Результат интеллектуальной деятельности: ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к области технических средств судовождения, предназначенных для автоматической проводки судна по заданному курсу, оси фарватера (судового хода) или по заданной траектории движения, преимущественно автономных необитаемых подводных аппаратов, при их использовании в арктических морях.
Известны технические средства судовождения, предназначенные для автоматической проводки судна по заданному курсу, оси фарватера (судового хода) или по заданной траектории движения (патенты RU №2224279 С1, 20.02.2004 [1], RU №2207585 С2, 27.06.2003 [2], RU №2260191 С1, 10.09.2005 [3], US №5523951 A, 04.06.1996 [4], US №5179385 A, 12.01.1993 [5], US №4513378 A, 23.04.1985 [6], RU №2410282 [7]), которые могут быть использованы при проектировании адаптивных авторулевых на судах различных классов. При этом устройства содержат приемоиндикатор спутниковых навигационных систем, электронную картографическую навигационно-информационную систему, авторулевой гирокомпас, рулевую машину.
В состав устройства [7], в отличие от устройств [1-6], дополнительно введен адаптивный вычислитель бокового отклонения судна от заданной траектории движения, что позволяет осуществить автоматизированное определение и учет допустимого бокового отклонения судна от заданной траектории.
Однако известные устройства [1-7] в основном предназначены для их использования на надводных судах, когда обеспечивается бесперебойный ввод в вычислительное устройство значений обсервованных координат, получаемых от спутниковых и радионавигационных систем.
В настоящее время для проведения глубоководных работ и океанографических исследований создаются и используются разнообразные робототехнические средства, включая автономные необитаемые подводные аппараты (АНПА), эффективные в особенности при работе на больших глубинах, подо льдом, в других экстремальных условиях подводной среды. В ряде стран создано значительное число аппаратов данного типа, предназначенных для поиска объектов, съемки рельефа дна, геологоразведки, научных исследований и решения широкого круга прикладных задач.
В навигационном оснащении современных АНПА используются элементы бортовой автономной гидроакустической и спутниковой систем навигации (Навигационный комплекс автономного подводного робота и особенности его применения в условиях Арктики / Ю.В.Ваулин, А.В.Инзарцев, А.В.Каморный и др. // Подводные исследования и робототехника. Институт проблем морских технологий ДВО РАН, Владивосток, №1(5), 2008, с.24-31[8]).
Гидроакустический комплекс навигации и связи [8] включает в себя систему с длинной базой (ГАНС-ДБ), систему с ультракороткой базой (ГАНС-УКБ), систему связи (ГАСС), работающую в режимах телеуправления и телеметрии, системы дальнего и ближнего приведения. В состав всего комплекса входят приемопередающие устройства на аппарате, буксируемый гидроакустический модуль со всем необходимым комплексом антенн и навигационных датчиков, выставляемый с борта обеспечивающего судна, комплект донных приемоответчиков ГАНС-ДБ. Географическая привязка всего пространственно распределенного комплекса обеспечивается с помощью приемников спутниковой навигации, а для экстренной связи и телеуправления, когда аппарат находится на поверхности воды, используются радиомодемы.
В состав бортовой автономной навигационной системы (БАНС) входят инерциальная навигационная система (ИНС), эхолокационная система (ЭЛС), приемник GPS, навигационно-пилотажные датчики (глубиномер, магнитный и гироскопический компасы, датчики крена и дифферента, измерители относительной и абсолютной скорости - вертушечный и доплеровский лаги (ВЛ, ДЛ), датчики угловых скоростей). В зависимости от конфигурации БАНС доставляемая измерителями информация используется для повышения надежности и точности работы системы. Собственно БАНС представляет собой распределенный модуль, который образуют система счисления пути, ИНС и приемник GPS, работающие под управлением локальной вычислительной сети. Автономные навигационные средства в таком составе способны обеспечить осуществление программных миссий и накопление информации о состоянии аппарата в процессе движения.
При этом используются следующие варианты комплексирования и коррекции навигационной информации на борту АНПА:
- коррекция ИНС (в полной конфигурации или в режиме гирокомпаса) от ДЛ (вблизи дна) и СНС (на поверхности моря);
- взаимная коррекция гироскопического и магнитного компасов в различных режимах работы АНПА;
- интегральная обработка информации БАНС и бортового приемника ГАНС-ДБ (УКБ);
- коррекция БАНС по гидроакустическому каналу связи и телеуправления с использованием данных ГАНС и СНС.
Определение координат (как локальных, так и абсолютных) в автономной системе производится методом счисления пути.
ИНС представляет собой оптоволоконный гирокомпас «Octans 111» французской фирмы IXSEA или механическую ИНС на базе динамически настраиваемых гироскопов.
Эхолокационная система включает гидролокатор бокового обзора низкой и высокой частоты, акустический профилограф, датчик глубины. Кроме того, измерительная аппаратура включает измерители температуры и электропроводности морской среды, данные от которых используются для вычисления скорости звука, а также средства фотосъемки морского дна.
Определение координат (как локальных, так и абсолютных) в известной системе производится методом счисления пути. Для этого используются данные измерения вектора скорости, полученные с помощью относительного или абсолютного лага. Составляющие вектора скорости V=(Vx,Vy) относительно выбранной неподвижной системы координат в этих случаях имеют вид:

где Vотн - скорость относительно потока, 
 - осредненные значения продольной и поперечной составляющих скорости, измеряемые доплеровским лагом, ψ, φ - дифферент и курс, измеряемые с помощью ИНС.
- осредненные значения продольной и поперечной составляющих скорости, измеряемые доплеровским лагом, ψ, φ - дифферент и курс, измеряемые с помощью ИНС.
Известный бортовой навигационный комплекс АНПА выполнен в двух конфигурациях, отличающихся типом используемой ИНС. В одной из конфигураций в качестве ИНС используется оптоволоконный гирокомпас «Octans III» французской фирмы iXSEA, в другой - механическая ИНС на базе динамически настраиваемых гироскопов разработки ОАО «НПО Электромеханики» (г.Миасс). В данной системе программным путем обеспечивается коррекция скорости с использованием измерений, поступающих от гидроакустического доплеровского лага. Для совместной обработки данных от внутренних источников (гироскопов, акселерометров) и внешних источников (ДЛ, приемника GPS) используется фильтр Калмана.
При работе АНПА в ограниченном районе или в режиме сопровождения обеспечивающего судна коррекцию автономных координат осуществляют путем совместной обработки информации БАНС и ГАНС или путем передачи по гидроакустическому каналу связи навигационных данных на аппарат наряду с данными телеметрии и командами телеуправления.
Задача БАНС сводится к измерению курса и скорости, вычислению по этим данным проекций скорости на координатные оси и их интегрированию для определения координат. Если используется относительный лаг, то при вычислении учитываются имеющиеся данные о течении (VTx, VTy). Функционирование известной системы может быть описано соотношениями:
где Хс, Yc - координаты, счисленные с помощью БАНС, X(t0), Y(t0) - начальные координаты, вводимые перед пуском АНПА.
Оценки дальностей ri (i=1…n) от аппарата до приемоответчиков с координатами (X., Y.) и оценки координат аппарата (Xr, Yr), которые могут быть получены с помощью ГАНС, связаны уравнениями:

Оценки координат аппарата (Хс, Yc), определенные автономной системой, и оценки координат (Xr, Yr), полученные посредством ГАНС, используются комплексной навигационной системой (КНС) для улучшения результирующих оценок координат (X, Y). Коррекция координат в КНС осуществляется циклически с интервалом обновления данных, равным периоду гидроакустических посылок (откликов).
Вычислительная модель алгоритма КНС содержит следующие программные блоки:
- счисление координат на основе данных от навигационно-пилотажных датчиков;
- селектирование откликов от гидроакустических приемоответчиков;
- вычисление «гидроакустических» координат на основе дальномерной информации;
- коррекция координат и оценка скорости течения.
Входными параметрами системы являются курс от гироскопического или магнитного компасов, дифферент, относительная или абсолютная скорости, предварительная оценка составляющих скорости течения (при использовании относительного лага). Выходными параметрами являются пройденный за цикл путь (dx, dy) и координаты Хс, Yc.
Процесс предварительной обработки сигналов от приемоответчиков ГАНС обеспечивает фильтрацию (селектирование) ложных сигналов, вызванных многолучевостью, и формирование дистанций rki для последующей процедуры вычисления координат Xr, Yr. Обработка сигналов производится с учетом предыстории, т.е. накопленной за предыдущие циклы дальномерной информации. Преимущество алгоритма обработки сигналов на борту АНПА по сравнению с аналогичной процедурой на борту обеспечивающего судна заключается в том, что на АНПА используется информация о текущих счисленных координатах аппарата, на основе которой вычисляются ожидаемые времена откликов toik, где к - это номер шага, i=1…3 - номер приемоответчика. На основе измеренных дистанций rik вычисляются координаты Хr, Yr.
Для коррекции координат формируется итерационный цикл:

Xk->Xck, Yk->Yck,
где dt - период работы ГАНС, К1, К2 - параметры коррекции.
Оценки составляющих скорости течения Утхк; Vтук используются при вычислении координат Хс, Yc, в периоды между циклами коррекции.
Приведенные варианты комплексирования и оценки точности систем проверялись при многократных натурных испытаниях в условиях мелкого и глубокого моря.
Испытания навигационного комплекса проводились в составе АНПА типа «МТ-98» при траекторных измерениях в условиях полигона в одной из бухт залива Петра Великого. В течение 12-часового пуска АНПА выполнял обзорную гидролокационную съемку заданного района и по завершении программы всплыл и произвел GPS обсервацию. Рассогласование координат, счисленных по данным индукционного (магнитного) компаса типа ИД-6, доплеровского лага и скорректированных по отсчетам ГАНС-ДБ, с координатами, полученными от GPS в точке всплытия, составило 35 м.
При 17-часовом пуске АНПА с определением его координат средствами ГАНС, БАНС и GPS в зоне действия трех маяков-приемоответчиков ГАНС со счислением координат по данным гирокомпаса и вертушечного лага позволили свести ошибку счисления БАНС до соответствующего уровня ГАНС-ДБ (15 м).
Также в период испытаний было установлено, что для работы в открытой воде и в условиях умеренных широт АНПА оснащен гидроакустическими средствами навигации и управления, применение которых на Севере в штатных режимах ограничивалось рядом обстоятельств.
Гидроакустическая навигационная система с ультракороткой базой, работа которой не требует постановки маяков-ответчиков, в штатном составе оснащена магнитным датчиком курса, который в полярных широтах дает большую погрешность. Постановка в районе работ донных гидроакустических маяков-ответчиков, возвращаемых или разовых, и развертывание ГАНС с длинной базой в штатном режиме неэффективны из-за дрейфа ледового поля. При значительном удалении приводящей акустической антенны, дрейфующей вместе с судном, резко ухудшаются условия гидроакустического контроля и управления работой с борта носителя. Постановка поверхностных маяков ГАНС ДБ также имеет свои недостатки. Во-первых, для определения текущих координат каждого маяка требуется включение в их состав приемника спутниковой навигации, средств передачи координат в пост управления и ввод этих данных для решения навигационной задачи. Во-вторых, для обеспечения нормальной работы маяков с учетом характера вертикального распределения скорости звука в арктических широтах необходимо устанавливать маяки на глубинах не менее 250-300 м. Размеры полыньи и соответственно измерительной базы маяков ограничены. При этом неучитываемое смещение маяков, устанавливаемых на гибких фалах, приводит к появлению значительных ошибок и сбоев в работе навигации.
При использовании АНПА в высоких широтах были использованы гирогоризонткомпас типа «Octans» и гидроакустический доплеровский лаг. В итоге для навигационного сопровождения АНПА была реализована следующая схема.
По контуру полыньи, выбранной для пуска и всплытия АНПА, устанавливались три маяка-ответчика ГАНС ДБ с максимально возможными дистанциями между ними. Координаты маяков определялись в момент их постановки и непосредственно перед стартом АНПА, а затем вводились в навигационную программу судового комплекса в качестве постоянных данных. Положения маяков периодически уточнялись, и обновленные данные далее использовались для расчетов. Текущее положение судна и соответственно выставляемой судовой антенны определялось штатным приемником спутниковой навигации. С учетом получаемых данных определялся текущий дрейф ледового поля и оценивалось положение измерительной базы маяков.
Фиксировались координаты стартовой точки АНПА на поверхности. Далее по данным ГАНС ДБ определялись координаты точки старта АНПА у дна и соответственно точки начала координат работы бортовой навигационной системы. При выполнении исследовательских работ текущая траектория движения АНПА счислялась по данным бортовых датчиков абсолютной скорости, курса, глубины, крена, дифферента.
По данным телеметрии, передаваемой с борта АНПА по гидроакустическому каналу связи, выполнялось счисление траектории движения АНПА в реальном времени на борту обеспечивающего судна. На навигационном планшете параллельно отображались траектория дрейфа судна с базой маяков и траектория движения АНПА относительно дрейфующей базы маяков. Накапливаемая ошибка системы счисления корректировалась по ряду дискретных точек, в которых расчет местоположения АНПА производился по данным ГАНС ДБ с использованием уточненных координат маяков.
После завершения исследовательских работ АНПА выполнял процедуру автоматического выхода на судовой гидроакустический антенный модуль. Наведение осуществлялось при расположении антенного модуля значительно выше АНПА (рабочая глубина антенны составляла 400 м, а АНПА - около 1600 м, наклонная дальность - более 5 км). В таких условиях производилось трехэтапное приведение АНПА к антенне.
На первом этапе АНПА двигался к приводящей антенне, находясь у дна. При таком движении условия приема акустических сигналов изменялись постепенно и незначительно. Во-вторых, движение у дна позволяло использовать доплеровский лаг. При этом счисление производилось с большей точностью, а время поисковых движений - сокращалось. На втором этапе при выходе аппарата на траверс антенны производилось спиралеобразное всплытие аппарата на глубину 50 м. Одновременно на эту же глубину поднималась приводящая антенна. Затем производилось наведение аппарата на антенну на горизонте 50 м. При попадании аппарата в окрестность антенны осуществлялся переход на ручное наведение с использованием акустического канала телеуправления.
На заключительной фазе приведения перед всплытием положение АНПА в полынье контролировалось по данным о дальностях аппарата от антенного модуля и каждого маяка. Команды на завершающие процедуры всплытия (подъем с глубины 20 м, а затем с глубины 5 м) подавались при получении минимальной дальности до судовой антенны (не более 20-25 м) и нахождении АНПА в центре полыньи (определяемом по дальностям АНПА от маяков), что позволило определять текущее положение АНПА, управлять им, контролировать ход выполнения миссии и обеспечивать точный выход аппарата в полынью для всплытия. На заключительной фазе всплытия АНПА после 22 часов автономной работы был обеспечен контроль прямой дальности АНПА от судовой антенны и установленных маяков. Ошибка измерения дальности в этот момент не превышала 10 м, а при выходе на поверхность АНПА находился в 10-15 м от борта носителя и 20-30 м от судовой антенны.
