Результат интеллектуальной деятельности: Способ измерения скорости судна доплеровским лагом
Вид РИД
Изобретение
Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения скорости судна доплеровским методом.
Одним из условий безопасного кораблевождения является постоянный контроль абсолютной (относительно дна) скорости судна.
Измерение абсолютной скорости судна обеспечивается с помощью доплеровского лага [1-6]. И хотя на надводных кораблях и судах вместо доплеровского лага все чаще используется спутниковая навигационная система, на подводных лодках и подводных аппаратах (обитаемых и необитаемых) доплеровский лаг продолжает оставаться основным средством измерения абсолютной скорости.
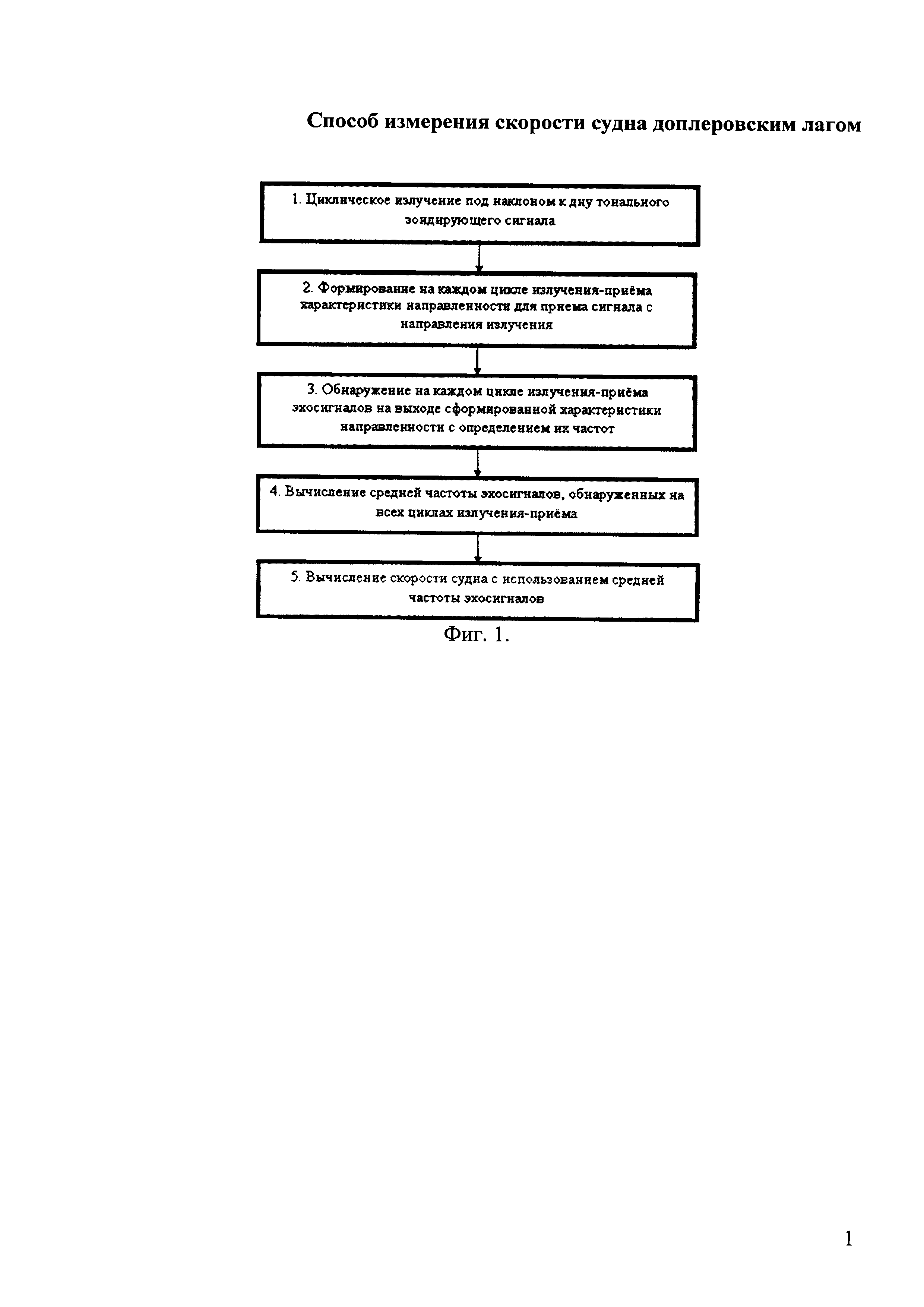
В качестве прототипа выбран описанный в работе [1] и поясненный на фиг. 1 способ измерения скорости судна доплеровским лагом, включающий циклическое излучение под наклоном к дну тонального зондирующего сигнала, формирование на каждом цикле излучения - приема характеристики направленности для приема сигнала с направления излучения; обнаружение эхосигналов на каждом цикле излучения - приема на выходе сформированной характеристики направленности; определение частоты обнаруженного эхосигнала; вычисление средней частоты эхосигналов, полученных на разных циклах излучения; вычисление скорости судна по формуле:

где V - скорость судна, м/с;
ƒЗC - частота зондирующего сигнала (ЗС), Гц;
ƒЭС/ср - средняя частота эхосигналов (ЭС), полученных на разных циклах излучения, Гц;
ψизл - угол между направлением излучения ЗС и направлением вертикально вниз, град (как правило, ψизл=30°);
Сzv - скорость звука в воде, м/с.
