Результат интеллектуальной деятельности: СПОСОБ ПОМОЩИ ПРИ СМЕНЕ ПОЛОСЫ ДВИЖЕНИЯ И УСТРОЙСТВО ПОМОЩИ ПРИ СМЕНЕ ПОЛОСЫ ДВИЖЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение.
[0001] Настоящее изобретение относится к способу помощи при смене полосы движения и к оборудованию помощи при смене полосы движения.
Уровень техники
[0002] К настоящему времени известна технология определения того, может или нет рассматриваемое транспортное средство сменять полосу движения (например, патентный документ 1: JP2000-020898A). Эта технология включает в себя обнаружение первого расстояния и первой относительной скорости рассматриваемого транспортного средства относительно объекта, который расположен впереди рассматриваемого транспортного средства и в полосе движения, на которую рассматриваемое транспортное средство должно сменять полосу движения, и второго расстояния и второй относительной скорости рассматриваемого транспортного средства относительно объекта, который расположен позади рассматриваемого транспортного средства и в полосе движения, на которую рассматриваемое транспортное средство должно сменять полосу движения, и определение того, может или нет рассматриваемое транспортное средство сменять полосу движения, на основе первого и второго расстояний и первой и второй относительных скоростей.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2000-020898A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, в технологии предшествующего уровня техники, определение в отношении того, является или нет смена полосы движения возможной, выполняется на основе только взаимосвязей между рассматриваемым транспортным средством и объектами, расположенными перед и позади рассматриваемого транспортного средства и в полосе движения, на которую рассматриваемое транспортное средство должно сменять полосу движения, и в силу этого определение того, что смена полосы движения является возможной, может выполняться даже в области, в которой смена полосы движения не рекомендуется по правилам дорожного движения.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ помощи при смене полосы движения и оборудование помощи при смене полосы движения, с помощью которых может надлежащим образом выполняться определение в отношении того, является или нет возможной смена полосы движения.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством идентификации нерекомендованной области, в которой смена полосы движения не рекомендуется, на основе информации дороги, задания области, требуемой для рассматриваемого транспортного средства, чтобы сменять полосу движения, в качестве целевой области определения на основе позиционной информации и информации скорости транспортного средства для рассматриваемого транспортного средства, и когда целевая область определения включает в себя часть или всю нерекомендованную область, выполнения определения того, что смена полосы движения не может выполняться.
Преимущества изобретения
[0007] Согласно настоящему изобретению, может надлежащим образом выполняться определение в отношении того, является или нет смена полосы движения возможной, посредством идентификации нерекомендованной области, в которой смена полосы движения не рекомендуется, на основе информации дороги, и выполнения определения того, что смена полосы движения не может выполняться в нерекомендованной области.
Краткое описание чертежей
[0008] FIG. Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию оборудования управления движением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является схемой, примерно иллюстрирующей окружение, в котором рассматриваемое транспортное средство движется около пешеходного перехода.
Фиг. 3 является схемой, иллюстрирующей пример целевой области определения в примерном окружении, проиллюстрированном на фиг. 2.
Фиг. 4 является схемой, иллюстрирующей пример нерекомендованной области в примерном окружении, проиллюстрированном на фиг. 2.
Фиг. 5 является схемой, иллюстрирующей пример целевой области смежной полосы движения в примерном окружении, проиллюстрированном на фиг. 2.
Фиг. 6 является схемой для описания способа определения того, может или нет смена полосы движения выполняться в примерном окружении, проиллюстрированном на фиг. 2.
Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей процесс помощи при смене полосы движения согласно первому варианту осуществления.
Фиг. 8 является набором схем для описания способа задания целевой области определения согласно второму варианту осуществления.
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процесс помощи при смене полосы движения согласно второму варианту осуществления.
Оптимальный режим осуществления изобретения
[0009] Далее описываются один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, примерно иллюстрируется и описывается оборудование управления движением, оснащенное в транспортном средстве.
[0010] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию оборудования 100 управления движением согласно настоящему варианту осуществления. Как проиллюстрировано на фиг. 1, оборудование 100 управления движением согласно настоящему варианту осуществления включает в себя набор 110 датчиков, картографическую базу данных 120, устройство 130 представления, приводной механизм 140 и устройство 150 управления. Эти устройства соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0011] Набор 110 датчиков включает в себя GPS-устройство, которое обнаруживает позицию рассматриваемого транспортного средства, и датчик скорости транспортного средства, который определяет скорость транспортного средства для рассматриваемого транспортного средства. GPS-устройство обнаруживает радиоволны, передаваемые из множества спутников связи, чтобы периодически получать позиционную информацию рассматриваемого транспортного средства, и обнаруживает текущую позицию рассматриваемого транспортного средства на основе полученной позиционной информации рассматриваемого транспортного средства, информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика скорости транспортного средства. Набор 110 датчиков дополнительно включает в себя камеру, которая захватывает изображение рядом с рассматриваемым транспортным средством, и датчик дальности, который обнаруживает помеху рядом с рассматриваемым транспортным средством. Примеры датчика дальности включают в себя лазерный радар, ультразвуковой датчик, звуковой волновой датчик и инфракрасный датчик.
[0012] Картографическая база 120 данных сохраняет картографическую информацию и информацию дороги. Информация дороги включает в себя информацию относительно граничных линий (к примеру, разделительных линий и бордюрных камней), перекрестков, стоп-линий, пешеходных переходов, форм дорог, кривизны дорог и т.д. для каждой дороги.
[0013] Устройство 130 представления представляет водителю, например, результат определения в отношении того, может или нет рассматриваемое транспортное средство сменять полосу движения. Примеры такого устройства 130 представления включают в себя лампу, установленную в приборной панели, дисплей навигационного устройства и динамик. Например, когда устройство 150 управления определяет то, что смена полосы движения не может выполняться, водитель может принудительно воспринимать то, что смена полосы движения не может выполняться, посредством загорания лампы устройства 130 представления, посредством управления дисплеем навигационного устройства таким образом, чтобы отображать сообщение касательно того, что смена полосы движения не может выполняться, или посредством управления динамиком таким образом, чтобы выводить звук или голос, который информирует касательно того, что смена полосы движения не может выполняться.
[0014] Приводной механизм 140 включает в себя двигатель, тормоз, актуатор рулевого управления и другие необходимые компоненты, которые используются для того, чтобы предоставлять возможность рассматриваемому транспортному средству двигаться. Например, в случае выполнения управления сменой полосы движения для автоматической смены полосы движения в соответствии с командой от водителя, когда устройство 150 управления, которое описывается ниже, определяет то, что смена полосы движения может выполняться, оборудование 100 управления движением может управлять работой двигателя, тормозного актуатора и актуатора рулевого управления, включенных в приводной механизм 140, чтобы за счет этого автоматически выполнять смену полосы движения рассматриваемого транспортного средства.
[0015] Устройство 150 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, также может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. в качестве функциональной схемы.
[0016] Устройство 150 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого достигать следующих функций: функции получения информации рассматриваемого транспортного средства для получения информации относительно рассматриваемого транспортного средства; функции получения информации окружающих условий для получения информации относительно окрестностей рассматриваемого транспортного средства; функции определения смены полосы движения для определения того, может или нет рассматриваемое транспортное средство сменять полосу движения; и функции управления движением для управления движением рассматриваемого транспортного средства. Ниже описываются эти функции устройства 150 управления.
[0017] Функция получения информации рассматриваемого транспортного средства устройства 150 управления служит для того, чтобы получать информацию, которая включает в себя информацию скорости транспортного средства и позиционную информацию рассматриваемого транспортного средства, в качестве информации рассматриваемого транспортного средства. Например, функция получения информации рассматриваемого транспортного средства может служить для того, чтобы получать позиционную информацию рассматриваемого транспортного средства в качестве информации рассматриваемого транспортного средства из GPS-устройства, включенного в набор 110 датчиков, и также может служить для того, чтобы получать информацию скорости транспортного средства для рассматриваемого транспортного средства в качестве информации рассматриваемого транспортного средства из датчика скорости транспортного средства, включенного в набор 110 датчиков. Помимо этого или альтернативно, функция получения информации рассматриваемого транспортного средства может быть выполнена с возможностью получать позиционную информацию рассматриваемого транспортного средства на основе изображения, захваченного посредством камеры, включенной в набор 110 датчиков.
[0018] Функция получения информации окружающих условий устройства 150 управления служит для того, чтобы получать информацию относительно дорог и помех рядом с рассматриваемым транспортным средством в качестве информации окружающих условий. Например, функция получения информации окружающих условий может служить для того, чтобы получать информацию дороги дорог рядом с рассматриваемым транспортным средством в качестве информации окружающих условий. Информация дороги сохраняется в картографической базе данных 120. Таким образом, функция получения информации окружающих условий может служить для того, чтобы получать информацию дороги, которая включает в себя граничные линии (к примеру, разделительные линии и бордюрные камни), перекрестки, стоп-линии, пешеходные переходы, формы дорог и кривизны дорог для дорог рядом с рассматриваемым транспортным средством, в качестве информации окружающих условий. Помимо этого или альтернативно, функция получения информации окружающих условий может служить для того, чтобы получать информацию дороги дорог рядом с рассматриваемым транспортным средством в качестве информации окружающих условий из камеры и/или датчика дальности, включенного в набор 110 датчиков.
[0019] Помимо этого или альтернативно, функция получения информации окружающих условий также может служить для того, чтобы получать информацию относительно помех, присутствующих рядом с рассматриваемым транспортным средством, в качестве информации окружающих условий из камеры и/или датчика дальности, включенного в набор 110 датчиков. Например, функция получения информации окружающих условий может служить для того, чтобы получать информацию относительно присутствия или отсутствия находящегося в соседней полосе движения транспортного средства, движущегося рядом с рассматриваемым транспортным средством в качестве информации окружающих условий из камеры и/или датчика дальности, включенного в набор 110 датчиков. Когда такое находящееся в соседней полосе движения транспортное средство присутствует, функция получения информации окружающих условий может служить для того, чтобы получать информацию относительно позиции, направления движения и скорости транспортного средства для находящегося в соседней полосе движения транспортного средства в качестве информации окружающих условий из камеры и/или датчика дальности, включенного в набор 110 датчиков.
[0020] Функция определения смены полосы движения устройства 150 управления служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство сменять полосу движения. Со ссылкой на окружение, проиллюстрированное на фиг. 2, ниже описывается способ определения того, является или нет смена полосы движения возможной. Этот способ осуществляется с использованием функции определения смены полосы движения. Фиг. 2 является схемой, примерно иллюстрирующей окружение, в котором рассматриваемое транспортное средство V1 движется перед пешеходным переходом. В нижеприведенном описании, полоса движения, в которой движется рассматриваемое транспортное средство V1, упоминается как "рассматриваемая полоса движения", и полоса движения, смежная с рассматриваемой полосой движения, упоминается как "смежная полоса движения".
[0021] Во-первых, как проиллюстрировано на фиг. 2, функция определения смены полосы движения служит для того, чтобы вычислять запланированную траекторию движения, когда рассматриваемое транспортное средство V1 сменяет полосу движения. В частности, в настоящем варианте осуществления, функция определения смены полосы движения служит для того, чтобы вычислять плавную запланированную траекторию движения в соответствии со скоростью транспортного средства для рассматриваемого транспортного средства V1 таким образом, что пассажиры рассматриваемого транспортного средства V1 не испытывают некомфортное ощущение и/или неудобство по мере того, как рассматриваемое транспортное средство V1 резко поворачивает. Например, когда рассматриваемое транспортное средство V1 движется со скоростью 60 км/ч, чтобы получать плавную запланированную траекторию движения, функция определения смены полосы движения может служить для того, чтобы вычислять запланированную траекторию движения таким образом, что время, требуемое для смены полосы движения (время, требуемое для рассматриваемого транспортного средства V1, чтобы перемещаться из текущей позиции в целевую позицию P1), составляет 3 секунды. Когда рассматриваемое транспортное средство V1 движется со скоростью больше 60 км/ч, чтобы рассматриваемое транспортное средство V1 могло плавно сменять полосу движения, функция определения смены полосы движения может служить для того, чтобы вычислять запланированную траекторию движения таким образом, что рассматриваемое транспортное средство V1 сменяет полосу движения при необходимости большего времени, чем 3 секунды.
