Результат интеллектуальной деятельности: Способ позиционирования подводных объектов
Вид РИД
Изобретение
Изобретение относится к способам навигации подводных объектов (подводных лодок, обитаемых и необитаемых подводных аппаратов), конкретно к способам их позиционирования.
Одним из основных направлений позиционирования подводных объектов (ПО) является использование гидроакустических маяков (ГМ). Известен целый ряд способов позиционирования ПО с использованием ГМ: способ длинной базы, короткой базы, ультракороткой базы, способ одномаяковой навигации и др. [1-6]. Достоинствами этих способов является скрытность и, как правило, высокая точность позиционирования ПО. К их недостаткам относятся малый радиус действия (до 10 км).
Известен способ позиционирования ПО [7], выбранный в качестве прототипа, включающий:
- установку в морской среде за пределами прибойной зоны на глубинах, превышающих в 5-10 раз длину волны излучаемого гидроакустического сигнала, как минимум, двух стационарных ГМ, периодически излучающих гидроакустические сигналы на частоте ниже 10 кГц и синхронизированных системой единого времени между собой и с акустическим приемником, расположенном на ПО;
- выставление в районе работ ПО, как минимум, одного радиогидроакустического буя (РГБ) с приемником спутниковой навигационной системы и гидрофоном;
- периодическое определение РГБ собственных координат по принимаемым гидроакустическим сигналам спутниковой навигационной системы;
- прием гидрофоном РГБ гидроакустических сигналов от всех ГМ и трансляция их, а также собственных координат по радиоканалу на пункт управления;
- определение на пункте управления времен распространения гидроакустического сигнала между каждым ГМ и РГБ и расстояния между ними и с их использованием вычисление текущей скорости распространения гидроакустического сигнала между каждым ГМ и РГБ;
- передача от командного пункта каждому ГМ текущей скорости распространения гидроакустического сигнала между ним и РГБ;
- периодическое излучение всеми ГМ гидроакустических сигналов, содержащих в закодированном виде информацию об условном номере ГМ, излучившего гидроакустический сигнал, моменте времени излучения и текущей скорости распространения гидроакустического сигнала;
- прием и декодирование каждого излученного гидроакустического сигнала гидроакустическим приемником ПО с измерением и запоминанием момента времени обнаружения гидроакустического сигнала;
- вычисление текущей дистанции до каждого ГМ как произведение скорости распространения гидроакустического сигнала на разность между моментами времен приема и излучения гидроакустического сигнала каждым ГМ;
- определение текущих координат ПО с использованием вычисленных дистанций до каждого ГМ и хранящихся в памяти вычислителя координат каждого ГМ.
Способ-прототип проиллюстрирован на фиг.1.
Достоинством описанного способа-прототипа является возможность скрытного (без всплытия на поверхность) позиционирования всех подводных объектов, находящихся в районе площадью до 100 тыс. км2, причем не периодически, а практически непрерывно (с интервалом в единицы минут).
Недостатками описанного способа-прототипа являются:
- ограниченная точность определения координат ПО, ввиду того, что скорость распространения гидроакустических сигналов, определенная на трассе "ГМ - РГБ", может существенно отличаться от скорости распространения гидроакустических сигналов на трассе "ГМ - ПО". Моделирование, проведенное для района площадью 100 тыс. км2, расположенного в северозападной части Тихого океана, показало, что эта разница в зависимости от взаимного расположения ГМ и ПО может достигать 1%, таким образом на трассе "ГМ - ПО" в 500 км ошибка в определении координат может составить 5 км.
- необходимость выставления в районе при помощи корабля либо авиации специального РГБ для определения скоростей распространения гидроакустического сигнала от каждого ГМ и его периодической замены (ввиду ограниченного времени действия). Следствием этого является высокая сложность и стоимость реализации способа.
Решаемая техническая проблема - совершенствование способов позиционирования ПО.
Технический результат - повышение точности и уменьшение трудоемкости позиционирования ПО.