Недостатком описанного способа является низкая точность определения скорости судна при наличии течения и водных звукорассеивающих слоев (далее - звукорассеивающий слой). Объясняется это тем, что при наличии течения и водных звукорассеивающих слоев на одном цикле излучения может быть обнаружено несколько эхосигналов с разными частотами. В результате при осреднении частот всех ЭС, обнаруженных на разных циклах излучения, полученная средняя частота будет смещена относительно фактической частоты ЭС, отраженного от дна. Как следствие, будет смещена и оценка скорости судна, вычисляемая по формуле (1).
Решаемая техническая проблема - повышение эксплуатационных характеристик доплеровского лага.
Достигаемый технический результат - повышение надежности обнаружения эхосигналов, отраженных от морского дна, при наличии во входном сигнале, кроме эхосигналов, отраженных от дна, также эхосигналов, отраженных от звукорассеивающих слоев.
Заявляемый способ достигается следующими действиями, отличающими его от прототипа:
1) при обнаружении каждого эхосигнала дополнительно к определению его частоты определяется время его обнаружения относительно времени излучения зондирующего сигнала;
2) оценки частот и времен обнаружения эхосигналов, обнаруженных на разных циклах излучения зондирующего сигнала, перед осреднением подвергаются траекторному анализу, реализуемому, например, с использованием алгоритма последовательного анализа Вальда [7]. В результате траекторного анализа эхосигналы, отраженные от дна, отделяются от эхосигналов, отраженных от звукорассеивающих слоев;
3) осреднение частот эхосигналов выполняется отдельно для эхосигналов, отраженных от дна, и эхосигналов, отраженных от каждого звукорассеивающего слоя.
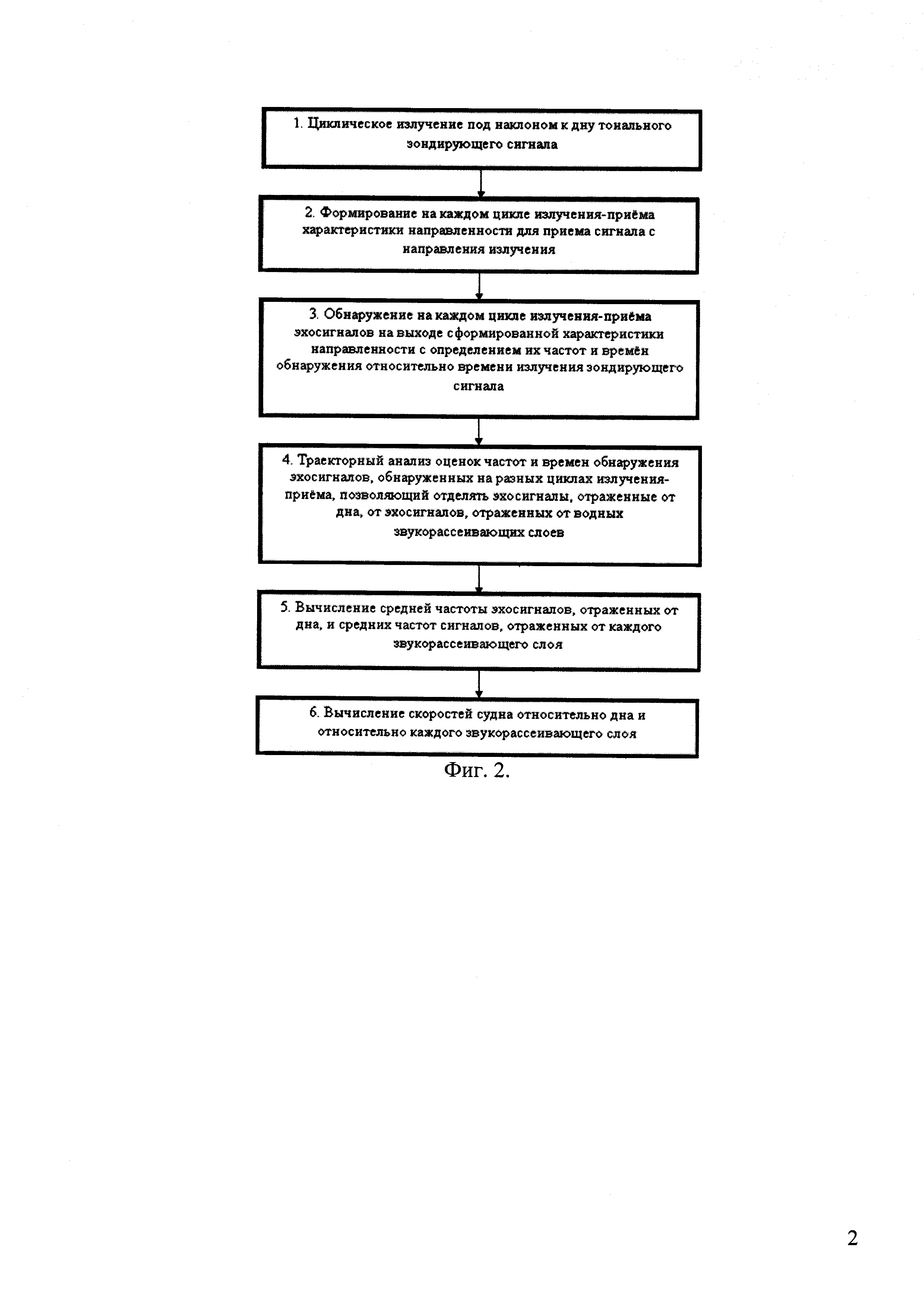
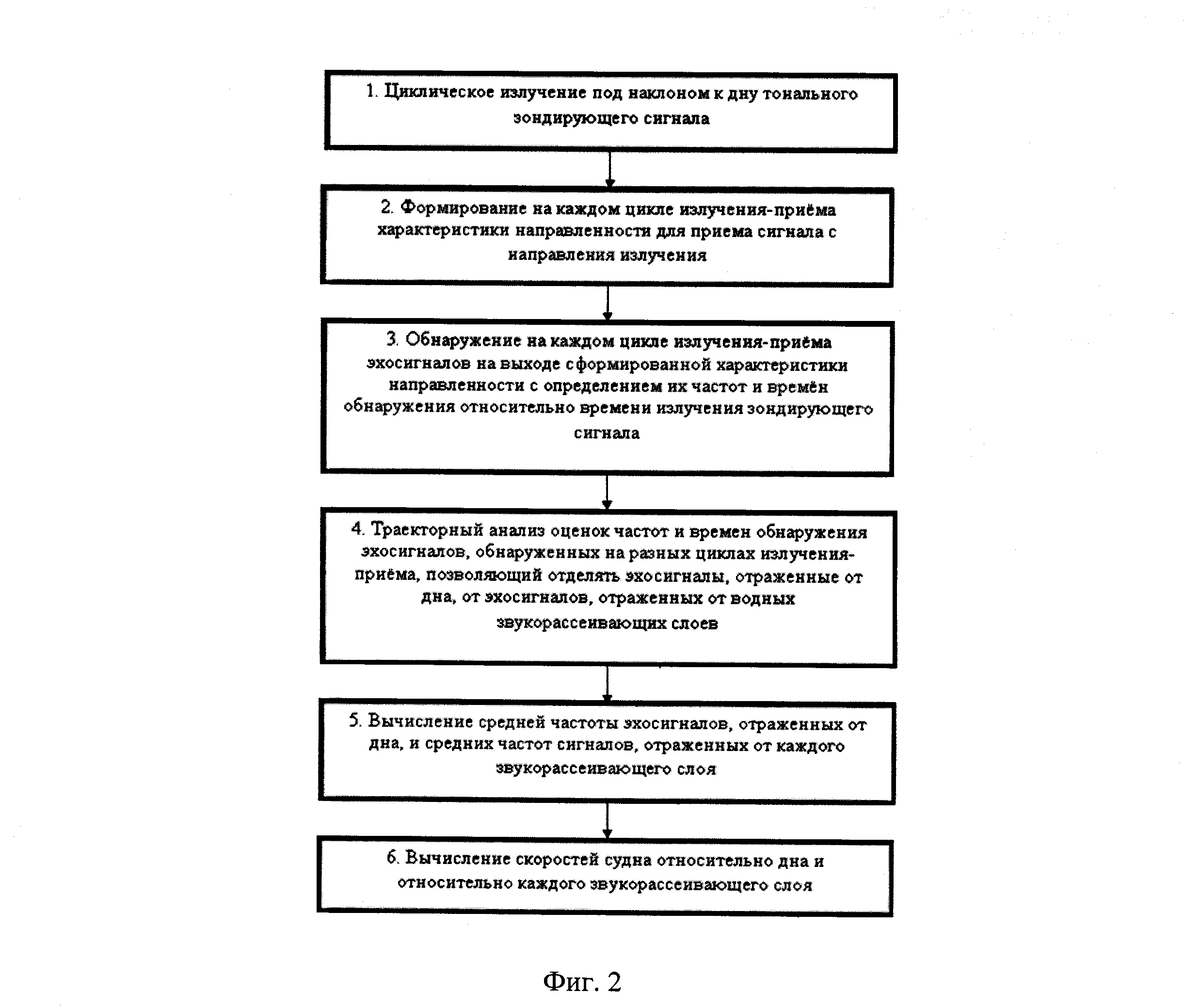
Блок схема заявляемого способа изображена на фиг. 2.