[0022] Затем функция определения смены полосы движения служит для того, чтобы задавать, в рассматриваемой полосе движения, целевую область R1 определения для определения того, является или нет смена полосы движения возможной, на основе информации скорости транспортного средства и позиционной информации рассматриваемого транспортного средства, полученной с использованием функции получения информации рассматриваемого транспортного средства. Функция определения смены полосы движения в первую очередь служит для того, чтобы вычислять проезжаемое расстояние, требуемое для рассматриваемого транспортного средства V1, чтобы сменять полосу движения. Например, когда рассматриваемое транспортное средство V1 движется со скоростью 60 км/ч, и запланированная траектория движения вычисляется таким образом, что время, требуемое для смены полосы движения, составляет 3 секунды, функция определения смены полосы движения может служить для того, чтобы вычислять проезжаемое расстояние, требуемое для рассматриваемого транспортного средства V1, чтобы сменять полосу движения, в качестве 50 м. Затем, как проиллюстрировано на фиг. 3, функция определения смены полосы движения может служить для того, чтобы задавать конкретную область для области в рассматриваемой полосе движения в качестве целевой области R1 определения. Конкретная область представляет собой область, которая задается от позиции рассматриваемого транспортного средства V1 (его передней концевой части) до вычисленного проезжаемого расстояния. Например, когда проезжаемое расстояние, требуемое для рассматриваемого транспортного средства, чтобы сменять полосу движения, составляет 50 м, как проиллюстрировано на фиг. 3, функция определения смены полосы движения может служить для того, чтобы задавать, в качестве целевой области R1 определения, конкретную область для области в рассматриваемой полосе движения от позиции рассматриваемого транспортного средства V1 до проезжаемого расстояния в 50 м, требуемого для рассматриваемого транспортного средства V1, чтобы сменять полосу движения.
[0023] Затем функция определения смены полосы движения служит для того, чтобы задавать область, в которой смена полосы движения не рекомендуется, в качестве нерекомендованной области R2 на основе информации дороги для дороги рядом с рассматриваемым транспортным средством. В частности, функция определения смены полосы движения служит для того, чтобы задавать область, в которой смена полосы движения не рекомендуется, к примеру, область, в которой смена полосы движения запрещается посредством правил дорожного движения, в качестве нерекомендованной области R2 на основе информации дороги для дороги, лежащей впереди рассматриваемого транспортного средства, полученной с использованием функции получения информации окружающих условий. Например, когда смена полосы движения запрещается посредством правил дорожного движения в области в 30 м непосредственно перед пешеходным переходом, как проиллюстрировано на фиг. 4, функция определения смены полосы движения может служить для того, чтобы задавать область 30 м непосредственно перед пешеходным переходом в области в рассматриваемой полосе движения в качестве нерекомендованной области R2.
[0024] Затем, функция определения смены полосы движения служит для того, чтобы задавать, в смежной полосе движения, целевую область R3 смежной полосы движения для определения того, является или нет возможной смена полосы движения. В частности, функция определения смены полосы движения в первую очередь служит для того, чтобы вычислять расстояние D1 между транспортными средствами в направлении вперед и расстояние D2 между транспортными средствами в направлении назад, которые представляют собой расстояния после смены полосы движения. Например, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние между транспортными средствами в направлении вперед на основе времени между транспортными средствами (THW: времени проезда расстояния между движущимися в потоке транспортными средствами) и расстояние между транспортными средствами в направлении вперед на основе допустимого запаса времени до столкновения (TTC: времени до столкновения) и получают большее расстояние из расстояния между транспортными средствами в направлении вперед на основе времени (THW) между транспортными средствами и расстояния между транспортными средствами в направлении вперед на основе допустимого запаса (TTC) времени до столкновения в качестве расстояния D1 между транспортными средствами в направлении вперед после смены полосы движения. Аналогично, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние между транспортными средствами в направлении назад на основе времени (THW) между транспортными средствами и расстояние между транспортными средствами в направлении назад на основе допустимого запаса (TTC) времени до столкновения и получать большее расстояние из расстояния между транспортными средствами в направлении назад на основе времени (THW) между транспортными средствами и расстояния между транспортными средствами в направлении назад на основе допустимого запаса (TTC) времени до столкновения в качестве расстояния D2 между транспортными средствами в направлении назад после смены полосы движения. Ниже подробно описываются способы вычисления расстояния D1 между транспортными средствами в направлении вперед и расстояния D2 между транспортными средствами в направлении назад.
[0025] Например, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние, полученное посредством умножения требуемого времени (THW) между транспортными средствами после смены полосы движения на скорость транспортного средства для рассматриваемого транспортного средства V1 в качестве расстояния между транспортными средствами в направлении вперед на основе времени (THW) между транспортными средствами. Требуемое время (THW) между транспортными средствами после смены полосы движения не ограничено конкретным образом и может надлежащим образом задаваться для каждой скорости транспортного средства, к примеру, посредством экспериментов. Например, в примере, проиллюстрированном на фиг. 5, когда скорость транспортного средства для рассматриваемого транспортного средства V1 составляет 60 км/ч, и требуемое время (THW) между транспортными средствами после смены полосы движения составляет 2 секунды, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние между транспортными средствами в направлении вперед на основе времени (THW) между транспортными средствами в качестве 33 м.
[0026] Помимо этого, когда рассматриваемое транспортное средство V1 приближается к едущему впереди в смежной полосе движения транспортному средству V2, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние, полученное посредством умножения требуемого допустимого запаса (TTC) времени до столкновения после смены полосы движения на относительную скорость транспортного средства между рассматриваемым транспортным средством V1 и едущим впереди в смежной полосе движения транспортным средством V2 в качестве расстояния между транспортными средствами в направлении вперед на основе допустимого запаса (TTC) времени до столкновения. Требуемый допустимый запас (TTC) времени до столкновения после смены полосы движения может надлежащим образом задаваться для каждой скорости транспортного средства, к примеру, посредством экспериментов. Например, в примере, проиллюстрированном на фиг. 5, когда относительная скорость транспортного средства между рассматриваемым транспортным средством V1 и едущим впереди в смежной полосе движения транспортным средством V2 составляет 10 км/ч, и требуемый допустимый запас (TTC) времени до столкновения после смены полосы движения составляет 5 секунд, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние между транспортными средствами в направлении вперед на основе допустимого запаса (TTC) времени до столкновения в качестве 28 м.
[0027] Затем функция определения смены полосы движения служит для того, чтобы получать большее расстояние из расстояния между транспортными средствами в направлении вперед на основе времени (THW) между транспортными средствами и расстояния между транспортными средствами в направлении вперед на основе допустимого запаса (TTC) времени до столкновения в качестве расстояния D1 между транспортными средствами в направлении вперед после смены полосы движения. Например, в примере, проиллюстрированном на фиг. 5, расстояние между транспортными средствами в направлении вперед в 33 м на основе времени (THW) между транспортными средствами превышает расстояние между транспортными средствами в направлении вперед в 28 м на основе допустимого запаса (TTC) времени до столкновения, и функция определения смены полосы движения в силу этого может служить для того, чтобы получать расстояние D1 между транспортными средствами в направлении вперед после смены полосы движения в качестве 33 м. Когда рассматриваемое транспортное средство V1 не приближается к едущему впереди в смежной полосе движения транспортному средству V2, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние между транспортными средствами в направлении вперед на основе времени (THW) между транспортными средствами в качестве расстояния D1 между транспортными средствами в направлении вперед после смены полосы движения без вычисления расстояния между транспортными средствами в направлении вперед на основе допустимого запаса (TTC) времени до столкновения.
[0028] Помимо этого или альтернативно, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние, полученное посредством умножения требуемого времени (THW) между транспортными средствами после смены полосы движения на общую скорость транспортного средства для транспортного средства, движущегося в смежной полосе движения (подробности описываются ниже) в качестве расстояния между транспортными средствами в направлении назад на основе времени (THW) между транспортными средствами. Например, когда общая скорость транспортного средства для транспортного средства, движущегося в смежной полосе движения, составляет 70 км/ч, и требуемое время (THW) между транспортными средствами после смены полосы движения составляет 2 секунды, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние между транспортными средствами в направлении назад на основе времени (THW) между транспортными средствами в качестве 39 м. Функция определения смены полосы движения может служить для того, чтобы получать ограничение скорости дороги, по которой движется рассматриваемое транспортное средство V1, в качестве общей скорости транспортного средства для транспортного средства, движущегося в смежной полосе движения. Помимо этого или альтернативно, функция определения смены полосы движения может служить для того, чтобы получать статистическое значение скорости транспортного средства, когда множество транспортных средств движутся в смежной полосе движения в предыдущие моменты времени, в качестве общей скорости транспортного средства для транспортного средства, движущегося в смежной полосе движения. В таком случае, статистические значения, такие как среднее значение, медианное значение и значение моды скорости транспортного средства, когда множество транспортных средств движутся в смежной полосе движения в предыдущие моменты времени, могут предварительно вычисляться, например, на внешнем сервере (не проиллюстрирован), чтобы за счет этого обеспечивать возможность функции определения смены полосы движения служить для того, чтобы получать, из внешнего сервера, статистическое значение скорости транспортного средства, когда множество транспортных средств движутся в смежной полосе движения в предыдущие моменты времени, в качестве информации относительно общей скорости транспортного средства для транспортного средства, движущегося в смежной полосе движения.
[0029] Помимо этого, когда едущее сзади в смежной полосе движения транспортное средство V3 приближается к рассматриваемому транспортному средству V1, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние, полученное посредством умножения требуемого допустимого запаса (TTC) времени до столкновения после смены полосы движения на относительную скорость транспортного средства между рассматриваемым транспортным средством V1 и едущим сзади в смежной полосе движения транспортным средством V3 в качестве расстояния между транспортными средствами в направлении назад на основе допустимого запаса (TTC) времени до столкновения. Например, в примере, проиллюстрированном на фиг. 5, когда относительная скорость транспортного средства между едущим сзади в смежной полосе движения транспортным средством V3 и рассматриваемым транспортным средством V1 составляет 10 км/ч, и требуемый допустимый запас (TTC) времени до столкновения после смены полосы движения составляет 5 секунд, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние между транспортными средствами в направлении назад на основе допустимого запаса (TTC) времени до столкновения в качестве 28 м.
[0030] Затем функция определения смены полосы движения служит для того, чтобы получать большее расстояние из расстояния между транспортными средствами в направлении назад на основе времени (THW) между транспортными средствами и расстояния между транспортными средствами в направлении назад на основе допустимого запаса (TTC) времени до столкновения в качестве расстояния D2 между транспортными средствами в направлении назад после смены полосы движения. Например, в примере, проиллюстрированном на фиг. 5, расстояние между транспортными средствами в направлении назад в 39 м на основе времени (THW) между транспортными средствами превышает расстояние между транспортными средствами в направлении назад в 28 м на основе допустимого запаса (TTC) времени до столкновения, и расстояние D2 между транспортными средствами в направлении назад после смены полосы движения в силу этого может получаться в качестве 39 м. Когда едущее сзади в смежной полосе движения транспортное средство V3 не приближается к рассматриваемому транспортному средству V1, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние между транспортными средствами в направлении назад на основе времени (THW) между транспортными средствами в качестве расстояния D2 между транспортными средствами в направлении назад после смены полосы движения без вычисления расстояния между транспортными средствами в направлении назад на основе допустимого запаса (TTC) времени до столкновения.
[0031] Функция определения смены полосы движения дополнительно служит для того, чтобы задавать целевую область R3 смежной полосы движения в смежной полосе движения на основе расстояния D1 между транспортными средствами в направлении вперед после смены полосы движения и расстояния D2 между транспортными средствами в направлении назад после смены полосы движения. Например, как проиллюстрировано на фиг. 5, функция определения смены полосы движения может служить для того, чтобы задавать конкретную область для области в смежной полосе движения в качестве целевой области R3 смежной полосы движения. Конкретная область представляет собой область, которая задается от позиции P2, отстоящей вперед от передней концевой части рассматриваемого транспортного средства на расстояние D1 между транспортными средствами в направлении вперед, до позиции P3, отстоящей назад от задней концевой части рассматриваемого транспортного средства на расстояние D2 между транспортными средствами в направлении назад. В альтернативном варианте осуществления, например, функция определения смены полосы движения может быть выполнена с возможностью задавать область, которая задается от позиции, отстоящей вперед от центральной позиции рассматриваемого транспортного средства на расстояние D1 между транспортными средствами в направлении вперед, до позиции, отстоящей назад от центральной позиции рассматриваемого транспортного средства на расстояние D2 между транспортными средствами в направлении назад, в качестве целевой области R3 смежной полосы движения. В этом случае, когда расстояние D1 между транспортными средствами в направлении вперед составляет 33 м, и расстояние D2 между транспортными средствами в направлении назад составляет 39 м, например, длина целевой области R3 смежной полосы движения составляет 72 м.
