Результат интеллектуальной деятельности: Способ определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, и устройство для определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории
Вид РИД
Изобретение
Изобретение относится к области гидрографии, в частности к способам и техническим средствам определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, и может быть использовано для тарирования и калибровки многолучевого эхолота на акватории съемки.
В известных способах определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории (см., например, Правила гидрографической службы №4. Съемка рельефа дна (ПГС №4.). - Л: Издание ГУНиО МО СССР, 1984 г.) [1]), на гидрологических станциях должно осуществляться измерение температуры, солености и гидростатического давления воды или скорости распространения звука в воде специальным измерителем для определения поправки за отклонение действительной скорости звука в воде от расчетной и за рефракцию акустических лучей многолучевого эхолота.
Кроме того, необходимо определять группу инструментальных поправок к измеренным многолучевым эхолотом наклонных расстояний до дна, определение которых производят путем сравнения значений глубин, измеренных центральным и боковыми лучами многолучевого эхолота в идентичных точках в зоне полос обследования пересекающихся галсов (см. Дадашев А.А. Тарирование многолучевого эхолота на пересекающихся галсах. //. Записки по гидрографии. - 2000, - №251. С. 42-46 [2]).
Поправки за отклонения действительной скорости звука в воде от расчетной, поправки за рефракцию, поправки за отклонение частоты вращения электродвигателя от номинальной, поправки за место нуля многолучевого эхолота, поправки за углубление приемоизлучающей антенны, поправки за наклон дна должны определяться не менее двух раз в сутки (в начале и в конце съемки), с целью исключения пространственной и временной их изменчивости (см. Н.Д. Коломийчук. Гидрография. Л: Издание Главного управления навигации и океанографии при Министерстве обороны СССР, 1988 г. [3]).
Определение данных частных поправок для глубин, измеренных многолучевым эхолотом на акватории съемки, как показывает опыт, является весьма сложным и трудоемким процессом и характеризуется недостаточно высокой точностью [3].
Как показывают результаты проведенного патентного поиска в настоящее время у нас и за рубежом имеются способы и тарирующие устройства только лишь для однолучевых эхолотов и отсутствуют для многолучевых эхолотов.
Известен способ определения поправок к глубинам, измеренных однолучевым эхолотом при съемке рельефа дна акватории наиболее близкий технической сущности с заявленным способом тарирования многолучевого эхолота (см. патент RU №2292062 от 20.01.2007 «Способ определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, и устройство для его осуществления» [4]), включающий погружение до заданного горизонта или до дна в заданном месте (местах) акватории, а затем подъем до поверхности акватории расположенных на нижнем конце вертикально удерживаемой базы излучающей и приемной антенн однолучевого эхолота, датчики гидростатического давления и температуры, при этом при погружении и подъеме одновременно с излучением гидроакустического сигнала и измерением расстояния до поверхности воды дополнительно синхронно измеряют гидростатическое давление и температуру на верхнем и нижних концах базы, фиксируют исправленные температурной поправкой величины гидростатического давления, начиная с момента погружения и заканчивая моментом всплытия верхнего конца базы, а истинные значения поправок глубин  определяют расчетным путем по следующим формульным зависимостям:
определяют расчетным путем по следующим формульным зависимостям:
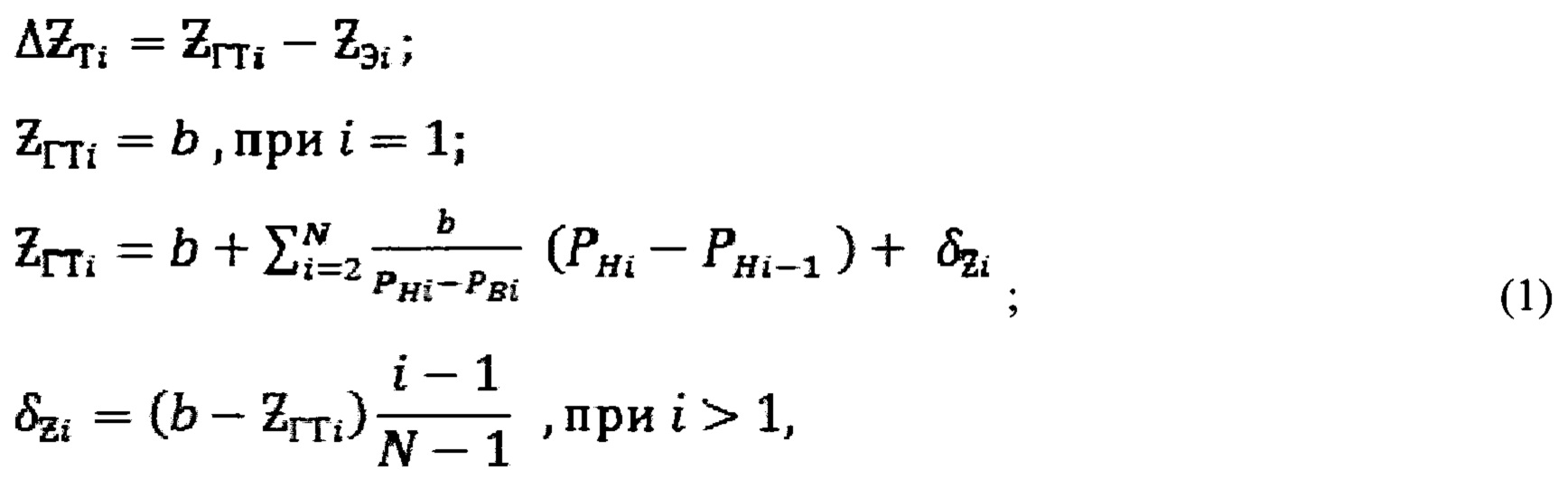
где i (i=1, 2, …, N) номер посылки излучающего вибратора, начиная с момента погружения в воду верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме на поверхность акватории;
 - истинная глубина горизонта тарирования (погружения приемного вибратора), определенная путем измерения гидростатического давления на концах вертикально удерживаемой базы;
- истинная глубина горизонта тарирования (погружения приемного вибратора), определенная путем измерения гидростатического давления на концах вертикально удерживаемой базы;
 - расстояние до поверхности воды - глубина горизонта тарирования, измеренная гидроакустическим способом;
- расстояние до поверхности воды - глубина горизонта тарирования, измеренная гидроакустическим способом;
b - длина вертикальной базы;
PHi, PBi - гидростатические давления, измеренные при i-ом излучении вибратора эхолота датчиками гидростатического давления свойственно на нижнем и верхнем концах базы и исправленные поправкой за измеренную датчиками температуру воды на глубине положения гидростатических датчиков;
PHi и PHi-1 - гидростатические давления, измеренные соответственно при i-й и i-1-й - излучениях вибратором эхолота и исправленные поправкой за измеренную температуру воды на глубине положения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме на поверхность акватории;
 - поправка глубины i тарирования (погружения приемного вибратора) в случае образования невязки
- поправка глубины i тарирования (погружения приемного вибратора) в случае образования невязки  при достижении верхним концом базы поверхности воды.
