Результат интеллектуальной деятельности: Программно-управляемая гидроакустическая ЦАФАР на базе "стаи" морских микродронов
Вид РИД
Изобретение
Изобретение относится к радиолокации.
Известна цифровая активная фазированная антенная решетка (ЦАФАР), у которой все приемопередающие модули расположены в одной плоскости [1]. Однако излучение от такой ЦАФАР не позволяет скрытно провести пеленгацию объектов без обнаружения собственных координат.
Цель изобретения — повышение эффективности ЦАФАР за счет применения магнитогидродинамического излучателя гидроакустических колебаний размещенных на морских микродронах в составе «стаи».
Техническим результатом является скрытная пеленгация надводных и подводных объектов по результатам обработки информации от ЦАФАР «стаи» морских микродронов.
Указанный технический результат достигается тем, что программно-управляемая гидроакустическая ЦАФАР на базе "стаи" морских микродронов реализована в форме распределенных компонентов единой системы и каждый микродрон управляемый бортовым микроконтроллером в строго определенные моменты времени выдает или принимает импульсные сигналы при помощи магнитогидродинамического излучателя гидроакустических колебаний, причем моменты передачи или приема для каждого микродрона в зависимости от его подводных координат индивидуально подбираются управляющим командным микродроном таким образом, что только в определенной точке сканируемого пространства сигналы будут синхронизированы для пеленгации объекта, причем уровень облучающих сигналов будет меньше уровня природных акустических помех и не позволит провести обнаружение как самого факта пеленгации, так и обнаружить местоположение микродронов.
