося транспортного средства и правилами дорожного движения с использованием процессора оценки процессора оценки.
Фиг. 17 является блок-схемой последовательности операций способа для описания процесса выбора необходимой линии движения в соответствии с правилами дорожного движения на дороге с использованием процессора оценки устройства оценки окружения.
Способы осуществления изобретения
[0009] В дальнейшем в этом документе, описываются один или более вариантов осуществления настоящего изобретения со ссылкой на чертежи. Фиг. 1 является схемой, иллюстрирующей блочную конфигурацию системы 1000 помощи при вождении согласно одному или более вариантов осуществления настоящего изобретения. Как проиллюстрировано на чертеже, система 1000 помощи при вождении содержит оборудование 100 помощи при вождении и бортовое оборудование 200. Оборудование 100 помощи при вождении может быть оснащено в транспортном средстве или также может применяться к портативным терминальным устройствам, которые могут обмениваться информацией с бортовым оборудованием 200. Примеры таких терминальных устройств включают в себя такое оборудование, как смартфон и PDA. Система 1000 помощи при вождении, оборудование 100 помощи при вождении, бортовое оборудование 200 и их различные устройства могут содержать арифметический процессор, к примеру, один или более CPU.
[0010] Бортовое оборудование 200 содержит контроллер 210 транспортного средства, навигационное устройство 220, устройство 230 обнаружения объектов, устройство 240 недопущения выезда за пределы полосы движения и устройство 250 вывода. Эти устройства, которые составляют бортовое оборудование 200, соединяются друг с другом через или другую бортовую LAN контроллерной сети (CAN), чтобы взаимно обмениваться информацией. Бортовое оборудование 200 может обмениваться информацией с оборудованием 100 помощи при вождении через такую бортовую LAN. Контроллер 210 транспортного средства работает совместно с устройством 260 обнаружения, приводным устройством 270 и устройством 280 рулевого управления.
[0011] Устройство 260 обнаружения содержит датчик 261 угла поворота при рулении, датчик 262 скорости транспортного средства и датчик 263 ориентации. Датчик 261 угла поворота при рулении обнаруживает величину руления, скорость руления, ускорение при рулении и т.п. и выводит сигналы обнаружения в контроллер 210 транспортного средства. Датчик 262 скорости транспортного средства определяет скорость и/или ускорение транспортного средства и выводит сигналы обнаружения в контроллер 210 транспортного средства. Датчик 263 ориентации обнаруживает позицию транспортного средства, угол наклона в продольном направлении транспортного средства, угол относительно вертикальной оси транспортного средства и угол крена транспортного средства и выводит сигналы обнаружения в контроллер 210 транспортного средства. Датчик 263 ориентации включает в себя гиродатчик.
[0012] Контроллер 210 транспортного средства, который представляет собой бортовой компьютер, такой как модуль управления двигателем (ECU), управляет приведением в движение для обеспечения движения, торможением и рулением транспортного средства. Транспортное средство согласно одному или более вариантов осуществления настоящего изобретения может представлять собой, например, электромобиль, имеющий электромотор в качестве источника приведения в движение для обеспечения движения, автомобиль с двигателем, имеющий двигатель внутреннего сгорания в качестве источника приведения в движение для обеспечения движения, или гибридный автомобиль, имеющий как электромотор, так и двигатель внутреннего сгорания в качестве источников приведения в движение для обеспечения движения, и т.п. Примеры электромобиля или гибридного автомобиля, имеющего электромотор в качестве источника приведения в движение для обеспечения движения, включают в себя тип, в котором источник мощности для электромотора представляет собой аккумуляторную батарею, и тип, в котором источник мощности для электромотора представляет собой топливный элемент.
[0013] Приводное устройство 270 содержит электромотор и/или двигатель внутреннего сгорания в качестве вышеописанных источников приведения в движение для обеспечения движения, устройство передачи мощности, включающее в себя ведущий вал и автоматическую трансмиссию, которые передают выходную мощность источника или источников приведения в движение для обеспечения движения на ведущие колеса, тормозное устройство 271, которое тормозит колеса, и другие необходимые компоненты. Приводное устройство 270 выполняет управление движением, включающее в себя ускорение и замедление транспортного средства, на основе управляющих сигналов, полученных из контроллера 210 транспортного средства, или входных сигналов посредством операции нажатия педали акселератора и операции нажатия педали тормоза. В случае гибридного автомобиля, отношение крутящего момента, выводимого в электромотор, и крутящего момента, выводимого в двигатель внутреннего сгорания в соответствии с состоянием движения транспортного средства, также выводится из контроллера 210 транспортного средства в приводное устройство 270.
[0014] Устройство 280 рулевого управления включает в себя исполнительное устройство рулевого управления. Исполнительное устройство рулевого управления включает в себя электромотор и другие обязательные компоненты, присоединенные к валу рулевой колонки. Устройство 280 рулевого управления выполняет управление варьированием направления движения транспортного средства на основе управляющих сигналов, полученных из контроллера 210 транспортного средства, или входных сигналов посредством операции руления.
[0015] Контроллер 210 транспортного средства выводит управляющие сигналы в приводное устройство 270 и устройство 280 рулевого управления на основе плана действий при вождении, который выводится из устройства 20 планирования действий при вождении оборудования 100 помощи при вождении. Здесь, управление приводным устройством 270 и/или управление устройством 280 рулевого управления могут выполняться полностью автоматизированным способом или в форме помощи в операции вождения (операции движения) водителя. В этом случае, управление приводным устройством 270 и управление устройством 280 рулевого управления приостанавливается/отменяется посредством операции вмешательства водителя, такой как руление и торможение.
[0016] Навигационное устройство 220 вычисляет намеченный путь из текущей позиции рассматриваемого транспортного средства в место назначения. Схема вычисления намеченного пути может быть известной схемой на момент подачи настоящей заявки на основе алгоритма поиска по графу, такого как алгоритм Дейкстры или алгоритм A*-поиска. Вычисленный намеченный путь выводится в оборудование 100 помощи при вождении, чтобы использоваться для помощи при вождении для рассматриваемого транспортного средства. Вычисленный намеченный путь также представляется в качестве информации навигации на основе инструкций по намеченному пути посредством устройства 250 вывода.
[0017] Навигационное устройство 220 включает в себя устройство 221 обнаружения позиции. Устройство 221 обнаружения позиции взаимодействует с глобальной системой позиционирования (GPS) и обнаруживает позицию движения (широту/долготу) для движения транспортного средства.
[0018] Навигационное устройство 220 включает в себя базу данных, которая сохраняет доступную картографическую информацию 222, информацию 223 дороги и информацию 224 правил дорожного движения. Достаточно того, что база данных, сохраняющая картографическую информацию 222, информацию 223 дороги и информацию 224 правил дорожного движения, может считываться посредством навигационного устройства 220, и база данных может быть выполнена с возможностью быть физически отделенной от навигационного устройства 220 или также может сохраняться на сервере, из которого сохраненная информация может считываться через сеть связи.
[0019] Картографическая информация 222 представляет собой так называемую электронную карту, которая представляет информацию, в которой широта и долгота ассоциированы с картографической информацией. Картографическая информация 222 включает в себя информацию 223 дороги, которая ассоциирована с каждой точкой.
[0020] Информация 223 дороги задается посредством узлов и соединений, соединяющихся между узлами. Информация 223 дороги включает в себя информацию для указания дороги посредством позиции/области дороги, информацию относительно типа дороги и ширины дороги для каждой дороги и другую информацию относительно дорог. Информация 223 дороги также включает в себя информацию относительно перекрестка, которая ассоциирована с идентификационной информацией каждого соединения дорог. Информация относительно перекрестка включает в себя информацию относительно позиции перекрестка, направления въезда на перекресток, типа перекрестка и линий движения на перекрестке. Информация 223 дороги дополнительно включает в себя информацию относительно конфигурации дороги, того, разрешается или нет движение прямо вперед, взаимосвязи приоритетов при движении, того, разрешается или нет обгон (разрешается или нет смена полосы движения на смежную полосу движения), присутствия или отсутствия светофора и т.д., в качестве информации относительно дороги, которая ассоциирована с идентификационной информацией каждого соединения дорог.
[0021] Информация 224 правил дорожного движения представляет собой информацию относительно правил дорожного движения по намеченному пути, таких как "остановка", "парковка запрещена"/"остановка запрещена", "сбавьте скорость" и "ограничение скорости", которых транспортное средство должно придерживаться при движении. Каждое правило дорожного движения задается для каждой точки (широты, долготы) и каждого соединения. Информация 224 правил дорожного движения может включать в себя информацию относительно светофоров, которая получается из оборудования, предоставленного на обочине.
[0022] Устройство 230 обнаружения объектов обнаруживает существование и существующие позиции объектов, включающих в себя помехи, которые могут существовать рядом с рассматриваемым транспортным средством. Хотя не ограничено конкретным образом, устройство 230 обнаружения объектов включает в себя камеру 231. Примеры камеры 231 включают в себя устройство формирования изображений, содержащее элемент формирования изображений, такой как CCD, камеру для съемки в инфракрасном диапазоне и стереокамеру. Камера 231 располагается в определенной позиции рассматриваемого транспортного средства и захватывает изображения объектов рядом с рассматриваемым транспортным средством. Термин "рядом с рассматриваемым транспортным средством" при использовании в данном документе охватывает понятия "впереди рассматриваемого транспортного средства", "позади рассматриваемого транспортного средства", "спереди сбоку рассматриваемого транспортного средства", и "сзади сбоку рассматриваемого транспортного средства". Примеры объектов, изображение которых формируется посредством камеры 231, включают в себя стационарные объекты, такие как светофоры и дорожные знаки, движущиеся объекты, такие как пешеходы и другие транспортные средства, к примеру, двухколесные транспортные средства и четырехколесные транспортные средства, и дорожные сооружения, такие как дорожные ограждения, разделительные полосы и бордюрные камни.
[0023] Устройство 230 обнаружения объектов может анализировать данные изображений и идентифицировать тип объекта на основе результата анализа. В этом случае, устройство 230 обнаружения объектов использует технологию сопоставления с шаблоном и т.п. для того, чтобы идентифицировать то, представляет собой объект, включенный в данные изображений, транспортное средство, пешехода или дорожный знак либо нет. Помимо этого или альтернативно, устройство 230 обнаружения объектов может обрабатывать полученные данные изображений, чтобы определять расстояние от рассматриваемого транспортного средства до объекта, присутствующего рядом с рассматриваемым транспортным средством, или относительную позиционную взаимосвязь между объектом и рассматриваемого транспортного средства на основе позиции объекта.
[0024] Устройство 230 обнаружения объектов может включать в себя радарное устройство 232. Примеры радарного устройства 232 включают в себя такие радарные устройства, как радар миллиметрового диапазона, лазерный радар и ультразвуковой радар, которые имеют схемы, известные на момент подачи настоящей заявки. Устройство 230 обнаружения объектов обнаруживает присутствие или отсутствие объектов, позиции объектов и расстояния до объектов на основе принимаемых сигналов из радарного устройства 232. Устройство 230 обнаружения объектов может обнаруживать присутствие или отсутствие объектов, позиции объектов и расстояния до объектов на основе результатов кластеризации информации облаков точек, которая получается с использованием лазерного радара.
[0025] Когда рассматриваемое транспортное средство и другое транспортное средство допускают связь между транспортными средствами, устройство 230 обнаружения объектов может получать скорость и ускорение транспортного средства для другого транспортного средства, которые обнаруживаются посредством датчика скорости транспортного средства для другого транспортного средства, в качестве информации объектов. Помимо этого или альтернативно, устройство 230 обнаружения объектов может получать информацию объектов, которая включает в себя позицию, скорость и ускорение другого транспортного средства, из внешних устройств интеллектуальных транспортных систем (ITS).
[0026] Устройство 240 недопущения выезда за пределы полосы движения включает в себя камеру 241 и базу данных, которая сохраняет информацию 242 дороги. Камера 231 устройства обнаружения объектов может совместно использоваться в качестве камеры 241. Информация 223 дороги навигационного устройства может совместно использоваться в качестве информации 242 дороги. Устройство 240 недопущения выезда за пределы полосы движения имеет функцию недопущения выезда за пределы полосы движения (функцию помощи для удержания на полосе движения) для распознавания полосы движения, в которой движется рассматриваемое транспортное средство, из изображений, захваченных посредством камеры 241, и управления поведением при передвижении рассматриваемого транспортного средства таким образом, чтобы сохранять определенную взаимосвязь между позицией разделительной линии полосы движения и позицией рассматриваемого транспортного средства. Оборудование 100 помощи при вождении планирует действие при вождении таким образом, что рассматриваемое транспортное средство движется по центру полосы движения. Помимо этого или альтернативно, оборудование 100 помощи при вождении может планировать действие при вождении таким образом, что расстояние от разделительной линии полосы движения до рассматриваемого транспортного средства в направлении ширины дороги попадает в предварительно определенный диапазон значения. Разделительная линия не ограничена при условии, что она имеет функцию задания полосы движения. Разделительная линия может представлять собой схематическую метку, нарисованную на поверхности дороги, насаждения, которые существуют между полосами движения, или дорожное сооружение, которое существует на стороне обочины дороги полосы движения, такое как дорожное ограждение, бордюрный камень, тротуар или дорога с ограниченным доступом для двухколесных транспортных средств. Разделительная линия также может представлять собой фиксированную конструкцию, которая присутствует на стороне обочины дороги по отношению к полосе движения, такую как рекламный модуль, дорожный знак, магазин или придорожное дерево.
[0027] Процессор 11 оценки, который описывается ниже, сохраняет объект, обнаруженный посредством устройства 230 обнаружения объектов, так что обнаруженный объект ассоциирован с намеченным путем. Другими словами, процессор 11 оценки хранит информацию в отношении того, на каком намеченном пути существует объект.
[0028] Бортовое оборудование 200 включает в себя устройство 250 вывода. Устройство 250 вывода включает в себя дисплей 251 и динамик 252. Устройство 250 вывода выводит различные информационные элементы относительно помощи при вождении пользователю или пассажирам окружающих транспортных средств. Различные информационные элементы относительно помощи при вождении включают в себя информационные элементы относительно плана действий при вождении и управления движением на основе плана действий при вождении. Устройство 250 вывода предварительно информирует пассажиров рассматриваемого транспортного средства в отношении того, что операция руления и/или ускорение или замедление должны выполняться, через дисплей 251 и/или динамик 252, в качестве информации в соответствии с управляющей информацией для движения рассматриваемого транспортного средства по запланированному намеченному пути движения. Помимо этого или альтернативно, пассажиры рассматриваемого транспортного средства или пассажиры других транспортных средств могут заранее информироваться в отношении таких информационных элементов относительно помощи при вождении через внешние лампы и/или внутренние лампы. Помимо этого или альтернативно, различные информационные элементы относительно помощи при вождении могут выводиться во внешние устройства интеллектуальных транспортных систем (ITS) и т.п. через сеть связи.
[0029] Оборудование 100 помощи при вождении содержит устройство 10 оценки окружения, устройство 20 планирования действий при вождении и устройство 30 вывода. Устройство 30 вывода достигает функций, идентичных функциям вышеописанного устройства 250 вывода бортового оборудования 200, с использованием дисплея 251 и динамика 252. Эти устройства могут обмениваться информацией друг с другом через линии проводной или беспроводной связи.
[0030] Устройство 10 оценки окружения включает в себя процессор 11 оценки, который служит в качестве устройства управления устройства 10 оценки окружения. Процессор 11 оценки представляет собой вычислительное устройство, которое используется, при определении действия при вождении рассматриваемого транспортного средства, для того, чтобы оценивать окружение, с которым встречается рассматриваемое транспортное средство, движущееся по намеченному пути. В частности, процессор 11 оценки представляет собой компьютер, содержащий постоянное запоминающее устройство (ROM), которое сохраняет программы для выполнения процесса оценки окружения, с которым встречается рассматриваемое транспортное средство, центральный процессор (CPU) в качестве функциональной схемы, которая выполняет программы, сохраненные в ROM, так что он служит в качестве устройства 10 оценки окружения, и оперативное запоминающее устройство (RAM), которое служит в качестве доступного устройства хранения данных. Процессор 11 оценки содержит носитель хранения данных, который сохраняет программы для выполнения процесса оценки окружения, с которым встречается рассматриваемое транспортное средство.
[0031] Процессор 11 оценки устройства 10 оценки окружения выполняет следующие процессы:
(1) процесс получения текущей позиции рассматриваемого транспортного средства и целевого намеченного пути (процесс получения информации рассматриваемого транспортного средства);
(2) процесс получения информации внешнего мира рядом с рассматриваемым транспортным средством (процесс получения информации внешнего мира);
(3) процесс извлечения линий движения других транспортных средств, имеющих точки пересечения (пересекающие точки) с запланированным намеченным путем движения рассматриваемого транспортного средства (эти линии движения в дальнейшем называются "пересекающими линиями движения") (процесс извлечения пересекающих линий движения); и
(4) процесс выбора пересекающей линии движения, необходимой для определения действия при вождении (в дальнейшем называемой "необходимой линией движения"), из числа извлеченных пересекающих линий движения (процесс выбора необходимой линии движения).
[0032] Термин "линии движения" при использовании в данном документе означает понятия, включающие в себя не только линии, для которых ширина может быть непонятной, но также и линии, такие как полосы движения и дороги, для которых ширина является понятной.
[0033] Процессор 11 оценки имеет блок, который реализует функцию получения информации рассматриваемого транспортного средства, блок, который реализует функцию получения информации внешнего мира, блок, который реализует функцию извлечения линии движения, и блок, который реализует процесс выбора линии движения. Процессор 11 оценки выполняет каждую из вышеуказанных функций посредством взаимодействия программного обеспечения для реализации каждой функции и вышеописанных аппаратных средств.
