Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ
Вид РИД
Изобретение
Изобретение относится к области радиолокации, в частности к методам определения траектории цели в разнесенной радиолокации.
Обычно высота полета цели в существующих РЛС определяется расчетным способом, по измеренному значению наклонной дальности и угла места цели при известной высоте антенны РЛС и эффективном радиусе земли (см. Бакулев П.А. Радиолокационные системы. - М.: Радиотехника, 2004, 320 с. стр. 273). При этом для обеспечения требуемой точности измерения угла места цели необходимо иметь большие габариты антенны в вертикальной плоскости.
Кроме того, высоту цели можно определять методом V-луча (см. Бакулев П.А. Радиолокационные системы. - М.: Радиотехника, 2004, 320 с. стр. 274 рис. 12.1), при котором антенная система радиолокатора имеет два луча: вертикальный и наклонный, причем плоскость последнего составляет угол 45 град., с плоскостью вертикального луча. Для определения этим методом требуется наличие двух антенных систем, двух приемных трактов и необходимость вращения антенны приемной позиции в горизонтальной плоскости, что в ряде случаев усложняет конструкцию приемной позиции антенн бистатической РЛС.
Известен также метод парциальных диаграмм, применимый для определения высоты цели (см. Теоретические основы радиолокации. Под. ред. В.Е. Дулевича. - М.: Сов. радио, 1964. 732 с., стр. 75 рис. 2.40), сущность которого заключается в создании антенной системой большого числа игольчатых лучей, расходящихся веером в вертикальной плоскости. Сигналы, принятые отдельными лучами, поступают в соответствующие приемники. Угол места грубо определяется по номеру лепестка, по которому принят сигнал. Уточнение угла места в пределах лепестка производится методом сравнения фаз и амплитуд. К недостаткам метода можно отнести усложнение аппаратуры за счет многоканальности приемо-усилительного тракта и применения метода сравнения сигналов при точном измерении угла места.
Известно устройство для определения параметров движения цели (см. Патент на изобретение РФ №2124220, М.кл. G01S 13/06, опубл. 27.12.1998 г.), содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, последовательно соединенной с приемным устройством, детектором и фильтром низких частот, выход которого соединен с входами блока измерения направления прихода интерференционного сигнала и входами блока измерения доплеровской частоты, выход блока измерения направления прихода интерференционного сигнала соединен в первыми входами блока экстраполяции измеряемых параметров и блока вычисления траекторных параметров, причем один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а другой вход - с выходом блока измерения доплеровской частоты, выход блока экстраполяции измеряемых параметров соединен со входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, выход блока вычисления траекторных параметров является выходом системы.
Известно также устройство для реализации радиолокационного способа определения параметров движения объекта (см. Патент на изобретение РФ №2133480, М.кл. G01S 3/72, G01S 7/42, опубл. 20.07.1999 г.), содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, последовательно соединенной с приемным устройством, детектором и фильтром низких частот, выход которого соединен с входами блока измерения направления прихода интерференционного сигнала и входами блока измерения доплеровской частоты, выход блока измерения доплеровской частоты соединен со входом блока определения поверхности положения, выход которого соединен с первым входом блока вычисления траекторных параметров, второй вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, выход блока вычисления траекторных параметров является выходом системы.
Известно устройство для определения параметров движения объекта (см. Патент на изобретение РФ №2154840, М.кл. G01S 13/06, опубл. 20.08.2000 г.), содержащее передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, выход которого соединен со входами блока измерения доплеровской частоты и входами блока измерения направления прихода интерференционного сигнала, блока экстраполяции измеряемых параметров, один вход которого соединен с выходом блока измерения доплеровской частоты, второй вход - с выходом блока измерения направления прихода интерференционного сигнала, а выход соединен со входом блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения, соединенного одним своим входом с выходом блока вычисления момента времени пересечения целью линии базы, вторым - с выходом блока экстраполяции измеряемых параметров, а выходом с одним из входов блока вычисления траекторных параметров, другой вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала и блок конечного вычисления траекторных параметров, причем один вход блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала соединен с выходом блока измерения направления прихода интерференционного сигнала, второй вход - с выходом блока измерения доплеровской частоты, а выход соединен с одним из четырех входов блока конечного вычисления траекторных параметров, другие три входа которого раздельно соединены с выходами блока измерения направления прихода интерференционного сигнала, блока измерения доплеровской частоты и блока вычисления траекторных параметров, при этом выходом всего устройства является выход блока конечного вычисления траекторных параметров.
Кроме того, в (см. Патент на изобретение РФ №2168740, М.кл. G01S 13/06, опубл. 10.06.2001 г.) рассмотрено устройство для определения параметров движения цели, содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, имеющим N парциальных каналов, выходы которых соединены с соответствующими входами блока измерения доплеровской частоты и блока измерения направления прихода интерференционного сигнала, каждый из N парциальных каналов состоит из приемника, и содержащую также блок экстраполяции измеряемых параметров, блок вычисления момента времени пересечения целью линии базы и блок определения поверхности положения, выход которого соединен с одним из входов блока вычисления траекторных параметров, другой вход блока вычисления траекторных параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход является выходом всего устройства, один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход - с входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, блока деления опорного напряжения, вход которого является одним из входов приемного устройства, а один из выходов соединен непосредственно с входом соответствующего приемника, в остальные N-1 парциальных каналов введены суммирующие устройства, один из входов которых является входов приемного устройства, а другой соединен с соответствующим выходом блока деления опорного напряжения, выход каждого суммирующего устройства соединен с соответствующим приемником, кроме того, в устройство введен блок идентификации сигналов по частоте и вычитания ложных сигналов, вход которого соединен с выходом блока измерения доплеровской частоты, а выход - с одним из входов блока экстраполяции измеряемых параметров.
