Результат интеллектуальной деятельности: Разностно-дальномерный способ определения местоположения источника радиоизлучения в условиях многолучевого распространения радиоволн
Вид РИД
Изобретение
Изобретение относится к радиотехнике, а именно к способам определения местоположения (ОМП) источника радиоизлучения (ИРИ), и может быть использовано в навигационных, пеленгационных, локационных средствах для определения местоположения ИРИ.
Известен способ определения координат источника радиоизлучений с борта летательного аппарата (см. 1. патент РФ на изобретение № 2619915, М. кл. G01S 1/08, G01S 5/04, опубл. 19.05.2017). Указанный способ заключается в том, что на основе поляризационных измерений параметров электромагнитной волны в различных точках пространства в течение полета летательного аппарата находят поверхности и линии положения, пересечение которых принимают за координаты ИРИ.
Для реализации указанного известного способа выполняют следующие операции:
- принимают триортогональной антенной системой (ТОАС) радиосигналы от ИРИ;
- измеряют координаты центров и углы ориентации ТОАС в различные моменты времени в процессе полета летательного аппарата;
- определяют положения в пространстве векторов напряженности электрического поля в различные моменты времени;
- формируют вспомогательные плоскости положения ИРИ;
- определяют линии положения ИРИ как линии пересечения каждой из вспомогательных плоскостей положения ИРИ с поверхностью Земли;
- вычисляют координаты ИРИ в точке пересечения линий положения ИРИ.
Однако данный способ определения координат источника радиоизлучений с борта летательного аппарата характеризуется:
- длительным временем определения координат ИРИ, связанным с необходимостью перемещения летательного аппарата для выполнения измерений с различных точек траектории полета, что не позволяет применить указанный способ для определения координат мобильных ИРИ;
- низкой точностью определения координат ИРИ в условиях многолучевого распространения радиоволн, связанной с невозможностью исключения измерений, полученных по отраженной от различных препятствий волне.
Известен способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов (см. 2. патент РФ на изобретение № 2605457, М. кл. G01S 5/00, опубл. 20.12.2016). Указанный способ заключается в том, что на основе измерений временных задержек и частотных сдвигов между переданными и принятыми тестовыми сигналами системы, с учетом известных координат первого и второго спутников-ретрансляторов (CP) СР1, СР2, векторов их скоростей  координат узла межсетевого сопряжения (УМС) и предварительно заданных частот конвертирования
координат узла межсетевого сопряжения (УМС) и предварительно заданных частот конвертирования  рабочих частот СР1, СР2, вычисляют широту ϕПТ и долготу λПТ пользовательского терминала (ПТ).
рабочих частот СР1, СР2, вычисляют широту ϕПТ и долготу λПТ пользовательского терминала (ПТ).
Для реализации указанного известного способа выполняют следующие операции:
- определяют расстояние  между первым CP1 и ПТ;
между первым CP1 и ПТ;
- определяют расстояние  между вторым СР2 и ПТ;
между вторым СР2 и ПТ;
- измеряют модуль  азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
- вычисляют в УМС доплеровские сдвиги частот  первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно СР1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат СР1, СР2 и определенных параметров
первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно СР1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат СР1, СР2 и определенных параметров 
- определяют, по меньшей мере, один из параметров: радиальную скорость  перемещения первого СР1 относительно ПТ, и/или радиальную скорость
перемещения первого СР1 относительно ПТ, и/или радиальную скорость  перемещения второго СР2 относительно ПТ, с учетом доплеровских сдвигов частот
перемещения второго СР2 относительно ПТ, с учетом доплеровских сдвигов частот 
- вычисляют широту ϕПТ и долготу λПТ ПТ.
Однако данный способ определения местоположения ПТ с использованием двух спутников-ретрансляторов характеризуется:
- длительным временем определения координат ЗС, связанным с необходимостью проведения дополнительных измерений модуля, азимута вектора скорости ПТ и его высоты относительно земной поверхности,
- большой ошибкой определения местоположения пользовательского тер минала в условиях многолучевого распространения радиоволн, связанной с низкой точностью первичных измерений при наличии переотражений радиоволн от различных предметов.
Известен способ уменьшения ошибок многолучевости при оценивании местоположения ИРИ дальномерным способом (см. 3. Р.-С. Chen, "A non-line-of-sight error mitigation algorithm in location estimation," in Proc. IEEE Wireless Communications Networking Conference, vol. 1, pp. 316-320, 1999). Указанный способ заключается в том, что местоположение ИРИ находят по алгоритму взвешенных остатков оценок координат, полученных на основе дальномерных измерений от различных комбинаций приемных станций.
Для реализации указанного известного способа выполняют следующие операции:
- на каждом из N приемных пунктов (ПП) принимают последовательность сигналов от ИРИ и измеряют время ее прихода TOA (Time of Arrival);
- формируют всевозможные комбинации из N>3 приемных пунктов и для каждой комбинации по алгоритму наименьших квадратов вычисляют промежуточную оценку координат (ПОК);
- для каждой комбинации вычисляют сумму квадратов остаточной разности относительно ПОК;
- для каждой ПОК вычисляют вес, который определяется отношением суммы квадратов остаточных разностей к числу ПП в комбинации;
- итоговая оценка координат ИРИ определяется комбинацией ПОК, масштабированных соответствующими весами.
Однако данный способ уменьшения ошибок многолучевости при ОМП ИРИ дальномерным способом характеризуется:
- вероятностью ошибочного назначения весов в случаях, когда имеется больше одного ПП с переотраженными сигналами и, как следствие, большой итоговой ошибкой ОМП (в результате того, что ПП, являющийся источником измерений, полученных в результате переотражений, не исключается из итоговой оценки и, хоть и с уменьшенным весом, все же продолжает вносить погрешность в итоговую оценку местоположения ИРИ);
- продолжительным временем оценивания местоположения, вызванным необходимостью накопления и взвешивания промежуточных оценок на протяжении некоторого интервала времени, что не позволяет использовать указанный способ для определения координат движущихся ИРИ.