при достижении верхним концом базы поверхности воды.
Известно так же тарирующее устройство эхолота [4], наиболее близкое по технической сущности с заявленным тарирующим устройством многолучевого эхолота, содержащее передатчик и измерительный приемный блок, подключенные соответственно к излучающей и приемной антеннам, регистратор, блок управления, соединенный с измерительным приемным блоком, базу с положительной и отрицательной плавучестью, закрепленной в кардановом подвесе с возможностью спуска на заданный горизонт тарирования и подъема до поверхности воды в вертикальном положении, на верхнем конце которой закреплены воспринимающие контакты реле, исполняющие контакты которого соединены с блоком управления совместно с излучающей и приемной антеннами, а также датчиками гидростатического давления и температуры на нижнем конце базы и датчиками гидростатического давления и температуры на верхнем конце базы, выходы которых через блок управления соединены с входом блока определения поправок к глубинам, излучающие и приемные антенны расположены с возможностью излучения гидроакустического сигнала до поверхности акватории по вертикали и приема отраженного от нее сигнала, блоком определения поправок к глубинам, измеренным однолучевым эхолотом, вход которого через блок управления соединен с выходом измерительного приемного блока, а выход с входом регистратора.
Недостатком известных способа и устройства определения поправок к глубинам, измеренных однолучевым эхолотом при съемке рельефа дна акватории, является то, что при их использовании процесс определения данных поправок сложен и трудоемок.
Это обусловлено тем, что на акватории съемки определение данных поправок необходимо калибровать датчиком измерения гидростатического давления и температуры воды с целью определения цены деления измерительных шкал данных датчиков и определения ухода их нулей отсчета в течении определенного времени. Для чего необходимо иметь на судне, производящем съемку, метрологическую лабораторию со сложной и дорогостоящей метрологической аппаратурой (см. Белобров А.П. Гидрографические работы. Издание Гидрографического управления, - 1984 г. [5]). В процессе погружения и всплытия датчиков гидростатического давления и температуры воды необходимо выполнять сложное действие - обеспечивать синхронность их измерения гидростатического давления и температуры воды на концах вертикально удерживаемой базы. Для чего известное устройство снабжено четырехканальным измерительным приемным блоком и специальным блоком управления.
Кроме того, известные способ и устройство [4] не обеспечивают определения геодезических координат глубины погружения приемоизлучающих гидроакустических антенн эхолота, а следовательно, не обеспечивают создания на акватории съемки опорных гидрографических пунктов для калибровки эхолотов на акватории съемки, также как и известные аналогичные устройства (патенты RU №2292062 С2, 20.01.2007 [6], RU №2340916 С1, 10.12.2008 [7], RU №2326408 С1, 10.06.2008 [8], JP №10325871 А, 08.12.1998 [9], JP №4372890 А, 25.12.1992 [10]).
Задачей заявленного изобретения является существенное упрощение процесса определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, и определения геодезических координат глубины погружения приемоизлучающей антенны многолучевого эхолота в процессе определения данных поправок, а следовательно, обеспечения создания на акватории съемки рельефа дна опорных гидрографических пунктов для калибровки многолучевого эхолота на акватории съемки с целью обеспечения единства измерений.
