Результат интеллектуальной деятельности: Способ определения класса шумящей цели и дистанции до неё
Вид РИД
Изобретение
Изобретение относится к области гидроакустики, а именно к пассивным шумопеленгаторным станциям (ШПС), предназначенным для обнаружения подводных лодок и надводных кораблей по их шумоизлучению.
Наиболее сложными задачами, решаемыми такими ШПС, являются классификация обнаруженного объекта и определение дистанции до него.
Методы классификации и определения дистанции шумящих объектов приведены в работах [1-11]. Недостатком большинства известных методов являются дополнительные требования, предъявляемые ими к конструкции ШПС (например, разнесенный прием шумовых сигналов [6, 11]) либо к обработке принимаемого шумового сигнала (например, спектрально-корреляционный анализ [4, 5, 9]). В ряде случаев выполнение этих дополнительных требований затруднительно.
В качестве прототипа выберем способ классификации и определения дистанции обнаруженной шумящей цели, описанный в [12]. Он включает: формирование пеленгационного рельефа на выходе горизонтального веера характеристик направленности (ХН) приемной гидроакустической антенны (фиг. 1); обнаружение в пеленгационном рельефе методом двухстороннего контраста отметки цели; прослушивание оператором сигнала с выхода ХН, ось которой совпадает с максимумом отметки цели; принятие оператором по результатам прослушивания сигнала решения о классе цели и дистанции до нее.
Достоинством данного способа является его простота, а недостатком - невысокая эффективность (точность) классификации цели и определения дистанции, особенно при малых отношениях сигнал/помеха, при которых человеческий слух плохо улавливает особенности сигнала, присущие тому или иному объекту.
Решаемая техническая проблема - повышение эффективности использования ШПС.
Достигаемый технический результат - повышение достоверности классификации и точности определения дистанции до обнаруженной шумящей цели.
Указанный технический результат достигается тем, что с использованием пеленгационного рельефа измеряют уровень сигнала  и скорость изменения пеленга отметки обнаруженной цели
и скорость изменения пеленга отметки обнаруженной цели  (последняя в кораблевождении называется величиной изменения пеленга или сокращенно ВИП [1]), и на основании полученных результатов принимают решение о классе и дистанции до цели.
(последняя в кораблевождении называется величиной изменения пеленга или сокращенно ВИП [1]), и на основании полученных результатов принимают решение о классе и дистанции до цели.
Рассмотрим эффективность данного технического решения применительно к классификации обнаруженной шумящей цели на классы "подводная лодка" и "надводный корабль" и определения дистанции до нее.
Известно [12-14], что шумности надводных кораблей значительно (в среднем на 40 дБ) превышают шумности подводных лодок, ввиду чего один и тот же уровень сигнала на выходе приемного тракта ШПС соответствует существенно различающимся дистанциям в случае обнаружения надводного корабля и подводной лодки. А поскольку ВИП цели при увеличении дистанции до нее в среднем уменьшается, то по величине ВИП можно судить о дистанции до цели, а, следовательно и о ее классе.
Однако, поскольку на величину ВИП, кроме дистанции до цели влияют такие ее курс и скорость, которые на практике неизвестны, то определение правила (порогов) принятия решения о классе и дистанции цели по измеренным значениям уровня сигнала и ВИП можно осуществить только на вероятностном уровне [15-17]. Для этого предлагается построить условную (в зависимости от класса цели ω и дистанции R до нее) плотность распределения вероятностей (ПРВ)  оценок уровня сигнала
оценок уровня сигнала  и ВИП цели
и ВИП цели  . Тогда при подстановке в эту условную ПРВ вместо неслучайных аргументов
. Тогда при подстановке в эту условную ПРВ вместо неслучайных аргументов  (уровень сигнала) и
(уровень сигнала) и  (ВИП цели) оценок
(ВИП цели) оценок  и
и  , она превращается в функцию правдоподобия (ФП), зависящую только от класса цели ω и дистанции R до нее. Координаты максимума этой ФП соответствуют оптимальным значениям класса цели и дистанции до нее, т.е. являются решением рассматриваемой задачи.
