Результат интеллектуальной деятельности: Система управления устройствами закрепления железнодорожного подвижного состава
Вид РИД
Изобретение
Изобретение относится к области железнодорожного транспорта, а именно к устройствам дистанционного управления устройствами закрепления подвижного состава на станционных приемоотправочных путях.
Заявляемая система управления устройствами закрепления может использоваться для автоматизации процессов, связанных с остановкой и закреплением остановленного на железнодорожном пути подвижного состава во избежание его самопроизвольного движения после отцепки локомотива.
Заявляемая система управления устройствами закрепления железнодорожного подвижного состава предназначена для автоматизации операций, выполняемых сигналистами на приемоотправочных путях, оснащенных механизированными устройствами закрепления железнодорожного подвижного состава, к которым относятся любые стационарные устройства с электрическим, пневматическим или гидравлическим приводом, предназначенные для закрепления подвижного состава на железнодорожном пути станции во избежание его самопроизвольного движения после отцепки локомотива.
Известна система автоматизированного закрепления поезда, содержащая связанные с пультом управления на посту ДСП через единый контроллер подсистему связи с колонкой местного управления, установленной вблизи зоны закрепления, диагностическим устройством отображения и пультом управления, расположенными на посту дежурного по станции (ДСП), подсистему управления устройствами закрепления, подсистему прицельной остановки поезда, сопряженную с устройствами электрической централизации, а также подсистему электропитания. Подсистема прицельной остановки поезда снабжена пунктом определения колесной пары и пунктами определения длины состава, содержащими пункты счета осей, путевыми ретрансляторами сигналов и устройствами отображения, при этом расчет длины принимаемого поезда производится на основе
определения межосевых расстояний (патент RU №2598919, опубликовано 10.10.2016). Данная система выбрана за прототип.
Недостатками прототипа являются недостаточная надежность работы системы, значительное количество оборудования, необходимое для ее реализации, и большие временные затраты для остановки и закрепления поезда.
Определение длины поезда и закрепляемой колесной пары непосредственно в зоне устройств закрепления на основе информации только от пунктов счета осей приводит к недостаточной надежности и точности выполнения операции автоматизированной остановки поезда и, как следствие, к необходимости выполнения трудоемких операций по коррекции положения поезда с привлечением сигналиста. Кроме того, в прототипе не предусмотрены средства для предварительного определения расстояния от головы поезда (первой колесной пары поезда) до закрепляемой колесной пары. Это требует движения поезда по станционным путям с минимальной скоростью на большом расстоянии, что приводит к увеличению времени выполнения технологических операций по остановке и закреплению поезда. А при наличии в середине состава дополнительного локомотива и/или в конце состава подталкивающего локомотива, закрепление состава поезда без корректирующих команд сигналиста или помощника машиниста становится невозможным. При этом сигналист (или помощник машиниста) при подаче корректирующих команд должен находиться на расстоянии прямой видимости от устройств закрепления поезда, что ведет к повышенной опасности выполнения технологических операций по закреплению поезда.
Техническим результатом, на который направлено заявляемое изобретение, является упрощение системы, повышение надежности ее работы, повышение уровня автоматизации и безопасности технологического процесса закрепления поезда.
Технический результат достигается тем, что система управления устройствами закрепления железнодорожного подвижного состава, содержит устройства закрепления, подключенные к подсистеме управления устройствами закрепления, которая связана с пультом местного управления, расположенным вблизи устройств закрепления, и через, по меньшей мере, один контроллер подсистемы прицельной остановки с пультом управления, расположенным на посту ДСП, при этом в подсистему прицельной остановки входят датчики регистрации прохода колеса и устройства передачи данных на локомотив, подключенные к
контроллеру, согласно изобретению в подсистему прицельной остановки поезда дополнительно включены подключенные к соответствующим входам контроллера средства для идентификации типов подвижных единиц поезда, пункт регистрации входа поезда в зону прицельной остановки, пункт регистрации колеса в зоне закрепления и пункт дистанционного контроля положения закрепляемой колесной пары в зоне устройств закрепления, при этом в память контроллера внесена база данных типов подвижных железнодорожных единиц с указанием для каждого типа подвижной единицы, по меньшей мере, принадлежности к вагону или локомотиву, количества колесных пар и ее межосевых расстояний.
Средства для идентификации типов подвижных единиц поезда содержат, по меньшей мере, два датчика регистрации прохода колеса, расположенные друг от друга на расстоянии меньшем минимально возможного межосевого расстояния колесных пар всех существующих подвижных железнодорожных единиц.