Поставленная задача достигается тем, что в заявляемом способе определения поправок к глубинам, включающем погружение до заданного горизонта или до поверхности дна в заданном месте (местах) акватории, а затем подъем до поверхности воды акватории приемоизлучающей гидроакустической антенны многолучевого эхолота, закрепленной на нижнем конце вертикально удерживаемой базы заданной длины, с возможностью излучения данной антенной гидроакустических сигналов до поверхности воды акватории по центральному лучу по вертикали и по наклонным лучам по заданным направлениям; закрепленных там же морской интегрированной малогабаритной навигационной системы (МИМНС) и датчика измерения скорости распространения звука в воде, а на верхнем конце базы закреплена антенна приемника спутниковой радионавигационной системы; определение данным приемником в моменты погружения и всплытия верхнего конца базы геодезические координаты XП, XП и YB, YB соответственно, длину базы "b" принимают за искомую опорную глубину, фиксируют в моменты погружения и всплытия верхнего конца базы глубины погружения  и всплытия
и всплытия  приемоизлучающей гидроакустической антенны многолучевого эхолота, определение по ее центральному лучу гидроакустическим методом, принимая их за начальную
приемоизлучающей гидроакустической антенны многолучевого эхолота, определение по ее центральному лучу гидроакустическим методом, принимая их за начальную  и конечную
и конечную  глубину соответственно, определение в процессе погружения и всплытия забортной части заявленного устройства МИМНС текущих счислимых геодезических координат Xcri, Ycri мест погружаемой данной антенны, ее крена αi и азимута Ai активной ее части, измеренные датчиком скорости распространения звука в воде, текущих значений скорости распространения звука в воде ϑi, а так же определения текущих значений глубин погружения данной антенной гидроакустическим методом по центральному лучу
глубину соответственно, определение в процессе погружения и всплытия забортной части заявленного устройства МИМНС текущих счислимых геодезических координат Xcri, Ycri мест погружаемой данной антенны, ее крена αi и азимута Ai активной ее части, измеренные датчиком скорости распространения звука в воде, текущих значений скорости распространения звука в воде ϑi, а так же определения текущих значений глубин погружения данной антенной гидроакустическим методом по центральному лучу  и по каждому наклонному "j" лучу
и по каждому наклонному "j" лучу  по полученным данным определяют расчетным путем искомые значения поправок
по полученным данным определяют расчетным путем искомые значения поправок  к глубинам
к глубинам  измеренным многолучевым эхолотом при съемке рельефа дна акватории соответственно, искомые значения глубин
измеренным многолучевым эхолотом при съемке рельефа дна акватории соответственно, искомые значения глубин  и искомые значения геодезических координат
и искомые значения геодезических координат  в месте отражения гидроакустического сигнала от поверхности воды акватории по центральному лучу и искомые глубины до "i" горизонта, на котором находится данная антенна, и их искомые геодезические координаты в местах отражения гидроакустических сигналов, излученных по "j" наклонным лучам от поверхности воды акватории
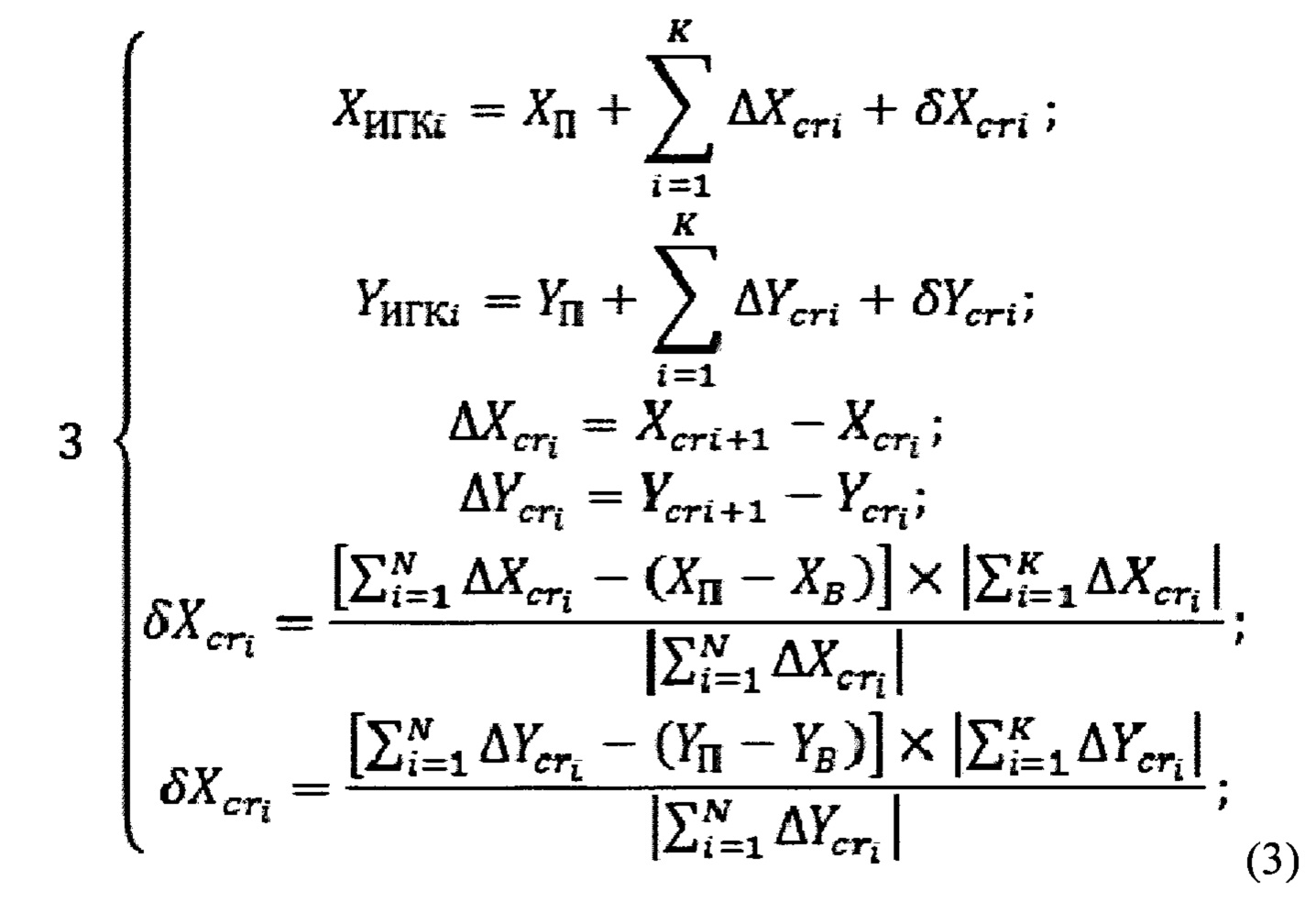
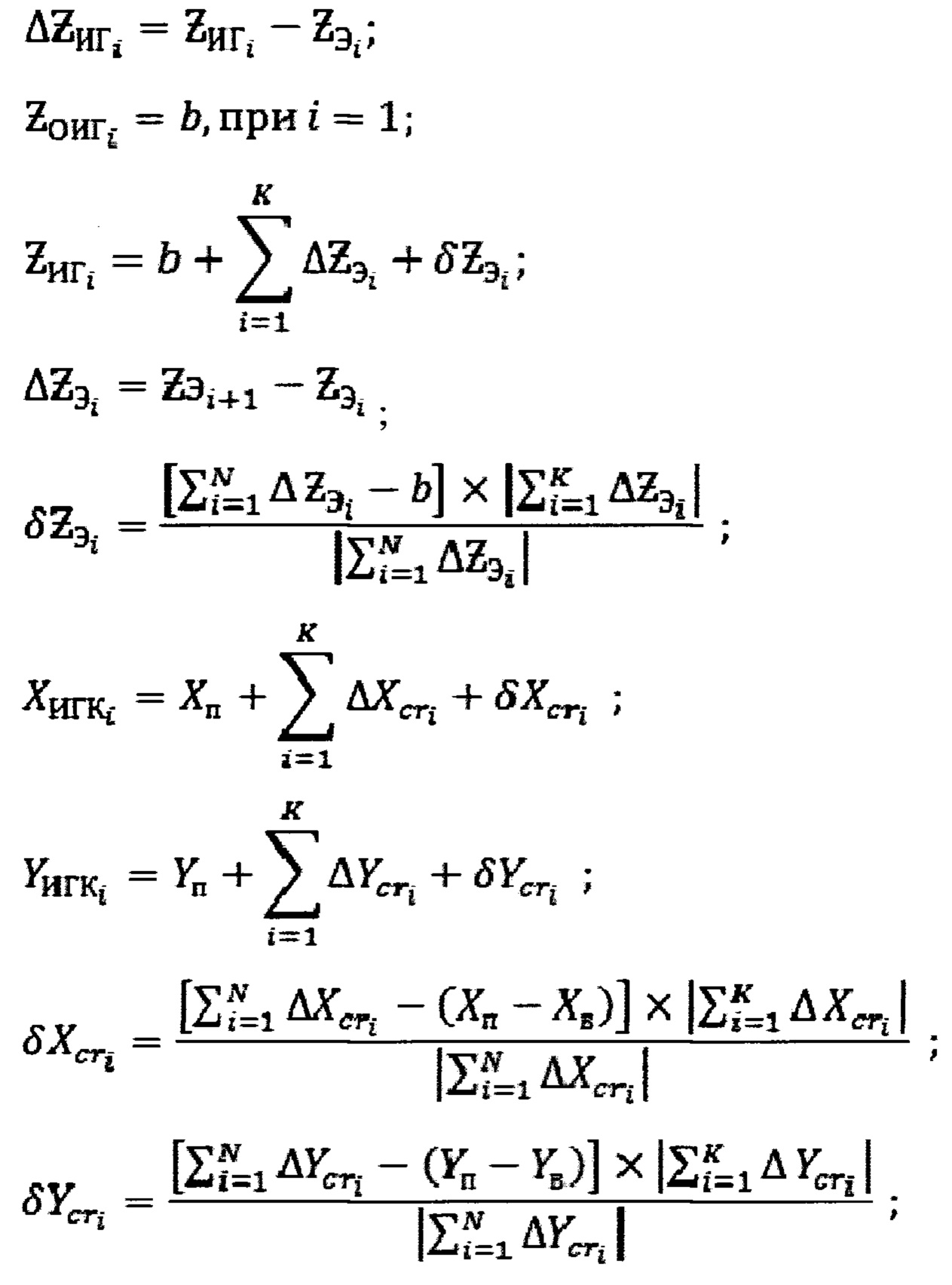
в месте отражения гидроакустического сигнала от поверхности воды акватории по центральному лучу и искомые глубины до "i" горизонта, на котором находится данная антенна, и их искомые геодезические координаты в местах отражения гидроакустических сигналов, излученных по "j" наклонным лучам от поверхности воды акватории  соответственно по следующим новым формульным зависимостям:
