Результат интеллектуальной деятельности: ПРИВОД С ОБЛЕГЧЕННОЙ УСТАНОВКОЙ
Вид РИД
Изобретение
Изобретение относится к области авиации и, в частности, к приводам подвижных рулевых поверхностей летательного аппарата, таких как элероны, рули направления, закрылки, предкрылки, рули высоты.
Подвижные рулевые поверхности шарнирно соединены с конструкцией летательного аппарата с возможностью перемещения между двумя крайними положениями и перемещаются между этими двумя положениями при помощи приводных органов, содержащих входную шестерню, связанную с линией передачи, соединяющей приводные органы между собой и с общим двигателем, управляемым блоком управления летательного аппарата. Линия передачи содержит валы, соединяемые друг с другом через шлицевые участки. Это решение является относительно сложным, в частности, так как необходимо регулировать взаимное угловое положение валов для обеспечения синхронизации приводных органов, действующих на одну и ту же подвижную рулевую поверхность. Однако приводная система выполнена таким образом, что для перемещения подвижных рулевых поверхностей между их крайними положениями необходимо, чтобы валы совершали более одного оборота: следовательно, одному и тому же угловому положению валов могут соответствовать несколько положений подвижных рулевых поверхностей. Это намного усложняет первоначальный монтаж и последующие операции обслуживания приводной системы.
Было также предложено соединить по меньшей мере один привод с каждой подвижной рулевой поверхностью и связать все приводы с блоком управления. Под приводом следует понимать двигатель, имеющий статор, закрепленный на конструкции летательного аппарата, и ротор, связанный через линию передачи движения с приводным органом, соединенным с подвижной рулевой поверхностью, чтобы действовать на нее усилием, обеспечивающим ее перемещение. Это приводит к существенному увеличению массы всей приводной системы.
Кроме того, учитывая размер подвижных рулевых поверхностей и действующие на них напряжения, как правило, предусматривают по меньшей мере два привода на одну подвижную рулевую поверхность, что приводит к соответствующему увеличению массы всей приводной системы, и в данном случае тоже необходимо регулировать взаимное угловое положение приводов, действующих на одну и ту же подвижную рулевую поверхность.
Задачей изобретения является упрощение системы приводов подвижных рулевых поверхностей летательного аппарата.
Для этого изобретением предложен привод для подвижной рулевой поверхности, содержащий по меньшей мере два приводных органа для перемещения подвижной рулевой поверхности между двумя крайними положениями и двигатель, связанный с приводными органами по меньшей мере через одну линию передачи вращательного движения. Каждый приводной орган содержит шестерню, причем привод расположен так, чтобы линия передачи имела угловую амплитуду по меньшей мере в один оборот во время перемещения подвижной рулевой поверхности между ее двумя положениями, при этом линия передачи движения выполнена с возможностью допускать единственное угловое положение между шестернями приводных органов.
Таким образом, угловая амплитуда по меньшей мере в один оборот и выполнение линии передачи с возможностью допускать только одно угловое положение между входными шестернями облегчают установку и обслуживание привода.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания частных и не ограничительных вариантов осуществления изобретения.