Известен способ уменьшения ошибок многолучевости при оценивании местоположения ИРИ разностно-дальномерным способом (см. 4. L. Cong and W. Zhuang, "Non-line-of-sight error mitigation in TDOA mobile location," in Proc. IEEE Globecom, pp. 680-684, Nov 2001). Указанный способ заключается в том, что местоположение ИРИ находят на основе обработки разностно-дальномерных измерений после назначения весов ПП, являющихся вероятными источниками измерений, полученных после переотражений.
Для реализации указанного известного способа выполняют следующие операции:
- на каждом из N приемных пунктов принимают последовательность сигналов от ИРИ и измеряют время ее прихода TOA (Time of Arrival);
- на каждом ПП, являющемся в данном случае опорным, измеряют разности времен прихода сигналов TDOA (Time Difference of Arrival) между опорным и всеми остальными ПП;
- для каждого набора из М ПП (3≤M<N) формируют K комбинаций разностно-дальномерных измерений относительно опорного ПП;
- для каждого упомянутого набора вычисляется промежуточная оценка координат;
- для каждой комбинации ПП определяется сумма квадратов остаточной разности относительно ПОК, на основании которого данной комбинации присваивается соответствующий вес;
- после оценки весов для всех комбинаций относительно каждой опорной станции, каждому приемному пункту присваивается вес, равный сумме весов комбинаций, в которые входит данный ПП;
- далее приемные пункты ранжируются по присвоенным весам в порядке возрастания, после чего ПП с наибольшим весом принимается за источник измерений, полученных в результате переотражений;
- итоговая оценка координат ИРИ определяется комбинацией ПОК, масштабированных соответствующими весами.
Однако данный способ уменьшения ошибок многолучевости при оценивании местоположения ИРИ разностно-дальномерным способом характеризуется:
- зависимостью корректного назначения весов от выбора ПОК для данного набора;
- ошибочным выбором ПОК (например, путем усреднения оценок по комбинациям в данном наборе, или же путем усреднения по всем возможным комбинациям во всех наборах, где может содержаться ПП с переотраженными сигналами), относительно которой вычисляют остаточные разности, что приведет к смещению весов;
- вероятностью ошибочного назначения весов в случаях, когда имеется больше одного ПП с переотраженными сигналами и, как следствие, большой итоговой ошибкой ОМП.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по своей технической сущности является способ для определения местоположения ИРИ разностно-дальномерным методом в условиях многолучевого распространения радиоволн (см. 5. Европейский патент ЕР 3173809, М. кл. G01S 5/06, G01S 5/02, опубл. 31.05.2017), в котором:
- на каждом из N приемных пунктов принимают сигналы от ИРИ и по ним измеряют времена прихода сигналов ТОА, их амплитуду RSSI (Received Signal Strength Indication) и отношение сигнал/шум SNR (Signal to Noise Ratio) для каждого ПП;
- для каждого сигнала приемный пункт, имеющий наименьшее ТОА, выбирают в качестве опорного;
- для каждого сигнала вычисляют разности времен прихода сигналов TDOA (Time Difference of Arrival) между опорным и всеми остальными ПП;
- выявляют ПП, находящиеся в условиях многолучевого распространения радиоволн, и исключают из обработки измеренные TDOA, имеющие наибольший разброс многолучевой задержки ТОА, а также RSSI и SNR у которых оказывается ниже определенного порога;
- из общей совокупности N приемных пунктов составляют все возможные комбинации из трех ПП;
- для каждой комбинации из трех ПП находят промежуточную оценку координат ИРИ методом наименьших квадратов;
- для каждой комбинации рассчитывают остаточные ошибки относительно ПОК, на основании которых составляют ранжированный в порядке возрастания список остаточных ошибок;
- по ранжированному списку находят медиану снизу UM (Up-To-Median), медиану сверху ВМ (Beyond-Median) и среднее арифметическое Mean остаточных ошибок TDOA;
- на основе промежуточных оценок координат ИРИ от всех комбинаций из трех ПП находят итоговую оценку координат ИРИ по критерию минимума одного из показателей - UM, ВМ, Mean, или на основе всех трех показателей.
Однако данный способ характеризуется:
- продолжительным временем оценивания местоположения, вызванным необходимостью приема и измерения времен прихода последовательности сигналов на протяжении некоторого интервала времени;
- невозможностью использовать указанный способ для определения координат движущегося ИРИ.
Техническим результатом изобретения является уменьшение времени оценивания местоположения ИРИ в условиях многолучевого распространения радиоволн (МРРВ), а также обеспечение возможности определения координат движущегося ИРИ.
Достижение указанного технического результата обеспечивается в предлагаемом разностно-дальномерном способе определения местоположения источника радиоизлучения в условиях МРРВ, в котором на каждом из приемных пунктов с известными координатами принимают сигнал ИРИ и по нему измеряют время прихода сигнала, затем для всех возможных пар приемных пунктов с известными координатами измеряют разности времен прихода сигналов от ИРИ до ПП этой пары, вычисляют разности дальностей по измеренным разностям времен прихода сигналов от ИРИ до ПП, формируют набор промежуточных оценок координат ИРИ путем определения разностно-дальномерным способом промежуточной оценки координат (ПОК) для каждой возможной комбинации из трех ПП, выявляют ПП, находящиеся в условиях МРРВ, формируют итоговую оценку координат ИРИ на основе набора промежуточных оценок координат ИРИ с учетом выявленных приемных пунктов, находящихся в условиях многолучевого распространения радиоволн, отличающемся тем, что после формирования набора ПОК ИРИ из этих оценок составляют группы, каждая из которых содержит, по меньшей мере, четыре ПОК ИРИ, для каждой сформированной группы вычисляют внутригрупповую дисперсию ПОК ИРИ, а выявление ПП, находящихся в условиях МРРВ, осуществляют по признаку превышения внутригрупповыми дисперсиями ПОК ИРИ предварительно заданного порога, после чего в наборе ПОК ИРИ оставляют только те ПОК ИРИ, которые получены без использования выявленных ПП, находящихся в условиях МРРВ, а для получения итоговой оценки координат ИРИ вычисляют среднее арифметическое оставшихся в наборе ПОК.
