Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ЭКСПЛУАТАЦИОННЫХ АНОМАЛИЙ В ПОЕЗДНЫХ СОСТАВАХ И ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНАХ
Вид РИД
Изобретение
Ссылка на родственную заявку
Согласно настоящей заявке испрашивается приоритет в соответствии с предварительной заявкой на выдачу патента США №61/920,700, поданной 24 декабря 2013 года, содержание которой данной ссылкой полностью включено в настоящий документ.
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к области управления безопасностью железнодорожных вагонов и поездов и, в частности, к системе и способу непрерывного сбора и анализа эксплуатационных параметров железнодорожных вагонов и поездных составов для обнаружения аномальных условий эксплуатации.
Предшествующий уровень техники настоящего изобретения
В настоящее время мониторингом подшипников и взаимодействий колес и рельсов для поездных составов управляют в основном путем использования придорожных детекторов, расположенных на протяжении рельсовой системы, к которым относятся детекторы для мониторинга температуры колесных подшипников железнодорожных вагонов, а также детекторы ударной нагрузки колес, которые идентифицируют поврежденные колеса путем мониторинга ударной нагрузки на рельсы. Такие детекторы устанавливают в фиксированных местах железнодорожной сети.
После того способы мониторинга были введены в эксплуатацию, указанные способы обеспечивают операторов железных дорог информацией, позволяющей улучшить эффективность функционирования железнодорожных вагонов и поездных составов. Однако эти детекторы лишены преимуществ беспроводной сети, способной передавать информацию и данные касательно эксплуатационных аномалий, таких как сход с рельсов железнодорожного вагона, состояние подшипников и колес, когда они находятся вне зоны охвата детекторов, и повреждение колеса. Кроме того, известные способы не предоставляют механизма для непрерывного мониторинга объектов в любом местоположении железнодорожной сети.