[0032] Затем функция определения смены полосы движения служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство сменять полосу движения, на основе целевой области R1 определения, нерекомендованной области R2 и целевой области R3 смежной полосы движения. В частности, функция определения смены полосы движения в первую очередь служит для того, чтобы определять то, включает либо нет целевая область R1 определения в себя часть или всю нерекомендованную область R2. После этого, когда целевая область R1 определения включает в себя часть или всю нерекомендованную область R2, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство не может сменять полосу движения. Например, в примере, проиллюстрированном на фиг. 6, целевая область R1 определения включает в себя часть нерекомендованной области R2 (целевая область R1 определения и нерекомендованная область R2 частично перекрывают друг друга), и функция определения смены полосы движения в силу этого определяет то, что рассматриваемое транспортное средство V1 не может сменять полосу движения.
[0033] Когда целевая область R1 определения не включает в себя часть нерекомендованной области R2, функция определения смены полосы движения служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство сменять полосу движения, на основе взаимосвязи между целевой областью R3 смежной полосы движения и находящимся в смежной полосе движения транспортным средством. В частности, функция определения смены полосы движения в первую очередь служит для того, чтобы определять то, присутствует или нет находящееся в смежной полосе движения транспортное средство в целевой области R3 смежной полосы движения. Когда находящееся в смежной полосе движения транспортное средство не присутствует в целевой области R3 смежной полосы движения, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство может сменять полосу движения. С другой стороны, когда одно или более находящихся в смежной полосе движения транспортных средств присутствуют в целевой области R3 смежной полосы движения, функция определения смены полосы движения дополнительно служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство V1 сменять полосу движения, на основе уровня CV2 близости едущего впереди транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, приближающегося к рассматриваемому транспортному средству V1, и/или уровня CV3 близости едущего сзади транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3, приближающегося к рассматриваемому транспортному средству V1.
[0034] Например, функция определения смены полосы движения служит для того, чтобы вычислять время (THWV2) между транспортными средствами для рассматриваемого транспортного средства V1 относительно едущего впереди в смежной полосе движения транспортного средства V2 и допустимый запас (TTCV2) времени до столкновения для рассматриваемого транспортного средства V1 относительно едущего впереди в смежной полосе движения транспортного средства V2. Затем функция определения смены полосы движения может служить для того, чтобы вычислять уровень CV2 близости едущего впереди транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, приближающегося к рассматриваемому транспортному средству V1, на основе времени (THWV2) между транспортными средствами для рассматриваемого транспортного средства V1 относительно едущего впереди в смежной полосе движения транспортного средства V2 и допустимого запаса (TTCV2) времени до столкновения для рассматриваемого транспортного средства V1 относительно едущего впереди в смежной полосе движения транспортного средства V2, как представлено, например, посредством следующего уравнения (1).
Уровень близости едущего впереди транспортного средства CV2=1/THWV2+4/TTCV2... (1)
[0035] Аналогично, функция определения смены полосы движения служит для того, чтобы вычислять время (THWV3) между транспортными средствами для рассматриваемого транспортного средства V1 относительно едущего сзади в смежной полосе движения транспортного средства V3 и допустимый запас (TTCV3) времени до столкновения для рассматриваемого транспортного средства V1 относительно едущего сзади в смежной полосе движения транспортного средства V3. Затем функция определения смены полосы движения может служить для того, чтобы вычислять уровень CV3 близости едущего сзади транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3, приближающегося к рассматриваемому транспортному средству V1, на основе времени (THWV3) между транспортными средствами для рассматриваемого транспортного средства V1 относительно едущего сзади в смежной полосе движения транспортного средства V3 и допустимого запаса (TTCV3) времени до столкновения для рассматриваемого транспортного средства V1 относительно едущего сзади в смежной полосе движения транспортного средства V3, как представлено, например, посредством следующего уравнения (2).
Уровень близости едущего сзади транспортного средства CV3=1/THWV3+4/TTCV3... (2)
[0036] Например, в случае если едущее сзади в смежной полосе движения транспортное средство V3 приближается к рассматриваемому транспортному средству V1 сзади, когда время (THWV3) между транспортными средствами для рассматриваемого транспортного средства V1 относительно едущего сзади в смежной полосе движения транспортного средства V3 составляет 2 секунды, и допустимый запас (TTCV3) времени до столкновения для рассматриваемого транспортного средства V1 относительно едущего сзади в смежной полосе движения транспортного средства V3 составляет 5 секунд, функция определения смены полосы движения может служить для того, чтобы получать уровень CV3 близости едущего сзади транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3, приближающегося к рассматриваемому транспортному средству V1, в качестве 1,3 из вышеуказанного уравнения (2).
[0037] После этого, когда уровень CV2 близости едущего впереди транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, приближающегося к рассматриваемому транспортному средству V1, и уровень CV3 близости едущего сзади транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3, приближающегося к рассматриваемому транспортному средству V1, ниже соответствующих предварительно определенных пороговых значений, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство V1 может сменять полосу движения. С другой стороны, когда уровень CV2 близости едущего впереди транспортного средства или уровень CV3 близости едущего сзади транспортного средства не ниже соответствующего предварительно определенного порогового значения, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство V1 не может сменять полосу движения. Пороговое значение уровня CV2 близости едущего впереди транспортного средства и пороговое значение уровня CV3 близости едущего сзади транспортного средства не ограничены конкретным образом и могут надлежащим образом задаваться. Пороговое значение уровня CV2 близости едущего впереди транспортного средства и пороговое значение уровня CV3 близости едущего сзади транспортного средства могут быть идентичным значением или также могут быть различными значениями.
[0038] Функция управления движением устройства 150 управления служит для того, чтобы управлять автоматизированным движением рассматриваемого транспортного средства. Например, функция управления движением может служить для того, чтобы управлять работой приводного механизма 140, такого как актуатор рулевого управления, таким образом, что рассматриваемое транспортное средство движется в рассматриваемой полосе движения, чтобы за счет этого выполнять управление удержанием в полосе движения для управления позицией движения рассматриваемого транспортного средства в направлении ширины дороги. Помимо этого или альтернативно, функция управления движением может служить для того, чтобы управлять работой приводного механизма 140, такого как двигатель и/или тормоз, чтобы за счет этого выполнять управление движением на постоянной скорости, при котором рассматриваемое транспортное средство управляется таким образом, что оно движется на определенной скорости транспортного средства, которая задается водителем. Помимо этого или альтернативно, когда едущее впереди транспортное средство присутствует, функция управления движением может служить для того, чтобы управлять работой приводного механизма 140, такого как двигатель и/или тормоз, чтобы за счет этого выполнять управление движением в режиме "ехать за", в котором рассматриваемое транспортное средство управляется таким образом, что оно едет за едущим впереди транспортным средством с определенным расстоянием между транспортными средствами, которое задается водителем. Помимо этого, в настоящем варианте осуществления, функция управления движением может служить для того, чтобы управлять работой приводного механизма 140, такого как двигатель, тормозной актуатор и актуатор рулевого управления, чтобы за счет этого выполнять управление сменой полосы движения, в котором рассматриваемое транспортное средство управляется таким образом, что оно автоматически сменяет полосу движения. В настоящем варианте осуществления, функция управления движением служит для того, чтобы определять то, следует или нет выполнять управление сменой полосы движения, на основе результата определения, выполняемого посредством функции определения смены полосы движения в отношении того, является или нет возможной смена полосы движения.
[0039] Со ссылкой на фиг. 7, далее описывается процесс помощи при смене полосы движения согласно первому варианту осуществления. Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей процесс помощи при смене полосы движения согласно первому варианту осуществления. Процесс помощи при смене полосы движения, описанный ниже, выполняется посредством устройства 150 управления. Процесс помощи при смене полосы движения, описанный ниже, начинается, когда зажигание включается, и многократно выполняется до тех пор, пока не будет выключено зажигание.
[0040] На этапе S101, функция получения информации рассматриваемого транспортного средства устройства 150 управления в первую очередь служит для того, чтобы получать информацию рассматриваемого транспортного средства. Например, функция получения информации касательно транспортного средства может служить для того, чтобы получать позиционную информацию рассматриваемого транспортного средства в качестве информации рассматриваемого транспортного средства из GPS-устройства, включенного в набор 110 датчиков, и также может служить для того, чтобы получать информацию скорости транспортного средства для рассматриваемого транспортного средства в качестве информации рассматриваемого транспортного средства из датчика скорости транспортного средства, включенного в набор 110 датчиков.
[0041] На этапе S102, функция получения информации окружающих условий устройства 150 управления служит для того, чтобы получать информацию окружающих условий. Например, функция получения информации окружающих условий может служить для того, чтобы получать информацию дороги дорог рядом с рассматриваемым транспортным средством в качестве информации окружающих условий из картографической базы данных 120, либо также может получать информацию дороги дорог рядом с рассматриваемым транспортным средством и информацию относительно помех, присутствующих рядом с рассматриваемым транспортным средством, в качестве информации окружающих условий из камеры и/или датчика дальности, включенного в набор 110 датчиков.
[0042] На этапе S103, как проиллюстрировано на фиг. 2, функция определения смены полосы движения устройства 150 управления служит для того, чтобы вычислять запланированную траекторию движения, когда рассматриваемое транспортное средство сменяет полосу движения. В частности, в настоящем варианте осуществления, функция определения смены полосы движения служит для того, чтобы вычислять плавную запланированную траекторию движения в соответствии со скоростью транспортного средства для рассматриваемого транспортного средства V1 таким образом, что пассажиры рассматриваемого транспортного средства V1 не испытывают некомфортное ощущение и/или неудобство по мере того, как рассматриваемое транспортное средство V1 резко поворачивает.
[0043] На этапе S104, функция определения смены полосы движения устройства 150 управления служит для того, чтобы задавать целевую область R1 определения. В настоящем варианте осуществления, функция определения смены полосы движения служит для того, чтобы вычислять проезжаемое расстояние, требуемое для рассматриваемого транспортного средства V1, чтобы сменять полосу движения, на основе позиционной информации и информации скорости транспортного средства для рассматриваемого транспортного средства V1, полученной на этапе S101, и/или запланированной траектории движения, вычисленной на этапе S103. Затем, как проиллюстрировано на фиг. 3, функция определения смены полосы движения может служить для того, чтобы задавать конкретную область для области в рассматриваемой полосе движения в качестве целевой области R1 определения. Конкретная область представляет собой область, которая расположена впереди рассматриваемого транспортного средства V1, и задается от позиции рассматриваемого транспортного средства V1 до проезжаемого расстояния, требуемого для рассматриваемого транспортного средства V1, чтобы сменять полосу движения.
[0044] На этапе S105, функция определения смены полосы движения служит для того, чтобы задавать нерекомендованную область R2. В частности, как проиллюстрировано на фиг. 4, функция определения смены полосы движения может служить для того, чтобы задавать область, в которой смена полосы движения не рекомендуется, к примеру, область, в которой смена полосы движения запрещается посредством правил дорожного движения и т.п., в качестве нерекомендованной области R2 на основе информации дороги, полученной на этапе S102.
[0045] На этапе S106, функция определения смены полосы движения служит для того, чтобы задавать целевую область R3 смежной полосы движения. Например, функция определения смены полосы движения может служить для того, чтобы вычислять расстояние D1 между транспортными средствами в направлении вперед и расстояние D2 между транспортными средствами в направлении назад, которые представляют собой расстояния после смены полосы движения, и задавать конкретную область для области в смежной полосе движения в качестве целевой области R3 смежной полосы движения. Конкретная область представляет собой область, которая задается от позиции P2, отстоящей вперед от рассматриваемого транспортного средства на расстояние D1 между транспортными средствами в направлении вперед, до позиции P3, отстоящей назад от рассматриваемого транспортного средства на расстояние D2 между транспортными средствами в направлении назад.
[0046] На этапе S107, функция определения смены полосы движения служит для того, чтобы определять то, является или нет смена полосы движения возможной, на основе целевой области R1 определения, которая задается на этапе S104, и нерекомендованной области R2, которая задается на этапе S105. В частности, функция определения смены полосы движения служит для того, чтобы определять то, включает либо нет целевая область R1 определения в себя часть или всю нерекомендованную область R2. После этого, когда целевая область R1 определения включает в себя часть или всю нерекомендованную область R2, процесс переходит к этапу S108. На этапе S108, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство V1 не может сменять полосу движения. С другой стороны, когда на этапе S107 выполняется определение в отношении того, что целевая область R1 определения не включает в себя часть или всю нерекомендованную область R2, процесс переходит к этапу S109.
[0047] На этапе S109, функция определения смены полосы движения служит для того, чтобы определять то, присутствует или нет находящееся в смежной полосе движения транспортное средство в целевой области R3 смежной полосы движения. Когда выполняется определение в отношении того, что находящееся в смежной полосе движения транспортное средство не присутствует в целевой области R3 смежной полосы движения, процесс переходит к этапу S110. На этапе S110, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство может сменять полосу движения. С другой стороны, когда одно или более находящихся в смежной полосе движения транспортных средств присутствуют в целевой области R3 смежной полосы движения, процесс переходит к этапу S111.