, она превращается в функцию правдоподобия (ФП), зависящую только от класса цели ω и дистанции R до нее. Координаты максимума этой ФП соответствуют оптимальным значениям класса цели и дистанции до нее, т.е. являются решением рассматриваемой задачи.
В основе построения условной ПРВ  лежат стохастические модели оценок уровня сигнала
лежат стохастические модели оценок уровня сигнала  и ВИП цели
и ВИП цели  , зависящие от класса цели и дистанции до нее.
, зависящие от класса цели и дистанции до нее.
Стохастическая модель оценки уровня сигнала имеет вид [13]:

где
-  - оценка уровня сигнала цели на выходе приемного тракта ШПС в зависимости от класса ω, скорости Vω и дистанции R цели, дБ;
- оценка уровня сигнала цели на выходе приемного тракта ШПС в зависимости от класса ω, скорости Vω и дистанции R цели, дБ;
- ƒH, ƒB - нижняя и верхняя границы рабочего диапазона частот (РДЧ) ШПС, Гц;
- Sω(ƒ, Vω, R) - энергетический спектр на входе приемной антенны ШП сигнала цели класса ω, находящейся на расстоянии R от антенны и движущейся со скоростью V, Па2/Гц, определяемый по формуле [13]:

где
- Р0/ω(Vω) - давление шума цели класса ω, движущейся со скоростью V, приведенное к расстоянию 1 м от нее, частоте 1 кГц и полосе 1 Гц, называемое приведенной шумностью цели [12], Па/√Гц (далее - прив. ш. цели);
- ƒ - частота, кГц;
- β(ƒ) - коэффициент пространственного затухания, дБ/км, вычисляемый по формуле [13]:

- a, b, c - коэффициенты, зависящие от района Мирового океана;
- А(ƒ, R) - аномалия (по мощности) распространения сигнала частоты ƒ на расстояние R, которое рассчитывается для текущих гидроакустических условий по специальной программе (далее - аномалия);
- γ(ƒ) ~ передаточная характеристика приемного тракта на частоте ƒ, В/Па;
- ΔU - ошибка измерения уровня сигнала, дБ, распределенная по нормальному закону с нулевым математическим ожиданием и среднеквадратическим отклонением (СКО) σΔU.
Если разброс прив. ш. цели и ошибку расчета аномалии включить в ошибку измерения уровня сигнала ΔU, а также зафиксировать скорость цели, то первое слагаемое в правой части формулы (1) можно считать неслучайной величиной. Тогда единственной случайной величиной в правой части формулы (1) останется ошибка измерения уровня сигнала ΔU, и условная ПРВ оценки уровня сигнала цели может быть вычислена по формуле [15]:
 I
I
где  - нормальная ПРВ случайной величины
- нормальная ПРВ случайной величины  с неслучайным аргументом , математическим ожиданием
с неслучайным аргументом , математическим ожиданием  и СКО
и СКО  .
.
Стохастическая модель оценки ВИП  имеет вид:
имеет вид:

где
-  - оценка ВИП цели в зависимости от класса цели ω и дистанции R, км, до нее, град/мин;
- оценка ВИП цели в зависимости от класса цели ω и дистанции R, км, до нее, град/мин;
- П - пеленг цели, град;
- Vω,ρ - относительная скорость цели, уз, вычисляемая по формуле:

- Kн, Vн - курс и скорость носителя ШПС, соответственно;
- Кω,Vω - курс и скорость цели;
- Kω,ρ - относительный курс цели, град, вычисляемый по формуле:

 - ошибка измерения ВИП цели, град/мин, распределенная по нормальному закону с нулевым математическим ожиданием и СКО
- ошибка измерения ВИП цели, град/мин, распределенная по нормальному закону с нулевым математическим ожиданием и СКО  .
.
Если курс и скорость цели, а также дистанция до нее постоянны, то по формуле (5) условная ПРВ оценки ВИП цели может быть вычислена по формуле:

Поскольку ошибки измерения уровня сигнала и ВИП цели можно считать взаимно независимыми, то совместная условная ПРВ оценок уровня сигнала и ВИП цели может быть вычислена как произведение правых частей формул (4) и (8):

Ввиду того, что нашей целью является получение ФП класса и дистанции цели, проинтегрируем обе части формулы (9) по ПРВ курса и скорости цели:

где  - ПРВ курса цели, 1/град;
- ПРВ курса цели, 1/град;
 - ПРВ скорости цели, 1/уз.