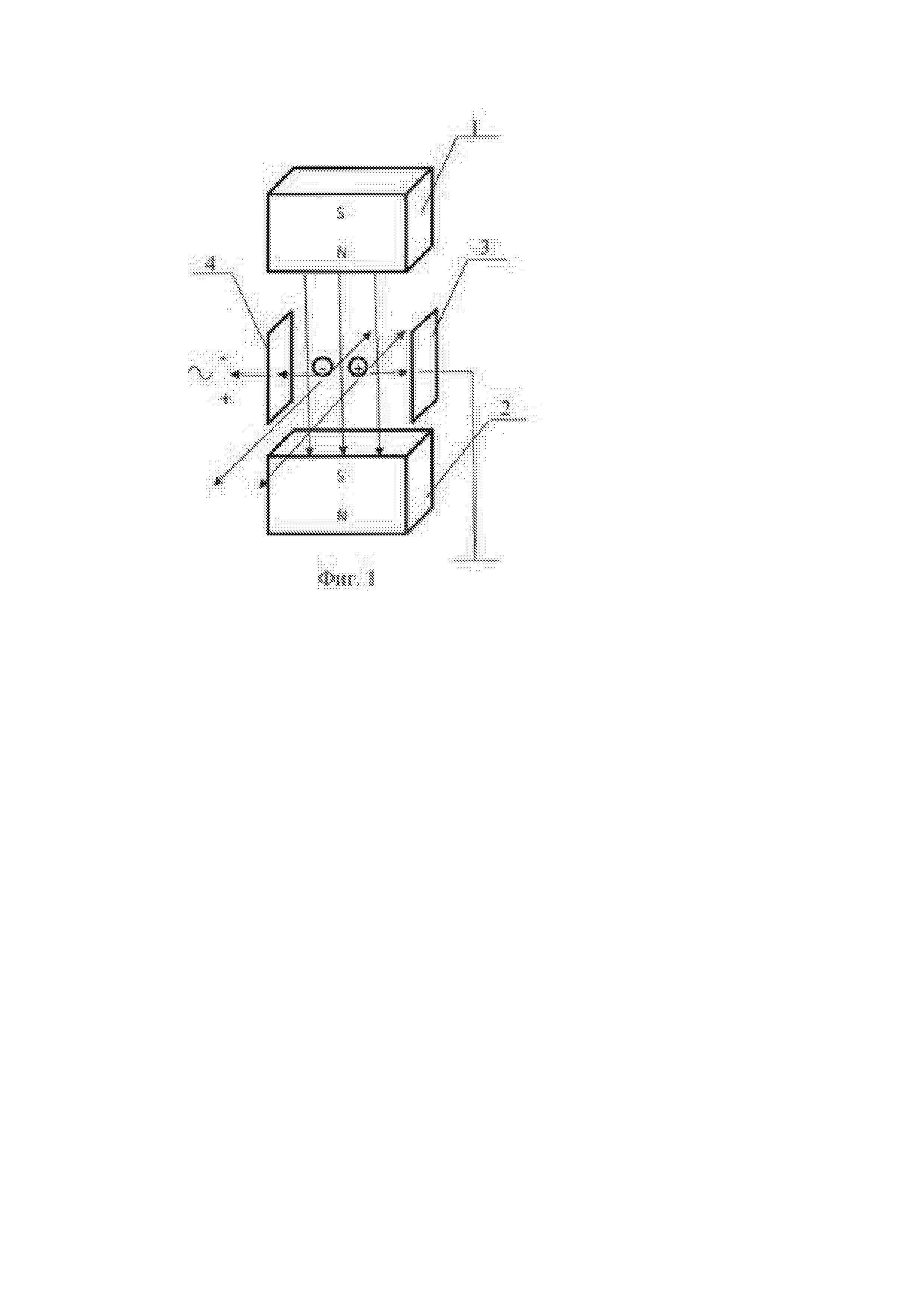
На фиг. 1 изображена схема функционирования магнитогидродинамического излучателя гидроакустических колебаний. Магнит 1 направлен северным полюсом в сторону южного полюса магнита 2. На электрод 3 подается нулевой потенциал, а на электрод 4, относительно электрода 3, подается либо отрицательный, либо положительный потенциалы. Если на электрод 4 подан отрицательный потенциал, то анионы будут двигаться в сторону отрицательного потенциала, а катионы им навстречу в сторону нулевого потенциала на электроде 3. Под действием силы Лоренца они будут смещаться ортогонально в одну сторону поперек магнитных и электрических силовых линий. Если же на электрод 4 будет подан положительный потенциал, то анионы и катионы будут двигаться в противоположном направлении. Таким образом, можно формировать акустические колебания в жидкой электролитической среде без промежуточных устройств в виде пьезоэлектрических излучателей и т.д. Причем, диапазон колебаний у такого излучателя может быть любым от 0 и до 10 МГц, т.к. отсутствуют механические структуры с собственными резонансными частотами с нелинейными погрешностями.
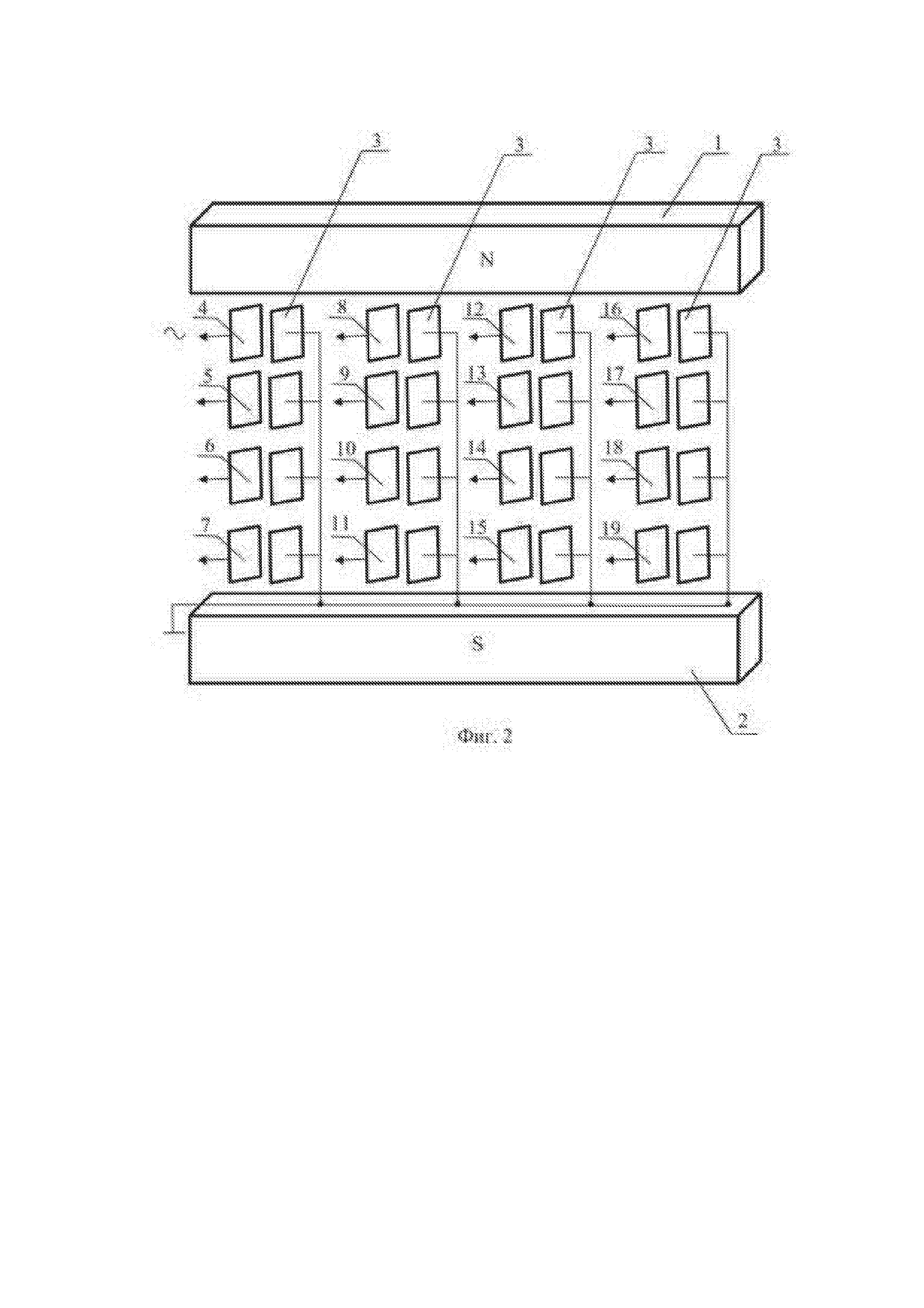
На фиг. 2 приведена примерная схема магнитогидродинамической гидроакустической ЦАФАР для морских микродронов в виде шестнадцати излучателей. Магниты 1 и 2 являются общими для всех излучателей гидроакустических колебаний также, как и нейтральный электрод 3 с нулевым потенциалом. Электроды 4-19 в индивидуальном порядке получают сигналы с различными задержками от бортового микроконтроллера морского микродрона. Программным способом можно формировать различные задержки, позволяющие осуществить прием и передачу гидроакустических сигналов в выбранном направлении.