[0034] В процессе получения информации рассматриваемого транспортного средства, процессор 11 оценки получает текущую позицию рассматриваемого транспортного средства и целевой намеченный путь из текущей позиции рассматриваемого транспортного средства в место назначения из навигационного устройства 220. В процессе получения информации внешнего мира, процессор 11 оценки получает информацию внешнего мира, включающую в себя состояние светофоров рядом с рассматриваемым транспортным средством, присутствие или отсутствие других транспортных средств, движущихся параллельно и т.д., из устройства 230 обнаружения объектов или с использованием сети связи.
[0035] В процессе извлечения пересекающих линий движения, процессор 11 оценки вычисляет запланированный намеченный путь движения рассматриваемого транспортного средства на основе текущей позиции рассматриваемого транспортного средства, целевого намеченного пути, картографической информации 222 и информации 223 дороги и извлекает линии движения других транспортных средств, имеющие точки пересечения (пересекающие точки) с запланированным намеченным путем движения рассматриваемого транспортного средства. Процессор 11 оценки вычисляет запланированный намеченный путь движения, который отличается от целевого намеченного пути, вычисленного посредством навигационного устройства 220, и в котором указывается даже полоса движения для рассматриваемого транспортного средства. Примеры способа вычисления запланированного намеченного пути движения включают в себя способы вычисления на основе алгоритма поиска по графу, такого как алгоритм Дейкстры или алгоритм A*-поиска. Такой способ вычисления включает в себя задание соединений, которые представляют намеченный путь движения, и узлов, которые представляют собой точки, в которых соединения соединяются друг с другом, и задание взвешивания для каждого из соединений. Здесь, взвешивание задается небольшим для рекомендуемого соединения, соответствующего полосе движения для движения к месту назначения, и задается большим для соединения, которое не представляет собой рекомендуемое соединение. Затем полоса движения, в которой общая сумма взвешиваний из текущей позиции рассматриваемого транспортного средства в место назначения является небольшой, указывается в качестве полосы движения запланированного намеченного пути движения.
[0036] Процессор 11 оценки обращается к информации 223 дороги, чтобы извлекать пересекающие линии движения других транспортных средств. Информация относительно пересекающих линий движения может получаться из базы данных, оснащенной в рассматриваемом транспортном средстве, или также может получаться из внешней базы данных через сеть связи.
[0037] Фиг. 2 является схемой для описания способа извлечения пересекающих линий 2 движения других транспортных средств на перекрестке. На чертеже, запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1 указывается посредством сплошной жирной линии, и линии движения других транспортных средств указываются посредством сплошных тонких линий или штрихпунктирных линий. Как проиллюстрировано на чертеже, одна линия движения существует в каждой полосе движения, и линии движения, указываемые посредством сплошных тонких линий, представляют собой пересекающие линии 2 движения других транспортных средств, извлеченные посредством процессора 11 оценки. Длины пересекающих линий 2 движения других транспортных средств задаются равными достаточным длинам для рассматриваемого транспортного средства V1, чтобы определять действие при вождении.
[0038] В процессе выбора необходимой линии движения, процессор 11 оценки выбирает необходимую линию движения из числа пересекающих линий 2 движения других транспортных средств, извлеченных в процессе извлечения пересекающих линий движения. Примеры способа выбора необходимой линии движения включают в себя способ выбора необходимой линии движения в соответствии с состоянием светофоров, способ выбора необходимой линии движения в соответствии с запланированными намеченными путями движения других транспортных средств, движущихся параллельно рассматриваемому транспортному средству V1, и уровнем приоритета по правилам дорожного движения, и способ выбора необходимой линии движения в соответствии с правилами дорожного движения.
[0039] Функция выбора линии движения процессора 11 оценки включает в себя функцию управления информацией о сигналах. В процессе управления информацией о сигналах, процессор 11 оценки управляет информацией относительно светофоров, полученной посредством устройства 230 обнаружения объектов, и выбирает необходимую линию движения в соответствии с состоянием светофоров. Функция управления информацией о сигналах включает в себя функцию переключения состояний сигнала. В процессе переключения состояния сигнала, процессор 11 оценки переключает необходимую линию движения, когда состояние светофоров изменяется. Информация относительно светофоров также может получаться через сеть связи.
[0040] Фиг. 3 и фиг. 4 являются схемами для описания процесса выбора необходимой линии движения в соответствии с состоянием светофоров 3A-3D на перекрестке. Как проиллюстрировано на этих чертежах, когда светофор 3B, соответствующий запланированному намеченному пути 1 движения рассматриваемого транспортного средства V1, присутствует на перекрестке, процессор 11 оценки ассоциирует пересекающие линии 2 движения других транспортных средств со светофорами в процессе управления информацией о сигналах. Отношение соответствия между линией движения каждой полосы движения и светофором включено в информацию 223 дороги, и процессор 11 оценки считывает отношения соответствия между пересекающими линиями 2 движения других транспортных средств и светофоров из информации 223 дороги. В окружении, проиллюстрированном на фиг. 3, светофор 3A соответствует пересекающей линии 2 движения, которая сливается с запланированным намеченным путем 1 движения рассматриваемого транспортного средства V1 слева, светофор 3C соответствует пересекающей линии 2 движения, которая пересекается с запланированным намеченным путем 1 движения рассматриваемого транспортного средства V1 спереди, и светофор 3D соответствует пересекающей линии 2 движения, которая пересекается с запланированным намеченным путем 1 движения рассматриваемого транспортного средства V1 справа.
[0041] Процессор 11 оценки получает информацию относительно светофоров, соответствующих пересекающим линиям 2 движения других транспортных средств, посредством устройства 230 обнаружения объектов или через сеть связи. Процессор 11 оценки определяет то, находятся светофоры, соответствующие пересекающим линиям 2 движения других транспортных средств, в состоянии разрешения проезда, таком как зеленый сигнал или сигнал с прямой стрелкой, или в состоянии запрещения проезда, таком как красный сигнал. Затем процессор 11 оценки выбирает пересекающую линию 2 движения, соответствующую светофору в состоянии разрешения проезда, в качестве необходимой линии движения, при одновременном исключении пересекающих линий 2 движения, соответствующих светофорам в состоянии запрещения проезда, из возможных вариантов для необходимой линии движения.
[0042] В окружении, проиллюстрированном на фиг. 4, светофор 3A, соответствующий пересекающей линии 2 движения, которая сливается с запланированным намеченным путем 1 движения рассматриваемого транспортного средства V1 слева, имеет красный сигнал и в силу этого находится в состоянии запрещения проезда, и пересекающая линия 2 движения, соответствующая светофору 3A, за счет этого исключается из возможных вариантов для необходимой линии движения. Аналогично, светофор 3D, соответствующий пересекающей линии 2 движения, которая пересекается с запланированным намеченным путем 1 движения рассматриваемого транспортного средства V1 справа, имеет красный сигнал и в силу этого находится в состоянии запрещения проезда, и пересекающая линия 2 движения, соответствующая светофору 3D, за счет этого исключается из возможных вариантов для необходимой линии движения. С другой стороны, светофор 3C, соответствующий пересекающей линии 2 движения, которая пересекается с запланированным намеченным путем 1 движения рассматриваемого транспортного средства V1 спереди, имеет зеленый сигнал и в силу этого находится в состоянии разрешения проезда, и пересекающая линия 2 движения, соответствующая светофору 3C, за счет этого выбирается в качестве необходимой линии движения.
[0043] В процессе переключения состояния сигнала, процессор 11 оценки определяет то, изменено состояние светофора из состояния разрешения проезда на состояние запрещения проезда или из состояния запрещения проезда на состояние разрешения проезда. После этого, когда состояние светофора изменено из состояния разрешения проезда на состояние запрещения проезда, процессор 11 оценки вычисляет время задержки от изменения состояния светофора до переключения необходимой линии движения.
[0044] Здесь, фиг. 5 является графиком, иллюстрирующим взаимосвязь между истекшим временем (с) от изменения состояния светофора, соответствующего пересекающей линии 2 движения, и вероятностью (%) того, что другое транспортное средство въезжает на перекресток. Как указано посредством сплошной линии на графике, когда состояние светофора, соответствующего пересекающей линии 2 движения, изменяется из состояния разрешения проезда на состояние запрещения проезда, вероятность того, что другое транспортное средство въезжает на перекресток вдоль пересекающей линии 2 движения, уменьшается со временем с высокой вероятности сразу после изменения. С другой стороны, как указано посредством пунктирной линии на графике по фиг. 5, когда состояние светофора, соответствующего пересекающей линии 2 движения, изменяется из состояния запрещения проезда на состояние разрешения проезда, вероятность того, что другое транспортное средство въезжает на перекресток вдоль пересекающей линии 2 движения, увеличивается со временем с низкой вероятности сразу после изменения.
[0045] Таким образом, до тех пор, пока определенный период времени (например, несколько секунд) не истекает от момента сразу после того, как светофор, соответствующий пересекающей линии 2 движения, выбранной в качестве необходимой линии движения, изменяется из состояния разрешения проезда на состояние запрещения проезда, остается вероятность того, что другое транспортное средство въезжает на перекресток вдоль пересекающей линии 2 движения. С другой стороны, вероятность того, что другое транспортное средство въезжает на перекресток вдоль пересекающей линии 2 движения, увеличивается за относительно короткий период времени сразу после того, как состояние светофора, соответствующего пересекающей линии 2 движения, изменяется из состояния запрещения проезда на состояние разрешения проезда.
[0046] Процессор 11 оценки в силу этого исключает пересекающую линию 2 движения, выбранную в качестве необходимой линии движения из возможных вариантов для необходимой линии движения в момент времени, когда предварительно определенное время задержки (например, несколько секунд) истекает после того, как светофор, соответствующий пересекающей линии 2 движения, выбранной в качестве необходимой линии движения, изменяется из состояния разрешения проезда на состояние запрещения проезда, и выбирает пересекающую линию 2 движения, исключенную из возможных вариантов для необходимой линии движения, в качестве необходимой линии движения сразу после того, как светофор, соответствующий пересекающей линии 2 движения, изменяется из состояния запрещения проезда на состояние разрешения проезда. Это является ответом на другое транспортное средство, въезжающее на перекресток после того, как состояние светофоров переключается.
[0047] Здесь, когда светофор, соответствующий пересекающей линии 2 движения, выбранной в качестве необходимой линии движения, изменяется из состояния разрешения проезда на состояние запрещения проезда, процессор 11 оценки постепенно уменьшает длину пересекающей линии движения, выбранной в качестве необходимой линии движения, до тех пор, пока предварительно определенное время задержки не истекает от изменения, в итоге до нуля, когда предварительно определенное время задержки истекает.
[0048] Фиг. 6 является графиком, иллюстрирующим взаимосвязь между величиной уменьшения (м/с) в единицу времени длины пересекающей линии 2 движения, выбранной в качестве необходимой линии движения, и скоростью транспортного средства (м/с) для другого транспортного средства, въезжающего на перекресток вдоль пересекающей линии 2 движения, выбранной в качестве необходимой линии движения. Как проиллюстрировано на графике, когда светофор, соответствующий пересекающей линии 2 движения, выбранной в качестве необходимой линии движения, изменен из состояния разрешения проезда на состояние запрещения проезда, процессор 11 оценки уменьшает длину пересекающей линии 2 движения, выбранной в качестве необходимой линии движения в величине уменьшения в единицу времени в соответствии со скоростью транспортного средства для другого транспортного средства, въезжающего на перекресток вдоль пересекающей линии 2 движения. Здесь, по мере того, как скорость транспортного средства для другого транспортного средства увеличивается, величина уменьшения в расчете на единицу длины пересекающей линии 2 движения в качестве необходимой линии движения уменьшается, чтобы за счет этого предоставлять возможность определения действия при вождении в ответ на другое транспортное средство, движущееся вдоль пересекающей линии 2 движения на высокой скорости.
[0049] Функция выбора линии движения процессора 11 оценки включает в себя функцию управления информацией окружения. В процессе управления информацией окружения, когда запланированный намеченный путь движения другого транспортного средства, движущегося параллельно рассматриваемому транспортному средству V1 (в дальнейшем называемого "параллельно движущимся транспортным средством"), пересекается с пересекающей линией 2 движения еще одного другого транспортного средства, процессор 11 оценки выбирает необходимую линию движения в соответствии с уровнем приоритета по правилам дорожного движения. Запланированный намеченный путь движения параллельно движущегося транспортного средства получается посредством устройства 230 обнаружения объектов.
[0050] Фиг. 7-9 являются схемами для описания процесса выбора необходимой линии движения на перекрестке в соответствии с запланированным намеченным путем 4 движения параллельно движущегося транспортного средства V2 и уровнем приоритета по правилам дорожного движения. Как проиллюстрировано на этих чертежах, когда параллельно движущееся транспортное средство V2, въезжающее на перекресток, существует, процессор 11 оценки вычисляет запланированный намеченный путь 4 движения параллельно движущегося транспортного средства V2 в процессе управления информацией окружения. В процессе вычисления запланированного намеченного пути 4 движения параллельно движущегося транспортного средства V2, во-первых, процессор 11 оценки получает информацию относительно позиций, скоростей и векторов перемещения других транспортных средств рядом с рассматриваемым транспортным средством V1 из устройства 230 обнаружения объектов. Информация относительно других транспортных средств рядом с рассматриваемым транспортным средством V1 также может получаться посредством связи между транспортными средствами или связи между транспортным средством и дорожной инфраструктурой.
[0051] Процессор 11 оценки сравнивает вектор 5 (см. фиг. 8) параллельно движущегося транспортного средства V2, полученный из устройства 230 обнаружения объектов и т.п., с линией 6 движения параллельно движущегося транспортного средства V2 на полосе движения. Когда вектор 5 и линия 6 движения находятся в идентичном направлении, процессор 11 оценки использует линию 6 движения на полосе движения в качестве запланированного намеченного пути 4 движения параллельно движущегося транспортного средства V2.
[0052] Как проиллюстрировано на фиг. 9, когда запланированный намеченный путь 4 движения параллельно движущегося транспортного средства V2 пересекается с пересекающей линией 2 движения другого транспортного средства V3, процессор 11 оценки вычисляет уровни приоритета параллельно движущегося транспортного средства V2 и другого транспортного средства V3, движущегося по пересекающей линии 2 движения. Здесь, уровни приоритета транспортных средств, проезжающих через перекресток, определяются посредством правил дорожного движения. Например, как проиллюстрировано на фиг. 9, параллельно движущееся транспортное средство V2 имеет более высокий уровень приоритета, чем уровень приоритета другого транспортного средства V3, поворачивающего направо на перекрестке, поскольку параллельно движущееся транспортное средство V2 движется прямо вперед на встречной полосе движения. Процессор 11 оценки в силу этого вычисляет уровни приоритета параллельно движущегося транспортного средства V2, движущегося по запланированному намеченному пути 4 движения, и другого транспортного средства V3, движущегося по пересекающей линии 2 движения, на основе правил дорожного движения.
[0053] Когда уровень приоритета параллельно движущегося транспортного средства V2, движущегося по запланированному намеченному пути 4 движения, выше уровня приоритета другого транспортного средства V3, движущегося по пересекающей линии 2 движения, процессор 11 оценки исключает пересекающую линию 2 движения из возможных вариантов для необходимой линии движения. С другой стороны, когда уровень приоритета параллельно движущегося транспортного средства V2, движущегося по запланированному намеченному пути 4 движения, ниже уровня приоритета другого транспортного средства V3, движущегося по пересекающей линии 2 движения, процессор 11 оценки выбирает пересекающую линию 2 движения в качестве необходимой линии движения.
[0054] Процессор 11 оценки включает в себя функцию анализа факторов состояния запрещения проезда. В процессе анализа факторов состояния запрещения проезда, процессор 11 оценки анализирует правила дорожного движения дороги исключать пересекающую линию 2 движения, через которую проезд другого транспортного средства V3 ограничивается вследствие правил дорожного движения, из возможных вариантов для необходимой линии движения (см. фиг. 10-12). Процессор 11 оценки обращается к информации 223 дороги и информации 224 правил дорожного движения для того, чтобы извлекать правила дорожного движения, ассоциированные с полосой движения, которой принадлежит запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1, и полосой движения, которой принадлежит пересекающая линия 2 движения, и извлекает фактор, который ограничивает движение другого транспортного средства V3, из числа извлеченных правил дорожного движения. Затем процессор 11 оценки проводит перекрестную проверку извлеченного фактора с пересекающей линией 2 движения для того, чтобы определять то, ограничивается или нет движение другого транспортного средства V3 по пересекающей линии 2 движения вследствие ограничения движения для другого транспортного средства V3 по правилам дорожного движения, и исключает ограниченную пересекающую линию 2 движения из возможных вариантов для необходимой линии движения.
[0055] Фиг. 10-12 являются схемами для описания процессов выбора необходимой линии движения в соответствии с правилами дорожного движения на дороге. В окружении, проиллюстрированном на фиг. 10, дорога, которой принадлежит пересекающая линия 2 движения, имеет ограничение "проезд запрещен" для транспортных средств вследствие правила дорожного движения "одностороннее движение", и направление движения вдоль пересекающей линии 2 движения является противоположным направлению движения в соответствии с правилом дорожного движения "одностороннее движение". В этом случае, процессор 11 оценки извлекает фактор "проезд запрещен" для транспортных средств вследствие правила дорожного движения "одностороннее движение", проводит перекрестную проверку этого фактора с пересекающей линией 2 движения другого транспортного средства V3, определяет то, что движение другого транспортного средства V3 по пересекающей линии 2 движения ограничивается, и исключает пересекающую линию 2 движения из возможных вариантов для необходимой линии движения.