В качестве средства для идентификации типов подвижных единиц поезда используют устройство считывания информации с идентификаторов подвижных единиц, закрепленных на корпусе каждой подвижной единицы, при этом в базу данных типов подвижных железнодорожных единиц дополнительно занесена информация идентификаторов о типах подвижных единиц, данные о расстояниях от осей крайних колесных пар до осей автосцепок и расстояний между осями автосцепок соответствующих типов подвижных единиц.
Для идентификации типов подвижных единиц поезда используют данные телеграммы-натурного листа и соответствующие средства для ее формирования, передачи и приема.
Пункт регистрации входа поезда в зону прицельной остановки содержит, по меньшей мере, один датчик регистрации прохода колеса.
Пункт регистрации колеса в зоне закрепления содержит, по меньшей мере, два датчика регистрации прохода колеса, расположенных на небольшом расстоянии друг от друга.
Устройства передачи данных на локомотив содержат путевые устройства отображения, связанные с контроллером и установленные вдоль каждого станционного пути с механизированными устройствами закрепления для приема состава поезда.
Устройства передачи данных на локомотив содержат путевые устройства системы автоматического управления тормозами.
Устройства передачи данных на локомотив снабжены радиоканалом для передачи информации машинисту об оставшемся расстоянии до остановки локомотива.
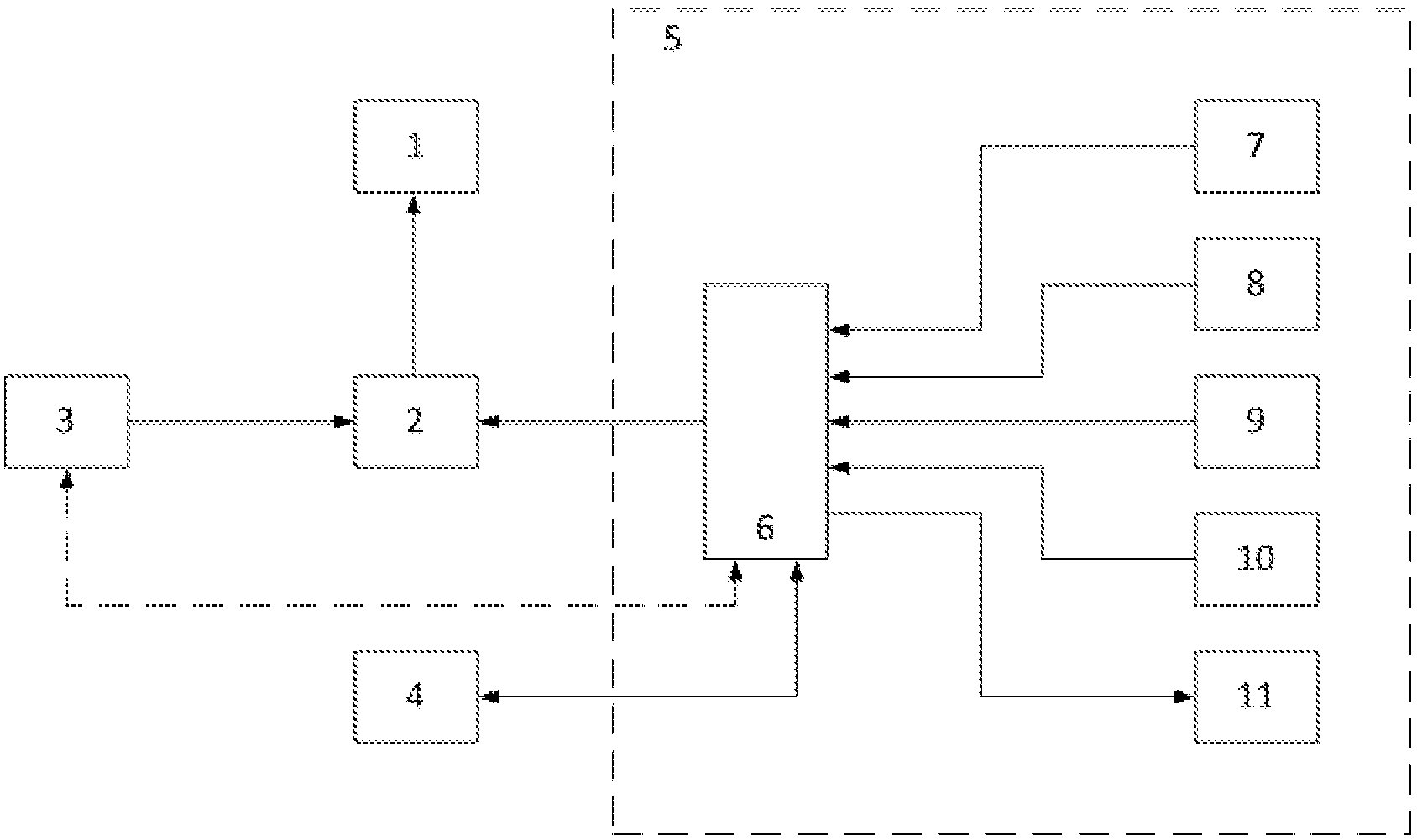
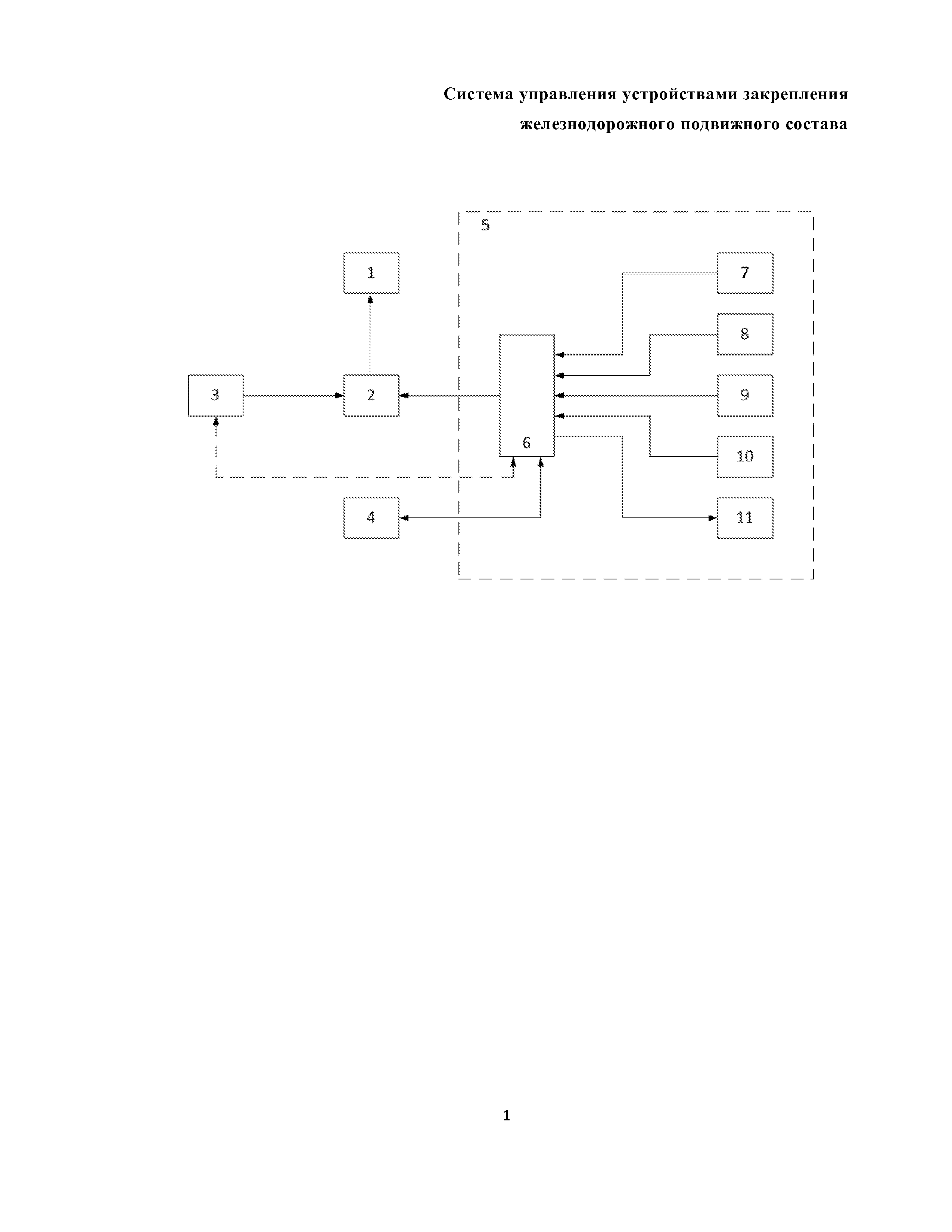
Заявляемое изобретение поясняется чертежом, где на фиг. представлена структурная схема системы управления устройствами закрепления железнодорожного подвижного состава.
Система управления устройствами закрепления подвижного состава содержит устройства 1 закрепления железнодорожного подвижного состава, подключенные к подсистеме 2 управления устройствами закрепления, которая, в свою очередь, связана с пультом 3 местного управления, расположенным вблизи устройств 1 закрепления, пульт 4 управления, расположенный на посту ДСП, и подсистему 5 прицельной остановки поезда.