соответственно по следующим новым формульным зависимостям:
для центрального луча:
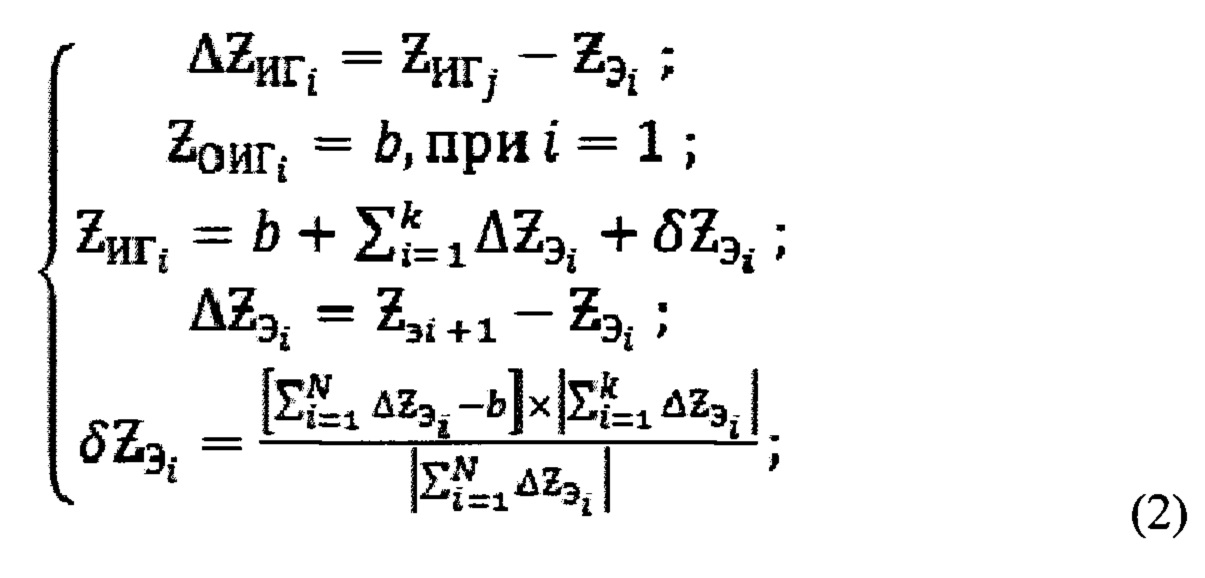
где i=1, 2, 3 … K … N;
K и N - количество приращений  определенных в течение времени погружения от поверхности воды акватории до заданного горизонта тарирования и всплытия до поверхности воды забортной части устройства соответственно;
определенных в течение времени погружения от поверхности воды акватории до заданного горизонта тарирования и всплытия до поверхности воды забортной части устройства соответственно;
 - поправки к глубинам
- поправки к глубинам  и геодезическим координатам
и геодезическим координатам
 соответственно, в случае образования невязок
соответственно, в случае образования невязок
в моменты достижения верхним концом базы поверхности воды акватории при погружении и всплытии забортной части заявленного устройства соответственно.
для наклонных лучей:

поскольку глубина  является одной и той же глубиной от поверхности воды "i" акватории до горизонта, где находится погружаемая приемоизлучающая гидроакустическая многолучевая антенна;
является одной и той же глубиной от поверхности воды "i" акватории до горизонта, где находится погружаемая приемоизлучающая гидроакустическая многолучевая антенна;
где i, j=1, 2, 3, … N
K и N - количество приращений  определенных в течении времени погружения от поверхности воды акватории до заданного горизонта тарирования и всплытия до поверхности воды забортной части заявленного устройства соответственно;
определенных в течении времени погружения от поверхности воды акватории до заданного горизонта тарирования и всплытия до поверхности воды забортной части заявленного устройства соответственно;
θij - углы образованы направлением центрального луча "i" и направлениями наклонных лучей "j" на "i" горизонте;
Углы θij для наклонных лучей слева от центрального луча в направлении зоны зондирования гидроакустических лучей вычисляются по формуле

а для наклонных лучей справа от центрального луча по формуле
на акватории с глубинами до 200 м, углы θij вычисляют по формуле:

где Фd - фазовый сдвиг гидроакустического сигнала, применяемого двум смежными элементами приемоизлучающей многолучевой антенны;
ϑзвпов - скорость распространения звука в воде у поверхности данной антенны, расположенной на конце базы;
f - частота гидроакустического сигнала;
d - длина базы между смежными чувствительными элементами приемоизлучающей многолучевой гидроакустической антенны;
αi - угол крена приемоизлучающей многолучевой гидроакустической антенны на горизонте;
δ - конструктивный угол между смежными чувствительными элементами приемоизлучающей многолучевой гидроакустической антенны;
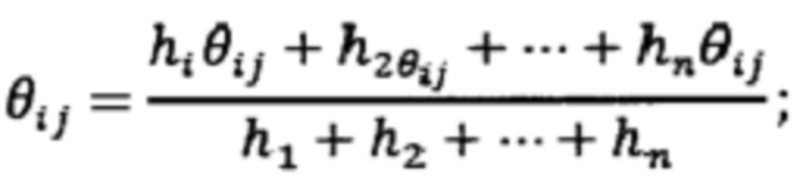
значение θij для горизонта, характеризующего несколькими слоями с различными скоростями распространения звука в воде в каждом слое, рассчитывают как среднее весовое по формуле

где hi -толщина слоя воды, в котором градиент скорости распространения звука в воде изменяется по линейному закону;
n - количество слоев;
 - искомые поправки к глубинам
- искомые поправки к глубинам  и искомые геодезические координаты их мест измерения, определенных на "i" горизонте по центральному лучу и искомые поправки к глубинам
и искомые геодезические координаты их мест измерения, определенных на "i" горизонте по центральному лучу и искомые поправки к глубинам  и искомые координаты их мест измерения, определенные по наклонным лучам соответственно;
и искомые координаты их мест измерения, определенные по наклонным лучам соответственно;
i, j - номер горизонта и наклонного луча соответственно.