Это описание представлено со ссылками на прилагаемые чертежи, на которых:
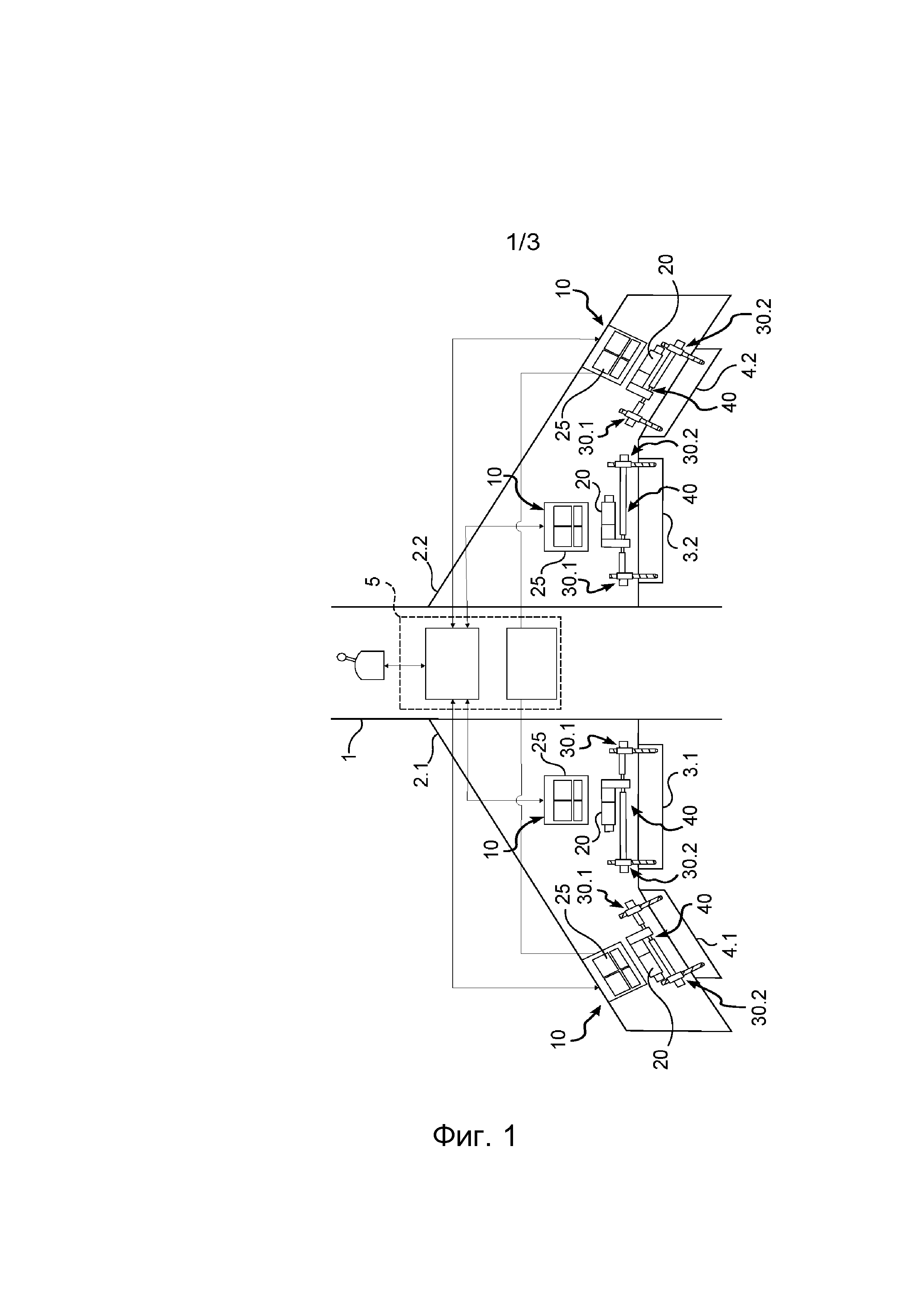
на фиг. 1 схематично показана часть летательного аппарата в соответствии с изобретением, вид сверху;
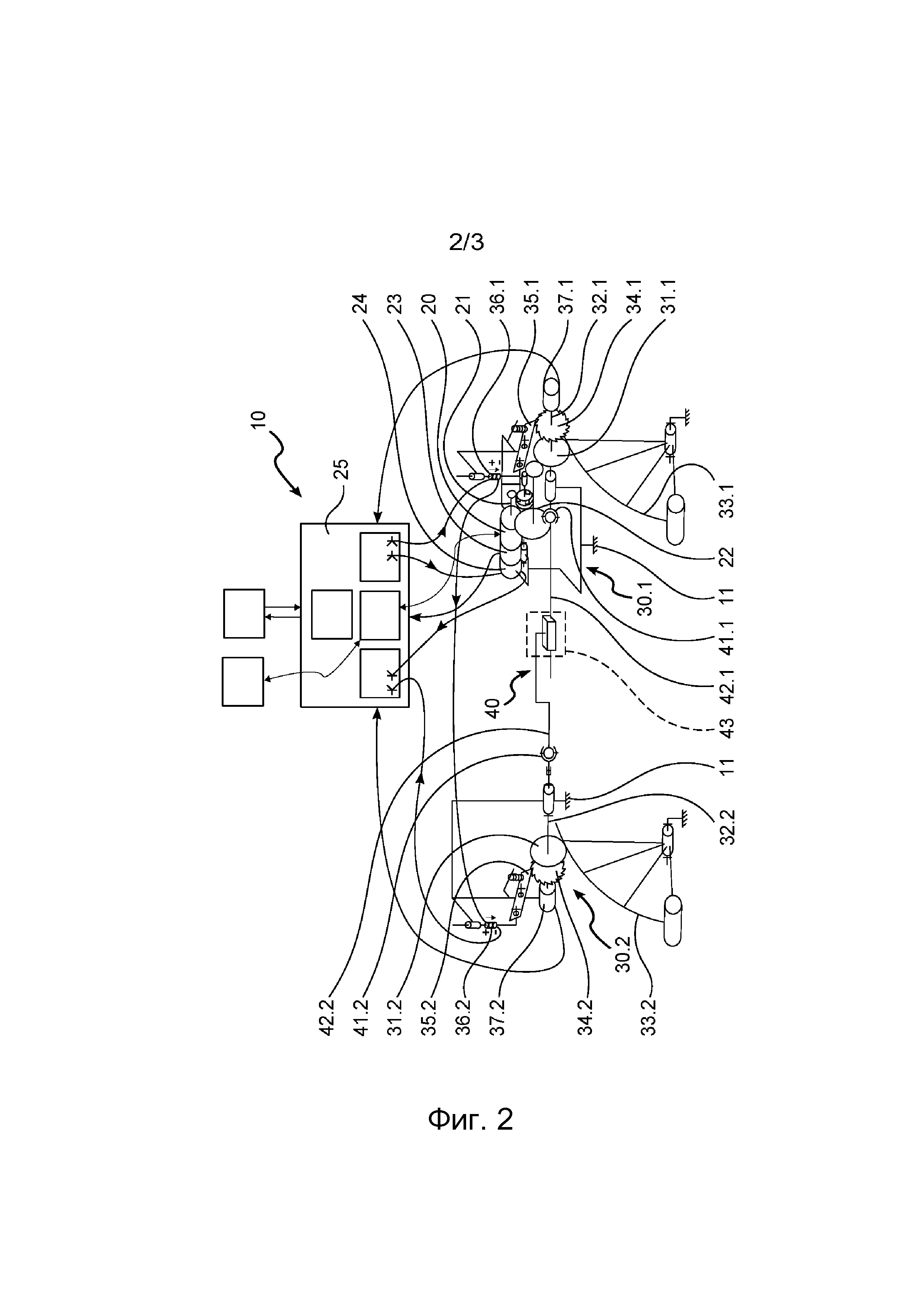
на фиг. 2 представлена кинематическая схема одного из приводов этого летательного аппарата согласно первому варианту осуществления изобретения;
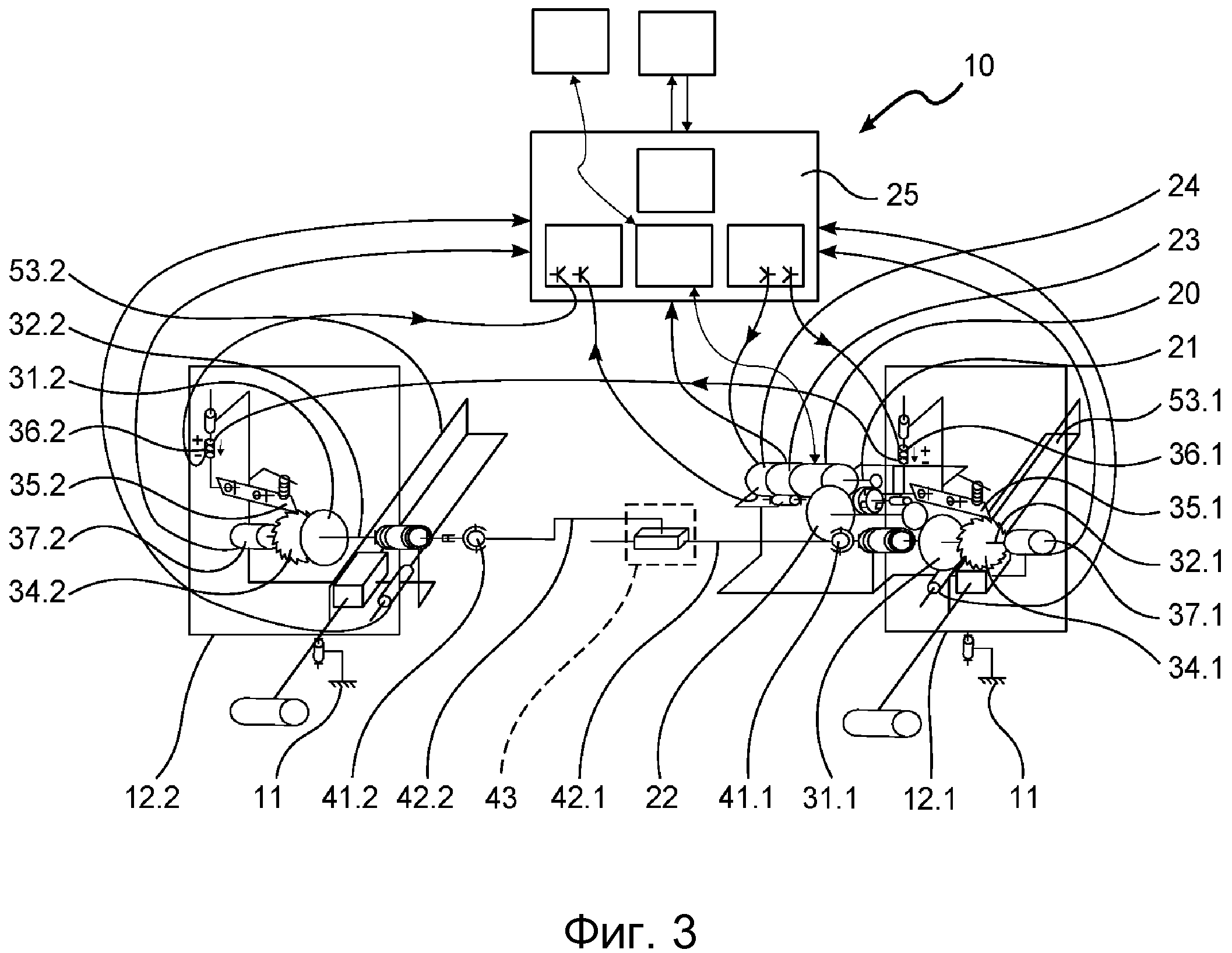
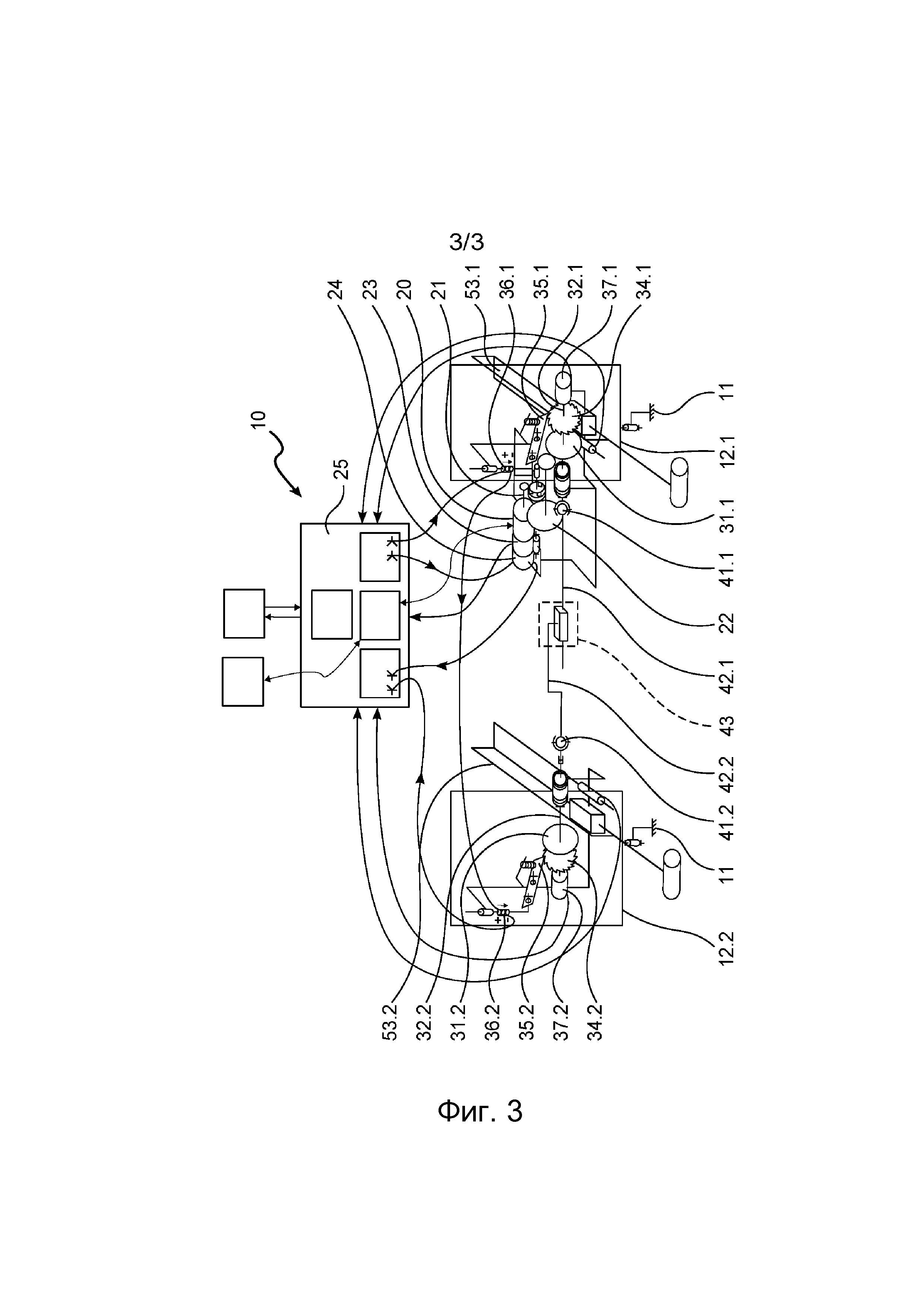
на фиг. 3 представлена кинематическая схема одного из приводов этого летательного аппарата согласно второму варианту осуществления изобретения.