На основании анализа полученных данных была выполнена оценка точности навигационной привязки. В ходе запуска в течение 22 часов суммарная нескорректированная ошибка бортовой навигационной системы, определенная как расхождение координат точки всплытия, счисленных бортовой навигационной системой, и координат, полученных при обсервации GPS, составила 1370 м или около 60 м/ч. Эта ошибка была накоплена и формировалась за счет следующих источников:
- ошибки определения географических координат для стартовой точки начала исследовательских работ на дне. При этом координаты точки старта на поверхности устанавливались достаточно точно, но при погружении (около 50 мин) АНПА его положение контролировалось ГАНС, использующей дрейфующую базу маяков. Расчетное положение стартовой точки по данным ГАНС корректировалось путем компенсации дрейфа базы маяков с ошибкой около 50 м;
- ошибки бортовой навигационной системы при счислении пути. По данным экспериментов, проведенных во время отладки системы, суммарная ошибка счисления не превышала 1% от пройденного пути, что составляет при скорости 1 м/с не более 50 м/ч;
- ошибки счисления пути при всплытии АНПА и во время приведения на глубинах, исключающих возможность работы доплеровского лага. При этом данные о скорости аппарата вырабатывались относительным лагом, точность которого существенно ниже точности доплеровского лага. Общая продолжительность работы системы счисления в режиме приведения была не менее 3 часов, что также сказалось на величине суммарной ошибки.
Основными недостатками известного интегрированного комплекса навигации и управления движением являются следующие технические решения.
Использование буксируемого антенного модуля с приемопередающими блоками системы связи и телеуправления, приемопередающими блоками системы ГАНС ДБ, приемными блоками системы ГАНС УКБ, что требует его стабилизации при воздействии на него внешних условий, а также наличие водного пространства, свободного ото льда.
При реализации инерциального счисления используют ИНС полуаналитического типа на поплавковых гироскопах. При этом в состав ИНС входят гироскопические системы, обеспечивающие стабилизацию платформ и измерение широты, и акселерометры, измеряющие ускорения АНПА в трех плоскостях.
При этом, наличие чувствительных элементов этих двух типов и использование относительного лага в качестве демпфирующего элемента приводит к возникновению погрешностей выработки координат со сложной структурой (В.А.Михальский, В.А.Катенин. Метрология в кораблевождении и решение задач навигации. СПб., «Элмор», 2009, с.156.). Погрешности выработки широты (и курса инерциального) по характеру их проявления складываются из суточной, шулеровской, случайной составляющих и погрешности, обусловленной воздействием подводных течений. В канале выработки долготы (и курса гироазимутального) к этим составляющим добавляется уход (тренд) долготы с почти постоянной скоростью на текущем интервале времени между коррекциями координат по данным СНС или ГАНС. В процессе коррекции в навигационном модуле рассчитываются и вводятся в ИНС поправки координат и поправка на скорость постоянного ухода долготы. При этом существенные соотношения погрешностей ИНС вынуждают применять сглаживание или фильтрацию случайной и шулеровской составляющих. Сглаживание на основе внутренней информации ИНС малоэффективно, поэтому реализуют фильтрацию с использованием дополнительной информации о скорости АНПА от относительного вертушечного лага (постоянно) или от абсолютного гидроакустического лага (периодически). В процессе фильтрации хорошо подавляются случайная и частично-шулеровская составляющие. Но взамен их к суточной и остаточной шулеровской погрешности добавляется нордовая составляющая сноса АНПА подводным течением. Это происходит за счет того, что демпфирование по относительной скорости приводит к частичной компенсации вместе со случайной погрешностью ИНС и скорости подводного течения, которая поэтому не полностью учитывается при расчете перемещения АНПА. В результате этого снос АНПА течением в той или иной мере входит в погрешность ИНС (В канале долготы в состав погрешностей вносится часть восточной составляющей сноса течением).
Кроме того, использование в качестве судна обеспечения надводного судна с буксируемым антенным модулем (приводным маяком) в ледовых условиях существенно ограничивает радиус действия АПНА наличием полыньи. Так как проведение сеанса связи возможно только при стоянке обеспечивающего судна на якоре. При этом обсервованные координаты посредством гидроакустической навигационной системы определяют по отношению к фиксированной точке (антенному модулю), размещенному на буксируемом средстве или на морском дне методом «крюйс-дальности», так как используется только один маяк-ответчик. Запрос и прием сигнала осуществляется в три различных момента времени из трех точек, в каждой из которых определяется наклонная дальность. При известной скорости АПНА по этим данным вычисляются координаты точки (φ0, λ0), в которой АПНА находится в момент времени t2. Метод «крюйс-дальности» имеет невысокую точность, так как ошибка счисления при движении АПНА между тремя точками вносит дополнительную погрешность в определение координат. Кроме того, ввиду направленности система работает при относительно небольших углах крена и дифферента.
Использование трех донных маяков-ответчиков также не решает задачу определения координат по ГАНС, так как энергетический потенциал системы невелик, и с учетом ограниченной мощности сигналов от маяка-ответчика и шумов моря определение координат возможно на расстоянии до 10 км от маяков-ответчиков (Ю.А.Лукомский, В.Г.Пешехонов, Д.А.Скороходов. Навигация и управление движением судов. СПб. «Элор», 2002, с.106-107).
Кроме того, дискретный во времени характер поступления информации от навигационных спутников предполагает использование счисления между обсервациями, порождающего ошибки, которые превышают погрешность спутниковой навигационной системы. Относительно невысокая точность определения координат и достаточно длительное время навигационного определения оказываются неприемлемыми для приложений, таких как обеспечение позиционирования АНПА, выполнение детальной съемки морского дна на шельфе.
Также необходимо учитывать, что измеряемые и определяемые параметры отсчитываются в различных системах пространственных координат, измерения ведутся в системе навигационного искусственного спутника Земли (НИСЗ), в то время как результаты навигационных определений фиксируются в системах, связанных с Землей (с ее центром в геоцентрической системе или с ее поверхностными точками в топоцентрических системах). Поэтому необходимо приводить эти данные к единой системе отсчета или, иными словами, согласовывать начала отсчета пространственных координат. Ввиду того, что орбитальное движение НИСЗ возмущается рядом факторов (таких как нецентральность поля тяготения Земли, притяжение Солнца и Луны, давление солнечного света и т.д.), то начала отсчета расходятся непрерывно, поэтому согласование необходимо проводить в каждом навигационном сеансе, а для этого АНПА должен всплывать при наличии полыни во льдах, которой в период сеанса может не оказаться.
Кроме того, формируемые алгоритмы управления для рулевых устройств по данным навигационных средств не обеспечивают необходимое быстродействие (близкое к оптимальному) АНПА по глубине, дифференту и курсу с выполнением требований по стабилизации параметров при обеспечении точности съемки рельефа морского дна (2-5 м для районов с глубинами до 100 м).
Задачей заявляемого технического решения является повышение точности определения координат АНПА и обеспечение стабилизации параметров АНПА по глубине, дифференту и курсу.
Поставленная задача решается за счет того, что в интегрированном комплексе навигации и управления движением автономного необитаемого подводного аппарата, включающем судовой пост управления движением автономного необитаемого подводного аппарата с блоком гидроакустического телеуправления, размещенный на обеспечивающем судне, при этом обеспечивающее судно оснащено приемником спутниковой навигационной системы, системой единого времени, судовой аппаратурой управления, обработки и отображения информации, автономный необитаемый подводный аппарат оснащен приемопередающими блоками гидроакустической системы навигации с длинной базой, системой гидроакустического телеуправления и связи, навигационно-пилотажными датчиками, локальной вычислительной сетью, гидроакустическим доплеровским лагом, гирокомпасом или/и инерциальной навигационной системой, приемником спутниковой навигационной системы, магнитным компасом, измерителем глубины, системой управления рулевыми механизмами, включающей вычислитель, а еще автономный необитаемый подводный аппарат оснащен аппаратурой для выполнения гидрологических исследований, включающей гидролокатор бокового обзора, профилограф, измерители температуры и электропроводности морской среды, фотокамеры, в систему управления рулевыми механизмами введены каналы выработки сигналов стабилизации крена, дифферента, глубины и курса, дополнительно введены многолучевой эхолот, циклический скоростемер, акустический доплеровский измеритель профиля течений, гидроакустический доплеровский лаг выполнен с возможностью работы по сигналам объемной реверберации, гидроакустическая система навигации с длинной базой содержит не менее восьми донных маяков-ответчиков, гирокомпас выполнен в виде корректируемого гирокомпаса, построенного на базе динамически настраиваемого гироскопа и кварцевых акселерометров, инерциальная навигационная система построена на основе прецизионного гироскопа с электростатическим подвесом ротора, обеспечивающее судно снабжено приемо-передающим блоком гидроакустической системы навигации с длиной базой.
Новые отличительные признаки, заключающиеся в том, что в систему управления рулевыми механизмами введены каналы выработки сигналов стабилизации крена, дифферента, глубины и курса, дополнительно введены многолучевой эхолот, циклический скоростемер, акустический доплеровский измеритель профиля течения, гидроакустический доплеровский лаг выполнен с возможностью работы по сигналам объемной реверберации, гидроакустическая система навигации с длинной базой содержит не менее восьми донных маяков-ответчиков, гирокомпас выполнен в виде корректируемого гирокомпаса, построенного на базе динамически настраиваемого гироскопа и кварцевых акселерометров, инерциальная навигационная система построена на основе прецизионного гироскопа с электростатическим подвесом ротора, обеспечивающее судно снабжено приемопередающим блоком гидроакустической системы навигации с длиной базой, позволяют исключить недостатки, присущие прототипу.
Сущность предлагаемого технического решения поясняется чертежами (фиг.1…10).
Фиг.1. Структурная схема интегрированного комплекса навигации и управления движением автономного необитаемого подводного аппарата. 1 - обеспечивающее судно, снабженное постом 2 управления движением автономного необитаемого подводного аппарата с блоком гидроакустического телеуправления 3 и оснащенное приемником 4 спутниковой навигационной системы, системой единого времени 5, аппаратурой управления, обработки и отображения информации 6, приемо-передающим блоком 7 гидроакустической системы навигации с длиной базой, системой управления 8 АНПА, 9 - автономный необитаемый подводный аппарат, оснащенный приемопередающими блоками гидроакустической системы навигации 10 с длинной базой, системой гидроакустического телеуправления и связи 11, навигационно-пилотажными датчиками 12, локальной вычислительной сетью 13, гидроакустическим доплеровским лагом 14, гирокомпасом 15 или/и инерциальной навигационной системой 16, приемником 17 спутниковой навигационной системы, магнитным компасом 18, измерителем глубины 19, системой управления 20 рулевыми механизмами, включающей вычислитель 21, аппаратурой для выполнения гидрологических исследований 22, включающей гидролокатор бокового обзора 23, профилограф 24, измерители температуры 25 и электропроводности 26 морской среды, фотокамеры 27, акустический доплеровский измеритель течений 28, многолучевой эхолот 29, комплект 30 маяков-ответчиков 31 гидроакустической системы навигации с длинной базой, циклический скоростемер 32.
Фиг.2. Блок-схема поста управления движением автономного необитаемого подводного аппарата. Пост управления движением автономного необитаемого подводного аппарата (АНПА) включает пульт 33 управления глубиной при отсутствии скорости хода АНПА; прибор отображения информации 34 о рекомендованных значениях курса и глубины; указатель крена 35; указатель курса 36; указатель положения вертикального руля 37; указатель положения большого кормового горизонтального руля 38; указатель положения носового горизонтального руля 39; указатель положения малого кормового горизонтального руля 40; указатель глубины (0…60 м) 41; указатель глубины под килем 42; указатель дифферента 43; пульт управления движением 44 АНПА в нормальных режимах эксплуатации; пульт управления движением 45 АНПА в аварийных ситуациях, индикаторную панель 46 для отображения заданных и текущих навигационных параметров АНПА, картографической и топографической информации.
Фиг.3. Структурная схема системы управления, размещенная на АНПА. Структурная схема системы управления, размещенная на АНПА включает блок управления 47, блок усилителей 48, измеритель глубины 19, навигационно-пилотажные датчики 12, включающие измерители крена 49 и дифферента 50, приборы обратной связи 51 носового горизонтального руля, соединительные коробки 52, золотник 53 аварийного управления, золотник 54 управления, приборы обратной связи 55 вертикальных рулей, гидропривод 56 с краном манипулятором, приборы обратной связи 57 системы стабилизации без хода, гидравлический привод 58 вертикальных рулей 59, гидравлический привод 60 горизонтальных рулей 61, предсказатель 62, золотник 63 переключения, прибор обратной связи 64 кормового горизонтального руля 65, цистерны 66 стабилизации без хода.
Фиг.4. Схема рулевых устройств АНПА. 67, 68, 69 - стабилизаторы, 70, 71 - горизонтальный руль правого и левого бортов соответственно, 72, 73 - верхняя и нижняя секции вертикального руля соответственно, 74 - внутренние секции вертикального руля, 75 - закрылки горизонтальных рулей, 76, 77 - левый и правый носовые горизонтальные рули, соответственно.
Фиг.4а. Схема горизонтальных рулевых устройств.
Фиг.4б. Схема вертикальных рулевых устройств.
Фиг.4в. Схема носовых горизонтальных рулей.
Фиг.5. Функциональная схема системы управления движением. Позициями обозначены: АНПА-9, рули 78; датчики соответственно заданных значений дифферента 79, курса 80, глубины погружения 81, датчики обратной связи текущих значений глубины погружения 82, курса 83, дифферента 84, скорости 85, положения горизонтальных рулей 86, положения вертикальных рулей 87, суммирующее устройство 88, вычислитель 89, блок суммарного электрического сигнала управления 90, электрогидравлический преобразователь 91.
Фиг.6. Функциональная схема канала автоматического управления движением АНПА по курсу. АНПА-9, вертикальный руль 59, датчик заданного курса 80, датчики обратной связи текущих значений положения вертикальных рулей 87, курса 83, суммирующее устройство 88, вычислитель 89, блок суммарного электрического сигнала управления 90, электрогидравлический преобразователь 91.
Фиг.7. Функциональная схема вычислительного устройства скорости изменения курса. Блок формирования изменения курса вычислителя 89 включает суммирующее устройство 92, на которое подаются значения заданного и фактического курса, блок 93 формирования скорости изменения курса, блок 94 формирования суммарной ошибки, суммирующее устройство 95, блоки нелинейности 96 и 97, блок ограничения 98. Блок нелинейности 96 и блок ограничения 98 образуют линейный ограничитель 99.