При реализации способа, когда имеет место интенсивное перемешивание водных слоев, и скорость распространения звука в воде в результате этого практически постоянная, углы θij можно вычислить по известной формуле (см. Hare R. Depth and Position error budgets for multibeam echosounding. // International Hydrographis Review, - 1995, - v LXXII, №2, p 39-69 [11]).
Поставленная задача достигается так же тем, что заявленное устройство для осуществления заявленного способа содержит базу известной длины, закрепленную по вертикале в стабилизированной в горизонте платформе, например, в кардановом подвесе, положительную плавучесть, закрепленную в верхней части базы, отрицательную плавучесть, закрепленную в нижней части базы, приемоизлучающую многолучевую гидроакустическую антенну многолучевого эхолота, закрепленную в кардановом подвесе с возможностью излучения по центральному лучу по вертикали и по наклонным лучам по заданным направлениям вверх до поверхности воды акватории и приема отраженных от поверхности воды акватории данных сигналов, блок управления, передатчик и измерительный приемный блок многолучевого эхолота, соединенные через блок управления соответственно с приемоизлучающей многолучевой гидроакустической антенной, реле, воспринимающие и исполняющие контакты которого закреплены на верхнем конце базы и соединены с блоком управления, блок определения поправок к глубинам, измеренных многолучевым эхолотом при съемке рельефа дна акватории, вход которого через блок управления соединен с выходом измерительного приемного блока, а выход с входом регистратора, приемник спутниковой радионавигационной системы, антенна которого закреплена на верхнем конце базы, морскую интегрированную малогабаритную навигационную систему, датчик скорости распространения звука в воде, закрепленных в кардановом подвесе, при этом выходы измерительного приемного блока, данных приемника, системы и датчика через блок управления соединены с входом введенного вычислительного комплекта для определения искомых глубин, искомых геодезических координат их места, и искомых поправок к измеренным глубинам, а выход вычислительного комплекса соединен с входом регистратора.
Техническая реализация заявленного изобретения поясняется чертежами (фиг. 1-2):
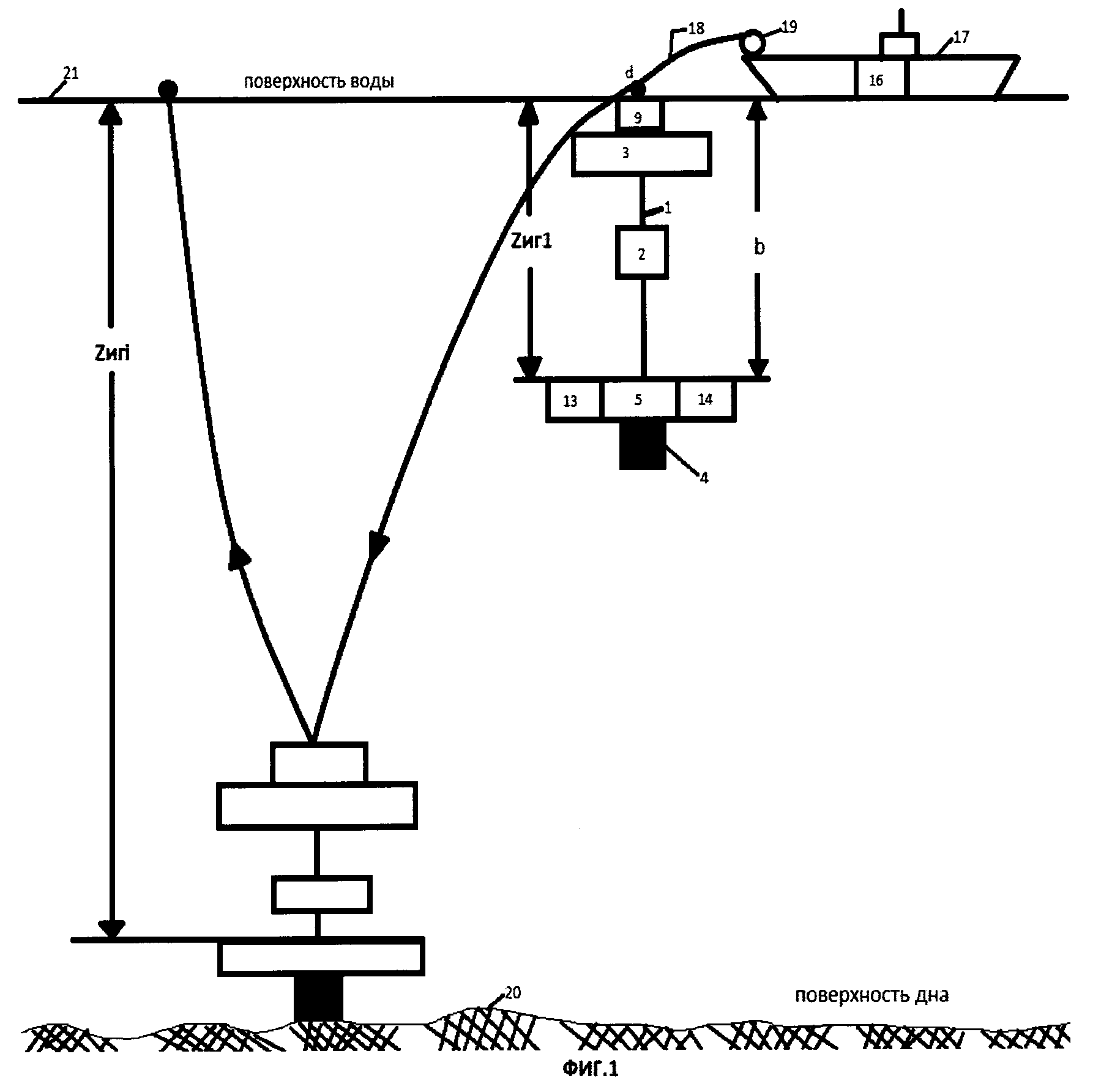
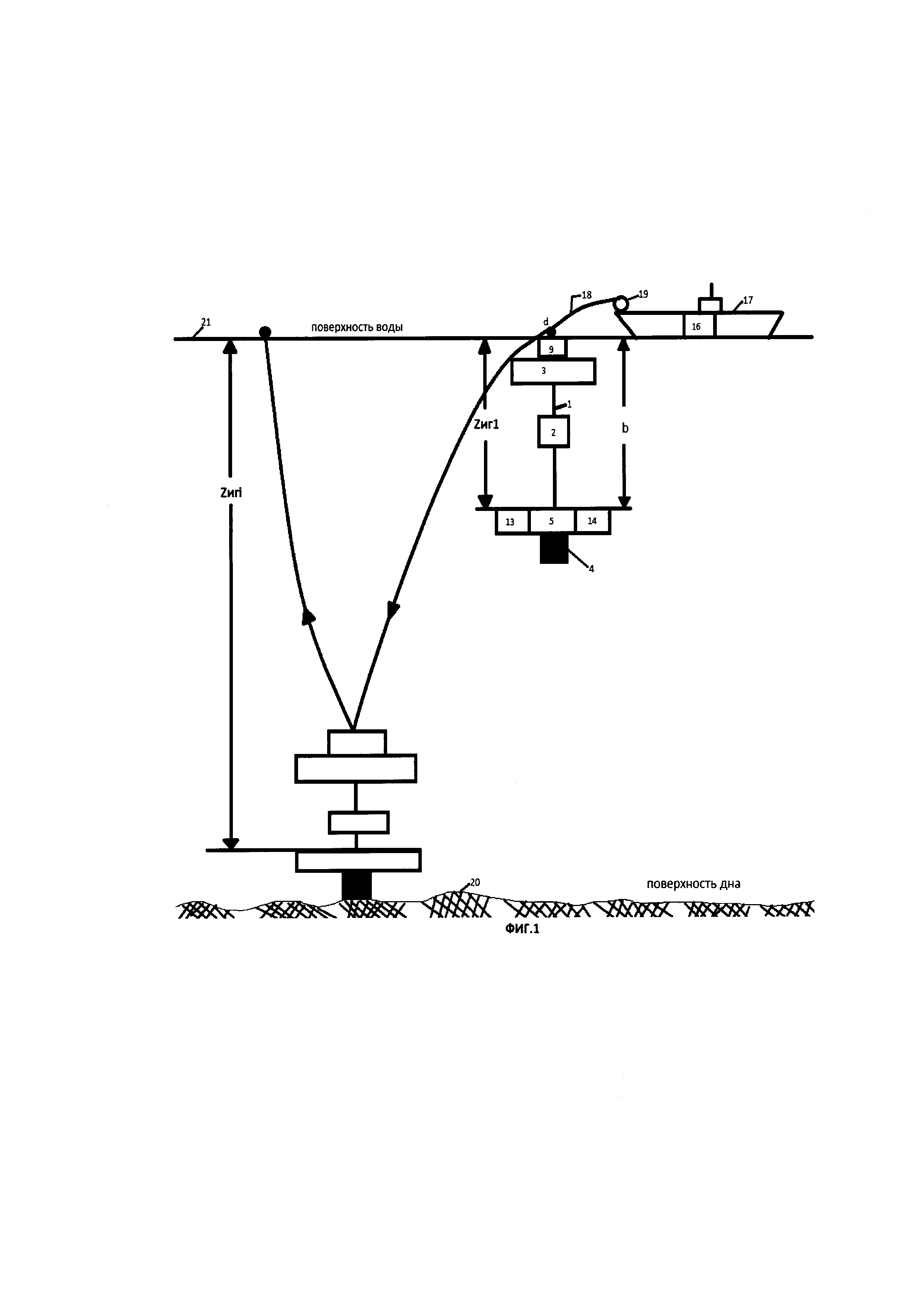
Фиг. 1 - схематическое изображение заявленного способа определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории. При этом на фиг. 1 изображено положение погружаемой части тарирующего устройства относительно поверхности воды:
а) в начале и в конце тарирования;
б) на заданном горизонте тарирования.
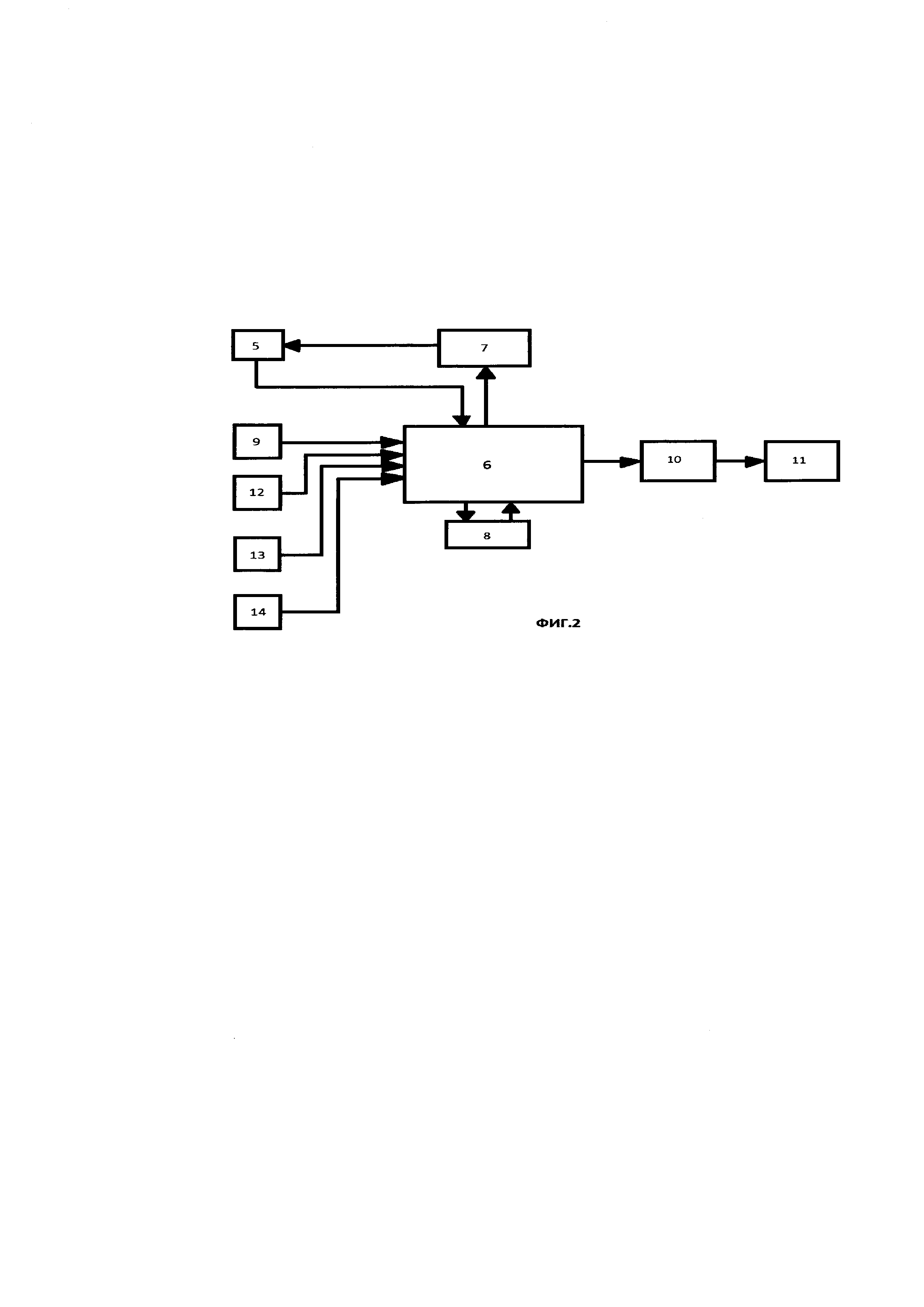
Фиг. 2 - структурная схема заявленного устройства.