- ПРВ скорости цели, 1/уз.
Как было сказано выше, если в совместную условную ПРВ (10) в качестве аргументов подставить оценки уровня сигнала  и ВИП
и ВИП  , ПРВ становится ФП, зависящей только от класса цели ω и дистанции до нее R, и координаты максимума этой ФП соответствуют оптимальным значениям класса цели ωopt и дистанции до нее Ropt:
, ПРВ становится ФП, зависящей только от класса цели ω и дистанции до нее R, и координаты максимума этой ФП соответствуют оптимальным значениям класса цели ωopt и дистанции до нее Ropt:

Рассмотрим типовой случай, для которого:
1) гидроакустические условия соответствуют сплошной акустической освещенности в мелком море;
2) рабочий диапазон частот 3-6 кГц;
3) курс носителя Kн=0°;
4) скорость носителя Vн=6 уз;
5) цель обнаружена по пеленгу П=30°;
6) ПРВ курса подводной лодки и надводного корабля  подчинена нормальному распределению с математическим ожиданием, равным обратному пеленгу (т.е. предполагается, что цель идет нам навстречу), и СКО, равным 20°;
подчинена нормальному распределению с математическим ожиданием, равным обратному пеленгу (т.е. предполагается, что цель идет нам навстречу), и СКО, равным 20°;
7) ПРВ скоростей подводной лодки и надводного корабля  приведены на фиг. 1;
приведены на фиг. 1;