На фиг. 3 приведена схема пеленгации надводного судна 3 или подводной лодки 4 при помощи «стаи» морских микродронов. Управляющий командный микродрон 1 имеет информацию о координатах всех микродронов 2 «стаи». Для обнаружения пеленгуемого объекта 3 каждый микродрон 2 получает необходимую информацию о том, в каком направлении, с какой частотой, с какой фазой, и с какой амплитудой послать гидроакустический сигнал. Уровень сигнала ЦАФАР каждого микродрона задается меньше уровня гидроакустических природных помех. Таким образом, пеленгуемый объект 3 не способен обнаружить момент его сканирования для принятия мер противодействия. В то же время управляющий командный микродрон 1 просуммирует все сигналы от микродронов 2 «стаи» и полезный сигнал от пеленгуемого объекта 3 окажется больше по уровню, чем гидроакустические природные помехи. Возможен режим, при котором суммарный гидроакустический сигнал всех микродронов 2 «стаи» будет нулевым за счет заданной интерференции, а это позволит также надежно провести пеленгацию объекта 3, причем сам объект в этом случае, практически не сможет обнаружить сам факт, что его запеленговали.
Программно-управляемая гидроакустическая ЦАФАР на базе «стаи» морских микродронов позволяет с высокой достоверностью и надежностью осуществить скрытную пеленгацию подводных и надводных объектов.
Литература
1. Цифровая активная фазированная антенная решетка: патент №2617457.