[0048] На этапе S111, функция определения смены полосы движения служит для того, чтобы вычислять уровень CV2 близости едущего впереди транспортного средства, который представляет уровень близости едущего впереди в смежной полосе движения транспортного средства V2, приближающегося к рассматриваемому транспортному средству V1, и уровень CV3 близости едущего сзади транспортного средства, который представляет уровень близости едущего сзади в смежной полосе движения транспортного средства V3, приближающегося к рассматриваемому транспортному средству V1. Например, функция определения смены полосы движения может служить для того, чтобы вычислять уровень CV2 близости едущего впереди транспортного средства и уровень CV3 близости едущего сзади транспортного средства на основе вышеуказанных уравнений (1) и (2).
[0049] Затем на этапе S112, функция определения смены полосы движения служит для того, чтобы определять то, ниже или нет уровень CV2 близости едущего впереди транспортного средства и уровень CV3 близости едущего сзади транспортного средства, вычисленный на этапе S111, соответствующих предварительно определенных пороговых значений. Когда уровень CV2 близости едущего впереди транспортного средства или уровень CV3 близости едущего сзади транспортного средства не ниже соответствующего предварительно определенного порогового значения, процесс переходит к этапу S113. На этапе S113, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство V1 не может сменять полосу движения. С другой стороны, когда уровень CV2 близости едущего впереди транспортного средства и уровень CV3 близости едущего сзади транспортного средства ниже соответствующих предварительно определенных пороговых значений, процесс переходит к этапу S114. На этапе S114, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство V1 может сменять полосу движения.
[0050] На этапе S115, функция определения смены полосы движения служит для того, чтобы выводить результат определения для смены полосы движения, выполненного на этапе S108, S110, S113 или S114. Например, функция определения смены полосы движения может служить для того, чтобы выводить результат определения того, что смена полосы движения не может выполняться, в устройство 130 представления, чтобы за счет этого обеспечивать возможность устройству 130 представления уведомлять в отношении того, что смена полосы движения не может выполняться. Когда оборудование 100 управления движением выполняет управление сменой полосы движения, результат определения в отношении того, является или нет смена полосы движения возможной, может выводиться, чтобы за счет этого обеспечивать возможность оборудованию 100 управления движением надлежащим образом выполнять смену полосы движения рассматриваемого транспортного средства.
[0051] Как описано выше, в настоящем варианте осуществления, нерекомендованная область R2, в которой не рекомендуется смена полосы движения, идентифицируется на основе информации дороги дорог рядом с рассматриваемым транспортным средством V1, и целевая область R1 определения для определения того, может или нет рассматриваемое транспортное средство V1 сменять полосу движения, задается на основе позиционной информации и информации скорости транспортного средства для рассматриваемого транспортного средства V1. После этого, когда целевая область R1 определения включает в себя часть или всю нерекомендованную область R2, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 не может сменять полосу движения. Через эту операцию, в настоящем варианте осуществления, может выполняться определение в отношении того, что смена полосы движения не может выполняться, в области, в которой смена полосы движения не рекомендуется, к примеру, в области, в которой смена полосы движения запрещается посредством правил дорожного движения, и в силу этого может надлежащим образом выполняться определение в отношении того, что рассматриваемое транспортное средство V1 может сменять полосу движения.
[0052] Кроме того, в настоящем варианте осуществления, проезжаемое расстояние, требуемое для рассматриваемого транспортного средства, чтобы сменять полосу движения, оценивается на основе скорости транспортного средства для рассматриваемого транспортного средства, и область, которая включена в область в рассматриваемой полосе движения и соответствует проезжаемому расстоянию, требуемому для рассматриваемого транспортного средства, чтобы сменять полосу движения, задается в качестве целевой области R1 определения. Через эту операцию, в настоящем варианте осуществления, область, в которой рассматриваемое транспортное средство сменяет полосу движения, может надлежащим образом задаваться в качестве целевой области R1 определения. Как результат, может надлежащим образом выполняться определение в отношении того, может или нет рассматриваемое транспортное средство сменять полосу движения.
[0053] Кроме того, в настоящем варианте осуществления, когда целевая область R1 определения не включает в себя часть или всю нерекомендованную область R2, целевая область R3 смежной полосы движения задается в смежной полосе движения. Затем выполняется определение в отношении того, присутствует или нет находящееся в смежной полосе движения транспортное средство в целевой области R3 смежной полосы движения. Когда находящееся в смежной полосе движения транспортное средство не присутствует в целевой области R3 смежной полосы движения, выполняется определение в отношении того, что рассматриваемое транспортное средство может сменять полосу движения. С другой стороны, когда одно или более находящихся в смежной полосе движения транспортных средств присутствуют в целевой области R3 смежной полосы движения, уровень CV2 близости едущего впереди транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, приближающегося к рассматриваемому транспортному средству V1, и уровень CV3 близости едущего сзади транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3, приближающегося к рассматриваемому транспортному средству V1, вычисляются. После этого, когда уровень CV2 близости едущего впереди транспортного средства или уровень CV3 близости едущего сзади транспортного средства не ниже соответствующего предварительно определенного порогового значения, выполняется определение в отношении того, что рассматриваемое транспортное средство не может сменять полосу движения, в то время как, когда уровень CV2 близости едущего впереди транспортного средства и уровень CV3 близости едущего сзади транспортного средства ниже соответствующих предварительно определенных пороговых значений, выполняется определение в отношении того, что рассматриваемое транспортное средство может сменять полосу движения. Здесь, уровень CV2 близости едущего впереди транспортного средства может использоваться в качестве индекса степени, в которой водитель рассматриваемого транспортного средства V1 ощущает то, что едущее впереди в смежной полосе движения транспортное средство V2 приближается к рассматриваемому транспортному средству V1. Уровень CV3 близости едущего сзади транспортного средства может использоваться в качестве индекса степени, в которой водитель рассматриваемого транспортного средства V1 ощущает то, что едущее сзади в смежной полосе движения транспортное средство V3 приближается к рассматриваемому транспортному средству V1. Соответственно, когда уровень CV2 близости едущего впереди транспортного средства или уровень CV3 близости едущего сзади транспортного средства не ниже соответствующего предварительно определенного порогового значения, выполняется определение в отношении того, что рассматриваемое транспортное средство не может сменять полосу движения, и за счет этого можно эффективно предотвращать испытывание неудобства водителем рассматриваемого транспортного средства V1 вследствие едущего впереди в смежной полосе движения транспортного средства V2 или едущего сзади в смежной полосе движения транспортного средства V3, приближающегося к рассматриваемому транспортному средству V1, при смене полосы движения рассматриваемого транспортного средства V1.
[0054] Второй вариант осуществления
Далее описывается оборудование управления движением согласно второму варианту осуществления. Оборудование 100 управления движением согласно второму варианту осуществления имеет конфигурацию, идентичную конфигурации устройства 100 управления движением первого варианта осуществления, и является идентичным устройству в первом варианте осуществления за исключением того, что оборудование 100 управления движением работает так, как описано ниже.
[0055] Во втором варианте осуществления, функция определения смены полосы движения устройства 150 управления служит для того, чтобы оценивать скорость транспортного средства для рассматриваемого транспортного средства при движении по дороге, лежащей впереди рассматриваемого транспортного средства, на основе формы дороги для дороги, лежащей впереди рассматриваемого транспортного средства, и задавать целевую область R1 определения на основе оцененной скорости транспортного средства для рассматриваемого транспортного средства.
[0056] Фиг. 8 является набором схем для описания способа задания целевой области R1 определения согласно второму варианту осуществления. В примере, проиллюстрированном на фиг. 8, примерно иллюстрируется окружение, в котором рассматриваемое транспортное средство движется на прямой дороге со скоростью 60 км/ч и затем начинает движение по кривой. Например, в случае если целевая область R1 определения задается до того, как рассматриваемое транспортное средство начинает движение по кривой на основе скорости 60 км/ч, которая представляет собой скорость транспортного средства для рассматриваемого транспортного средства перед началом движения по кривой (т.е. скорость транспортного средства для рассматриваемого транспортного средства во время движения по прямой вперед), когда время, требуемое для смены полосы движения, составляет 3 секунды, как проиллюстрировано на фиг. 8(A), функция определения смены полосы движения может служить для того, чтобы задавать область от рассматриваемого транспортного средства V1 до расстояния в 50 м в качестве целевой области R1 определения.
[0057] Напротив, во втором варианте осуществления, до того, как рассматриваемое транспортное средство V1 начинает движение по кривой, функция определения смены полосы движения служит для того, чтобы оценивать скорость транспортного средства для рассматриваемого транспортного средства V1 при движении через кривую и задавать целевую область R1 определения на основе оцененной скорости транспортного средства для рассматриваемого транспортного средства V1. Например, в случае если оценивается то, что рассматриваемое транспортное средство V1 уменьшает свою скорость транспортного средства до 50 км/ч, чтобы начинать движение по кривой, когда время, требуемое для смены полосы движения, составляет 3 секунды, функция определения смены полосы движения может служить для того, чтобы задавать область от рассматриваемого транспортного средства V1 до расстояния в 42 м в качестве целевой области R1 определения. Способ оценки скорости транспортного средства для рассматриваемого транспортного средства на дороге, лежащей впереди рассматриваемого транспортного средства, не ограничен конкретным образом, и может использоваться любой известный способ.
[0058] Во втором варианте осуществления, при определении того, может или нет рассматриваемое транспортное средство сменять полосу движения, на основе целевой области R3 смежной полосы движения и находящихся в смежной полосе движения транспортных средств, функция определения смены полосы движения служит для того, чтобы вычислять уровень CV1 близости рассматриваемого транспортного средства для рассматриваемого транспортного средства V1, приближающегося к едущему сзади в смежной полосе движения транспортному средству V3, в дополнение к уровню CV2 близости едущего впереди транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, приближающегося к рассматриваемому транспортному средству V1, и уровню CV3 близости едущего сзади транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3, приближающегося к рассматриваемому транспортному средству V1.
[0059] В частности, функция определения смены полосы движения в первую очередь служит для того, чтобы вычислять время (THWV1) между транспортными средствами и допустимый запас (TTCV1) времени до столкновения для едущего сзади в смежной полосе движения транспортного средства V3 относительно рассматриваемого транспортного средства V1. Время (THWV1) между транспортными средствами для едущего сзади в смежной полосе движения транспортного средства V3 относительно рассматриваемого транспортного средства V1 может получаться посредством деления относительного расстояния между рассматриваемым транспортным средством V1 и едущим сзади в смежной полосе движения транспортным средством V3 на скорость транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3. Допустимый запас (TTCV1) времени до столкновения для едущего сзади в смежной полосе движения транспортного средства V3 относительно рассматриваемого транспортного средства V1 может получаться посредством деления относительного расстояния между рассматриваемым транспортным средством V1 и едущим сзади в смежной полосе движения транспортным средством V3 на разность между скоростью транспортного средства для рассматриваемого транспортного средства V1 и скоростью транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3. Затем функция определения смены полосы движения служит для того, чтобы вычислять уровень CV1 близости рассматриваемого транспортного средства для рассматриваемого транспортного средства V1, приближающегося к едущему сзади в смежной полосе движения транспортному средству V3, на основе времени (THWV1) между транспортными средствами и допустимого запаса (TTCV1) времени до столкновения для едущего сзади в смежной полосе движения транспортного средства V3, как представлено посредством следующего уравнения (3).
Уровень близости рассматриваемого транспортного средства CV1=1/THWV1+4/TTCV1... (3)
[0060] Затем во втором варианте осуществления, когда уровень CV2 близости едущего впереди транспортного средства и уровень CV3 близости едущего сзади транспортного средства ниже соответствующих предварительно определенных пороговых значений, функция определения смены полосы движения служит для того, чтобы определять то, ниже или нет уровень CV1 близости рассматриваемого транспортного средства для рассматриваемого транспортного средства V1, приближающегося к едущему сзади в смежной полосе движения транспортному средству V3, предварительно определенного порогового значения. Когда уровень CV1 близости рассматриваемого транспортного средства не ниже предварительно определенного порогового значения, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство V1 не может сменять полосу движения, в то время как, когда уровень CV1 близости рассматриваемого транспортного средства ниже предварительно определенного порогового значения, функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство V1 может сменять полосу движения. Пороговое значение уровня CV1 близости рассматриваемого транспортного средства не ограничено конкретным образом и может надлежащим образом задаваться. Пороговое значение уровня CV1 близости рассматриваемого транспортного средства может быть значением, отличающимся от порогового значения уровня CV2 близости едущего впереди транспортного средства или порогового значения уровня CV3 близости едущего сзади транспортного средства, либо также может быть значением, идентичным пороговому значению уровня CV2 близости едущего впереди транспортного средства или пороговому значению уровня CV3 близости едущего сзади транспортного средства.