Известно также устройство для определения параметров движения цели (см. Патент на полезную модель РФ №107370, М.кл. G01S 13/06, опубл. 10.08.2011 г.), содержащее передающую позицию, состоящую из передатчика и передающей антенны, и находящуюся в удаленной от нее точке приемную позицию, состоящую из приемной антенны, двух цепей, включающих в себя последовательно соединенные приемник, детектор и фильтр нижних частот, при этом выходы фильтров нижних частот первой и второй цепей соединены соответственно с первым и вторым входами блока измерения направления прихода интерференционного сигнала, выход которого соединен с первым входом блока вычисления траекторных параметров, выход которого является выходом устройства, а также первого блока измерения доплеровской частоты, вход которого соединен с выходом фильтра нижних частот первой цепи, а первый выход приемной антенны соединен с входом приемника первой цепи, передающая позиция содержит последовательно соединенные второй передатчик и блок суммирования, второй вход которого соединен с выходом первого передатчика, а выход соединен с входом передающей антенны, приемная позиция дополнительно содержит блок разделения, вход которого соединен со вторым выходом приемной антенны, а его первый выход соединен с входом приемника второй цепи, третью цепь, состоящую из последовательно соединенных приемника, детектора и фильтра нижних частот, причем вход приемника третьей цепи соединен со вторым выходом блока разделения, последовательно соединенные измеритель разности фаз, первый и второй входы которого соединены соответственно с выходами фильтров нижних частот второй и третьей цепей, и блок оценки суммарной дальности, выход которого соединен со вторым входом блока вычисления траекторных параметров, последовательно соединенные второй блок измерения доплеровской частоты, вход которого соединен с выходом фильтра нижних частот третьей цепи, и блок оценки скорости изменения направления прихода интерференционного сигнала, второй вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, третий вход соединен с выходом первого блока измерения доплеровской частоты, а выход подключен к третьему входу блока вычисления траекторных параметров, к четвертому входу которого подключен выход блока масштабирования, вход которого соединен с выходом первого блока измерения доплеровской частоты.
Известно также устройство для определения параметров движения цели (см. Патент на полезную модель РФ №109869, М.кл. G01S 3/46, опубл. 27.10.2011 г.), содержащее передающую позицию, состоящую из последовательно соединенных передатчика и антенны, и в удаленной от нее точке приемную позицию, которая состоит из антенны приемной позиции, имеющей N выходов, каждый из которых, кроме центрального, соединен с одним из входов соответствующего суммирующего устройства, выход которого соединен с соответствующим приемником, а центральный выход антенны соединен с блоком деления опорного напряжения, один из выходов которого соединен непосредственно с входом приемника центрального парциального канала, а остальные N-1 выходов соединены со вторыми входами суммирующих устройств соответствующих парциальных каналов, блока определения азимутального положения диаграммы направленности антенны передающей позиции, вход которого подключен ко второму выходу приемника центрального парциального канала, а выход подключен ко второму входу блока вычисления траекторных параметров, при этом передатчик передающей позиции содержит последовательно соединенные блок синхронизации, синтезатор частоты, усилитель мощности и блок управления лучом, второй вход которого соединен со вторым выходом блока синхронизации, а выход соединен с входом передающей антенны, при этом выходы приемника каждого из парциальных каналов раздельно соединены с соответствующими входами блока измерения направления прихода интерференционного сигнала, выход которого соединен с первым входом блока вычисления траекторных параметров, выход которого является выходом всего устройства. Данное устройство выбрано в качестве прототипа.
Все перечисленные аналоги не обеспечивают возможности определения высоты полета цели в случае, когда приемная антенна имеет широкую диаграмму направленности в вертикальной плоскости.
Достигаемым техническим результатом является обеспечение возможности определения высоты полета цели при широкой диаграмме направленности приемной антенны в вертикальной плоскости.
Это достигается тем, что устройство для определения параметров движения цели, содержащее передающую позицию, состоящую из последовательно соединенных передатчика и антенны, и в удаленной от нее точке приемную позицию, которая состоит из антенны приемной позиции, имеющей N выходов, где N - число парциальных взаимно перекрытых по уровню половинной мощности приемных пространственных каналов, каждый из выходов, кроме центрального, соединен с одним из входов соответствующего суммирующего устройства, выход которого соединен со входом соответствующего приемника, а центральный выход антенны соединен со входом блока деления опорного напряжения, имеющего N выходов, соответствующий выход которого соединен непосредственно с входом приемника центрального парциального канала, а остальные N-1 выходов соединены со вторыми входами суммирующих устройств соответствующих парциальных каналов, блока определения азимутального положения диаграммы направленности антенны передающей позиции, вход которого подключен ко второму выходу приемника центрального парциального канала, а выход подключен ко второму входу блока вычисления траекторных параметров, при этом передатчик передающей позиции содержит последовательно соединенные блок синхронизации, синтезатор частоты, усилитель мощности и блок управления лучом, второй вход которого соединен со вторым выходом блока синхронизации, а выход соединен с входом передающей антенны, при этом выходы приемника каждого из парциальных каналов раздельно соединены с соответствующими входами блока измерения направления прихода интерференционного сигнала, выход которого соединен с первым входом блока вычисления траекторных параметров, отличается тем, что введены последовательно соединенные блок измерения доплеровской частоты, блок экстраполяции измеряемых параметров (зависимостей частоты Доплера и углового направления на цель во времени), блок вычисления момента пересечения целью линии базы и блок определения поверхности положения, выход которого соединен с третьим входом блока вычисления траекторных параметров, а также блок расчета высоты полета цели, причем соответствующий вход блока измерения доплеровской частоты соединены с выходом соответствующего приемника, второй вход блока экстраполяции измеряемых параметров подключен к выходу блока измерения направления прихода интерференционного сигнала и к первому входу блока расчета высоты полета цели, связанному также с первым выходом блока вычисления траекторных параметров, второй вход блока определения поверхности положения соединен с выходом блока экстраполяции измеряемых параметров, второй вход блока расчета высоты полета цели соединен с выходом блока определения азимутального положения диаграммы направленности антенны передающей позиции, третий вход блока расчета высоты полета цели соединен с выходом блока вычисления траекторных параметров, а выход блока расчета высоты полета цели является выходом всего устройства.