В области железнодорожных перевозок повреждение колеса влечет за собой значительные эксплуатационные расходы, связанные с колесами железнодорожного вагона, корпусом железнодорожного вагона, компонентами железнодорожного вагона, рельсовыми путями и шпалами. Колеса, которые имеют дефекты в виде плоских участков на поверхности катания (ползуны), характеризуются наличием несимметричной поверхности катания, которая входит во взаимодействие с рельсом. При вращении колеса поврежденный участок создает аномальную ударную нагрузку, которая может вызывать дополнительное повреждение колеса, повреждение железнодорожного вагона, а также повреждения рельсов и верхнего строения железнодорожного пути.
Тем не менее, в настоящее время не существует надежной системы для непрерывного мониторинга температуры колесных подшипников или взаимодействий колес и рельсов, в которой не предусмотрена установка детектора ударной нагрузки колес на участке пути, или которая могла бы осуществлять мониторинг в областях между детекторами. Таким образом, существует необходимость в разработке системы и способа бортового мониторинга в режиме реального времени различных эксплуатационных параметров железнодорожного вагона и/или поездных составов, а также анализа показаний в режиме реального времени для прогнозирования или своевременного обнаружения аномальных условий эксплуатации.
Краткое раскрытие настоящего изобретения
Предлагаемая в настоящем документе система направлена на устранение недостатков, присущих системам мониторинга железнодорожных вагонов и поездных составов. Предлагаемая система состоит из иерархической структуры компонентов, которые обеспечивают возможность осуществления распределенного анализа данных, что позволяет обнаружить эксплуатационные аномалии на различных уровнях иерархии, при этом предлагаемая система предоставляет поток данных, событий и предупредительных сигналов в центральный пункт.
