Результат интеллектуальной деятельности: Магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов
Вид РИД
Изобретение
Изобретение относится к движителям и может быть использовано на морских судах.
Недостатком известных устройств [1-3] является ламинарное перемещение водного потока, что не позволяет получить большую тягу и управляемость.
Целью предлагаемого изобретения является увеличение мощности и управляемости магнитогидродинамического программно-управляемого вихревого двигателя для морских микродронов.
Техническим результатом является воздействие магнитным полем на анионы и катионы морской воды таким образом, что водный поток приобретет вихревую структуру с возможностью программного управления вектором тяги.
Указанный технический результат достигается тем, что магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов выполняется в виде двух цилиндрических металлических электродов вложенных друг друга с тремя электромагнитами, расположенными в форме правильного треугольника и при подаче трехфазных синусоидальных сигналов возникнет вращающееся магнитное поле в пространстве между цилиндрическими электродами, в результате чего анионы морской воды будут смещаться в сторону положительного электрода по радиальному направлению, а катионы будут двигаться им навстречу, что приведет под действием силы Лоренца к вихревому вращению в пространстве между цилиндрическими электродами с одновременным выталкиванием их вдоль образующей цилиндрических поверхностей, причем программное изменение параметров амплитуд и частоты синусоид позволяют осуществить управление вектором тяги двигателя.
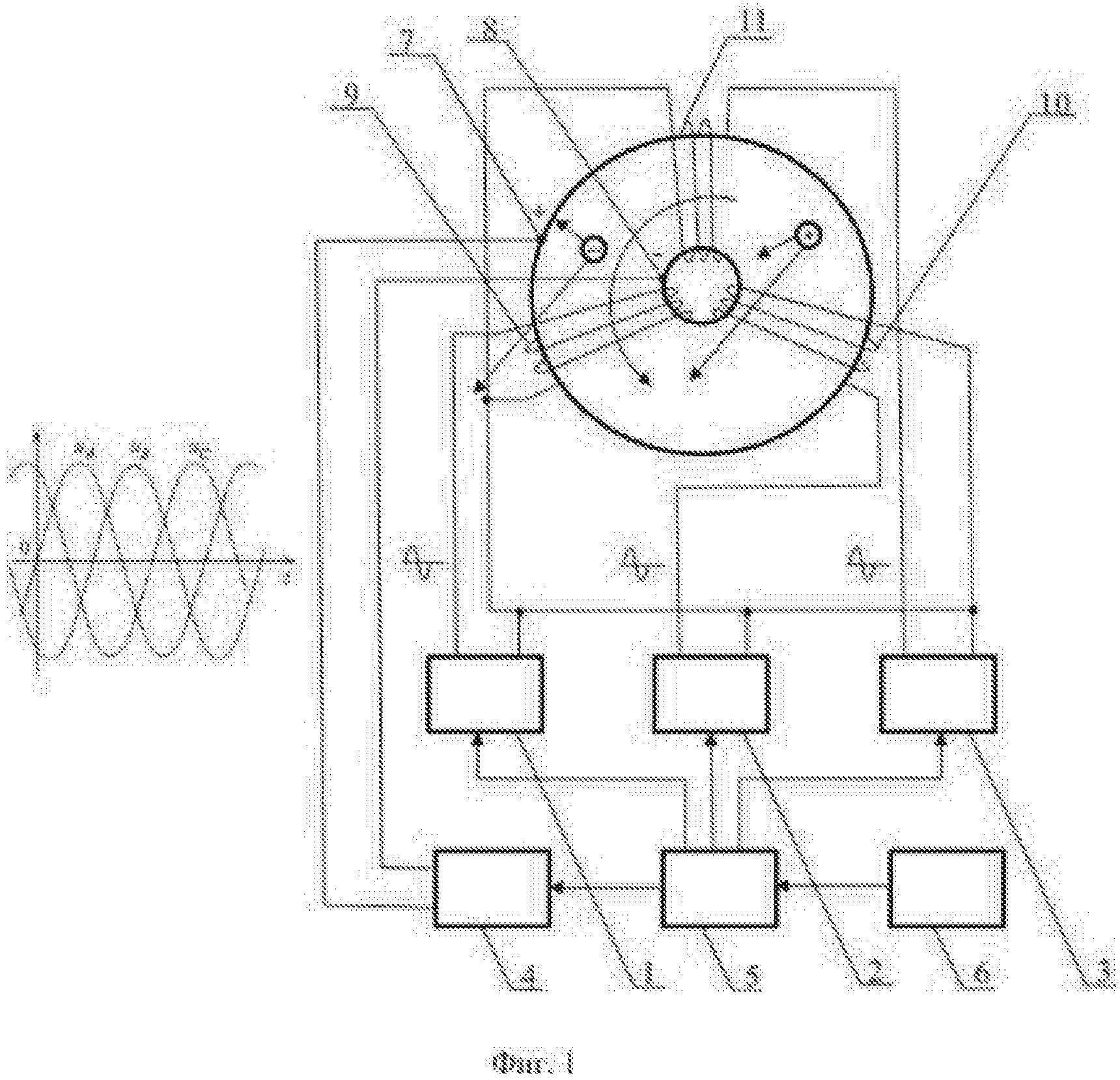
На фиг.1 изображена схема магнитогидродинамического программно-управляемого вихревого двигателя для морских микродронов.