Благодаря перечисленной новой совокупности существенных признаков, в которой новым является выявление ПП, находящихся в условиях МРРВ по единственному сигналу от ИРИ по признаку превышения внутригрупповыми дисперсиями ПОК ИРИ предварительно заданного порога, а для получения итоговой оценки координат ИРИ использование только ПОК от тех ПП, которые не находятся в условиях МРРВ, и вычисление итоговой оценки координат ИРИ как среднего арифметического из ПОК ИРИ, которые не находятся в условиях МРРВ, достигается уменьшение времени выявления одного или нескольких ПП, находящихся в условиях МРРВ, при этом, поскольку уменьшается время выявления одного или нескольких ПП, находящихся в условиях МРРВ, обеспечивается возможность определения координат движущегося ИРИ.
Заявленный способ поясняется чертежами, где:
на фиг. 1 показаны сигнал ИРИ sи(t) и сигналы si(t), i=1, 2, …, N, принятые в i-х ПП;
на фиг. 2 показаны ИРИ, территориально распределенные ПП и расстояния di между ИРИ и i-ми ПП;
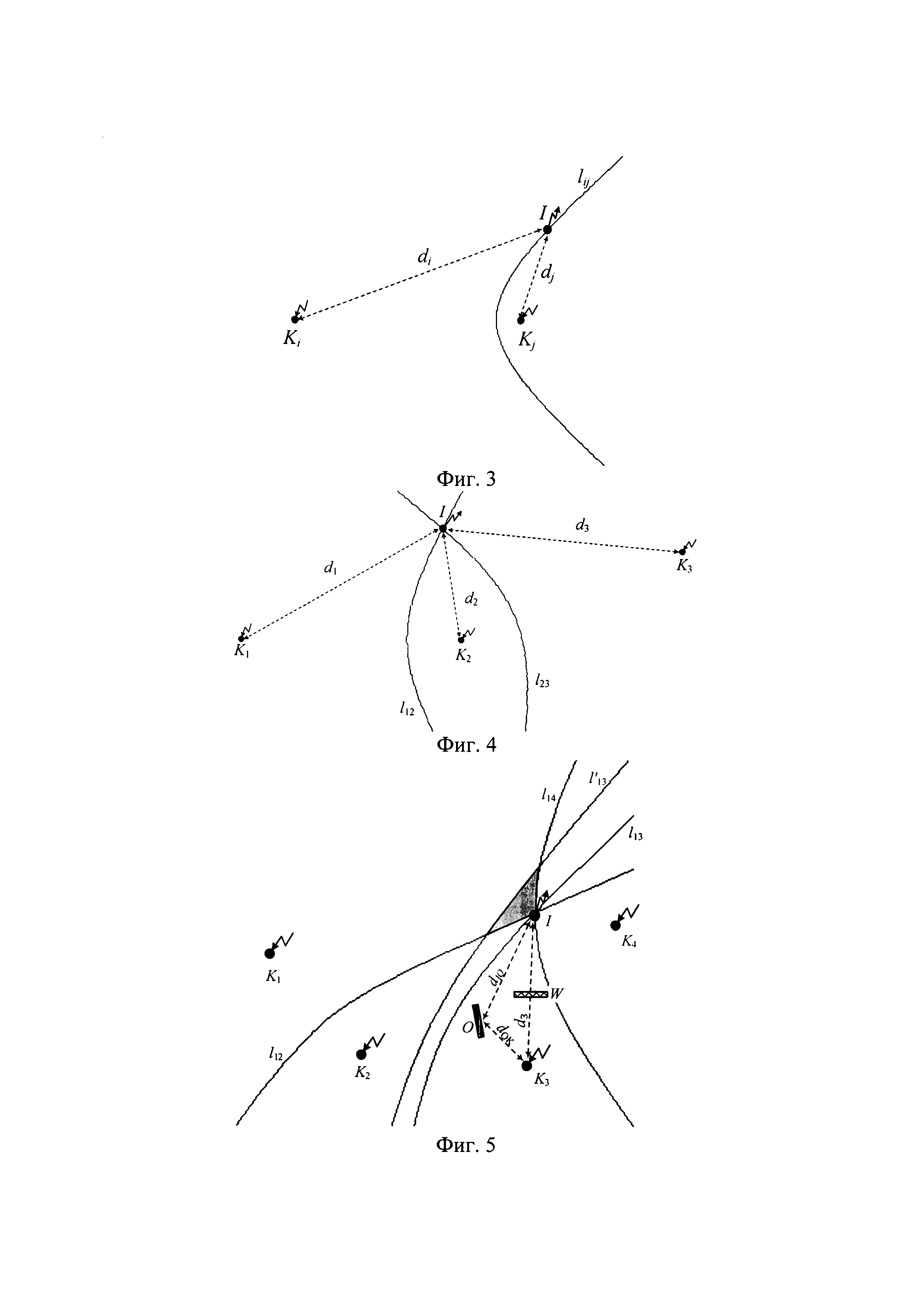
на фиг. 3 показано геометрическое место точек на плоскости в виде гиперболы, образованной разностью расстояний di и dj;
на фиг. 4 показан пример геометрического определения местоположения ИРИ путем пересечения двух гипербол, образованных разностями расстояний от трех ПП;
на фиг. 5 показано геометрическое влияние эффекта отсутствия прямой видимости на ошибку определения местоположения разностно-дальномерным способом;
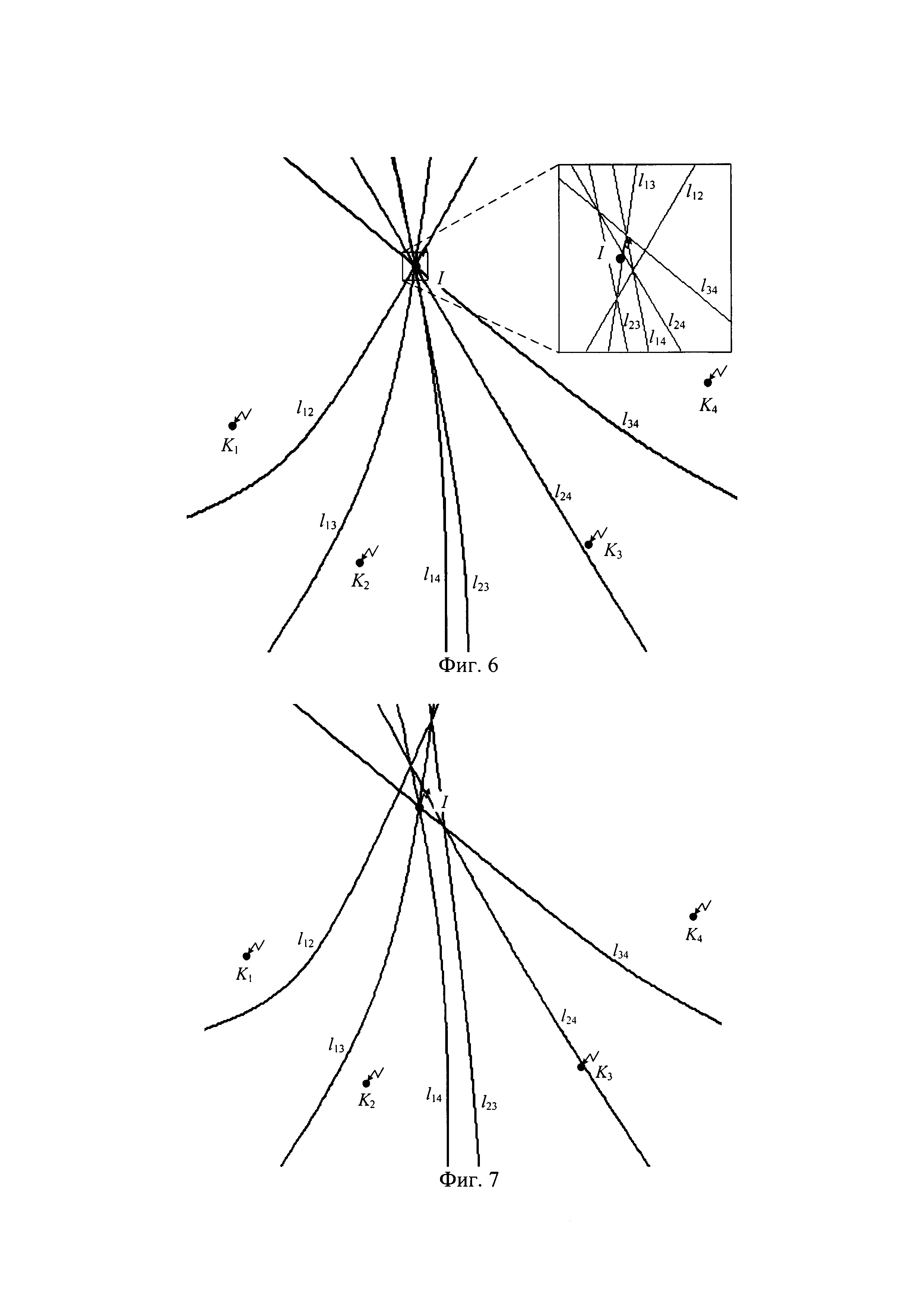
на фиг. 6 рассмотрен пример геометрического определения местоположения ИРИ при использовании четырех ПП в условиях прямой видимости (LOS, Line Of Sight);
на фиг. 7 показан пример возникновения ошибки определения местоположения ИРИ разностно-дальномерным способом при использовании четырех ПП в условиях отсутствия прямой видимости (NLOS, Non Line Of Sight);