Программно-управляемая гидроакустическая ЦАФАР на базе "стаи" морских микродронов реализована в форме распределенных компонентов единой системы, отличающаяся тем, что каждый микродрон, управляемый бортовым микроконтроллером, в строго определенные моменты времени выдает или принимает импульсные сигналы при помощи магнитогидродинамического излучателя гидроакустических колебаний, причем моменты передачи или приема для каждого микродрона в зависимости от его подводных координат индивидуально подбираются управляющим командным микродроном таким образом, что только в определенной точке сканируемого пространства сигналы будут синхронизированы для пеленгации объекта, причем уровень облучающих сигналов будет меньше уровня природных акустических помех и не позволит провести обнаружение как самого факта пеленгации, так и местоположения микродронов.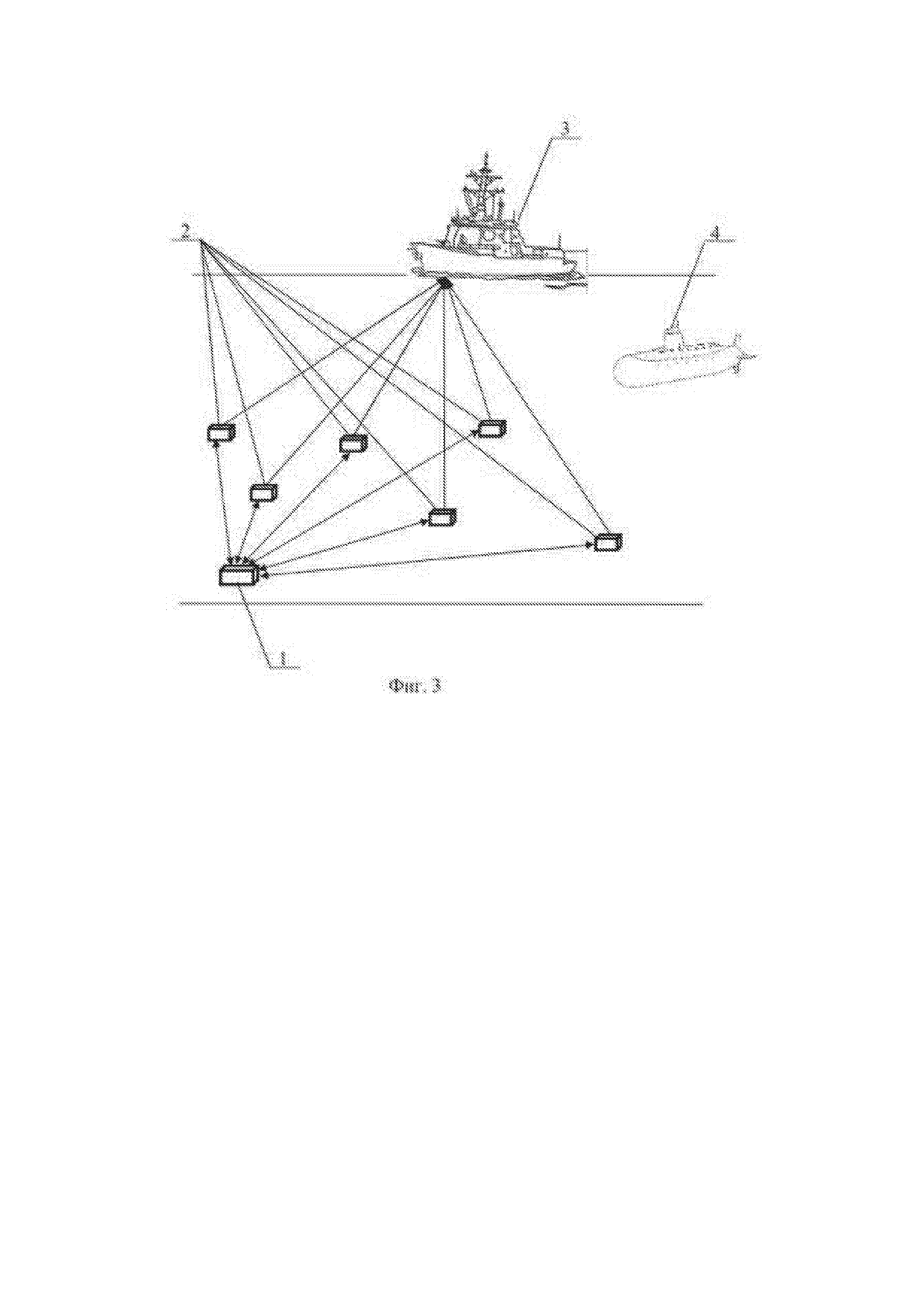
Магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов
Магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов
Способ формирования металлических порошков для аддитивных технологий в плазмотронной установке под воздействием ультразвука
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Термоэлектрическое устройство для отвода теплоты от элементов рэа
Каскадное светоизлучающее термоэлектрическое устройство
Светотранзистор с высоким быстродействием
Тепловая труба с применением трубчатых оптоволоконных структур
Энергоэффективное охлаждающее устройство
Способ отвода тепла от тепловыделяющих электронных компонентов в виде электромагнитной энергии на основе диодов ганна
Способ отвода тепла от тепловыделяющих электронных компонентов на основе применения полупроводниковых лазеров
Светотиристор
Способ отвода тепла от тепловыделяющих электронных компонентов в виде электромагнитной энергии на основе туннельных диодов
Устройство охлаждения на основе нанопленочных термомодулей
Термоэлектрический генератор с высоким градиентом температур между спаями