Устройство для осуществления заявленного способа (фиг. 1, 2) содержит базу 1 с известной длиной «b», жестко закрепленную в кардановом подвесе 2 в его центре, положительную плавучесть 3 выполненную, например, в виде полой герметической емкости закрепленную в верхней части базы 1 и отрицательную плавучесть 4, выполненную, например, в виде металлического груза, закрепленной в нижней части базы 1, приемоизлучающую многолучевую гидроакустическую антенну 5, закрепленную на нижнем конце базы 1 с возможностью излучения гидроакустических сигналов по центральному лучу по вертикали и по наклонным лучам по заданным направлениям вверх до поверхности воды акватории и приема отраженных от поверхности воды акватории данных сигналов по этим же лучам, блок управления 6, передатчик 7 и измерительный приемный блок 8 многолучевого эхолота, соединенные через блок управления 6 соответственно с приемоизлучающей многолучевой гидроакустической антенной 5, реле 9, воспринимающие и исполняющие контакты которого закреплены на верхнем конце базы 1 и соединены с блоком управления 6, блок определения поправок к глубинам 10, измеренных многолучевым эхолотом при съемке рельефа дна акватории, вход которого через блок управления 6 соединен с выходом измерительного приемного блока 8, а выход с входом регистратора 11, приемник 12 спутниковой радионавигационной системы, антенна которого закреплена на верхнем конце базы 1, морскую интегрированную малогабаритную навигационную систему 13, датчик 14 скорости распространения звука в воде, закрепленных в кардановом подвесе 2, при этом выходы измерительного приемного блока 8, данных приемника 12, системы 13 и датчика 14 через блок управления 6 соединены с входом введенного вычислительного комплекса 10 определения искомых глубин, искомых геодезических координат их места и определения поправок к измеренным глубинам, а выход его с входом регистратора 11.
Погружаемая забортная часть заявленного устройства закреплена на кабель - тросе 18 спускоподъемного устройства 19 судна 17. Связь погружаемой забортной части заявленного устройства с многолучевым эхолотом 16 судна 17 может осуществляться по многожильному или одножильному кабель - тросу 18.
Передатчик 7 и измерительный приемный блок 8 являются составными частями судового многолучевого эхолота 16, блок управления 6, вычислительный комплекс 10, регистратор 11 являются составными частями данного устройства (фиг. 2), могут размещаться на судне 17 или в забортной части данного устройства.
База 1 может быть выполнена в виде герметической емкости, например, в виде металлической трубы с заданным диаметром.
Положительная плавучесть 3 может быть выполнена, например, в виде замкнутой трубы заданного диаметра, являющейся полой замкнутой герметической емкостью с положительной плавучестью типа спасательного круга на воде.
Отрицательная плавучесть 4 может быть выполнена, например, в виде якоря вехи типа «лягушка», масса которой составляет 1,5; 2,5 тонны или может быть использована отрицательная масса карданового подвеса 2.
Морская интегрированная малогабаритная навигационная система (МИМНС) -13, в конкретном исполнении представляет собой МИМНС типа «КАМА», а датчик измерения скорости распространения звука в воде 14, представляет собой датчик типа ВРСЗ (http://www.arms-expo.ru/0490500570501249052057051051.html_[12]).Ha верхнем конце базы закреплена антенна приемника спутниковой радионавигационной системы, типа GPS или «ГЛОНАСС»;
Приемоизлучающая многолучевая гидроакустическая антенна 5 может быть реализована на основе композитных материалов, используемых для создания приемоизлучающих гидроакустических антенн современных многолучевых эхолотов.
Блок управления 6 может быть реализован на основе микропроцессора, обеспечивающего ввод-вывод информации и преобразования сигналов от нескольких датчиков, например, микропроцессора семейства AVK фирмы АТМЕС.
Вычислительный комплекс 10 может быть реализован, например, на основе ЭВМ PC/AT фирмы IBM со специальным программным обеспечением.
Реализация заявленного способа определения поправок к глубинам, измеренных многолучевым эхолотом при съемке рельефа дна акватории, заявленным устройством осуществляется следующим образом.
Перед съемкой рельефа дна на акватории выбирается место с ровным дном и наибольшей глубиной. В данном месте судно 17 устанавливают на якорь или судно 17 находится в дрейфе.
Забортную часть заявленного устройства с помощью судового спускоподъемного устройства 19 на кабель-тросе 18 опускают до заданного горизонта или до поверхности дна 20, а затем поднимают по поверхности воды 21 акватории.
Благодаря закреплению базы 1 в центре карданового подвеса 2 под действием сил (подъемной и силы тяжести), возникающих за счет наличия в заявленном устройстве положительной 3 и отрицательной 4 плавучестей, жестко соединенных на верхнем и нижнем концах базы 1 соответственно, база 1 примет вертикальное положение и будет сохранять его при погружении до заданного горизонта или до поверхности дна 20 и подъема до поверхности воды 21 акватории, за счет чего будет обеспечена работоспособность заявленного устройства.
При погружении забортной части заявленного устройства в воду в момент соприкосновения с водой воспринимающие и исполнительные контакты реле 9 замыкают в блоке Xп, Yп; Xв, Yв управления 6 электрические цепи формирования импульсов запуска передатчика 7, при этом приемоизлучающая многолучевая гидроакустическая антенна 5 излучает гидроакустические сигналы вверх до поверхности воды акватории 21 и принимает отраженные данные сигналы от поверхности воды акватории и преобразовывает их в электрические сигналы, поступающие на вход измерительного приемного блока 8, в котором вырабатываются электрические сигналы пропорциональные глубине погружения антенны 5 по каждому лучу данной антенны, которые поступают на вход вычислительного комплекса 10.
Так же на вход вычислительного комплекса 10 по управляющим сигналам блока управления 6 поступают через блок управления 6 электрические сигналы пропорциональные счисленным геодезическим координатам мест нахождения антенны 5, ее крену αi и азимуту Ai активной ее части, определенные морской интегрированной малогабаритной системой 13, а также электрические сигналы пропорциональные опорным геодезическим координатам измеренные приемником спутниковой радионавигационной системы 12 в моменты погружения и всплытия верхнего конца базы 1 с антенной данного приемника 12, электрические сигналы пропорциональные скорости распространения звука в воде, измеренные датчиком 14 скорости распространения звука в воде.