8) зависимости приведенной шумности цели от скорости P0/ω(Vω) приведены на фиг. 2;
9) СКО измерения уровня сигнала, учитывающая, в том числе, разброс приведенной шумности цели Р0/ω(V) и ошибку расчета аномалии, равна 6 дБ;
10) СКО измерения ВИП цели равна 0,01 град/мин.
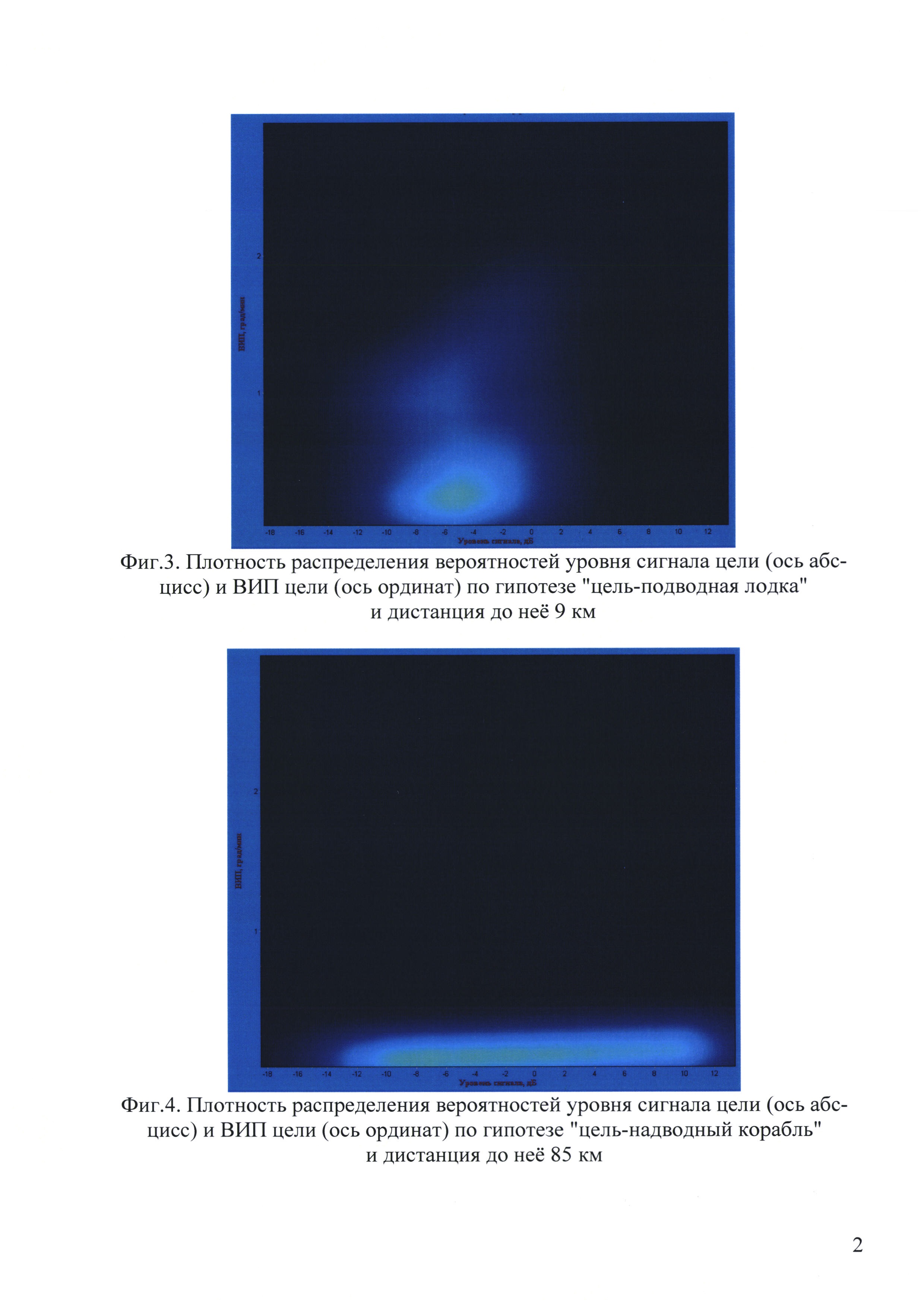
Совместные условные ПРВ уровня сигнала цели и ВИП цели  , соответствующие рассматриваемому случаю, приведены на фиг. 3 и 4. ПРВ на фиг. 3 рассчитана при условии, что цель - подводная лодка и дистанция до нее 9 км. ПРВ на фиг.4 рассчитана при условии, что цель - надводный корабль и дистанция до нее 85 км.
, соответствующие рассматриваемому случаю, приведены на фиг. 3 и 4. ПРВ на фиг. 3 рассчитана при условии, что цель - подводная лодка и дистанция до нее 9 км. ПРВ на фиг.4 рассчитана при условии, что цель - надводный корабль и дистанция до нее 85 км.
Пусть целью фактически является подводная лодка, находящаяся на дистанции от носителя ШПС 9 км и движущаяся курсом 150°, со скоростью 6 уз. Оценка уровня сигнала этой цели составила  , оценка ВИП -
, оценка ВИП -  . Подставляя эти значения оценок
. Подставляя эти значения оценок  и
и  вместо аргументов в ПРВ
вместо аргументов в ПРВ  , получим ФП
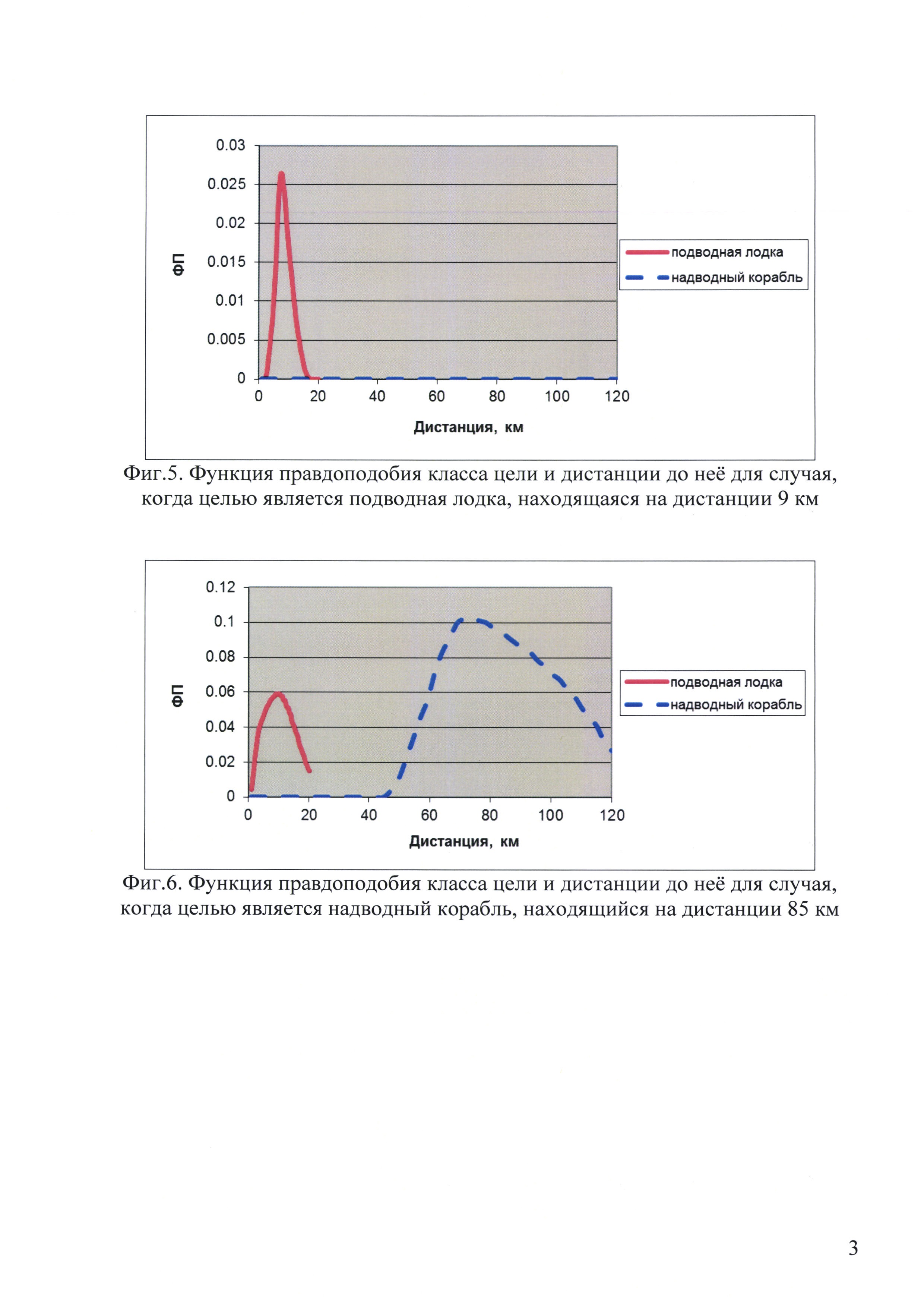