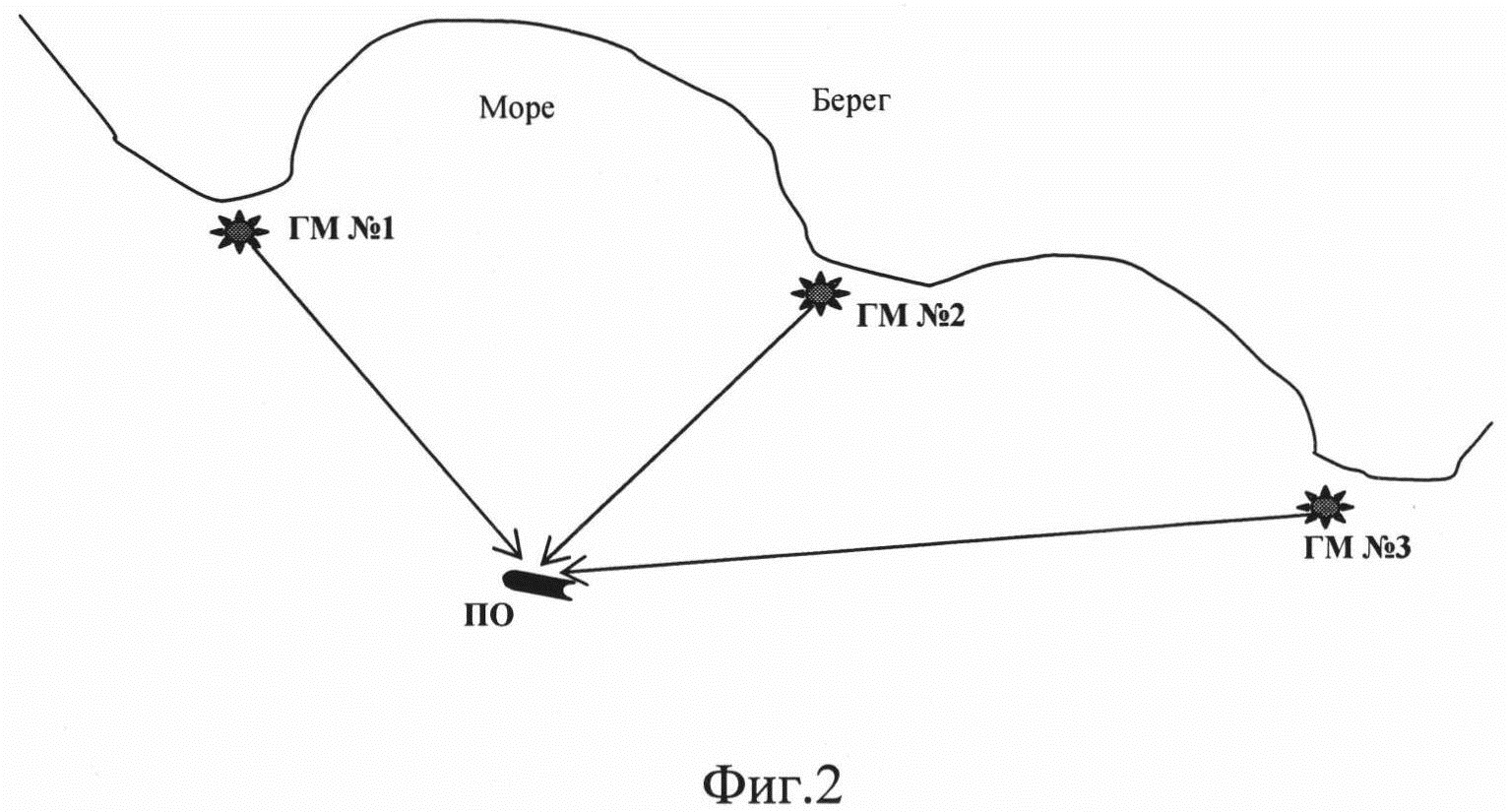
Указанный технический результат достигается тем, что в отличие от способа-прототипа для определения (уточнения) скорости распространения гидроакустического сигнала между ГМ и ПО вместо РГБ используется сам ПО, который периодически определяет свои координаты одним из известных способов (например, по сигналам спутниковой либо радионавигационной системы) и использует эту информацию для вычисления текущих скоростей распространения гидроакустического сигнала между каждым ГМ и ПО.
Иллюстрация заявляемого способа приведена на фиг. 2.