Фиг.8. Функциональная схема канала автоматического управления АНПА по глубине. АНПА-9, схема ввода заданных значений дифферента и глубины погружения 100, суммирующее устройство 101, на которое поступают заданные и текущие значения дифферента и глубины погружения, микропроцессор 102, блок формирования суммарного сигнала управления 103, электрогидравлический преобразователь 104, горизонтальные рули 76 и 77.
Фиг.9. Функциональная схема вычислительного устройства канала управления АНПА по глубине. Суммирующее устройство 105, блоки нелинейности 106 и 107, выходной сумматор 108, включающий блоки нелинейности 109 и 110, блок формирования скорости изменения дифферента 111, блок формирования скорости изменения глубины 112, суммирующее устройство 113.
Фиг.10. Структурная схема циклического скоростемера. Циклический скоростемер представляет собой замкнутое через морскую воду 114 акустическое кольцо синхронизации, образованное двумя акустическими преобразователями 115 (излучающий преобразователь) и 116 (приемный преобразователь), усилителем 117 и импульсным генератором 118, запускаемым по сигналам с выхода усилителя 117. Частота следования импульсов в подобном кольце пропорциональна скорости звука в воде. В частотном дискриминаторе 119 эта частота следования сравнивается с частотой излучаемого гидроакустическими средствами (лага, или эхолота, или профилографа, или гидролокатора бокового обзора), который представляет собой гармонику сигнала в кольце. При изменении скорости звука в воде на выходе частотного дискриминатора 119 появляется управляющее напряжение того или иного знака, изменяющее соответствующим образом частоту излучаемого гидроакустическим средством сигнала. При этом автоматически поддерживается постоянной длина волны колебаний, излучаемых тем или иным гидроакустическим средством. Делитель частоты 120 соединен своим входом с выходом генератора 121, управляемого напряжением, который своим входом соединен с выходом частотного дискриминатора 119, а своим выходом соединен с усилителем мощности 122 излучаемого сигнала.
Пример реализации предлагаемого технического решения.
Автономный необитаемый подводный аппарат 9 оснащен приемопередающими блоками гидроакустической системы навигации 10 с длинной базой, системой гидроакустического телеуправления и связи 11, навигационно-пилотажными датчиками 12, локальной вычислительной сетью 13, гидроакустическим доплеровским лагом 14, гирокомпасом 15 или/и инерциальной навигационной системой 16, приемником 17 спутниковой навигационной системы, магнитным компасом 18, измерителем глубины 19, системой управления 20 рулевыми механизмами, включающей вычислитель 21, аппаратурой для выполнения гидрологических исследований 22, включающей гидролокатор бокового обзора 23, профилограф 24, измерители температуры 25 и электропроводности 26 морской среды, фотокамеры 27, акустический доплеровский измеритель течений 28, многолучевой эхолот 29, комплект 30 маяков-ответчиков 31 гидроакустической системы навигации с длинной базой, циклический скоростемер 32.
Навигационно-пилотажные датчики 12, гидроакустический доплеровский лаг 14, гирокомпас 15 или/и инерциальная навигационная система 16, приемник 17 спутниковой навигационной системы, магнитный компас 18, измеритель глубины 19, акустический доплеровский измеритель течений 28, многолучевой эхолот 29, бортовые приемопередатчики гидроакустической системы навигации с длинной базой и циклический скоростемер 32 образуют навигационный модуль и представляют собой промышленные изделия.
Гидроакустическая навигационная система с длинной базой содержит навигационную базу из 8-ми гидроакустических приемоответчиков с различными частотами ответа и размещенный на объекте навигации гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками.
Комплект из 8-ми гидроакустических приемоответчиков обусловлен ограничениями по интерфейсному и программному обеспечению.
Приемная гидроакустическая антенна состоит из четырех гидрофонов, каждая секция антенны состоит из двух одноканальных и одного многоканального модуля, установленных на линейном несущем кронштейне, выполненном перфорированным, антенны приемников выполнены в форме сферической поверхности и размещены на стальной пластине.
Маяки-ответчики 31 могут быть расположены как по трасе исследований, так и по исследуемой площади морского дна. Маяки-ответчики могут быть расположены в произвольном порядке. На обеспечивающем судне 1 также размещен приемопередающий блок 7 гидроакустической системы навигации с длиной базой, что позволяет определять координаты АНПА 9, как относительно маяков-ответчиков 31, так и обеспечивающего судна 1, а также относительно маяков-ответчиков 31 и обеспечивающего судна 1.
При этом достигается технический результат, заключающийся в повышении точности и надежности при обеспечении навигации подводных объектов, когда использование спутниковой навигационной системы затруднено.
Аналогом гидроакустической навигационной системы с длинной базой и М маяками-ответчиками является гидроакустическая навигационная система, приведенная в патенте RU №2371738.
В зависимости от размеров АНПА, для определения инерциальных параметров, возможно применение гирокомпаса типа «Гюйс», который представляет собой корректируемый гирокомпас, построенный на базе динамически настраиваемого гироскопа и кварцевых акселерометров (Ю.А.Лукомский, В.Г.Пешехонов, Д.А.Скороходов. Навигация и управление движением судов. СПб, «Элор», 2002, с.55) или/и инерциальную навигационную систему (ИНС), построенную на поплавковых или прецизионных гироскопах с электростатическим подвесом ротора (Ю.А.Лукомский, В.Г.Пешехонов, Д.А.Скороходов. Навигация и управление движением судов. СПб, «Элор», 2002, с.77).
Для технической реализации предлагаемого изобретения использована корректируемая ИНС, которая, используя информацию гироскопов и акселерометров, обеспечивает автономную выработку навигационных и динамических параметров движения АНПА, используя корректирующую информацию спутниковой навигационной системы (СНС) о координатах места объекта. В сложных условиях эксплуатации спутниковой системы, при сокращении орбитальной группировки космических аппаратов, реализуется резервный режим коррекции инерциальной системы по данным первичных измерений. Система работает таким образом, что по данным внешней информации и навигационных данных ИНС формируются сигналы коррекции системы, что повышает точность навигационных определений в штатных условиях функционирования, например в условиях сбоев работы ГАНС.
В качестве измерителя скорости АНПА применен гидроакустический корреляционный лаг, измерение скорости которым можно производить как относительно морского дна, так и относительно масс воды по сигналам объемной реверберации, что исключает необходимость использования относительного лага, имеющего низкую точность измерения скорости.
Аналогом гидроакустического корреляционного лага является лаг типа «SAL-ACCOR» (Судовые измерители скорости. Под ред. Хребтова А.А., Л., Судостроение, 1978, с.159-166).
Для измерения скорости течения на АНПА-9 установлен акустический доплеровский измеритель профиля течения 28 с диапазоном измерения скорости до 100 см/с и высоты профиля не менее 100 м, а для измерения скорости звука в морской воде установлен циклический скоростемер 32 (Судовые измерители скорости. Под ред. Хребтова А.А., Л., Судостроение, 1978, с.133), что исключает необходимость определения скорости звука в морской воде расчетным путем по косвенным данным.
Аналогами гидроакустических средств зондирования (многолучевой эхолот, профилограф, гидролокатор бокового обзора) являются аналогичные средства, приведенные в кн. Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. Ростов-на-Дону, «Ростиздат», 2004. - 400 с.
Система управления движением АНПА (СУД АНПА) предназначена для автоматического, дистанционного и аварийного управления движением АНПА по курсу, глубине, а также для управления его дифферентом.
Управление маневрированием АНПА и его пространственное движение условно разделяют на движение в вертикальной и горизонтальной плоскостях. В качестве критерия динамической устойчивости используют критерий:

где Cy,  - гидродинамические коэффициенты момента подъемной силы и момента демпфирования, соответственно;
- гидродинамические коэффициенты момента подъемной силы и момента демпфирования, соответственно;
где М - масса АНПА; D - полное водоизмещение; L - длина АНПА.
АНПА динамически устойчив при отрицательной величине коэффициента х. При х=0 АНПА динамически нейтрален. При x>0 ПА динамически неустойчив. Высокие скорости движения и сравнительно небольшие глубины погружения современных АНПА обеспечивают его динамическую устойчивость при движении в вертикальной плоскости. При движении в горизонтальной плоскости явление неустойчивости АНПА не грозит пагубными последствиями, такими как возможность его провала за рабочую глубину. Однако АНПА обладают инверсной скоростью, при которой АНПА не управляется кормовыми горизонтальными рулями (ГР). В этом случае центр давления ГР проходит через центр балансировки. При сравнительно высоких скоростях хода положительная перекладка рулей приводит к погружению АНПА. На малых скоростях та же перекладка становится причиной всплытия АНПА. Для современных АНПА инверсная скорость обычно составляет 1,5…4 уз. Для носовых ГР инверсная скорость не имеет значения, т.к. они расположены вне центра перемещения балансировки.
В ходе проведения исследовательских работ с использованием АНПА в процессе пространственной циркуляции совершается маневрирование АНПА по курсу, с одновременным движением в поперечном плоскости по крену. При этом при появлении угла дрейфа возникает поперечное обтекание АНПА, при котором появляются возмущающие гидродинамические силы в вертикальной плоскости, меняются условия балансировки АНПА и возникает необходимость стабилизации АНПА по глубине.
Также была выявлена структурная неустойчивость движения АНПА, установлена существенная зависимость кренящих моментов от знака балансировочных углов дифферента и кормовых горизонтальных рулей при циркуляции, что требует координированного управления перьями вертикальных и горизонтальных рулей АНПА при пространственной циркуляции. При циркуляции в подводном положении современные АНПА имеют внутренний крен, вызванный превышением центра давления над центром тяжести из-за наличия выступающих конструктивных элементов корпуса, например рубки. При этом, угол крена АНПА может достигать 30…35° в начальный период выполнения маневра и 1…10° на установившейся циркуляции.
При пространственном маневрировании АНПА осуществляется одновременный переход по курсу и глубине при координированном управлении креном. Основной критерий при пространственном маневрировании - быстродействие переходных процессов по курсу и глубине при наложении ограничений на текущие координаты по углу крена и дифферента. Кроме того, требуется обеспечить выход АНПА на заданную глубину и курс с определенной величиной перерегулирования, не превышающей заданные параметры. Натурные испытания АНПА показали, что наблюдается существенное влияние кренящих моментов как на устойчивость процесса стабилизации АНПА, так и на динамику пространственных маневров. Координированное управление рулями при пространственном маневрировании позволило повысить на 40…60% быстродействие управления АНПА для сильных маневров по глубине, углы дифферента АНПА при подводном маневрировании достигают 20…30°, а скорость погружения или всплытия 6…9 м/с.
Возможны три случая маневрирования ПА по курсу, в которых предполагается:
1) наличие запаса по мощности ГЭУ;
2) отсутствие запаса по мощности ГЭУ;
3) движение на минимальной скорости хода.
В первом случае необходимо увеличение скорости до значения, обеспечивающего оптимальное маневрирование АНПА с учетом ограничений на углы перекладки. Во втором случае требуется снижение скорости хода до значения, соответствующего максимально возможной угловой скорости циркуляции при ограничении на кладку нижнего пера ВР. В третьем случае возникает необходимость форсированного увеличения скорости хода АНПА при циркуляции с одновременным выходом в конце переходного периода по заданным значениям курса и скорости хода. Эти мероприятия обеспечивают сокращение времени выхода на заданный курс на 30…50%. В целом координированное управление рулями и оборотами главного турбозубчатого агрегата (ГТЗА) существенно повышает маневренные характеристики АНПА.
При движении АНПА на малых скоростях хода в целях обеспечения его форсированного выхода на глубину, позволяющую использовать спутниковый канал связи, возникает задача совместного управления рулями и цистернами вспомогательного и специального балласта. Управление рулями строится по бездифферентной схеме, при которой кормовые рули стабилизируют дифферент АНПА, а носовые рули, совместно с управлением плавучестью балластных цистерн, создают подъемную или топящую силу для маневрирования АНПА по глубине. Совместное управление плавучестью и рулями позволило повысить быстродействие АНПА при управлении глубиной погружения и в целом существенно улучшить его маневренные характеристики на малых скоростях.
Стабилизация невозмущенного движения включает режим плавания у дифферентованного АНПА на больших глубинах, где практически отсутствует влияние взволнованной поверхности моря, придонных течений. В целом, в этом режиме плавания влияние внешних возмущающих воздействий не соизмеримо с эффективностью регулирующих органов, в качестве которых используются горизонтальные и вертикальные рули с разрезной конструкцией баллера. В данном режиме плавания осуществляется автоматическая стабилизация угловых пространственных координат движения АНПА: крена, дифферента, курса и глубины погружения. В зависимости от скорости хода АНПА рули подключаются к управлению в различном сочетании, определяемом условиями эксплуатации АНПА. В частности, стабилизация курса осуществляется на максимальных скоростях хода в подводном положении с использованием верхнего пера руля, либо верхнего и нижнего пера руля, в надводном положении - с использованием нижнего пера вертикального руля.
Стабилизация крена осуществляется при использовании кормовых, носовых и вертикальных рулей раздельно и совместно со стабилизацией курса и глубины погружения. Стабилизация дифферента осуществляется с использованием кормовых больших и малых горизонтальных рулей. Стабилизация глубины погружения осуществляется с использованием больших и малых кормовых горизонтальных рулей совместно с носовыми рулями. Бездифферентное управление АНПА обеспечивается использованием носовых рулей по глубине, а кормовых рулей по дифференту. На средних и малых скоростях хода на АНПА начинают влиять внешние возмущения, такие как обжатие корпуса, изменение плотности морской воды, течения моря и т.п., приводящие к раздифферентовке АНПА по силе и моменту.
При плавании на небольшой глубине от поверхности воды серьезной проблемой становится обеспечение устойчивой стабилизации глубины и дифферента АНПА. Это обусловлено влиянием взволнованной поверхности моря, воздействием экранных сил, зависящих от глубины погружения, скорости хода и курсового угла движения к направлению распространения волн, существенно меняющих устойчивость стабилизации АНПА [3.4]. В связи с неопределенностью спектральных характеристик волнения, значений положительной нормальной силы, способствующей выбрасыванию АНПА на поверхность, при всплытии на перископную глубину практически невозможна точная дифферентовка АНПА по силе и моменту. Это приводило к срыву режима стабилизации, подвсплытию АНПА, оголению винтов при изменении дифферента. При этом исследования показали, что введение носовых горизонтальных рулей для стабилизации АНПА на перископной глубине обеспечивает устойчивость стабилизации АНПА в целом. Однако влияние волновых помех приводит к уменьшению компенсационных возможностей носовых рулей, и устойчивость резко снижается. При волнении ухудшается управляемость АНПА в надводном положении и, в частности, при изменении курса возникают большие перерегулирования относительно нового курса.
