Результат интеллектуальной деятельности: СПОСОБ НАВИГАЦИИ БЕСПИЛОТНОГО АППАРАТА В ПРИСУТСТВИИ ПОСТОРОННЕГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА
Вид РИД
Изобретение
Настоящее изобретение относится к предотвращению столкновений между летательными аппаратами и, в частности, к способу навигации беспилотных аппаратов.
Объектом изобретения является также беспилотный аппарат для осуществления такого способа навигации.
Уровень техники
Беспилотный аппарат является летательным аппаратом без пилота на борту. Этот летательный аппарат может быть оснащен автоматическими системами и может осуществлять свой полет автономно; он может быть также оснащен датчиками, соединенными с устройством автоматического пилотирования и/или с устройством дистанционного управления, которое использует пилот на земле. Беспилотные аппараты все чаще применяют в военной области, в частности, для наблюдения за полем боя, для разведки и даже для атаки на наземные цели.
Было предложено использовать беспилотные аппараты в гражданской области, в частности, для осуществления операций воздушного наблюдения за территориями. Действительно, эти беспилотные аппараты представляют интерес, так как обладают большой автономией полета. С другой стороны, они страдают низкой маневренностью. Отсутствие пилота на борту не позволяет беспилотному аппарату соблюдать действующие правила полетов в гражданском воздушном пространстве, которые предусматривают, в частности, чтобы летательный аппарат мог обеспечивать функцию «видеть и избегать», позволяющую ему предотвращать столкновения. Поэтому беспилотным аппаратам не разрешается летать в воздушном пространстве, специально не выделенном для этой цели, то есть в тех же местах и в то же время, что и гражданские летательные аппараты с пилотом на борту.
Как известно, на летательных аппаратах установлены транспондеры (работающие в режиме А, С или S для гражданских летательных аппаратов), позволяющие, в частности, вспомогательным радиолокационным станциям воздушного контроля определять положение этих летательных аппаратов и идентифицировать их в контролируемом пространстве. Для этого вспомогательные радиолокационные станции запрашивают транспондеры летательных аппаратов, пролетающих в контролируемой зоне пространства, и транспондеры передают в ответ сигнал, содержащий идентификатор, а также высоту полета, в зависимости от режима работы транспондера.
Существует система предупреждения столкновений, предназначенная для оснащения некоторых управляемых летательных аппаратов, которая известна под названием NCAS и соответствует стандарту ACAS, определенному в Конвенции о международной гражданской авиации. В Европе использование этой системы получает все большее распространение, и все пассажирские самолеты вместимостью более восемнадцати мест должны быть обязательно оснащены версией II этой системы, включающей в себя транспондер режима S. Система выполнена с возможностью сбора данных о курсе и положении любого летательного аппарата, называемого посторонним летательным аппаратом, пролетающем в пространстве, окружающем рассматриваемый летательный аппарат в радиусе от 2,5 миль (4 км) до 30 миль (48 км). Эти данные включают в себя в основном расстояние до этих летательных аппаратов, их высоту полета и приблизительные данные азимута. Данные получают путем запроса транспондера режима S постороннего летательного аппарата и используют для системы TCAS II, чтобы определить возможно ли столкновение с этим посторонним летательным аппаратом. В случае риска столкновения, обнаруживаемого системой TCAS, происходит оповещение пилота каждого летательного аппарата при помощи звукового сигнала в кабине экипажа. Если после этого тревожного сигнала риск не уменьшился и столкновение кажется неизбежным, система TCAS определяет команду маневра для пилота: сохранять текущую траекторию, произвести набор высоты, снижение или контроль вертикальной скорости.
Однако использование системы TCAS является сложным и не подходит для беспилотных аппаратов, которые, как правило, имеют относительно низкую стоимость.
Задача изобретения
Задачей изобретения является облегчение навигации беспилотного аппарата и повышение его безопасности за счет обеспечения учета присутствия по меньшей мере одного постороннего летательного аппарата в пространстве, окружающем беспилотный аппарат.