В вычислительном комплексе 10 по алгоритму, созданному по соответствующим математическим зависимостям (2-10) определяются искомые глубины  и их искомые геодезические координаты места определения
и их искомые геодезические координаты места определения  и истинные поправки к глубинам, измеренным многолучевым эхолотом.
и истинные поправки к глубинам, измеренным многолучевым эхолотом.
Вычисленные в комплексе 10 значения искомых поправок  а так же их искомых геодезических координат
а так же их искомых геодезических координат  соответственно в машинном коде поступают в регистратор 11.
соответственно в машинном коде поступают в регистратор 11.
Оценку точности заявленного способа и устройства можно произвести следующим образом. Анализ формул (2-4) позволяет сделать заключение о том, что если считать разности смежных глубин для центрального луча  и разность смежных геодезических координат
и разность смежных геодезических координат  а так же для наклонных лучей разность смежных счислимых геодезических координат
а так же для наклонных лучей разность смежных счислимых геодезических координат  то под знаком Σ суммы в правых частях данных формул не отягощены постоянными и систематическими погрешностями, поскольку они практически равны в смежных глубинах
то под знаком Σ суммы в правых частях данных формул не отягощены постоянными и систематическими погрешностями, поскольку они практически равны в смежных глубинах  и смежных счислимых геодезических координатах
и смежных счислимых геодезических координатах  а, следовательно, в разности данные погрешности исключаются. В случае неточного их исключения возникают поправки за невязки
а, следовательно, в разности данные погрешности исключаются. В случае неточного их исключения возникают поправки за невязки  которые определяются и учитываются по соответствующим формулам (3-6). Имеющиеся случайные инструментальные погрешности незначительные по величине у современных используемых технических средств и имеют разные знаки, а, следовательно, при большом количестве данные погрешности, в соответствии с теорией вероятности, в значениях суммы «∑» будут стремиться у нулю.
которые определяются и учитываются по соответствующим формулам (3-6). Имеющиеся случайные инструментальные погрешности незначительные по величине у современных используемых технических средств и имеют разные знаки, а, следовательно, при большом количестве данные погрешности, в соответствии с теорией вероятности, в значениях суммы «∑» будут стремиться у нулю.
Таким образом, погрешности определения искомых поправок к глубинам и искомых геодезическим координатам их места определения практически будут равны соответственно погрешности определения опорной эталонной глубины, в качестве которой используют длину базы 1, которую можно измерить с сантиметровой точностью, и опорных геодезических координат XП, YП в месте погружения верхнего конца базы и Xв Yв в месте всплытия ее на поверхность акватории, которые можно определить приемником спутниковой радионавигационной системой типа GPS-15, с погрешностью 0,2 м [4].
Допустимая погрешность определения глубины  и геодезических координат ее места определения X, Y в соответствии с требованиями по точности стандартной международной гидрографической организации не должны превышать знаний
и геодезических координат ее места определения X, Y в соответствии с требованиями по точности стандартной международной гидрографической организации не должны превышать знаний  на глубинах 100 м и
на глубинах 100 м и  на глубинах 200 м, геодезические координаты не должны превышать 11 м (Стандарт МГО на гидрографические работы. Специальная публикация №44. Четвертое издание. Монако. 1996 г. [13]).
на глубинах 200 м, геодезические координаты не должны превышать 11 м (Стандарт МГО на гидрографические работы. Специальная публикация №44. Четвертое издание. Монако. 1996 г. [13]).
На основании изложенного можно заключить, что заявленные способ и устройство обеспечивают определение искомых поправок к глубинам, измеренным многолучевым эхолотом, и геодезических координат мест их определения с точностью на порядок и более по сравнению с требуемыми значениями точности.
На основании изложенного можно сделать заключение о том, что заявленные способ и устройство можно использовать для тарирования многолучевого эхолота и для создания опорных гидрографических пунктов на акватории съемки с целью метрологического обеспечения метода съемки рельефа дна акватории многолучевым эхолотом.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известны способ и устройство определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, включающие погружение на вертикально удерживаемой базе до заданного горизонта тарирования, а затем подъем на поверхность акватории расположенных на нижнем конце этой базы приемоизлучающей многолучевой гидроакустической антенны многолучевого эхолота с возможностью излучения гидроакустических сигналов до поверхности акватории, морской интегрированной малогабаритной навигационной системы, датчика скорости распространения звука в воде, а на верхнем конце этой базы, реле, приемника спутниковой радионавигационной системы, в забортной части заявленного устройства расположены передатчик, измерительный приемный блок, блок управления, вычислительный комплекс определения искомых глубин погружения данной антенны и искомых геодезических координат мест ее нахождения, искомых поправок к глубинам, измеренных многолучевым эхолотом расчетным путем по новым формульным зависимостям.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и приспособления, используемые для изготовления морских приборов и технических средств.
Технико-экономическая эффективность заявленного способа и устройства заключается в существенном упрощении процесса и уменьшении трудоемкости определения поправок к глубинам, измеренных многолучевым эхолотом по его измеренному диапазону, за счет отсутствия необходимости использования в заявленном изобретении нормированных измерительных приборов (двух датчиков гидростатического давления и двух датчиков температуры воды) для обеспечения получения метрологическими характеристиками измеряемых эхолотом глубин, а, следовательно, отсутствует необходимость обеспечения синхронности измерения их гидростатического давления и температуры воды на концах вертикально удерживаемой базы, и их калибровку с целью определения цены деления измерительных писал данных датчиков и определения ухода их путей отсчета в течение определенного времени на акватории съемки, для чего необходимо иметь на съемочном судне метрологическую лабораторию со сложной метрологической аппаратурой.
Источники информации
1. Правила гидрографической службы №4. Съемка рельефа дна (ПГС №4.). - Л: Издание ГУНиО МО СССР, 1984 г.
2. Дадашев А.А. Тарирование многолучевого эхолота на пересекающихся галсах. //. Записки по гидрографии. - 2000, - №251. С. 42-46.
3. Коломийчук Н.Д. Гидрография. - Л: Издание ГУНиО МО СССР, 198 г.
4. Патент RU №2292062 от 20 января 2007 г.
5. Белобров А.П. Гидрографические работы. - Л: Издание Гидрографического управления, - 1984 г.
6. Патент RU №2292062 С2, 20.01.2007 (прототип).
7. Патент RU №2340916 С1, 10.12.2008.
8. Патент RU №2326408 С1, 10.06.2008.
9. Патент JP №10325871 А, 08.12.1998.
10. Патент JP №4372890 А, 25.12.1992.
11. http://www.arms-expo.ru/0490500570501249052057051051.html.
12. Hare R. Depth and Position error budgets for multibeam echosounding. // International Hydrographis Review, - 1995, - v LXXII, №2, p 39-69.
13. Стандарт МГО на гидрографические работы. Специальная публикация №44. Четвертое издание. Монако. 1996 г.














Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью

