Результат интеллектуальной деятельности: СПОСОБ КАЛИБРОВКИ ЭНКОДЕРОВ РЫЧАЖНОЙ СИСТЕМЫ ЭКЗОСКЕЛЕТА
Вид РИД
Изобретение
Изобретение относится к робототехнике и может быть использовано при калибровке энкодеров рычажных систем экзоскелетов.
Известен способ калибровки и определения смещения углового энкодера относительно ротора электромотора, защищенный патентом US 9641108 B2, кл. H02P 6/16, G01R 23/00, 2017 г., заключающийся в том, что ротор электромотора устанавливают в известное положение путем возбуждения его обмоток, считывают показания энкодера в данном положении, вычисляют калибровочную поправку как разность между показаниями энкодера и фактическим углом поворота ротора, записывают калибровочную поправку в память электронного энкодера.
Существенными признаками аналога, совпадающими с признаками заявляемого изобретения, являются вычисление калибровочной поправки и запись калибровочной поправки в память электронного энкодера.
Недостатком данного способа является необходимость применения специализированного оборудования для установки оси, контролируемой калибруемым энкодером, в положение с заранее известным углом поворота.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ калибровки угловых энкодеров роботизированных манипуляторов, защищенный патентом US 9427872 B1, МПК B25J 9/00, B25J 9/16, G01D 5/26, G01D 5/244, 2016 г., заключающийся в том, что сегмент манипулятора, положение которого контролируется энкодером, с помощью привода (актуатора) сначала устанавливают в одно из граничных положений, затем с известным шагом изменяют его фактический угол и считывают соответствующие показания энкодера, вычисляют калибровочную поправку, записывают калибровочную поправку в память электронного энкодера.
Существенными признаками прототипа, совпадающими с признаками заявляемого изобретения, являются вычисление калибровочной поправки и запись калибровочной поправки в память электронного энкодера.
Недостатком данного способа является необходимость установки сегмента манипулятора в ряд положений с заранее известными углами поворота, что требует наличия приводов, подключаемых к рычажной системе манипулятора, или специализированного оборудования.
Техническим результатом изобретения является уменьшение количества и сложности оборудования, необходимого для калибровки энкодеров рычажной системы экзоскелета, не имеющего приводов.
Для достижения технического результата в способе калибровки энкодеров, включающем вычисление калибровочной поправки и запись калибровочной поправки в память электронного энкодера, для вычисления калибровочной поправки дополнительно фиксируют основание экзоскелета на стенде, расположенном рядом с операционным столом,  раз выполняют измерения, включающие приведение рычажной системы экзоскелета в произвольное положение на операционном столе, запись показаний
раз выполняют измерения, включающие приведение рычажной системы экзоскелета в произвольное положение на операционном столе, запись показаний  -го энкодера
-го энкодера  ,
,  , где
, где  - количество энкодеров,
- количество энкодеров,  - номер измерения, измерение декартовых координат узловых точек рычажной системы экзоскелета, вычисление фактических углов поворота
- номер измерения, измерение декартовых координат узловых точек рычажной системы экзоскелета, вычисление фактических углов поворота  энкодеров в кинематических парах рычажной системы экзоскелета путем решения обратной задачи кинематики на основе декартовых координат узловых точек рычажной системы экзоскелета, для каждого -го энкодера находят свободный член
энкодеров в кинематических парах рычажной системы экзоскелета путем решения обратной задачи кинематики на основе декартовых координат узловых точек рычажной системы экзоскелета, для каждого -го энкодера находят свободный член  линейной зависимости показаний энкодеров
линейной зависимости показаний энкодеров  от фактических углов поворота
от фактических углов поворота  :
:

методом наименьших квадратов на основе пар  записанных показаний энкодеров и фактических углов поворота
записанных показаний энкодеров и фактических углов поворота  , принимают калибровочную поправку равной свободному члену .
, принимают калибровочную поправку равной свободному члену .
Теоретическое доказательство наличия причинно-следственной связи между заявляемыми признаками и достигаемым техническим результатом заключается в следующем.