На самом нижнем уровне иерархии каждый железнодорожный вагон оснащен множеством беспроводных сенсорных узлов (именуемых в единственном числе «БСУ»), которые находятся в ячеистой сети, управляемой блоком управления связью («БУС»), который, как правило, установлен на этом же железнодорожном вагоне, при этом такую сеть в настоящем документе именуют вагонной ячеистой сетью. Беспроводные сенсорные узлы собирают данные, относящиеся к различным эксплуатационным параметрам железнодорожного вагона, и способны обнаруживать определенные аномалии на основе собранных данных. Если узел обнаруживает аномальные эксплуатационные данные, то может быть подан предупредительный сигнал с передачей данных в блок управления связью, установленный на железнодорожном вагоне. Хотя в приведенных в настоящем документе вариантах осуществления используют ячеистые сети, другие типы топологии сетей также могут быть использованы.
Блоки управления связью, установленные на каждом железнодорожном вагоне, также входят в состав ячеистой сети, управляемой питаемым энергией беспроводным шлюзом, который, как правило, установлен на локомотиве. Такую сеть в настоящем документе будут именовать поездной ячеистой сетью. И снова следует отметить, что, хотя в приведенных в настоящем документе вариантах осуществления используют ячеистые сети, другие типы топологии сетей также могут быть использованы.
Поездная беспроводная ячеистая сеть охватывает весь поездной состав и доставляет информацию о железнодорожных вагонах в питаемую электроэнергией хост-машину или пункт управления, такой как локомотив или объект с доступом к источнику питания, а также в удаленный центр эксплуатации железной дороги.
Краткое описание фигур
Настоящее изобретение может быть лучше и более полно понято при ознакомлении с «Подробным раскрытием настоящего изобретения», выполненным со ссылками на прилагаемые фигуры, где:
на фиг. 1 представлено схематическое изображение железнодорожного вагона 103, оснащенного блоком 101 управления связью (БУС) и множеством беспроводных сенсорных узлов (БСУ) 104, которые установлены на нем и образуют вагонную ячеистую 105 сеть;
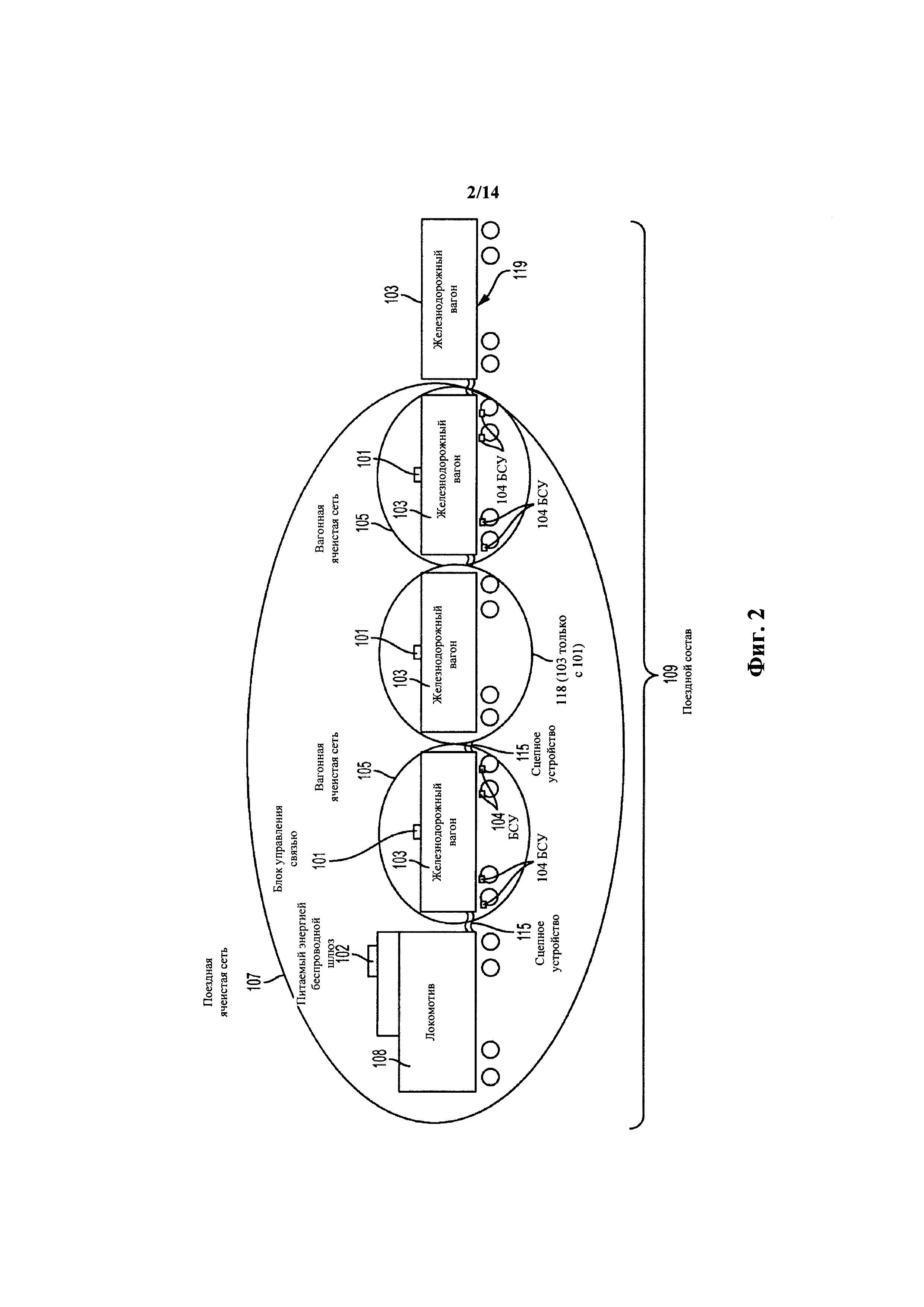
на фиг. 2 представлено схематическое изображение поездной ячеистой сети с двумя железнодорожными вагонами 103, каждый из которых оснащен БУС 101 и множеством БСУ 104, железнодорожным вагоном 103, оснащенным только БУС 101 (без БСУ), железнодорожным вагоном 103 без БУС или БСУ и питаемым энергией беспроводным шлюзовым устройством 102, которое установлено на локомотиве 108;