, получим ФП  , зависящую только от класса цели и дистанции до нее. Эта ФП изображена на фиг. 5.
, зависящую только от класса цели и дистанции до нее. Эта ФП изображена на фиг. 5.
Из рассмотрения графиков на фиг.5 следует, что максимальное значение ФП принимает при классе цели «подводная лодка» (сплошная линия) и дистанции до нее 7,6 км. Т.е. класс определен правильно и ошибка определения дистанции составила 16%, что для пассивного режима приемлемо.
Теперь рассмотрим случай, когда целью фактически является надводный корабль, находящийся на дистанции от носителя ШПС 85 км и движущийся курсом 150°, со скоростью 15 уз. Оценка уровня сигнала этой цели составила  , оценка ВИП -
, оценка ВИП -  . Подставляя эти значения оценок
. Подставляя эти значения оценок  и
и  вместо аргументов в ПРВ
вместо аргументов в ПРВ  , получим ФП
, получим ФП  , зависящую только от класса цели и дистанции до нее. Эта ФП изображена на фиг. 6.
, зависящую только от класса цели и дистанции до нее. Эта ФП изображена на фиг. 6.
Из рассмотрения графиков на фиг. 6 следует, что максимальное значение ФП принимает при классе цели «надводный корабль» (пунктирная линия) и дистанции до нее 74 км. Т.е. класс определен правильно и ошибка определения дистанции составила 13%, что также приемлемо.