Специфика применения способа всплытия "без хода" для приледнения АНПА в высокоширотных акваториях относит этот режим плавания к числу наиболее важных.
Особенность построения алгоритмов управления заключается в необходимости обеспечения требуемого запаса устойчивости стабилизации при существенном влиянии сил обжатия прочного корпуса АНПА, всплытия с регулируемой скоростью изменения глубины погружения и учета дифферентующих моментов АНПА, вызванных смещением плеча цистерн управления плавучестью относительно его центра тяжести.
Для управления движением АНПА на обеспечивающем судне организуется пост управления движением автономного необитаемого подводного аппарата (АНПА), который включает (фиг.2) пульт 33 управления глубиной при отсутствии скорости хода АНПА; прибор отображения информации 34 о рекомендованных значениях курса и глубины; указатель крена 35; указатель курса 36; указатель положения вертикального руля 37; указатель положения большого кормового горизонтального руля 38; указатель положения носового горизонтального руля 39; указатель положения малого кормового горизонтального руля 40; указатель глубины (0…60 м) 41; указатель глубины под килем 42; указатель дифферента 43; пульт управления движением 44 АНПА в нормальных режимах эксплуатации; пульт управления движением 45 АНПА в аварийных ситуациях, индикаторную панель 46 для отображения заданных и текущих навигационных параметров АНПА, картографической и топографической информации.
Маневрирование АНПА в пространстве при наличии скорости хода обеспечивают рулевые комплексы. Для более эффективности управления рули максимально удалены от корпуса АНПА. В зависимости от места расположения рули могут быть кормовыми, носовыми, средними и рубочными (при наличии рубки). В свою очередь, кормовые рули подразделяются на вертикальные и горизонтальные. Вертикальные рули обеспечивают управление курсом АНПА, горизонтальные рули - дифферентом и глубиной погружения. Применение на АНПА двух пар горизонтальных рулей объясняется, прежде всего, наличием инверсионной скорости хода. При этом значении скорости и более низких управление АНПА с помощью кормовых горизонтальных рулей становится невозможным. В таких случаях управление производится носовыми горизонтальными рулями.
Кроме того, при координированном управлении двумя парами горизонтальных рулей обеспечивается более эффективное и безопасное маневрирование АНПА по глубине на всех скоростях хода.
С целью повышения живучести в настоящее время все более широкое применение получают рулевые устройства, в которых перья рулей не имеют жесткой связи между собой и могут перекладываться независимо друг от друга. При нормальной эксплуатации это дает возможность умерять статический крен от гребного винта при стабилизации глубины погружения и курса АНПА, а при циркуляциях - умерять динамический крен.
Схема рулевых устройств АНПА 9 приведена на фиг.4.
Функционально система управления движением представляет собой совокупность следующих подсистем:
- подсистема нормального управления на ходу, осуществляющая формирование алгоритмов нормального управления, как автоматического, так и дистанционного;
- подсистема противоаварийного управления, осуществляющая алгоритмы выявления аварийных ситуаций, выработку рекомендаций по локализации аварийных ситуаций и выработку управляющих воздействий на исправные технические средства;
- подсистема управления глубиной при отсутствии хода;
- локальная система управления, осуществляющая по управляющим сигналам от подсистемы нормального и противоаварийного управления выработку сигналов управления на исполнительные органы.
Подсистема нормального управления представляет собой двух- или трехканальную систему (в зависимости от проекта АНПА и принятого на нем числа каналов, а также гидравлики управления рулевой машиной). При этом число каналов решающей части во всех случаях одинаково и составляет три. Подсистема управления глубиной погружения в режиме стабилизации глубины "без хода" представляет собой одноканальную систему автоматического и дистанционного управления.
Структура алгоритмов управления имеет следующий вид:
а) 
где ψ'=ψ-ψзад - рассогласование по дифференту; kψ,  - коэффициенты регулирования.
- коэффициенты регулирования.
Этот вид управления обеспечивает стабилизацию дифферента.
б) 
где Δη - рассогласование по глубине; kψA, kψ - коэффициенты регулирования,


где  - сигнал управления по глубине кормовых горизонтальных рулей;
- сигнал управления по глубине кормовых горизонтальных рулей;
 - сигнал управления по глубине носовых горизонтальных рулей;
- сигнал управления по глубине носовых горизонтальных рулей;


 - коэффициенты регулирования.
- коэффициенты регулирования.
Автоматическое управление с помощью кормовых горизонтальных рулей осуществляется на основе алгоритмов (9) и (10) и обеспечивает устойчивое управление с требуемым качеством в режимах стабилизации и маневрирования. Автоматическое управление глубиной с помощью носовых горизонтальных рулей осуществляется на основе алгоритма (11). Одновременное использование кормовых горизонтальных рулей по алгоритму (11) позволит получить новое качество - управление с малым дифферентом (2…3°), определяемым статическими свойствами алгоритма (8).
в) управление курсом осуществляется с помощью вертикальных рулей на основе алгоритма:

где kφ, kφ, k∫ - коэффициенты регулирования.
Система управления движением подводного аппарата (СУД ПА) предназначена для автоматического, дистанционного и аварийного управления движением ПА по курсу, глубине, а также для управления его дифферентом и включает следующие узлы и механизмы (фиг.3): блок управления 47, блок усилителей 48, измеритель глубины 19, навигационно-пилотажные датчики 12, включающие измерители крена 49 и дифферента 50, приборы обратной связи 51 носового горизонтального руля, соединительные коробки 52, золотник 53 аварийного управления, золотник 54 управления, приборы обратной связи 55 вертикальных рулей, гидропривод 56 с краном манипулятором, приборы обратной связи 57 системы стабилизации без хода, гидравлический привод 58 вертикальных рулей 59, гидравлический привод 60 горизонтальных рулей 61, предсказатель 62, золотник 63 переключения, прибор обратной связи 64 кормового горизонтального руля 65, цистерны 66 стабилизации без хода.
Основные функции системы и, соответственно, основные каналы: управление движением по курсу; управление движением по глубине; стабилизация заданного дифферента; стабилизации глубины без хода.
В каждом канале управления осуществляются следующие виды управления:
- автоматическое управление (АУ);
- дистанционное управление (ДУ);
- аварийное управление (АВУ).
Между перечисленными видами управления существует определенная система приоритетов, которую необходимо иметь в виду при эксплуатации. Смысл ее заключается в следующем. Во-первых, в качестве основного режима управления в системе принят режим автоматического управления. Этот режим используется в подавляющем большинстве случаев. Однако если в режиме АУ оператор примет управление "на себя" одновременно с действием автоматики (т.е. начнет осуществлять дистанционное управление), то регулирующие органы (рули) будут реагировать на сигналы ДУ, а не АУ. И в то же время, если при включенном режиме АУ или ДУ производим аварийное управление рулями, то рули не будут реагировать на сигналы АУ или ДУ. Таким образом, режим аварийного управления обладает наивысшим приоритетом по сравнению со всеми остальными; в то же время режим автоматического управления оказывается основным по использованию.
По характеру используемых источников энергии система является электрогидравлической. Это означает, что функционально СУД состоит из двух частей - электрической и гидравлической. Электрическая часть представляет собой электронную схему формирования сигнала управления, который, воздействуя на гидравлическую часть, осуществляет изменение положения регулирующих органов.
Поскольку в системе управления движением АНПА используются классические принципы построения САУ, в частности принцип регулирования "по отклонению", в ее состав входят все функциональные элементы, присущие такой системе: объект регулирования; датчик и задатчик регулируемой величины; суммирующее устройство (сумматор); усилитель; исполнительный механизм; исполнительные органы.
Функциональная схема СУД АНПА приведена на фиг.5. АНПА - 9, рули 78; датчики соответственно заданных значений дифферента 79, курса 80, глубины погружения 81, датчики обратной связи текущих значений глубины погружения 82, курса 83, дифферента 84, скорости 85, положения горизонтальных рулей 86, положения вертикальных рулей 87, суммирующее устройство 88, вычислитель 89, блок суммарного электрического сигнала управления 90, электрогидравлический преобразователь 91.
Объект регулирования системы - АНПА 9; его регулируемыми параметрами, в зависимости от режима работы, могут быть: глубина погружения, курс, дифферент. Их текущие значения вырабатывают соответствующие датчики. Напряжение, пропорциональное текущему значению регулируемых параметров, поступает на суммирующее устройство (СУ). Это устройство вырабатывает сигнал в виде электрического напряжения, пропорциональный разности текущего и заданного значения регулируемой величины (сигнал рассогласования).
В качестве датчика регулируемой величины служит линейный вращающийся трансформатор, разворотом ротора которого оператор задает требуемое значение с пульта управления, соответственно значений дифферента 79, курса 80, глубины погружения 81. Сформированный суммирующим устройством 88 сигнал рассогласования поступает в вычислительное устройство (вычислитель 89) вместе с другими параметрами, необходимыми для формирования сигнала управления исполнительными органами.
Вычислительное устройство (ВУ) предназначено для формирования закона управления объектом в виде суммарного электрического сигнала управления (СЭСУ). В ВУ поступают сигналы: текущей глубины погружения, текущего курса, угла поворота рулей и др. Вычислительное устройство формирует из этих сигналов величины их производных и интегралов, необходимых для формирования СЭСУ (блок суммарного электрического сигнала управления 90). Порядок формирования СЭСУ зависит от режима работы и управления, включенного в системе, и будет рассмотрен отдельно для каждой подсистемы. Сформированный СЭСУ усиливается по мощности и поступает через электрогидравлический преобразователь на исполнительный механизм.
Исполнительный механизм (ИМ) системы предназначен для непосредственного управления исполнительными органами. Кроме того, он обеспечивает преобразование СЭСУ в гидравлический сигнал. Функционально ИМ состоит из гидравлического сервомотора (ГСМ), непосредственно воздействующего на рули АНПА. Исполнительные органы системы - горизонтальные и вертикальный рули, изменяющие положение АНПА в пространстве.
Канал автоматического управления движением АНПА по курсу (фиг.6) предназначен для автоматического поддержания и смены заданного курса движения АНПА. Система может работать в следующих режимах: автоматической стабилизации заданного курса; автоматического перехода на новый заданный курс; дистанционного (следящего) управления вертикальным рулем; аварийного управления вертикальным рулем.
Функциональная схема канала СУД в режиме автоматического управления по курсу включает АНПА - 9, вертикальный руль 59, датчик заданного курса 80, датчики обратной связи текущих значений положения вертикальных рулей 87, курса 83, суммирующее устройство 88, вычислитель 89, блок суммарного электрического сигнала управления 90, электрогидравлический преобразователь 91.
Регулируемый параметр - курс АНПА 9. Таким образом, на суммирующее устройство 88 поступают значения фактического и заданного значения курса. Фактическое значение курса формируется в навигационном модуле комплекса, заданное - задает оператор путем разворота рукоятки и связанного с ним ротора линейного вращающегося трансформатора на пульте управления.
В вычислитель 89 для формирования СЭСУ поступают следующие сигналы:
φ и φ3 - фактическое и заданное значение курса АНПА;
σв - угол поворота вертикального руля (ВР).
В остальном функциональная схема канала СУД АНПА по курсу совпадает с общей функциональной схемой СУД (фиг.5). Рабочие свойства СУДК определяет, в первую очередь, внутренняя структура вычислительного устройства. В режиме автоматического управления АНПА по курсу в структуре вычислительного устройства задействованы следующие блоки (фиг.7). Схема формирования изменения курса вычислителя 89 включает суммирующее устройство 92, на которое подаются значения заданного и фактического курса, блок 93 формирования скорости изменения курса, блок 94 формирования суммарной ошибки, суммирующее устройство 95, блоки нелинейности 96 и 97, блок ограничения 98. Блок нелинейности 96 и блок ограничения 98 образуют линейный ограничитель 99.
Блок 93 формирования скорости изменения курса предназначен для формирования электрического сигнала, пропорционального скорости отклонения курса АНПА от заданного. Введение этого сигнала необходимо для повышения точности управления.
Блок 94 формирования суммарной ошибки формирует сигнал, пропорциональный интегралу ошибки управления. Этот сигнал, являющийся составной частью СЭСУ, компенсирует действие постоянных возмущений на корпус АНПА течения, бокового ветра (в надводном положении) и т.п. Величину этого сигнала можно скорректировать вручную с пульта управления. Действие сигнала выражается в задании определенного постоянного балансировочного угла поворота ВР "на снос".
Блок нелинейности 96 представляет собой амплитудный ограничитель СЭСУ. Он установлен на выходе ВУ и "пропускает через себя" сигнал управления в гидравлическую часть системы только в том случае, если он превышает некоторую, заранее заданную величину. Таким образом, чувствительность системы управления искусственно занижается, но при этом снижается количество перекладок вертикального руля, следовательно, повышается долговечность гидравлической части системы, наиболее подверженной к износу. С другой стороны, практически установлено, что эксплуатационная устойчивость АНПА на курсе считается обеспеченной, если при волнении моря 3…5 баллов ВР перекладывается в среднем 4…6 раз в минуту.
Блок ограничения 98, в отличие от блока 96, наоборот, "пропускает через себя" сигнал управления, если он не превышает максимальную, также заранее заданную величину отклонения руля. Резкая перекладка руля "на борт" нежелательна для АНПА и механизмов и может стать опасной на высоких скоростях хода. Таким образом, вводимое ограничение на максимальную величину перекладки обеспечивает автоматическое регулирование движения АНПА по курсу по апериодическому закону с достаточно большой постоянной времени и исключает резкую перекладку руля на борт. Кроме того, благодаря этому предотвращаются установка руля в критическое положение (т.е. такое, когда сила сопротивления движению значительно превышает подъемную силу руля в горизонтальной плоскости), а также кавитация на руле при высоких скоростях хода.
Блок нелинейности 97 формирует аварийный сигнал в режиме автоматического управления в случае "ухода" АНПА с курса на определенную величину. Такая ситуация возможна в случае действия возмущений большой величины, например, при попадании АНПА в сильное боковое течение, потере руля и т.п.
Суммарный электрический сигнал управления вертикальным рулем представляет собой следующую функциональную зависимость:

где Δφ - сигнал, пропорциональный отклонению фактического курса от заданного;
dΔφ/dt - сигнал, пропорциональный скорости изменения курса АНПА;
∫Δφdt - сигнал, пропорциональный интегралу (суммарной ошибке во времени) отклонения и определяющий балансировочный угол вертикального руля;
σвр - сигнал, пропорциональный углу перекладки вертикального руля;
К1,2 - коэффициенты составляющих алгоритма управления.