Достижение технического результата указанными отличительными признаками можно пояснить следующим образом.
В предлагаемом устройстве, в отличие от устройства, принятого за прототип, путем определения углового положения ДНА передающей позиции определяется азимут цели относительно нее - βТ, на приемной позиции измеряется азимут цели относительно приемной позиции βR, и по результатам этих измерений при известной базе путем решения триангуляционной задачи определяются прямоугольные координаты цели X и Y.
За счет экстраполяции измеряемых функциональных зависимостей fR(t) - частоты Доплера от времени и βR(t) - углового направления на цель от времени, определяется экстраполированный момент времени пересечения целью линии базы из условия равенства нулю экстраполированных функциональных зависимостей.
Таким образом, используя несколько измеряемых значений fR(t) и βR(t), производится экстраполяция зависимостей fR(t) и βR(t), по которым определяется момент времени пересечения целью линии базы до прихода к ней цели, затем определяется суммарная дальность RΣ(t) - расстояние передающая позиция - цель-приемная позиция.
Пространственные координаты цели однозначно находятся как координаты точки пересечения поверхности положения и линии направления на цель из приемной позиции (линии пеленга). После чего производится вычислительная процедура по определению высоты полета цели по вычисленным значениям X, Y и RΣ. Предлагаемое устройство не накладывает ограничений на узкую диаграмму направленности антенны в угломестной плоскости, а следовательно, допускает применение антенн с малыми габаритами в вертикальной плоскости.
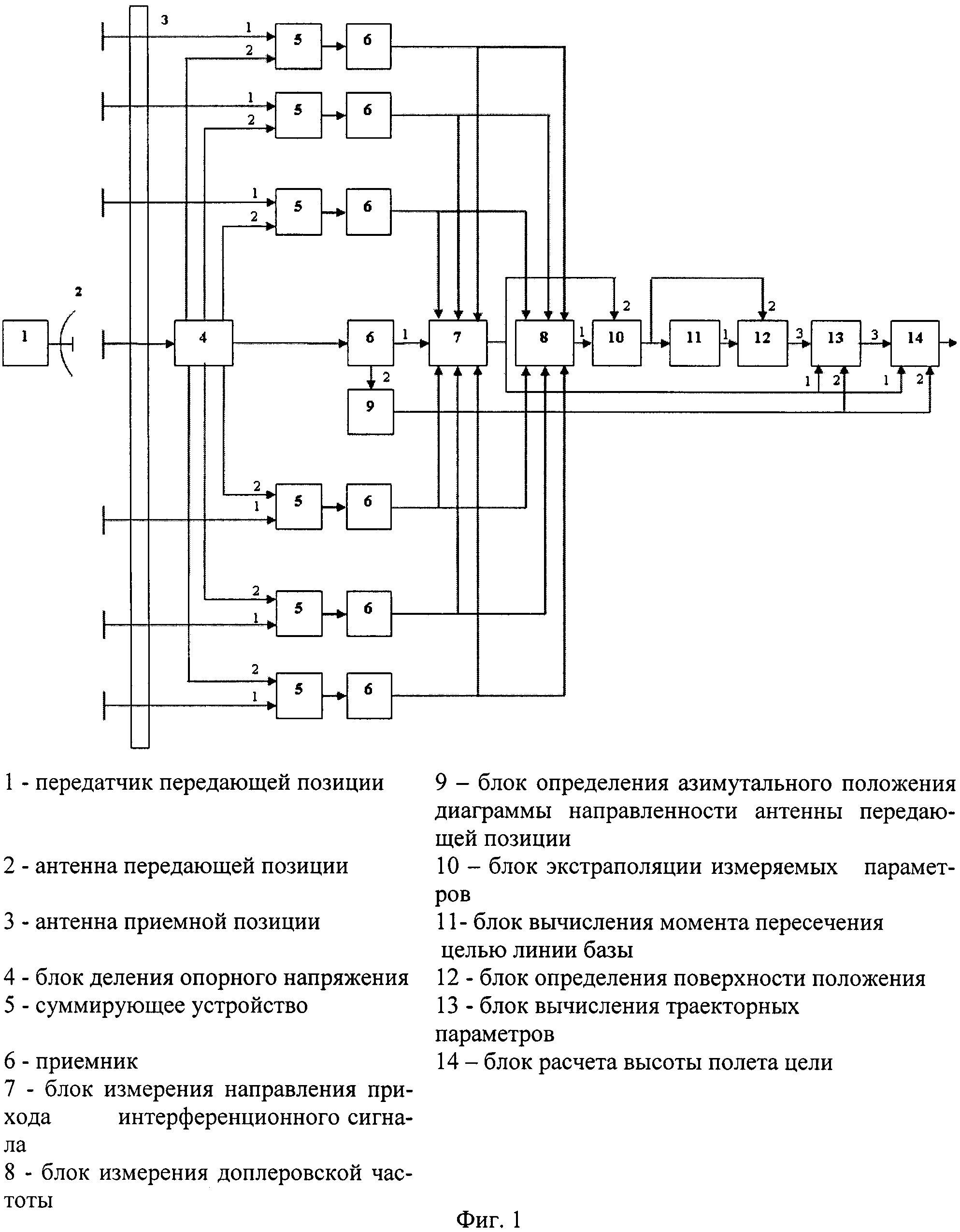
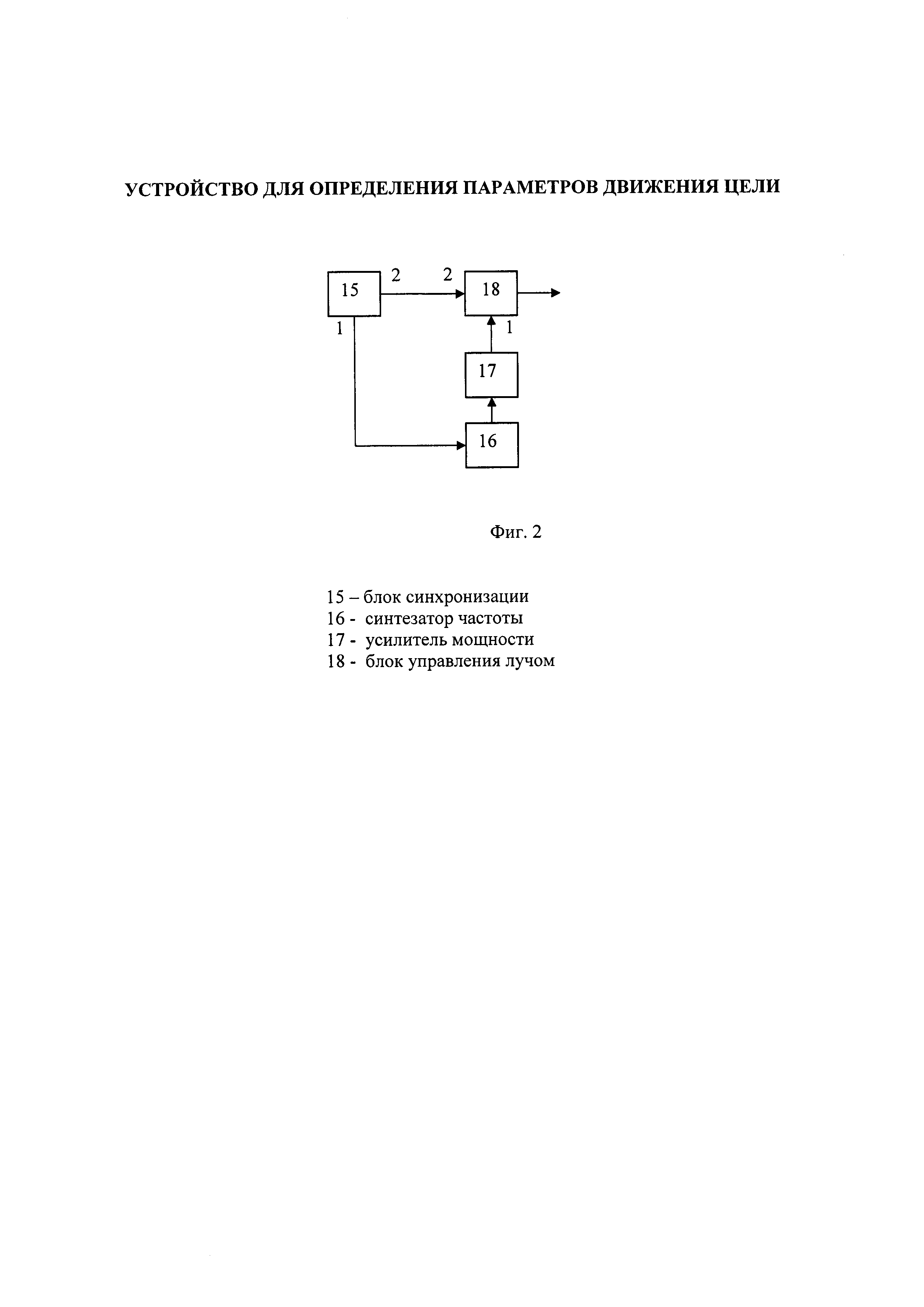
Предложенное устройство поясняется чертежами, где на фиг. 1 приведена структурная схема заявляемого устройства, на фиг. 2 представлен возможный вариант структурной схемы передатчика передающей позиции, на фиг. 3 представлены основные геометрические соотношения в бистатической РЛС при решении триангуляционной задачи; на фиг. 4 приведены геометрические соотношения, поясняющие вычисление высоты полета цели, на фиг. 5 и фиг. 6 приведены среднеквадратические ошибки (СКО) определения высоты полета цели при различных условиях.
