Результат интеллектуальной деятельности: ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ
Вид РИД
Изобретение
Изобретение относится к устройствам, предназначенным для океанографических и геологических исследований, ремонтных работ, для установки и обслуживания подводного оборудования.
Известен подвижный морской аппарат для подводных исследований, выполненный в виде подводной лодки для морских исследований (Новинки в мире ВВТ в 2008 году, nvo.ng.ru, 2008-12-26 [1], Тарас А.Е. Атомный подводный флот 1955-2005. М.: ACT, Харвест, 2006, с.41-216. ISBN 985-13-8436-4 [2]), который имеет следующие характеристики: скорость надводная 4,5 уз, подводная 3,5 уз. Предельная глубина погружения 915 м. Автономность 16 суток, предельная 25 суток. Экипаж 13 человек. Водоизмещение 400 т. Длина 45 м, прочный корпус 29,3 м, ширина 3,8 м, по стабилизаторам 48 м. Осадка 4,6 м. При этом он оснащена реактором, двумя электромоторами, двумя гребными валами и четырьмя подруливающими устройствами.
Основой энергетической установки является атомный реактор, передающий энергию на генератор переменного тока. Генератор питает два электромотора, которые вращают два гребных винта. Рули глубины размещены на рубке, вертикальный руль имеет обычную конструкцию и размещен в хвосте. Маневренность лодки улучшают четыре поворотных подруливающих устройства.
Она также оснащена комплексом электронного, компьютерного и гидроакустического оборудования, который решает задачи навигации, связи, обнаружения и идентификации подводных объектов, а также подъема находок на поверхность. Лодка способна изучать морское дно, измерять температуру и направление течений, получать различную информацию для коммерческого и научного использования. Она обладает очень высокой маневренностью. Существенной особенностью является способность висеть в воде без движения, позиционируясь с высокой точностью. Атомный реактор обеспечивает независимость от надводных кораблей обеспечения и позволяет двигаться в погруженном состоянии длительное время, ограниченное только запасами пищи для экипажа.
Для глубоководных работ лодка оснащена выдвижными колесами, тремя иллюминаторами, системой внешнего освещения, неподвижными и подвижными телекамерами, многоцелевым захватом-манипулятором, корзиной для образцов и вспомогательных приспособлений. Ориентирование на поверхности осуществляется при помощи телекамеры, зафиксированной на неопускаемой мачте на крыше рубки вместо выдвижного перископа.
Благодаря способности оставаться длительное время под водой лодка является главным инструментом глубоководного поиска. При этом она работает даже тогда, когда погодные условия на поверхности и морское волнение заставляли все надводные суда возвращаться в порт.
В силу невысокой скорости движения, обычно доставляется в зону погружения на буксире у надводного судна обеспечения, которое также способно участвовать в исследованиях, дополняя лодку и предоставляя условия для отдыха экипажа и пополнения запасов. Лодка работает в паре с судном, которое обеспечивает буксировку, связь, постановку на якорь и помощь при работе лодки.
Однако использование только штатного оборудования, включающего гидроакустический лаг, гидролокатор бокового обзора, многолучевой эхолот, курсоуказатель, магнитный компас, а также подвижные и неподвижные телекамеры, многоцелевой захват-манипулятор и корзину для образцов, существенно ограничивает объем выполняемых подводных работ.
В последние годы существенно расширились подводные работы, связанные с освоением шельфов, включая моря Северного Ледовитого океана.
Существующие технические средства для выполнения подводных работ, например подводные аппараты, оснащенные гидроакустической аппаратурой (Навигационный комплекс автономного подводного робота и особенности его применения в условиях Арктики / Ю.В.Ваулин, А.В.Инзарцев, А.В.Каморный и др. // Подводные исследования и робототехника. Институт проблем морских технологий ДВО РАН, Владивосток, №1(5), 2008, с.24-31 [3]), не обеспечивают необходимый объем проводимых исследований на шельфе, включая батиметрическую и сейсмическую съемку, ввиду их небольшой автономности, а также не обеспечивают требуемую точность в получении результатов исследований.
Задачей заявляемого технического решения является расширение функциональных возможностей подвижных морских аппаратов для морских исследований.