[0056] В окружении, проиллюстрированном на фиг. 11, дорога, которой принадлежит пересекающая линия 2 движения другого транспортного средства V3, имеет ограничение "левый поворот запрещен" для транспортных средств вследствие правила дорожного движения "следуйте в этом направлении", и въезд другого транспортного средства V3 на дорогу, которой принадлежит запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1, ограничивается. В этом случае, процессор 11 оценки извлекает фактор "проезд запрещен" для транспортных средств вследствие правила дорожного движения "следуйте в этом направлении", проводит перекрестную проверку этого фактора с пересекающей линией 2 движения другого транспортного средства V3, определяет то, что движение другого транспортного средства V3 по пересекающей линии 2 движения ограничивается, и исключает пересекающую линию 2 движения из возможных вариантов для необходимой линии движения.
[0057] В окружении, проиллюстрированном на фиг. 12, дорога, которой принадлежит пересекающая линия 2 движения другого транспортного средства V3, имеет ограничение временного запрета въезда вследствие правила дорожного движения "остановка" на шлагбауме железнодорожного переезда 7, и въезд другого транспортного средства V3 на перекресток, которому принадлежит запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1, временно ограничивается. В этом случае, процессор 11 оценки извлекает фактор запрета въезда транспортных средств вследствие правила дорожного движения "остановка" на шлагбауме железнодорожного переезда 7, проводит перекрестную проверку этого фактора с пересекающей линией 2 движения другого транспортного средства V3, определяет то, что въезд другого транспортного средства V3 на перекресток вдоль пересекающей линии 2 движения ограничивается, и исключает пересекающую линию 2 движения из возможных вариантов для необходимой линии движения.
[0058] Как проиллюстрировано на фиг. 1, устройство 20 планирования действий при вождении включает в себя процессор 21 планирования действий при вождении. Процессор 21 планирования действий при вождении планирует действие при вождении рассматриваемого транспортного средства V1, движущегося по запланированному намеченному пути 1 движения. Процессор 21 планирования действий при вождении получает информацию выбора необходимой линии движения из процессора 11 оценки. Процессор 21 планирования действий при вождении планирует действие при вождении, чтобы не допускать контакта рассматриваемого транспортного средства V1 с объектами, присутствующими рядом с рассматриваемым транспортным средством V1, в соответствии со взаимосвязью между необходимой линией движения, выбранной посредством процессора 11 оценки, и рассматриваемым транспортным средством V1 и существованием объектов, обнаруженных посредством устройства 230 обнаружения объектов.
[0059] Процессор 21 планирования действий при вождении представляет собой компьютер, содержащий постоянное запоминающее устройство (ROM), которое сохраняет программы для выполнения процесса планирования действий при вождении, включающих в себя движение/остановку рассматриваемого транспортного средства V1, центральный процессор (CPU) в качестве функциональной схемы, которая выполняет программы, сохраненные в ROM, так что он служит в качестве устройства 20 планирования действий при вождении, и оперативное запоминающее устройство (RAM), которое служит в качестве доступного устройства хранения данных.
[0060] Процессор 21 планирования действий при вождении определяет действие при вождении в ответ на другое транспортное средство V3, движущееся по необходимой линии движения, выбранной посредством процессора 11 оценки. Действия при вождении, которые должны определяться, включают в себя действие движения и действие остановки. Процессор 21 планирования действий при вождении определяет либо действие движения, либо действие остановки для каждой необходимой линии движения. Процессор 21 планирования действий при вождении всесторонне учитывает контент каждого действия, определенного для каждой необходимой линии движения, чтобы планировать последовательность действий при вождении для окружения, с которым встречается рассматриваемое транспортное средство. Через эту операцию, может быть запланировано действие при вождении, в котором становится очевидным, где рассматриваемое транспортное средство должно выполнять остановку от начала проезда через окружение до завершения проезда через окружение.
[0061] Фиг. 13 является схемой для описания схемы определения действия при вождении в ответ на пересекающую линию 2 движения другого транспортного средства V3, которая пересекается с запланированным намеченным путем 1 движения рассматриваемого транспортного средства V1 справа. Фиг. 14 является схемой для описания схемы определения действия при вождении в ответ на пересекающую линию 2 движения другого транспортного средства V3, которая пересекается с запланированным намеченным путем 1 движения рассматриваемого транспортного средства V1 после правого поворота из встречной полосы движения.
[0062] В окружении, проиллюстрированном на фиг. 13, процессор 21 планирования действий при вождении определяет действие при вождении, которое должно предприниматься для события, при котором рассматриваемое транспортное средство V1 проезжает через точку, в которой запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1 пересекается с пересекающей линией 2 движения другого транспортного средства V3. Процессор 21 планирования действий при вождении вычисляет позиционную взаимосвязь между рассматриваемым транспортным средством V1 и другим транспортным средством V3, ассоциированную с пересекающей линией 2 движения, и изменение позиционной взаимосвязи (степени приближения). На основе оставшегося времени для вхождения в контакт с другим транспортным средством V3 посредством рассматриваемого транспортного средства V1, процессор 21 планирования действий при вождении определяет то, может или нет рассматриваемое транспортное средство V1 проезжать через точку 8 пересечения между запланированным намеченным путем 1 движения и пересекающей линией 2 движения без вхождения в контакт с другим транспортным средством V3.
[0063] Процессор 21 планирования действий при вождении вычисляет оцененное время для прибытия каждого из рассматриваемого транспортного средства V1 и другого транспортного средства V3 в точку 8 пересечения и определяет то, может или нет рассматриваемое транспортное средство V1 проезжать через точку 8 пересечения с допустимым запасом. Допустим, например, что скорость рассматриваемого транспортного средства V1 составляет VV1, расстояние от рассматриваемого транспортного средства V1 до точки 8 пересечения составляет L1, скорость другого транспортного средства V3 составляет VV2, и расстояние от другого транспортного средства V3 до точки 8 пересечения составляет L2.
[0064] Когда следующее выражение (1) удовлетворяется, процессор 21 планирования действий при вождении определяет то, что рассматриваемое транспортное средство V1 с очень большой вероятностью должно входить в контакт с другим транспортным средством V3 в точке 8 пересечения, и определяет то, что в точке 8 пересечения действие при вождении представляет собой "остановка". При использовании в данном документе, Tthreshold представляет допустимый запас времени, который задается с учетом безопасности, когда транспортные средства пересекают друг друга.
|L2/VV2-L1/VV1|<Tthreshold (1)
[0065] С другой стороны, когда следующее выражение (2) удовлетворяется, процессор 21 планирования действий при вождении определяет то, что рассматриваемое транспортное средство V1 с очень небольшой вероятностью должно входить в контакт с другим транспортным средством V3 в точке 8 пересечения, и определяет то, что в точке 8 пересечения действие при вождении представляет собой "движение".
|L2/VV2-L1/VV1|≥Tthreshold (2)
[0066] В окружении, проиллюстрированном на фиг. 14, процессор 21 планирования действий при вождении определяет действие при вождении, которое должно предприниматься для события, при котором рассматриваемое транспортное средство V1 проезжает через точку, в которой запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1 пересекается с пересекающей линией 2 движения другого транспортного средства V3. Процессор 21 планирования действий при вождении вычисляет позиционную взаимосвязь между рассматриваемым транспортным средством V1 и другим транспортным средством V3, ассоциированную с пересекающей линией 2 движения, и изменение позиционной взаимосвязи (степени приближения). На основе оставшегося времени для вхождения в контакт с другим транспортным средством V3 посредством рассматриваемого транспортного средства V1, процессор 21 планирования действий при вождении определяет то, может или нет рассматриваемое транспортное средство V1 проезжать через точку 9 пересечения между запланированным намеченным путем 1 движения и пересекающей линией 2 движения без вхождения в контакт с другим транспортным средством V3.
[0067] Процессор 21 планирования действий при вождении вычисляет оцененное время для прибытия каждого из рассматриваемого транспортного средства V1 и другого транспортного средства V3 в точку 9 пересечения и определяет то, может или нет рассматриваемое транспортное средство V1 проезжать через точку 9 пересечения с допустимым запасом. Допустим, например, что скорость рассматриваемого транспортного средства V1 составляет VV1, расстояние от рассматриваемого транспортного средства V1 до точки 9 пересечения составляет L1, скорость другого транспортного средства V3 составляет VV3, и расстояние от другого транспортного средства V3 до точки 9 пересечения составляет L3. Расстояние L3 может вычисляться со ссылкой на кривизну и т.п., сохраненную в качестве части информации 223 дороги, и также может вычисляться со ссылкой на расстояние между узлами, которое сохраняется в качестве части информации 223 дороги.
[0068] Когда следующее выражение (3) удовлетворяется, процессор 21 планирования действий при вождении определяет то, что рассматриваемое транспортное средство V1 с очень большой вероятностью должно встречается с событием входа в контакт с другим транспортным средством V3 в точке 9 пересечения, и определяет то, что действие при вождении в этом случае в этом случае представляет собой "остановка".
|L3/VV3-L1/VV1|<Tthreshold (3)
[0069] С другой стороны, когда следующее выражение (4) удовлетворяется, процессор 21 планирования действий при вождении определяет то, что рассматриваемое транспортное средство V1 с очень небольшой вероятностью должно встречается с событием входа в контакт с другим транспортным средством V3 в точке 9 пересечения, и определяет то, что действие при вождении в этом случае представляет собой "движение".
|L3/VV3-L1/VV1|≥Tthreshold (4)
[0070] Процессор 21 планирования действий при вождении планирует последовательность действий при вождении рассматриваемого транспортного средства V1 с использованием взаимосвязей с множеством пересекающих линий 2 движения, которые встречаются с запланированным намеченным путем 1 движения рассматриваемого транспортного средства V1 на основе временных рядов. Действия при вождении обращаются к инструкциям, в которых команды остановки или движения ассоциированы с соответствующими пересекающими линиями 2 движения, которые мешают запланированному намеченному пути 1 движения, например, от момента въезда в определенную область, такую как перекресток, до момента выезда из определенной области.
[0071] Когда определение действия движения выполняется для пересекающей линии 2 движения, и определение действия остановки или неопределимости выполняется для другой пересекающей линии 2 движения, которая встречается следующей относительно этой пересекающей линией 2 движения, процессор 21 планирования действий при вождении планирует действие при вождении для управления рассматриваемым транспортным средством V1 таким образом, чтобы выполнять остановку в точке пересечения между запланированным намеченным путем 1 движения и пересекающей линией 2 движения, для которой определяется действие движения. Даже в случае, если однократно определено действие движения, когда пересекающая линия 2 движения, с которой следом встречается рассматриваемое транспортное средство V1, требует действия остановки или является неопределимой, рассматриваемое транспортное средство V1 может управляться таким образом, чтобы выполнять остановку в позиции, для которой определено действие движения. Местоположение, для которого определяется действие движения, представляет собой местоположение, в котором рассматриваемому транспортному средству V1 разрешается оставаться, и рассматриваемое транспортное средство V1 в силу этого может управляться таким образом, чтобы выполнять безопасную остановку.
[0072] Когда точка пересечения между запланированным намеченным путем 1 движения и пересекающей линией 2 движения, для которой выполнено определение действия остановки или неопределимости, принадлежит другой пересекающей линии 2 движения, процессор 21 планирования действий при вождении планирует действие при вождении для управления рассматриваемым транспортным средством V1 таким образом, чтобы выполнять остановку в позиции, которая расположена на более ранней стороне, чем точка пересечения, и в которой остановка является возможной. Здесь, даже в случае, если определение действия остановки или неопределимости выполняется для пересекающей линии 2 движения, когда позиция остановки, соответствующая пересекающей линии 2 движения, принадлежит другой пересекающей линии 2 движения, рассматриваемое транспортное средство V1 может перегораживать другое транспортное средство V3, движущееся по другой пересекающей линии 2 движения. Таким образом, позиция остановки является несоответствующей. Действие при вождении в силу этого планируется таким образом, что позиция остановки задается в качестве расположенной ранее позиции, в которой остановка является возможной, а не в пределах другой пересекающей линии 2 движения.
[0073] Когда определение действия остановки или неопределимости выполняется для пересекающей линии 2 движения, и точка пересечения между пересекающей линией 2 движения и запланированным намеченным путем 1 движения находится близко или перекрывает точку пересечения между другой пересекающей линией 2 движения и запланированным намеченным путем 1 движения таким образом, что эти точки пересечения расположены в пределах предварительно определенного расстояния, процессор 21 планирования действий при вождении планирует действие при вождении для управления рассматриваемым транспортным средством V1 таким образом, чтобы выполнять остановку в позиции, которая расположена на более ранней стороне, чем эти точки пересечения, и в которой остановка является возможной. Даже в случае, если определение действия остановки или неопределимости выполняется для пересекающей линии 2 движения, когда позиция остановки для пересекающей линии 2 движения находится близко или перекрывает позицию остановки для другой пересекающей линии 2 движения, сопоставление с определением для другой пересекающей линии 2 движения с большой вероятностью должно учитываться. Позиция остановки в силу этого является несоответствующей. Действие при вождении в силу этого планируется таким образом, что позиция остановки задается в качестве расположенной ранее позиции, в которой остановка является возможной, а не в пределах другой пересекающей линии 2 движения. Это позволяет уменьшать случаи неопределимости. Кроме того, нагрузка процессов определения может уменьшаться, и рассматриваемое транспортное средство V1 может двигаться плавно без повторения вождения в режиме частых остановок и троганий с места.
[0074] Когда определение действия движения выполняется для одной пересекающей линии 2 движения, и определение действия остановки или неопределимости выполняется для другой пересекающей линии 2 движения, которая встречается следующей относительно одной пересекающей линией 2 движения, процессор 21 планирования действий при вождении планирует действие при вождении для управления рассматриваемым транспортным средством V1 таким образом, чтобы двигаться по одной пересекающей линии 2 движения, при условии что степень разделения между одной пересекающей линией 2 движения и другой пересекающей линией 2 движения составляет предварительно определенное значение или больше. Когда движение разрешается для одной пересекающей линии 2 движения, но определение действия остановки или неопределимости выполняется для другой пересекающей линии 2 движения, которая после этого встречается, если рассматриваемое транспортное средство V1 управляется таким образом, чтобы выполнять остановку в одной более ранней пересекающей линии 2 движения, определение должно выполняться снова в отношении того, разрешается или нет движение по другой пересекающей линии 2 движения, и рассматриваемое транспортное средство V1 может мешать потоку движения другого транспортного средства V3 на другой пересекающей линии 2 движения. Таким образом, когда отдельные события определяются различными способами: "движение" на более ранней стороне и "остановка" на более поздней стороне, планируется действие при вождении для управления рассматриваемым транспортным средством V1 таким образом, чтобы двигаться по более ранней пересекающей линии 2 движения, чтобы за счет этого предотвращать усложнение процесса.
[0075] Здесь, когда дорога, которой принадлежит пересекающая линия 2 движения, включена в диапазон обнаружения устройства 230 обнаружения объектов, процессор 21 планирования действий при вождении определяет действие при вождении и выводит его в контроллер 210 транспортного средства. Контроллер 210 транспортного средства выводит управляющие сигналы в приводное устройство 270 и устройство 280 рулевого управления, когда действие при вождении выводится из процессора 21 планирования действий при вождении. Это обеспечивает возможность управления приводного устройства 270 и/или устройства 280 рулевого управления полностью автоматизированным способом или в форме помощи в операции вождения (операции движения) водителя.
[0076] С другой стороны, когда дорога, которой принадлежит пересекающая линия 2 движения, не включена в диапазон обнаружения устройства 230 обнаружения объектов, процессор 21 планирования действий при вождении не может определять действие при вождении вследствие неопределимого состояния и в силу этого не выводит действие при вождении в контроллер 210 транспортного средства. В этом случае, контроллер 210 транспортного средства не выводит управляющие сигналы в приводное устройство 270 и устройство 280 рулевого управления, и управление приводным устройством 270 и устройством 280 рулевого управления, выполняемое полностью автоматизированным способом или в форме помощи в операции вождения водителя, приостанавливается/отменяется.
[0077] Процессор 21 планирования действий при вождении определяет действие при вождении в ответ на необходимую линию движения, выбранную посредством процессора 11 оценки, и выводит действие при вождении в контроллер 210 транспортного средства, но не определяет действие при вождении для пересекающей линии 2 движения, которая исключается из возможных вариантов для необходимой линии движения посредством процессора 11 оценки. Здесь, диапазон обнаружения для объектов, назначаемых устройству 230 обнаружения объектов, включает в себя не только диапазон, которому принадлежит необходимая линия движения, но также и диапазон, которому не принадлежит необходимая линия движения. При обнаружении объекта, устройство 230 обнаружения объектов выводит сигнал обнаружения в контроллер 210 транспортного средства даже в то время, когда управление приводным устройством 270 и устройством 280 рулевого управления выполняется полностью автоматизированным способом или в форме помощи в операции вождения водителя. Когда устройство 230 обнаружения объектов обнаруживает объект в диапазоне, которому не принадлежит необходимая линия движения, в то время как управление приводным устройством 270 и устройством 280 рулевого управления выполняется полностью автоматизированным способом и т.п., контроллер 210 транспортного средства может приостанавливать/отменять управление приводным устройством 270 и устройством 280 рулевого управления, которое выполняется полностью автоматизированным способом и т.п., в соответствии с позиционной взаимосвязью между обнаруженным объектом и рассматриваемым транспортным средством V1, и/или может выводить управляющие сигналы для недопущения контакта между рассматриваемым транспортным средством V1 и объектом в приводное устройство 270 и устройство 280 рулевого управления.