Согласно фиг. 1 предлагаемое устройство содержит передатчик 1 передающей позиции, антенну 2 передающей позиции, антенну 3 приемной позиции, блок 4 деления опорного напряжения, суммирующие устройства 5, приемники 6, блок 7 измерения направления прихода интерференционного сигнала, блок 8 измерения доплеровской частоты, блок 9 определения азимутального положения ДНА передающей позиции, блок 10 экстраполяции измеряемых параметров (зависимостей частоты Доплера и углового направления на цель во времени); блок 11 вычисления момента пересечения целью линии базы; блок 12 определения поверхности положения; блок 13 вычисления траекторных параметров, 14 блок вычисления высоты полета цели.
При этом на передающей позиции передатчик 1 соединен с антенной 2, а приемная позиция состоит из антенны 3 приемной позиции, имеющей N выходов, каждый из которых, кроме центрального, соединен с одним из входов соответствующего суммирующего устройства 5, выход которого соединен с соответствующим приемником 6, а центральный выход антенны 3 соединен со входом блока 4 деления опорного напряжения, один из выходов которого соединен непосредственно с входом приемника 6 центрального парциального канала, а остальные N-1 выходов соединены со вторыми входами суммирующих устройств 5 соответствующих парциальных каналов, выходы приемников 6 подключены к соответствующим входам блока 7 измерения направления прихода интерференционного сигнала, выходы всех приемников 6, кроме центрального подключены к соответствующим входам блока 8 измерения доплеровской частоты, связанным также с соответствующими входами блока 7 направления прихода интерференционного сигнала, выход блока 8 измерения доплеровской частоты подключен к первому входу блока 10 экстраполяции измеряемых параметров, второй вход которого соединен с выходом блока 7 измерения направления прихода интерференционного сигнала и с первыми входами блока 13 вычисления траекторных параметров и блока 14 расчета высоты полета цели, вторые входы блока 13 и 14 соединены с выходом блока 9 определения азимутального положения диаграммы направленности антенны передающей позиции, выход блока 10 экстраполяции измеряемых параметров соединен с входом блока 11 вычисления момента пересечения целью линии базы и вторым входом блока 12 определения поверхности положения, первый вход которого соединен с выходом блока 11 вычисления момента пересечения целью линии базы, а выход блока 12 определения поверхности положения соединен с третьим входом блока 13 вычисления траекторных параметров, а выход которого соединен с третьим входом блока 14 расчета высоты полета цели, выход которого является выходом всего устройства.
Согласно фиг. 2 возможный вариант структурной схемы передатчика передающей позиции содержит последовательно соединенные блок 15 синхронизации, синтезатор 16 частоты, усилитель 17 мощности, блок 18 управления лучом, второй вход которого соединен со вторым выходом блока 15 синхронизации, а выход блока 18 управления лучом служит для подключения к передающей антенне 2.
Рассмотрим в качестве примера работы предлагаемого устройства локальную радиотехническую систему координат с началом в точке стояния приемной позиции, ось X которой направлена вдоль линии базы, соединяющей передающую и приемную позиции, ось Y перпендикулярна оси X.
Блок 15 синхронизации по своему первому выходу формирует команды управления блоком 18 управления лучом, который осуществляет управление антенной 2 передающей позиции с шириной диаграммы направленности (ДНА) по уровню половинной мощности θβ. Одновременно по своему второму выходу блок 15 синхронизации формирует команды управления синтезатором 16 частот.
При этом антенна 2 передающей позиции, сканируя дискретно с шагом Δβ в заданном секторе ψβТ, излучает непрерывный (смодулированный) сигнал на различных частотах, формируемых синтезатором 15 частот, которые, усиливаясь в усилителе 17 мощности, излучаются в определенные направления сектора наблюдения (фиг. 3).
Начальное значение азимутального направления зондирования βТ0 определяется границей сектора сканирования ψβ (точка 1 на фиг. 3).
При нахождении ДНА передающей позиции в начальном значении азимутального направления зондирования βТ0 производится излучение на частоте f0. Блок 15 синхронизации формирует цифровые коды для управления блоком 18 управления лучом, который обеспечивает перемещение луча ДН антенны 2 передающей позиции в горизонтальной плоскости.
Одновременно блок 15 синхронизации вырабатывает команды управления для синтезатора 16 частоты, который генерирует значение частоты fi, соответствующее текущему направлению зондирования. В процессе обзора пространства при перемещении ДНА передающей позиции на угол Δβ=θβ происходит дискретное изменение частоты зондирующего сигнала, формируемого в синтезаторе 16 частоты, на величину Δf. Величина Δf должна удовлетворять условию: Δf≥2FRΣmax, где FRΣmax - максимальное значение суммарной доплеровской частоты. Поскольку количество азимутальных дискретных направлений излучения передающей позиции определяется формулой: Nβ=ψβ/θβ, то текущее азимутальное положение ДНА передающей позиции βTi относительно некоторого начального значения βT0 (точка 1, фиг. 3), соответствующее i-му номеру направления излучения Nβi, определяется зависимостью: βTi=βT0+(Nβ-1)Δβ. Полагая, что количество азимутальных дискретных направлений ДНА передающей позиции Nβ равно количеству излучаемых дискретных частот Nf в соответствующие азимутальные направления, то текущее значение несущей частоты fi зондирующего сигнала, формируемое синтезатором 16 частот, относительно некоторого значения f0, соответствующего излучению в начальный угловой сектор ΔT0, определим по формуле: fi=f0+(Nf-1)Δf.
Таким образом, по значению текущей несущей частоты сигнала fi можно определить значение βTi текущего азимутального положения ДНА передающей позиции.
Значение текущего положения азимутального направления облучения цели передающей позицией βTi может быть задано таблично, в зависимости от измеренного значения частоты fi, принятого центральным лучом антенны 3 приемной позиции. Данная процедура производится на приемной позиции в блоке 9 определения азимутального положения ДНА передающей позиции.
В антенне 3 приемной позиции формируются N парциальных взаимно перекрытых по уровню половинной мощности приемных пространственных каналов с шириной ДНА по уровню половинной мощности θβ. Прямой сигнал, образованный ДНА передающей позиции, в том числе и ее боковых лепестков, излучаемых в соответствующий момент времени обзора в соответствующее направление βTi зоны обзора, принимается центральным (главным) лепестком ДНА приемных пространственных каналов приемной позиции. Прямой сигнал используется как опорный, анализируя значение частоты которого можно определить направление излучения на передающей позиции.
Далее в блоке 7 измерения направления прихода интерференционного сигнала формируется значение азимута цели относительно приемной позиции βR (см. Патент на полезную модель РФ №109869).
Измеренные значения βR поступают на второй вход блока 13 вычисления траекторных параметров.
Измеренные значения βТ поступают с выхода блока 9 определения азимутального положения ДНА передающей позиции на второй вход блока 13 вычисления траекторных параметров. В блоке 13 вычисления траекторных параметров производится вычисление дальности до цели по результатам решения задачи триангуляции относительно приемной позиции по формуле:
 ,
,
а затем происходит определение прямоугольных координат цели по формулам:

Известно (см. Патент РФ №2124220 формула 1), что доплеровский сдвиг частоты (то есть частота интерференционного сигнала биений) эхо-сигнала на трассе передающая позиция-цель-передающая позиция описывается уравнением

где RΣ(t) - суммарное расстояние передатчик-цель-приемник.