Сформированный по этому закону СЭСУ - если он не меньше, чем задан в БН1, и не больше, чем в блоке ограничения, - поступает в гидравлическую часть системы управления.
Принцип функционирования системы в режиме автоматического перехода на новый заданный курс. При движении ПА на циркуляции различают три характерных периода:
1. Маневренный период - от начала до конца перекладки руля. Продолжительность этого периода может достигать 30 с и в основном определяется инерционными свойствами гидравлической части САУД. В маневренном периоде вследствие увеличения угла перекладки постепенно увеличивается сила, действующая на руль.
2. Эволюционный период - от момента окончания перекладки руля до начала установившегося движения по окружности. По продолжительности этот период может иметь различные значения для разных ПА. Заканчивается он тогда, когда ПА меняет направление движения на 90…120° по отношению к первоначальному курсу.
3. Установившийся период - соответствует движению корабля по окружности с практически постоянной скоростью.
Такую классификацию можно назвать скорее теоретической, чем практической. В первую очередь - из-за чрезвычайно редкого возникновения установившегося периода поворота. С практической точки зрения, а также для удобства рассмотрения принципа работы СУДК в дальнейшем будем придерживаться следующей классификации фаз поворота.
Условно можно считать, что поворот по курсу осуществляется в три фазы. В первой фазе поворачивается вертикальный руль, и АНПА под его действием начинает отклоняться от первоначального курса. Во второй фазе угол поворота руля поворота руля постоянен, АНПА описывает круг с радиусом, приближающимся к постоянному (циркуляция). При подходе к новому заданному курсу начинается третья фаза - одержание АНПА; в этой фазе руль отводится в нулевое или даже в противоположное предыдущему положение для исключения "рыскания" АНПА и окончания циркуляции без перерегулирования.
Для автоматического перехода АНПА на новый заданный курс-оператор пульта управления с помощью задатчика устанавливает требуемую величину курса. На выходе сумматора формируется сигнал рассогласования, поступающий на второй сумматор.
Особенность работы второго сумматора заключается в том, что приходящие на его вход сигналы dΔφ/dt и σвр предварительно инвертируются (их фаза изменяется на противоположную), т.е. они являются демпфирующими. Таким образом, вклад сигнала в СЭСУ определяет отклонение руля в сторону компенсации рассогласования курсов φз и φ, а вклад всех остальных сигналов (за исключением интегрального, который в рассматриваемом режиме не задействован) препятствует этому отклонению (ограничивает его).
Так начинается первая фаза поворота - выход корабля на циркуляцию. В начальный момент времени все остальные сигналы, кроме пропорционального, отсутствуют, и СЭСУ определяется выражением:

Под действием этого сигнала вертикальный руль начинает поворачиваться в сторону, компенсирующую возникшее рассогласование курсов. Корпус АНПА отклоняется от первоначального курса.
Вместе с этим начинают увеличиваться величины сигналов dΔφ/dt и σвр.
В момент, когда их суммарное значение достигнет Δφ, поворот вертикального руля прекратится, АНПА будет находится на циркуляции, радиус которой стремится к своему постоянному значению.
С подходом к новому курсу величина рассогласования постепенно уменьшается, при этом начинается третья, заключительная фаза поворота - одержание АНПА. Основная задача в этой фазе состоит в том, чтобы обеспечить апериодический, без перерегулирования подход к новому заданному курсу и фиксировать АНПА на нем.
Каждый АНПА, даже при совершенно точно закрепленном в среднем положении руле, непрерывно уклоняется от прямолинейного курса. АНПА как объект управления не обладает свойством саморегулирования. Подобная неустойчивость на курсе называется рыскливостью. В первом приближении, АНПА на курсе совершает синусоидальные колебания в горизонтальной плоскости.
Рыскливость определяют внешние возмущения, действующие на АНПА, - порывы ветра, волнение моря, течения; рыскливости способствуют также неизбежная несимметрия корпуса, выступающих частей, неравномерность распределения нагрузки и т.п.
Смысл работы системы управления движением АНПА состоит в том, что возникающее небольшое рассогласование заданного и фактического курса компенсируется поворотом вертикального руля.
В случае самопроизвольного ухода АНПА с заданного курса на определенную в сигнализирующем блоке нелинейности величину (обычно 5…8°), срабатывают сигнализация "Уход с курса".
Реакция АНПА на постоянно действующие возмущения - течение, ветер, буксируемые гидроакустические измерители, неудифферентованность и т.д. - выражается в наличии несимметричных колебаний относительно заданного курса. Для компенсации таких постоянных возмущений при дистанционном управлении обычно проворачивают вертикальные рули на постоянный, так называемый балансировочный угол в сторону действия возмущений. Например, если в качестве постоянно действующего возмущения выступает боковой ветер и правый борт АНПА, в составе СЭСУ возникает интегральный, постоянно действующий сигнал. Он обеспечивает поворот вертикального руля на постоянный балансировочный угол на правый борт. С уменьшением рассогласования уменьшается и интегральная составляющая СЭСУ. Руль автоматически отворачивается в противоположную сторону. Для формирования этого сигнала предназначен блок 94 формирования суммарной ошибки.
Канал управления движением по глубине предназначен для автоматического поддержания и/или смены значений заданной глубины погружения и угла дифферента. Основные режимы работы системы:
- режим автоматической стабилизации заданной глубины;
- режим автоматического перехода на новую заданную глубину;
- режим автоматического поддержания заданного дифферента во время движения АНПА.
Каждый из перечисленных режимов формируется автоматически, в зависимости от величин рассогласований регулируемых параметров.
Функциональная схема канала автоматического управления АНПА по глубине (фиг.8) включает АНПА-9, схему ввода заданных значений дифферента и глубины погружения 100, суммирующее устройство 101, на которое поступают заданные и текущие значения дифферента и глубины погружения, микропроцессор 102, блок формирования суммарного сигнала управления 103, электрогидравлический преобразователь 104, горизонтальные рули 76 и 77.
Регулируемый параметр - глубина погружения, а при управлении дифферентом - величина заданного дифферента. Фактическое значение глубины погружения и дифферента формируется специальными датчиками, в качестве преобразовательных элементов, которых служат линейные вращающиеся трансформаторы (ЛВТ). Таким образом, в схему поступают электрические сигналы в виде напряжения, пропорционального фактическим значениям глубины и дифферента. Заданное значение этих параметров, как и для случая управления курсом, задает оператор пульта управления путем разворота рукоятки и связанного с ним ротора ЛВТ.
В вычислительное устройство (микропроцессор 102) для формирования суммарного электрического сигнала управления (СЭСУ) поступают следующие сигналы: заданная и фактическая глубина погружения, соответственно; заданная и фактическая величины дифферента АНПА; угол поворота горизонтального руля; фактическая скорость АНПА.
Все эти сигналы формируются соответствующими датчиками в виде напряжений, пропорциональных соответствующим величинам.
В зависимости от конструктивных особенностей (архитектуры) АНПА органами управления могут служить горизонтальные рули: носовые, средние, рубочные, большие и малые кормовые. Вне зависимости от имеющихся и выбранных для управления горизонтальных рулей принципы управления не меняются. В конкретной промышленной реализации АНПА управление осуществляется парой кормовых рулей.
В режиме автоматического управления ПА по глубине в вычислительном устройстве задействованы следующие блоки (фиг.9): суммирующее устройство 105, блоки нелинейности 106 и 107, выходной сумматор 108, включающий блоки нелинейности 109 и 110, блок формирования скорости изменения дифферента 111, блок формирования скорости изменения глубины 112, суммирующее устройство 113.
Блок формирования скорости изменения глубины 112 предназначен для формирования электрического сигнала в виде напряжения, пропорционального скорости изменения глубины во времени. Введение этого сигнала необходимо для повышения точности регулирования глубины путем уменьшения регулирующего воздействия при подходе значения фактической глубины к заданному (в режиме автоматического перехода на новую глубину).
Блоки нелинейности 109 и 110 образуют линейный ограничитель, функционально состоящий из двух схем: схемы ограничения максимального дифферента (бл.109) и схемы ограничения максимальной скорости изменения дифферента (бл.110). Введение этих ограничений необходимо: во-первых, для исключения возможности падения АНПА на грунт или погружения на запредельную глубину; во-вторых, для обеспечения безопасной работы механизмов главной энергетической установки. Оба блока представляют собой электронные усилители, формирующие выходной сигнал только после того, как величина на входе достигнет определенного уровня.
Блок формирования скорости изменения дифферента 111 предназначен для формирования сигнала, пропорционального скорости изменения дифферента, и подачи его в блок 110 линейного ограничителя.
Блок нелинейности 106 формирует сигнализацию в случае самопроизвольного отклонения АНПА от заданной глубины на определенную величину.
Блок нелинейности 107 представляет собой усилитель, работающий в релейном режиме. Он предназначен для релейного изменения своего коэффициента передачи, в зависимости от величины скорости АНПА.
Принцип формирования суммарного электрического сигнала управления. Суммарный электрический сигнал управления горизонтальными рулями представляет собой следующую функциональную зависимость:

где Δη(V) - сигнал, пропорциональный отклонению фактической глубины погружения от заданной, и зависящий от V (скорости ПА);
dΔη/dt - сигнал, пропорциональный скорости изменения глубины;
Δψ - сигнал, пропорциональный дифференту;
Δψ/dt - сигнал, пропорциональный скорости изменения дифферента;
σгр - сигнал, пропорциональный углу перекладки горизонтальных рулей;
Кос - коэффициент обратной связи.
Формирование СЭСУ управления горизонтальными рулями осуществляется по принципу "соревнования сигналов". Это означает следующее. Суммарный электрический сигнал формируется на суммирующем устройстве 113, на который поступают все составляющие сигнала согласно выражению (15). Составляющая СЭСУ обеспечивает поворот горизонтальных рулей в сторону компенсации рассогласования - например, если фактическая глубина погружения меньше заданной, то рули поворачиваются "на погружение". Все остальные составляющие СЭСУ - демпфирующие; вклад этих сигналов в суммарный обеспечивает поворот рулей в противоположную сторону. Сформированный таким образом СЭСУ поступает в гидравлическую часть системы управления.
В режиме автоматического перехода на новую заданную глубину, на первом этапе посредством перекладки горизонтальных рулей создается определенный дифферент АНПА. В конце этого периода рули отводят кратковременно в противоположную сторону для гашения нарастающей угловой скорости, а затем переводят практически в нулевое положение. Таким образом, АНПА начинает второй этап изменения глубины - установившийся. На этом этапе все параметры движения неизменны, изменение глубины происходит за счет подъемной силы на корпусе АНПА. С подходом к заданной глубине погружения начинается третий этап - одержание. Для этого рули, как правило, перекладывают в сторону, обеспечивающую уменьшение дифферента, затем в противоположную - для гашения возникающей угловой скорости. Наконец, их переводят в положение, обеспечивающее движение АНПА на новой глубине.
Маневр изменения глубины погружения в общем случае включает в себя три этапа: этап создания дифферента; этап установившегося изменения глубины с постоянным дифферентом; этап одержания.
Для примера, рассмотрим маневр автоматического погружения АНПА на новую заданную глубину, считая, что при всплытии все происходящие процессы идентичны процессам при погружении, но противоположны им по фазе.
Для автоматического погружения АНПА на новую заданную глубину оператор пульта управления с помощью задатчика устанавливает требуемое значение глубины. На выходе суммирующего устройства 105 формируется сигнал рассогласования, который через блок нелинейности 107 поступает на суммирующее устройство 113. В начальный момент времени все остальные составляющие СЭСУ отсутствуют.
Рули начинают поворачиваться "на погружение", т.е. в сторону уменьшения рассогласования заданной и фактической глубины. Начинается первая фаза погружения - создание требуемого дифферента. Первая фаза погружения, как было сказано ранее, сопровождается увеличением угловой скорости. При определенном ее значении на суммирующее устройство 113 блок нелинейности 107 начинает поступать сигнал, который обеспечивает отведение горизонтальных рулей и гашение угловой скорости. Дифферент стабилизируется, и АНПА начинает погружение под действием подъемной силы на корпусе.
С подходом к требуемой глубине погружения сигнал Δη постепенно уменьшается, а сигнал dΔη/dt в этой ситуации имеет наибольшую величину и обеспечивает одержание АНПА в третьей фазе погружения. Дифферент, угол перекладки рулей, скорость изменения глубины и дифферента уменьшаются, и к моменту выхода АНПА на заданную глубину дифферент устанавливается равным балансировочному значению. Управляющие сигналы при этом равны нулю.
В рассматриваемом режиме действие блока нелинейности 109 осуществляется при превышении дифферентом установленной в блоке величины. Этот блок, таким образом, является ограничительным. Дополнительно следует отметить, что блок нелинейности 110 имеет коэффициент передачи, зависящий от скорости АНПА. Поскольку основная сила, под действием которой АНПА погружается и всплывает, - это сила на корпусе, то с увеличением скорости ее эффективность также увеличивается, причем достаточно интенсивно. В связи с этим при увеличении скорости коэффициент передачи блока нелинейности 109 искусственно уменьшают - для обеспечения безопасности плавания (в первую очередь, путем предотвращения больших вертикальных скоростей).
При движении на заданной глубине могут возникать периодические возмущающие воздействия, отклоняющие АНПА в ту или иную сторону. Суммарный электрический сигнал управления в этом случае, как правило, невелик и определяется, в основном, составляющей Δη, что вызывает соответствующую перекладку горизонтальных рулей и возврат АНПА к заданной глубине.
Постоянно действующие возмущения (например, неудифферентованность, подводное течение) приводят к возникновению статической ошибки. Для ее устранения с помощью линейного вращающегося трансформатора, связанного с датчиком дифферента, вводят корректирующий сигнал, равносильный заданию балансировочного дифферента. Этот сигнал компенсирует действие возмущения. Аналогично осуществляется поддержание заданного дифферента во время движения АНПА. СЭСУ в этом случае формируется в виде зависимости:

где kос - коэффициент обратной связи.
При самопроизвольном отклонении АНПА от заданной глубины (обычно 5…7 м) срабатывает блок нелинейности 106, формирующий сигнал "Уход с глубины".
В предлагаемом техническом решении в основу СУД АНПА положена единая концепция, предусматривающая интегральный подход в использовании технических, программных и организационных решений, обеспечивающих эффективность функционирования системой управления техническими средствами. Эта концепция учитывает требования отечественных нормативных документов и включает следующие принципы и положения:
1) СУД представляет собой составную часть единой комплексной системы управления всеми видами технических средств;
2) СУД объединена единством технических решений по всем системам управления техническими средствами;
3) СУД соответствует высокой степени автоматизации управления техническими средствами;
4) СУД удовлетворяет функционально-иерархическим принципам организации структуры, позволяющим обеспечивать высокий уровень надежности и живучести системы за счет рационального распределения функций между системами, независимости функционирования аппаратуры нижнего уровня от аппаратуры верхнего уровня, а также за счет сокращения потоков и объемов информации, передаваемой на высшие уровни вследствие обработки ее на нижнем уровне.