Поставленная задача решается за счет того, что подвижный морской аппарат для морских исследований, оснащенный атомным реактором, двумя электромоторами, двумя гребными валами, четырьмя подруливающими устройствами, выдвижными колесами, тремя иллюминаторами, системой внешнего освещения, неподвижными и подвижными телекамерами, многоцелевым захватом-манипулятором, корзиной для образцов и вспомогательными приспособлениями, комплексом электронного, компьютерного и гидроакустического оборудования для решения задачи навигации, связи, обнаружения и идентификации подводных объектов, а также подъема объектов на поверхность, при этом комплекс электронного, компьютерного и гидроакустического оборудования для решения задачи навигации и связи включает гидроакустический лаг, гидролокатор бокового обзора, многолучевой эхолот, гидроакустическую навигационную систему, курсоуказатель, автопрокладчик, информационно связанные со средством обработки, документирования и хранения измеренных параметров движения подвижного морского аппарата и окружающей подводной обстановки, в котором, в отличие от прототипа, корзина для образцов и вспомогательных приспособлений снабжена электронным, компьютерным и гидроакустическим оборудованием, а в комплекс электронного, компьютерного и гидроакустического оборудования для решения задачи навигации, связи, обнаружения и идентификации подводных объектов подвижного морского аппарата для морских исследований дополнительно введены однолучевой эхолот, гидроакустический параметрический профилограф, малогабаритная ИНС, приемник спутниковой навигационной системы, магнитометр, гравиметр и гидрофизический модуль, информационно соединенные с системой обработки информации, которая также соединена кабельным и/или гидроакустическим каналом связи с корзиной для образцов и вспомогательных приспособлений, которая оснащена магнитометром, гравиметром, блоком сейсмических датчиков, датчиком обнаружения метана, спектроанализатором для измерения спектров комбинационного рассеяния оптического излучения, пенетрометром для выполнения морской грунтовой съемки, блоком контроля радиоактивного загрязнения, блоком гидрохимических измерений, гидрофизическим модулем, каналами спутниковой и гидроакустической связи, промерным эхолотом, гидроакустическим профилографом, батометром, многоцелевым захватом-манипулятором, измерителем скорости и угла дрейфа, курсоуказателем, феррозондовым скважинным иклинометром, информационно соединенными с системой обработки информации подвижного морского аппарата для морских исследований.
Сущность изобретения поясняется чертежом (фиг.1).
Фиг.1. Подвижный морской аппарат для морских исследований. Подвижный морской аппарат для морских исследований состоит из легкого 1 корпуса и прочного 2 корпуса. Атомный реактор 3 установлен внутри прочного 2 корпуса, в котором установлены два электромотора 4. Подвижный морской аппарат для морских исследований также оснащен двумя гребными валами 5, четырьмя подруливающими устройствами 6, выдвижными колесами 7, тремя иллюминаторами 8, системой внешнего освещения 9, неподвижными 10 и подвижными 11 телекамерами, многоцелевым захватом-манипулятором 12, корзиной 13 для образцов и вспомогательными приспособлениями 14, комплексом 15 электронного, компьютерного и гидроакустического оборудования для решения задачи навигации, связи, обнаружения и идентификации подводных объектов, а также подъема объектов на поверхность, при этом комплекс 15 электронного, компьютерного и гидроакустического оборудования для решения задачи навигации и связи включает гидроакустический лаг 16, гидролокатор 17 бокового обзора, многолучевой эхолот 18, гидроакустическую навигационную систему 19, курсоуказатель 20, автопрокладчик 21 информационно связанные со средством 22 обработки, документирования и хранения измеренных параметров движения подвижного морского аппарата и окружающей подводной обстановки.
В комплекс 15 электронного, компьютерного и гидроакустического оборудования дополнительно введены однолучевой эхолот 23, гидроакустический параметрический профилограф 24, малогабаритная ИНС 25, приемник 26 спутниковой навигационной системы, магнитометр 27, гравиметр 28 и гидрофизический модуль 29, информационно соединенные со средством 22 обработки, документирования и хранения измеренных параметров, которое также соединено кабельным и/или гидроакустическим каналом 30 связи с корзиной 13 для образцов и вспомогательного оборудования, которая оснащена магнитометром 27, гравиметром 28, блоком сейсмических датчиков 31, датчиком обнаружения метана 32, спектроанализатором 33 для измерения спектров комбинационного рассеяния оптического излучения, пенетрометром 34 для выполнения морской грунтовой съемки, блоком 35 контроля радиоактивного загрязнения, блоком 36 гидрохимических измерений, гидрофизическим 37 модулем, каналами спутниковой 38 и гидроакустической 39 связи, промерным эхолотом 40, гидроакустическим профилографом 41, батометром 42, многоцелевым захватом-манипулятором 12, измерителем 43 скорости и угла дрейфа, курсоуказателем 20, феррозондовым скважинным иклинометром 44, блоком пространственной ориентации 45, информационно соединенными со средством 22 обработки, документирования и хранения измеренных параметров подвижного морского аппарата.
Однолучевой эхолот 23 представляет собой штатный навигационный эхолот типа НЭЛ-М1, предназначенный для измерения, индикации и регистрации глубин под днищем корзины 13 для образцов и вспомогательного оборудования в соответствии со стандартом INO S-44.
В качестве многолучевого эхолота 18 применен эхолот типа «Sea Bat 7150», позволяющий производить съемку рельефа дна в полосе 15 км, что позволяет оценивать изменения глубины и характера рельефа дна на участке большой площади по трассе движения подвижного морского аппарата для подводных исследований.
Гидролокатор 17 бокового обзора представляет собой параметрический гидролокатор, который работает в диапазоне разностных частот от 5 до 50 кГц. Причем разностная частота может изменяться в указанном диапазоне как вручную (плавно), так и автоматически от импульса к импульсу через 2, 4, 6, 8 и 10 посылок. Шаг перестройки в автоматическом режиме составляет 175 кГц. Перестройка разностной частоты может осуществляться и в течении одного импульса по линейному закону (излучение линейно-частотно-модулированных импульсов). Длительность зондирующих импульсов меняется от 0,1 до 300 мкс. Средняя частота накачки составляет 165 кГц. Ширина характеристики направленности во всем диапазоне частот постоянна и составляет 4 градуса. Посредством гидролокатора 17 обеспечивают контроль, например, уложенного подводного кабеля или подводного трубопровода для транспортировки углеводородов в границах траншеи.
Параметрический профилограф 24 работает на трех фиксированных частотах 7, 10,5 и 14 кГц. Излучение зондирующих сигналов длительностью 0,5-1 мкс обеспечивается нелинейным взаимодействием сигналов накачки с частотой 154 кГц и сигналов с частотами 147, 143,5 и 140 кГц соответственно. Ширина характеристики направленности излучающей параметрической антенны постоянна во всем диапазоне рабочих частот и составляет 2×4 градуса на уровне -3 дБ. Ширина характеристики направленности на уровне -3 дБ широкополосной приемной антенны в зависимости от рабочей частоты изменяется в пределах 10×26 градусов (на частоте 14 кГц) до 20×52 градусов (на частоте 7 кГц). Индикация эхо-сигналов в параметрическом профилографе 24 обеспечивается в цветовой гамме на экране электронного индикатора средства 22 обработки, документирования и хранения измеренных параметров подвижного морского аппарата.
Посредством параметрического профилографа 8 контролируют глубину укладки коммуникационного кабеля или магистрального подводного трубопровода для транспортировки углеводородов, путем профилирования донных осадочных пород и уложенного на дно кабеля, поиск затонувших объектов.
Аналогами гидролокатора 17 бокового обзора и параметрического профилографа 24 являются устройства, описанные в кн.: Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. Ростов н/Д: Ростиздат, 2004, с.224-268.
Блок сейсмических датчиков 31 включает измерительные датчики геофонного и гидрофонного типов, измеритель скорости звука, блок регистрации и управления, который предназначен для синхронной оцифровки и регистрации сигналов от сейсмических и иных датчиков различного типа. Оцифровка сигналов производится с помощью 8-канального дельта-сигма АЦП с разрешением в 24 бита. Он имеет энергонезависимую память объемом 16 Гб, а также дополнительную энергонезависимую память для хранения служебной информации и данных калибровки времени с частотой квантования 100 Гц, емкостью памяти 16 Гб и продолжительностью непрерывной записи 160 суток.
Датчик обнаружения метана 32 представляет собой датчик типа METS ("CAPSUM"), который позволяет измерять концентрацию метана в водной толще. Датчик представляет собой полупроводниковый прибор, принцип работы которого заключается в том, что диффузия молекул углеводородов из воды через специальную силиконовую мембрану транслируется в камеру датчика. Адсорбция молекул углеводов на активном слое датчика приводит к электронному обмену с молекулами кислорода, таким образом, меняя сопротивление активного слоя, которое преобразуется в выходное (измеряемое) напряжение.
Основные характеристики датчика:
10 µм силиконовая мембрана;
рабочая глубина 0-3500 м;
рабочая температура 2-20 градусов C;
время измерения от 1 до 3 сек;
время стабилизации диффузии до 5 минут, в зависимости от турбулентности;
входное напряжение 9-36 В;
расход энергии 160 мА/ч;
выходной сигнал - аналоговый 0-5 В и цифровой RS-485;
метан 50 нмоль/л - 10 мкмоль/л.
Блок 36 гидрохимических измерений предназначен для измерения спектров комбинационного рассеяния оптического излучения посредством спектроанализатора 33. По спектрам комбинационного рассеивания получают информацию о составе морской воды. Основные технические характеристики спектроанализатора: спектральный диапазон 0,52-0,78 мкм, полоса пропускания 0,54 нм на 0,783 мкм, точность позиционирования по спектру 0,2 нм, число спектральных каналов 4096.