Заявляемый способ включает:
- установку в морской среде за пределами прибойной зоны на глубинах, превышающих в 5-10 раз длину волны излучаемого гидроакустического сигнала, как минимум, двух стационарных ГМ, периодически излучающих гидроакустические сигналы на частоте ниже 10 кГц и синхронизированных системой единого времени между собой и с акустическим приемником, расположенном на ПО;
- периодическое излучение всеми ГМ сложных гидроакустических сигналов, содержащих в закодированном виде информацию об условном номере ГМ, излучившего гидроакустический сигнал, и моменте времени излучения;
- прием и декодирование каждого излученного гидроакустического сигнала гидроакустическим приемником ПО с фиксацией времени обнаружения гидроакустического сигнала;
- с использованием времен излучения и приема гидроакустических сигналов ГМ вычисление в бортовом устройстве вычисления координат времени распространения до ПО гидроакустического сигнала каждого ГМ;
- периодически:
 определение координат ПО с использованием сигналов спутниковой навигационной либо радионавигационной системы;
определение координат ПО с использованием сигналов спутниковой навигационной либо радионавигационной системы;
с использованием полученных координат ПО и известных координат ГМ вычисление текущих расстояний между каждым ГМ и ПО;
с использованием вычисленных текущих расстояний и времен распространения гидроакустического сигнала вычисление и запоминание текущей скорости распространения гидроакустического сигнала между каждым ГМ и ПО;
- вычисление текущей дистанции до каждого ГМ как произведение времени распространения до ПО гидроакустического сигнала ГМ на хранящуюся в памяти бортового устройства вычисления координат последнюю по времени определения скорость распространения гидроакустического сигнала между ГМ и ПО;
- определение текущих координат ПО с использованием вычисленных дистанций до каждого ГМ и координат каждого ГМ, хранящихся в памяти бортового устройства вычисления координат.
Заявляемый способ свободен от недостатков способа-прототипа, поскольку:
- скорость распространения гидроакустических сигналов между ГМ и ПО определяется непосредственно по трассе "ГМ - ПО", что позволяет повысить точность определения координат ПО (по результатам моделирования на 1% от дистанции между ГМ и ПО);
- интервал времени между последовательными определениями скорости распространения гидроакустических сигналов ГМ может быть выбран таким образом, что изменение скорости распространения гидроакустических сигналов ГМ на этом интервале не окажет существенного влияния на точность определения координат ПО;
- исключается необходимость выставления в районе РГБ.
Таким образом, заявленный технический результат - повышение точности и уменьшение трудоемкости позиционирования ПО - можно считать достигнутым.
Источники информации:
1. Справочник штурмана под ред. В.Д. Шандабылова // М.: Воениздат, 1968, 540 с.
2. Kinsey J.C., Eustice R.M., Whitcomb L.L. A Survey of Underwater Vehicle Navigation: Recent Advances and new Challenges // IF AC Conference on maneuvering and control of marine craft, 2006, Lisbon, Portugal.
3. Малеев П.И. Проблемы средств навигации АНПА и возможные пути их решения // Навигация и гидрография, 2015, №39. - С. 7-11.