Сущность изобретения
Для этого изобретением предложен способ навигации беспилотного аппарата в присутствии по меньшей мере одного постороннего летательного аппарата в зоне пространства, окружающего беспилотный аппарат. Этот способ содержит этапы, осуществляемые на уровне беспилотного аппарата, на которых:
- принимают сигнал от постороннего летательного аппарата и вычисляют оценочное расстояние между беспилотным аппаратом и посторонним летательным аппаратом на основании мощности принимаемого сигнала;
- снимают по меньшей мере одно изображение постороннего летательного аппарата и на основании этого изображения определяют пеленг постороннего летательного аппарата;
- из сигнала выделяют высоту полета, переданную посторонним летательным аппаратом;
- используя оценочное расстояние, вычисляют оценочное значение данных позиционирования постороннего летательного аппарата или беспилотного аппарата;
- оценочное значение данных позиционирования сравнивают с измеренным значением данных позиционирования и вычисленное расстояние принимают в расчет для навигации, если оценочное значение по существу соответствует измеренному значению.
Данными позиционирования может быть высота полета постороннего летательного аппарата (при этом измеренное значение является переданной высотой полета) или пеленг постороннего летательного аппарата относительно беспилотного аппарата (при этом измеренное значение пеленга является значением, определенным на изображении). Таким образом, поскольку при вычислении оценочного значения данных позиционирования используют оценочное расстояние, то сравнение оценочного значения и измеренного значения позволяет проверить достоверность оценочного расстояния между беспилотным аппаратом и посторонним летательным аппаратом. Это позволяет ограничить риск ошибки. Оценочное и подтвержденное расстояние можно учитывать для навигации, в частности, чтобы предусмотреть маневр уклонения от постороннего летательного аппарата или чтобы среди имеющихся данных идентифицировать наиболее надежные данные для использования в целях навигации. Не обязательно оборудовать беспилотный аппарат запросчиком транспондера, поскольку приемник беспилотного аппарата принимает, например, сигналы, передаваемые транспондером режима С или S постороннего летательного аппарата, после того как его запросит либо вспомогательная радиолокационная станция, либо другой летательный аппарат, оборудованный запросчиком; приемник беспилотного аппарата может также принимать, например, сигналы, автоматически передаваемые устройством типа ADS-B (от английского "Automatic Dependent Surveillance-Broadcast"). Таким образом, заявленный способ можно осуществлять при помощи только пассивных датчиков, в частности, если беспилотный аппарат должен летать только в окружающей среде в радиусе охвата вспомогательных радиолокационных станций.
Объектом изобретения является также беспилотный аппарат, содержащий устройство пилотирования, соединенное с инструментом измерения высоты полета, с оптоэлектронным устройством обнаружения, выполненным с возможностью определения пеленга постороннего летательного аппарата, летящего в зоне, окружающей беспилотный аппарат, и с приемником для приема сигнала, который передается посторонним летательным аппаратом и который содержит высоту полета постороннего летательного аппарата. Устройство пилотирования беспилотного аппарата выполнено с возможностью:
- вычисления оценочного расстояния между беспилотным аппаратом и посторонним летательным аппаратом на основании мощности сигнала, принимаемого приемником;
- съемки по меньшей мере одного изображения постороннего летательного аппарата при помощи оптоэлектронного устройства и определения пеленга постороннего летательного аппарата на основании этого изображения;
- выделения из указанного сигнала высоты полета, переданной посторонним летательным аппаратом;
- вычисления оценочной высоты полета постороннего летательного аппарата на основании пеленга и вычисленного расстояния;
- сравнения оценочной высоты полета с переданной высотой и учета вычисленного расстояния для навигации, если оценочная высота полета по существу соответствует переданной высоте.
Другие признаки и преимущества изобретения будут более очевидны из нижеследующего описания частных и не ограничительных вариантов осуществления изобретения.
Это описание представлено со ссылками на прилагаемые чертежи, на которых:
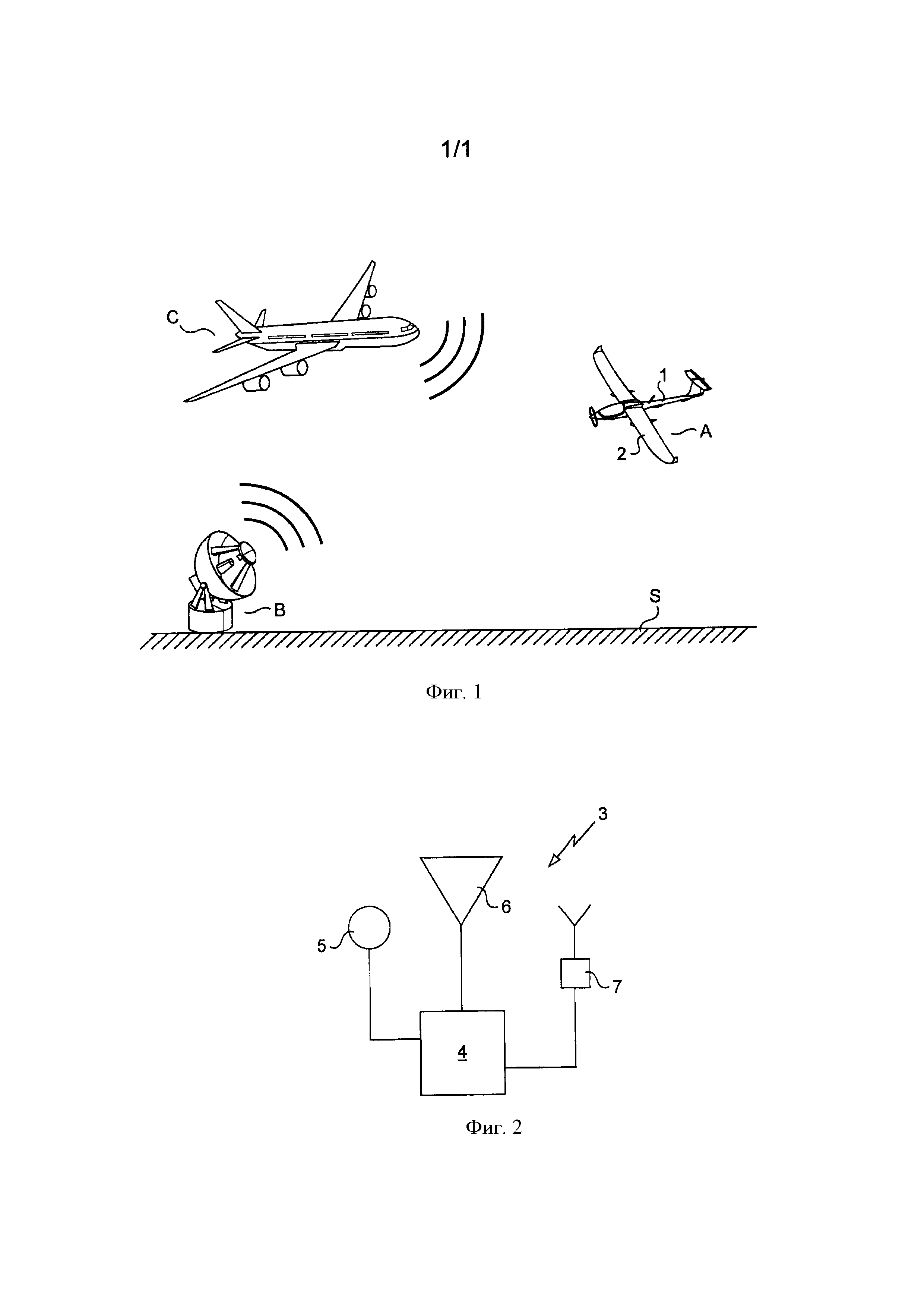
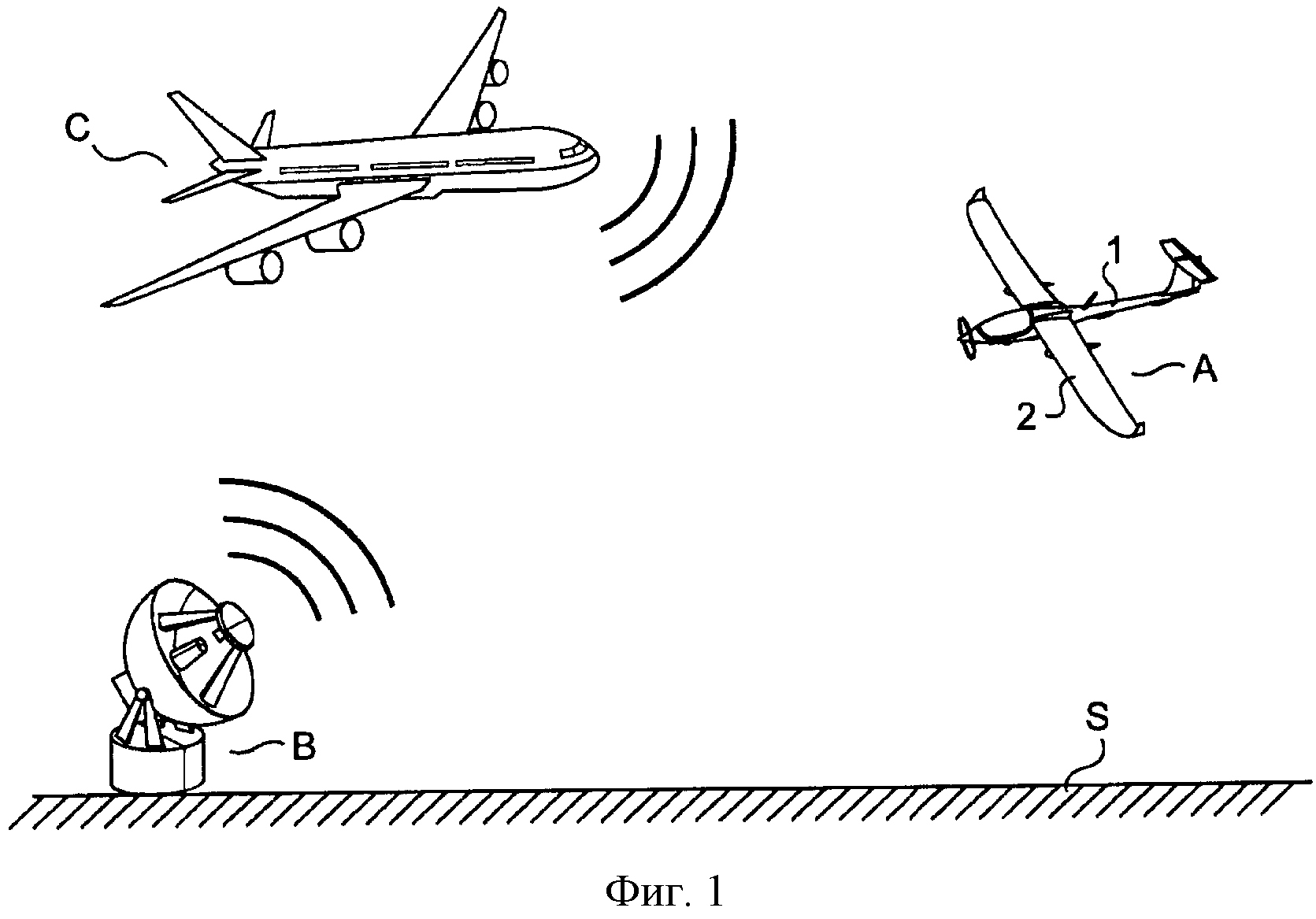
Фиг. 1 - схематичный вид в перспективе ситуации пересечения курсов летательного аппарата и заявленного беспилотного аппарата.
Фиг. 2 - схема устройства пилотирования заявленного беспилотного аппарата.
Как показано на фигурах, заявленный беспилотный аппарат имеет общую форму самолета и содержит фюзеляж 1 и крылья 2, которые оснащены несущими поверхностями, перемещаемыми при помощи приводов, соединенных с устройством пилотирования, установленным в беспилотном аппарате. Сама конструкция беспилотного аппарата не является объектом изобретения, поэтому ее подробное описание опускается.
Устройство пилотирования, обозначенное общей позицией 3, содержит блок 4 обработки данных, соединенный с инструментом 5 измерения высоты, с оптоэлектронным устройством 6 обнаружения и с приемником 7. Как известно, устройство 3 пилотирования содержит также средства управления приводами несущих поверхностей и двигателем беспилотного аппарата.
Блок 4 обработки данных является компьютерным блоком, который содержит, в частности, процессор для обработки данных и запоминающее устройство для записи данных.
Инструмент 5 измерения высоты является классическим барометрическим инструментом.
Оптоэлектронное устройство 6 обнаружения содержит датчик изображения, связанный со съемочным блоком и ориентированный таким образом, чтобы его поле охватывало контролируемую зону пространства, находящуюся спереди беспилотного аппарата. Датчик устройства 6 обнаружения выполнен с возможностью работать в инфракрасной области и/или в видимой области спектра. Датчик обладает достаточными характеристиками, чтобы обеспечивать обнаружение в получаемых изображениях летательного аппарата (называемого посторонним летательным аппаратом), находящегося в контролируемой зоне пространства на максимальном расстоянии от 8 до 10 км. Блок 4 обработки включает в себя модуль (программный или аппаратный) обработки изображения, выполненный с возможностью определения пеленга постороннего летательного аппарата, летящего в контролируемой зоне пространства.