Спектроанализатор 33 для измерения спектров комбинационного рассеяния оптического излучения предназначен для измерения спектров комбинационного рассеяния оптического излучения в составе подводной станции. По спектрам комбинационного рассеивания получают информацию о составе морской воды. Основные технические характеристики спектроанализатора 1: спектральный диапазон 0,52-0,78 мкм, полоса пропускания 0,54 нм на 0,783 мкм, точность позиционирования по спектру 0,2 нм, число спектральных каналов 4096.
Пенетрометр 34 представляет собой зонд, установленный на многоцелевом захвате-манипуляторе 12, представляющем собой телескопическое устройство, и который предназначен для выполнения морской грунтовой съемки. Пенетрометр представляет собой конусовидный снаряд, оснащенный датчиками, которые под действием силы тяжести заглубляются в грунт. Аналогом пенетрометра 36 является пенетрометр типа «CPT Fugro» с глубиной проникновения зонда в грунт до 20 м. По измеренным коэффициентам сопротивления и трения определяются прочностные характеристики грунта.
Аналогом гравиметра 28 является гравиметр типа BGM-3, обеспечивающий выполнение точных измерений при больших помехах.
Блок 35 контроля радиоактивного загрязнения содержит модуль контроля радиационного загрязнения, который предназначен для определения in situ содержания гамма-излучающих радионуклидов (как техногенного, так и естественного происхождения) в морской воде.
Основные технические характеристики модуля контроля радиационного загрязнения: диапазон регистрируемых энергий 0,2-3,0 мэВ, энергетическое разрешение по линии цезия 137 13%, число уровней квантования спектра 256, максимальное число отсчетов в канале 65000, максимальная скорость регистрации не менее 1000 1/с.
Блок гидрохимических измерений 36 содержит классификатор для классификации загрязнений морской воды по спектральным характеристикам и молекулярному составу морской воды. Аналогами датчиков блока гидрохимических измерений являются устройства, приведенные в источниках (1. Основные процессы и аппаратура химической технологии. Под ред. Дытнерского Ю.Н. - М.: Химия, 1983. 2. Химико-аналитические комплексы фирмы Agilent Technologies (US), http://www.chem.agilent.com. 3. Химико-аналитические комплексы фирмы SRI Instruments (US), http://www.perichrom.com. 4. Химико-аналитические комплексы ЗАО "Хроматэк" (RU), http://www.chronomatec.ru.).
Гидрофизический модуль 29 состоит из двух основных компонентов: акустического трехкомпонентного измерителя течений типа 3D-ACM модель 3ACM-CBP-S и измерителя электропроводности и температуры, выполненного на основе измерителя скорости течения типа CTS-C-1ED.
Акустический трехкомпонентный измеритель течения измеряет три компоненты скорости течения на одном горизонте и включает в себя трехкомпонентный магнитный компас для измерения магнитного поля Земли в трех проекциях, двухосевой электролитический инклинометр для измерения отклонения от вертикали, твердотельный датчик температуры. Принцип измерения скорости течения основан на измерении разности времен пролета акустического импульса в прямом и обратном направлении («времяпролетный» измеритель). Он может быть также оснащен датчиком давления, для измерения глубины в месте постановки датчика скорости течения. Он также имеет интерфейс для подключения датчика солености и температуры и два входных канала постоянного тока для подключения внешних датчиков. Результаты измерений передаются в реальном времени в формате ASCII по последовательному интерфейсу RS-232 или RS-485 при скорости 19200 бит/сек, либо записываться в стандартное статическое ОЗУ размером 0,5 МБ, питаемое литиевой батареей, для последующего считывания. Он имеет глубину постановки до 7000 м и вариант «прибрежной» постановки до 1000 м глубины (в зависимости от конструктивного исполнения корпуса и диапазона измерения датчика давления).
Программное обеспечение (программа 3DACM97) позволяет конфигурировать и настраивать датчик с использованием стандартного пользовательского интерфейса Windows. Данные могут передаваться в режиме реального времени или считываться из внутренней памяти прибора. Данные, передаваемые в режиме реального времени, могут быть представлены в графическом виде на экране дисплея. Программное обеспечение в режиме реального времени принимает и сохраняет данные о векторе скорости, данные с трехкомпонентного компаса, инклинометра, данные с дополнительных датчиков, включая датчик солености, температуры, давления.
Данные о векторе скорости и показания инклинометра 44 усредняются с помощью алгоритма векторного осреднения по временному интервалу от 15 секунд до 60 минут. Программа ACMPost, позволяет графически отображать прочитанные данные на дисплее и сохранять данные по измерениям солености, температуры, давления в файле стандарта DAT C00 и HDR. Эти форматы также могут читаться программой ACMPost.
Измеритель электропроводности и температуры включает датчик температуры и датчик электрической проводимости, выполненые в виде единого модуля, который обеспечивает возможность высокоточного измерения электропроводности и температуры.