Величина RΣ определяет поверхность положения в пространстве (см. Справочник по радиолокации, т. 4 под ред. М. Сколника, М., Сов. Радио, 1978), которая представляет собой эллипсоид вращения с фокусами, расположенными в точках местоположения приемной и передающей антенн; λ - длина волны излучения; fR(t) - доплеровский сдвиг частоты. Интегрируя (2) на интервале (t0, t), получим (см. Патент на полезную модель РФ №109869)

где RΣ0 - начальное (в момент времени t0 начальных траекторных измерений) значение RΣ(t0).
Если учесть, что в момент времени пересечения целью линии базы (tП) значение RΣ(t) известно точно и равно длине линии базы L, то для R0 из (3) получим следующее значение:

Подставив (4) в (3), получим
Согласно выражениям (5), (6) при t≥tП (после пересечения целью линии базы) оценку  суммарной дальности можно найти, интегрируя на интервале (tП, t) оценку
суммарной дальности можно найти, интегрируя на интервале (tП, t) оценку  доплеровской частоты принимаемого сигнала. При t<tП оценка
доплеровской частоты принимаемого сигнала. При t<tП оценка  на интервале (t, tП) неизвестна.
на интервале (t, tП) неизвестна.
При определении оценки
с использованием выражений (5), (6) момент tП пересечения целью линии базы точно не известен, так как при β=0 доплеровский сдвиг частоты fR=0 [это непосредственно следует из выражения (1)] и сигналы целей не наблюдаются в некоторой области малых значений fR (зоны режекции), в которой значения доплеровской частоты не превосходят ширины зоны режекции доплеровских частот приемного устройства. Зона режекции необходима для устранения отраженного сигнала от подстилающей поверхности и прямого сигнала передатчика.
Поэтому вместо tП в выражениях (5), (6) необходимо использовать оценку  момента пересечения целью линии базы, которую можно найти как решение одного из уравнений
момента пересечения целью линии базы, которую можно найти как решение одного из уравнений  или
или  , где
, где  и
и  - экстраполированные на зону режекции оценки измеряемых координат.
- экстраполированные на зону режекции оценки измеряемых координат.
На основе данных, получаемых из блока 7 измерения направления прихода интерференционного сигнала и блока 8 измерения доплеровской частоты, в блоке 10 экстраполяции измеряемых параметров осуществляется экстраполяция функциональных зависимостей частоты Доплера и направления прихода интерференционного сигнала от времени.
В блоке 10 экстраполяции измеряемых параметров осуществляется экстраполяция измеренных значений доплеровской частоты и угла прихода интерференционного сигнала на момент пересечения целью линии базы. Будем полагать, что данные измерений fR и βR поступают с выходов блока 7 измерения направления прихода интерференционного сигнала и блока 8 измерения доплеровской частоты дискретно. Ошибки измерения будем считать независимыми. При полиномиальной модели измерения описываемых параметров экстраполированные зависимости будут представляться в виде:


Из уравнений (7), (8) видно, что для получения функциональных зависимостей частоты Доплера  и направления прихода интерференционного сигнала
и направления прихода интерференционного сигнала  от времени необходимо вычислить по нескольким измерениям βR и fR коэффициенты аk и сk.
от времени необходимо вычислить по нескольким измерениям βR и fR коэффициенты аk и сk.
Для примера остановимся на вычислении аk коэффициентов. В матричном виде уравнение (6) для нескольких измеренных значений βR можно записать в виде:

где: 
k - порядок полиномиальной модели; βR0(t0), βR1(t1), …, βRk(tk) - величины измеряемых угловых коэффициентов в моменты времени t0, t1, …, tk.
Вычисление оптимальных коэффициентов  в этой модели по критерию наименьших квадратов сводится к решению матричного уравнения
в этой модели по критерию наименьших квадратов сводится к решению матричного уравнения

Подставляя полученные значения коэффициентов в уравнения (7) и (8), получим функциональные зависимости  и
и  на интервале времени, следующем за моментом времени последнего измерения входных данных.
на интервале времени, следующем за моментом времени последнего измерения входных данных.
С блока 10 экстраполяции измеряемых параметров информация поступает в блок 11 вычисления момента времени пересечения целью линии базы, где на основе зависимостей
и
приближенно определяется экстраполированный момент времени пересечения целью линии базы до пролета целью этой линии.
При нахождении цели на линии базы угловая координата β и частота Доплера fRЭ равны нулю, поэтому искомый момент времени согласно (7), (8) может быть найден из уравнений:


Информация, полученная в блоке 10 экстраполяции измеряемых параметров и блоке 11 вычисления момента времени пересечения целью линии базы, поступает в блок 12 определения поверхности положения, где происходит определение поверхности положения.
Как видно из формул (4) и (5), блок 12 определения поверхности положения производит интегрирование входного напряжения с последующим масштабированием. Если данные измерений доплеровской частоты fR поступают дискретно через равные промежутки времени ΔT, то формулы (4), (5) можно представить в виде
где n-й дискретный момент времени соответствует текущему значению времени t=in, в котором и производится оценка RΣn; m-й дискретный момент времени соответствует моменту времени пересечения целью линии базы tП=im.
Таким образом, основной операцией блока 12 определения поверхности положения в случае дискретных измерений является суммирование входного напряжения.
Связь полученного в блоке определения поверхности положения 12 значения суммарной дальности и прямоугольных координат X и Y, вычисленных в блоке вычисления траекторных параметров 13 с высотой цели Н, вычисленной в блоке 14 определения высоты полета цели, находится по формуле:

На основании формулы (15) в блоке 14 вычисления высоты полета цели определяется значение:

На фиг. 5 и фиг. 6 приведены значения СКО определения высоты полета цели при величине базы L=50 км, цель совершает прямолинейный полет на высоте 5000 м перпендикулярно к линии базы со скоростью 200 м/с с начальными координатами Х=20 км, Y=15 км.