Для измерения углов поворота в рычажной системе экзоскелета могут применяться энкодеры. При использовании экзоскелета для захвата движений человека необходимо соответствие начал отсчета углов поворота в энкодерах и начал отсчета углов поворота в используемой кинематической модели рычажной системы экзоскелета. Данное соответствие может быть достигнуто путем прецизионного монтажа энкодеров. Более простым способом является монтаж энкодеров с произвольной ориентацией начала отсчета угла поворота и их последующая калибровка. Обозначим углы поворота относительно начал отсчета кинематической модели рычажной системы экзоскелета как фактические. Задачей калибровки является определение показаний энкодеров, соответствующих нулевым значениям фактических углов поворота и запись этой калибровочной поправки в память электронных энкодеров.
Калибровочная поправка может быть определена как разность между показаниями энкодера и фактическими углами поворота. Для этого можно привести рычажную систему экзоскелета в положение с известными фактическими углами поворота, как это сделано в прототипе, либо измерить фактические углы поворота с помощью приборов прямого измерения. Использование обоих вариантов затруднено сложной конструкцией рычажной системы экзоскелета и отсутствием приводов, поэтому требует применения сложного специализированного оборудования.
До калибровки показания энкодеров и фактические углы поворота отличаются на постоянную величину, равную калибровочной поправке. Для ее определения в заявляемом способе для каждого энкодера предлагается определить коэффициенты линейного уравнения, описывающего зависимость между показаниями энкодеров и фактическими углами. Для этого рычажная система экзоскелета приводится в несколько различных положений. В каждом положении записываются показания энкодеров и декартовы координаты узловых точек рычажной системы экзоскелета. На основе декартовых координат узловых точек рычажной системы экзоскелета вычисляются фактические углы поворота в кинематических парах рычажной системы экзоскелета. Для каждого -го энкодера по полученным парам показаний энкодеров и фактических углов поворота определяется свободный член линейного уравнения зависимости вида:
где - показания энкодера,
- фактические углы,
- свободный член.
Значение свободного члена может быть определено с помощью метода наименьших квадратов. Значение является искомой калибровочной поправкой. После записи калибровочной поправки в память электронного энкодера, показания энкодера совпадают со значением фактических углов поворота.
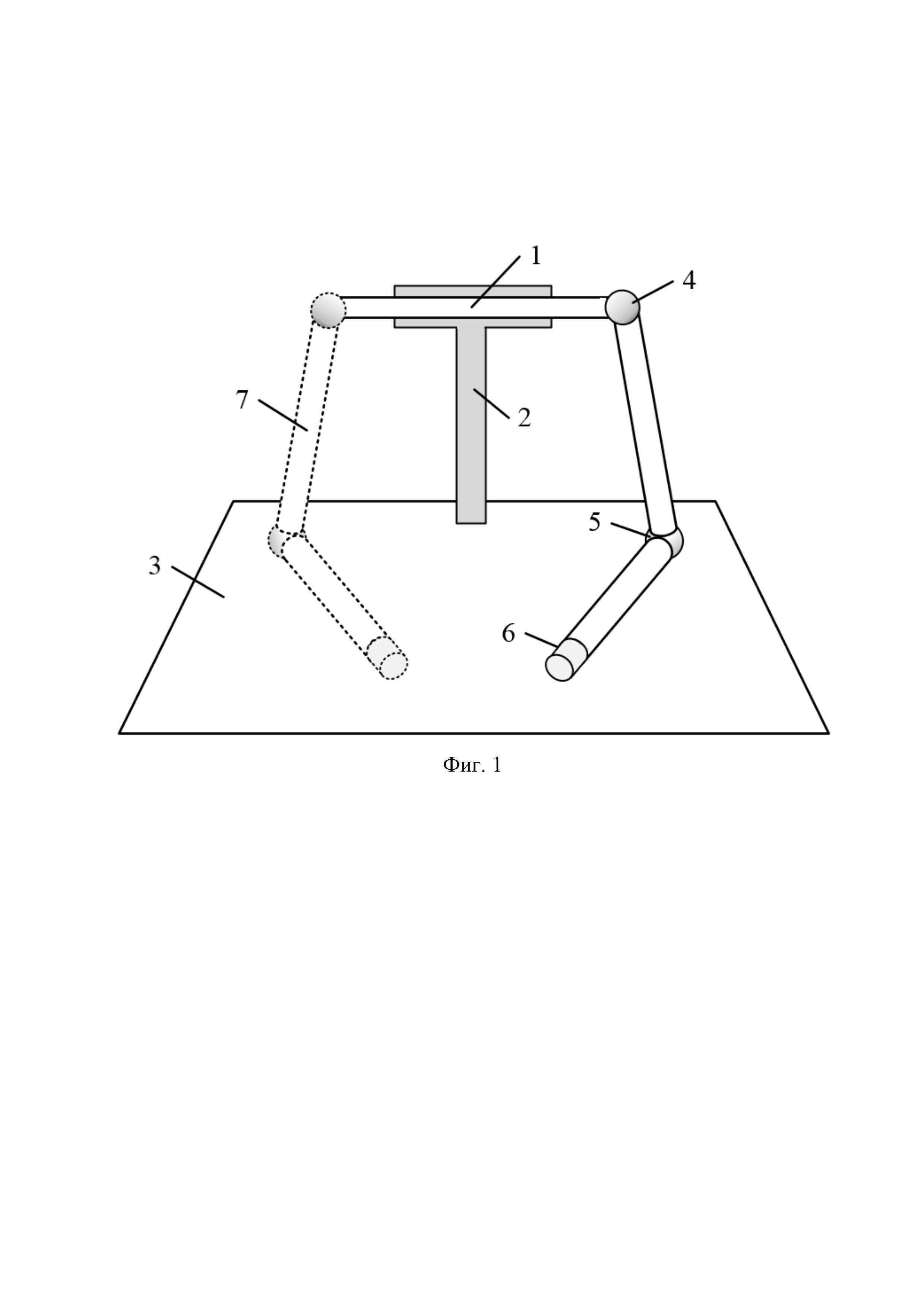
Предлагаемый способ калибровки энкодеров рычажной системы экзоскелета (фиг. 1) заключается в том, что основание 1 экзоскелета фиксируют на стенде 2, расположенном рядом с операционным столом 3. Далее задают количество проводимых измерений . Затем для  повторяют следующую последовательность действий:
повторяют следующую последовательность действий:
1. Локтевое сочленение 5 и рабочее окончание 6 экзоскелета располагают в произвольных точках операционного стола.
2. Записывают соответствующие -му положению экзоскелета показания энкодеров  ,
,  , где - число калибруемых энкодеров.
, где - число калибруемых энкодеров.
3. Измеряют декартовы координаты узловых точек рычажной системы экзоскелета.
4. Рассчитывают фактические углы поворота  сочленений экзоскелета в -м положении на основе известных длин звеньев экзоскелета, декартовых координат рабочего окончания, локтевого и плечевого сочленений путем решения обратной задачи кинематики.
сочленений экзоскелета в -м положении на основе известных длин звеньев экзоскелета, декартовых координат рабочего окончания, локтевого и плечевого сочленений путем решения обратной задачи кинематики.
Для каждого -го энкодера находят свободный член линейной зависимости показаний энкодера от фактического угла поворота на основе рассчитанных значений фактических углов поворота  и соответствующих им показаний энкодера
и соответствующих им показаний энкодера  методом наименьших квадратов. Пример определения значения по набору значений
методом наименьших квадратов. Пример определения значения по набору значений  и
и  для одного энкодера представлен на фиг. 2. Значение является искомой калибровочной поправкой. Вычисленную калибровочную поправку записывают в память электронного энкодера.
для одного энкодера представлен на фиг. 2. Значение является искомой калибровочной поправкой. Вычисленную калибровочную поправку записывают в память электронного энкодера.
Калибровку энкодеров рычажной системы второй «руки» 7 экзоскелета выполняют аналогично.
Таким образом, заявляемое изобретение не требует оборудования для приведения рычажной системы экзоскелета в положение с известными фактическими углами и оборудования для прямого измерения углов. Фактически углы поворота кинематических пар, в которых установлены калибруемые энкодеры, определяются косвенно на основе известных длин звеньев рычажной системы экзоскелета и декартовых координат ее узловых точек.
На фиг. 1 приведено расположение основания 1 экзоскелета, стенда 2 для фиксации экзоскелета, операционного стола 3, плечевого сочленения 4, локтевого сочленения 5, рабочего окончания 6 и второй «руки» 7 экзоскелета.
На фиг. 2 приведена визуализация примера калибровки для энкодера, измеряющего ротацию плечевого звена рычажной системы экзоскелета. По оси абсцисс откладывается фактический угол поворота . По оси ординат откладываются показания энкодера . На координатной плоскости отложены точки  ,
,  , соответствующие результатам косвенного измерения фактических углов и показаниям энкодера . Также приведен график уравнения зависимости между показаниями энкодера и фактическим углом .