Электронный интерфейс обеспечивает выход напряжения постоянного тока пропорционально электропроводности и температуре. Управление выходом напряжения достигается посредством двух управляемых пользователем логических линий.
Датчики электропроводности и температуры основаны на датчике электропроводности с индуктивной связью. Индуктивные датчики демонстрируют естественную устойчивость, в отличие от датчиков, основанных на незащищенных электродах, при изменении их геометрии, которая вызывается биообрастанием. Большой внутренний диаметр датчика электропроводности устраняет необходимость в насосе или других искусственных средствах проведения потока воды через датчик. Использование высококачественного платинового термометра сопротивления приводит к линейным измерениям температуры, характеризуемым высокой стабильностью. Электронный сигнал очень линеен, что устраняет необходимость использования комплексных уравнений для преобразования выходных сигналов в физические величины.
Коммуникационный протокол модуля включает в себя развитую систему команд, позволяющую организовать работу с модулем наиболее удобным для пользователя образом.
Модуль может работать в одном из четырех режимов:
- режим RUN MODE (normal).
В этом режиме модуль осуществляет измерения всех параметров.
- режим RUN MODE (fast pressure)
В этом режиме измерения осуществляются только для датчика давления и передается значение только величины давления.
Режимы OPEN MODE (изменение констант калибровки) и CAL MODE (проведение калибровки) являются вспомогательными и используются при проведении метрологического обслуживания прибора. Измеренные величины автоматически пересчитываются в физические значения и в таком виде (в ASCII-кодах) передаются пользователю, а также записываются в память, откуда могут быть считаны позднее в произвольный момент времени.
Блок пространственной ориентации 45 представляет собой датчик пространственной ориентации и предназначен для определения точного положения в пространстве блока сейсмических датчиков 31 и корзины 13 для образцов и вспомогательного оборудования.
В качестве датчика блока пространственной ориентации 45 используется модуль электронного компаса типа ТСМ 2.50, который представляет собой трехосевой курсовой компас с компенсатором наклона, конструктивно выполненный на одной плате с блоком электроники. Компас оснащен системой электронной компенсации, которая позволяет производить точные вычисления азимута, бортового наклона (крена) и килевого наклона (тангажа) при угловых положениях ±50 градусов.
Магнитометр 27 изготовлен на базе чувствительного элемента (датчика) феррозондового магнитометра типа lemi-018B и предназначен для измерения 3-х компонент индукции магнитного поля Земли и их вариаций, а также температуры.
В состав магнитометра 27 входят: блок сенсоров, в котором находятся первичные измерительные преобразователи магнитного поля, и блок электроники, который имеет встроенный термометр для измерения температуры внутри блока. Блок электроники и блок датчиков размещены в прочных корпусах и соединены специальным кабелем.
Магнитометр 27 является полностью автономным автоматическим прибором, управляемым микропроцессорной системой, построенной на базе микроконтроллера.
Микроконтроллер руководит работой магнитометра и передает данные о магнитном поле и температуре по UART порту. Магнитное поле измеряется феррозондовым датчиком, который располагается на расстоянии от 1 м и более от блока электроники. Феррозондовый датчик и блок электроники соединены между собой специальным тестовым кабелем.
Феррозондовый датчик возбуждается напряжением возбуждения с частотой f1=5236 Гц. Выходные сигналы датчика усиливаются и фильтруются с помощью фазовых чувствительных усилителей (ФЧУ) ключевого типа. На их выходах формируется сигнал с частотой второй гармоники напряжения возбуждения f2=10472 Гц. Отфильтрованный сигнал поступает с выхода каждого ФЧУ на один из каналов трехканального аналого-цифрового преобразователя АЦП.
Для вычисления одного значения магнитного поля используется формула:

Вычисление измеряемых значений UJ по такой формуле устраняет влияние температурного смещения нуля избирательного усилителя, а также АЦП.
Далее производится усреднение измеряемых n раз значений Uj (j=1…n) за период времени, кратный 20 мс (период частоты 50 Гц). Это позволяет уменьшить шумы по цепи входного сигнала, а также значительно ослабить влияние сети частотой 50 Гц. Выделение усредненной за этот период величины измеряемого сигнала Uc выполняется по формуле:
Ввиду большого значения n полученное среднее значение Uc по каждому каналу весьма устойчиво к случайным сбоям и используется для создания сигнала компенсации с помощью двух цифроаналоговых преобразователей ЦАП, которые далее суммируются и преобразуются в ток компенсации с помощью блока преобразователя напряжение-ток (U/I). Этот ток подается в обмотку компенсации, создавая с ее помощью магнитное поле в объеме датчика, равное и противоположное по направлению измеряемому полю. Выходное напряжение тех же ЦАП после прохождения через фильтр низких частот второго порядка с частотой среза 0,5 Гц поступает на аналоговый выход магнитометра.