Так, на фиг. 5 СКО определения высоты цели получены при: СКО определения угловых координат σр=0.5 град., СКО определения суммарной дальности σRΣ=10 м, применительно к фиг. 6 СКО определения угловых координат σβ=0.1 град.
Графики иллюстрируют приемлемую для практики точность измерения высоты.
Рассмотрим пример выполнения блоков предлагаемого устройства.
Антенна 2 передающей позиции может быть выполнена как в (см. Справочник по основам радиолокационной техники. Под ред. Дружинина В.В. М.: Военное издательство, 1967. 776 с. стр. 165. рис. 4.48.)
Антенна 3 приемной позиции может быть выполнена как в (см. Бакулев П.А., Радиолокационные системы. - М.: Радиотехника, 2004, 320 с рис. 11.12 стр. 261).
Блок 4 деления опорного напряжения может быть выполнен на основе последовательной или параллельной схемы многоканальных делителей мощности на связанных линиях, например как в (см. Веселов Г.И., Егоров Е.Н., Алехин Ю.Н. и др. Микроэлектронные устройства СВЧ. Под ред. Веселова Г.И., М.: Высшая школа, 1988. - 280 с. рис. 3.28 стр. 75).
Суммирующие устройства 5 могут быть выполнены как в (см. Веселов Г.И., Егоров Е.Н., Алехин Ю.Н. и др. Микроэлектронные устройства СВЧ. Под ред. Веселова Г.И., М.: Высшая школа, 1988. - 280 с. рис. 3.27 стр. 74).
Приемники 6 могут быть выполнены как в (см. Проектирование радиоприемных устройств под. ред. Сиверса А.П. М.: «Сов. радио», 1976 г. стр. 68 рис. 2.25, 485 с.).
Блок 7 определения направления прихода интерференционного сигнала может представлять собой фазометр (см. Теоретические основы радиолокации. Под. ред. Ширмана Я.Д. М.: «Советское радио» 1970, 560 стр. стр. 300 рис. 5.65), при использовании амплитудного моноимпульсного метода блок 7 может быть выполнен на основе схемы сравнения амплитуд или схемы вычитания (Теоретические основы радиолокации. Под. ред. Ширмана Я.Д. М.: «Советское радио» 1970, 560 стр. стр. 297 рис. 5.62).
Блоки 8 измерения доплеровской частоты и блок 9 определения азимутального положения ДНА передающей позиции могут представлять собой, например, низкочастотный измеритель частоты переменного напряжения (частотомер), выполненный по схеме цифрового частотомера либо цифрового периодомера, например как в (см. Тузов Г.И. Выделение и обработка информации в допплеровских системах. М.: Советское радио. - 1967. 255 с. стр. 57 рис. 2.2.а) и б)), либо аналогичных системах.
Блоки 10 экстраполяции измеряемых параметров (зависимостей частоты Доплера и углового направления на цель во времени), блок 11 вычисления момента пересечения целью линии базы, блок 12 определения поверхности положения и блок 13 вычисления траекторных параметров представляют собой устройства, а также блок 14 определения высоты полета цели реализующие вычислительные процедуры и могут быть выполнены как (см. Патент на полезную модель РФ №72339, МПК G06F 15/16, опубл. 10.04.2008).
Блок 15 синхронизации может быть выполнен как в (см. Патент на изобретение РФ №2304788, МПК G01S 7/285, H04L 7/00, опубл. 20.08.2007. Модуль синхронизации).
Синтезатор 16 частот - как в (см. Манассевич В. Синтезаторы частот. Теория и проектирование): Пер. с англ. / Под. ред. А.С. Галина. М.: Связь, 1979. стр. 16 рис. 1.3).
Усилитель 17 мощности может быть выполнен как в (см. Петров Б.Е., Романюк В.А. Радиопередающие устройства на полупроводниковых приборах. Учеб. пособие для радиотехн. спец. вузов. - М.: Высш. Шк. - 1989. - 232 с. рис. В5, стр. 8).
Блок 18 управления лучом, по сути, представляет собой систему управления антенной.
Возможные способы реализации вводимых в устройство новых блоков указаны ранее при описании работы устройства.
Используемые в изобретении блоки могут быть выполнены на основе стандартных, типовых радиотехнических элементов.