Представленное на фигурах изобретение описано в связи с применением для летательного аппарата, содержащего фюзеляж 1 и два крыла 2.1, 2.2, каждое из которых оснащено внутренним закрылком 3.1, 3.2 и наружным закрылком 4.1, 4.2. Как известно, закрылки 3.1, 3.2, 4.1, 4.2 установлены на крыльях 2.1, 2.2 с возможностью поворота между двумя крайними положениями и перемещаются между своими двумя положениями приводной системой, управляемой блоком 5 управления летательного аппарата. Блок 5 управления представляет собой совокупность вычислительных устройств, которые связаны с инструментами управления из кабины экипажа и с датчиками, распределенными в летательном аппарате, и которые управляют двигателями и подвижными рулевыми поверхностями в зависимости от действий, производимых пилотом на инструменты управления.
В данном случае приводная система содержит по одному приводу на каждый закрылок 3.1, 3.2, 4.1, 4.2.
Каждый привод, имеющий общее обозначение 10, содержит опору 11, на которой установлен единственный двигатель 20, приводящий в движение по меньшей мере два приводных органа 30.1, 30.2, перемещающие закрылок 3.1, 3.2, 4.1, 4.2 между его двумя крайними положениями.
Двигатель 20 является электрическим вращающимся двигателем, имеющим вращающуюся часть, которая взаимодействует с:
- решающим устройством 23, выполненным с возможностью отслеживать угловое положение указанной вращающейся части относительно заранее определенного контрольного положения,
- тормозом 24, выполненным с возможностью блокировать вращение указанной вращающейся части.
Решающее устройство 23 и тормоз 24 соединены с модулем 25 управления, связанным с блоком 5 управления, который им управляет. Модуль 25 управления содержит электронную схему управления и силовую электронную схему, которые сами по себе известны, при этом силовой электронной схемой управляет электронная схема управления, связанная с блоком 5 управления.