Приемник 7 имеет направленную антенну и выполнен с возможностью приема сигнала, передаваемого транспондерами режима S летательных аппаратов, летящих недалеко от беспилотного аппарата. В данном случае приемник работает на частоте 1090 МГц. Сигнал содержит барометрическую высоту постороннего летательного аппарата, код транспондера и шестнадцатеричный код идентификатора каждого летательного аппарата, оснащенного транспондером режима S.
Устройство 3 пилотирования выполнено и запрограммировано с возможностью:
- вычисления оценочного расстояния между беспилотным аппаратом и посторонним летательным аппаратом на основании мощности сигнала, принимаемого приемником 7;
- съемки по меньшей мере одного изображения постороннего летательного аппарата при помощи оптоэлектронного устройства и определения пеленга постороннего летательного аппарата на основании этого изображения;
- выделения из сигнала высоты полета, переданной посторонним летательным аппаратом;
- вычисления оценочной высоты полета постороннего летательного аппарата на основании пеленга и вычисленного расстояния;
- сравнения оценочной высоты полета с переданной высотой и учета вычисленного расстояния для навигации, если оценочная высота полета по существу соответствует переданной высоте.
Блок 4 обработки запрограммирован для применения фильтров Калмана, в частности, для вычисления:
- высоты и вертикальной скорости постороннего летательного аппарата на основании переданной высоты, содержащейся в принятых сигналах;
- оценочного расстояния и относительной скорости (или скорости сближения) между беспилотным аппаратом и посторонним летательным аппаратом на основании мощности каждого принятого сигнала;
- оценочной высоты и оценочной вертикальной скорости на основании пеленга и оценочного расстояния.
Блок 4 обработки дополнительно содержит модуль (программный или аппаратный) сопоставления данных, выделяемых только из принятого сигнала (переданная высота, оценочное расстояние, оценочная скорость сближения, вертикальная скорость), и данных, выделяемых также из изображений (оценочная вертикальная скорость, оценочная высота).
Далее с целью детального изложения заявленного способа следует описание ситуации потенциального столкновения между заявленным беспилотным аппаратом и посторонним летательным аппаратом.
Когда беспилотный аппарат А находится в полете, оптоэлектронное устройство 6 передает изображения в блок 4 обработки, который обрабатывает эти изображения для выявления в них присутствия постороннего летательного аппарата. Как только модуль обработки изображения обнаруживает посторонний летательный аппарат С в одном из изображений, переданных оптоэлектронным устройством 6, модуль обработки изображения определяет на основании изображения пеленг постороннего летательного аппарата С, присутствующего на изображении.
Совершающий полет беспилотный аппарат А параллельно принимает сигналы от транспондеров летательных аппаратов, отвечающих вспомогательной радиолокационной станции В, которая находится на земле S и наблюдает за зоной контроля, в которой летят указанные летательные аппараты и беспилотный аппарат А. Блок 4 обработки данных беспилотного аппарата выделяет содержащуюся в сигнале переданную высоту, идентификатор летательного аппарата, передавшего сигнал, и определяет мощность принятого сигнала.
Оценочное расстояние между беспилотным аппаратом и посторонним летательным аппаратом вычисляют при помощи фильтра Калмана на основании мощности принятого сигнала и передают в модуль сопоставления.
Блок 4 обработки данных использует также оценочное расстояние для вычисления оценочной высоты постороннего летательного аппарата на основании оценочного расстояния и пеленга.
Разумеется, что вычисление оценочного расстояния является достоверным, только если прием сигнала и съемка изображения являются близкими друг от друга по времени. Таким образом, можно предусмотреть, чтобы блок 3 пилотирования мог управлять оптоэлектронным устройством 6 таким образом, чтобы прием сигнала автоматически запускал съемку изображения оптоэлектронным устройством 6.
Оценочную высоту вычисляют в локальной наземной системе координат (например, в системе координат NED или ENU). В данном случае точность оценочной высоты тоже зависит от близости во времени сигнала и съемки изображения.