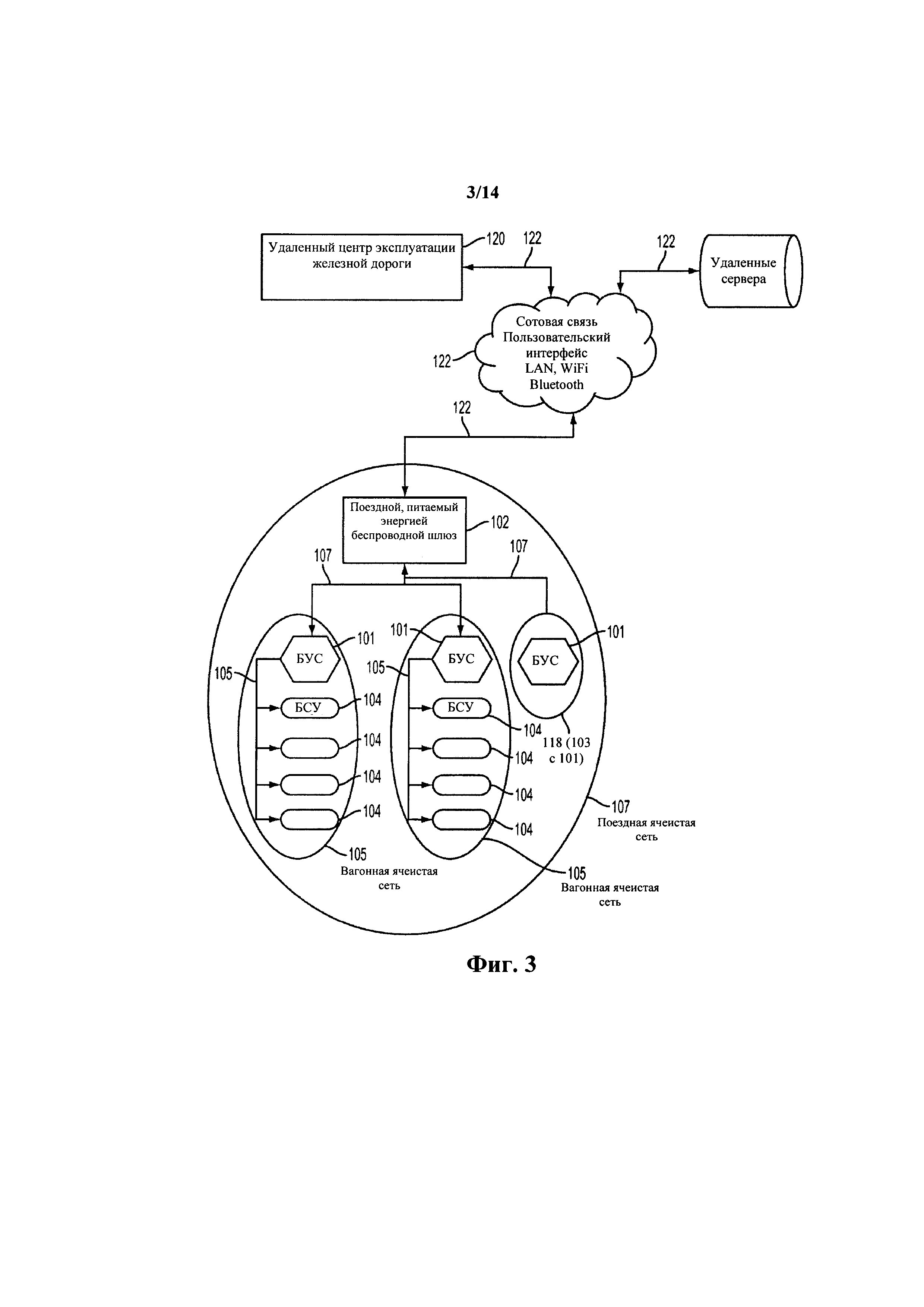
на фиг. 3 изображена поездная ячеистая сеть 107 и различные средства передачи данных за пределами поезда;
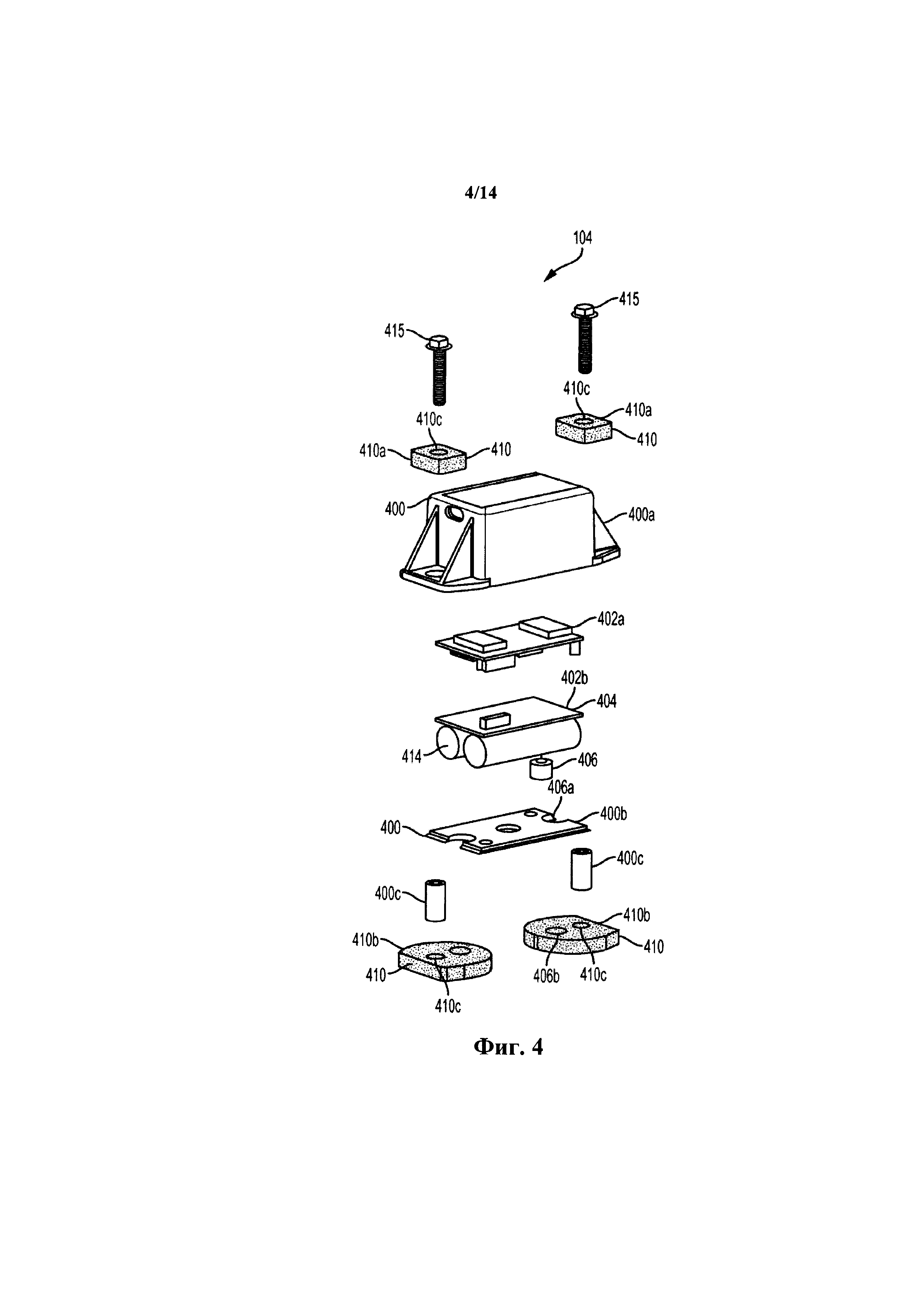
на фиг. 4 представлен покомпонентный вид первой модификации БСУ 104, которая может быть использована, например, для мониторинга температуры подшипника и углового ускорения колеса;
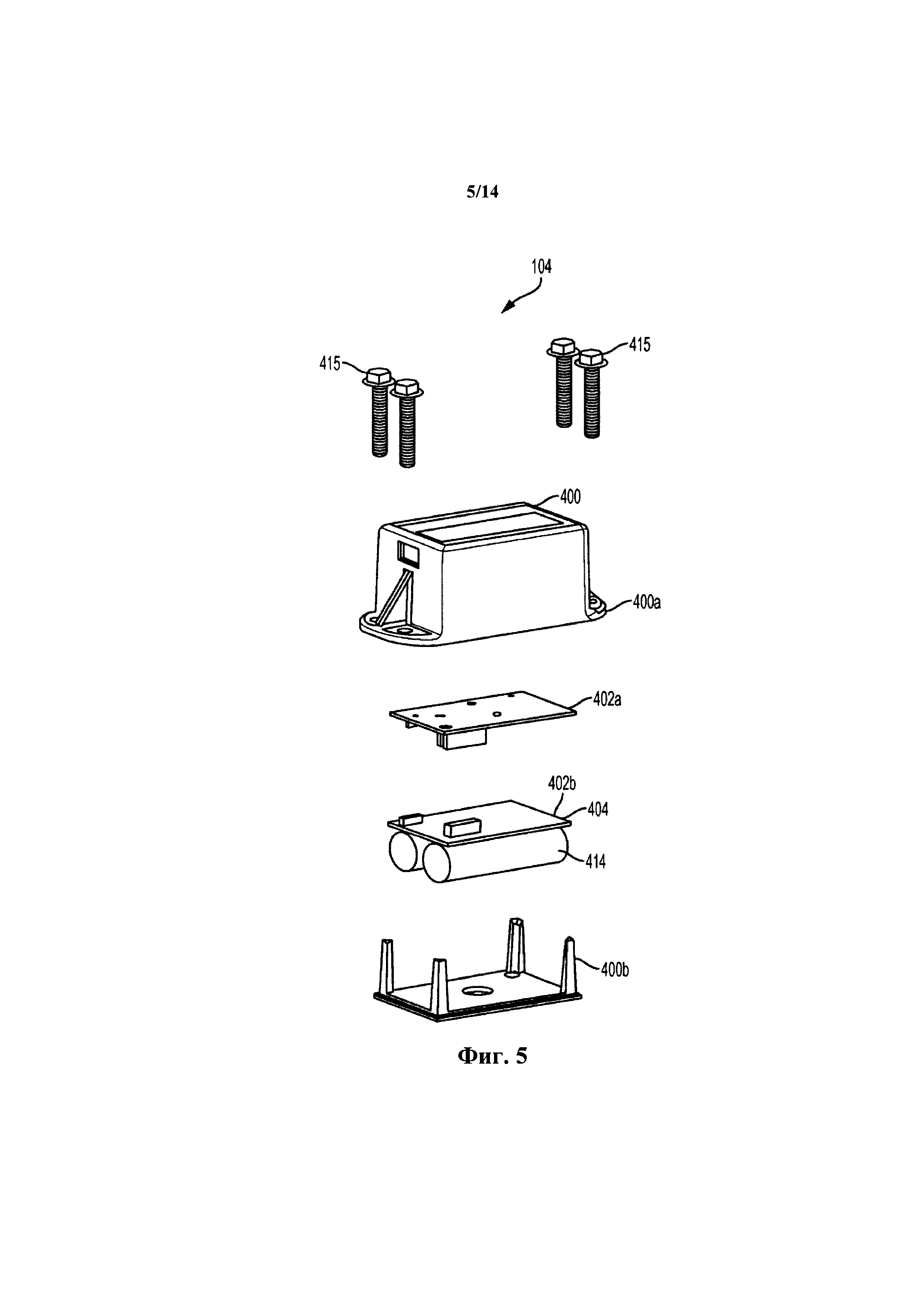
на фиг. 5 представлен покомпонентный вид второй модификации БСУ 104, которая может быть использована, например, для мониторинга ускорения корпуса железнодорожного вагона, и которая может включать в себя датчик температуры (не показан) для осуществления мониторинга температуры;
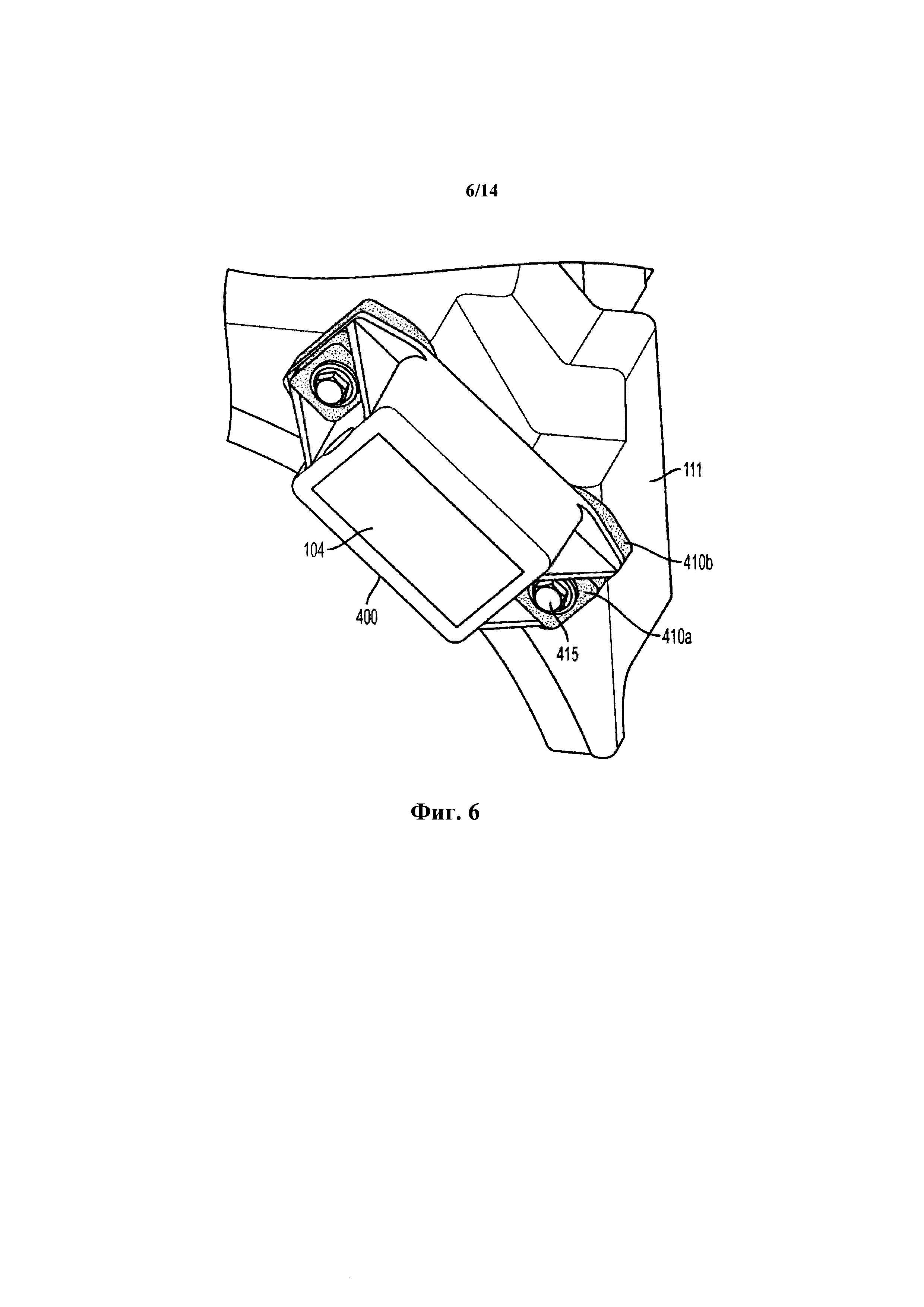
на фиг. 6 представлен БСУ 104, изображенный на фиг. 4, который установлен на узел 111 крепления колесного подшипника железнодорожного вагона;
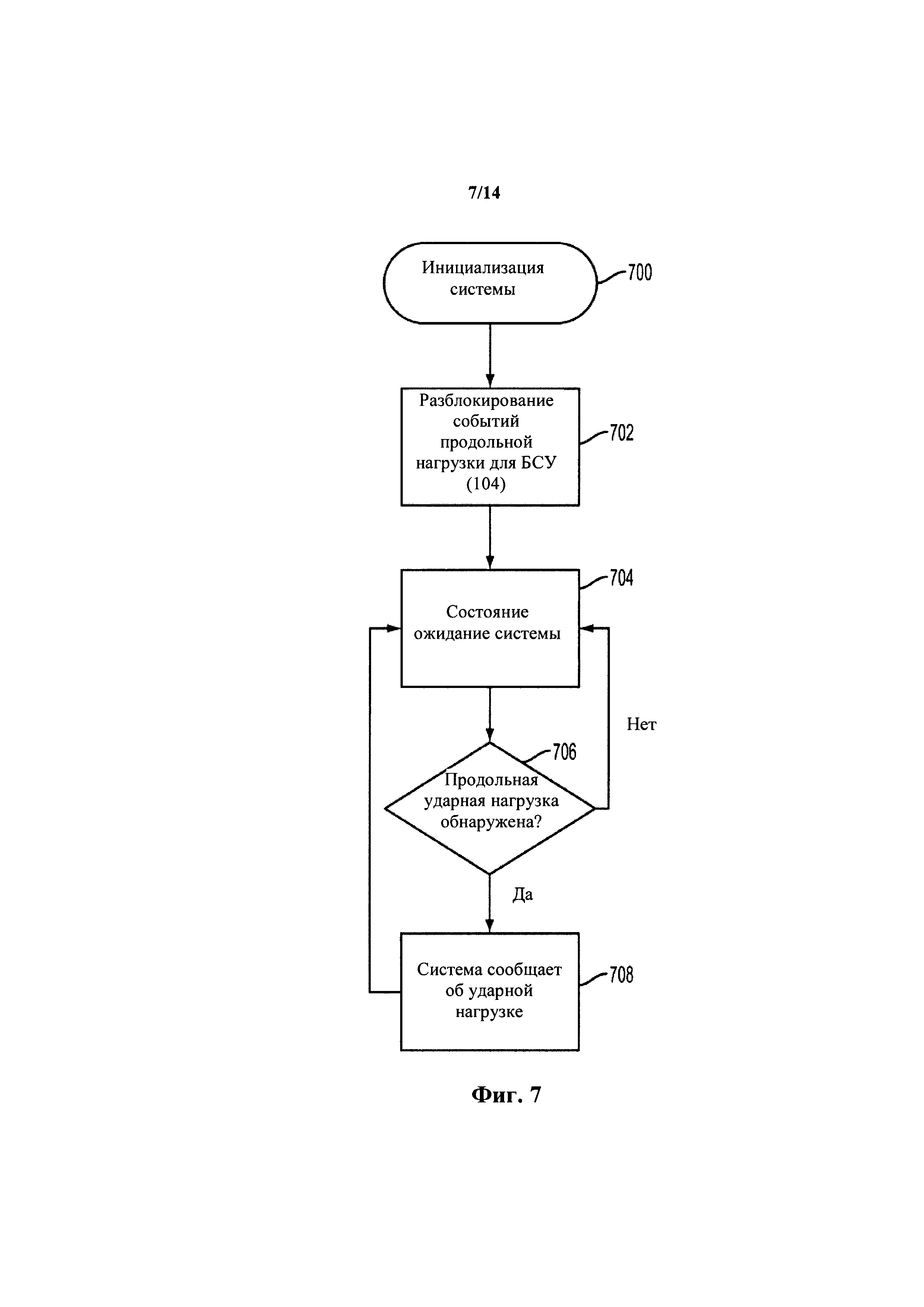
на фиг. 7 представлена блок-схема, на которой представлены условия, при которых блокируют и разблокируют обработку события ускорения при продольной ударной нагрузке;
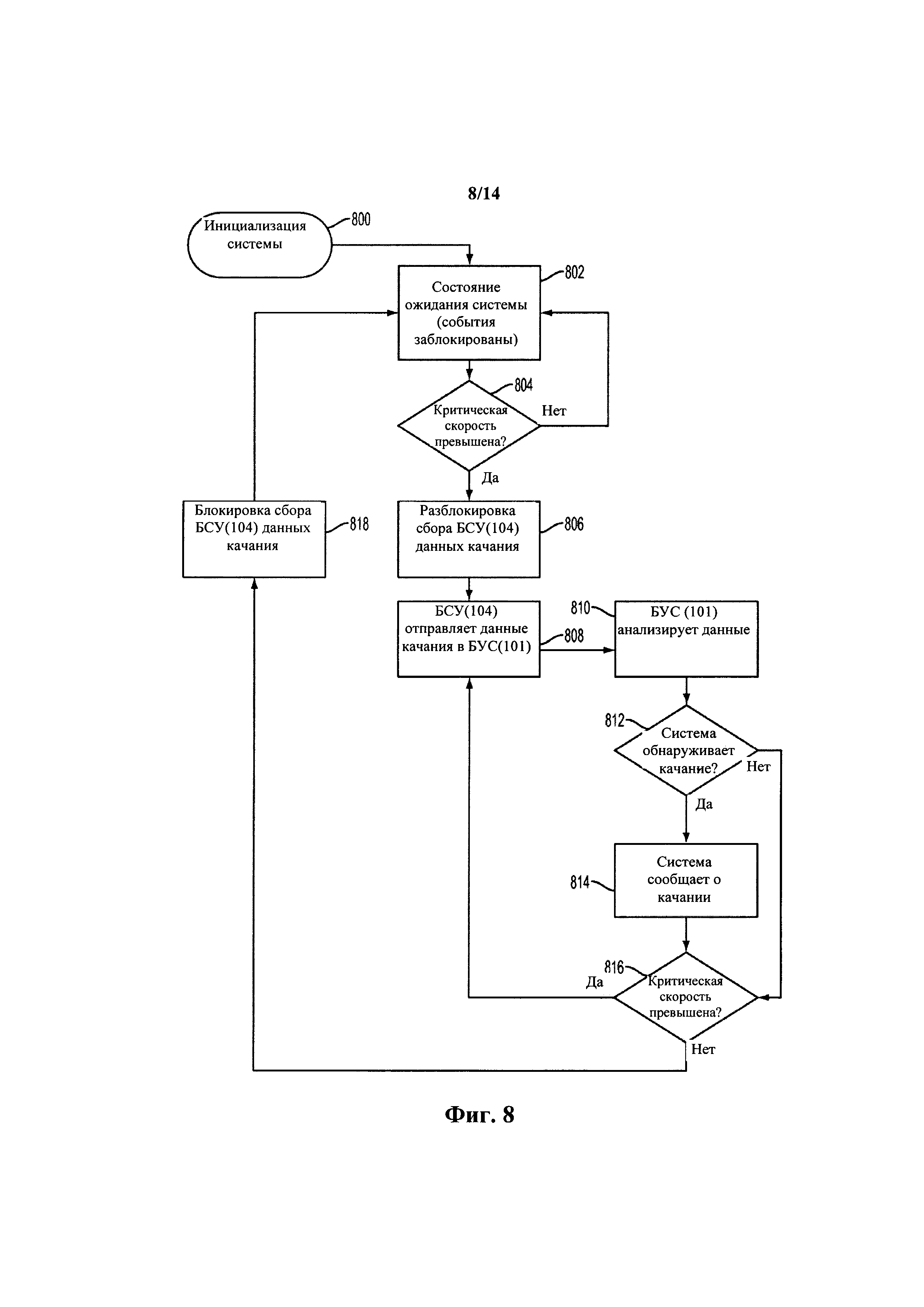
на фиг. 8 представлена блок-схема, на которой представлены условия, при которых блокируют и разблокируют обработку события ускорения при вертикальном и боковом качании;
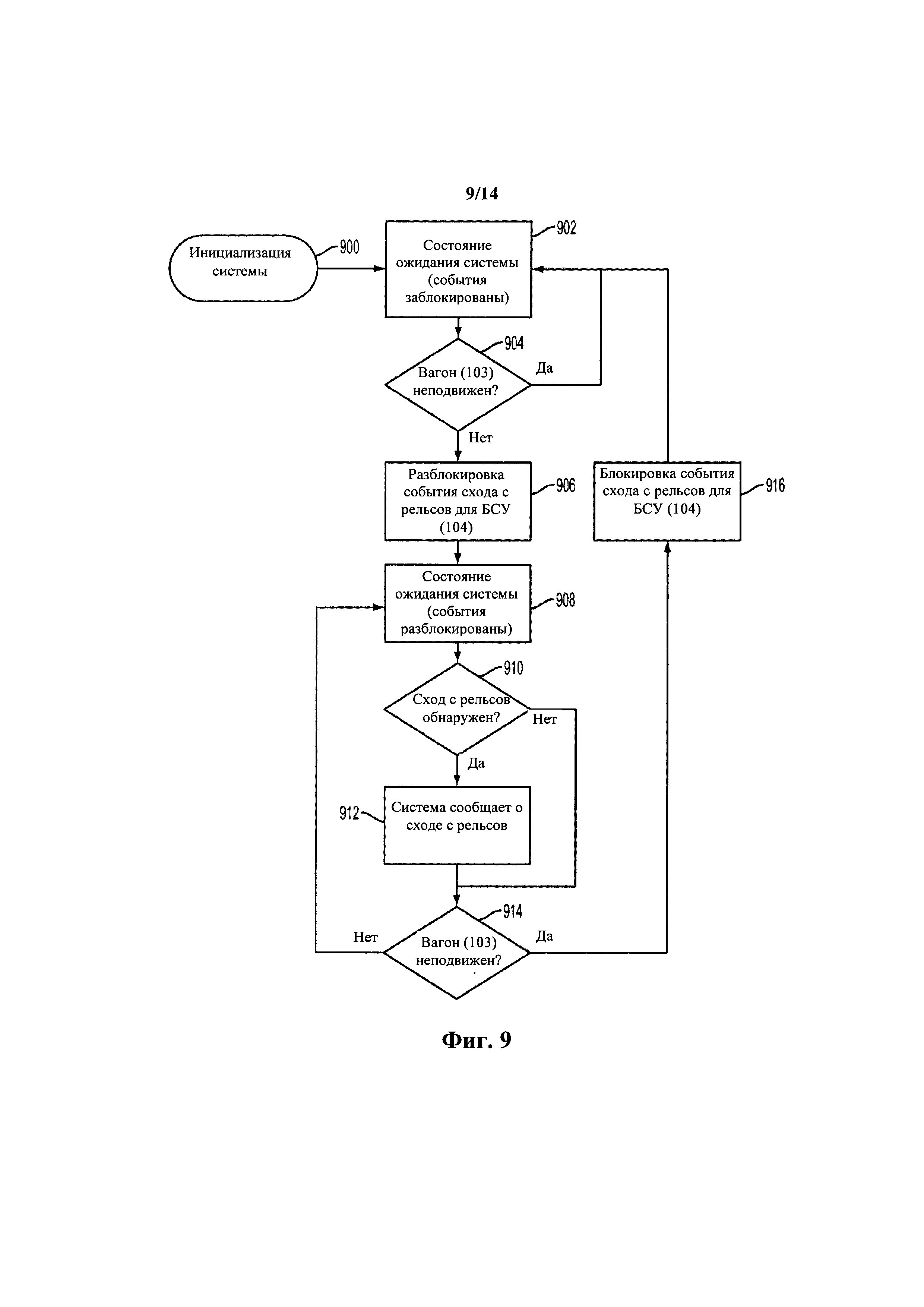
на фиг. 9 представлена блок-схема, на которой представлены условия, при которых блокируют и разблокируют обработку события мониторинга схода с рельсов;
на фиг. 10 представлена блок-схема, на которой представлены условия, при которых блокируют и разблокируют обработку события повреждения колеса или вертикальной ударной нагрузки;
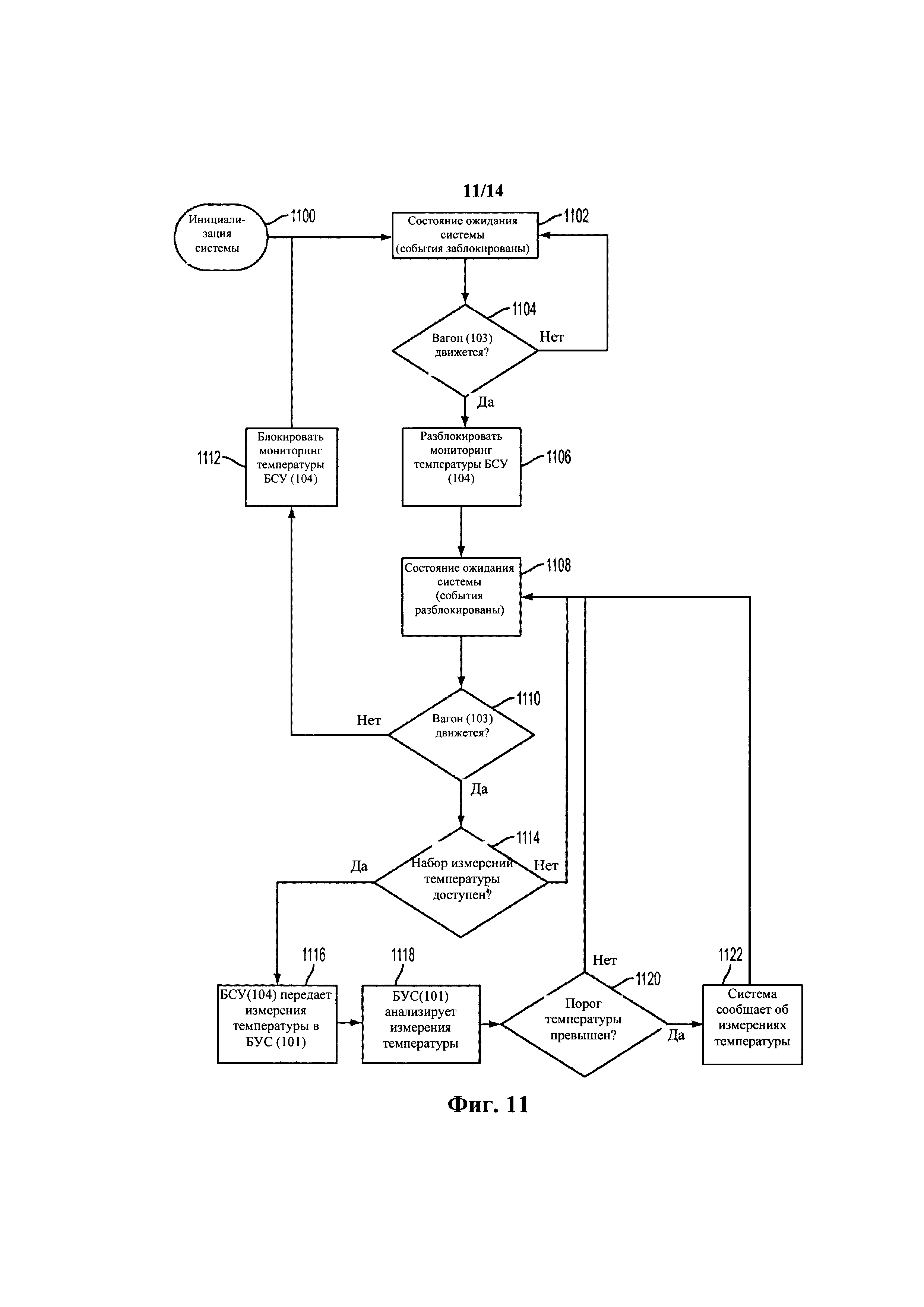
на фиг. 11 представлена блок-схема, на которой представлены условия, при которых блокируют и разблокируют обработку события изменения температуры подшипника;
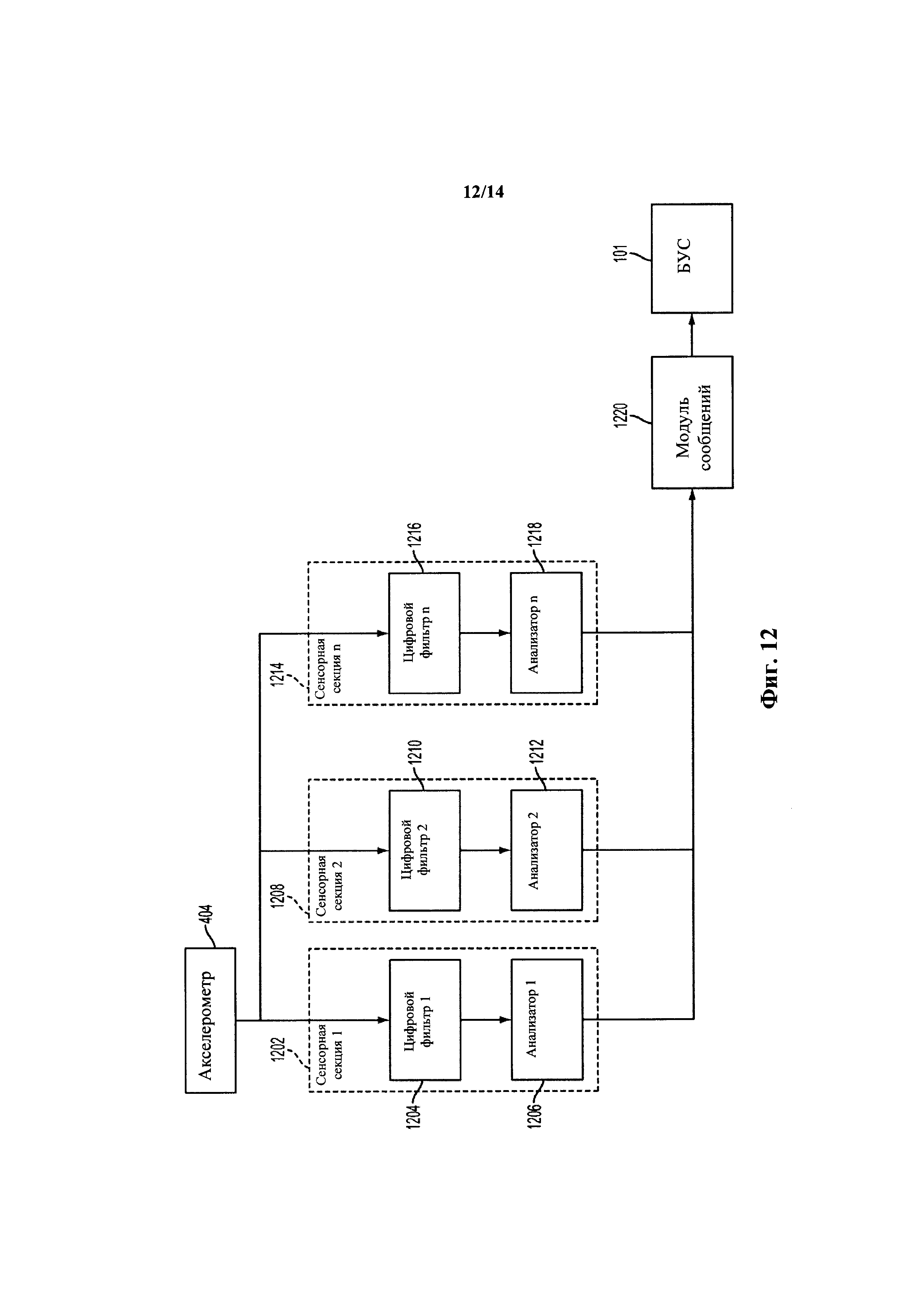
на фиг. 12 представлена архитектурная схема, на которой изображена обобщенная модель для реализации участка анализа данных БСУ 104;