на фиг. 8 показан пример промежуточных оценок координат определения местоположения ИРИ разностно-дальномерным способом при использовании четырех ПП в условиях отсутствия прямой видимости (NLOS);
на фиг. 9 показан пример промежуточных оценок координат определения местоположения ИРИ разностно-дальномерным способом при использовании четырех ПП в условиях прямой видимости (LOS);
на фиг. 10 показан пример промежуточных оценок координат определения местоположения ИРИ разностно-дальномерным способом при использовании четырех ПП в условиях отсутствия прямой видимости (NLOS);
на фиг. 11 показан пример эмпирической зависимости дисперсии оценки координат от ОСШ;
на фиг. 12 показан пример ИРИ и пяти территориально распределенных ПП;
на фиг. 13 показан пример разброса ПОК ИРИ для различных групп ПП;
на фиг. 14 показан пример функциональной схемы для реализации предлагаемого способа;
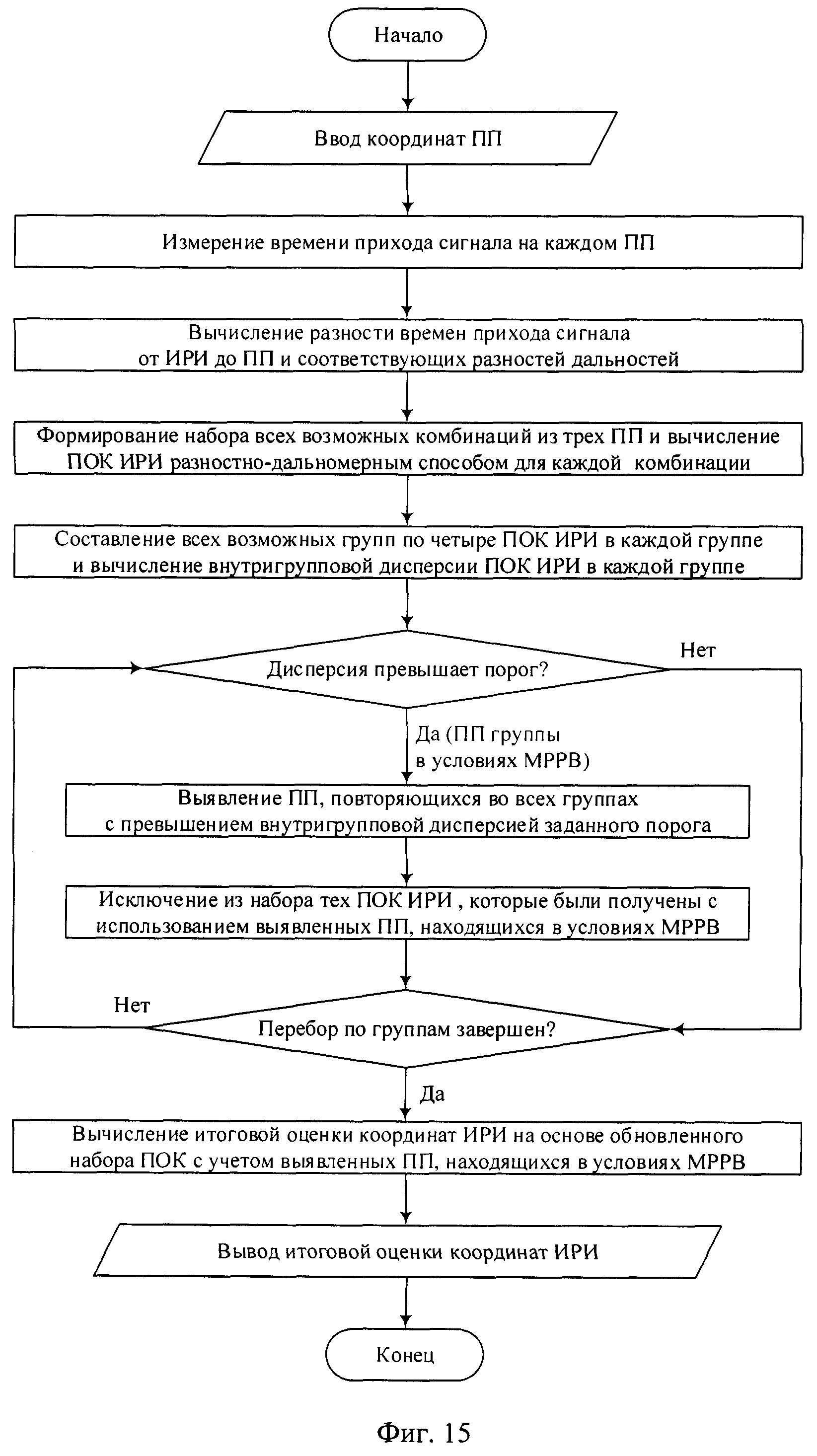
на фиг. 15 показана блок-схема алгоритма реализации предлагаемого способа.
Согласно фиг. 14 в функциональную схему для реализации предлагаемого способа входят следующие последовательно соединенные блоки:
- блок 1 измерения времени прихода сигнала на каждом пункте приема и определения собственных координат ПП посредством модулей Глобальных навигационных спутниковых систем (ГНСС);
- блок 2 вычисления разности времен прихода сигнала от ИРИ до ПП этой пары и вычисления соответствующих разностей дальностей;
- блок 3 формирования набора всевозможных комбинаций из трех пунктов приема и вычисления набора промежуточных оценок координат (ПОК) ИРИ разностно-дальномерным способом для каждой из сформированных комбинаций;
- блок 4 групповой обработки ПОК, оценки внутригрупповой дисперсии ПОК и выявления ПП, находящихся в условиях многолучевого распространения радиоволн (МРРВ);
- блок 5 вычисления итоговой оценки координат ИРИ на основе среднего арифметического из набора промежуточных оценок координат ИРИ с учетом выявленных ПП, находящихся в условиях МРРВ.