Коды, которые установились на ЦАП после завершения процесса компенсации, пропорциональны измеряемым значениям магнитного поля. Они далее поступают через управляющий микроконтроллер и UART/RS-232 преобразователь в микрокомпьютер, посредством которого визуализируются зарегистрированные данные, которые также записываются в файл на жестком диске.
Алгоритм получения одного значения на выходе магнитометра выполняется в такой последовательности:
1. Начальные установки.
2. Коммутируется необходимый магнитный канал, обнуляются рабочие регистры микроконтроллера, i=1, выбирается n из условия Т=20 мс.
3. Синхронизация по срезу импульса частоты возбуждения f1 магнитометра.
4. Синхронизация по срезу импульса второй гармоники частоты возбуждения магнитометра f2.
5. Считывание с АЦП i-го значения напряжения.
6. Повторяют пункты 3, 4, 5 до получения i=4.
7. Накопление данных и вычисление Uj по формуле (1).
8. Запоминание Uj.
9. Проверка того j=n, если нет, повторяем пункты с 2 по 8, если да, идем дальше.
10. По окончанию цикла 20 мс вычисляют среднее значение Uc по формуле (2).
11. Проводят коррекцию значения ЦАП.
После включения магнитометра 27 его АЦП находится в насыщении и реализуется алгоритм начальной компенсации с линейно возрастающим сигналом на выходах первого ЦАП, что обеспечивает достаточно эффективный по скорости алгоритм компенсации, при котором разность между компенсирующим и измеренным полем будет постоянно уменьшаться. Если эта разность уменьшится до величины, меньшей ±2 нТл, АЦП выйдет из насыщения, и алгоритм компенсации изменится: необходимое значение компенсирующего сигнала вычисляется микропроцессором по показаниям АЦП и корректирует значение кода компенсации первого ЦАП. После этого включается другой компенсационный алгоритм, при котором значение кода первого ЦАП остается неизменным (он осуществляет грубую компенсацию данной составляющей магнитного поля), а корректируется лишь код компенсации второго ЦАП по показаниям АЦП. При максимальном значении измеряемого поля ±60000 нТл цена 1 бита первого ЦАП составляет 1,8 нТл, а цена 1 бита второго ЦАП - 0,01 нТл.
Выходное показание магнитометра 27 для каждого из каналов представляется в виде 32-разрядного кода, который состоит из 16 разрядов, снимаемых с ЦАП 78, и 16 разрядов, которые снимаются со второго ЦАП (выходные коды этих ЦАП перекрывают друг друга).
Возбуждение феррозондового датчика осуществляется специальной цепью возбуждения, создающей сигнал с минимальным содержанием второй гармоники. Параллельно напряжения с выходов первого и второго ЦАП, пропорциональные значениям измеряемых компонент индукции магнитного поля, после суммирования и фильтрации поступают на аналоговые выходы магнитометра 27.
При временном исчезновении питания или при сбое микроконтроллера инициируется автоматический перезапуск системы. После перезапуска магнитометр 27 входит в рабочий режим, происходит компенсация внешнего магнитного поля и запись продолжается без вмешательства оператора.
Размещение двух магнитометров 27 на разных горизонтах по глубине на подвижном морском аппарате и на корзине 13 для образцов и вспомогательного оборудования позволяет учесть короткопериодные вариации магнитного поля, которые наблюдаются на всех широтах, существенно осложняясь за Полярным кругом, и их градиенты во времени и амплитуды таковы, что за 1 с поле может измениться более чем на 0,1 гаммы. Кроме того, появляется возможность учета вариаций, вызванных морским волнением и подводными течениями, что позволяет минимизировать ошибки магнитной съемки, что обеспечивается путем выявления тонкой структуры магнитных неоднородностей и определения их параметров.
Учитывая, что опорные геологические разрезы обычно расположены далеко от районов работ, общим требованием к комплексированию является получение данных максимальным числом методов для более уверенной последующей геологической интерпретации. Это позволяет выявить структуры осадочной толщи, гравитационного и магнитного полей с целью тектонического районирования, а также выполнить картирование структур второго порядка, выявить локальные структуры, перспективные в нефтегазоносном отношении.
Сейсмическое, гравиметрическое и гидромагнитное профилирование выполняется с многократным перекрытием отражающих границ.
Средство 22 обработки, документирования и хранения измеренных параметров представляет собой локальную вычислительную систему, построенную на базе центрального компьютера, соединенного с микропроцессорами измерительных средств и устройств первичной обработки информации.
Навигация подвижного морского аппарата для подводных исследований осуществляется посредством гидроакустического лага 16, курсоуказателя 20, включающего гироскопический и магнитный компасы, автопрокладчика 21, ИНС 25, приемника 26 СНС, гидроакустической навигационной системы 19, объединенных в навигационный модуль, который образуют система счисления пути (гидроакустический лаг 16 и курсоуказатель 20), ИНС 25 и приемник 26 СНС, работающие под управлением локальной вычислительной сети.