Таким образом, заявляемый способ обеспечивает заявляемый результат, подтвержденный проведенным моделированием.
Источники информации
1. Справочник штурмана. Под ред. В.Д. Шандабылова // Воениздат, 1968.
2. Телятников В.И. Методы и устройства классификации гидроакустических сигналов // Зарубежная радиоэлектроника, 1979, №9, с. 19-38.
3. Телятников В.И. Методы и устройства для определения местоположения источника звука // Зарубежная радиоэлектроника, 1978, №4. С. 66-86.
4. Carter G. С. Passive Ranging Errors due to Receiving Hydrophone Position Uncertainty // JASA, 1979. Vol. 65, №2. P. 528-530.Hassab I.C., Boucher R.E. Passive Ranging Estimation from an Array of Sensors // Journal of Sound and Vibration, 1979. Vol.67, №2. P. 289-292.
5. Hassab I. C. Contact Localization and Motion Analysis in the Ocean Environment: a Perspective // IEEE Journal of Oceanic Engineering, 1983. Vol.OE-8, №3. P. 136-147.
6. Исак В.А. Измерение дистанции пассивными методами // Морской сборник, 1987. №5. С. 68-70.
7. Картер Дж.К. Обработка сигналов в пассивной гидролокации. В кн. Подводная акустика и обработка сигналов // М.: Мир, 1985. С. 415-421.
8. Quazi А.Н. An Overview on the Time-Delay Estimate in Active and Passive Systems for Target Localization // IEEE Transactions on ASSP, 1987. Vol., 9, №3. P. 527-533.
9. Патент РФ 2128848
10. Blackman S., Popoli R. Design and analyses of modern tracking systems // Ar-tech House, 1999. 1230 p.
11. Гампер Л.Е. О точности методов пассивной гидролокации с разнесенными бортовыми антеннами // "Гидроакустика", 2009, вып. 9, с. 34-42.
12. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы // СПб.: Наука, 2004.
13. Урик Р. Дж. Основы гидроакустики // Л.: Судостроение, 1978.
14. Бурдик B.C. Анализ гидроакустических систем / Пер. с англ. // Л.: Судостроение, 1988.
15. Вентцель Е.С., Овчаров Л.А. Теория вероятностей и ее инженерные приложения // М.: Наука, 1988.
16. Репин В.Г., Тартаковский Г.П. Статистический синтез при априорной неопределенности и адаптация информационных систем // М.: Советское радио, 1977.
17. Кендал М, Стьюарт А. Статистические выводы и связи // М.: Наука, 1973.