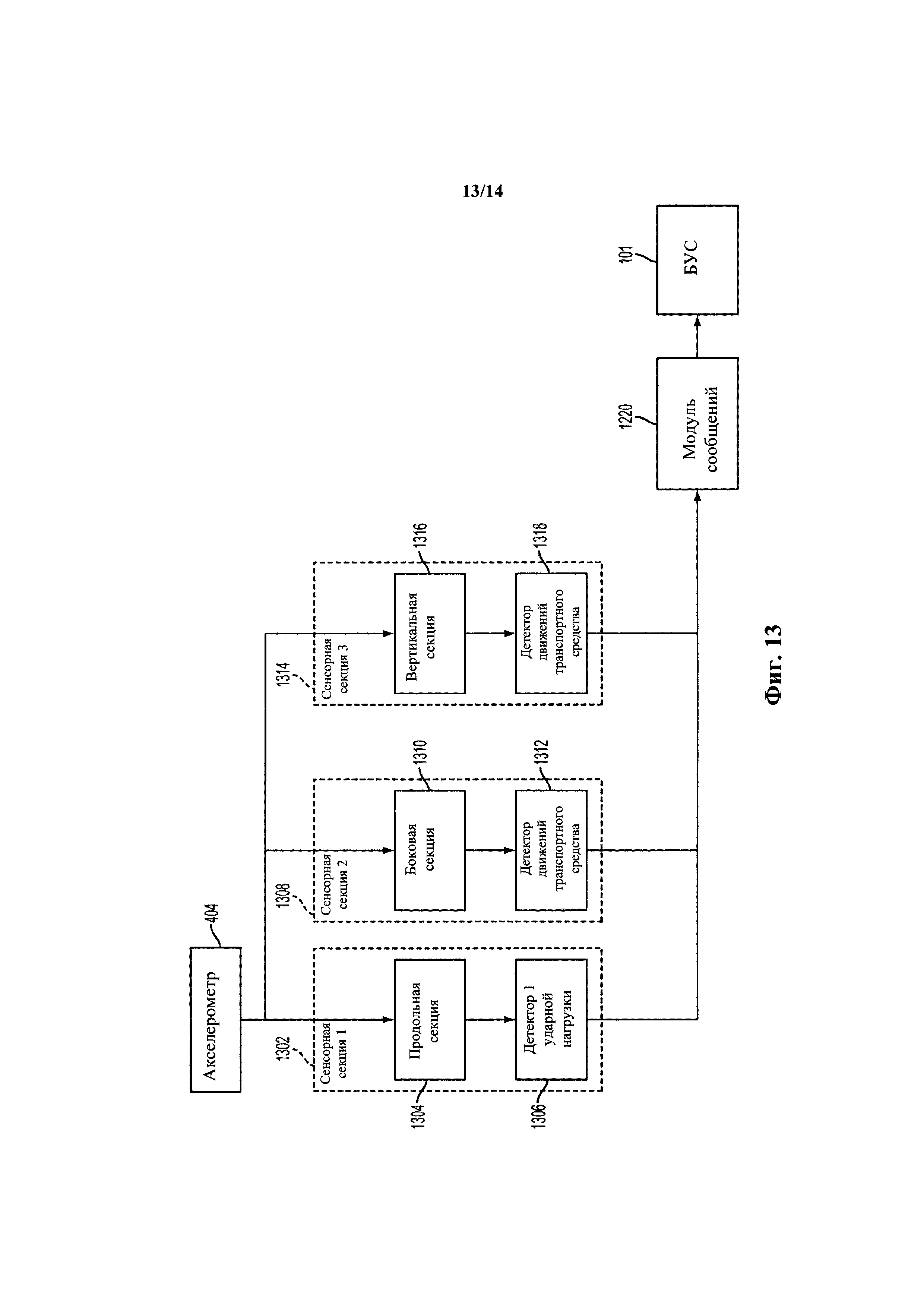
на фиг. 13 представлена специфическая реализация модели, изображенной на фиг. 12, направленная на обнаружение события изменения состояния корпуса железнодорожного вагона;
на фиг. 14 представлена другая специфическая реализация модели, изображенной на фиг. 12, при этом указанная реализация направлена на обнаружение событий изменения состояния колесного подшипника.
Подробное раскрытие настоящего изобретения
В контексте настоящего документа железнодорожный вагон может быть одиночным железнодорожным вагоном 103 (см. фиг. 1) или может состоять из двух или более железнодорожных вагонов 103, которые прочно соединены друг с другом, как правило, именуемых специалистами в данной области техники «тандемной парой», «пачкой из трех вагонов», «пачкой из пяти вагонов» и т.п.
Под поездным составом, который обозначен на фигурах позицией 109 (см. фиг. 2), следует понимать соединенную группу железнодорожных вагонов 103 и локомотивов 108.
Блок управления связью («БУС»), который обозначен на фигурах позицией 101, предпочтительно расположен на железнодорожном вагоне 103 и управляет работой вагонной ячеистой сети 105 (определение которой приведено ниже), покрывающей железнодорожный вагон 103, который может состоять из одного или более индивидуальных железнодорожных вагонов 103, которые прочно соединены друг с другом. Аппаратное оборудование БУС 101 предпочтительно включает в себя процессор, источник питания (например, аккумулятор, солнечную батарею, устройство для сбора электроэнергии, или внутреннее средство для генерирования электроэнергии), устройство глобальной навигационной спутниковой системы (ГНСС), такое как приемник глобальной системы позиционирования («GPS»), средство связи Wi-Fi, спутниковой связи и/или сотовой связи, средство беспроводной связи для создания вагонной ячеистой сети 105 и обеспечения беспроводной связи с поездной ячеистой сетью 107 и, необязательно, один или несколько датчиков, включая, кроме прочего, акселерометр 404, гироскоп или датчик 406 температуры.