[0078] Устройство 30 вывода включает в себя процессор 31 управления выводом. Процессор 31 управления выводом отображает информацию с использованием дисплея 251 в качестве устройства 30 вывода. Процессор 31 управления выводом отображает информационные элементы, представляющие пересекающие линии 2 движения, выбранные посредством процессора оценки, в порядке встречи с рассматриваемым транспортным средством V1 и параллельно.
[0079] Процессор 31 управления выводом представляет собой компьютер, содержащий постоянное запоминающее устройство (ROM), которое сохраняет программы для выполнения процесса отображения информационных элементов, представляющих пересекающие линии движения, центральный процессор (CPU) в качестве функциональной схемы, которая выполняет программы, сохраненные в ROM, так что он служит в качестве устройства 30 вывода, и оперативное запоминающее устройство (RAM), которое служит в качестве доступного устройства хранения данных.
[0080] Фиг. 15 является блок-схемой последовательности операций способа для описания процесса выбора необходимой линии движения в соответствии с состоянием светофоров с использованием процессора 11 оценки устройства 10 оценки окружения (см. фиг. 2-6). Как проиллюстрировано на блок-схеме последовательности операций способа, во-первых, на этапе S101, процессор 11 оценки получает текущую позицию рассматриваемого транспортного средства V1 из навигационного устройства 220. Затем на этапе S102, процессор 11 оценки определяет то, изменяется или нет вычисленный запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1. При отрицательном определении на этом этапе выполняется этап S104, тогда как при положительном определении выполняется этап S103. На этапе S103, процессор 11 оценки вычисляет запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1 на основе текущей позиции рассматриваемого транспортного средства V1, целевого намеченного пути и картографической информации 222.
[0081] Затем на этапе S104, процессор 11 оценки извлекает пересекающую линию 2 движения другого транспортного средства V3 на основе вычисленного запланированного намеченного пути 1 движения рассматриваемого транспортного средства V1, картографической информации 222 и информации 223 дороги. Затем на этапе S105, процессор 11 оценки получает информацию относительно светофоров рядом с рассматриваемым транспортным средством V1 из устройства 230 обнаружения объектов и т.п.
[0082] Затем на этапе S106, процессор 11 оценки определяет то, присутствует или нет светофор, соответствующий запланированному намеченному пути 1 движения рассматриваемого транспортного средства V1. При положительном определении на этом этапе выполняется этап S107. Когда отрицательное определение выполняется, процесс завершается.
[0083] На этапе S107, процессор 11 оценки обращается к информации 223 дороги, чтобы ассоциировать пересекающую линию 2 движения другого транспортного средства V3 со светофором. Затем на этапе S108, процессор 11 оценки определяет то, изменяется или нет состояние светофора между предыдущим процессом и текущим процессом. При положительном определении на этом этапе выполняется этап S111, тогда как при отрицательном определении выполняется этап S109.
[0084] На этапе S109, процессор 11 оценки определяет то, находится или нет светофор, соответствующий пересекающей линии 2 движения другого транспортного средства V3, в состоянии запрещения проезда. При положительном определении на этом этапе выполняется этап S110. Когда отрицательное определение выполняется, процесс завершается. Через эту операцию, пересекающая линия 2 движения, соответствующая светофору в состоянии разрешения проезда, выбирается в качестве необходимой линии движения. С другой стороны, на этапе S110, процессор 11 оценки исключает пересекающую линию 2 движения, соответствующую светофору в состоянии запрещения проезда, из возможных вариантов для необходимой линии движения.
[0085] На этапе S111, процессор 11 оценки вычисляет время задержки от изменения состояния светофора до переключения необходимой линии движения. Затем на этапе S112, процессор 11 оценки определяет то, истекло или нет вышеуказанное время задержки после того, как состояние светофора изменено. При положительном определении на этом этапе выполняется этап S113.
[0086] На этапе S113, процессор 11 оценки определяет то, изменен или нет светофор из состояния разрешения проезда на состояние запрещения проезда. При положительном определении на этом этапе выполняется этап S114, тогда как при отрицательном определении выполняется этап S115.
[0087] На этапе S114, процессор 11 оценки постепенно уменьшает длину необходимой линии движения в соответствии со скоростью транспортного средства для другого транспортного средства V3, въезжающего на перекресток вдоль пересекающей линии 2 движения, которая выбирается в качестве необходимой линии движения, в то время как вышеуказанное время задержки истекает после того, как светофор изменяется из состояния разрешения проезда на состояние запрещения проезда. С другой стороны, на этапе S115, процессор 11 оценки выбирает пересекающую линию 2 движения, соответствующую светофору, который изменен из состояния запрещения проезда на состояние разрешения проезда, сразу после изменения (без ожидания истечения вышеуказанного времени задержки). Процесс в силу этого завершается.
[0088] Фиг. 16 является блок-схемой последовательности операций способа для описания процесса выбора необходимой линии движения в соответствии с запланированным намеченным путем 4 движения параллельно движущегося транспортного средства V2 и уровнем приоритета по правилам дорожного движения с использованием процессора 11 оценки (см. фиг. 7-9). Этапы S201-S204, проиллюстрированные на этой блок-схеме последовательности операций способа, являются идентичными этапам S101-S104, проиллюстрированным на блок-схеме последовательности операций способа по фиг. 15, так что повторяющееся описание опускается, и уже приведенное описание заимствуется в данном документе.
[0089] После этапа S204 выполняется этап S205, на котором процессор 11 оценки получает информацию относительно позиций, скоростей и векторов перемещения других транспортных средств рядом с рассматриваемым транспортным средством V1 из устройства 230 обнаружения объектов и т.п. Затем на этапе S206, процессор 11 оценки определяет то, существует или нет параллельно движущееся транспортное средство V2, движущееся параллельно рассматриваемому транспортному средству V1, на основе информации, полученной из устройства 230 обнаружения объектов и т.п. При положительном определении на этом этапе выполняется этап S207. Когда отрицательное определение выполняется, процесс завершается.
[0090] На этапе S207, процессор 11 оценки вычисляет запланированный намеченный путь 4 движения параллельно движущегося транспортного средства V2. Затем на этапе S208, процессор 11 оценки определяет то, существует или нет пересекающая линия 2 движения другого транспортного средства V3, пересекающаяся с запланированным намеченным путем 4 движения параллельно движущегося транспортного средства V2. При положительном определении на этом этапе выполняется этап S209. Когда отрицательное определение выполняется, процесс завершается.
[0091] На этапе S209, процессор 11 оценки вычисляет уровни приоритета, по правилам дорожного движения параллельно движущегося транспортного средства V2, другого транспортного средства V3, которое движется вдоль пересекающей линии 2 движения. Затем на этапе S210, процессор 11 оценки определяет то, выше или нет уровень приоритета параллельно движущегося транспортного средства V2 уровня приоритета другого транспортного средства V3, движущегося по пересекающей линии 2 движения. При положительном определении на этом этапе выполняется этап S211. Когда отрицательное определение выполняется, процесс завершается. Через эту операцию, пересекающая линия 2 движения, по которой движется другое транспортное средство V3, имеющее более высокий уровень приоритета, чем уровень приоритета параллельно движущегося транспортного средства V2, выбирается в качестве необходимой линии движения. С другой стороны, на этапе S211, процессор 11 оценки исключает пересекающую линию 2 движения, по которой движется другое транспортное средство V3, имеющее более низкий уровень приоритета, чем уровень приоритета параллельно движущегося транспортного средства V2, из возможных вариантов для необходимой линии движения. Процесс в силу этого завершается.
[0092] Фиг. 17 является блок-схемой последовательности операций способа для описания процесса выбора необходимой линии движения в соответствии с правилами дорожного движения на дороге с использованием процессора 11 оценки (см. фиг. 10-12). Этапы S301-S304, проиллюстрированные на этой блок-схеме последовательности операций способа, являются идентичными этапам S101-S104, проиллюстрированным на блок-схеме последовательности операций способа по фиг. 15, так что повторяющееся описание опускается, и уже приведенное описание заимствуется в данном документе.
[0093] После этапа S304 выполняется этап S305, на котором процессор 11 оценки обращается к информации 223 дороги и информации 224 правил дорожного движения для того, чтобы извлекать правила дорожного движения, ассоциированные с полосой движения, которой принадлежит запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1, и полосой движения, которой принадлежит пересекающая линия 2 движения другого транспортного средства 3, и извлекает факторы, которые ограничивают движение транспортных средств, из числа извлеченных правил дорожного движения.
[0094] Затем на этапе S306, процессор 11 оценки определяет то, имеет или нет дорога, которой принадлежит пересекающая линия 2 движения другого транспортного средства V3, ограничение "проезд запрещен" для транспортных средств вследствие правила дорожного движения "одностороннее движение". При положительном определении на этом этапе выполняется этап S307, тогда как при отрицательном определении выполняется этап S308. На этапе S307, процессор 11 оценки исключает пересекающую линию 2 движения в противоположном направлении относительно направления движения в соответствии с правилом дорожного движения "одностороннее движение" из возможных вариантов для необходимой линии движения.
[0095] Затем на этапе S308, процессор 11 оценки определяет то, имеет или нет дорога, которой принадлежит пересекающая линия 2 движения другого транспортного средства V3, ограничение "проезд запрещен" для транспортных средств вследствие правила дорожного движения "следуйте в этом направлении". При положительном определении на этом этапе выполняется этап S309, тогда как при отрицательном определении выполняется этап S310. На этапе S309, процессор 11 оценки исключает пересекающую линию 2 движения другого транспортного средства V3 из возможных вариантов для необходимой линии движения, поскольку въезд другого транспортного средства V3 на дорогу, которой принадлежит запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1, запрещается вследствие правила дорожного движения "следуйте в этом направлении".
[0096] Затем на этапе S310, процессор 11 оценки определяет то, имеет или нет дорога, которой принадлежит пересекающая линия 2 движения другого транспортного средства V3, ограничение временного запрета въезда транспортных средств вследствие правила дорожного движения "остановка" на шлагбауме железнодорожного переезда 7. При положительном определении на этом этапе выполняется этап S311. Когда отрицательное определение выполняется, процесс завершается. На этапе S311, процессор 11 оценки исключает пересекающую линию 2 движения другого транспортного средства V3 из возможных вариантов для необходимой линии движения, поскольку въезд другого транспортного средства V3 на дорогу, которой принадлежит запланированный намеченный путь 1 движения рассматриваемого транспортного средства V1, запрещается вследствие правила дорожного движения "остановка" на шлагбауме железнодорожного переезда 7.
[0097] Как описано выше, в способе и оборудовании помощи при вождении согласно одному или более вариантов осуществления настоящего изобретения, пересекающие линии 2 движения других транспортных средств V3, пересекающих запланированному намеченному пути 1 движения рассматриваемого транспортного средства V1, извлекаются, пересекающая линия 2 движения (необходимая линия движения), необходимая для определения действия при вождении рассматриваемого транспортного средства V1, выбирается из числа извлеченных пересекающих линий 2 движения на основе, по меньшей мере, одного из формы дороги, правила дорожного движения и дорожной ситуации, и определяется действие при вождении рассматриваемого транспортного средства V1 в ответ на другое транспортное средство V3, перемещающееся вдоль выбранной пересекающей линии 2 движения. Через эту операцию, диапазон для поиска при определении действия при вождении рассматриваемого транспортного средства V1 может задаваться в качестве соответствующего диапазона в соответствии с необходимостью определения действия при вождении рассматриваемого транспортного средства V1. В силу этого можно подавлять возникновение диапазона, в котором восприятие посредством устройства 230 обнаружения объектов является невозможным в диапазоне для поиска при определении действия при вождении, а также подавлять возникновение ситуации, в которой определение действия при вождении является затруднительным. Кроме того, нагрузка процесса определения для действия при вождении может уменьшаться посредством ограничения диапазона для поиска при определении действия при вождении рассматриваемого транспортного средства V1, и в силу этого можно уменьшать время для процесса и предотвращать возникновение задержки процесса.
[0098] В способе и оборудовании помощи при вождении согласно одному или более вариантов осуществления настоящего изобретения, необходимая линия движения выбирается из числа извлеченных пересекающих линий 2 движения на основе состояния светофоров 3A-3D, соответствующих извлеченным пересекающим линиям 2 движения других транспортных средств V3 (см. фиг. 3, фиг. 4 и фиг. 15). Например, пересекающая линия 2 движения, соответствующая светофору в состоянии разрешения проезда, выбирается в качестве необходимой линии движения из числа извлеченных пересекающих линий 2 движения. Это позволяет исключать пересекающие линии 2 движения, через которые оценивается то, что другие транспортные средства V3 не проезжают относительно состояния светофоров 3A-3C, из возможных вариантов для необходимой линии движения.
[0099] В способе и оборудовании помощи при вождении согласно одному или более вариантов осуществления настоящего изобретения, когда состояние светофоров, соответствующих извлеченным пересекающим линиям 2 движения других транспортных средств V3, изменяется, пересекающая линия движения, которая должна выбираться, переключается в соответствии с изменением состояния светофоров. Например, когда состояние светофора, соответствующего выбранной пересекающей линии 2 движения, изменяется из состояния разрешения проезда на состояние запрещения проезда, выбранная пересекающая линия 2 движения переключается на невыбранную пересекающую линию движения посредством постепенного уменьшения длины. Это обеспечивает возможность планирования действия при вождении в ответ на ситуацию сразу после того, как состояние светофора изменяется, к примеру, на ситуацию, в которой другое транспортное средство V3 движется по пересекающей линии 2 движения к запланированному намеченному пути 1 движения рассматриваемого транспортного средства V1 сразу после того, как светофор изменяется из состояния разрешения проезда на состояние запрещения проезда.
[0100] В способе и оборудовании помощи при вождении согласно одному или более вариантов осуществления настоящего изобретения, когда состояние светофора, соответствующего выбранной пересекающей линии 2 движения другого транспортного средства V3, изменяется из состояния разрешения проезда на состояние запрещения проезда, длина выбранной пересекающей линии 2 движения постепенно уменьшается в величине уменьшения в единицу времени в соответствии со скоростью транспортного средства для другого транспортного средства V3, перемещающегося вдоль выбранной пересекающей линии 2 движения. Здесь, по мере того, как скорость транспортного средства для другого транспортного средства увеличивается V3, величина уменьшения в расчете на единицу длины пересекающей линии 2 движения в качестве необходимой линии движения уменьшается, чтобы за счет этого предоставлять возможность определения действия при вождении в ответ на другое транспортное средство V3, движущееся по пересекающей линии 2 движения на высокой скорости.
[0101] Здесь, до тех пор, пока определенный период времени (например, несколько секунд) не истекает от момента сразу после того, как светофор, соответствующий пересекающей линии 2 движения, выбранной в качестве необходимой линии движения, изменяется из состояния разрешения проезда на состояние запрещения проезда, остается вероятность того, что другое транспортное средство V3 движется по пересекающей линии 2 движения. С другой стороны, вероятность того, что другое транспортное средство V3 движется по пересекающей линии 2 движения, увеличивается за относительно короткий период времени сразу после того, как состояние светофора, соответствующего пересекающей линии 2 движения, изменяется из состояния запрещения проезда на состояние разрешения проезда (см. фиг. 5). Следовательно, в способе и оборудовании помощи при вождении согласно одному или более вариантов осуществления настоящего изобретения, когда состояние светофора, соответствующего выбранной пересекающей линии 2 движения другого транспортного средства V3, изменяется из состояния разрешения проезда на состояние запрещения проезда, выбранная пересекающая линия 2 движения переключается на невыбранную пересекающую линию движения после того, как предварительно определенное время задержки истекает от момента времени изменения. С другой стороны, когда состояние светофора, соответствующего невыбранной пересекающей линии 2 движения, изменяется из состояния запрещения проезда на состояние разрешения проезда, невыбранная пересекающая линия 2 движения переключается на выбранную пересекающую линию движения сразу после изменения без предоставления времени задержки. Это обеспечивает возможность определения действия при вождении в ответ на другое транспортное средство V3, движущееся по пересекающей линии 2 движения после того, как состояние светофора изменяется.
[0102] В способе и оборудовании помощи при вождении согласно одному или более вариантов осуществления настоящего изобретения, когда параллельно движущееся транспортное средство V2, движущееся параллельно рассматриваемому транспортному средству V1, существует, пересекающая линия 2 движения, пересекающая запланированному намеченному пути 4 движения параллельно движущегося транспортного средства V2, существует, и параллельно движущееся транспортное средство V2 имеет более высокий уровень приоритета по правилам дорожного движения, чем уровень приоритета другого транспортного средства V3, перемещающегося вдоль пересекающей линии 2 движения, пересекающая линия 2 движения не выбирается (см. фиг. 9). Это позволяет исключать пересекающие линии 2 движения, через которые оценивается то, что другое транспортное средство V3 не проезжает относительно взаимосвязи с уровнем приоритета параллельно движущегося транспортного средства V2 по правилам дорожного движения из возможных вариантов для необходимой линии движения.
[0103] В способе и оборудовании помощи при вождении согласно одному или более вариантов осуществления настоящего изобретения, пересекающая линия 2 движения, по которой перемещение другого транспортного средства V3 ограничивается по правилу дорожного движения, такому как ограничение движения вследствие "одностороннее движение", "следуйте в этом направлении" или железнодорожного переезда, не выбирается (см. фиг. 10-12). Это позволяет исключать пересекающие линии 2 движения, через которые оценивается то, что другое транспортное средство V3 не проезжает относительно правила дорожного движения из возможных вариантов для необходимой линии движения.