[0061] Со ссылкой на фиг. 9, далее описывается процесс помощи при смене полосы движения согласно второму варианту осуществления. Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процесс помощи при смене полосы движения согласно второму варианту осуществления. Аналогично первому варианту осуществления, процесс помощи при смене полосы движения согласно второму варианту осуществления начинается, когда зажигание включается, и многократно выполняется до тех пор, пока не будет выключено зажигание.
[0062] На этапах S101-S103, аналогично первому варианту осуществления, информация рассматриваемого транспортного средства и информация окружающих условий получаются (этапы S101 и S102), и запланированная траектория движения, когда рассматриваемое транспортное средство сменяет полосу движения, вычисляется (этап S103). После этапа S103 выполняется этап S201, на котором функция определения смены полосы движения устройства 150 управления служит для того, чтобы оценивать скорость транспортного средства для рассматриваемого транспортного средства при движении по дороге, лежащей впереди рассматриваемого транспортного средства, на основе формы дороги для дороги, лежащей впереди рассматриваемого транспортного средства. Форма дороги для дороги, лежащей впереди рассматриваемого транспортного средства, включена в информацию окружающих условий, полученную на этапе S102. Затем на этапе S202, функция определения смены полосы движения служит для того, чтобы задавать целевую область R1 определения на основе скорости транспортного средства, оцененной на этапе S201, для рассматриваемого транспортного средства на дороге, лежащей впереди рассматриваемого транспортного средства. Через эту операцию, как проиллюстрировано на фиг. 8(B), например, когда рассматриваемое транспортное средство V1 должно встречаться с кривой впереди рассматриваемого транспортного средства V1, целевая область R1 определения может вычисляться на основе скорости транспортного средства для рассматриваемого транспортного средства V1 при движении через кривую.
[0063] На этапах S105-S112, процесс выполняется аналогично первому варианту осуществления. Таким образом, после того, как нерекомендованная область R2 и целевая область R3 смежной полосы движения задаются (этапы S105 и S106), выполняется определение в отношении того, включает или нет целевая область R1 определения, заданная на этапе S202, в себя часть или всю нерекомендованную область R2 (этап S107). После этого, когда целевая область R1 определения включает в себя часть или всю нерекомендованную область R2, выполняется определение в отношении того, что рассматриваемое транспортное средство не может сменять полосу движения (этап S108), в то время как, когда выполняется определение в отношении того, что целевая область R1 определения не включает в себя часть или всю нерекомендованную область R2, выполняется определение в отношении того, присутствует или нет находящееся в смежной полосе движения транспортное средство в целевой области R3 смежной полосы движения (этап S109). Когда находящееся в смежной полосе движения транспортное средство не присутствует в целевой области R3 смежной полосы движения, выполняется определение в отношении того, что рассматриваемое транспортное средство может сменять полосу движения (этап S110). С другой стороны, когда одно или более находящихся в смежной полосе движения транспортных средств присутствуют в целевой области R3 смежной полосы движения, уровень CV2 близости едущего впереди транспортного средства и уровень CV3 близости едущего сзади транспортного средства вычисляются (этап S111), и выполняется определение в отношении того, ниже или нет уровень CV2 близости едущего впереди транспортного средства и уровень CV3 близости едущего сзади транспортного средства соответствующих предварительно определенных пороговых значений (этап S112). Когда уровень CV2 близости едущего впереди транспортного средства или уровень CV3 близости едущего сзади транспортного средства не ниже соответствующего предварительно определенного порогового значения, выполняется определение в отношении того, что рассматриваемое транспортное средство не может сменять полосу движения (этап S113). С другой стороны, когда уровень CV2 близости едущего впереди транспортного средства и уровень CV3 близости едущего сзади транспортного средства ниже соответствующих предварительно определенных пороговых значений, процесс переходит к этапу S203.
[0064] На этапе S203, функция определения смены полосы движения служит для того, чтобы вычислять уровень близости рассматриваемого транспортного средства V1, приближающегося к едущему сзади в смежной полосе движения транспортному средству V3, в качестве уровня CV1 близости рассматриваемого транспортного средства. Например, функция определения смены полосы движения может служить для того, чтобы вычислять уровень CV1 близости рассматриваемого транспортного средства для рассматриваемого транспортного средства V1, приближающегося к едущему сзади в смежной полосе движения транспортному средству V3, на основе времени (THWV1) между транспортными средствами для едущего сзади в смежной полосе движения транспортного средства V3 относительно рассматриваемого транспортного средства V1, и допустимого запаса (TTCV1) времени до столкновения для едущего сзади в смежной полосе движения транспортного средства V3 относительно рассматриваемого транспортного средства V1, как представлено посредством вышеуказанного уравнения (3).
[0065] Затем на этапе S204, функция определения смены полосы движения служит для того, чтобы определять то, ниже или нет уровень CV1 близости рассматриваемого транспортного средства, вычисленный на этапе S203, предварительно определенного порогового значения. Когда уровень CV1 близости рассматриваемого транспортного средства ниже предварительно определенного порогового значения, процесс переходит к этапу S114, на котором функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство V1 может сменять полосу движения. Когда уровень CV1 близости рассматриваемого транспортного средства не ниже предварительно определенного порогового значения, процесс переходит к этапу S113, на котором функция определения смены полосы движения служит для того, чтобы определять то, что рассматриваемое транспортное средство V1 не может сменять полосу движения.
[0066] Как описано выше, во втором варианте осуществления, скорость транспортного средства для рассматриваемого транспортного средства при движении по дороге, лежащей впереди рассматриваемого транспортного средства, оценивается на основе формы дороги для дороги, лежащей впереди рассматриваемого транспортного средства, и целевая область R1 определения задается на основе оцененной скорости транспортного средства. Через эту операцию, во втором варианте осуществления, определение в отношении того, может или нет рассматриваемое транспортное средство V1 сменять полосу движения, может надлежащим образом выполняться на основе формы дороги для дороги, когда рассматриваемое транспортное средство V1 сменяет полосу движения.
[0067] Кроме того, во втором варианте осуществления, в дополнение к уровню CV2 близости едущего впереди транспортного средства и уровню CV3 близости едущего сзади транспортного средства, уровень CV1 близости рассматриваемого транспортного средства для рассматриваемого транспортного средства V1, приближающегося к едущему сзади в смежной полосе движения транспортному средству V3, вычисляются. Затем в дополнение к определению в отношении того, ниже или нет уровень CV2 близости едущего впереди транспортного средства и уровень CV3 близости едущего сзади транспортного средства соответствующих предварительно определенных пороговых значений, выполняется определение в отношении того, ниже или нет уровень CV1 близости рассматриваемого транспортного средства предварительно определенного порогового значения. Когда уровень CV1 близости рассматриваемого транспортного средства ниже предварительно определенного порогового значения, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 может сменять полосу движения, в то время как, когда уровень CV1 близости рассматриваемого транспортного средства не ниже предварительно определенного порогового значения, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 не может сменять полосу движения. Здесь, уровень CV1 близости рассматриваемого транспортного средства может использоваться в качестве индекса степени, в которой водитель едущего сзади в смежной полосе движения транспортного средства V3 ощущает то, что рассматриваемое транспортное средство V1 приближается к едущему сзади в смежной полосе движения транспортному средству V3. Соответственно, когда уровень CV1 близости рассматриваемого транспортного средства является высоким, водитель едущего сзади в смежной полосе движения транспортного средства V3, может ощущать то, что рассматриваемое транспортное средство V1 приближается к едущему сзади в смежной полосе движения транспортному средству V3, и водитель едущего сзади в смежной полосе движения транспортного средства V3 может возможно нарушать поток трафика смежной полосы движения, к примеру, посредством нажатия на тормоз. Следовательно, во втором варианте осуществления, когда уровень CV1 близости рассматриваемого транспортного средства не ниже предварительно определенного порогового значения, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 не может сменять полосу движения, и за счет этого можно эффективно предотвращать нарушение потока трафика смежной полосы движения водителем едущего сзади в смежной полосе движения транспортного средства V3, к примеру, посредством нажатия на тормоз.
[0068] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0069] Например, в вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой нерекомендованная область R2 задается на основе информации дороги, сохраненной в картографической базе данных 120, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация. Например, тестовая информация может собираться из множества транспортных средств, или информация об авариях множества транспортных средств может предварительно сохраняться в базе данных. Эта информация может анализироваться, чтобы предварительно сохранять область, в которой смена полосы движения не рекомендуется, в качестве нерекомендованной области R2 в базе данных. Это обеспечивает возможность устройству 150 управления получать нерекомендованную область R2 рядом с рассматриваемым транспортным средством из вышеуказанной базы данных.
[0070] В вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой когда целевая область R1 определения включает в себя часть или всю нерекомендованную область R2, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 не может сменять полосу движения, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, рамка, окружающая целевую область R1 определения, задается в качестве целевой рамки определения, рамка, окружающая нерекомендованную область R2, задается в качестве нерекомендованной рамки, и когда целевая рамка определения и нерекомендованная рамка создают помехи друг другу, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 не может сменять полосу движения. В этом случае, может использоваться модифицированная конфигурация, в которой когда целевая рамка определения и нерекомендованная рамка не создают помехи друг другу, рамка, окружающая целевую область R3 смежной полосы движения, задается в качестве целевой рамки смежной полосы движения, и выполняется определение в отношении того, может или нет рассматриваемое транспортное средство V1 сменять полосу движения, на основе находящегося в смежной полосе движения транспортного средства, присутствующего в целевой рамке смежной полосы движения.
[0071] В вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой расстояние D1 между транспортными средствами в направлении вперед и расстояние D2 между транспортными средствами в направлении назад вычисляются, чтобы задавать целевую область R3 смежной полосы движения на основе времени (THW) между транспортными средствами и допустимого запаса (TTC) времени до столкновения, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, функция определения смены полосы движения служит для того, чтобы предварительно определять расстояние D1 между транспортными средствами в направлении вперед и расстояние D2 между транспортными средствами в направлении назад для каждой скорости транспортного средства и задавать целевую область R3 смежной полосы движения на основе расстояния D1 между транспортными средствами в направлении вперед и расстояния D2 между транспортными средствами в направлении назад, соответствующего скорости транспортного средства для рассматриваемого транспортного средства. Помимо этого или альтернативно, функция определения смены полосы движения может быть выполнена с возможностью определять расстояние D1 между транспортными средствами в направлении вперед и расстояние D2 между транспортными средствами в направлении назад на основе едущего впереди в смежной полосе движения транспортного средства V2 и едущего сзади в смежной полосе движения транспортного средства V3, которые движутся на расстояниях, ближайших к рассматриваемому транспортному средству V1. Например, функция определения смены полосы движения может быть выполнена с возможностью увеличивать расстояние D1 между транспортными средствами в направлении вперед или расстояние D2 между транспортными средствами в направлении назад по мере того, как размер едущего впереди в смежной полосе движения транспортного средства V2 или едущего сзади в смежной полосе движения транспортного средства V3 больше. Помимо этого или альтернативно, функция определения смены полосы движения может быть выполнена с возможностью увеличивать расстояние D1 между транспортными средствами в направлении вперед или расстояние D2 между транспортными средствами в направлении назад по мере того, как едущее впереди в смежной полосе движения транспортное средство V2 или едущее сзади в смежной полосе движения транспортное средство V3 находится ближе к рассматриваемому транспортному средству, либо по мере того, как скорость транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2 является более низкой, или скорость транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3 является более высокой. Помимо этого или альтернативно, функция определения смены полосы движения может быть выполнена с возможностью задавать длину целевой области R3 смежной полосы движения на основе формы дороги для дороги, лежащей впереди рассматриваемого транспортного средства V1, как и в случае целевой области R1 определения во втором варианте осуществления.
[0072] В вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой скорость транспортного средства для общего транспортного средства в смежной полосе движения получается в качестве скорости транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3, чтобы за счет этого вычислять расстояние между транспортными средствами в направлении назад на основе времени (THW) между транспортными средствами, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, абсолютная скорость транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3 вычисляется, и расстояние между транспортными средствами в направлении назад на основе времени (THW) между транспортными средствами вычисляется на основе абсолютной скорости транспортного средства для едущего сзади в смежной полосе движения транспортного средства V3.
[0073] Устройство 150 управления согласно вышеописанным вариантам осуществления соответствует контроллеру в настоящем изобретении.