Способ определения класса шумящей цели и дистанции до нее, включающий формирование пеленгационного рельефа на выходе горизонтального веера характеристик направленности приемной гидроакустической антенны, обнаружение в пеленгационном рельефе методом двухстороннего контраста отметки цели, отличающийся тем, что с использованием пеленгационного рельефа измеряют уровень сигнала и величину изменения пеленга цели, с их использованием и с учетом условных плотностей распределения вероятностей скорости и приведенной шумности целей каждого класса, курса цели, ошибок измерения уровня сигнала, ошибок измерения величины изменения пеленга, а также зависимости энергетического спектра сигнала на входе приемной антенны от дистанции до цели в текущих гидроакустических условиях, вычисляют функцию правдоподобия класса и дистанции до цели, по координатам максимума которой принимают решения о классе цели и дистанции до нее.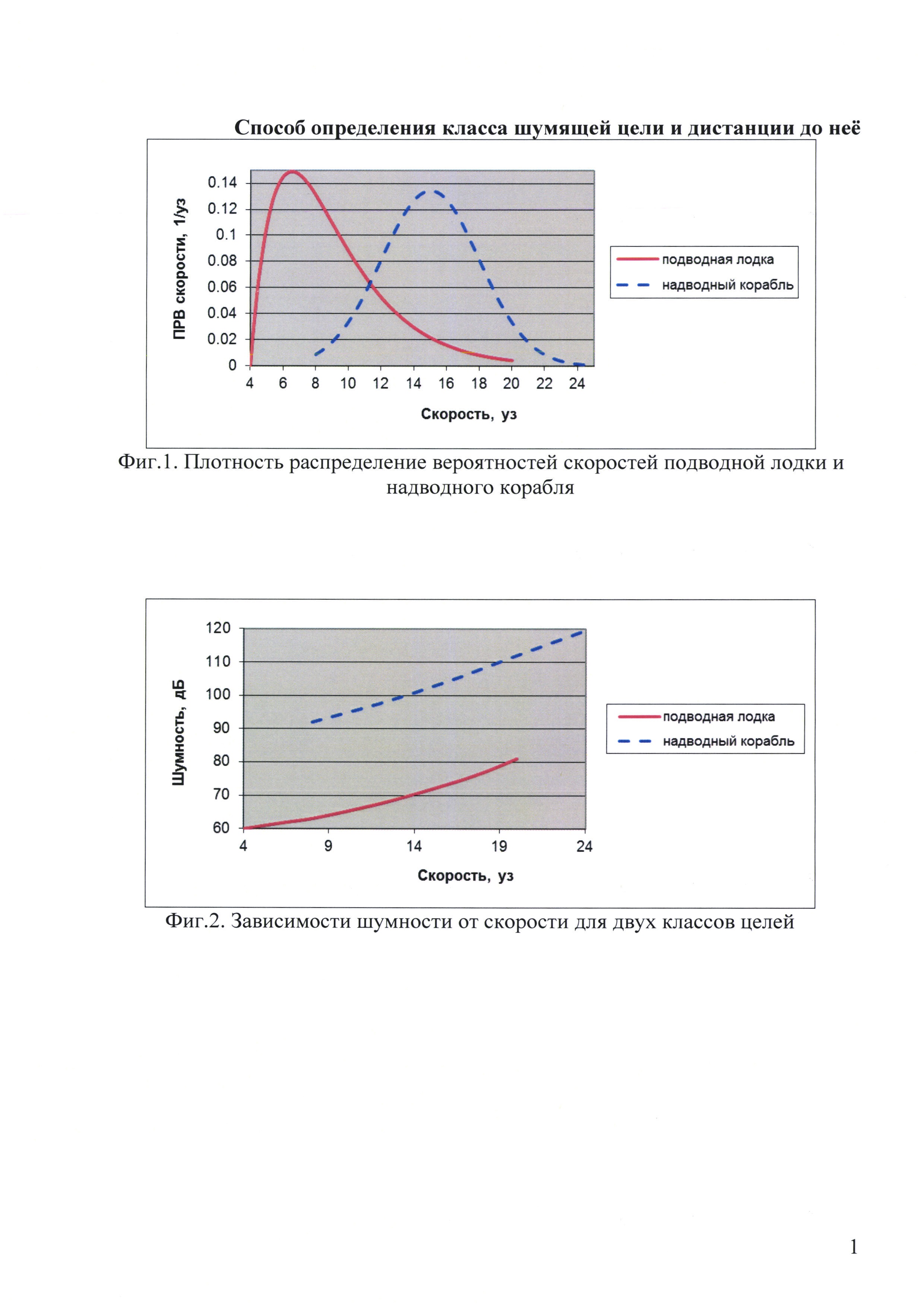
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Стенд для выработки угловых колебаний в двух плоскостях
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Микромеханический вибрационный гироскоп
Способ определения погрешностей двухстепенного поплавкового гироскопа с газодинамическим подвесом ротора гиромотора
Способ бесплатформенной инерциальной навигации на микромеханических чувствительных элементах
Способ изготовления ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп
Способ обработки информации в гидроакустической антенне
Способ оценки полного профиля вертикального распределения скорости звука
Способ получения упругого и звукопоглощающего полимерного материала с термопластичными микросферами
Бескорпусная гидроакустическая антенна
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Способ определения координат (пеленга и дистанции) и параметров движения (курса и скорости) морской шумящей цели
Способ формирования характеристики направленности плоской, горизонтально расположенной многоэлементной излучающей антенны доплеровского лага
Способ измерения скорости судна доплеровским лагом
Способ измерения скорости судна доплеровским лагом
Способ измерения скорости судна доплеровским лагом