В соответствии с перечисленными принципами СУД создается как многоуровневая иерархическая функционально-децентрализованная распределенная система. Структурно (по вертикали) она представляет собой систему, в которой на каждом уровне выполняются соответствующие функции. Обмен информацией между уровнями производится в обоих направлениях, при этом отказы (сбои) в выполнении функции аппаратуры более высокого уровня не должны влиять на способность аппаратуры выполнять собственные функции.
Нижний уровень иерархии - это локальные задачи управления отдельными агрегатами, механизмами и системами, локальная обработка информации и связь с объектом управления. Этот уровень включает в себя локальные системы управления, микропроцессорные средства, выполняющие функции локальных контроллеров управления и обработки информации, выходные устройства (исполнительные автоматы).
Средний уровень иерархии - это уровень задач централизованного управления отдельными функциональными техническими средствами, программно-логических задач, централизованной обработки информации. Этот уровень включает в себя аппаратуру, выполненную как на микропроцессорных средствах, так и на средствах аналоговой техники и средствах "жесткой" логики. Эта аппаратура выполняет основной объем решения задач защиты, логического управления и регулирования параметров технических средств.
Верхний (высший) уровень - уровень оператора. Этот уровень управления совокупностью технических средств характеризуется тем, что контур управления технологическим процессом замыкается через оператора. К этому уровню относится пульт управления с функциональными клавиатурами, дисплеями и другими средствами представления информации, а также операторские станции (контроллеры связи). Рабочее место оператора сформировано в виде пульта управления консольного типа. Компоновка рабочего места в виде пульта позволяет разделить сенсорные и моторные зоны работы оператора, что создает более благоприятные условия для его работы.
Разработка пульта выполнена с учетом эргономических требований и роли фактора взаимодействия "человек-машина". Для уменьшения количества ошибок оператора на пульте организованы различные зоны управления: зоны, в которых органы управления размещены по функциональному признаку; зоны безопасности; зоны управления вспомогательными системами и устройствами; зоны аварийной сигнализации и т.