Подсистема 2 управления устройствами закрепления связана с пультом 4 управления через, по меньшей мере, один контроллер 6 подсистемы 5 прицельной остановки.
Подсистема 5 прицельной остановки поезда содержит подключенные к контроллеру 6 пункт 7 регистрации колеса в зоне закрепления с соответствующими средствами связи и передачи данных в контроллер (на чертеже не показаны), пункт 8 дистанционного (прямого или опосредованного) контроля положения закрепляемой колесной пары в зоне устройств закрепления, средства 9 для идентификации типов подвижных единиц поезда с соответствующими устройствами передачи данных в контроллер (на чертеже не показаны), пункт 10 регистрации входа поезда в зону прицельной остановки и устройства 11 для передачи данных на локомотив. В качестве идентификаторов подвижных единиц поезда использованы кодовые бортовые датчики, выполненные в виде RFID-меток (на чертеже не показаны).
Подсистема 5 прицельной остановки поезда предназначена для обеспечения машиниста поезда и/или локомотивных устройств безопасности данными, в соответствии с которыми машинист и/или локомотивные устройства безопасности (если остановка поезда производится в автоматическом режиме) могут осуществить торможение и остановку поезда таким образом, чтобы колесная пара, посредством которой производится закрепление состава поезда на станционном пути (целевая колесная пара), оказалась в зоне действия устройств закрепления поезда.
Пункт 7 регистрации колеса в зоне закрепления содержит, по меньшей мере, два датчика регистрации прохода колеса, расположенных на небольшом расстоянии друг от друга в сторону уклона пути на расстоянии 1360 мм (минимально возможное межосевое расстояние в тележках существующего парка вагонов) от устройств закрепления.
Пункт 8 дистанционного (прямого или опосредованного) контроля положения закрепляемой колесной пары в зоне устройств закрепления снабжен, например, видеокамерой или дополнительными датчиками присутствия колеса в зоне действия устройств закрепления, данные с которых по радиоканалу и/или по кабельной линии передаются на пост ДСП и/или на локомотив (отображаются на пульте управления 4 ДСП и/или в кабине локомотива поезда).
Средства 9 для идентификации типов подвижных единиц поезда, необходимые для построения (формирования) информационной модели поезда по первому варианту реализации, содержат, по меньшей мере, два датчика регистрации прохода колеса, расположенные на небольшом расстоянии друг от друга, значение которого меньше минимально возможного межосевого расстояния. Предпочтительно датчики средств 9 устанавливать на расстоянии от пункта 10 регистрации входа поезда в зону прицельной остановки не менее максимально возможной длины принимаемых на данной станции поездов.
По второму варианту реализации средства 9 для идентификации типов проходящих подвижных единиц поезда содержат, по меньшей мере, один считыватель идентификаторов подвижных единиц поезда, предпочтительно размещенный на подъездных путях к станции на расстоянии не менее максимально возможной длины принимаемых на данной станции поездов от пункта 10, или сразу после входных светофоров станции. В этом варианте реализации средства 9 для идентификации типов подвижных единиц поезда в контроллер 6 системы заносится база данных существующих типов железнодорожных подвижных единиц - локомотивы и вагоны - с указанием количества колесных пар каждого типа подвижной единицы (трех, четырех, шести, восьми или двенадцатиосный вагон или локомотив), данных о межосевых расстояниях колесных пар, о расстояниях от осей крайних колесных пар до осей автосцепок и о расстояниях между осями автосцепок соответствующего типа подвижной единицы.
Для удобства обслуживания средства 9 для идентификации типов проходящих подвижных единиц в составе поезда по обоим вариантам исполнения в данной системе могут быть размещены в горловинах станций, расположенных с противоположных сторон перегонов, которые прилегают к станции с устройствами автоматизированного закрепления состава поезда.
Также вместо средств 9 и/или одновременно с ними могут быть использованы данные телеграммы-натурного листа и соответствующие средства для ее формирования, передачи и приема.
Пункт 10 регистрации входа поезда в зону прицельной остановки содержит, по меньшей мере, один датчик регистрации прохода колеса, связанный с контроллером 6 (или любое другое устройство для этих же целей). В качестве выходного сигнала пункта 10 регистрации входа поезда в зону прицельной остановки может быть использован один из сигналов занятости станционного пути, на который прибывает состав, подлежащий закреплению, например сигнал занятости соответствующей рельсовой цепи, или выход счетного пункта, контролирующего занятость любого другого соответствующего участка станционного пути или стрелки данной станции. После пункта 10 регистрации входа поезда в зону прицельной остановки могут размещаться напольные устройства САУТ. С целью экономии оборудования предпочтительно пункт 10 разместить в горловине станции после входного светофора до первой входной стрелки станции.