БУС 101 обеспечивает поддержку одного или нескольких БСУ 104 (определение которого приведено ниже) в конфигурации ячеистой сети с использованием открытых стандартных протоколов, таких как стандарт IEEE 2,4 ГГц 802.15.4. Дополнительно, БУС 101 также является членом поездной ячеистой сети 107, которая состоит из множества БУС 101, установленных на всех доступных железнодорожных вагонах 103 в поездном составе 109, и управляется питаемым энергией беспроводным шлюзом 102, который, как правило, расположен в локомотиве 108. Таким образом, БУС 101 выполняет четыре функции: 1) управление маломощной вагонной ячеистой сетью 105, охватывающей железнодорожный вагон 103; 2) объединение данных из одного или нескольких БСУ 104 в вагонной ячеистой сети 105, а также применение к собранным данным некоторой логической схемы, чтобы сгенерировать предупредительные сигналы для хост-машины, такой как локомотив 108 или удаленный центр 120 эксплуатации железной дороги; 3) поддержка встроенных датчиков, таких как акселерометр 404, внутри БУС 101 для мониторинга специфических параметров железнодорожного вагона 103, таких как местоположение, скорость и ускорение, и осуществления анализа этих данных для генерирования предупредительных сигналов; и 4) поддержка двухстороннего обмена данными в восходящем направлении с хост-машиной или пунктом управления, таким как локомотив 108 и/или находящийся за пределами поезда удаленный центр 120 мониторинга и эксплуатации железной дороги, и нисходящем направлении с одним или несколькими БСУ 104, расположенными в железнодорожном вагоне 103. БУС 101 могут осуществлять беспроводной обмен данными с питаемым энергией беспроводным шлюзом (далее ПЭБШ 102) в конфигурации ячеистой сети или могут быть сконфигурированы для обмена данными через проводное соединение, например, пневматическую тормозную систему с электронным управлением. Специалистам в данной области техники будет понятно, что GPS является лишь одним примером глобальной навигационной спутниковой системы (ГНСС). К другим типам ГНСС относятся системы ГЛОНАСС и Бэйдоу, а также другие находящиеся в разработке системы. Таким образом, хотя GPS используют в описанных в настоящем документе вариантах осуществления, может быть использован любой тип системы или устройств ГНСС.
БУС 101 способен получать данные и/или сигналы тревоги от одного или нескольких БСУ 104 и способен выводить заключения на основе этих данных или сигналов тревоги в отношении функционирования железнодорожного вагона 103, а также передавать данные или тревожную информацию в удаленный приемник. БУС 101 предпочтительно является одиночным блоком, который служит в качестве канала связи с другими местоположениями, такими как питаемый энергией беспроводной шлюз 102 (предпочтительно расположенный в локомотиве 108) или удаленный центр 120 эксплуатации железной дороги, и характеризуется возможностью обработки принятых данных. БУС 101 также осуществляет обмен данными с БСУ 104, а также управление и мониторинг БСУ 104 при помощи вагонной локальной ячеистой сети 105.
Питаемый энергией беспроводной шлюз («ПЭБШ»), который обозначен на фигурах позицией 102 (см., например, фиг. 2), предпочтительно расположен в локомотиве 108 или в любом другом месте поездного состава 109, в котором расположен внешний источник электропитания. Как правило, шлюз будет содержать процессор; приемник GPS; один или несколько датчиков, включая, кроме прочего, акселерометр 404, гироскоп или датчик 406 температуры; спутниковую и/или сотовую систему связи; локальный беспроводной приемопередатчик (например, WiFi); Ethernet-порт; высокомощное устройство управления ячеистой сетью и другие средства обмена данными. ПЭБШ 102 будет получать электроэнергию от локомотива 108, когда он расположен в снабжаемом электроэнергией объекте, таком как локомотив 108, или будет получать электроэнергию из другого источника, например, гелиоустановки или аккумулятора большой емкости. ПЭБШ 102 осуществляет управление поездной ячеистой сетью 107, покрывающей поездной состав 109, которая состоит из множества БУС 101 от каждого железнодорожного вагона 103 в поездном составе 109.
Компоненты и конфигурация ПЭБШ 102 аналогичны компонентам и конфигурации БУС 101, единственное исключение состоит в том, что ПЭБШ 102, как правило, получает электроэнергию из внешнего источника, тогда как БУС 101 характеризуется наличием собственного источника питания. Кроме того, ПЭБШ 102 собирает данные и выводит заключения в отношении функционирования поездного состава 109 и поездной ячеистой сети 107, тогда как БУС 101 выводят заключения в отношении функционирования индивидуальных железнодорожных вагонов 103 и вагонной ячеистой сети 105 или 118.
Вагонная ячеистая сеть, обозначенная на фигурах позицией 105 (см., например, фиг. 1 и 2), состоит из БУС 101, установленного на железнодорожном вагоне 103, который является частью и осуществляет управление вагонной ячеистой сетью 105, и множества БСУ 104, каждый из которых расположен предпочтительно на этом же железнодорожном вагоне 103.
Беспроводной сенсорный узел («БСУ»), обозначенный на фигурах позицией 104 (см., например, фиг. 1 и 2), установлен на железнодорожном вагоне 103 и обеспечивает функции сбора данных от внутренних датчиков и анализа данных, полученных от датчиков, чтобы определить, должны ли быть данные переданы немедленно, оставлены для последующей передачи или сгруппированы в событие или сигнал тревоги. БСУ 104 используют для контроля отслеживаемого параметра (например, температуры подшипников или внешней среды) или состояния (например, положения люка или ручного тормоза). Согласно предпочтительному варианту осуществления каждый БСУ 104 оснащен одним или несколькими акселерометрами или гироскопами, а также одним или несколькими датчиками температуры. Примеры БСУ 104 раскрыты в опубликованной заявке на выдачу патента США №2013/0342362, раскрытие которой данной ссылкой полностью включено в настоящий документ. Покомпонентный вид типичного БСУ 104 представлен на фиг. 4 и фиг. 5, при этом подробное описание указанного узла будет приведено ниже.
Рассмотрим фиг. 4, со ссылками на которую будет описан пример первой модификации БСУ 104. БСУ 104, изображенный на фиг. 4, сконфигурирован и настроен для обнаружения определенных видов событий ускорения и событий изменения температуры и, как правило, установлен на узле 111 крепления колесного подшипника железнодорожного вагона 103, где на него, вероятней всего, будут воздействовать различные степени ускорения, и где он сможет легко собрать данные, касающиеся температуры колесного подшипника. Компоненты БСУ 104 размещены внутри корпуса 400, который содержит оболочку 400а и основание 400b для крепления оболочки. Предпочтительно, секции 400а, 400b корпуса изготовлены из жесткой пластмассы, устойчивой к воздействию окружающей среды, такой как устойчивый к воздействию ультрафиолетового излучения полимер, например, смесь поликарбоната/акрилонитрил-бутадиен-стирола, при этом в собранном состоянии указанные секции защищают от воздействий окружающей среды. После установки различных компонентов в корпус, как описано ниже, заливочную массу (не показана) заливают через отверстия в корпусе 400 для того, чтобы обеспечить изоляцию, покрытие и герметизацию расположенных внутри компонентов. К таким массам относятся эпоксидные смолы, полиуретаны и кремнийорганические соединения. Гибкий уретан, который подходит для применения в электрических приборах и через который могут быть переданы радиосигналы, является предпочтительным. Было обнаружено, что характеристики используемой заливочной массы также являются важным при осуществлении надлежащей настройки БСУ 104 для обнаружения различных типов ускорений. Заливочная масса с твердостью на дюрометре по Шору 59 единиц по шкале 00 является предпочтительной.
Дополнительно, механический фильтр 410, состоящий из верхних секций 410а и нижних секций 410b, служит для механической фильтрации высокочастотных и низкочастотных типов ускорений, которые считаются шумом и которые предпочтительно удаляют из интересуемого сигнала. Предпочтительно, эти компоненты выполнены соответственно из кремнийорганического материала, характеризующегося твердостью на дюрометре по Шору 70 единиц по шкале А (верхние секции 410а фильтра) и 30 единиц по шкале А (нижние секции 410b фильтра) в виду различий площадей поверхности каждой секции, что влияет на характеристики фильтрации.
Согласно предпочтительному варианту осуществления каждый БСУ 104 может характеризоваться наличием одного или нескольких акселерометров 404 и одного или нескольких датчиков 406 температуры. Настройку БСУ 104 осуществляют путем сочетания выбора заливочной массы, твердости на дюрометре верхних и нижних механических фильтрующих элементов 410а и 410b на основе кремнийорганического материала, и программной фильтрации, осуществляемой при помощи программного обеспечения, выполняемого в процессоре, установленном на материнской печатной плате 402а. Используемый программный фильтр является цифровым фильтром для снижения шума от нежелательных частот ускорения и усиления сигналов от интересуемых частот ускорения.
Датчик 406 температуры содержит теплопередающий элемент, который проходит через отверстие 406а, выполненное в основании 400b для крепления оболочки, и отверстие 406b, выполненное в секции 410b фильтра. Предпочтительно, теплопередающим элементом является латунная заглушка. Эта конфигурация является предпочтительной для осуществления мониторинга температуры поверхности, к которой прикреплен БСУ 104, так как теплопередающий элемент будет взаимодействовать с указанной поверхностью. Согласно предпочтительным вариантам осуществления настоящего изобретения датчик 406 температуры является терморезистором, термопарой или датчиком температуры на основе кремнийорганического материала, который идеально подходит для электронных схем. Согласно этому варианту осуществления БСУ 104 будет установлен так, чтобы теплопередающий элемент находился в тепловом контакте с частью железнодорожного вагона 103, температуру которой необходимо знать. Дополнительно, нижние секции 410b механического фильтра характеризуются подходящей толщиной для создания воздушного зазора между основанием 400b для крепления оболочки и поверхностью, на которой установлен БСУ 104. Нижние секции 410b механического фильтра и воздушный зазор создают хорошую теплоизоляцию и обеспечивают низкую теплопередачу от поверхности, на которой установлен БСУ 104. Наличие теплоизоляции предохраняет электронику (всю кроме датчика 406 температуры) и источник питания от воздействия тепла и потенциального повреждения в результате перегрева. БСУ 104 может также быть оснащен дополнительными датчиками температуры (не показаны) для измерения температуры внешней среды.
Согласно предпочтительному варианту осуществления самонарезающие винты 415 используют для крепления БСУ 104 к железнодорожному вагону 103 и для удерживания на месте верхней и нижней частей 410а и 410b механического фильтра. Длину распорных втулок 400с, которые входят в отверстия 410с для винтов в подушках фильтра, выбирают таким образом, чтобы отрегулировать величину сжимающего усилия, прикладываемого к секциям 410а и 410b фильтров при затягивании винтов 415. Без использования распорных втулок 400с характеристики фильтрации, присущие фильтрам, могут быть изменены из-за сжатия, прикладываемого в результате чрезмерного затягивания винтов 415. Распорные втулки выполняют из материала с подходящей жесткостью.
