Результат интеллектуальной деятельности: Магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов
Вид РИД
Изобретение
Изобретение относится к движителям и может быть использовано на морских судах.
Недостатком известных устройств [1-3] является перемещение водного потока, что приводит к возникновению паразитных вихревых потоков и энергетическим потерям.
Целью предлагаемого изобретения является увеличение мощности и управляемости магнитогидродинамического программно-управляемого шагового двигателя для морских микродронов.
Техническим результатом является воздействие магнитным полем на анионы и катионы морской воды таким образом, что сам двигатель вместе с микродроном приобретет вращательно-поступательное движение, а сама морская вода будет оставаться практически неподвижной.
Указанный технический результат достигается тем, что магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов выполняется в виде двух цилиндрических труб вложенных друг друга с ортогонально размещенными электромагнитами и при пошаговом изменении силы тока в электромагнитах будет изменяться скорость истечения жидкости в зависимости от выбранного направления движения, причем, так как масса выталкиваемой жидкости будет превышать массу самого двигателя, вода будет оставаться неподвижной, а сам двигатель приобретет вращательно-поступательное движение с возможностью программно-управляемого маневрирования в любом направлении.
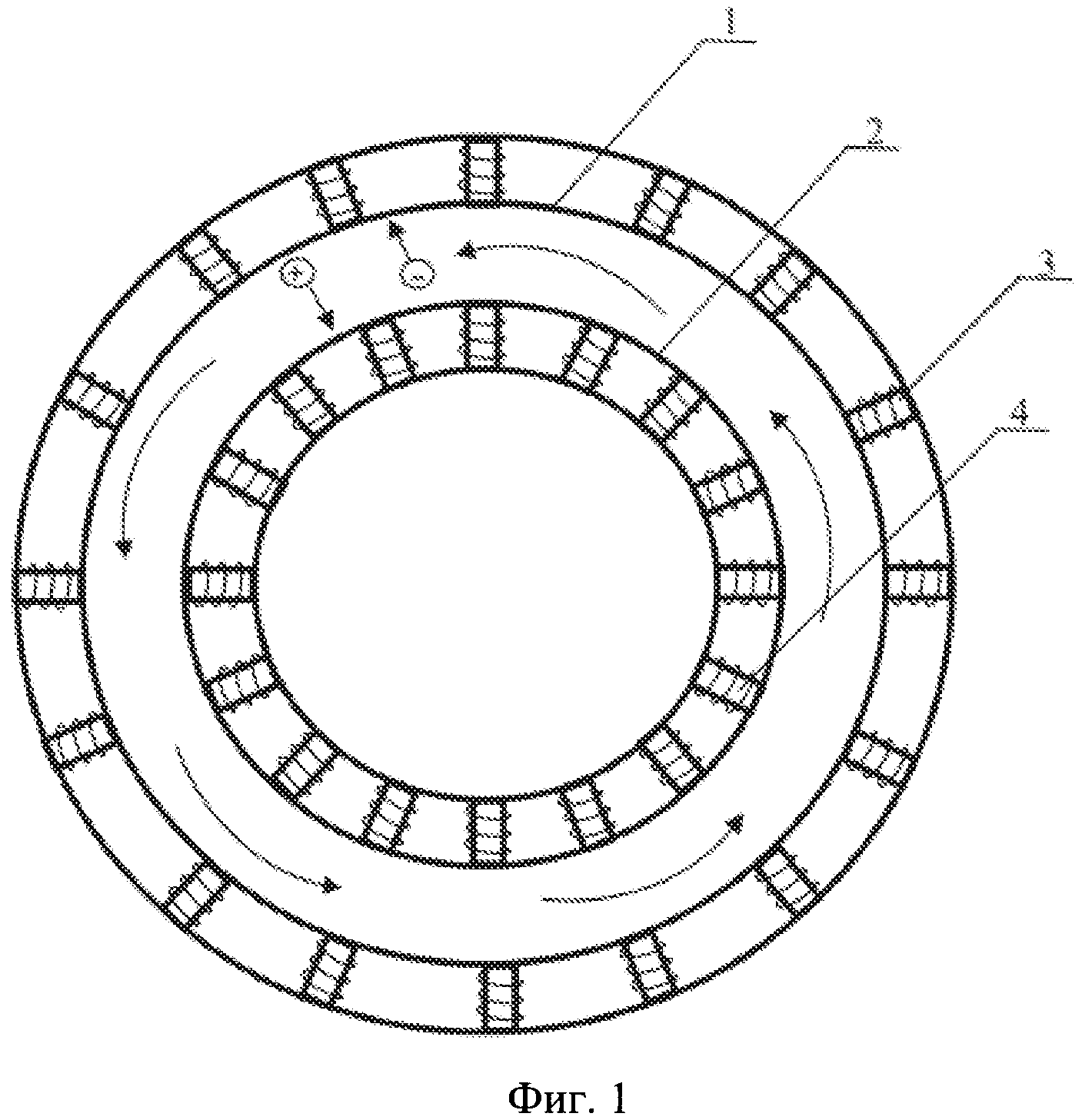
На фиг. 1 изображена схема магнитогидродинамического программно-управляемого шагового двигателя для морских микродронов. Металлический цилиндрический электрод 1 соединен с положительным полюсом источника питания, а металлический цилиндрический электрод 2 соединен с отрицательным полюсом источника питания. Под действием этих потенциалов положительные анионы в морской воде будут двигаться по радиальным направлениям от положительного электрода к отрицательному. Отрицательные катионы будут двигаться им навстречу. Шаговые электромагниты 3 на внешней трубе, расположены попарно с такими же электромагнитами 4 на внутренней трубе для формирования магнитного поля, которое при помощи силы Лоренца будет создавать взаимное отталкивание внешней и