Описание номеров ссылок
[0074] 100 - оборудование управления движением
110 - набор датчиков
120 - картографическая база данных
130 - устройство представления
140 - приводной механизм
150 - устройство управления
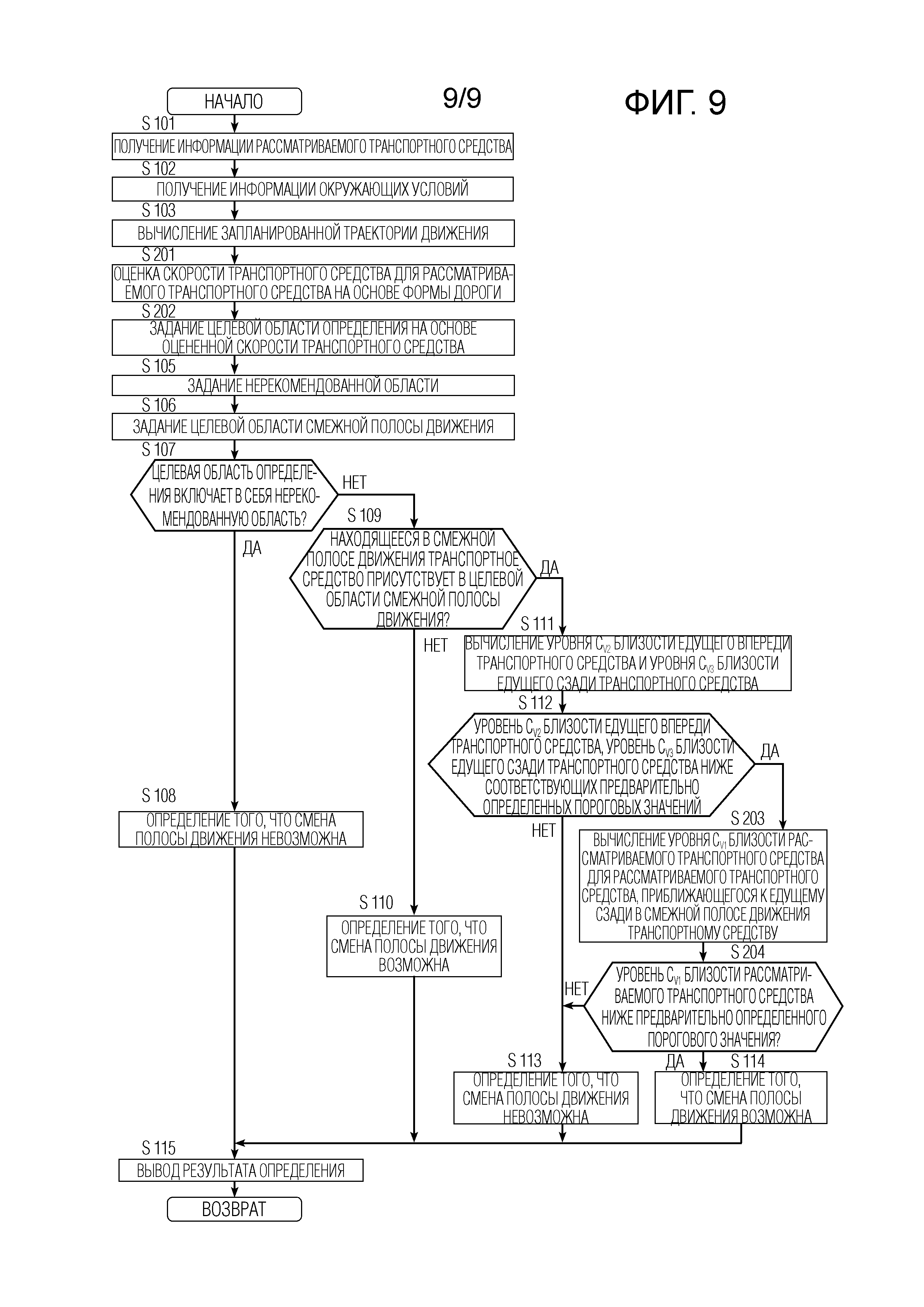
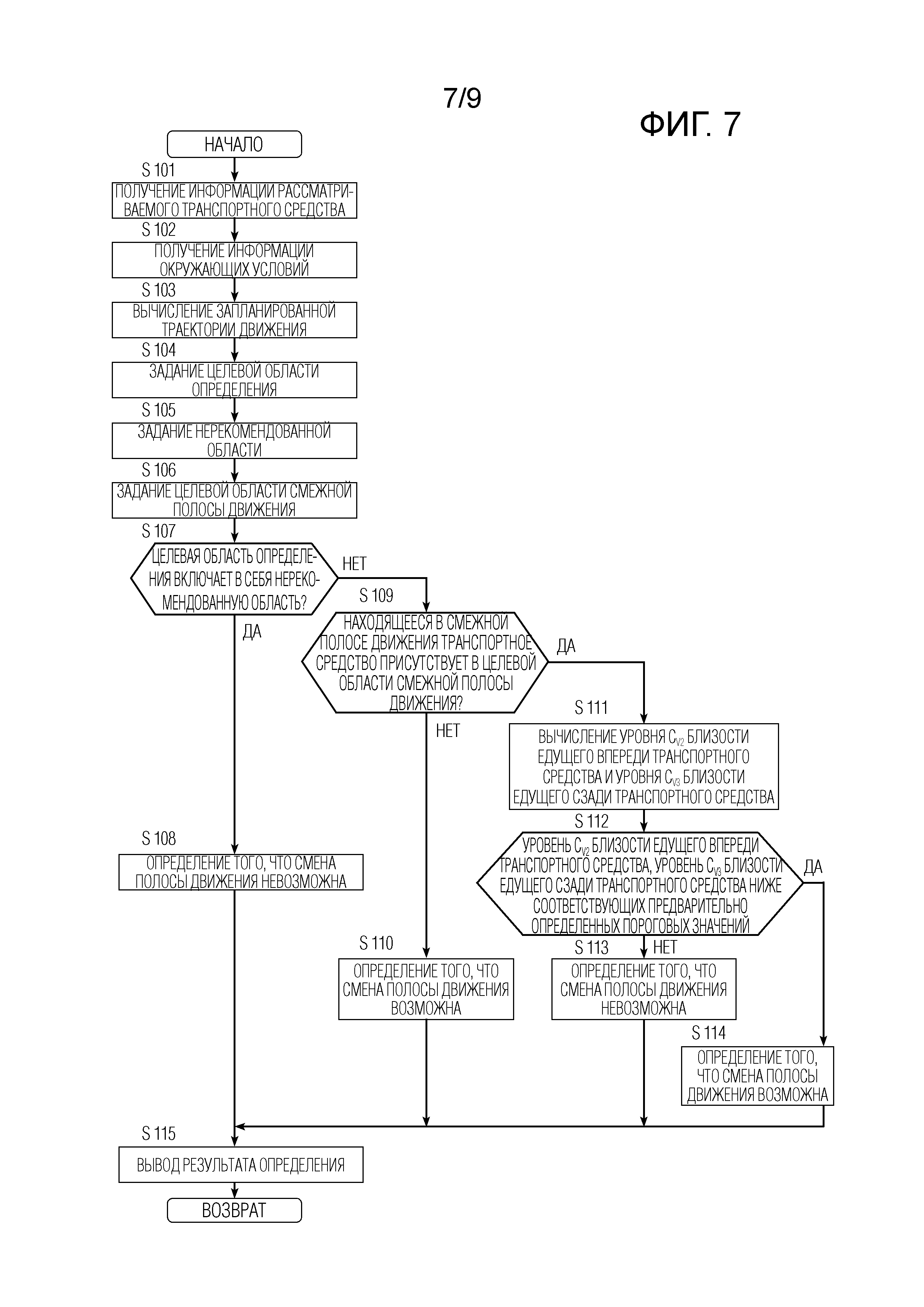
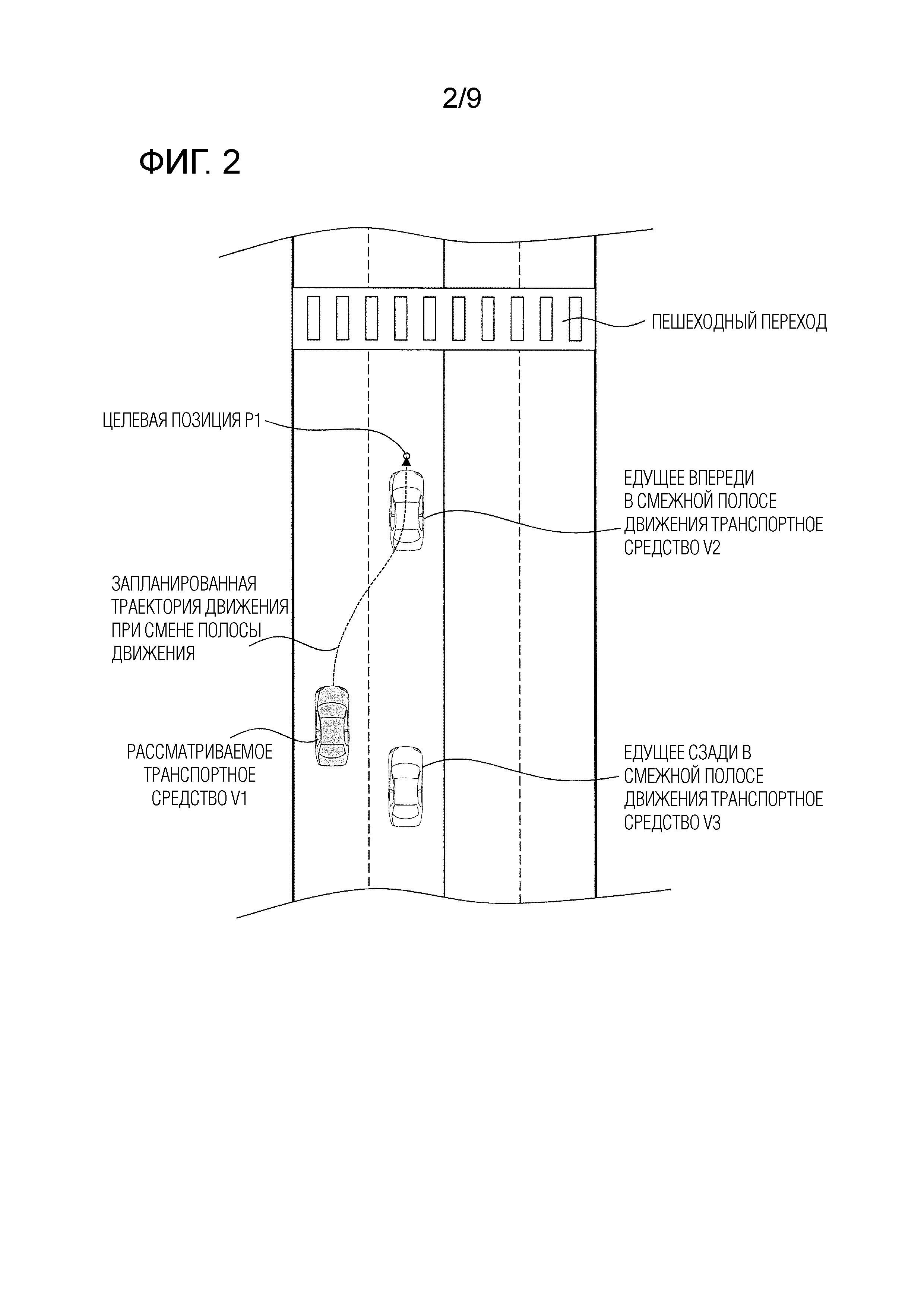
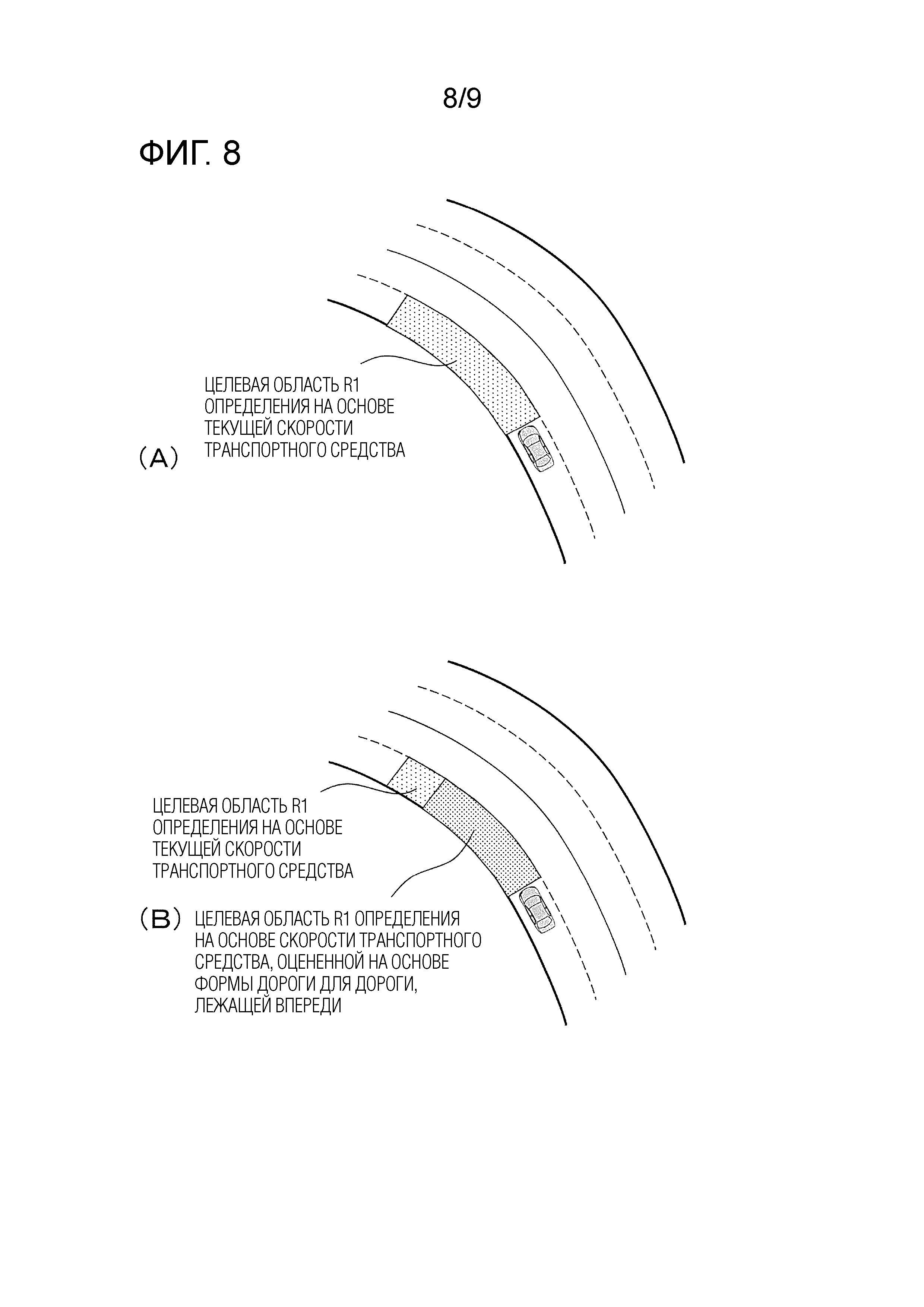
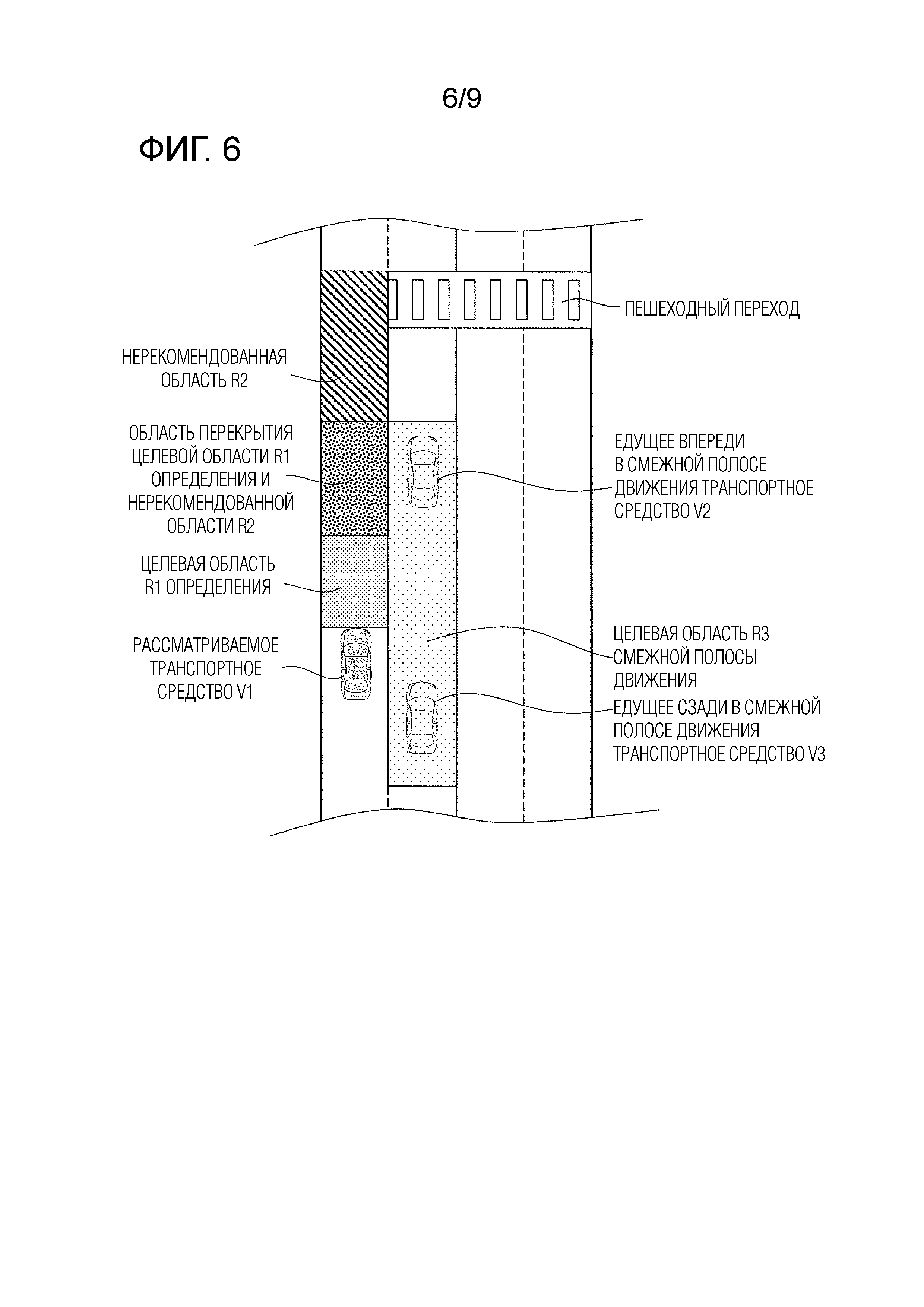
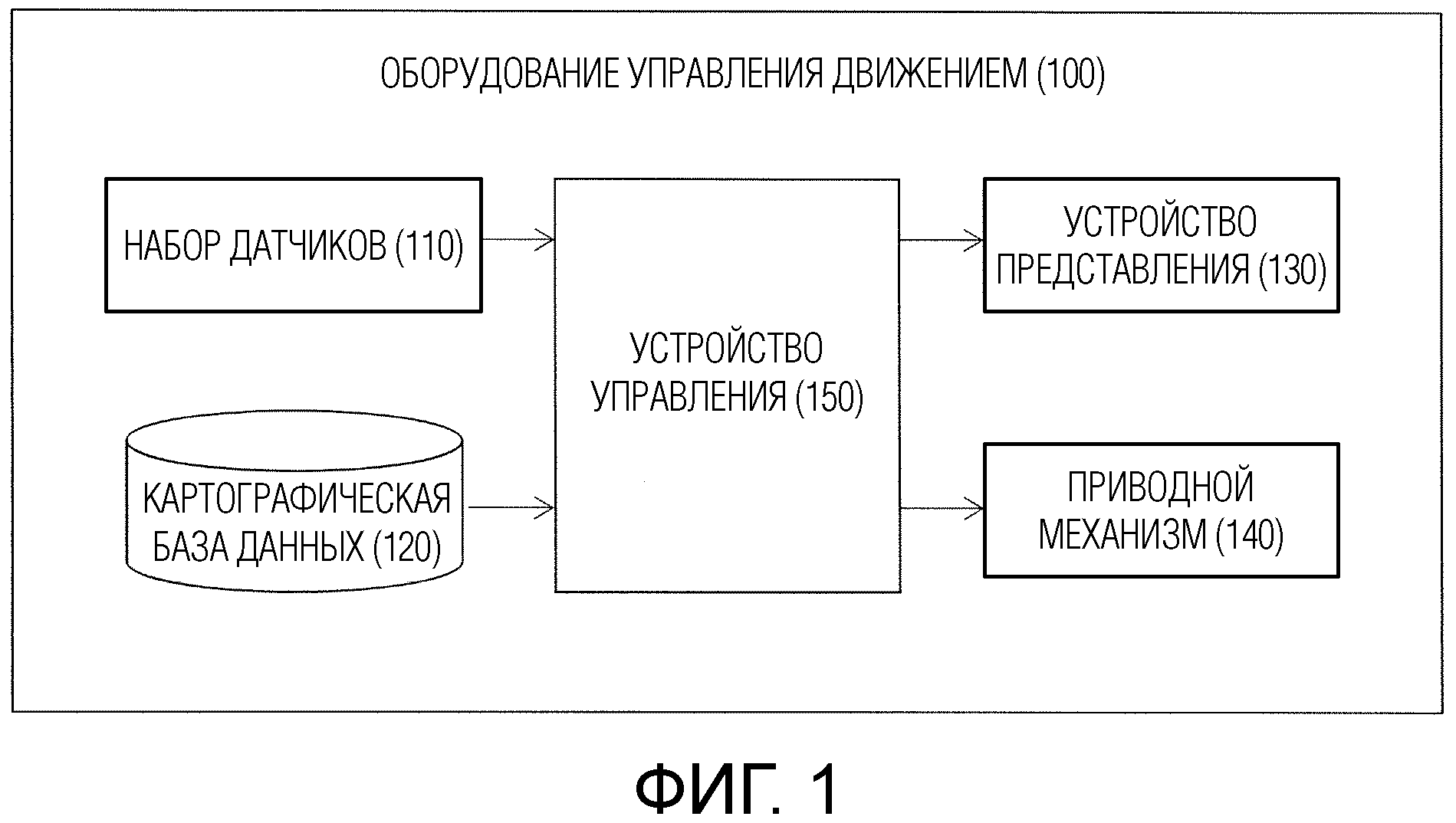