Мощность принимаемого сигнала используют в данном случае в виде отношения сигнала к шуму принятого сигнала. Это отношение зависит от расстояния между транспондером и приемником, от мощности передачи (мощность транспондера от 1 до 5 ватт включительно), от коэффициента усиления передающей антенны (антенна транспондера постороннего летательного аппарата С), от коэффициента усиления антенны приемника 7 и от атмосферного затухания. Вместе с тем, экспериментально удалось установить, что расстояние можно аппроксимировать при помощи правила второй степени отношения сигнала к шуму. Выбранное правило действует в рассматриваемом диапазоне расстояния, в данном случае от 1 до 10 км.
Если удалось осуществить сопоставление с переданным идентификатором, то данные, которые будут извлечены из изображений постороннего летательного аппарата С или из сигналов, которые будут в дальнейшем переданы посторонним летательным аппаратом С, будут сопоставляться с указанным идентификатором.
На основании данных, получаемых из двух последовательных сигналов, фильтры Калмана блока 4 обработки данных могут вычислить, используя оценочные расстояния, скорость сближения постороннего летательного аппарата С и беспилотного аппарата А и оценочное время до столкновения между посторонним летательным аппаратом С и беспилотным аппаратом А.
Фильтры Калмана выполнены с возможностью отслеживания изменения данных во времени, обнаружения ошибок, сглаживания результатов.
Значения переданных высот, оценочных расстояний, оценочных скоростей сближения (вычисленных по разности оценочных расстояний за данное время), вертикальных скоростей (вычисленных по разности значений переданной высоты за данное время), оценочной высоты (вычисленных на основании оценочных расстояний и пеленгов) и оценочных скоростей набора высоты поступают в блок 4 обработки, который выполнен с возможностью сопоставления этих данных с кодом идентификации данных, таким как идентификатор постороннего летательного аппарата (переданный в принятом сигнале).
Таким образом, модуль сопоставления выполнен с возможностью сравнения высот, то есть:
- прямого сравнения высот (переданной высоты и оценочной высоты постороннего летательного аппарата); и/или
- сравнения вертикальных скоростей (полученных по разности последовательно переданных высот и по разности высот, оцениваемых на основании двух последовательных изображений, приведенных соответственно к времени между двумя приемами последовательных сигналов и к времени между съемками последовательных изображений).
На основании оценочного времени до столкновения блок 4 обработки данных передает в устройство 3 пилотирования команду на уклонение, при этом команда уклонения может быть систематически одинаковой (поворот вправо или поворот влево) или может учитывать, например, вертикальную скорость (набор высоты или снижение) постороннего летательного аппарата.
Таким образом, понятно, что для навигации беспилотного аппарата А было учтено подтвержденное оценочное расстояние.
Следует отметить, что модуль сопоставления выбирает в качестве идентификатора тот идентификатор, для которого оценочная высота по существу равна переданной высоте (при этом оценочное расстояние подтверждено). Если предположить, что были выбраны несколько идентификаторов, то в качестве идентификатора модуль сопоставления выбирает тот, который соответствует наименее благоприятному случаю, характеризующемуся наименьшим оценочным расстоянием и наиболее высокой скоростью сближения.
Если ни одна из переданных высот по существу не равна оценочной высоте, выбранный код идентификации будет принадлежать к модулю сопоставления то тех пор, пока данные, связанные с этим кодом идентификации, не будут соответствовать переданному идентификатору и связанным с ним данным.
Так, код идентификации принадлежит к модулю сопоставления, если не был принят ни один сигнал, или к выделенному из сигнала идентификатору, если такой сигнал был принят.
Следует также отметить, что направленная антенна позволяет устранить разночтения во время сопоставления, позволяя определить направление передачи сигнала и проверить его совместимость с пеленгом, определенным на изображении. В этом случае предпочтительно также выделять на изображениях угол места, для которого можно проверить соответствие с направлением передачи. Кроме того, угол места можно использовать, чтобы определять траекторию постороннего летательного аппарата с целью выработки маневра уклонения и/или уточнения вероятности столкновения.