[0104] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0105] Например, в вышеописанных вариантах осуществления, форма дороги примерно проиллюстрирована со ссылкой на дорогу, имеющую перекресток, развилку и/или железнодорожный переезд, но необходимая линия движения также может выбираться на основе информации относительно других форм дорог, такой как число полос движения и скрещение дорог трех или более улиц. В вышеописанных вариантах осуществления, правила дорожного движения примерно проиллюстрированы со ссылкой на ограничение движения вследствие светофоров, такое правило дорожного движения, что транспортные средства, движущиеся по прямой вперед или поворачивающие налево на перекрестке, имеют более высокие уровни приоритета, чем уровни приоритета поворота направо встречных транспортных средств, ограничение движения вследствие "одностороннее движение", ограничение движения вследствие "следуйте в этом направлении" и ограничение движения вследствие железнодорожного переезда, но необходимая линия движения также может выбираться на основе информации относительно других правил дорожного движения, таких как ограничения движения вследствие "остановка" и приоритетная дорога. Кроме того, дорожная ситуация примерно проиллюстрирована со ссылкой на ситуацию, в которой параллельно движущееся транспортное средство существует, но необходимая линия движения также может выбираться на основе информации относительно других дорожных ситуаций, таких как ситуация, в которой определенное число встречных транспортных средств существует (т.е. ситуация, в которой когда рассматриваемое транспортное средство поворачивает налево, пересекающие линии движения транспортных средств, движущихся по прямой вперед с правой стороны, могут исключаться из возможных вариантов для необходимой линии движения).
[0106] Схема определения действия при вождении не ограничена вышеописанной схемой, и также могут выбираться другие соответствующие схемы.