Специалисту в данной области техники будет понятно, что конфигурация БСУ 104 может варьировать по количеству и типам датчиков. Фактически, может быть использован любой тип датчиков, включая, например, датчик 406 температуры, датчик давления, динамометрический датчик, тензодатчик, датчик на эффекте Холла, датчик вибраций, акселерометр 404, гироскоп, датчик перемещения, индуктивный датчик, пьезорезистивный полупроводниковый микрофон или ультразвуковой датчик, при этом выбор датчика зависит от конкретного отслеживаемого эксплуатационного параметра. В дополнение, датчик может представлять собой выключатель, включая, например, герконовые выключатели и конечные выключатели. Пример другого типа датчика узла считывания, в котором используется тензодатчик, например, датчика контроля состояния ручного тормоза, раскрыт в публикации патента США 2012/0046811 (заявка на выдачу патента США №12/861,713, поданная 23 августа 2010 года), раскрытие которой данной ссылкой включено в настоящий документ.
Электрическая схема предназначена для функционирования БСУ 104. Электрическая схема содержит компоненты и проводку для функционирования и/или получения и обработки сигналов от датчиков. Под этим подразумевают, кроме прочего, аналогово-цифровую схему, центральные процессоры, процессоры, схемные платы, запоминающие устройства, аппаратнореализованное программное обеспечение, контроллеры и другие электрические устройства, необходимые для функционирования акселерометров и датчиков 406 температуры и обработки информации, как дополнительно описано ниже.
Согласно варианту осуществления, изображенному на фиг. 4, схема содержит материнскую плату 402а, содержащую схему связи, антенны и микропроцессор, и дочернюю плату 30, содержащую схему для считывания данных, поступающих от акселерометров 404 и датчиков 406 температуры. Материнская плата 402а, дочерняя плата 402b или датчики могут включать в себя процессор, выполняющий аппаратнореализованное программное обеспечение для предоставления встроенных вычислительных средств, достаточных для осуществления низкоуровневнего анализа данных, и могут принимать параметры от внешних источников, касающиеся того, когда должны быть поданы сигналы тревоги, как описано ниже.
Каждый БСУ 104 также содержит схему для беспроводной связи и долгосрочный источник питания 414 (например, аккумулятор, солнечную батарею, устройство для сбора электроэнергии или внутреннее средство для генерирования электроэнергии), предпочтительно армейский литий-тионилхлорид аккумулятор. Схема также предоставляет функции управления параметрами энергопитания и может включать в себя устройство для сохранения ресурса аккумулятора, которое поддерживает БСУ 104 в дежурном режиме и периодически активирует БСУ 104 для передачи показаний от датчиков.
На фиг. 5 представлен покомпонентный вид второго типа БСУ 104, который предпочтительно устанавливают на корпусе железнодорожного вагона 103. Тип БСУ 104, изображенный на фиг. 5, по существу идентичен типу, изображенному на фиг. 4 (при этом аналогичные позиции использованы для обозначения аналогичных элементов), однако между ними существуют следующие отличия. Во-первых, так как эта модификация БСУ 104 будет установлена на корпусе железнодорожного вагона 103, где на нее, скорее всего, будут воздействовать более плавные ускорения, нет необходимости осуществлять дополнительную механическую фильтрацию, выполняемую механическими фильтрами 410, изображенными на фиг. 4. Таким образом, для крепления указанного узла используют четыре винта, по два с каждой стороны, и в связи с тем, что на этот БСУ воздействуют менее интенсивные ускорения, чем в другой модификации, винты или болты второй модификации могут характеризоваться меньшим диаметром. Во-вторых, изображенный на фигуре вариант осуществления не содержит датчика 406 температуры, хотя могут быть предусмотрены один или несколько датчиков 406 температуры, оснащенные теплопередающим элементом, как рассмотрено выше для первой модификации, проходящим через отверстие в корпусе для считывания необходимой температуры, например, температуры внешней среды. Наконец, хотя эта модификация БСУ 104 содержит акселерометр 404, как и описанный ранее БСУ 104, изображенный на фиг. 4, она предпочтительно будет содержать отличающееся аппаратнореализованное программное обеспечение для обнаружения различных типов событий ускорения, как рассмотрено ниже. Специалисту в данной области понятно, что БСУ обеих модификаций могут также содержать только датчик температуры, при этом не будет необходимости в фильтрации, как описано со ссылками на фиг. 4.
Индивидуальные БСУ 104 устанавливают в вызывающих интерес областях на железнодорожном вагоне 103. В качестве примера, на фиг. 6 изображен БСУ 104 типа, который представлен на фиг. 4, установленный на узел 111 крепления колесного роликового подшипника железнодорожного вагона 103. Блок может быть прикреплен с использованием теплопроводного эпоксидного адгезива, размещаемого между теплопередающим элементом и узлом 111 крепления роликового подшипника для обеспечения хорошей теплопередачи к датчику 406 температуры, и механических крепежных средств, таких как самонарезающие винты 415, для удерживания БСУ 104 в неподвижном состоянии.
Функционирование системы
Рассмотрим фиг. 1 и 2, на которых представлен общий вид предлагаемого нового средства мониторинга показателей и функционирования железнодорожного вагона 103 и поездного состава 109. Указанное средство включает в себя множество датчиков 104, установленных на железнодорожных вагонах 103 в составе 109 для измерения различных эксплуатационных параметров железнодорожного вагона 103, и механизм распределенной обработки сложных событий (РОСС), который является иерархической системой для сбора и анализа данных, а также для обмена данными, событиями и предупредительными сигналами с конечным пунктом назначения, где на их основании могут быть предприняты соответствующие действия.
РОСС несет ответственность за реализацию встроенных вычислительных средств, используемых для вынесения заключений на основе данных, собранных из БСУ 104, БУС 101 и ПЭБШ 102. Предпочтительно, платформа обработки данных распределена среди всех БСУ 104, БУС 101 и ПЭБШ 102, который установлен на локомотиве 108, а также использует облачную инфраструктуру, оптимизированную для тесной работы с поездными ячеистыми сетями 107, в сочетании с модификацией потоков данных для сторонних провайдеров или внешних источников.
Далее рассмотрим фиг. 1, на которой изображена вагонная ячеистая сеть, обозначенная позицией 105. Вагонная ячеистая сеть 105 содержит БУС 101, установленный на железнодорожном вагоне 103, и один или несколько БСУ 104, установленных на этом же железнодорожном вагоне 103. Железнодорожный вагон 103 может состоять из одного или более индивидуальных железнодорожных вагонов 103, которые прочно соединены друг с другом. Вагонная ячеистая сеть 105 является важным компонентом для обработки событий и предупредительных сигналов, связанных с железнодорожным вагоном 103. БУС 101 и группа БСУ 104 совместно работают для сбора и анализа данных, поступающих от датчиков в БСУ 104. БУС 101 управляет работой вагонной ячеистой сети 105, охватывающей железнодорожные вагоны 103, и выполнен с возможностью конфигурирования одного или нескольких БСУ 104 в локальной ячеистой сети для передачи, ожидания сигнала или нахождения в ждущем режиме в точные моменты времени, или изменения параметров функционирования и обнаружения событий БСУ 104.
Далее рассмотрим фиг. 2, на которой представлено схематическое изображение поездной ячеистой сети 107 с двумя железнодорожным вагонами 103, каждый из которых оснащен БУС 101 и группой БСУ 104, установленных рядом с колесными подшипниками железнодорожного вагона 103; железнодорожным вагоном 103, оснащенным только БУС 101 без присоединенных БСУ 104; железнодорожным вагоном 103 без БУС 101; и ПЭБШ 102, установленным на локомотиве 108. БУС 101 и группа БСУ 104, которые установлены на железнодорожных вагонах 103, образуют вагонную ячеистую сеть 105 и обмениваются данными с ПЭБШ 102, установленным на хост-машине или пункте управления, таком как локомотив 108 или другой объект, образуя поездную ячеистую сеть 107. Вагонная ячеистая сеть железнодорожного вагона 103, в состав которой входит только БУС 101 без БСУ, обозначена позицией 118.
Если БСУ 104 обнаруживает аварийное состояние или условие события, как более подробно описано ниже, БСУ 104 направляет сообщение в БУС 101 для осуществления дополнительного анализа и действия, например, для подтверждения или координирования аварийных состояний или условий события, сообщенных одним БСУ 104, с другими БСУ 104 в вагонной ячеистой сети 105. Если сигнал тревоги или событие подтверждается БУС 101, то сообщение посылают в ПЭБШ 102, установленный на объекте предпочтительно с доступом к источнику питания, и/или удаленный центр 120 мониторинга или эксплуатации железной дороги.
БУС 101, установленный на каждом железнодорожном вагоне 103, способен нести необязательный датчик глобальной навигационной спутниковой системы (ГНСС) для определения местоположения, направления и/или скорости железнодорожного вагона 103. Эта информация может быть использована для определения того, необходимо ли БСУ 104 осуществлять поиск определенных типов событий. Например, БСУ 104 бесполезно пытаться обнаружить сход с рельсов, когда поездной состав 109 является неподвижным. Дополнительно, ПЭБШ 102 может послать инструкции в БУС 101 для начала или прекращения поиска определенных типов событий. Кроме того, БУС 101, установленный на каждом железнодорожном вагоне 103, выполнен с возможностью использования встроенных датчиков и/или управления вагонной ячеистой сетью 105, охватывающей железнодорожный вагон 103, для генерирования сообщений, которые должны быть отосланы в хост-машину или пункт управления, такой как локомотив 108.
Обнаружение и сообщение предупреждающих сигналов и событий
Каждый БСУ 104 способен анализировать данные, полученные от его датчиков, при определении того, должно ли сообщение о событии или предупреждающее сообщение совместно с данными быть загружено в следующий более высокий уровень иерархии, которым в этом случае является БУС 101. Касательно показаний, поступающих от акселерометров 404, в каждый БСУ 104 могут запрограммировать множество порогов для пикового и среднеквадратичного уровня значений магнитуды показаний ускорения, полученных от одного или нескольких акселерометров 404. Превышение одного из пикового или среднеквадратичного порога является указанием на возможное аварийное состояние или условие события, при этом осуществляют генерирование и посылку сообщения в БУС 101, находящийся в этой же вагонной ячеистой сети 105. Пороги для каждой модификации БСУ 104 могут быть динамически запрограммированы при помощи команд, сгенерированных внутренне или полученных от БУС 101.