Вращающаяся часть двигателя 20 содержит выходной вал 21, соединенный через зубчатую передачу 22, образующую редуктор, с шестерней 31.1 приводного органа 30.1. Шестерня 31.1 неподвижно соединена с валом 32.1, установленным с возможностью поворота на опоре 11, и зацепляется с зубчатым сектором 33.1, установленным с возможностью поворота на опоре 11, будучи при этом неподвижно соединенным с закрылком 3.1, 3.2, 4.1, 4.2 таким образом, что, когда зубчатый сектор 33.1 приводится во вращение, он заставляет поворачиваться одновременно закрылок 3.1, 3.2, 4.1, 4.2. На валу 32.1 установлено также храповое колесо 34.1, которое взаимодействует с собачкой 35.1, управляемой соленоидом 36.1 для перемещения между свободным положением, в котором собачка 35.1 отходит от храпового колеса 34.1, позволяя валу 32.1 свободно вращаться в двух направлениях вращения, и положением зацепления собачки 35.1 с храповым колесом 36.1, в котором вал 32.1 может вращаться только в одном направлении. Соленоид 36.1 соединен с модулем 25 управления, который им управляет. Приводной орган 30.1 содержит решающее устройство 37.1, установленное на опоре 11 для отслеживания углового положения вала 32.1 и соединенное с модулем 25 управления, чтобы выдавать ему это угловое положение.
Приводной орган 30.2 тоже содержит шестерню 31.2, которая неподвижно соединена с валом 32.2, установленным с возможностью поворота на опоре 11, и зацепляется с зубчатым сектором 33.2, установленным с возможностью поворота на опоре 11, будучи при этом неподвижно соединенным с закрылком 3.1, 3.2, 4.1, 4.2 таким образом, что, когда зубчатый сектор 33.2 приводится во вращение, он заставляет поворачиваться одновременно закрылок 3.1, 3.2, 4.1, 4.2. На валу 32.2 тоже установлено храповое колесо 34.2, которое взаимодействует с собачкой 35.2, управляемой соленоидом 36.2 для перемещения между свободным положением, в котором собачка 35.2 отходит от храпового колеса 34.2, позволяя валу 32.2 свободно вращаться в двух направлениях вращения, и положением зацепления собачки 35.2 с храповым колесом 36.2, в котором вал 32.2 может вращаться только в одном направлении. Соленоид 36.2 соединен с модулем 25 управления, который им управляет. Приводной орган 30.2 содержит решающее устройство 37.2, установленное на опоре 11 для отслеживания углового положения вала 32.2 и соединенное с модулем 25 управления, чтобы выдавать ему это угловое положение.
Один конец вала 32.1 связан во вращении через карданный шарнир 41.1 с концом вала 42.1 линии 40 передачи движения. Один конец вала 32.2 связан во вращении через карданный шарнир 41.2 с концом вала 42.2 линии 40 передачи движения. Вал 42.1 имеет противоположный конец, разъемно соединенный через муфту 43 с концом вала 42.2, противоположным карданному шарниру 41.2. Муфта 43 обеспечивает фиксированное соединение во вращении между валами 42.1, 42.2. Под фиксированным соединением во вращении следует понимать соединение, которое при монтаже допускает только одно относительное угловое положение валов 42.1, 42.2. Кроме того, в данном случае соединение является разъемным скользящим соединением, которое позволяет, с одной стороны, избегать появления напряжений, возникающих при деформациях крыла и, с другой стороны, обеспечивает легкое соединение и разъединение валов 42.1, 42.2. Такое соединение выполняют, например, в виде шпоночного соединения. Таким образом, линия 40 передачи движения выполнена с возможностью обеспечивать единственное угловое положение между шестерными 31.1 и 31.2.
Привод расположен таким образом, чтобы линия 40 передачи имела угловую амплитуду по меньшей мере в один оборот во время перемещения закрылка 3.1, 3.2, 4.1, 4.2 между его двумя крайними положениями. Этого добиваются за счет передаточных отношений зубчатой передачи 22 между выходной шестерней зубчатой передачи 22 и шестерней 31.1 и между шестерней 31.1, 31.2 и зубчатым сектором 33.1, 33.2.
Понятно, что такое расположение облегчает соединение между приводными органами 30.1, 30.2 каждого привода 10, так как существует только одно относительное угловое положение между валами 32.1, 32.2.