Устройство для определения параметров движения цели, содержащее передающую позицию, состоящую из последовательно соединенных передатчика и антенны, и в удаленной от нее точке приемную позицию, которая состоит из антенны приемной позиции, имеющей N выходов, где N - число парциальных взаимно перекрытых по уровню половинной мощности приемных пространственных каналов, каждый из выходов, кроме центрального, соединен с одним из входов соответствующего суммирующего устройства, выход которого соединен со входом соответствующего приемника, а центральный выход антенны соединен со входом блока деления опорного напряжения, имеющего N выходов, соответствующий выход которого соединен непосредственно с входом приемника центрального парциального канала, а остальные N-1 выходов соединены со вторыми входами суммирующих устройств соответствующих парциальных каналов, блока определения азимутального положения диаграммы направленности антенны передающей позиции, вход которого подключен ко второму выходу приемника центрального парциального канала, а выход подключен ко второму входу блока вычисления траекторных параметров, при этом передатчик передающей позиции содержит последовательно соединенные блок синхронизации, синтезатор частоты, усилитель мощности и блок управления лучом, второй вход которого соединен со вторым выходом блока синхронизации, а выход соединен с входом передающей антенны, при этом выходы приемника каждого из парциальных каналов раздельно соединены с соответствующими входами блока измерения направления прихода интерференционного сигнала, выход которого соединен с первым входом блока вычисления траекторных параметров, отличающееся тем, что введены последовательно соединенные блок измерения доплеровской частоты, блок экстраполяции измеряемых параметров (зависимостей частоты Доплера и углового направления на цель во времени), блок вычисления момента пересечения целью линии базы и блок определения поверхности положения, выход которого соединен с третьим входом блока вычисления траекторных параметров, а также блок расчета высоты полета цели, причем соответствующий вход блока измерения доплеровской частоты соединены с выходом соответствующего приемника, второй вход блока экстраполяции измеряемых параметров подключен к выходу блока измерения направления прихода интерференционного сигнала и к первому входу блока расчета высоты полета цели, связанному также с первым выходом блока вычисления траекторных параметров, второй вход блока определения поверхности положения соединен с выходом блока экстраполяции измеряемых параметров, второй вход блока расчета высоты полета цели соединен с выходом блока определения азимутального положения диаграммы направленности антенны передающей позиции, третий вход блока расчета высоты полета цели соединен с выходом блока вычисления траекторных параметров, а выход блока расчета высоты полета цели является выходом всего устройства.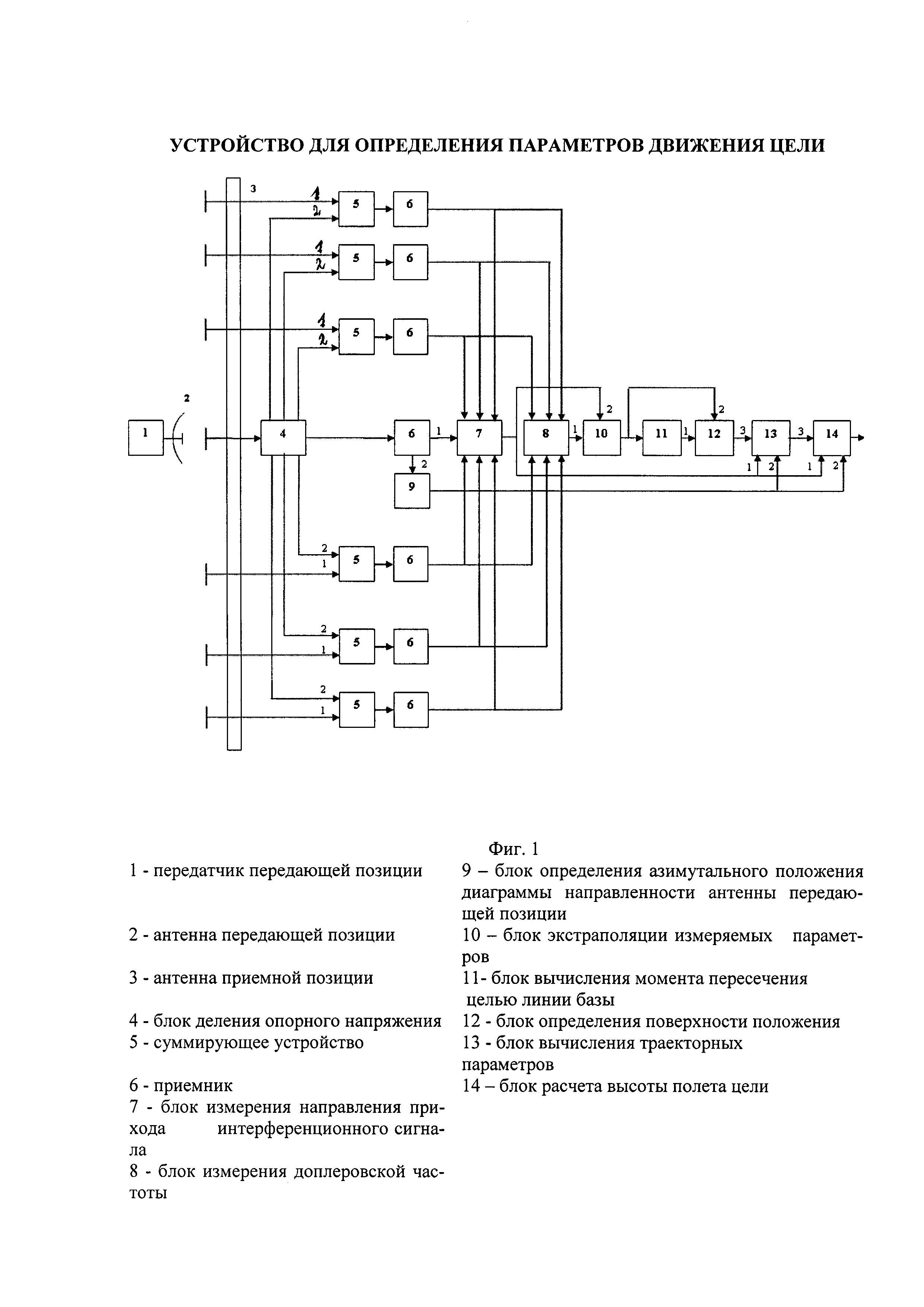
Всенаправленная антенна излучения
Устройство акустического представления пространственной информации для пользователей
Устройство для определения параметров движения цели
Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе
Адаптивное устройство разделения неортогональных цифровых сигналов двоичной фазовой манипуляции
Устройство для образования скважин в грунте ударным способом
Способ измерения установившегося после включения питания значения постоянного электрического сигнала на выходе измерительного преобразователя
Способ акустического представления пространственной информации для пользователей
Устройство для определения параметров движения объекта
Способ формирования заверенного цифровым водяным знаком цветного электронного изображения
Всенаправленная антенна излучения
Устройство акустического представления пространственной информации для пользователей
Устройство для определения параметров движения цели
Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе
Адаптивное устройство разделения неортогональных цифровых сигналов двоичной фазовой манипуляции
Устройство для образования скважин в грунте ударным способом
Способ измерения установившегося после включения питания значения постоянного электрического сигнала на выходе измерительного преобразователя
Способ акустического представления пространственной информации для пользователей
Устройство для определения параметров движения объекта
Способ формирования заверенного цифровым водяным знаком цветного электронного изображения