, соответствующие результатам косвенного измерения фактических углов и показаниям энкодера . Также приведен график уравнения зависимости между показаниями энкодера и фактическим углом .
В соответствии с предлагаемым способом осуществляют следующие действия над экзоскелетом, стендом, операционным столом и другими материальными объектами (фиг. 1):
1. Фиксируют основание 1 экзоскелета на стенде 2, расположенном рядом с операционным столом 3.
2. Выбирают количество проводимых измерений . Затем для повторяют следующую последовательность действий:
2.1. Перемещают рычажную систему экзоскелета в произвольное -е положение, путем перемещения локтевого сочленения 5 и рабочего окончания 6 экзоскелета в произвольные точки операционного стола.
2.2. Записывают соответствующие -му положению экзоскелета показания энкодеров , , где - число калибруемых энкодеров.
2.3. Измеряют декартовы координаты узловых точек рычажной системы экзоскелета.
2.4. Определяют углы поворота путем решения обратной задачи кинематики в  -м положении манипулятора на основе известных длин звеньев экзоскелета, декартовых координат рабочего окончания и центров сочленений.
-м положении манипулятора на основе известных длин звеньев экзоскелета, декартовых координат рабочего окончания и центров сочленений.
3. Для каждого -го энкодера:
3.1. Находят свободный член линейной зависимости показаний энкодера от фактических углов поворота на методом наименьших квадратов. Пример определения значения по набору значений и для одного энкодера представлен на фиг. 2.
3.2. Записывают коэффициент как калибровочную поправку в память электронного энкодера.
Один из вариантов осуществления изобретения для экзоскелета, описанного в дистанционном манипуляторе, защищенном патентом RU №125508, кл. B25J 3/04, 2013 г., заключается в следующем.
Экзоскелет фиксируют на жесткой раме, закрепленной на операционном столе (фиг. 2).
В соответствие с заявляемым способом семь раз перемещают одну «руку» экзоскелета в произвольное положение на операционном столе.
Для каждого положения с помощью системы управления экзоскелетом получают показания энкодеров и записывают их.
С помощью средств прямого измерения на основе известных конструктивных параметров стенда и стола определяют декартовы координаты центров локтевого и лучезапястного сочленений, центра схвата относительно центра плечевого сочленения «руки» экзоскелета.
Фактические углы поворота в кинематических парах рычажной системы экзоскелета вычисляют путем решения обратной задачи кинематики с помощью решения, предложенного в работе [Petrenko, V.I. Calculating rotation angles of the operator's arms based on generalized coordinates of the master device with following anthropomorphic manipulator in real time / V.I. Petrenko, F.B. Tebueva, V.B. Sychkov, V.O. Antonov, M.M. Gurchinsky // International Journal of Mechanical Engineering and Technology (IJMET). - 2018. - Vol. 9, Issue 7 (2018). - pp. 447-461].
С помощью метода наименьших квадратов находят значения для каждого энкодера.
Найденные коэффициенты записывают в память электронных энкодеров с помощью системы управления экзоскелетом.
Для упрощения процесса вычислений может использоваться ЭВМ. Процедура калибровки может быть автоматизирована путем реализации программного модуля калибровки в составе системы управления экзоскелетом.
Пример калибровочных данных, полученных с помощью заявляемого способа для энкодера, измеряющего ротацию плечевого звена рычажной системы экзоскелета, приведен на фиг. 2.

Арифметико-логическое устройство для умножения чисел по модулю
Устройство обнаружения и коррекции ошибки модулярного кода
Моюще-дезинфицирующее средство для предприятий молочной промышленности
Клапан-отсекатель
Способ использования солнечной энергии для систем кондиционирования воздуха
Способ получения полисахаридсодержащих полимерных матриц
Способ низкотемпературной плазмоактивированной гетероэпитаксии наноразмерных пленок нитридов металлов третьей группы таблицы д.и. менделеева
Способ периодического сбора цифровых данных в распределительных измерительных системах через низкоскоростные каналы связи с высоким уровнем помех
Вычислительное устройство
Теплогенерирующая установка
Способ копирующего управления манипуляторами антропоморфного робота
Комплекс динамического управления антропоморфным манипулятором
Многоразрядный параллельный сумматор по модулю с последовательным переносом
Комплекс копирующего управления манипуляторами антропоморфного робота
Вычислительное устройство
Вычислительное устройство
Конвейерный умножитель по модулю
Конвейерный вычислитель