Предпочтительно предусмотрен орган ограничения инерции в зубчатой передаче 22, чтобы кинетическая энергия, накапливаемая в двигателе, не могла привести к разрушению конструкции летательного аппарата в случае блокировки линии передачи. Этот орган представляет собой, например, ограничитель крутящего момента, такой как фрикционный ограничитель, установленный в линии передачи вблизи двигателя.
Блок 5 управления выполнен с возможностью независимого управления закрылками.
Изобретение обеспечивает механическую синхронизацию между приводными органами 30.1, 30.2 одного и того же закрылка при помощи линии 40 передачи и электрическую синхронизацию через блок 5 управления между приводами 10 одного крыла или обоих крыльев при помощи решающих устройств 37.1 и 37.2, которые задают угловое положение каждого привода.
В нижеследующем описании второго варианта выполнения со ссылками на соответствующую фиг. 3 элементы, идентичные или подобные описанным выше элементам, имеют такие же цифровые обозначения.
Вариант выполнения, представленный на фиг. 3, идентичен варианту, показанному на фиг. 2, за исключением того, что шестерня 31.1, 31.2 каждого приводного органа 30.1, 30.2 зацепляется с зубчатой рейкой 53.1, 53.2, а не с зубчатым сектором 33.1, 33.2. Зубчатая рейка 53.1, 53.2 установлена с возможностью перемещения скольжением в направлении, перпендикулярном к оси поворота закрылка 3.1, 3.2, 4.1, 4.2, и один ее конец шарнирно связан с рычагом, неподвижно соединенным с указанным закрылком. Кроме того, каждая зубчатая рейка 53.1, 53.2 связана с датчиком положения, в данном случае с датчиком типа LVDT.
Кроме того, каждый приводной орган 30.1, 30.2 в данном случае установлен на промежуточной опоре 12.1, 12.2, установленной на опоре 11, с возможностью поворачиваться вокруг оси, перпендикулярной к направлению перемещения зубчатой рейки 53.1, 53.2, таким образом, чтобы образовать карданный вал, обеспечивающий свободную ориентацию зубчатых реек 53.1, 53.2, когда они действуют усилием на закрылки.
В остальном работа привода 10 согласно второму варианту осуществления идентична работе привода согласно первому варианту осуществления.
Разумеется, изобретение не ограничивается описанными вариантами осуществления и охватывает любую версию, не выходящую за рамки изобретения, определенные в формуле изобретения.
В частности, изобретение можно применять для приведения в движение любой подвижной рулевой поверхности, например, элеронов, рулей направления, закрылков, предкрылков, рулей высоты.
Вычислительные устройства блока 5 управления могут быть централизованными или могут быть распределены между центральном блоком, находящимся рядом кабиной экипажа летательного аппарата, чтобы централизовать обработку команд управления, исходящих из кабины экипажа, и специальными блоками, связанными с центральным блоком и расположенными как можно ближе к приводам 10, чтобы управлять ими в зависимости от команд, выдаваемых центральным блоком на основании команд управления.
Зубчатые рейки могут быть заменены шариковыми винтами.
Муфта 43 может быть выполнена при помощи шплинтового соединения, несимметричного шлицевого соединения вокруг оси вращения валов 42.1, 42.2 или другого соединения.
Линия 40 передачи может быть соединена с шестернями 31.1, 31.2, не проходя через карданные шарниры.
Шестерня 31.1, 31.2 может не зацепляться с зубчатым сектором или зубчатой рейкой, и для этого на валу 32.1, 32.2 может быть установлена другая шестерня.
Собачки являются факультативными или могут быть установлены по-другому. Например, собачки могут действовать на зубчатый сектор или на зубчатую рейку. Собачки могут быть заменены на стопора.
Решающие устройства могут быть заменены любым типом датчика углового положения.
Способ навигации беспилотного аппарата в присутствии постороннего летательного аппарата и беспилотный аппарат для осуществления способа
Способ обеспечения автоматической посадки летательного аппарата
Двухканальная архитектура с избыточными линиями связи ccdl
Способ контроля электромеханической приводной системы
Вооруженная оптоэлектронная турель
Устройство управления полетом летательного аппарата
Система для дистанционно управляемых систем
Способ проверки неразрывности передачи данных между главным входным блоком и главным выходным блоком
Устройство ручки управления полетом летательного аппарата с возвратным усилием, содержащее резервный канал
Двухканальная архитектура