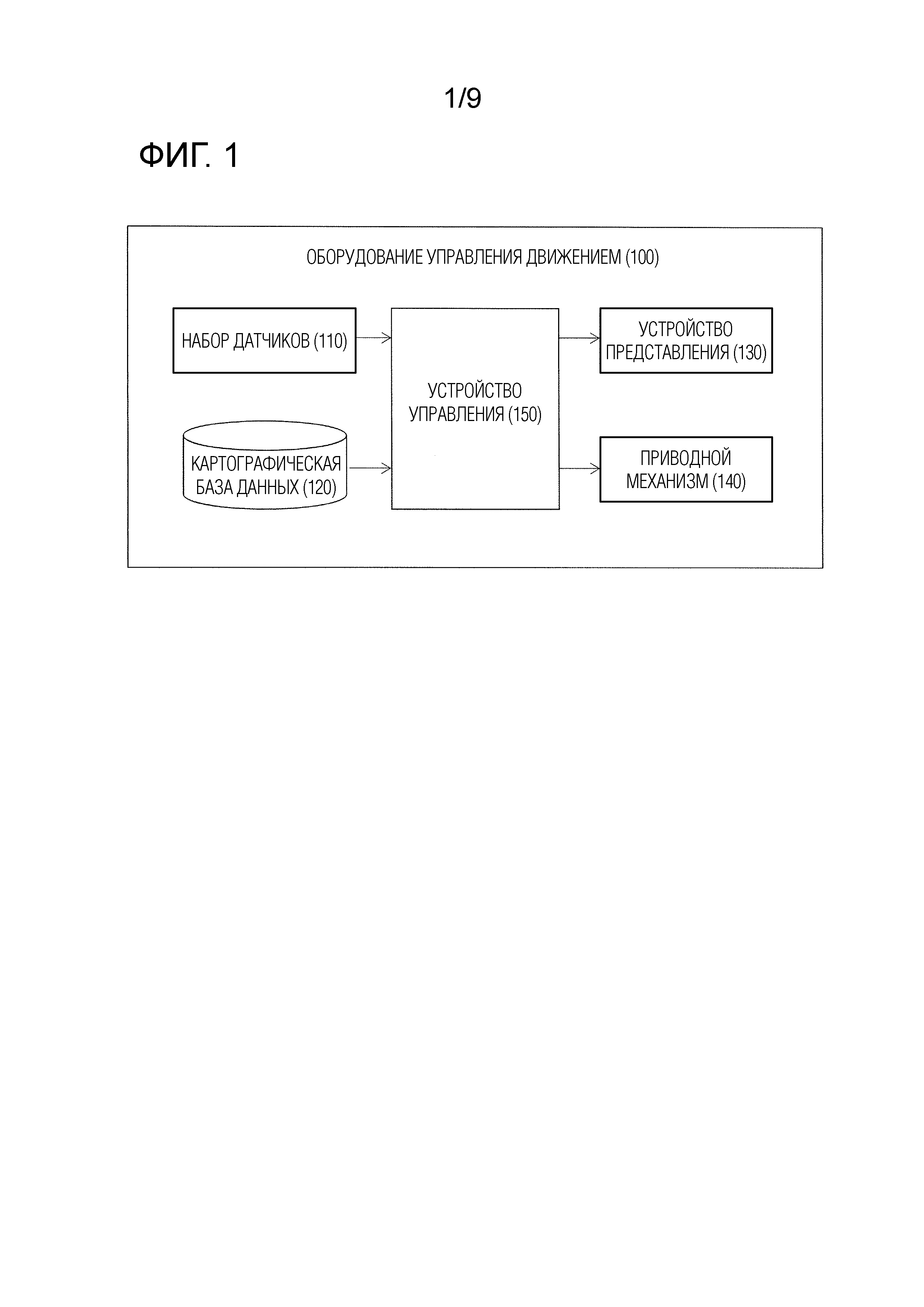
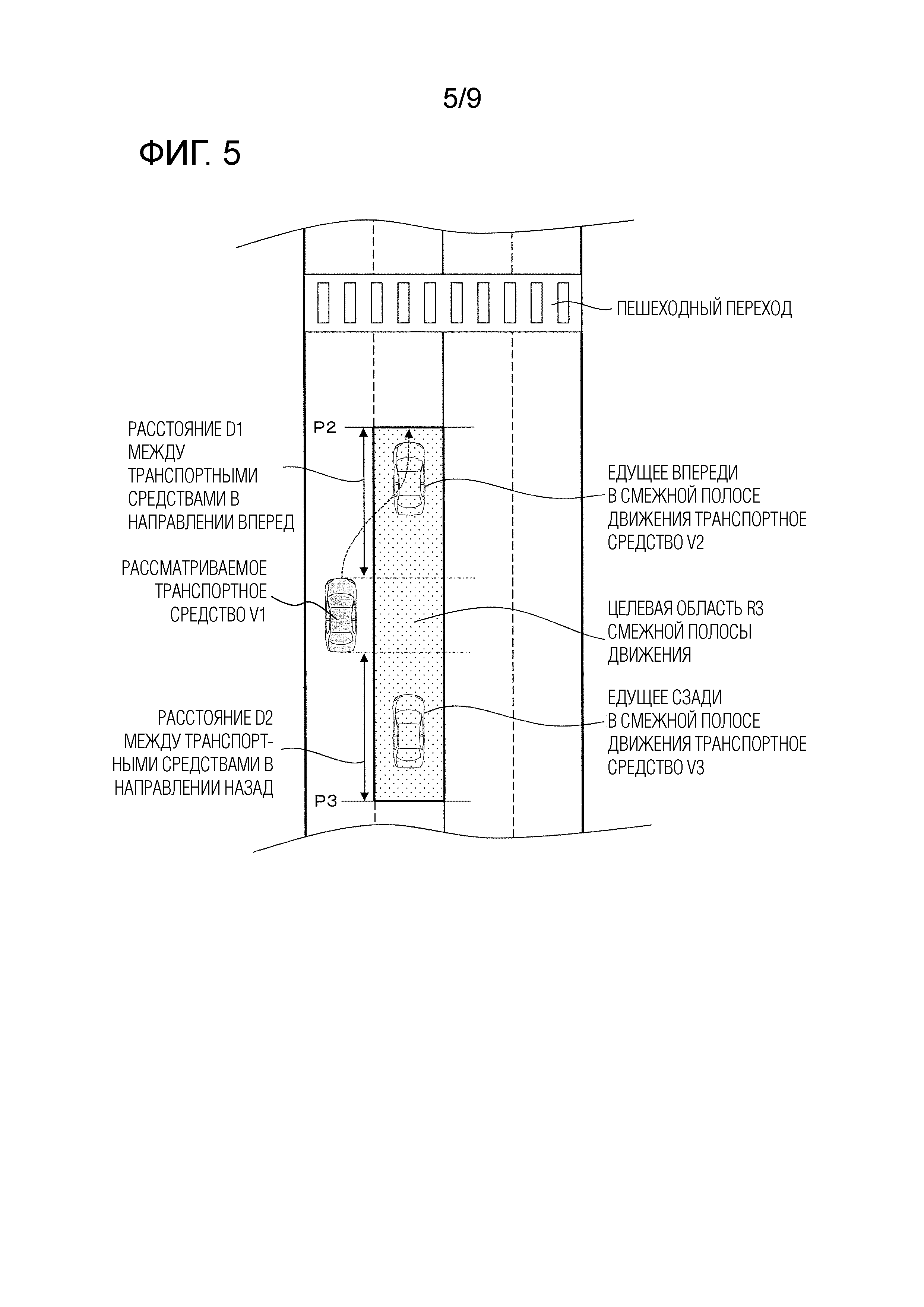
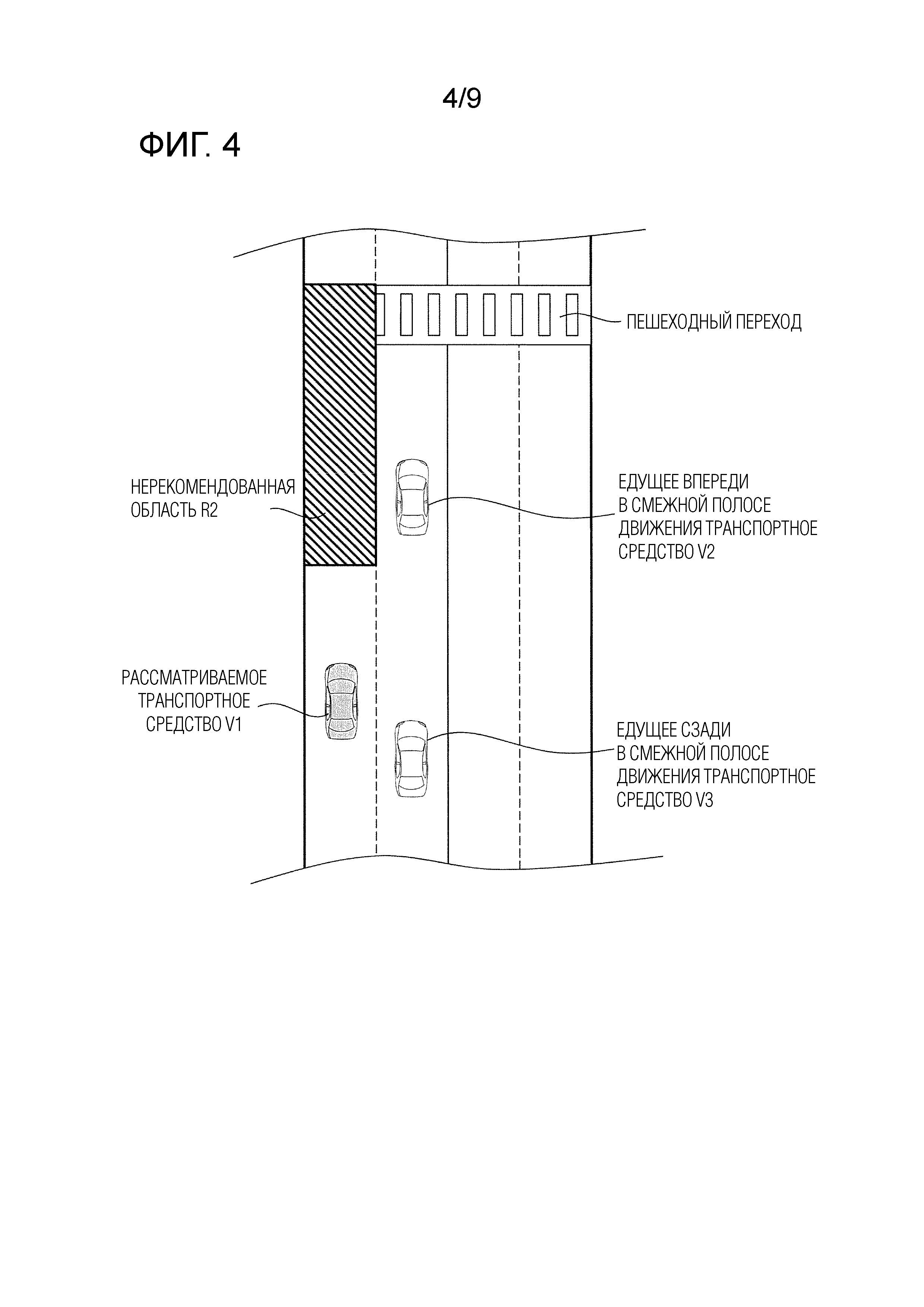
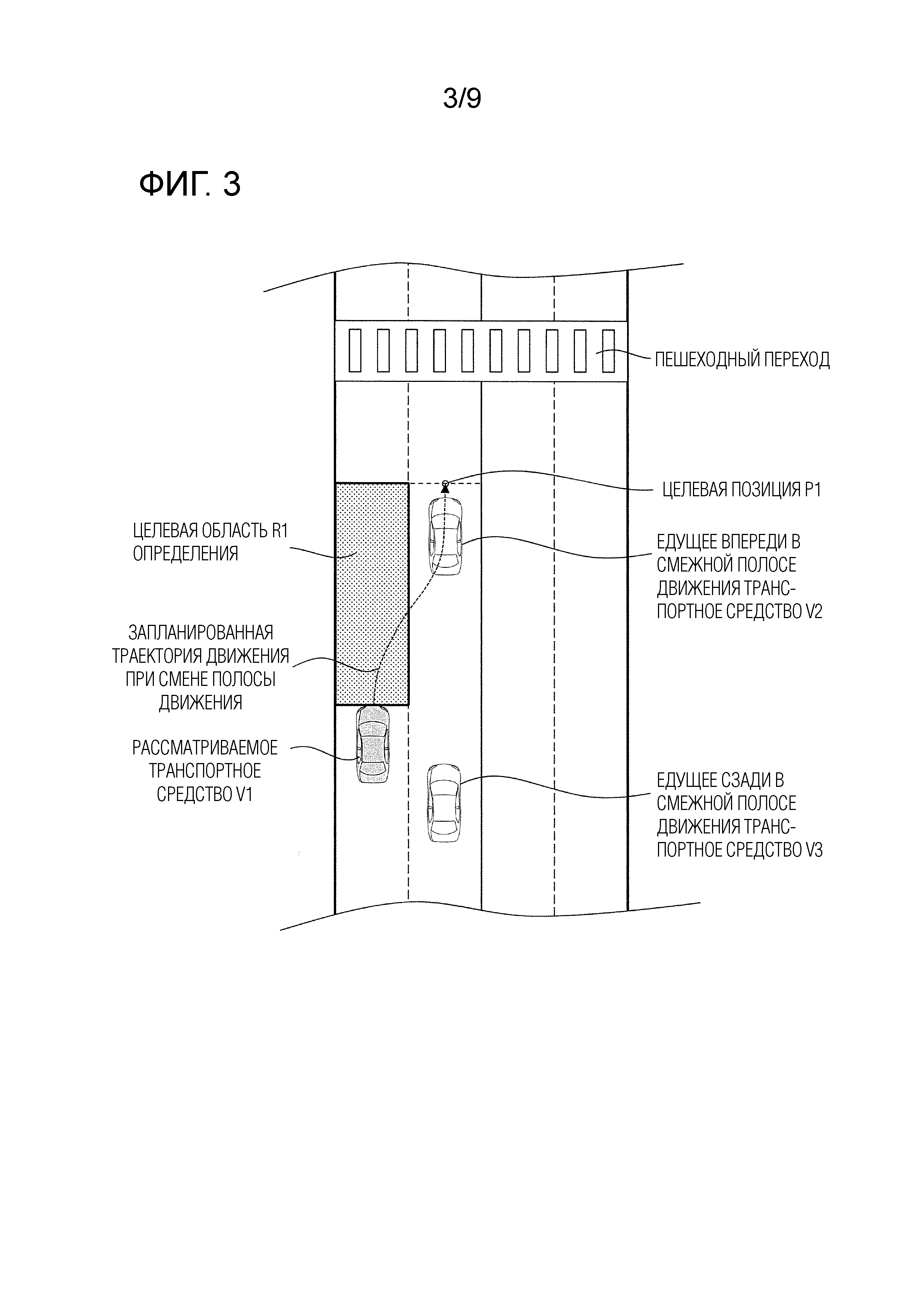
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ управления движением и устройство управления движением
Устройство определения окружения, аппаратура содействия при движении и способ определения окружения
Устройство планирования вождения, аппаратура содействия при движении и способ планирования вождения
Устройство определения окружения, аппаратура содействия при движении и способ определения окружения
Способ и устройство помощи при вождении
Способ и устройство помощи при вождении
Способ управления вождением и устройство управления вождением
Способ и устройство коррекции картографических данных
Способ управления вождением и устройство управления вождением
Способ управления движением транспортного средства и устройство управления движением транспортного средства