п. Индивидуальное управление реализуется адресным способом. Адресация осуществляется набором кода на клавиатуре. Для наиболее ответственных механизмов и устройств предусмотрены особые каналы резервного управления, не зависимые от индивидуальных органов управления, расположенные на пульте управления. При выборе способов представления информации возникает необходимость решения задачи минимизации потоков информации, поступающей к оператору, без снижения ее полноты. С этой целью, а также для концентрации внимания оператора на наиболее важных информационных сообщениях, представление информации оператору производится в обобщенном виде. Кроме того, предусмотрена функциональная группировка информационных сообщений, их группировка по значимости для безопасности (аварийные, предупредительные, диагностические, информационные); использование индикаторов различных цветов, прерывистого свечения и звуковых сигналов.
Источники информации.
1. Патент RU №2224279 C1, 20.02.2004.
2. Патент RU №2207585 C2, 27.06.2003.
3. Патент RU №2260191 C1, 10.09.2005.
4. Патент US №5523951 A, 04.06.1996.
5. Патент US №5179385 A, 12.01.1993.
6. Патент US №4513378 A, 23.04.1985.
7. Патент RU №2410282.
8. Навигационный комплекс автономного подводного робота и особенности его применения в условиях Арктики / Ю.В.Ваулин, А.В.Инзарцев, А.В.Каморный и др. // Подводные исследования и робототехника. Институт проблем морских технологий ДВО РАН, Владивосток, №1(5), 2008, с.24-31.
Интегрированный комплекс навигации и управления движением автономного необитаемого подводного аппарата, включающий судовой пост управления движением автономного необитаемого подводного аппарата с блоком гидроакустического телеуправления, размещенным на обеспечивающем судне, при этом обеспечивающее судно оснащено приемником спутниковой навигационной системы, системой единого времени, судовой аппаратурой управления, обработки и отображения информации, автономный необитаемый подводный аппарат оснащен приемопередающими блоками гидроакустической системы навигации с длинной базой, системой гидроакустического телеуправления и связи, навигационно-пилотажными датчиками, локальной вычислительной сетью, гидроакустическим доплеровским лагом, гирокомпасом или/и инерциальной навигационной системой, приемником спутниковой навигационной системы, магнитным компасом, измерителем