Устройства 11 для передачи данных на локомотив предназначены для обеспечения машиниста поезда и/или локомотивных устройств безопасности данными, в соответствии с которыми машинист и/или локомотивные устройства безопасности (если торможение и остановка поезда производится в автоматическом режиме) могут осуществить торможение и остановку поезда таким образом, чтобы колесная пара, посредством которой будет закрепляться поезд (целевая колесная пара), оказалась в зоне действия устройств закрепления поезда. Устройства 11 могут быть снабжены радиоканалом (радиомодемом) и/или напольными устройствами САУТ для передачи данных в локомотивные устройства безопасности (типа БЛОК, КЛУБ, САУТ или др.) и/или средствами передачи информации машинисту по радиоканалу и/или напольными и/или локомотивными устройствами отображения информации (на чертеже не показаны). Напольные устройства САУТ размещают вдоль станционных путей, где установлены механизированные устройства закрепления на некотором расстоянии друг от друга.
В алгоритме работы контроллера принято, что колесная пара, за которую должно производиться закрепление поезда (целевая колесная пара), - это наиболее удаленная от нижней точки уклона колесная пара первого (по счету со стороны нижней точки уклона) вагона поезда. При наличии в конце или в середине поезда дополнительных действующих локомотивов, первым вагоном от нижней точки уклона может быть первый вагон после любого обнаруженного дополнительного локомотива в составе поезда.
Система управления устройствами закрепления подвижного состава работает следующим образом.
Рассмотрим случай, когда в средствах 9 для идентификации типов подвижных единиц поезда используется два датчика регистрации прохода колеса.
Для приема поезда на станцию для закрепления состава ДСП установленным порядком задает маршрут приема поезда на соответствующий путь и предупреждает машиниста прибывающего поезда о том, что путь приема оборудован устройствами автоматизированного управления устройствами закрепления. Также ДСП сообщает машинисту о возможности торможения и остановки поезда в автоматическом режиме, если станционные пути оборудованы напольными устройствам САУТ или другими соответствующими радиотехническими средствами устройств 11 для передачи данных в локомотивные устройства безопасности (БЛОК, КЛУБ, САУТ или др.). После замыкания маршрута контактами реле контроля замыкания пути в поездном маршруте в контроллер 6 передается управляющая команда на активацию датчиков регистрации прохода колеса (пунктов счета осей), расположенных в пункте 7 регистрации колеса в зоне закрепления станционного пути, на который принимается поезд, в средствах 9 для идентификации типов подвижных единиц поезда и в пункте 10 регистрации входа поезда в зону прицельной остановки. Одновременно активируются устройства 11 для передачи данных на локомотив, соответствующие станционному пути, на который принимается поезд, и запускается алгоритм приема поезда.
При проходе первой колесной пары поезда над датчиками регистрации прохода колеса, расположенными в устройстве 9, в контроллере запускается алгоритм учета числа прошедших колесных пар и производится расчет их межосевых расстояний в соответствии, например, со следующей методикой. Датчики регистрации прохода колеса в средствах 9 располагают друг от друга на заданном фиксированном расстоянии, величина которого меньше минимально возможного межосевого расстояния колесных пар. При проходе над этими датчиками первой колесной пары (каждой подвижной единицы) фиксируют моменты появления сигналов на выходе одного и другого датчика, и с учетом известного расстояния между ними определяют скорость движения соответствующей колесной пары. Затем фиксируют моменты появления сигналов на выходе этих же датчиков от следующей колесной пары. По разнице моментов прохождения этих датчиков соответственно первой и второй (последующими) колесными парами и ранее определенной скоростью их прохождения определяют расстояние между соответствующими колесными парами. По мере прохода над этими датчиками каждой последующей колесной пары поезда в контроллере 6 в режиме реального времени происходит сравнение прошедшего количества колесных пар и их межосевых расстояний с данными о типах подвижных
единиц, которые хранятся в базе данных контроллера 6. При совпадении, с заданной степенью точности, с данными, хранимыми в контроллере, определяется тип подвижной единицы, которая прошла над датчиками (локомотив или вагон), и в соответствии с этими же данными определяется расстояние между осями автосцепок этой подвижной единицы и между осями автосцепок и осями крайних колесных пар этой подвижной единицы. Затем запускается алгоритм определения следующей подвижной единицы в составе поезда. Таким образом, в контроллере в режиме реального времени формируется информационная модель принимаемого на станцию поезда с обозначением от головы поезда порядкового номера и типа соответствующей подвижной единицы (локомотив или вагон), количества ее колесных пар, ее межосевых расстояний колесных пар, расстояний от осей крайних колес до осей автосцепок и расстояния между осями автосцепок всех единиц поезда. Одновременно в контроллере с учетом уклона пути, на который принимается поезд, определяется порядковый номер N целевой колесной пары относительно первой колесной пары поезда и расстояние от оси первой колесной пары поезда до оси целевой колесной пары. Для повышения эксплуатационной готовности предлагаемой системы управления устройствами закрепления в качестве самостоятельного средства и/или вместо средств 9 для построения информационной модели принимаемого на станцию поезда, а также для определения порядкового номера N целевой колесной пары относительно первой колесной пары поезда и определения расстояния от оси первой колесной пары поезда до оси целевой колесной пары в предлагаемой системе управления устройствами закрепления могут быть использованы данные телеграммы-натурного листа поезда (форма ДУ-1) и соответствующие средства для ее формирования, передачи и приема, которые предварительно (до выхода закрепляемого состава с прилегающих соседних станций) заносятся в контроллер 6 в установленном порядке [1].