Реализация предлагаемого способа в устройстве, приведенном на фиг. 14 с учетом блок-схемы алгоритма, приведенной на фиг. 15, а также фиг. 1-13, осуществляется следующим образом.
Определение местоположения разностно-дальномерным способом производят на основе обработки измеренных разностей времен прихода сигналов (см. фиг. 1), принятых от источника радиоизлучения I синхронизированными территориально распределенными N приемными пунктами K1, K2, …, Ki, …, KN (см. фиг. 2).
Сигнал, принятый i-м приемным пунктом, можно представить выражением:
si(t)=αisи(t-ti)+ni(t), i=1, 2, …, N,
где принятый сигнал αis(t-ti) является задержанной на ti=di/c копией переданного ИРИ сигнала sи(t), ослабленного в αi раз при распространении на расстояние di между ИРИ и i-м приемным пунктом; ni(t) - шум в точке расположения i-го приемного пункта; с - скорость света.
Исходными данными для предлагаемого разностно-дальномерного способа являются известные координаты ПП, получаемые посредством модулей Глобальных навигационных спутниковых систем, а также измеренные на каждом ПП времена прихода сигнала от ИРИ. Зная времена прихода, можно вычислить разности времен прихода сигналов
Δtij=ti-tj, i,j=1, 2, …, N, i≠j,
по которым вычисляются разности дальностей
Δdij=di-dj=c⋅Δtij,
где di - расстояние между ИРИ и i-м ПП (см. фиг. 2); dj - расстояние между ИРИ и j-м ПП.
Пусть (xi,yi) - координаты i-го ПП Ki, (xj,yj) - координаты j-го ПП Kj, (х0,у0) - неизвестные координаты ИРИ, тогда di и dj определяются

Разность дальностей Δdij=di-dj позволяет построить гиперболу  - геометрическое место точек плоскости, для которых абсолютное значение разности расстояний от ИРИ I до пары точек K1 и Kj постоянно (см. фиг. 3).
- геометрическое место точек плоскости, для которых абсолютное значение разности расстояний от ИРИ I до пары точек K1 и Kj постоянно (см. фиг. 3).