глубины, системой управления рулевыми механизмами, включающей вычислитель, а еще автономный необитаемый подводный аппарат оснащен аппаратурой для выполнения гидрологических исследований, включающей гидролокатор бокового обзора, профилограф, измерители температуры и электропроводности морской среды, фотокамеры, отличающийся тем, что в систему управления рулевыми механизмами введены каналы выработки сигналов стабилизации крена, дифферента, глубины и курса, дополнительно введены многолучевой эхолот, акустический доплеровский измеритель течения, гидроакустический доплеровский лаг выполнен с возможностью работы по сигналам объемной реверберации, гидроакустическая система навигации с длинной базой содержит не менее восьми донных маяков-ответчиков.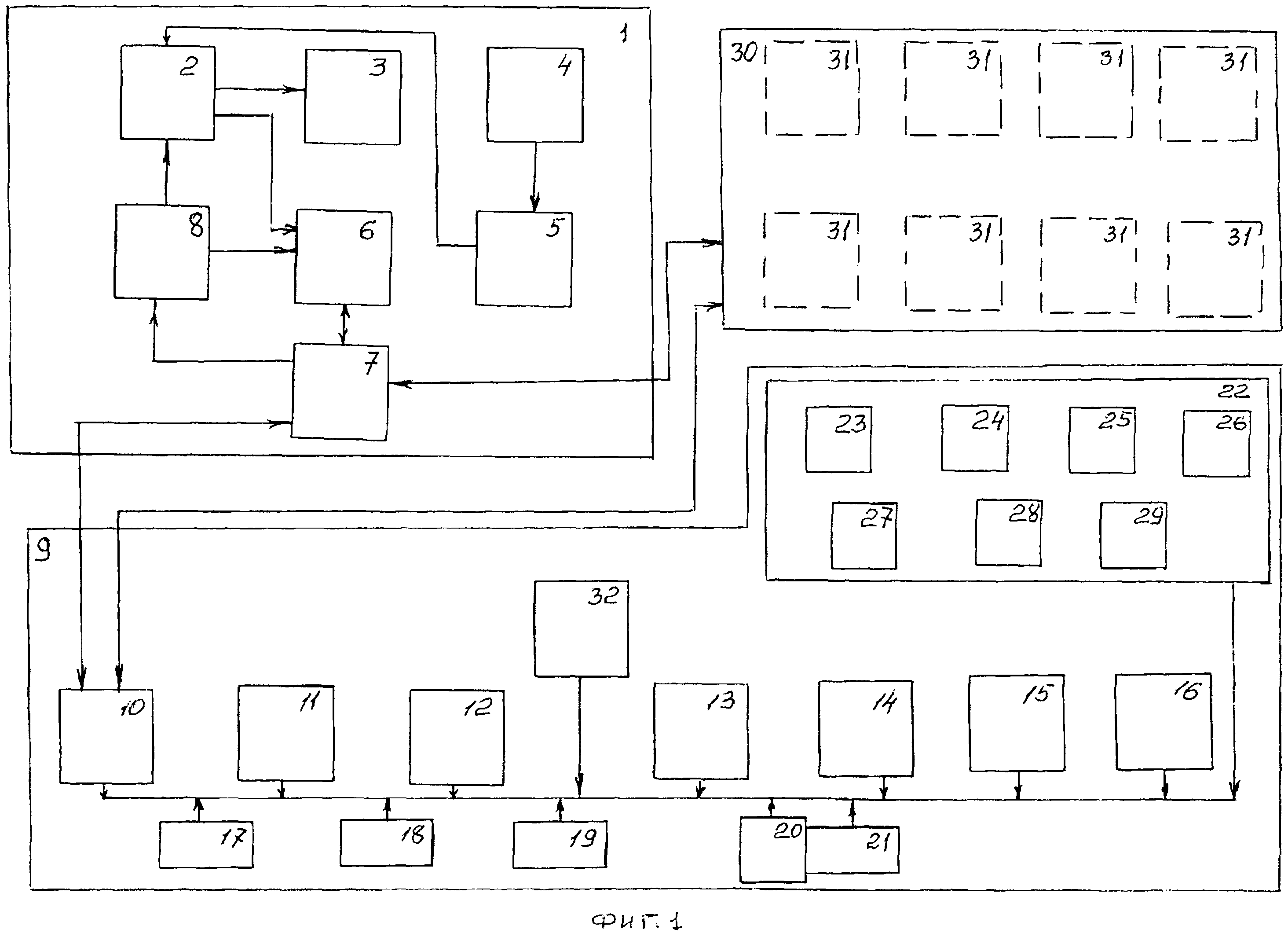
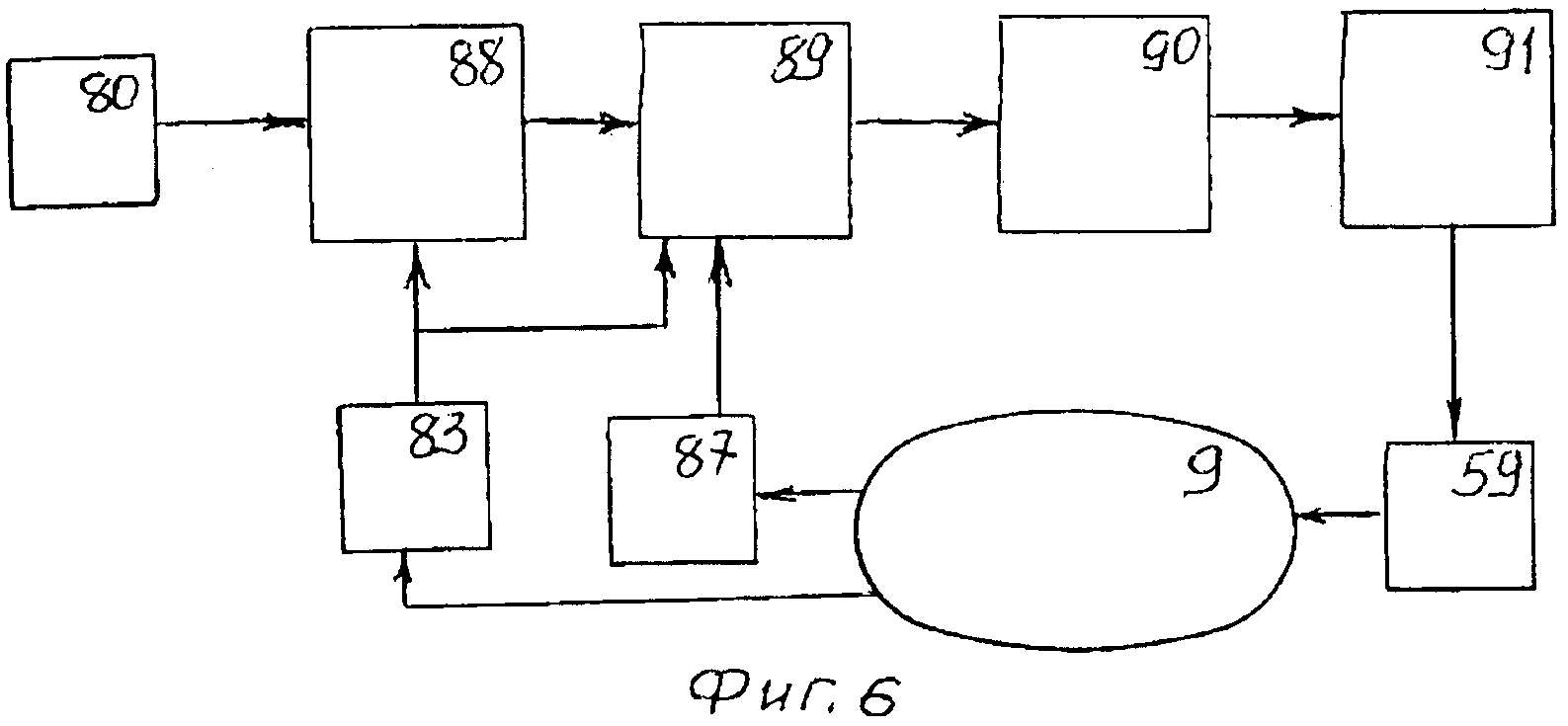
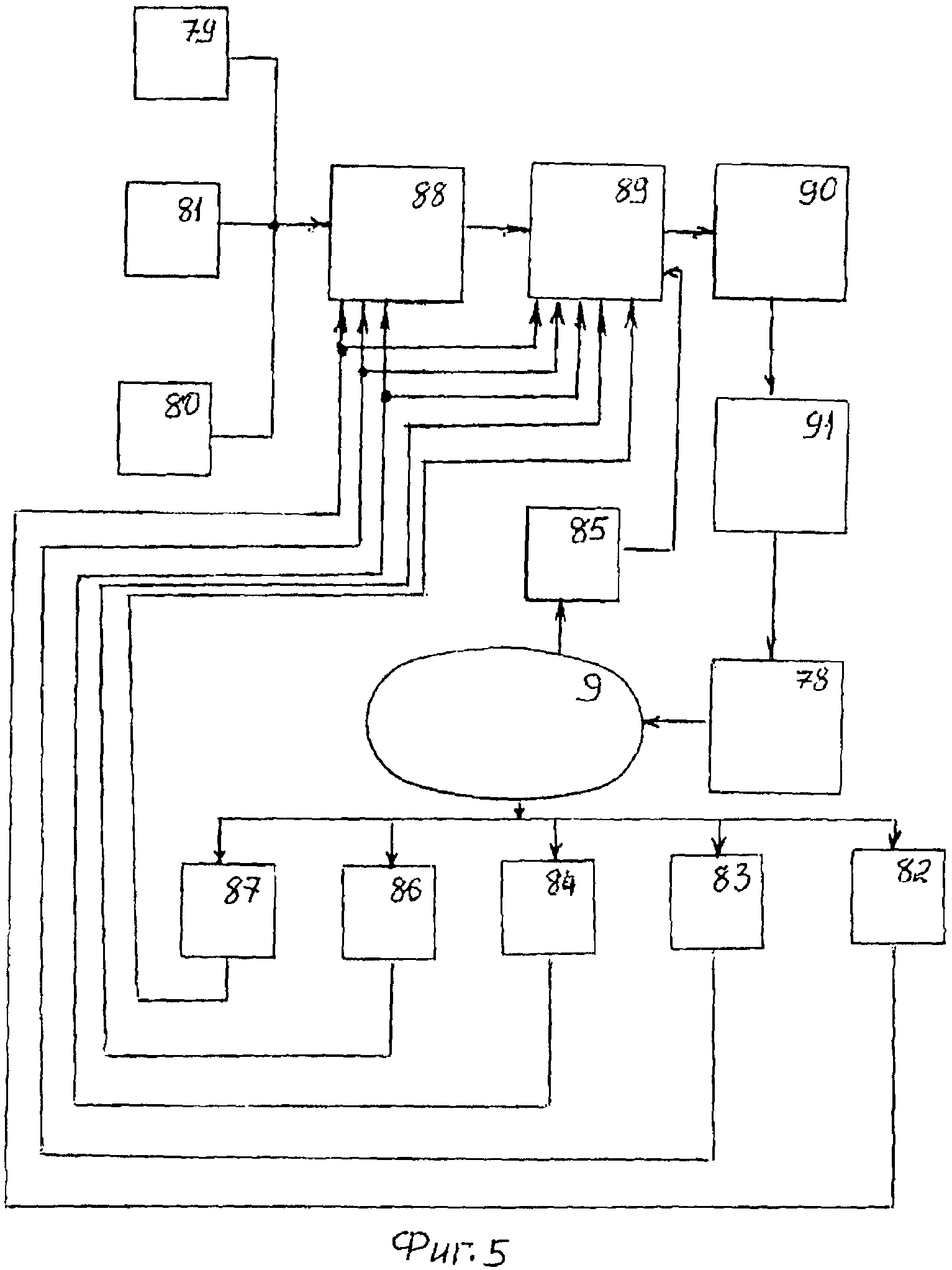
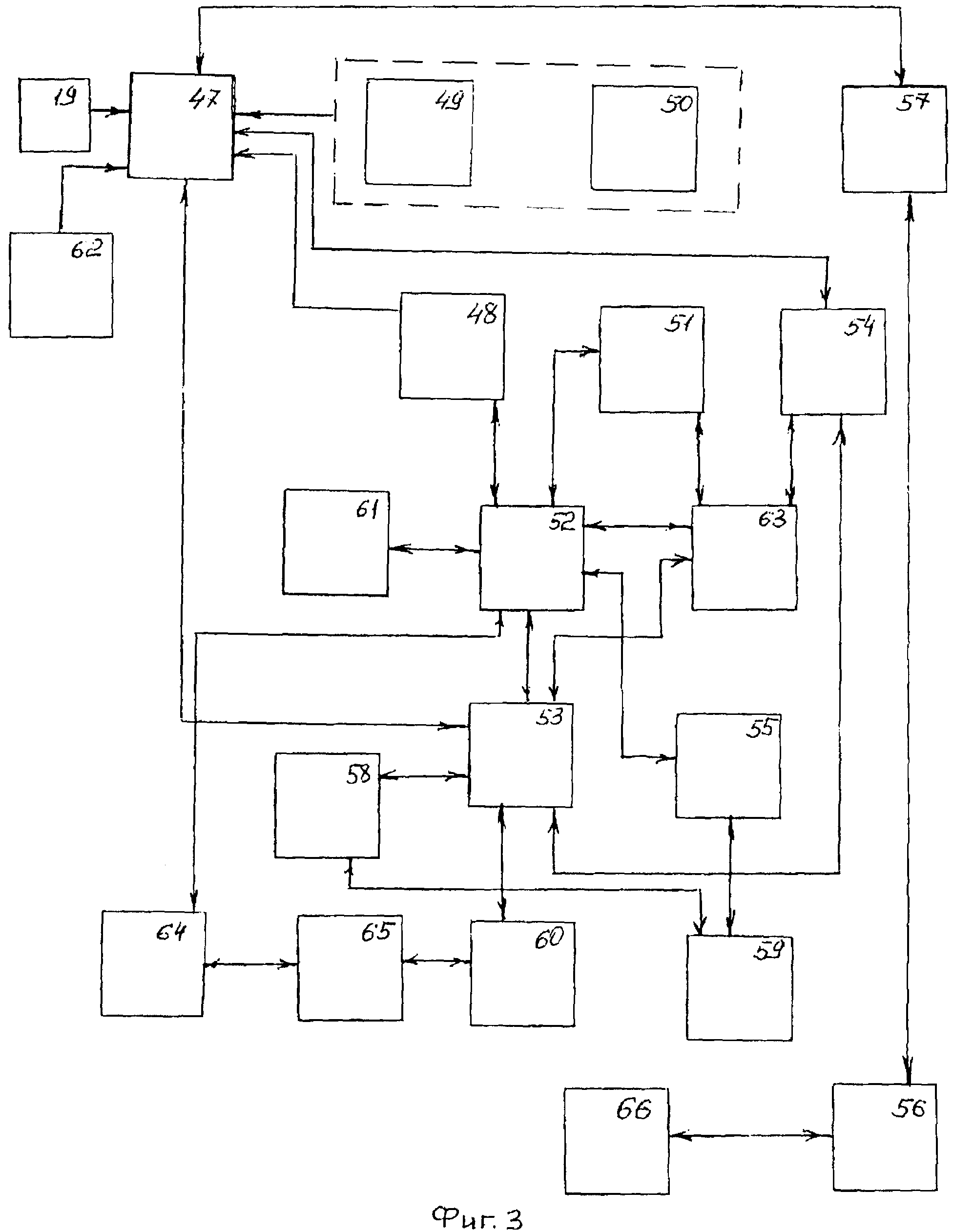
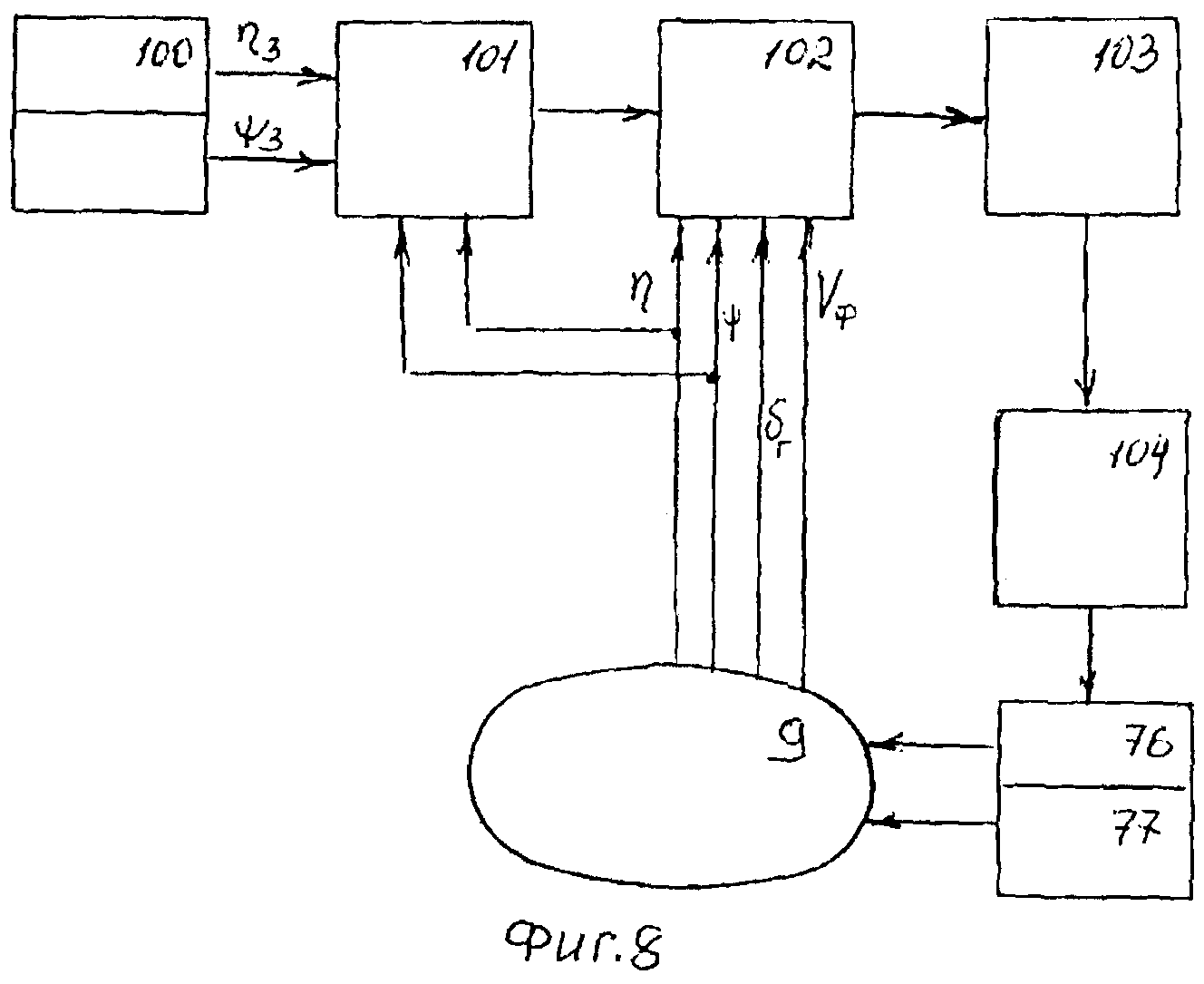
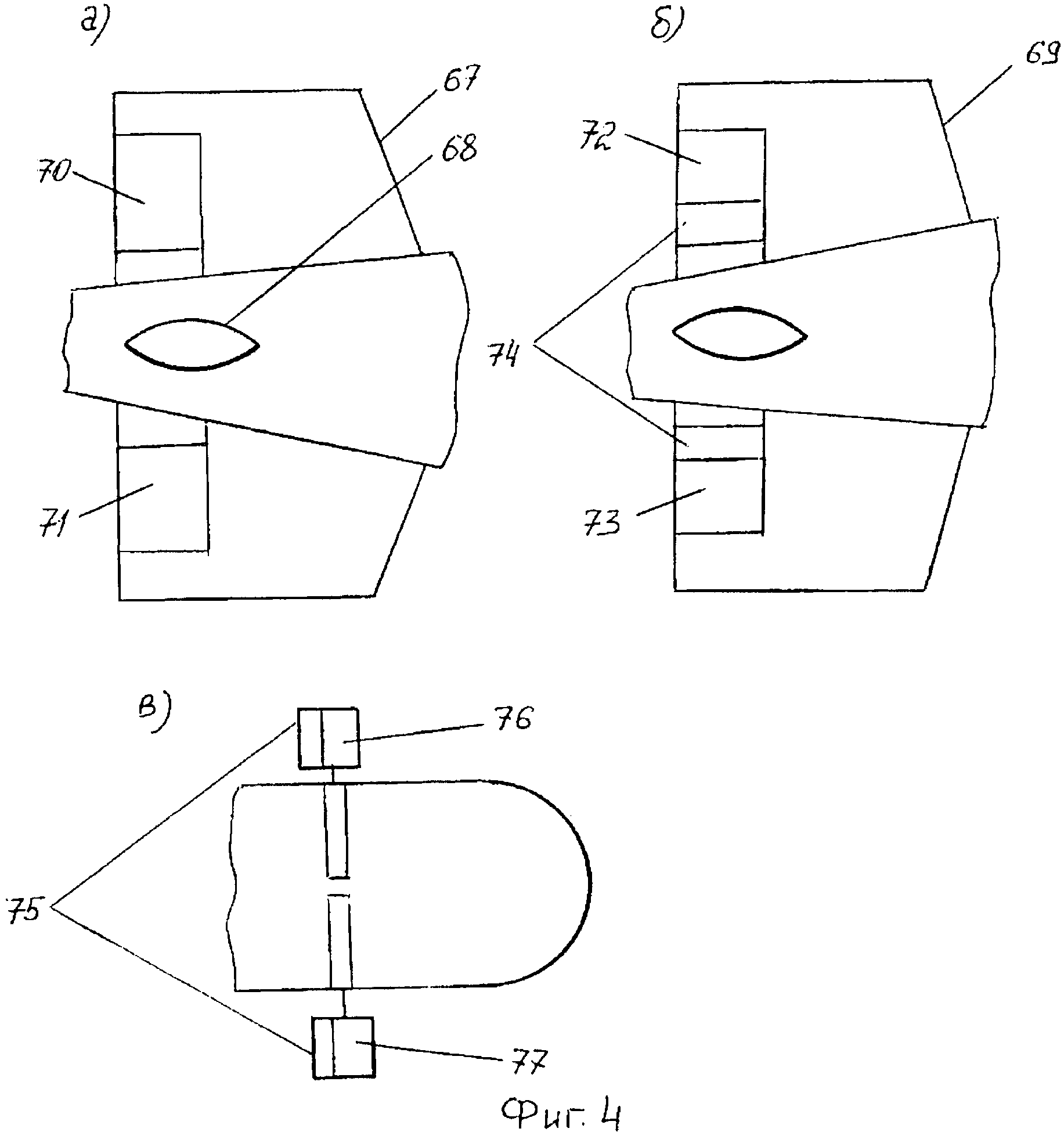
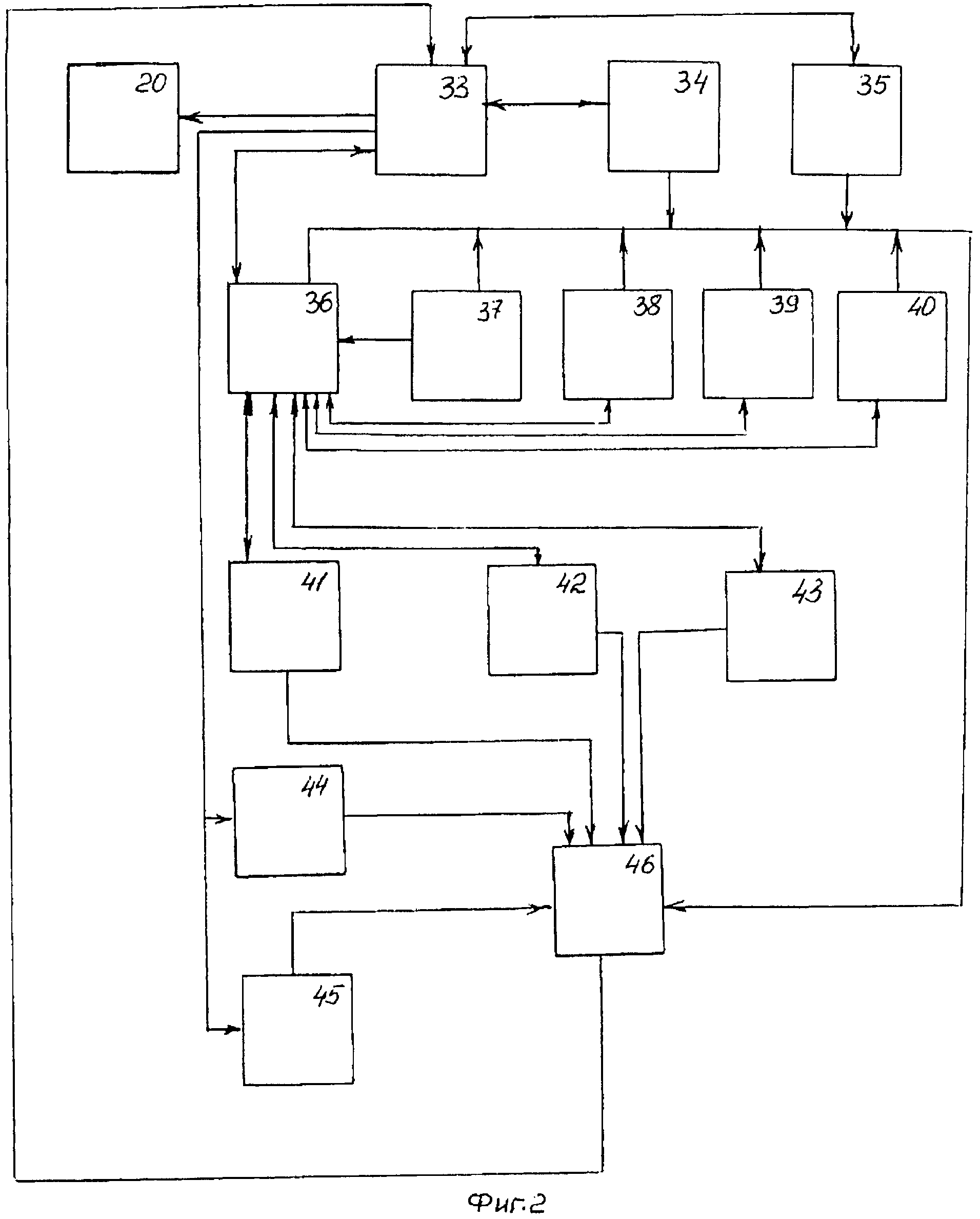
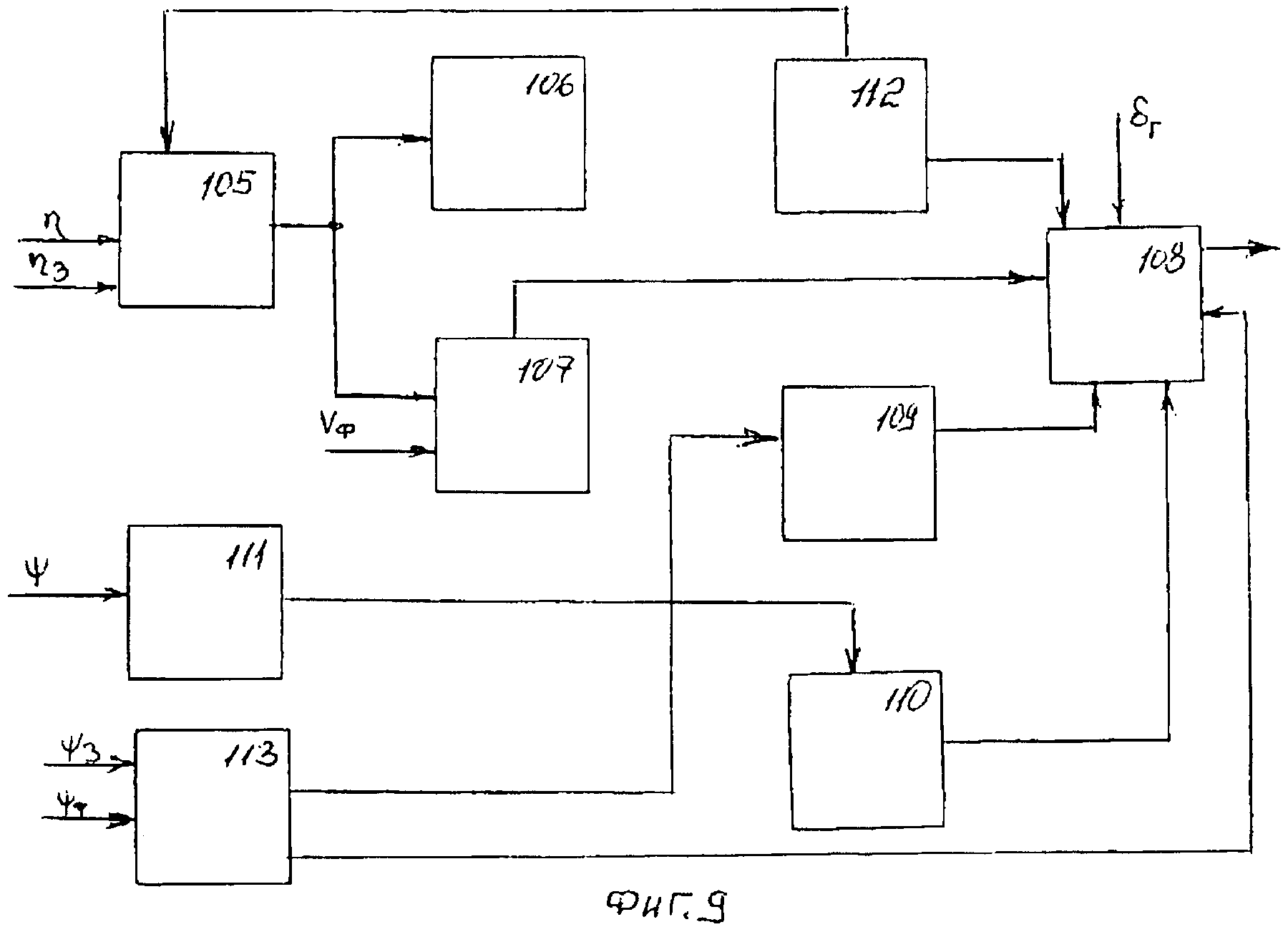
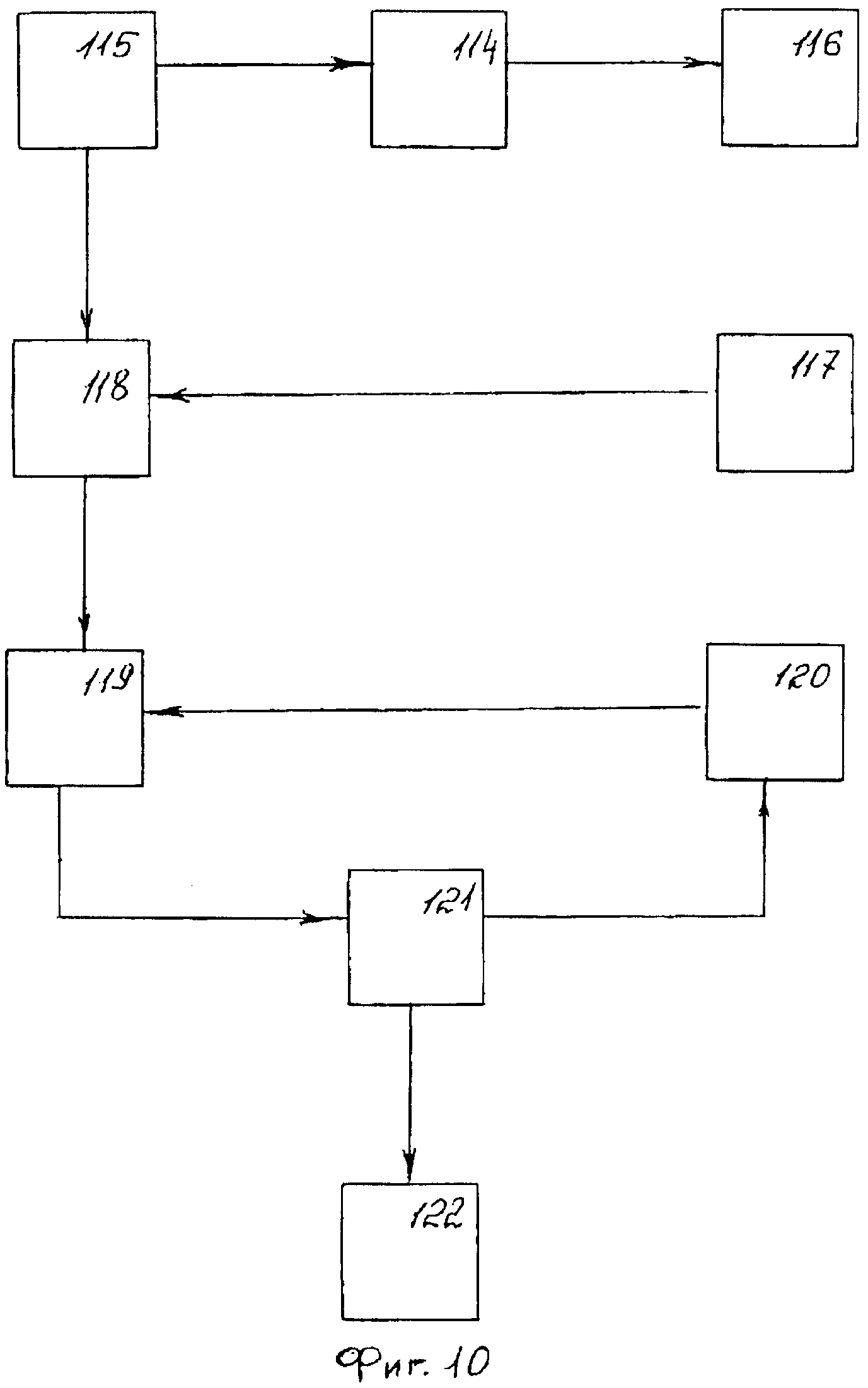
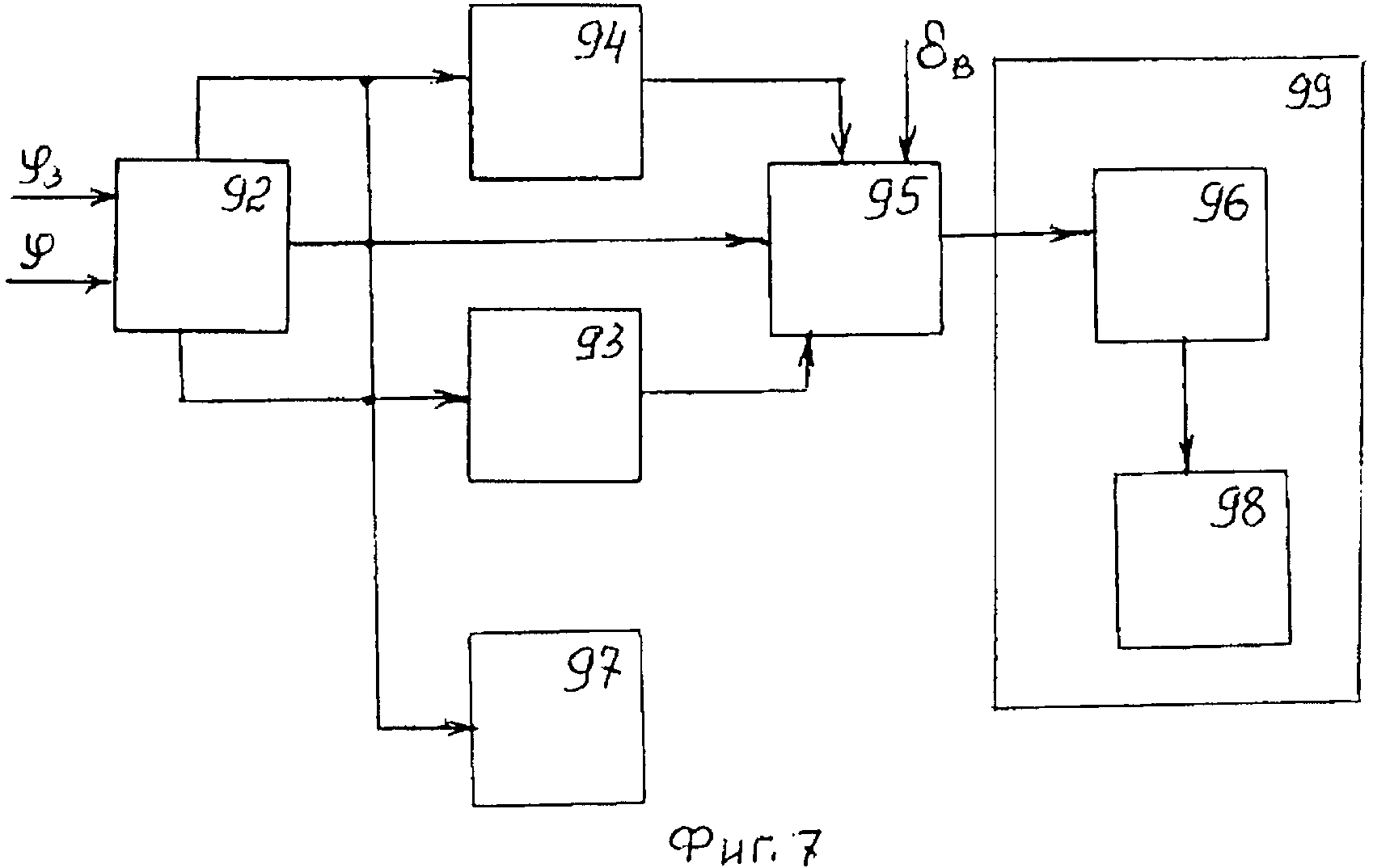
Катализатор для получения сверхвысокомолекулярного полиэтилена
Способ получения хлопчатобумажной ткани технического назначения с комплексом защитных свойств от кислот и нефтепродуктов
Способ геохимической разведки
Координатный стол
Стенд для контроля точности контурных перемещений промышленного робота
Эпоксиполиэфирная лакокрасочная композиция
Способ сбора штормовых выбросов морских водорослей
Устройство для преобразования изменения сопротивления в напряжение
Способ и устройство прогноза возможности возникновения цунами и определения его эпицентра
Устройство для защиты емкостного накопителя энергии
Катализатор для получения сверхвысокомолекулярного полиэтилена
Способ получения хлопчатобумажной ткани технического назначения с комплексом защитных свойств от кислот и нефтепродуктов
Способ геохимической разведки
Координатный стол
Стенд для контроля точности контурных перемещений промышленного робота
Эпоксиполиэфирная лакокрасочная композиция
Способ сбора штормовых выбросов морских водорослей
Фотохромная регистрирующая среда для трехмерной оптической памяти
Устройство для преобразования изменения сопротивления в напряжение
Устройство для защиты емкостного накопителя энергии