Кроме того, предпочтительно блок 4 обработки выполнен также с возможностью определения скорости сближения с посторонним летательным аппаратом на основании размера постороннего летательного аппарата на двух последовательных изображениях, снятых оптоэлектронным устройством. Для этого модуль обработки изображения выделяет в каждом изображении телесный угол, образованный поверхностью постороннего летательного аппарата на каждом изображении, или размер в пикселях постороннего летательного аппарата на каждом изображении. Путем сравнения с сигнатурами, содержащимися в банке сигнатур летательных аппаратов, можно определить оценочное расстояние между беспилотным аппаратом и посторонним летательным аппаратом (можно также использовать размер постороннего летательного аппарата, полученный на основании данных, содержащихся в сигнале режима S). Блок 4 обработки выполнен с возможностью выдавать периодически значения скорости сближения на основании изменения телесного угла или размера в пикселях постороннего летательного аппарата, полученного путем сравнения этих данных на двух последовательных изображениях.
Таким образом, в отсутствие транспондера на постороннем летательном аппарате для определения риска столкновения и необходимого маневра уклонения используют только данные, выделенные на изображениях, полученных от оптоэлектронного устройства обнаружения.
Кроме того, если посторонний летательный аппарат оснащен транспондером, скорости сближения, полученные путем обработки изображений, можно сравнить со скоростями сближения, полученными в зависимости от изменения оценочного расстояния, вычисленного в зависимости от мощности принятых сигналов. Это позволяет подтвердить или скорректировать результаты, выданные модулем сопоставления. Таким образом, можно сравнивать и анализировать полученные результаты, используя только данные, поступающие от оптоэлектронного устройства 6, и полученные результаты, используя также данные, выделенные в сигналах, чтобы выбрать наименее зашумленные результаты.
В варианте блок 4 обработки связан также с запросчиком, выполненным с возможностью передачи запросов в транспондеры близко летящих летательных аппаратов.
Разумеется, изобретение не ограничивается описанными вариантами осуществления и охватывает любую версию, не выходящую за рамки изобретения, определенные в формуле изобретения.
В частности, изобретение можно применять с транспондерами, работающими в других режимах, отличных от режима S, например, в режиме С или в режимах транспондеров военных самолетов. Если сигнал не содержит идентификатора, в принятом сигнале выявляют соответствующие данные для идентификации соответствующего канала.
Изобретение можно также применять с системой автоматического зависимого контроля ADS-B, в которой посторонний летательный аппарат периодически и во всех направлениях передает сигнал, содержащий, в частности, его положение и его высоту.
В варианте изобретения данными позиционирования является пеленг постороннего летательного аппарата, при этом способ содержит этапы, на которых:
- вычисляют оценочный пеленг постороннего летательного аппарата на основании высоты полета беспилотного аппарата, переданной высоты и оценочного расстояния;
- оценочный пеленг сравнивают с пеленгом, определенным на основании изображения, и для навигации учитывают оценочное расстояние, если оценочный пеленг по существу соответствует пеленгу, определенному на основании изображения.
Блок обработки данных может быть выполнен с возможностью извлечения из изображения других данных, отличных от вышеуказанных, например, угла места постороннего летательного аппарата. В описанном способе этот угол места не используют, так как считается, что посторонний летательный аппарат летит прямо на беспилотный аппарат, чтобы принимать во внимание наиболее критическую ситуации для навигации беспилотного аппарата. Угол места можно использовать для определения траектории постороннего летательного аппарата, чтобы уточнить вероятность столкновения и необходимый маневр уклонения.
Используемыми высотами могут быть барометрические высоты и/или высоты, полученные при помощи устройства спутниковой геолокализации.
Устройство управления полетом для летательного аппарата
Оптоэлектронный прицел с модульной броневой защитой
Устройство соединения схемы или радиочастотного компонента, напечатанных на мягкой подложке, с коаксиальным проводом
Ротор электродвигателя с наружной оболочкой, образованной путем намотки, способ изготовления такого ротора и электродвигатель с таким ротором
Способ и моторизованное устройство наводки
Оптоэлектронная система наблюдения с переменным оптическим полем
Устройство ввода/вывода для передачи и/или приема данных на и/или от устройства управления
Блокируемый привод и соответствующий ограничитель момента
Способ геопозиционирования мобильных устройств, перемещающихся внутри замкнутой структуры
Электрическая система управления полетом для летательного аппарата
Способ предупреждения столкновения с воздушным судном и беспилотный аппарат, оснащённый системой для осуществления этого способа