При определении местоположения ИРИ на плоскости необходимо найти пересечение как минимум двух гипербол  для чего требуются минимум три ПП K1, K2, K3 (см. фиг. 4).
для чего требуются минимум три ПП K1, K2, K3 (см. фиг. 4).
Рассмотрим качественный пример влияния эффекта отсутствия прямой видимости NLOS (Non-Line-Of-Sight) в условиях многолучевого распространения радиоволн на одном из ПП на точность определения местоположения разностно-дальномерным способом (см. фиг. 5).
При наличии прямой видимости LOS (Line-Of-Sight) каждое измерение разности дальностей Δdij определяет гиперболу, а пересечение гипербол определяет местоположение ИРИ. На фиг. 5 представлена ситуация, когда в определении местоположения участвуют 4 ПП: 3 приемных пункта K1, K2, K4 имеют измерения по прямой видимости LOS; один приемный пункт K3 закрыт препятствием W от ИРИ и имеет измерения NLOS, полученные в результате переотражения от отражателя О, что приводит к увеличению дальномерного измерения с d3 до 
Линии постоянной разности дальностей на фиг. 5 рассчитываются относительно опорного приемного пункта K1. Если бы измерения на всех ПП были бы получены по лучам прямой видимости LOS, гиперболы  пересекались бы в одной точке - истинном местоположении ИРИ, а зона ошибок была бы небольшой, определяемой лишь влиянием шумов ni(t). Из-за отсутствия прямой видимости у приемного пункта K3 получаем следующее: гиперболы
пересекались бы в одной точке - истинном местоположении ИРИ, а зона ошибок была бы небольшой, определяемой лишь влиянием шумов ni(t). Из-за отсутствия прямой видимости у приемного пункта K3 получаем следующее: гиперболы  полученные в результате LOS измерений, пересекаются в одной точке, а гипербола Non LOS (NLOS) измерений
полученные в результате LOS измерений, пересекаются в одной точке, а гипербола Non LOS (NLOS) измерений  смещается и приводит к формированию так называемой зоны ошибок NLOS.
смещается и приводит к формированию так называемой зоны ошибок NLOS.
В заявляемом изобретении ПП с отсутствием прямой видимости выявляются и затем исключаются из процесса ОМП.
Рассмотрим частный пример, когда количество ПП N=4 (см. фиг. 6).
Из четырех ПП можно составить шесть пар приемных пунктов
S2/4={P12, P13, P14, P23, P24, P34}.
Pij={Ki, Kj}, i=1, 2, …, N-1, j=i+1, i+2, …, N,
где Pij - пара приемных пунктов Ki и Kj.
В общем случае количество пар ПП определяется биномиальным коэффициентом из n по k, или числом сочетаний из n по k

В каждой паре ПП можно измерить разность времен прихода сигналов Δtij, по которой можно вычислить разность дальностей Δdij и построить соответствующую гиперболу  Если все ПП находятся в условиях прямой видимости LOS, тогда гиперболы пересекаются в одной точке - истинном местоположении ИРИ (см. фиг. 6).
Если все ПП находятся в условиях прямой видимости LOS, тогда гиперболы пересекаются в одной точке - истинном местоположении ИРИ (см. фиг. 6).
На практике из-за влияния шумов возникают ошибки оценивания Δdij, и гиперболы  отклоняются от точки расположения ИРИ. Однако для большинства реальных ситуаций эти отклонения будут небольшими (см. фиг. 6).
отклоняются от точки расположения ИРИ. Однако для большинства реальных ситуаций эти отклонения будут небольшими (см. фиг. 6).
Если один из ПП закрыт препятствием от ИРИ и имеет измерения NLOS, полученные в результате переотражения, тогда гиперболы не будут пересекаться в одной точке, а будут образовывать так называемый многоугольник засечек (см. фиг. 7), состоящий из множества точек пересечения гипербол друг с другом.
На фиг. 7 показана ситуация, когда в условиях NLOS находится K2, поэтому гиперболы  по прежнему, проходят через точку истинного местоположения ИРИ, так как они получены без участия K2. Если каким-либо образом выявить K2, тогда можно исключить из обработки
по прежнему, проходят через точку истинного местоположения ИРИ, так как они получены без участия K2. Если каким-либо образом выявить K2, тогда можно исключить из обработки  и найти точное местоположение ИРИ.
и найти точное местоположение ИРИ.
В качестве признака, по которому возможно выявлять ПП, находящийся в условиях NLOS, предлагается использовать внутригрупповую дисперсию промежуточных оценок координат ИРИ, суть которой удобно пояснить на примере. Возьмем снова группу из четырех ПП. Согласно (1) из этой группы можно составить четыре комбинации из трех ПП
S3/4={T123, T124, T134, T234}, Tijk={Ki, Kj, Kk],
i=1, 2, …, N-2, j=i+1, i+2, …, N-1, k=j+1, j+2, …, N,
где Tijk - комбинация из трех ПП Ki, Kj и Kk.
Для каждой комбинации из трех ПП можно оценить местоположение ИРИ разностно-дальномерным способом: выделить две пары ПП, построить соответствующие гиперболы, найти точку их пересечения, которую принять за промежуточную оценку координат ИРИ
Mijk=(xijk, yijk),
i=1, 2, …, N-2, j=i+1, i+2, …, N-1, k=j+1, j+2, …, N,
где (xijk, yijk) - координаты ПОК Mjjk.
Например, для комбинации T123 можно выделить пары Р12 и Р23, а точку пересечения гипербол  принять за промежуточную оценку координат M123=(x123, y123) (см. Фиг. 8). Для всех четырех комбинаций {T123, T124, T134, T234} будет получено четыре промежуточных оценки координат {М123, М124, М134, М234}.
принять за промежуточную оценку координат M123=(x123, y123) (см. Фиг. 8). Для всех четырех комбинаций {T123, T124, T134, T234} будет получено четыре промежуточных оценки координат {М123, М124, М134, М234}.