Варианты комплексирования и коррекции навигационной информации на борту подвижного морского аппарата для подводных исследований включают:
- коррекцию ИНС 25 (в полной конфигурации или в режиме гирокомпаса) от гидроакустического лага 16 (вблизи дна) и приемника 26 СНС (на поверхности моря);
- взаимную коррекцию гироскопического и магнитного компасов курсоуказателя 20 в различных режимах работы подвижного морского аппарата для подводных исследований;
- определение координат посредством гидроакустической навигационной системы 19;
- интегральную обработку информации, вырабатываемой навигационным модулем;
- коррекцию координат по гидроакустическому каналу связи и телеуправления с использованием данных гидроакустической навигационной системы 19 и приемника 26 СНС.
Определение координат (как локальных, так и абсолютных) в автономной системе производится методом счисления пути.
В качестве ИНС 25 может быть использован оптоволоконный гирокомпас «Octans 111» французской фирмы IXSEA или ИНС механического типа на базе динамически настраиваемых гироскопов.
Измеритель 43 скорости и угла дрейфа и курсоуказатель 20, установленные на корзине 13 для образцов и вспомогательного оборудования, предназначены для определения ее скорости движения и курса.
Батометр 42 предназначен для взятия проб воды на разных горизонтах подводного плавания.
Подвижный морской аппарат для морских исследований, как и прототип [1], состоит из легкого 1 корпуса и прочного 2 корпуса. Атомный реактор 3 установлен внутри прочного 2 корпуса, в котором установлены два электромотора 4. Подвижный морской аппарат для морских исследований также оснащен двумя гребными валами 5, четырьмя подруливающими устройствами 6, выдвижными колесами 7, тремя иллюминаторами 8, системой внешнего освещения 9, неподвижными 10 и подвижными 11 телекамерами, многоцелевым захватом-манипулятором 12, конструкции которых аналогичны. В качестве подвижного морского аппарата для морских исследований может быть использована как подводная лодка со штатным навигационным оборудованием, предназначенная к утилизации, так и крупногабаритный самоходный управляемый подводный аппарат.
Состав исследовательского оборудования позволяет выполнять работы, связанные с геофизическими, сейсмическими, геологическими и экологическими исследованиями, а также в обеспечение контроля технического состояния подводных морских коммуникаций.
Источники информации
1. Новинки в мире ВВТ в 2008 году, nvo.ng.ru, 2008-12-26.
2. Тарас А.Е. Атомный подводный флот 1955-2005. М.: ACT, Харвест, 2006, с.41-216. ISBN 985-13-8436-4.
3. Навигационный комплекс автономного подводного робота и особенности его применения в условиях Арктики / Ю.В.Ваулин, А.В.Инзарцев, А.В.Каморный и др. // Подводные исследования и робототехника. Институт проблем морских технологий ДВО РАН, Владивосток, №1(5), 2008, с.24-31.