4. Кебкал К.Г., Машошин А.И. Гидроакустические методы позиционирования автономных необитаемых подводных аппаратов // Гироскопия и навигация, 2016, №3 (94), с. 115-130.
5. Дубровин Ф.С., Щербатюк А.Ф. Исследование некоторых алгоритмов одномаяковой мобильной навигации АНПА: результаты моделирования и морских испытаний // Гироскопия и навигация, 2015, №4, с. 160-170.
6. Милн П.Х. Гидроакустические системы позиционирования // Л.: Судостроение, 1989.
7. Патент РФ №2469346.
Способ позиционирования как минимум одного подводного объекта (ПО), снабженного гидроакустическим приемником и бортовым устройством вычисления координат, включающий установку в морской среде за пределами прибойной зоны на глубинах, превышающих в 5-10 раз длину волны излучаемого гидроакустического сигнала, как минимум, двух стационарных гидроакустических маяков (ГМ), синхронизированных системой единого времени между собой и с ПО, введение координат каждого ГМ в бортовое устройство вычисления координат ПО, излучение ГМ сложных гидроакустических сигналов на частоте ниже 10 кГц с заложенными в них посредством кодирования условного номера ГМ и времени излучения, прием гидроакустических сигналов гидроакустическим приемником ПО с фиксацией времени приема, извлечение путем декодирования из принятых гидроакустических сигналов номера ГМ и времени излучения гидроакустического сигнала, вычисление координат ПО с использованием известных координат ГМ, текущих скоростей распространения гидроакустических сигналов между каждым ГМ и ПО и времен распространения гидроакустических сигналов между каждым ГМ и ПО, отличающийся тем, что ПО периодически с использованием сигналов спутниковой навигационной системы определяет свои текущие координаты, с использованием которых, а также известных координат ГМ и времен распространения гидроакустических сигналов между каждым ГМ и ПО вычисляет и запоминает текущие скорости распространения гидроакустического сигнала между каждым ГМ и ПО, которые затем используются для определения координат ПО.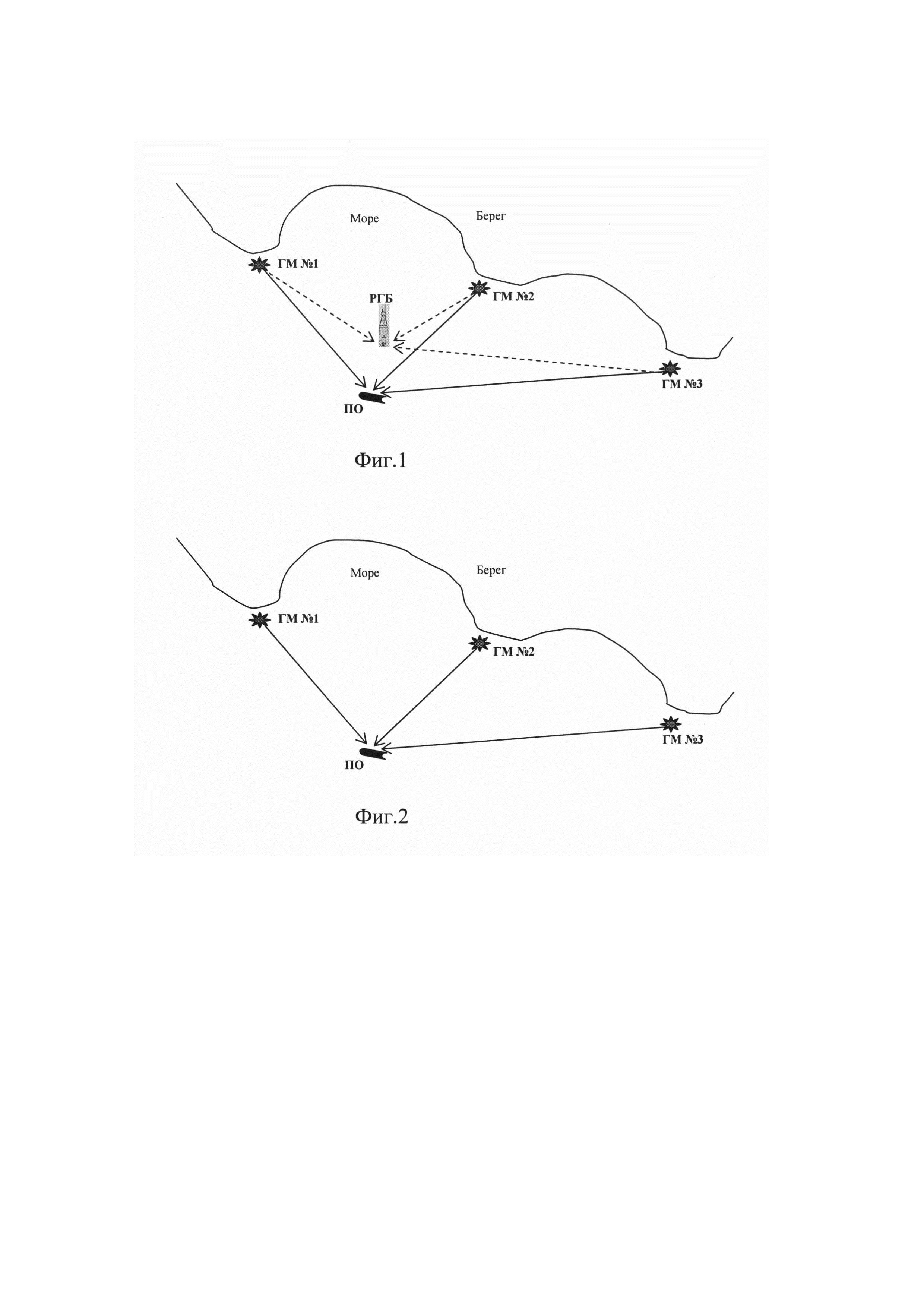
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Стенд для выработки угловых колебаний в двух плоскостях
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Микромеханический вибрационный гироскоп
Способ определения погрешностей двухстепенного поплавкового гироскопа с газодинамическим подвесом ротора гиромотора
Способ бесплатформенной инерциальной навигации на микромеханических чувствительных элементах
Способ изготовления ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп
Способ обработки информации в гидроакустической антенне
Способ оценки полного профиля вертикального распределения скорости звука
Способ получения упругого и звукопоглощающего полимерного материала с термопластичными микросферами
Бескорпусная гидроакустическая антенна
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Способ определения координат (пеленга и дистанции) и параметров движения (курса и скорости) морской шумящей цели
Способ формирования характеристики направленности плоской, горизонтально расположенной многоэлементной излучающей антенны доплеровского лага
Способ измерения скорости судна доплеровским лагом
Способ измерения скорости судна доплеровским лагом
Способ измерения скорости судна доплеровским лагом