При отсутствии прямой видимости (NLOS) в условиях МРРВ промежуточные оценки координат имеют большой разброс, при этом одна ПОК М134 совпадает с ИРИ 1, так как она получена без использования находящегося в условиях NLOS приемного пункта K2 (см. фиг. 8).
Если все ПП находятся в условиях прямой видимости LOS, то разброс ПОК ИРИ будет небольшим, обусловленным лишь влиянием шумов (см. фиг. 9).
Количественно разброс группы ПОК ИРИ можно оценить с помощью внутригрупповой дисперсии

где r123, r124, r134, r234 - удаления соответственно ПОК М123, М124, М134, М234 от средних координат Мср=(хср,уср) группы из четырех ПП (см. фиг. 10)

i=1, 2, …, N-2, j=i+1, i+2, …, N-1, k=j+1, j+2, …, N,

Для выявления приемных пунктов, находящихся в условиях отсутствия прямой видимости (многолучевого распространения радиоволн), предлагается сравнивать внутригрупповую дисперсию D с некоторым эмпирическим порогом Dпор.
Если дисперсия D превышает порог
D>Dпор,
значит в группе из четырех ПП один или более приемных пунктов находятся в условиях NLOS; если дисперсия не превышает порог
D≤Dпор,
значит все ПП группы находятся в условиях LOS. Для получения эмпирического порога Dпор возможно использовать предварительно полученную эмпирическую зависимость дисперсии оценки координат от отношения сигнал/шум ОСШ (см. фиг. 11).
Имея только четыре ПП, предложенным способом возможно лишь установить факт отсутствия прямой видимости на одном или нескольких ПП.
Для выявления того, какие именно ПП находятся в условиях NLOS необходимо более четырех ПП. Поясним это на примере. Пусть имеется пять ПП (N=5) (см. фиг. 12). В соответствие с (1) из пяти ПП можно составить пять групп по четыре ПП
S4/5={F1234, F1235, F1245, F1345, F2345},
Fijkm={Ki, Kj, Kk, Km},
i=1, 2, …, N-3, j=i+1, i+2, …, N-2,
k=j+1, j+2, …, N-1, m=k+1, k+2, …, N
где Fijkm - группа из четырех приемных пунктов Ki, Kj, Kk, Km
Для каждой группы можно получить четыре ПОК ИРИ и найти их внутри-групповую дисперсию. Пусть опять в условиях NLOS находится K2, тогда группы F1234, F1235, F1245, F2345 будут иметь большую внутригрупповую дисперсию, так как они включают K2, а группа F1345 будет иметь малую внутригрупповую дисперсию, так как она не включает K2 (см. фиг. 13).
Следовательно, для выявления ПП, находящихся в условиях NLOS (многолучевого распространения радиоволн), следует определить какие приемные пункты повторяются во всех группах с превышением внутригрупповой дисперсией заданного порога. После этого следует во всех группах удалить из обработки все ПОК ИРИ, которые получены с использованием выявленных ПП. Итоговую оценку координат ИРИ можно найти, усреднив оставшиеся ПОК ИРИ, например, вычислив их среднее арифметическое.
С учетом указанных особенностей для реализации заявленного изобретения последовательно выполняют следующую последовательность действий (см. фиг. 14):
- на поверхности Земли размещают множество приемных пунктов сигнала; в этих ПП осуществляют в блоке 1 прием сигнала от ИРИ и измерение времени прихода измеренного сигнала, а также определение собственных координат, например, посредством модулей Глобальных навигационных спутниковых систем, которые также решают задачу локальной синхронизации территориально-распределенных ПП;
- из всего множества ПП составляют все возможные пары ПП; для каждой пары ПП в блоке 2 измеряют разность времени прихода сигнала от ИРИ до ПП этой пары; по измеренной разности времени прихода сигнала от ИРИ в каждой паре вычисляют разность дальностей от ИРИ до приемных пунктов этой пары;
- из всего множества ПП формируют в блоке 3 все возможные комбинации по три приемных пункта; для каждой комбинации из трех приемных пунктов разностно-дальномерным способом находят координаты ИРИ, которые принимают за промежуточную оценку координат (ПОК) ИРИ; таким образом формируют набор ПОК ИРИ.
- в блоке 4 из набора ПОК составляют все возможные группы по четыре ПОК;
- для каждой группы вычисляют внутригрупповую дисперсию ПОК ИРИ;
- вычисленную внутригрупповую дисперсию ПОК ИРИ каждой группы сравнивают с заданным эмпирическим порогом; считают, что превышение внутригрупповой дисперсией заданного порога означает наличие в этой группе ПП, находящихся в условиях многолучевого распространению радиоволн;
- для каждой группы, у которой внутригрупповая дисперсия превысила порог, запоминают входящие в ее состав ПП; к выявленным ПП, находящимся в условиях МРРВ, относят те ПП, которые повторяются во всех группах с превышением внутригрупповой дисперсией заданного порога;
- из набора ПОК ИРИ исключают ПОК, которые были получены с использованием выявленных ПП, находящихся в условиях МРРВ;
- вычисляют в блоке 5 итоговую оценку координат ИРИ на основе обновленного набора ПОК ИРИ с учетом исключенных ПОК, полученных с использованием выявленных ПП, находящихся в условиях МРРВ.
Имитационное моделирование заявленного способа определения местоположения ИРИ в специальном программном обеспечении Matlab показало уменьшение времени измерения координат источника радиоизлучений по сравнению со способом прототипом на 10…20% (в зависимости от продолжительности накопления измерений сигналов в способе прототипе), при решении задачи оценивания местоположения ИРИ по единственному измеренному сигналу в условиях многолучевого распространения радиоволн, что указывает на возможность достижения указанного технического результата.