При проходе первой колесной парой принимаемого поезда датчика регистрации прохода колеса, расположенного в пункте 10 регистрации входа поезда в зону прицельной остановки, т.е. при вступлении поезда в зону прицельной остановки, контроллер 6 фиксирует расстояние от целевой колесной пары до устройств закрепления и посредством устройств 11 передает на локомотив машинисту и/или в устройства безопасности БЛОК, КЛУБ, САУТ или др. При проходе этого же датчика последующими колесными парами поезда контроллер 6 в режиме реального времени уточняет это расстояние и посредством устройств 11 передает эти данные на локомотив на соответствующие путевые устройства отображения. Руководствуясь этими данными, машинист осуществляет торможение и остановку поезда в ручном
режиме, а локомотивные устройства безопасности могут осуществить торможение и остановку поезда в автоматическом режиме в соответствии с фактической скоростью движения поезда и кривыми торможения, которые занесены в локомотивные устройства безопасности.
При вступлении второй колесной пары принимаемого поезда на первый датчик регистрации прохода колеса, расположенный в пункте 7, контроллер 6 начинает определять расстояние от целевой колесной пары до устройств закрепления в режиме реального времени по данным датчиков регистрации прохода колеса, расположенным в пункте 7, с учетом реального текущего времени, момента (или времени) прохождения предшествующей последней учтенной колесной парой этих датчиков и скорости прохождения последней учтенной колесной пары над этими датчиками. Расстояние от целевой колесной пары до устройств закрепления, определенное таким способом, по мере уменьшения количества колесных пар от устройств закрепления до целевой колесной пары каждый раз уточняется (и таким образом, при прохождении последней колесной пары, предшествующей закрепляемой колесной паре, может иметь точность до нескольких сантиметров) и с заранее заданной периодичностью обновляется контроллером 6 на устройствах отображения устройств 11. Машинист в соответствии с этими данными производит торможение и остановку поезда. Одновременно в контроллере 6 в режиме реального времени проводится сравнение количества прошедших колесных пар над первым и вторым датчиками регистрации прохода колеса, расположенными в пункте 7 с порядковым номером N целевой колесной пары относительно первой колесной пары поезда. Когда количество прошедших колесных пар над этими датчиками станет соответствовать значениям N и N+1, либо  и
и  (в зависимости от направления движения поезда), контроллер 6 на устройства отображения устройств 11 выводит значение информация «ООО». Это соответствует расположению целевой колесной пары в зоне устройств закрепления колеса, а колесной пары, предшествующей целевой колесной паре, - между первым и вторым датчиками регистрации прохода колеса, расположенными в пункте 7.
(в зависимости от направления движения поезда), контроллер 6 на устройства отображения устройств 11 выводит значение информация «ООО». Это соответствует расположению целевой колесной пары в зоне устройств закрепления колеса, а колесной пары, предшествующей целевой колесной паре, - между первым и вторым датчиками регистрации прохода колеса, расположенными в пункте 7.
После остановки поезда ДСП средствами пункта 8 дистанционного (прямого или опосредованного) контроля положения закрепляемой колесной пары в зоне устройств закрепления контролирует наличие целевой колесной пары в зоне действия устройств закрепления. В случае расположения целевой колесной пары в зоне действия устройств 1 закрепления, ДСП, убедившись по показаниям на пульте управления ДСП 4 об
исправности и готовности всех устройств к закреплению, дает команду на приведение в действие устройств закрепления состава поезда.