Подвижный морской аппарат для морских исследований, оснащенный атомным реактором, двумя электромоторами, двумя гребными валами, четырьмя подруливающими устройствами, выдвижными колесами, тремя иллюминаторами, системой внешнего освещения, неподвижными и подвижными телекамерами, многоцелевым захватом-манипулятором, корзиной для образцов и вспомогательных приспособлений, комплексом электронного, компьютерного и гидроакустического оборудования для решения задачи навигации, связи, обнаружения и идентификации подводных объектов, а также подъема объектов на поверхность, при этом комплекс электронного, компьютерного и гидроакустического оборудования для решения задачи навигации и связи включает гидроакустический лаг, гидролокатор бокового обзора, многолучевой эхолот, гидроакустическую навигационную систему, курсоуказатель, автопрокладчик, информационно связанные со средством обработки, документирования и хранения измеренных параметров движения подвижного морского аппарата и окружающей подводной обстановки, отличающийся тем, что корзина для образцов и вспомогательных приспособлений снабжена электронным, компьютерным и гидроакустическим оборудованием, а в комплекс электронного, компьютерного и гидроакустического оборудования для решения задачи навигации, связи, обнаружения и идентификации подводных объектов подвижного морского аппарата для морских исследований дополнительно введены однолучевой эхолот, гидроакустический параметрический профилограф, малогабаритная инерциальная навигационная система, приемник спутниковой навигационной системы, магнитометр, гравиметр и гидрофизический модуль, информационно соединенные с системой обработки информации, которая также соединена кабельным и/или гидроакустическим каналом связи с корзиной для образцов и вспомогательными приспособлениями, которая оснащена магнитометром, гравиметром, блоком сейсмических датчиков, датчиком обнаружения метана, спектроанализатором для измерения спектров комбинационного рассеяния оптического излучения, пенетрометром для выполнения морской грунтовой съемки, блоком контроля радиоактивного загрязнения, блоком гидрохимических измерений, гидрофизическим модулем, каналами спутниковой и гидроакустической связи, промерным эхолотом, гидроакустическим профилографом, батометром, многоцелевым захватом-манипулятором, измерителем скорости и угла дрейфа, курсоуказателем, феррозондовым скважинным иклинометром, информационно соединенных с системой обработки информации подвижного морского аппарата для морских исследований.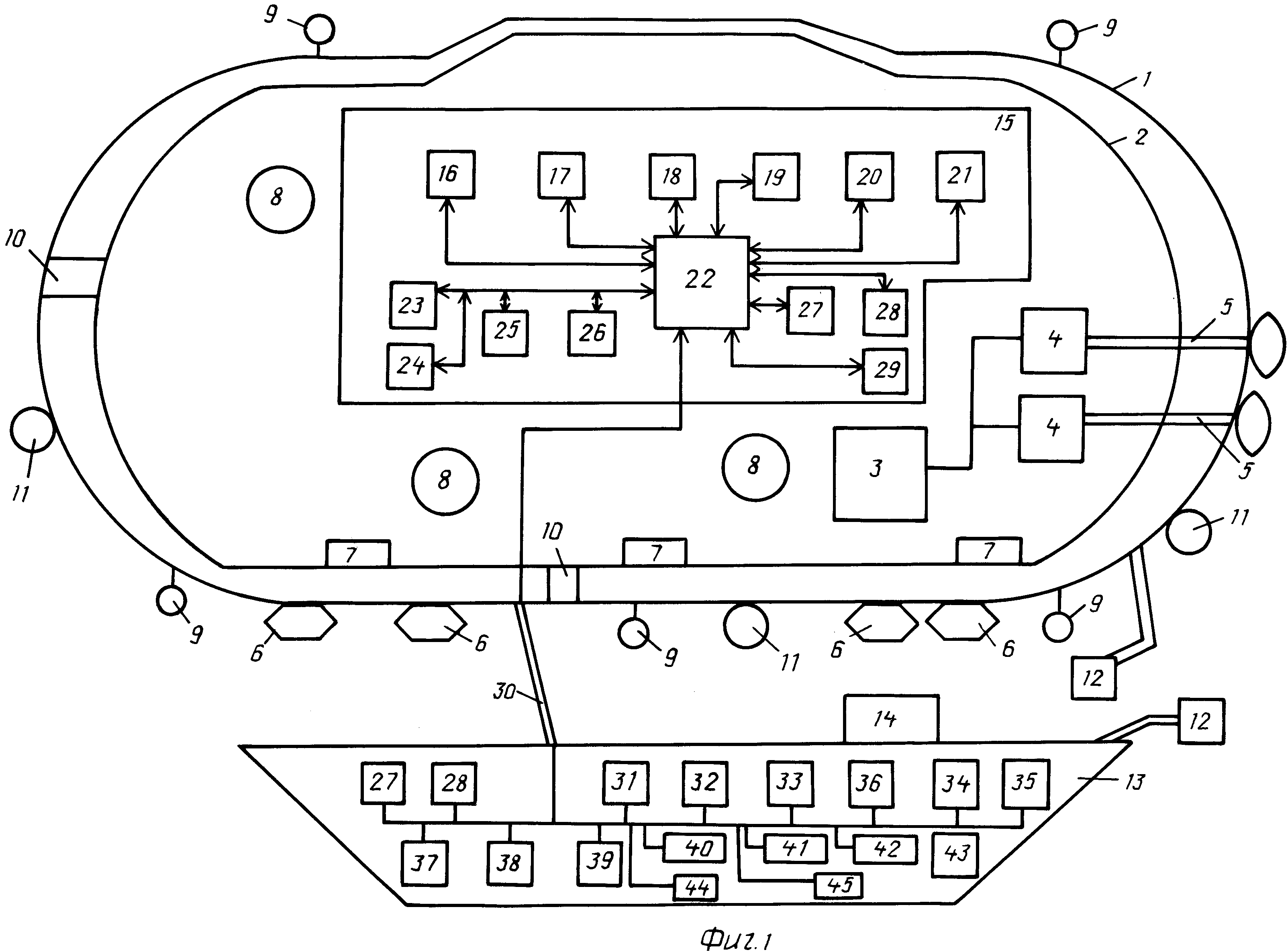
Способ геохимической разведки
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью
Способ картографического отображения двухмерных распределений, заданных в цифровой форме
Способ геохимической разведки
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью
Способ картографического отображения двухмерных распределений, заданных в цифровой форме