Разностно-дальномерный способ определения местоположения источника радиоизлучения (ИРИ) в условиях многолучевого распространения радиоволн (МРРВ), в котором на каждом из приемных пунктов (ПП) с известными координатами принимают сигнал ИРИ и по нему измеряют время прихода сигнала, для всех возможных пар ПП вычисляют разности времен прихода сигналов от ИРИ до ПП этой пары и по ним вычисляют соответствующие разности дальностей, формируют набор промежуточных оценок координат (ПОК) ИРИ путем определения разностно-дальномерным способом промежуточной оценки координат для каждой возможной комбинации из трех ПП, выявляют ПП, находящиеся в условиях МРРВ, формируют итоговую оценку координат ИРИ на основе набора промежуточных оценок координат ИРИ с учетом выявленных приемных пунктов, находящихся в условиях МРРВ, отличающийся тем, что после формирования набора ПОК ИРИ из этих оценок составляют группы, каждая из которых содержит, по меньшей мере, четыре ПОК ИРИ, для каждой сформированной группы вычисляют внутригрупповую дисперсию ПОК ИРИ, а выявление ПП, находящихся в условиях МРРВ, осуществляют по признаку превышения внутригрупповыми дисперсиями ПОК ИРИ предварительно заданного порога, после чего в наборе ПОК ИРИ оставляют только те ПОК ИРИ, которые получены без использования выявленных ПП, находящихся в условиях МРРВ, а для получения итоговой оценки координат ИРИ вычисляют среднее арифметическое оставшихся в наборе ПОК.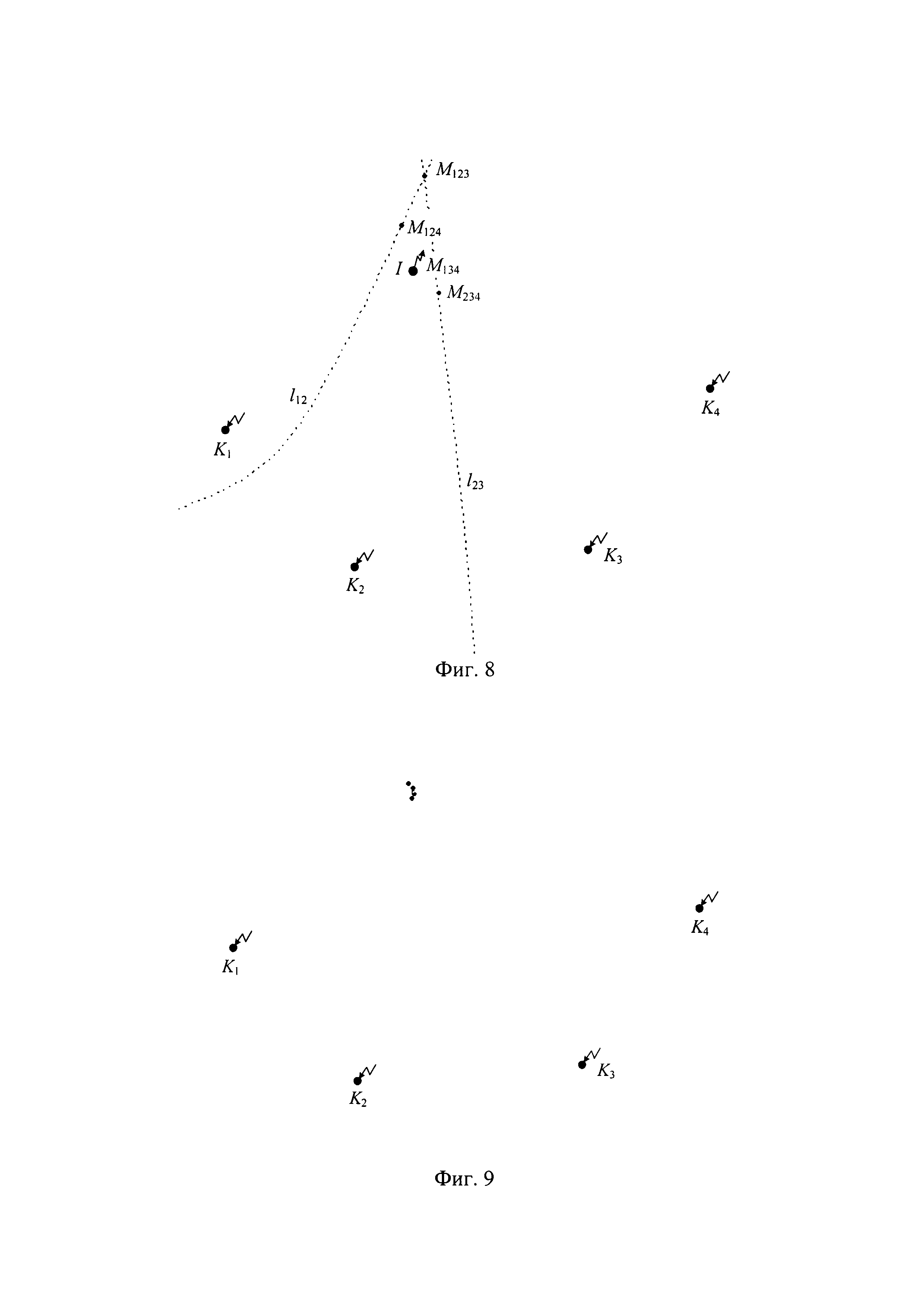
Способ определения местоположения сканирующей рлс пассивным многолучевым пеленгатором
Шарообразный робот (варианты)
Мультиагентная робототехническая система
Способ определения расстояния до неоднородности или повреждения двухпроводной линии по ее рефлектограмме
Устройство для ведения прицельного огня
Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля
Способ изготовления пластинчатого щелевого теплообменника
Трансмиссия наземного транспортного средства на базе вальной коробки перемены передач
Способ синхронизации часов в цифровых сетях
Способ синхронизации часов в цифровых сетях
Всенаправленная антенна излучения
Устройство для определения параметров движения цели
Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе
Устройство для образования скважин в грунте ударным способом
Устройство для определения параметров движения цели
Способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов
Многопозиционная система посадки воздушных судов
Способ определения координат источника радиоизлучений с борта летательного аппарата
Способ поляризационного пеленгования радиосигналов
Способ определения местоположения сканирующей рлс пассивным многолучевым пеленгатором