Описание ссылочных обозначений
[0107] 1 - запланированный намеченный путь движения
2 - пересекающая линия движения
3A-3D - светофоры
4 - запланированный намеченный путь движения
7 - железнодорожный переезд
100 - оборудование помощи при вождении
21 - процессор планирования действий при вождении
V1 - рассматриваемое транспортное средство
V2 - параллельно движущееся транспортное средство
V3 - другое транспортное средство.
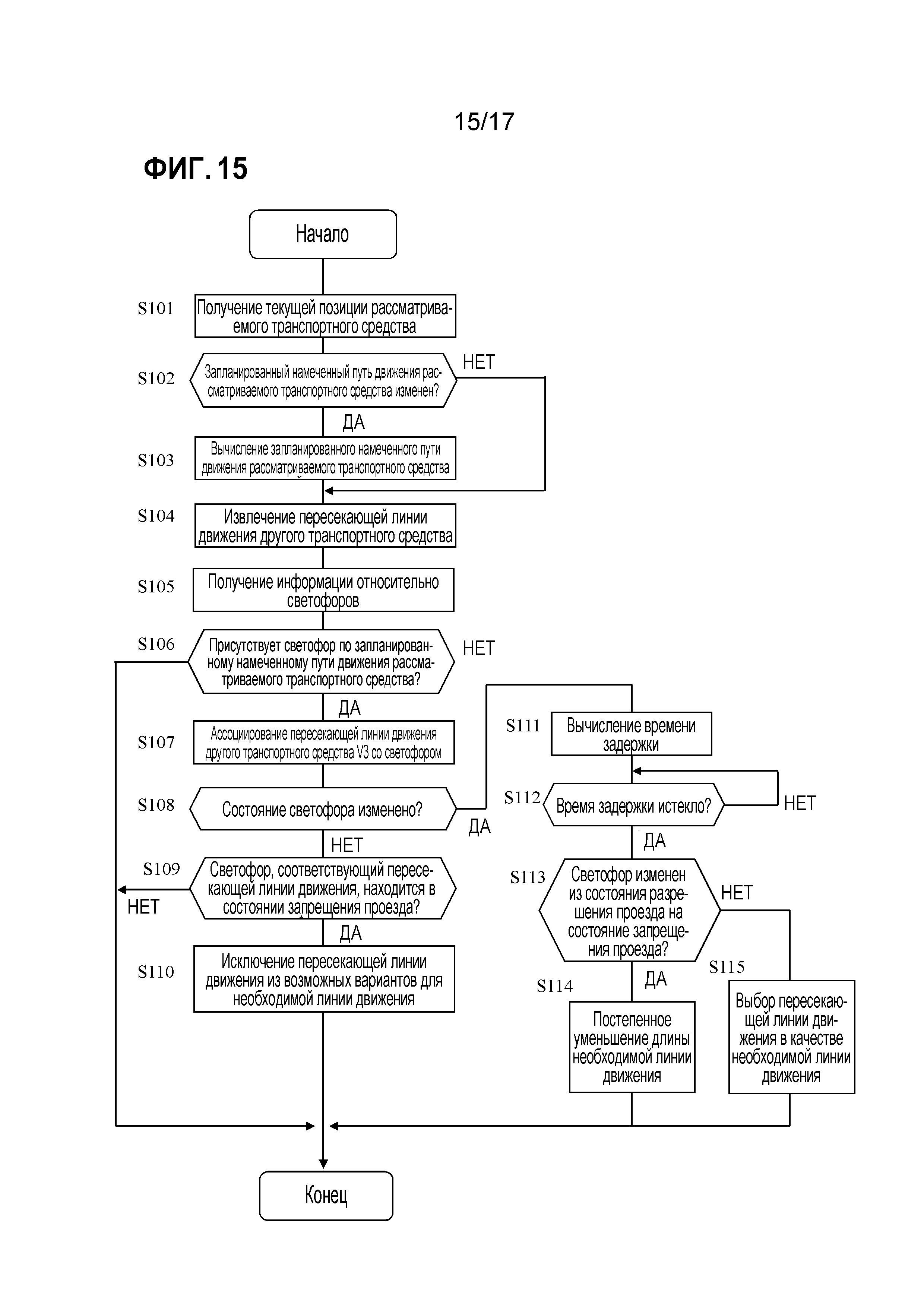
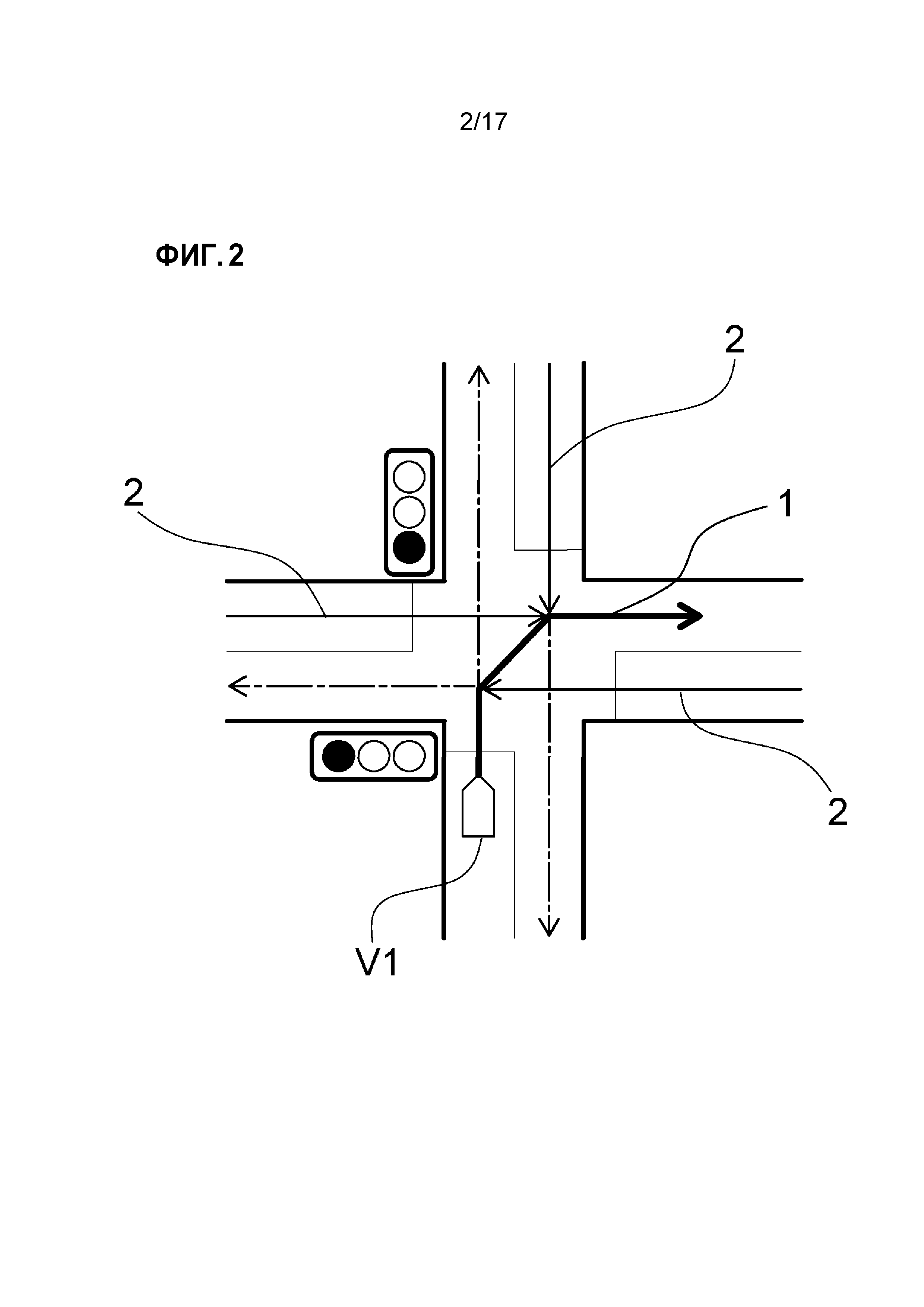
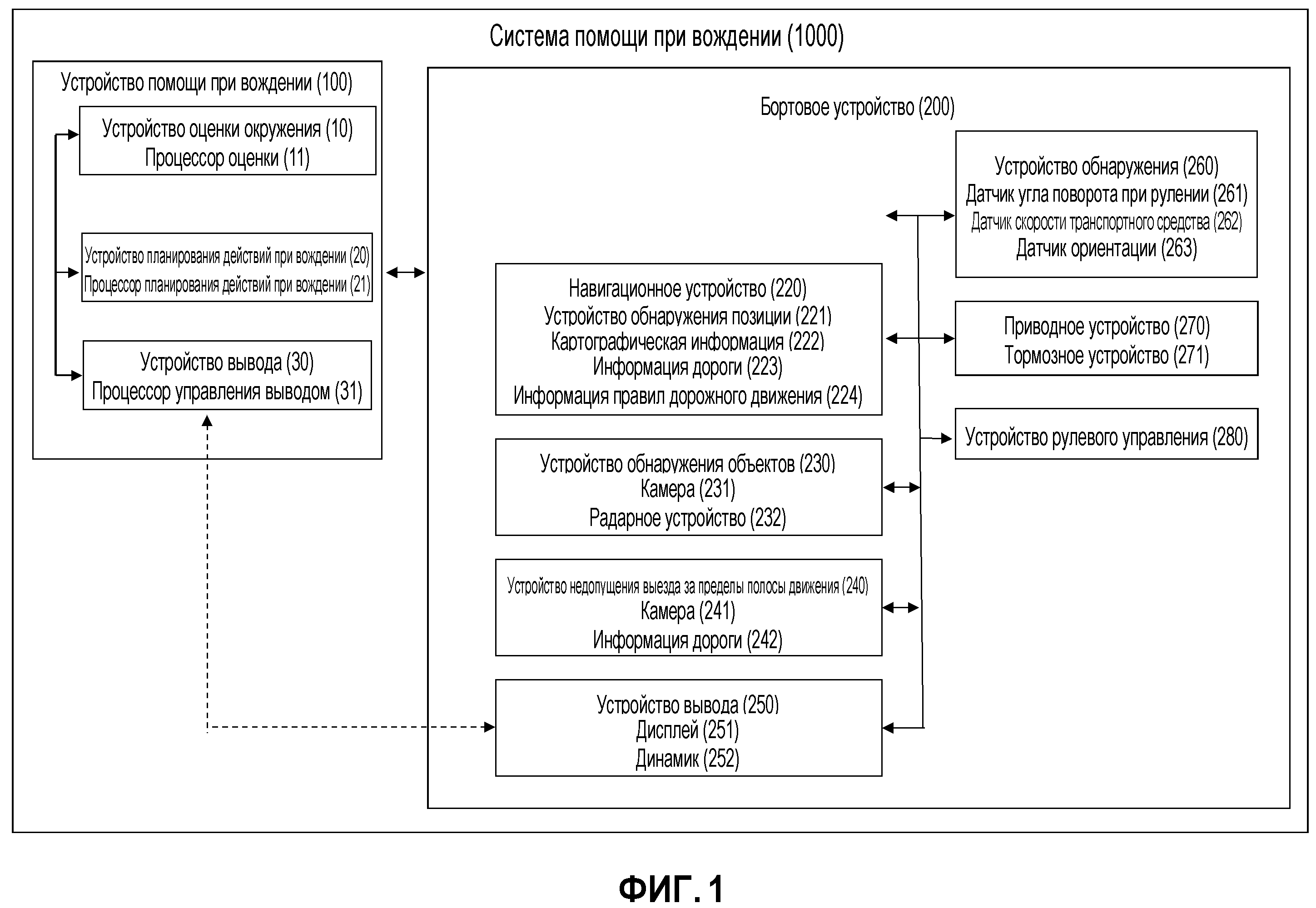
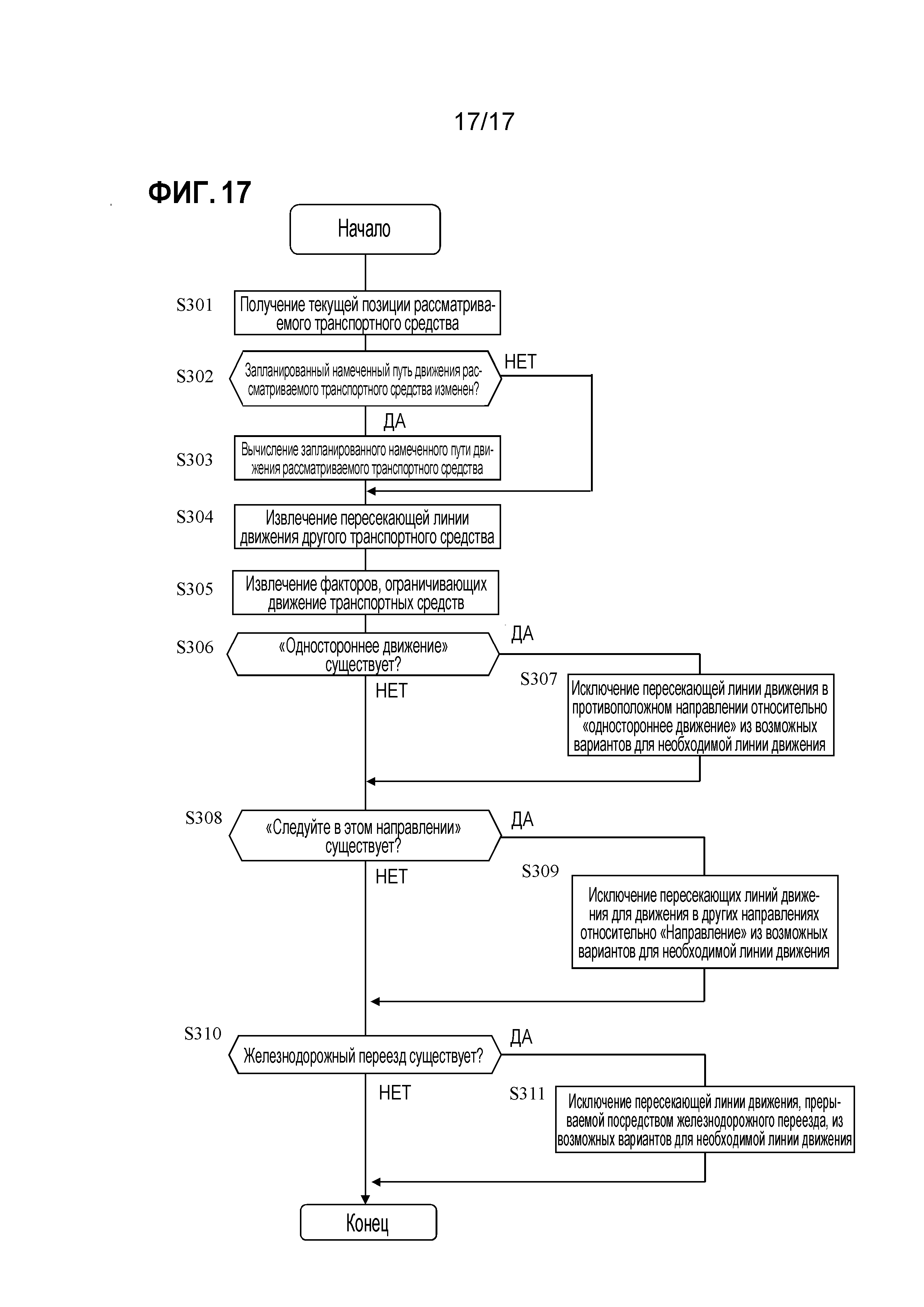
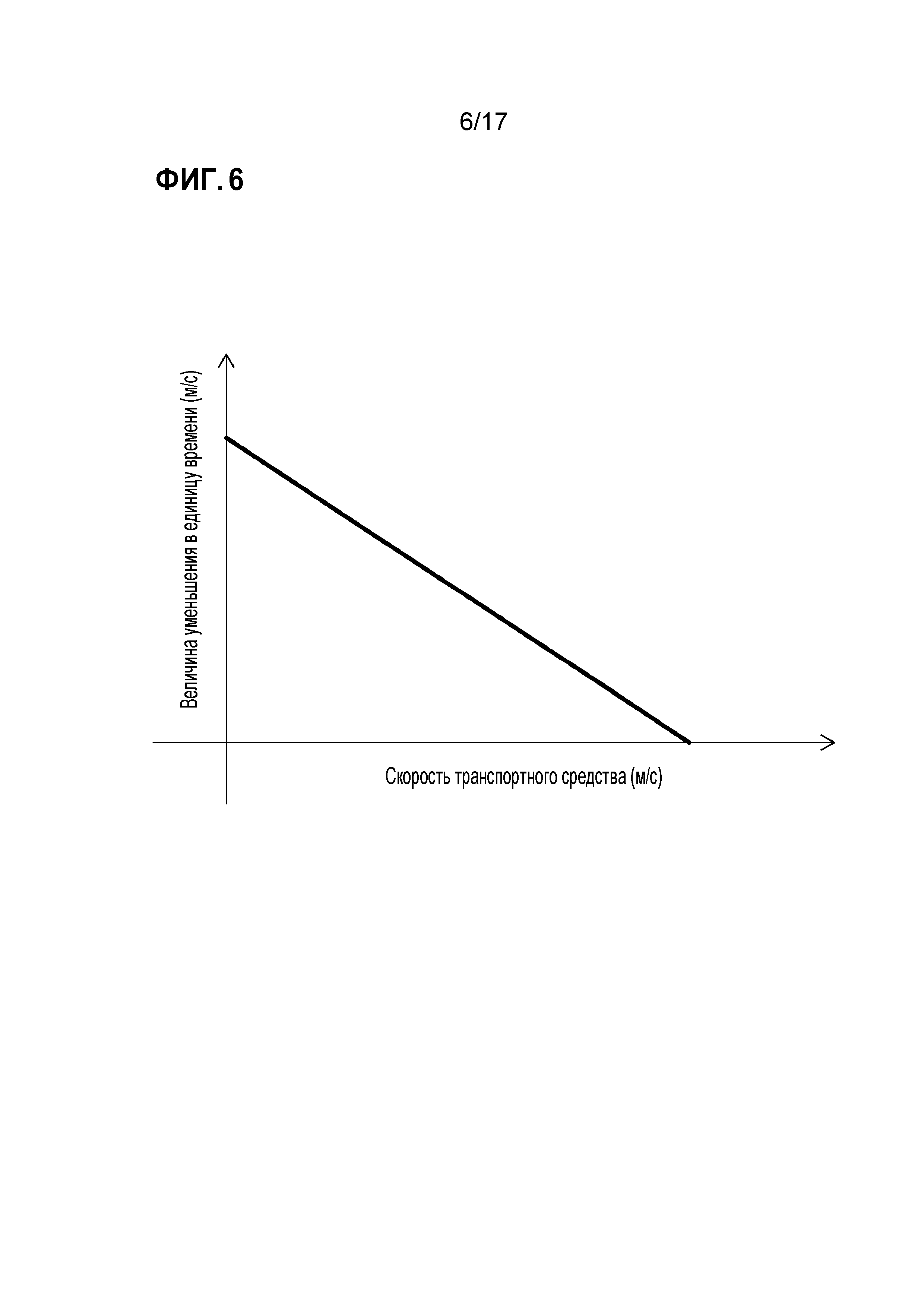
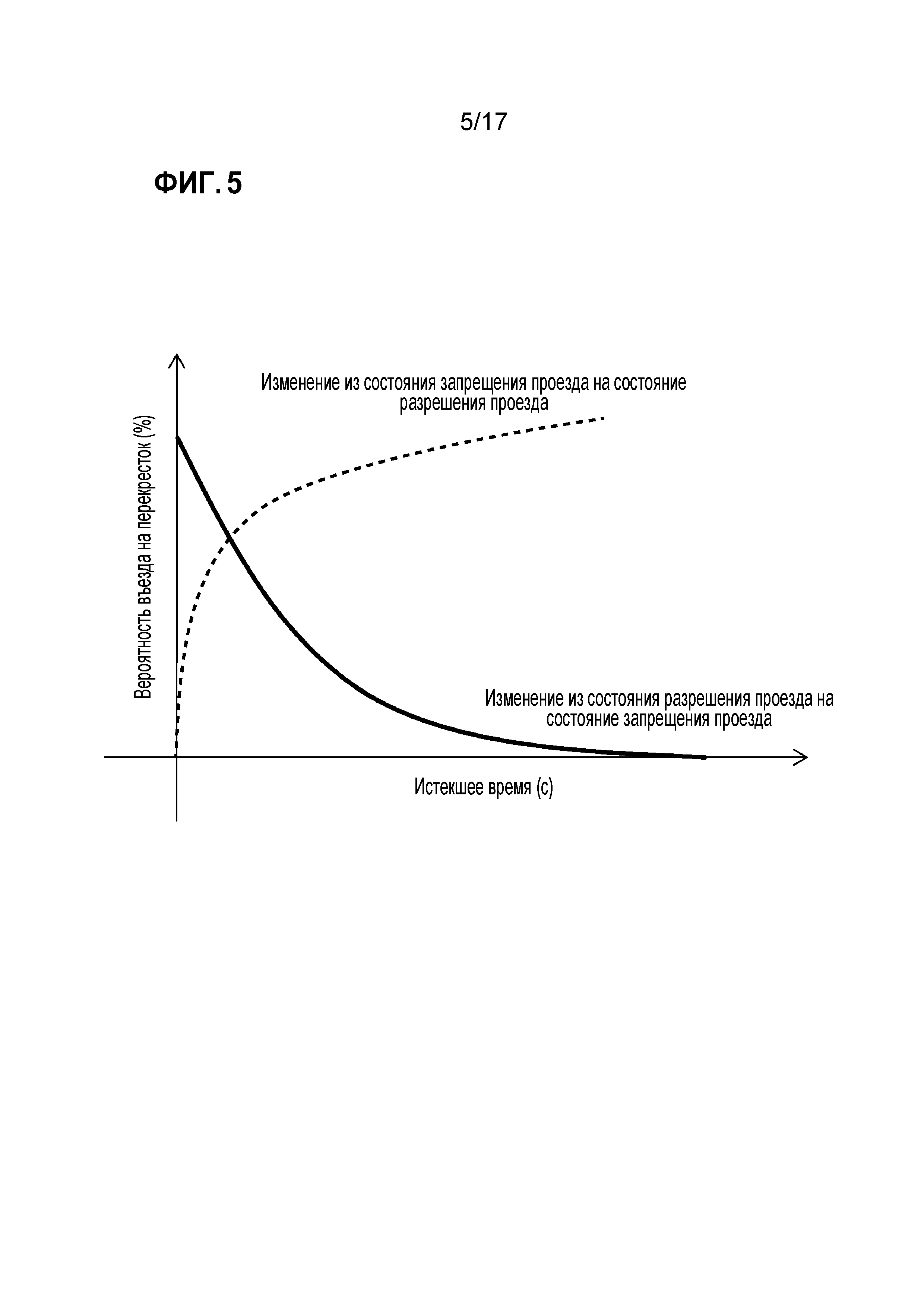
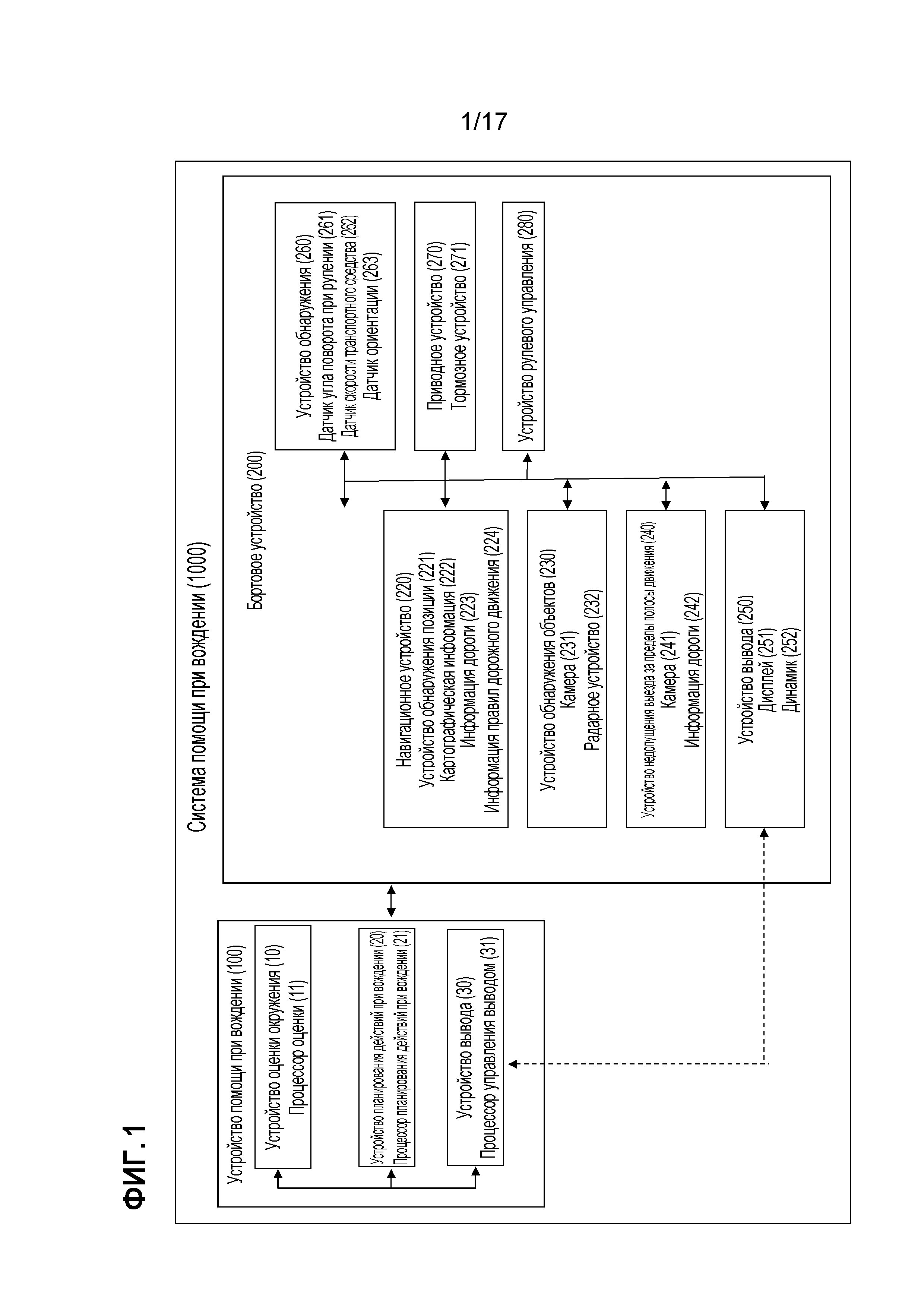
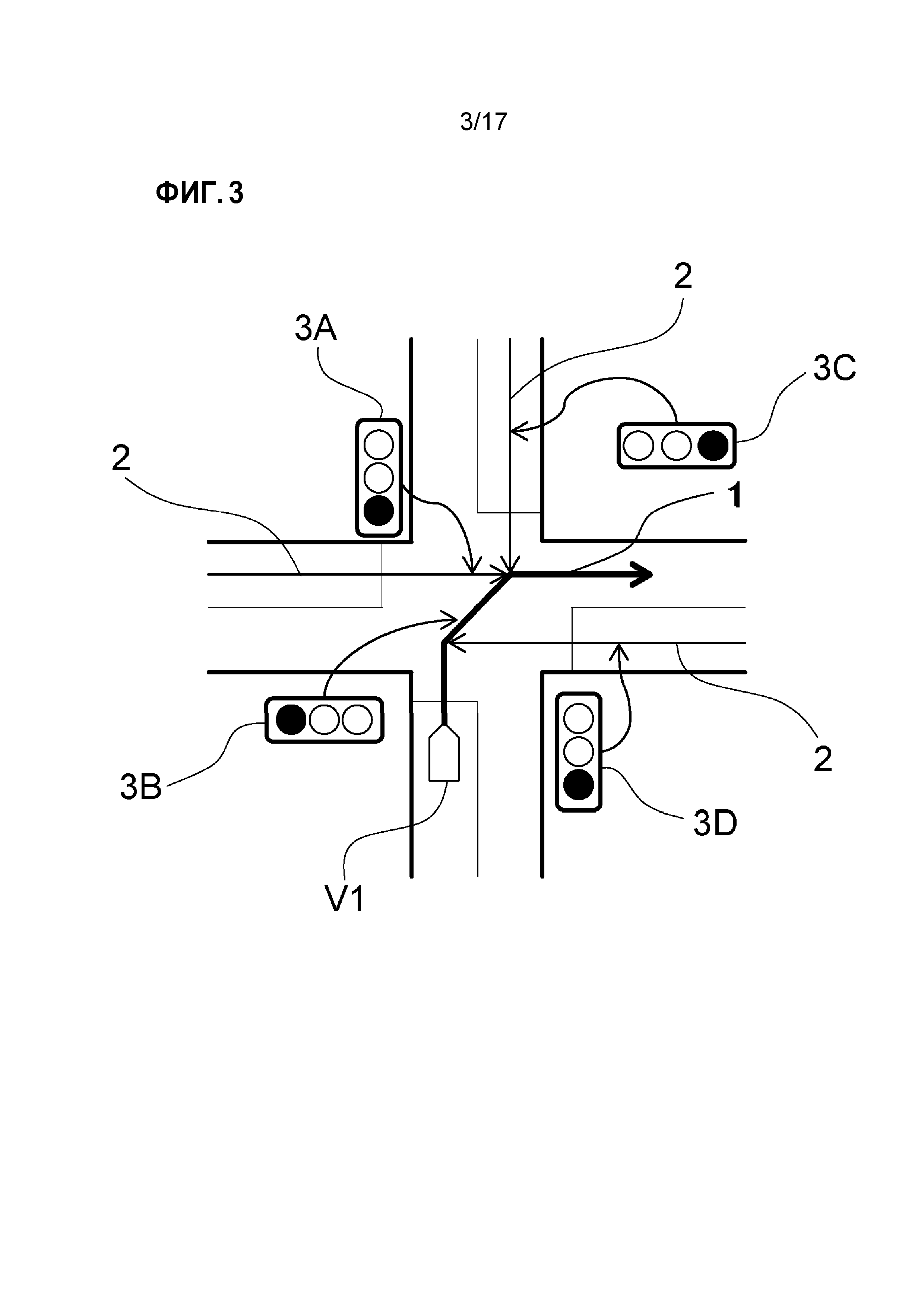
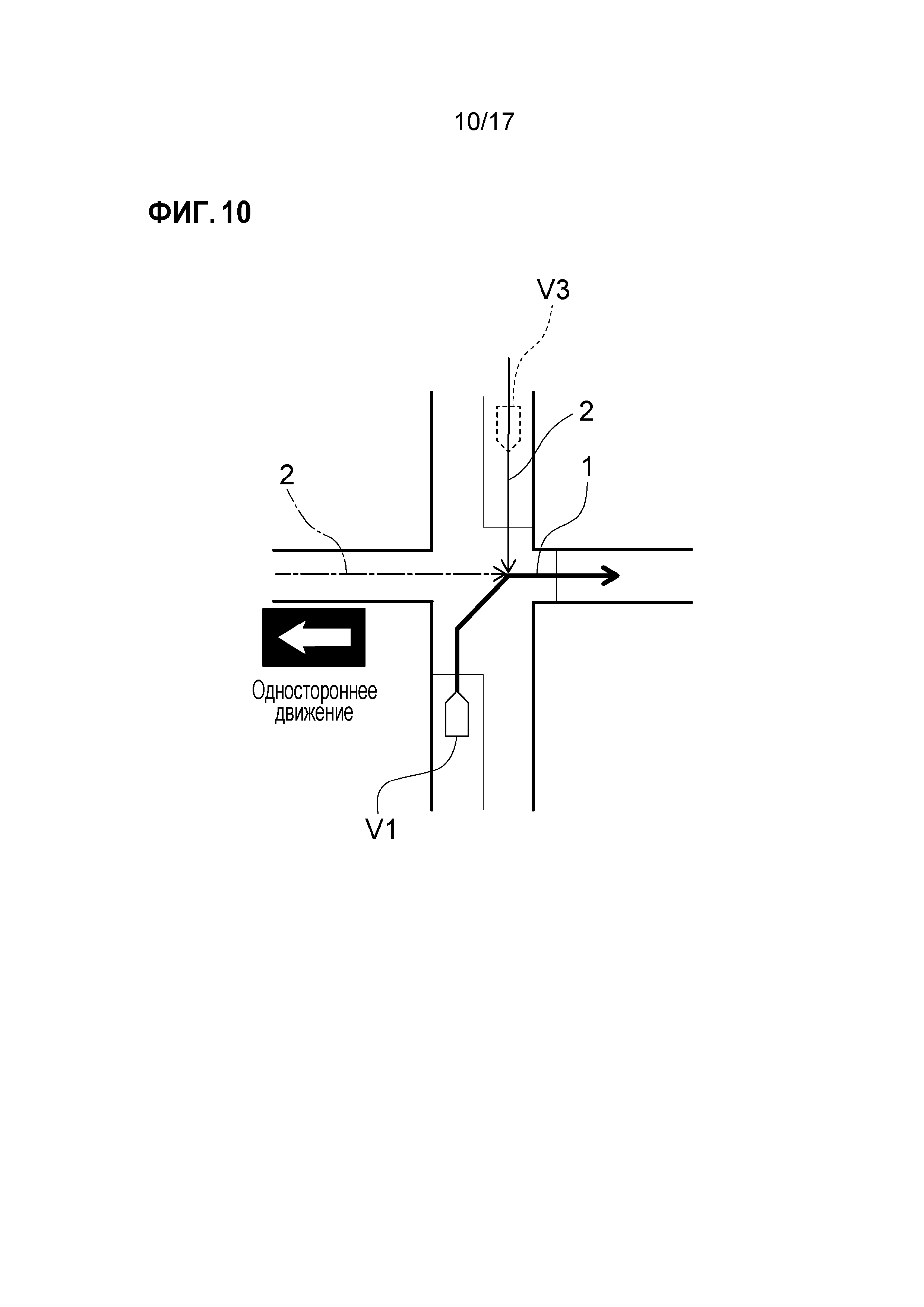
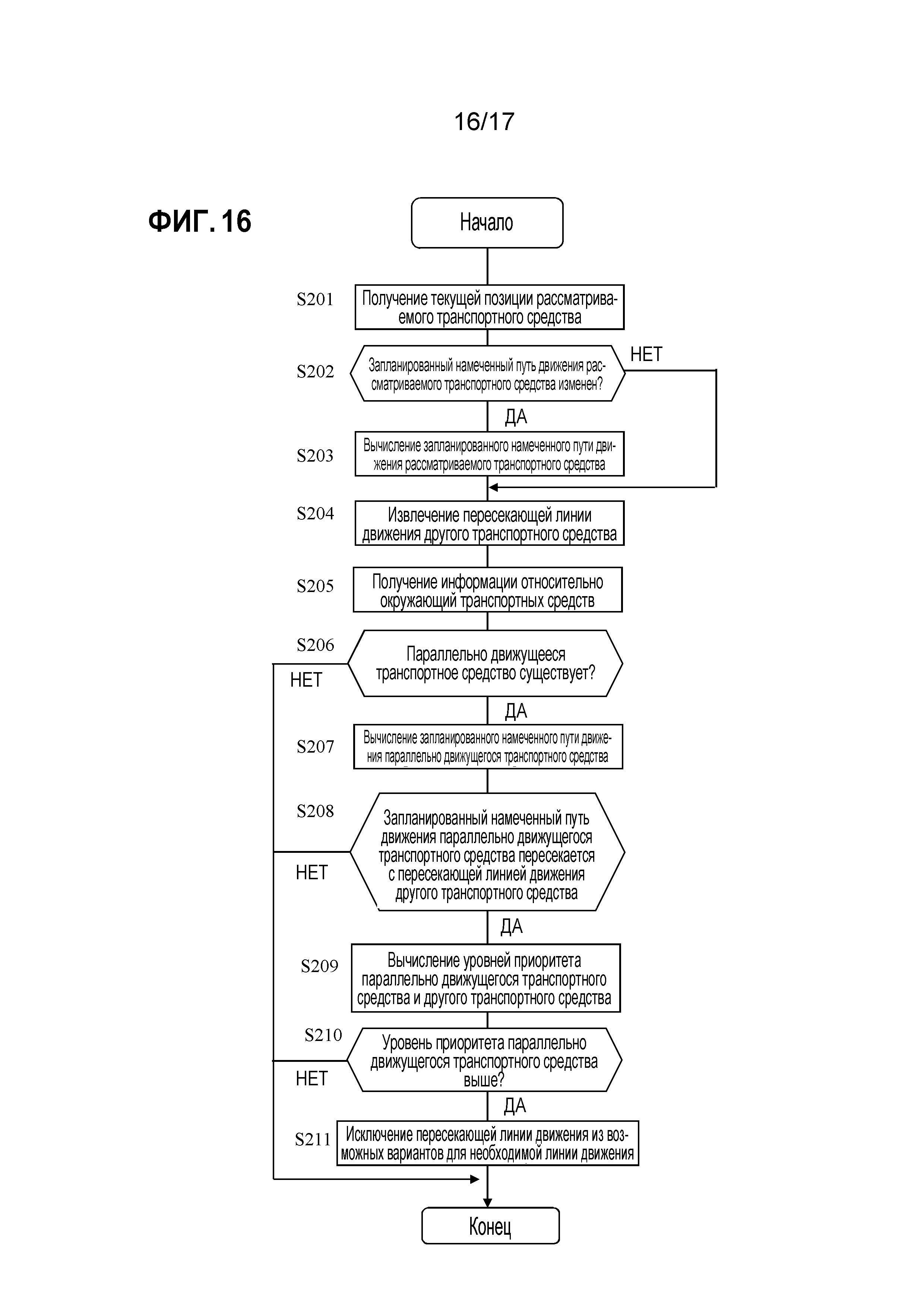
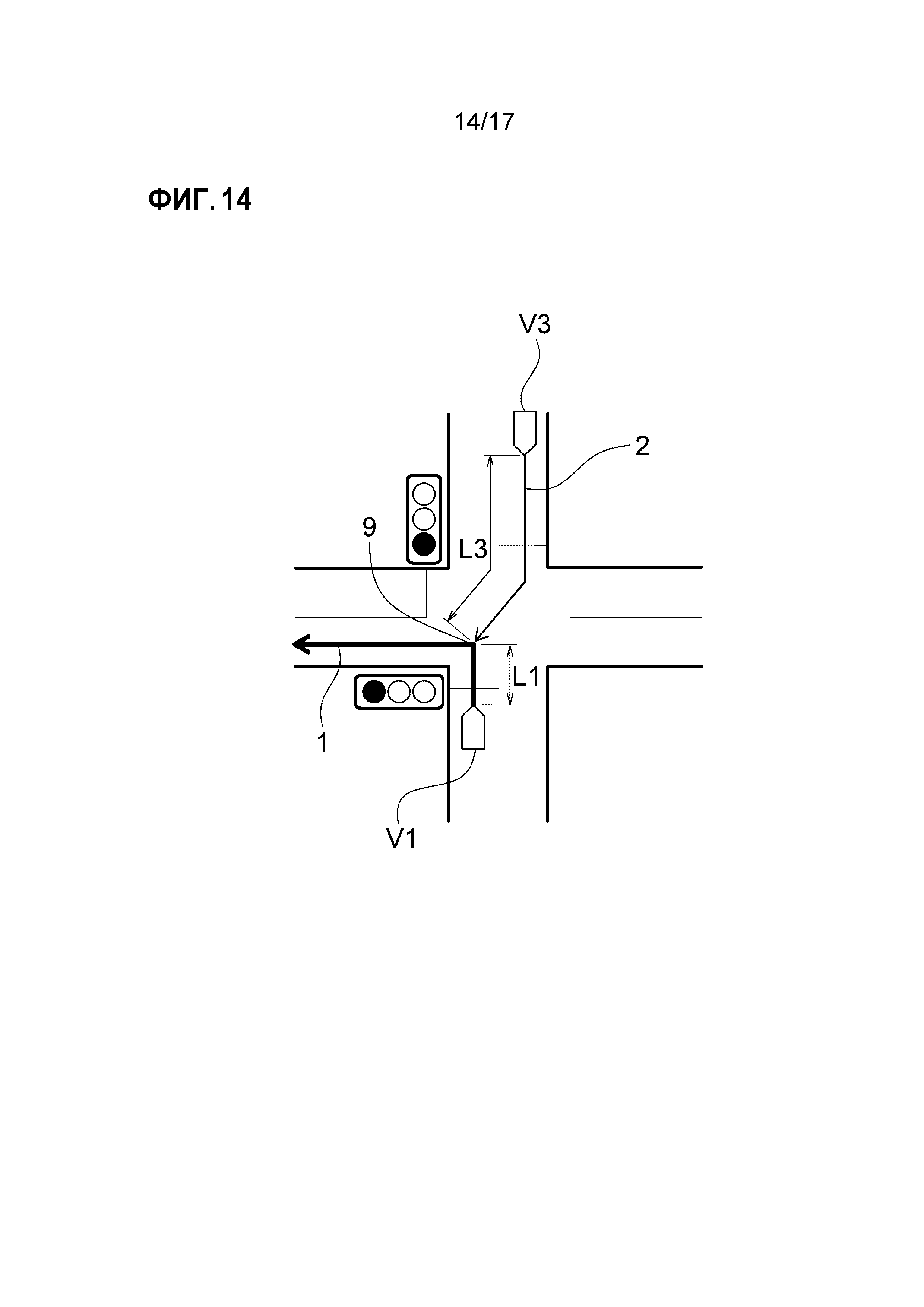
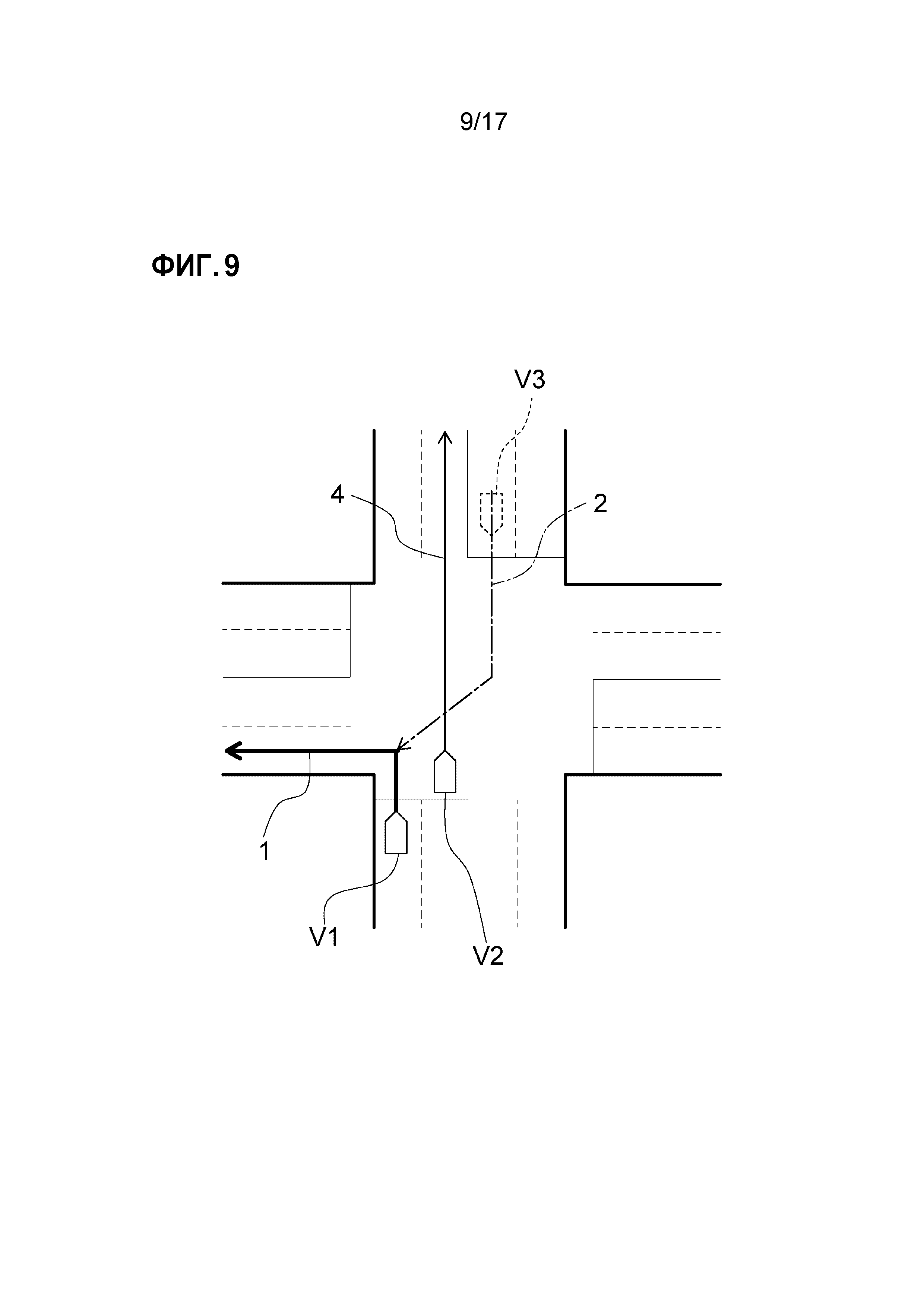
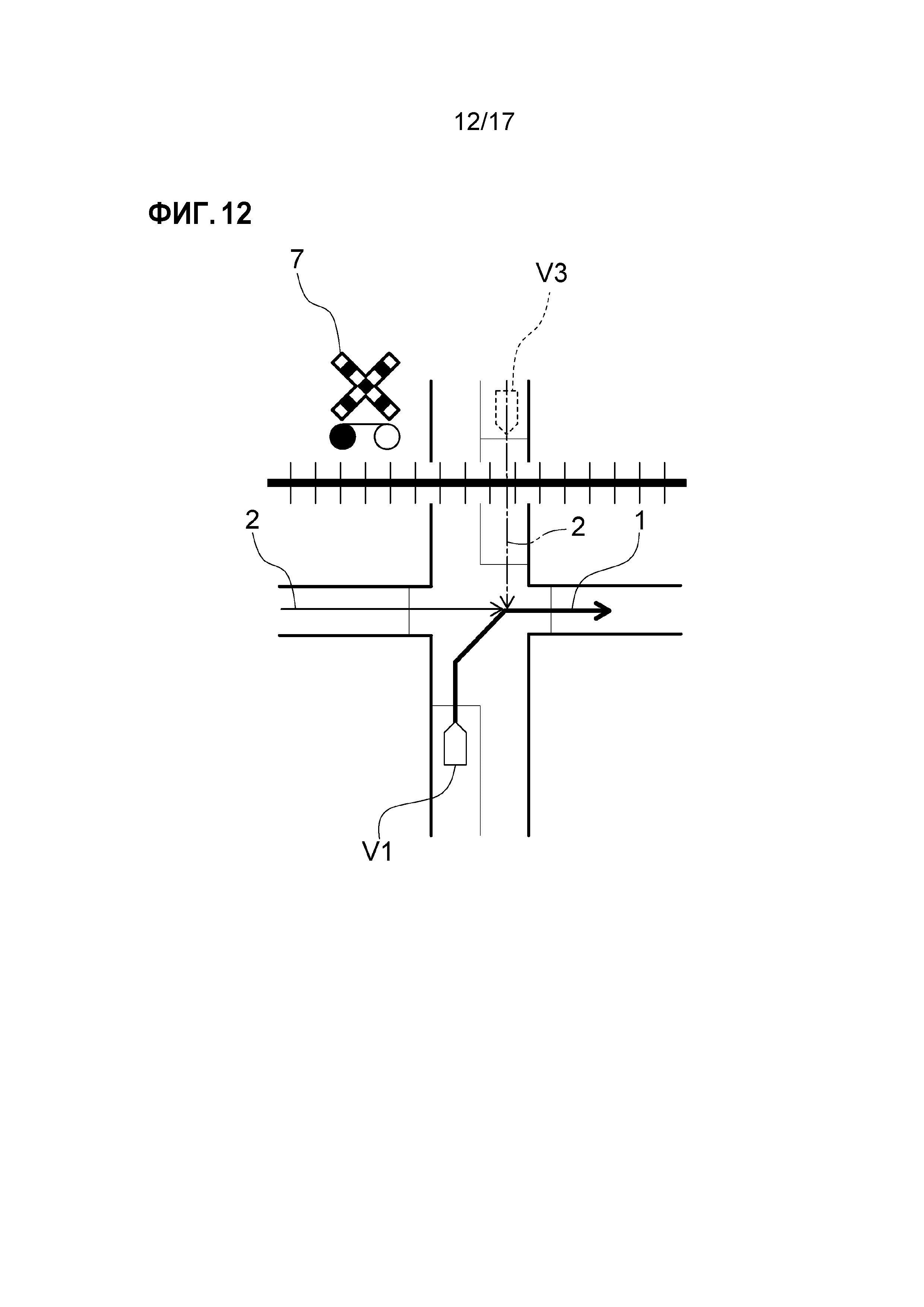