В блоке 1 осуществляется циклическое излучение под наклоном к дну тонального зондирующего сигнала.
В блоке 2 на каждом цикле излучения зондирующего сигнала выполняется формирование характеристики направленности для приема сигнала с направления излучения.
В блоке 3 на каждом цикле излучения выполняется процедура обнаружения эхосигналов. Для каждого обнаруженного эхосигнала определяются его частота и время его обнаружения относительно времени излучения зондирующего сигнала.
В блоке 4 осуществляется траекторный анализ оценок частот и времен обнаружения эхосигналов, обнаруженных на разных циклах излучения, в результате чего эхосигналы, отраженные от дна, отделяются от эхосигналов, отраженных от звукорассеивающих слоев.
В блоке 5 выполняется усреднение частот эхосигналов отдельно для эхосигналов, отраженных от дна, и эхосигналов, отраженных от каждого звукорассеивающего слоя.
В блоке 6 по формуле (1) вычисляются скорости судна относительно дна и относительно каждого звукорассеивающего слоя.
Таким образом, обеспечивается повышение надежности обнаружения ЭС от морского дна при наличии во входном сигнале, кроме эхосигналов, отраженных от дна, также эхосигналов, отраженных от звукорассеивающих слоев, за счет применения блока траекторного анализа принятых ЭС, позволяющего производить межцикловую идентификацию и корректное усреднение параметров ЭС.
Технический результат подтвержден имитационным моделированием и экспериментально.
Источники информации:
1. Виноградов К.А., Кошкарев В.Н., Осюхин Б.А., Хребтов А.А. Абсолютные и относительные лаги, - Л.: Судостроение, 1990.
2. Хребтов А.А., Виноградов К.А., Кошкарев В.Н. и др. Судовые измерители скорости.- Л.: Судостроение, 1978.
3. Патент РФ №2439613. Гидроакустический доплеровский лаг с алгоритмом многоальтернативной фильтрации эхосигнала, основанным на использовании банка фильтров Калмана.
4. Богородский В.В. Гидроакустическая техника исследования и освоения океана.- Л.: Гидрометиздат, 1984.
5. Гидроакустические навигационные средства. Под ред. В.В. Богородского. - Л.: Судостроение, 1983, 262 с.
6. Виноградов К.А., Новиков И.А. Гидроакустические навигационные системы и средства // Навигация и гидрография, ГНИИНГИ МО РФ, 1999, №7.
7. Ширяев А.Н. Статистический последовательный анализ. - М.: Наука, 1969.
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Стенд для выработки угловых колебаний в двух плоскостях
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Микромеханический вибрационный гироскоп
Способ определения погрешностей двухстепенного поплавкового гироскопа с газодинамическим подвесом ротора гиромотора
Способ бесплатформенной инерциальной навигации на микромеханических чувствительных элементах
Способ изготовления ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп
Способ обработки информации в гидроакустической антенне
Антенный модуль
Способ оценки полного профиля вертикального распределения скорости звука
Способ распознавания ложных целей, вызванных собственными помехами подвижного носителя
Способ получения упругого и звукопоглощающего полимерного материала с термопластичными микросферами
Бескорпусная гидроакустическая антенна
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Способ определения координат (пеленга и дистанции) и параметров движения (курса и скорости) морской шумящей цели
Способ формирования характеристики направленности плоской, горизонтально расположенной многоэлементной излучающей антенны доплеровского лага
Способ измерения скорости судна доплеровским лагом