В случае неточной остановки поезда, ДСП осуществляет передачу локомотивной бригаде закрепляемого поезда приказа, требующего произвести коррекцию текущей позиции остановившегося поезда с указанием направления движения в процессе коррекции.
При проведении технического обслуживания или при аварийных ситуациях управление устройствами 1 закрепления поезда в соответствии с известными техническими решениями [2] передается на маневровую колонку 3. Контроллер 6 осуществляет передачу устройствам электрической или микропроцессорной централизации данных о текущем положении (верхнее, нижнее или промежуточное) устройств 1 закрепления подвижного состава любого станционного пути, а также данные о том, на каких приемоотправочных путях тормозные упоры переданы на местное управление.
При использовании в средствах 9 считывателя данных с идентификаторов подвижных единиц поезда система работает следующим образом.
Для приема поезда на станцию для закрепления состава ДСП установленным порядком задает маршрут приема поезда на соответствующий путь и предупреждает машиниста прибывающего поезда о том, что путь приема оборудован устройствами автоматизированного управления устройствами закрепления. Также ДСП сообщает машинисту о возможности торможения и остановки поезда в автоматическом режиме, если станционные пути оборудованы напольными устройствами САУТ или другими соответствующими радиотехническими средствами устройств 11 для передачи данных в локомотивные устройства безопасности (типа БЛОК, КЛУБ, САУТ или др.).
После замыкания маршрута контактами реле контроля замыкания пути в поездном маршруте в контроллер 6 передается управляющая команда на активацию датчиков регистрации прохода колеса (пунктов счета осей), расположенных в пункте 7 регистрации колеса в зоне закрепления станционного пути, на который принимается поезд, и в пункте 10 регистрации входа поезда в зону прицельной остановки. В средствах 9 для идентификации типов подвижных единиц поезда активируется считыватель идентификаторов подвижных единиц поезда. Одновременно активируются устройства 11 для передачи данных на локомотив, соответствующие станционному пути, на который принимается поезд, и запускается алгоритм приема поезда.
При проходе идентификатора (первой RFID-метки) первой подвижной единицы поезда мимо пункта считывания идентификаторов подвижных единиц поезда, в контроллер 6 передаются данные о типе этой подвижной единицы - локомотив или вагон, и данные о ее технических характеристиках (если локомотив, то в RFID-метке обозначен тип локомотива, по которому определяются необходимые параметры). По данным, считанным из идентификаторов подвижных единиц поезда в соответствии с данными, хранимыми в контроллере, определяются количество колесных пар соответствующей подвижной единицы, расстояния между осями автосцепок этой подвижной единицы и между осями автосцепок и осями крайних колесных пар этой подвижной единицы. Затем запускается алгоритм определения аналогичных параметров следующей подвижной единицы в составе поезда. Таким образом, в контроллере в режиме реального времени, как и в первом варианте реализации средств 9 для идентификации подвижных единиц поезда, формируется информационная модель принимаемого на станцию поезда с обозначением от головы поезда порядкового номера и типа соответствующей подвижной единицы (локомотив или вагон), количества ее колесных пар, межосевых расстояний колесных пар, расстояний от осей крайних колес до осей автосцепок и значения расстояния между осями автосцепок всех единиц поезда. Одновременно в контроллере с учетом уклона пути, на который принимается поезд, в режиме реального времени определяется порядковый номер N целевой колесной пары относительно первой колесной пары поезда и точное расстояние от оси первой колесной пары поезда до оси целевой колесной пары.
Как и в первом варианте реализации средств 9 для повышения эксплуатационной готовности предлагаемой системы управления устройствами закрепления в качестве самостоятельного средства и/или вместо средств 9 для построения информационной модели принимаемого на станцию поезда, а также для определения порядкового номера N целевой колесной пары относительно первой колесной пары поезда и определения расстояния от оси первой колесной пары поезда до оси целевой колесной пары, в предлагаемой системе управления устройствами закрепления также могут быть использованы данные телеграммы-натурного листа поезда (форма ДУ-1) и соответствующие средства для ее формирования, передачи и приема, которые в автоматическом режиме предварительно (до выхода закрепляемого состава с прилегающих соседних станций) заносятся в контроллер 6 в установленном порядке [1].
Далее система управления устройствами закрепления поезда работает так же, как было описано в первом случае.