Контроллер 6 через интерфейс 5 формирует при помощи ЦАП 4 разность потенциалов между цилиндрическими металлическими положительным электродом 7 и отрицательным электродом 8. В пространстве между цилиндрическими металлическими электродами 7 и 8 анионы и катионы начнут движение под действием электрического поля. Анионы приобретут радиальное смещение в сторону отрицательного цилиндрического металлического электрода 8, а катионы будут двигаться им навстречу в сторону положительного цилиндрического металлического электрода 7. При помощи ЦАП 1, 2, 3 контроллер 6 формирует трехфазное синусоидальное колебание, подаваемое на электромагнитные катушки 9, 10, 11 соответственно. В результате, будет сформировано вращающееся магнитное поле, имеющее сходство с аналогичными процессами в асинхронном трехфазном электродвигателе. Это вращающееся магнитное поле при помощи силы Лоренца придаст анионам и катионам вихревое вращательное вокруг цилиндрической оси и поступательное вдоль цилиндрической оси движение. В результате будет получено не ламинарное поступательное движение жидкости, как в обычном магнитогидродинамическом двигателе [1-3], а более мощное и устойчивое вихревое движение жидкости. Причем, контроллер 6 может управлять вектором тяги при изменении посредством ЦАП 1, 2, 3 параметров трехфазного синусоидального колебания таким образом, чтобы в выбранных секторах цилиндрической поверхности магнитное поле имело большую амплитуду и, следовательно, формировалась большая тяга в этом направлении. Таким образом, микродрон способен программно управлять вектором тяги двигателя для перемещения в выбранном направлении с заданной скоростью.
Магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов предназначен для функционирования в широком диапазоне глубин и параметров окружающей среды, при этом он обладает большей энергоэффективностью и надежностью.
Литература
1. Патент РФ №2327597. Электромагнитный движитель / Герасимов Н.П., Легуша Ф.Ф., Поляшев Б.М.
2. Патент РФ №2271302. Способ перемещения тела в морской воде и устройство для его реализации / Дозоров Т.А., Смирнов Г.В.
3. Патент РФ №2280587. Движитель для перемещения судна в морской воде / Дозоров Т.А.
Магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов, выполненный в виде двух цилиндрических металлических электродов, вложенных друг в друга, с тремя электромагнитами, расположенными в форме правильного треугольника, отличающийся тем, что при подаче трехфазных синусоидальных сигналов возникает вращающееся магнитное поле в пространстве между цилиндрическими электродами, в результате чего анионы морской воды будут смещаться в сторону положительного электрода по радиальному направлению, а катионы будут двигаться им навстречу, что приведет под действием силы Лоренца к вихревому вращению в пространстве между цилиндрическими электродами с одновременным выталкиванием их вдоль образующей цилиндрических поверхностей, причем программное изменение параметров амплитуд и частоты синусоид позволяет осуществить управление вектором тяги двигателя.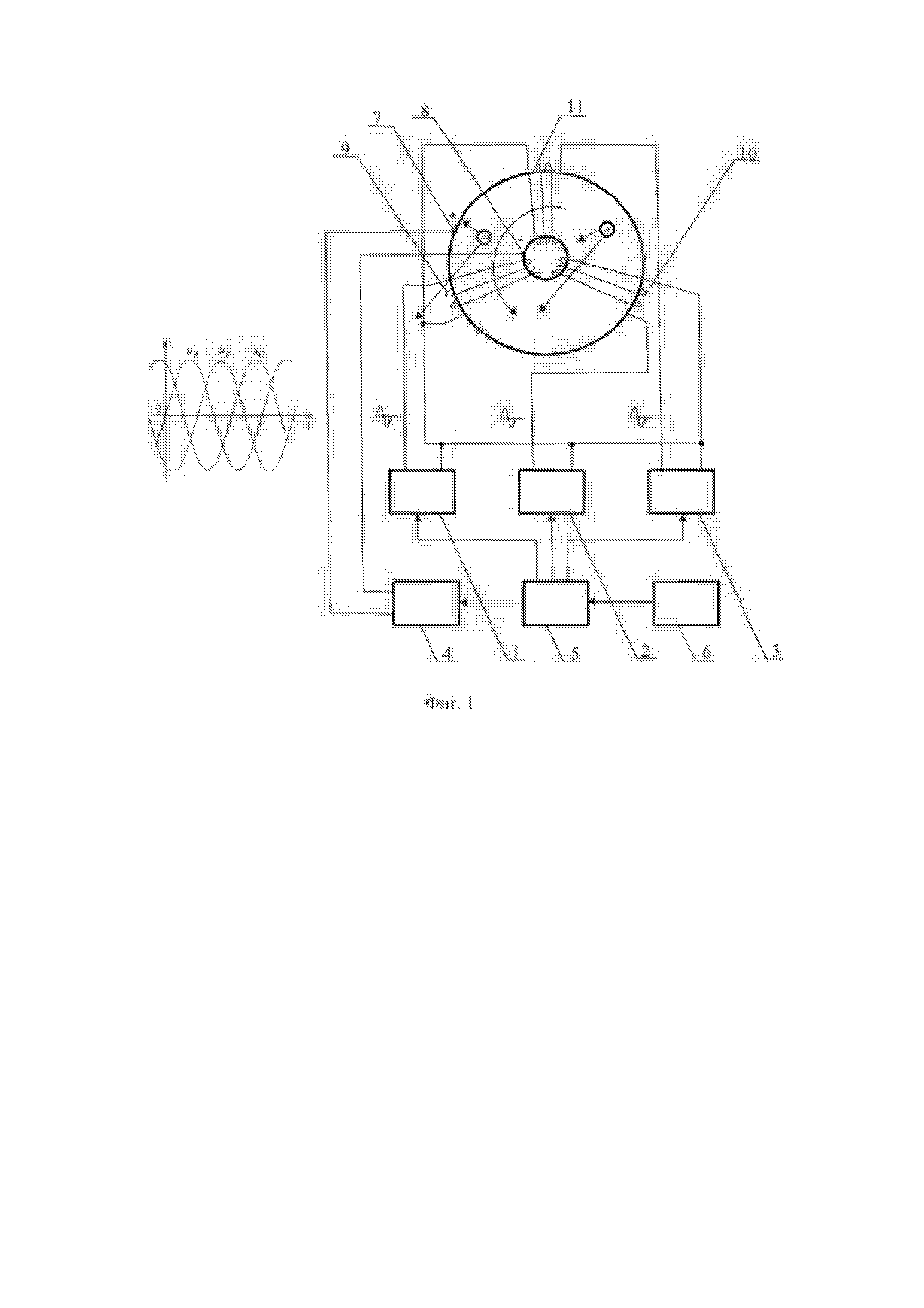
Программно-управляемая гидроакустическая цафар на базе "стаи" морских микродронов
Магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов
Способ формирования металлических порошков для аддитивных технологий в плазмотронной установке под воздействием ультразвука
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Каскадное светоизлучающее термоэлектрическое устройство
Светотранзистор с высоким быстродействием
Тепловая труба с применением трубчатых оптоволоконных структур
Энергоэффективное охлаждающее устройство
Способ отвода тепла от тепловыделяющих электронных компонентов в виде электромагнитной энергии на основе диодов ганна
Способ отвода тепла от тепловыделяющих электронных компонентов на основе применения полупроводниковых лазеров
Светотиристор
Способ отвода тепла от тепловыделяющих электронных компонентов в виде электромагнитной энергии на основе туннельных диодов
Устройство охлаждения на основе нанопленочных термомодулей
Термоэлектрический генератор с высоким градиентом температур между спаями