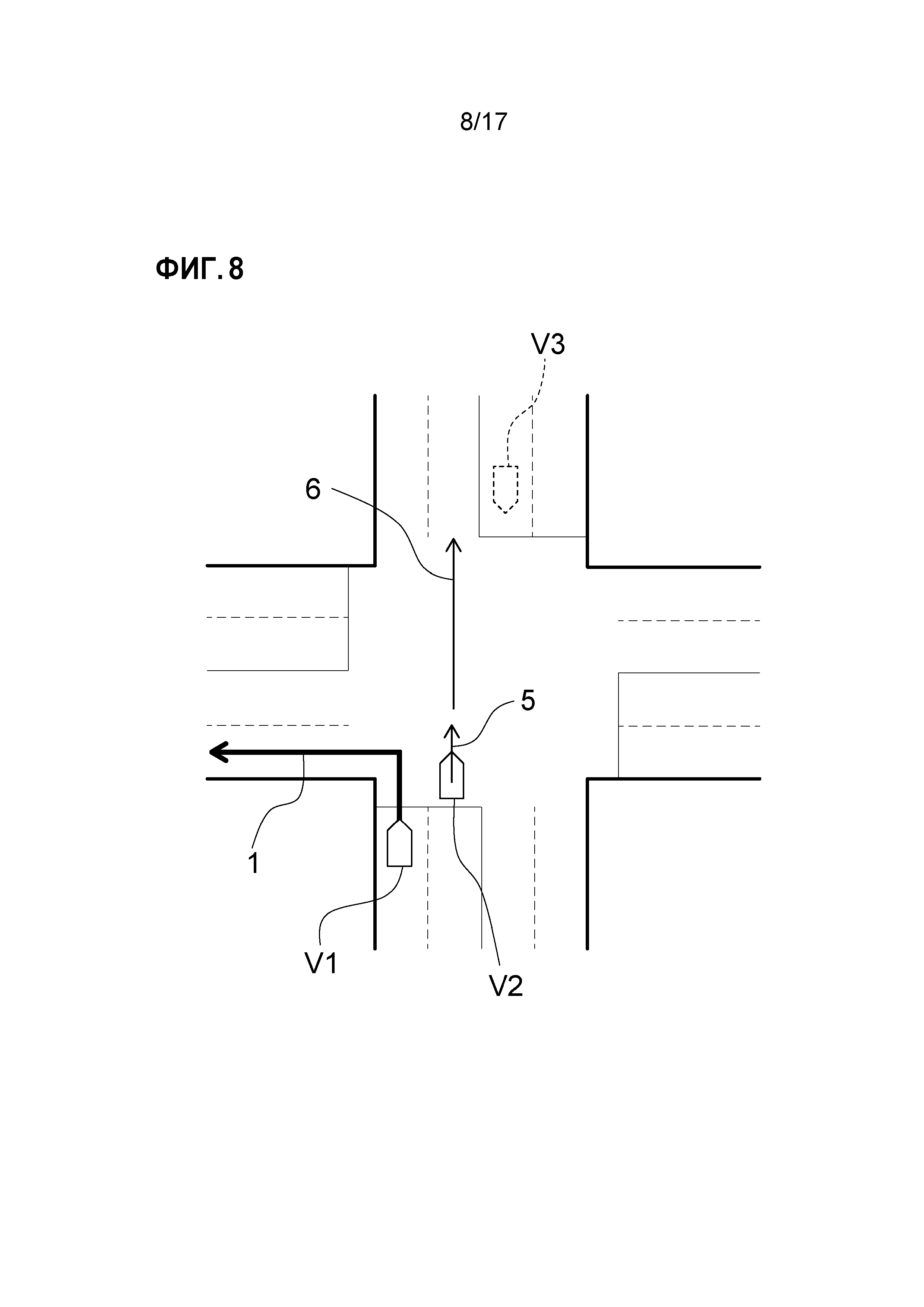
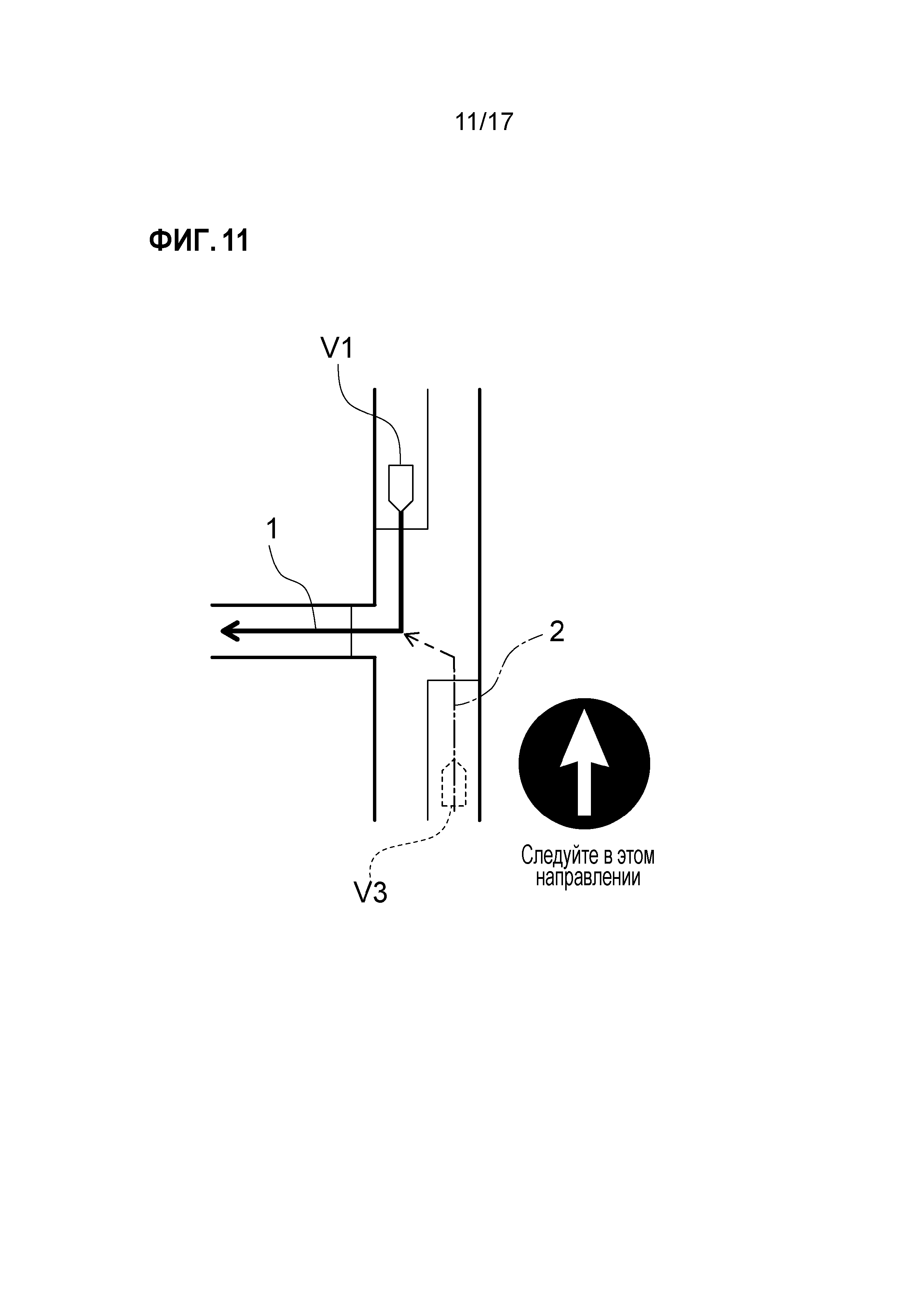
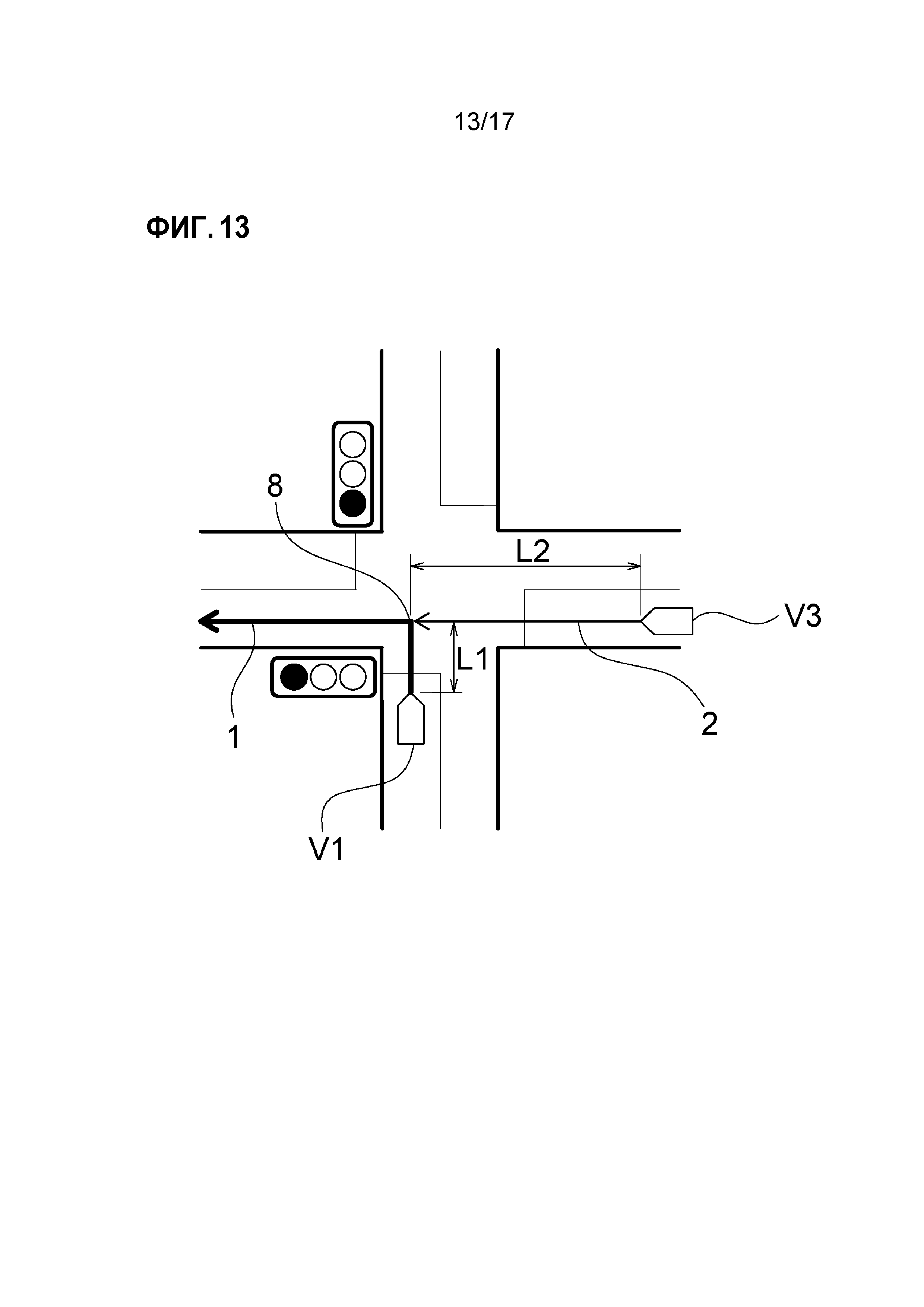
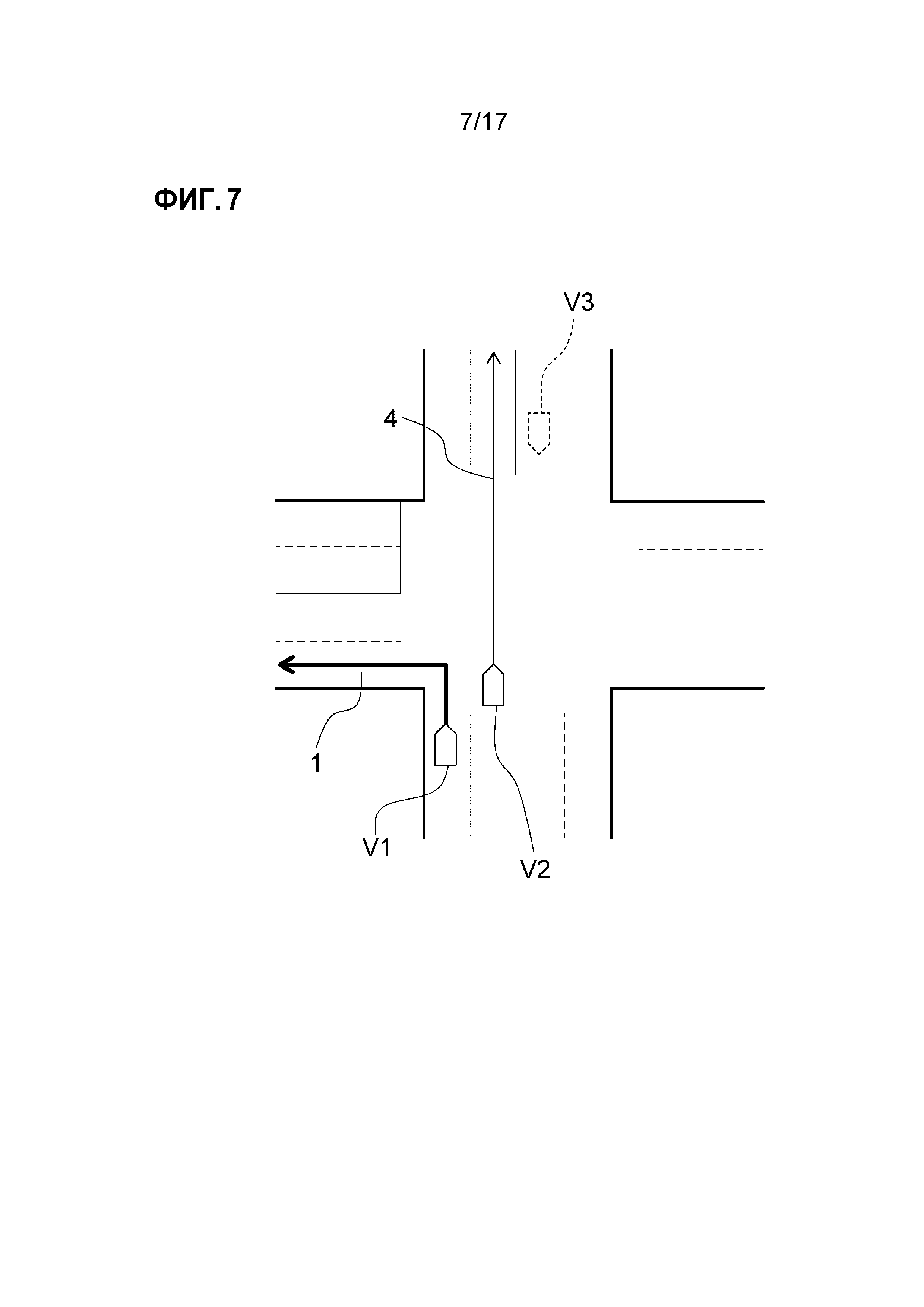
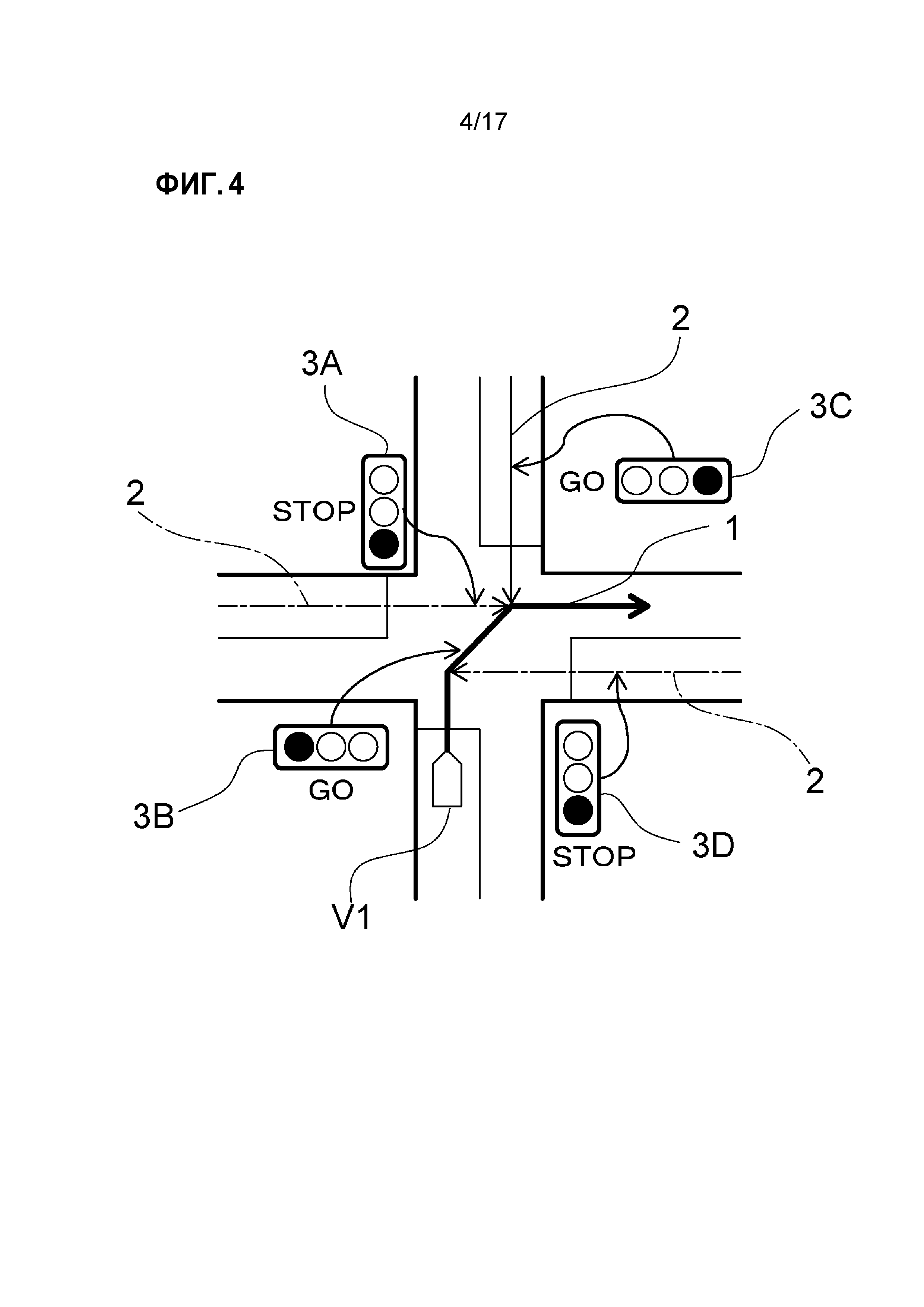
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ управления движением и устройство управления движением
Устройство определения окружения, аппаратура содействия при движении и способ определения окружения
Устройство планирования вождения, аппаратура содействия при движении и способ планирования вождения
Устройство определения окружения, аппаратура содействия при движении и способ определения окружения
Способ и устройство помощи при вождении
Способ помощи вождению и устройство помощи вождению
Способ помощи при смене полосы движения и устройство помощи при смене полосы движения
Способ управления вождением и устройство управления вождением
Способ и устройство коррекции картографических данных
Способ управления вождением и устройство управления вождением