В прототипе для оборудования станций на каждом станционном пути, оборудованном устройствами закрепления, согласно описания требуется 10 пунктов счета осей (датчиков регистрации прохода колеса). Предлагаемая система управления устройствами закрепления поезда требует два датчика регистрации прохода колеса (пункта счета осей) на каждом станционном пути, оборудованном устройствами закрепления, и по одному датчику регистрации прохода колеса в горловинах станции. По одному из вариантов реализации изобретения средства для идентификации содержат два датчика регистрации прохода колеса, по другому варианту реализации средства для идентификации подвижных единиц - один пункт считывания идентификаторов подвижных железнодорожных единиц с каждой стороны станции.
В минимальном варианте реализации специальные средства 9 для идентификации типов проходящих подвижных единиц в предлагаемой системе вообще могут отсутствовать. Построение информационной модели принимаемого на станцию поезда, а также определение порядкового номера N целевой колесной пары относительно первой колесной пары поезда и определения расстояния от оси первой колесной пары поезда до оси целевой колесной пары в предлагаемой системе управления устройствами закрепления могут осуществляться на основе использования данных телеграммы-натурного листа поезда (форма ДУ-1) и соответствующих средств для ее формирования, передачи и приема, которые в автоматическом режиме могут заноситься в контроллер 6 в установленном порядке [1].
В целом для оборудования станции предлагаемой системой управления устройствами закрепления поезда требуется меньше оборудования, а, следовательно, и надежность ее работы выше. Причем, предлагаемая система обеспечивает торможение и остановку поезда с большей точностью за более короткое время, в том числе и в автоматическом режиме.
Преимуществом изобретения является также принципиальная возможность в режиме реального времени корректировать точку оптимальной остановки поезда относительно устройств закрепления, в зависимости от определенного ранее типа закрепляемого вагона и расстояния от закрепляемой колесной пары до соседней колесной пары в тележке закрепляемого вагона. Это позволяет повысить надежность работы системы, и упростить конструкцию и материалоемкость закрепляющих устройств. Для этого в пункте 7 регистрации колеса в зоне закрепления необходимо на небольшом расстоянии друг от друга разместить не два, а несколько датчиков регистрации прохода колеса и связать их с контроллером 6.
Известно, что расстояние между колесными парами в тележках у большинства вагонов на 490 мм больше минимально возможного расстояния (1360 мм). Поэтому установка датчиков регистрации прохода колеса в пункте 7 на расстоянии 1360 мм от устройств закрепления для большинства типов закрепляемых вагонов является неоптимальной. Если в алгоритме работы контроллера, наряду с анализом номера целевой колесной пары, дополнительно включить анализ расстояния закрепляемой колесной пары от соседней колесной пары в сторону уклона, и в соответствии с выявленным расстоянием для определения факта вхождения закрепляемой колесной пары в зону закрепления проводить анализ информации со всех датчиков регистрации прохода колеса, установленных в пункте 7, область отклонений целевой колесной пары относительно устройств закрепления при остановке поезда может быть уменьшена на 490 мм относительно варианта использования в пункте 7 только двух датчиков. Следовательно, и надежность работы системы соответственно будет увеличена.
Таким образом, предлагаемая система управления устройствами закрепления поезда проще и надежнее, чем в прототипе. А автоматизированные и автоматические режимы торможения и остановки поезда, реализуемые в данной системе, повышают производительность и уровень безопасности технологического процесса закрепления поезда.
Литература
1. Указания о содержании, порядке подготовки и передачи телеграммы-натурного листа грузового поезда. /Приложение 3/ Инструкция по составлению натурного листа поезда (утверждена в г. Киеве 12.02.2003 на 34-ом заседании Совета по железнодорожному транспорту СНГ) / Электронный ресурс http://old.lawru.info/legal2/se6/pravo6055/page3.htm. Текст документа по состоянию на 1 марта 2008 года (дата обращения 07.12.2017 г.)
2. Патент RU №2598919, опубликован 10.10.2016.
Способ управления движением поездов на перегоне при диспетчерской централизации
Устройство для определения расстояния между локомотивом и объектом, расположенным на маршруте следования локомотива
Способ повышения устойчивости работы датчика регистрации прохода колеса к воздействию температуры окружающей среды и бросков тягового тока и соответствующий датчик регистрации прохода колеса
Способ повышения устойчивости работы датчика регистрации прохода колеса к воздействию температуры окружающей среды
Система микропроцессорной централизации стрелок и сигналов мпц-и
Устройство электронного гистерезиса
Устройство электронного гистерезиса
Устройство электронного гистерезиса
Устройство управления переездной сигнализацией
Способ контроля состояния рельсовой линии
Устройство управления переездной сигнализацией
Устройство управления переездной сигнализацией
Устройство управления переездной сигнализацией
Способ управления переездной сигнализацией
Безопасный логический элемент "и"