внутренней труб относительно анионов и катионов. Программное переключение электромагнитов приведет к возможности создания кругового перемещения импульса выталкивания. Если обе трубы закреплены, то в этом случае возникает вихревое движение жидкости с одновременным ее выталкиванием из пространства между внешней и внутренней трубой. Если же трубы не закреплены и масса двигателя меньше массы выталкиваемой воды, то вода будет оставаться практически неподвижной, а двигатель приобретет вращательно-поступательное движение. Управление скоростью вращения можно запрограммировать, изменяя скорость пошагового переключения электромагнитов, а изменяя величину потенциала на электродах и ток в шаговых электромагнитах, можно изменять скорость поступательного движения. Программно можно задавать, как поочередное одиночное включение пары ортогональных электромагнитов при выключенных всех остальных электромагнитах, так и увеличить количество включенных пар ортогональных электромагнитов до значения, при котором все электромагниты включены и по очереди по кругу каждая пара последовательно отключается. Если при переключении программно изменять силу тока в паре ортогональных электромагнитов таким образом, что в каком-либо секторе сила тока будет больше, чем в противоположном секторе, то в этом случае можно управлять не только скоростью вращения и поступательного движения, но и изменять произвольно вектор движения.
Так как, в движении участвует только сам микродрон с двигателем в виде цилиндрической трубы, а водная среда остается практически неподвижной, то это позволит осуществить практически бесшумное перемещение, а фактор малошумности имеет большое значение для военного применения и экологической безопасности.
Магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов способен работать на любых глубинах и при любых климатических условиях с высокой энергоэффективностью и управляемостью.
Литература
1. Патент РФ №2327597. Электромагнитный движитель / Герасимов Н.П., Легуша Ф.Ф., Поляшев Б.М.
2. Патент РФ №2271302. Способ перемещения тела в морской воде и устройство для его реализации / Дозоров Т.А., Смирнов Г.В.
3. Патент РФ №2280587. Движитель для перемещения судна в морской воде / Дозоров Т.А.
Магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов, выполненный в виде двух цилиндрических труб, вложенных друг в друга с ортогонально размещёнными электромагнитами, отличающийся тем, что при пошаговом изменении силы тока в электромагнитах будет изменяться скорость истечения жидкости в зависимости от выбранного направления движения, причем, так как масса выталкиваемой жидкости будет превышать массу самого двигателя, вода будет оставаться неподвижной, а сам двигатель приобретет вращательно-поступательное движение с возможностью маневрирования в любом направлении.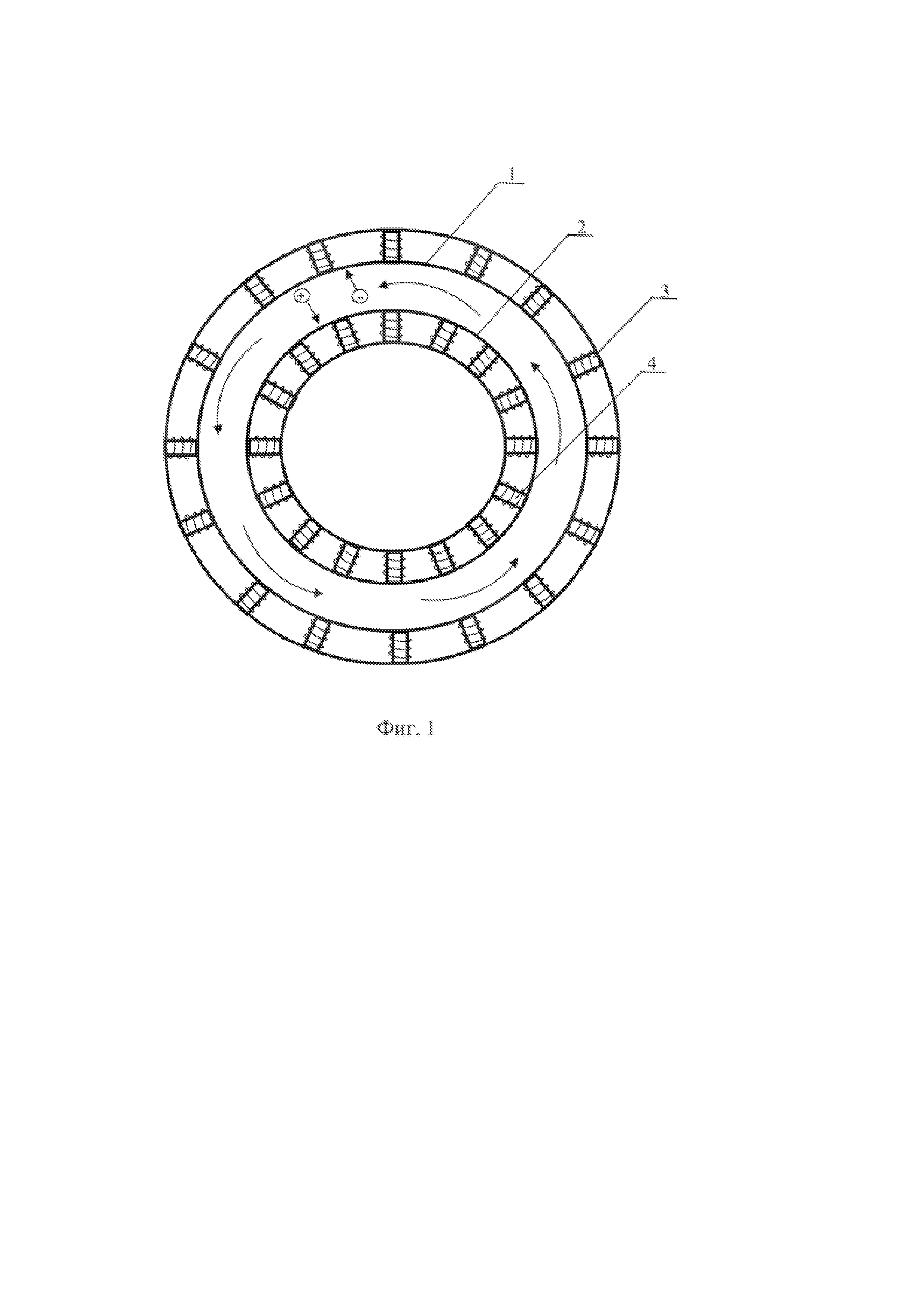
Программно-управляемая гидроакустическая цафар на базе "стаи" морских микродронов
Магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов
Способ формирования металлических порошков для аддитивных технологий в плазмотронной установке под воздействием ультразвука
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Каскадное светоизлучающее термоэлектрическое устройство
Светотранзистор с высоким быстродействием
Тепловая труба с применением трубчатых оптоволоконных структур
Энергоэффективное охлаждающее устройство
Способ отвода тепла от тепловыделяющих электронных компонентов в виде электромагнитной энергии на основе диодов ганна
Способ отвода тепла от тепловыделяющих электронных компонентов на основе применения полупроводниковых лазеров
Светотиристор
Способ отвода тепла от тепловыделяющих электронных компонентов в виде электромагнитной энергии на основе туннельных диодов
Устройство охлаждения на основе нанопленочных термомодулей
Термоэлектрический генератор с высоким градиентом температур между спаями