Согласно предпочтительному варианту осуществления в БСУ 104 запрограммированы пороги, которые указывают на определенные типы предупредительных сигналов или событий. В случае БСУ 104, установленных на узлы 111 крепления колесного роликового подшипника, эти блоки могут генерировать сообщения о возможном сходе с рельсов, сообщения о вертикальной ударной нагрузке или сообщение о повреждении колеса, в зависимости от превышенного порога. В случае БСУ 104, установленных на корпусе железнодорожного вагона 103, к примерам генерируемых сообщений относятся сообщения о продольной ударной нагрузке, критическом вертикальном движении железнодорожного вагона, критическом боковом движении железнодорожного вагона, вертикальном качании и боковом качании. Согласно изображенным на фигурах вариантам осуществления БСУ 104 не определяет, существуют ли фактически каждое из возможных условий. Это определение предпочтительно выполняют на следующем более высоком уровне иерархии, например, в БУС 101, который использует показания от множества БСУ 104 для определения того, что фактическое событие произошло. Специалисту в данной области понятно, что различные пороги, позволяющие предположить о возникновении других типов событий, могут быть запрограммированы в БСУ 104.
Касательно датчиков 406 температуры в каждом БСУ 104, которые способны осуществлять измерение температуры поверхности, на которой установлен БСУ 104, и/или температуру внешней среды вокруг БСУ 104, следует отметить, что каждый БСУ периодически сообщает показания температуры в БУС 101. БУС 101 должен осуществить координацию сбора данных температуры из всех БСУ 104, находящихся в вагонной ячеистой сети 105, и, следовательно, период для сообщения показаний температуры, а также синхронизация по времени сообщения данных температуры запрограммированы для каждого БСУ 104 посредством БУС 101.
Каждый БСУ 104 способен определять то, когда сообщить данные, которые могут указывать на возможное аварийное состояние или условие события, в БУС 101. БУС 101 способен осуществлять сбор таких оповещений от каждого БСУ 104, находящегося под его управлением, а также координацию этих данных для осуществления окончательного определения того, действительно ли существует аварийное состояние или условие события. Например, согласно предпочтительному варианту осуществления каждый узел 111 крепления колесного роликового подшипника в железнодорожном вагоне 103 будет характеризоваться наличием БСУ 104, который прикреплен к нему для мониторинга ускорений и температуры. Таким образом, на типичном железнодорожном вагоне 103, содержащем две тележки (колесные тележки), каждая из которых содержит две оси, будут расположены восемь БСУ 104, установленных на узлах 111 крепления колесного роликового подшипника. Дополнительно, в соответствии с предпочтительным вариантом осуществления каждый железнодорожный вагон 103 будет предпочтительно содержать дополнительные БСУ 104, расположенные на каждом конце железнодорожного вагона 103 и прикрепленные непосредственно к корпусу железнодорожного вагона. БУС 101 также может содержать датчики ускорения, датчики температуры или датчики любого другого типа, при этом он может заменить один или несколько БСУ 104, установленных на корпусе железнодорожного вагона 103, или может дополнить набор БСУ 104, которые установлены на корпусе железнодорожного вагона 103. Вагонная ячеистая сеть 105 может включать в себя любое сочетание БСУ 104, включая конфигурацию, в которой БУС 101 является единственным компонентом, установленным на железнодорожном вагоне 103. Дополнительно, БУС 101 может также осуществлять мониторинг БСУ 104, установленных на других железнодорожных вагонах 103, например, когда железнодорожный вагон 103 может состоять из одного или нескольких индивидуальных железнодорожных вагонов 103, которые прочно соединены друг с другом.
Согласно предпочтительному варианту осуществления, логический блок в БУС 101 способен анализировать события ускорения и события изменения температуры, полученные от каждого БСУ 104, находящегося под его управлением, и определять, действительно ли существует аварийное состояние или условие события. Следует отметить, что события ускорения не зависят от событий изменения температуры, и БУС 101 может быть сконфигурирован для анализа только событий ускорения или только событий изменения температуры. Таким образом, БУС 101 и группа БСУ 104, находящихся под его управлением, образуют механизм распределенной обработки событий, который способен определять различные типы событий.
Далее приведено более подробное рассмотрение событий ускорения, которые БУС 101 способен обнаруживать согласно предпочтительному варианту осуществления. Следует отметить, что при определении БУС 101 того, что поступил предупредительный сигнал или произошло какое-либо событие, он посылает сообщение на следующий уровень иерархии, то есть либо в ПЭБШ 102, установленный в любом месте на поездном составе 109, либо за пределы поездного состава 109 в удаленный центр 120 эксплуатации железной дороги, в зависимости от серьезности события и необходимости в немедленной реакции на событие, возможно, путем изменения рабочего состояния поездного состава 109. Ниже приведены примеры событий, которые могут быть проанализированы с использованием описанных выше признаков.
Сход с рельсов - событие схода с рельсов рассматривается в качестве высокоприоритетного типа события, при этом сход с рельсов является примером типа событий, который может быть проанализирован изображенными на фигурах вариантом осуществления. При получении сообщения о сходе с рельсов от БСУ 104, БУС 101 запускает таймер обработки схода с рельсов, а также немедленно генерирует сообщение о возможном сходе с рельсов для ПЭБШ 102. Затем БУС 101 выжидает, сгенерируют ли сообщения о сходе с рельсов какие-либо другие БСУ 104. Если другие БСУ 104 сгенерировали сообщения о сходе с рельсов в течение заданного временного интервала, то все они предположительно были сгенерированы в результате одного физического события, при этом сообщение о сходе с рельсов генерируют и посылают в ПЭБШ 102.
На фиг. 9 представлена блок-схема, на которой представлены условия, при которых событие схода с рельсов заблокировано или разблокировано. В блоке 900 происходит инициализация системы, а в блоке 902 система переходит в состояние ожидания в преддверии движения железнодорожного вагона 103, при этом событие схода с рельсов является заблокированным. Следует отметить, что события схода с рельсов заблокированы, когда железнодорожный вагон 103 является неподвижным. В блоке 904 система выясняет, является ли железнодорожный вагон 103 неподвижным, и, если это справедливо, она возвращается в состояние ожидания в блоке 902. Если железнодорожный вагон 103 находится в движении, то выполнение алгоритма переходит в блок 906, в котором событие схода с рельсов разблокируют. Событие схода с рельсов разблокируют путем посылки БУС 101 некоторого сообщения в каждый из БСУ 104, находящийся под его управлением. В блоке 908 система снова переходит в состояние ожидания; однако событие схода с рельсов теперь разблокировано. В блоке 910 система делает запрос касательно того, обнаружен ли сход с рельсов, и если сход с рельсов не обнаружен, то выполнение алгоритма переходит в блок 914, в котором система делает запрос касательно того, является ли железнодорожный вагон 103 неподвижным. Если железнодорожный вагон 103 движется, то выполнение алгоритма возвращается в блок 908, в котором система находится в состоянии ожидания и событие схода с рельсов разблокировано. Если в блоке 910 обнаружен сход с рельсов, выполнение алгоритма переходит в блок 912, в котором система составляет отчет о сходе с рельсов, и выполнение алгоритма переходит в блок 914, как и ранее. Если в блоке 914 определяют, что железнодорожный вагон 103 снова является неподвижным, событие схода с рельсов блокируют в блоке 916 и выполнение алгоритма возвращается в блок 902, где система ожидает в состоянии, в котором событие схода с рельсов заблокировано.
Вертикальная ударная нагрузка - сообщение о вертикальной ударной нагрузке рассматривают в качестве среднеприоритетного типа события. Когда информацию о событии вертикальной ударной нагрузки получают от БСУ 104, БУС 101 запускает таймер обработки вертикальной ударной нагрузки, который отсчитывает период времени, в течение которого БУС 101 выжидает, поступит ли другая информация о событиях вертикальной ударной нагрузки от других БСУ 104. В зависимости от того, с какой стороны железнодорожного вагона 103 генерируются сообщения о вертикальной ударной нагрузке, можно определить, например, что может иметь место повреждение рельса или другое повреждение железнодорожного пути.
Повреждение колеса - сообщение о повреждении колеса рассматривают в качестве низкоприоритетного типа события. Когда информацию о событии повреждения колеса получают от БСУ 104, БУС 101 начинает ожидать получение информации о дополнительных событиях повреждения колеса от этого же БСУ 104. Таким образом, если БУС 101 получает множество сообщений о повреждении колеса от одного БСУ 104, он может сгенерировать сообщение о повреждении колеса. В таких случаях БУС 101 может послать команду в БСУ 104 о прекращении обнаружения событий повреждения колеса, так как они, скорее всего, будут продолжать повторяться, в результате чего будет сгенерирован шквал сообщений от БСУ 104 к БУС 101. Дополнительно, БСУ 104 будет характеризоваться наличием счетчика, который позволяет определить, отправляет ли он сообщения о повреждении колеса в БУС 101 с определенной интенсивностью. Если эта интенсивность превышена, БСУ 104 прекращает проверку сообщений о повреждении колеса в течение определенного периода времени. По истечению указанного периода времени БСУ 104 выяснит, является ли интенсивность сообщений о повреждении колеса все еще слишком высокой для отправки в БУС 101.
На фиг. 10 представлена блок-схема, на которой представлены условия, при которых события повреждение колеса и вертикальной ударной нагрузки заблокированы или разблокированы. В блоке 1002 происходит инициализация системы, и в блоке 1004 система переходит в состояние ожидания, при этом события заблокированы, так как критическая скорость, требуемая для разблокирования событий еще не достигнута. События повреждения колеса и вертикальной ударной нагрузки разблокируют лишь тогда, когда железнодорожный вагон 103 достигнет определенной критической скорости. Следует отметить, что скорость железнодорожного вагона 103 может быть определена несколькими способами, при этом предпочтительным способом является отправка сообщения из ПЭБШ 102 во все БУС 101 поездного состава 109. В блоке 1006 система выясняет, была ли достигнута или превышена критическая скорость. Критическая скорость является конфигурируемой настройкой системы, как правило, задаваемой каждым индивидуальным пользователем на основе состояния пути и эксплуатационных условий, при этом указанную скорость используют для идентификации того, что поезд движется со скоростью, когда эти данные являются релевантными. Если скорость не была достигнута, то выполнение алгоритма возвращается в блок 1004, в котором система снова переходит в состояние ожидания, при этом события заблокированы. Если в блоке 1006 определили, что критическая скорость была достигнута или превышена, управление алгоритмом переходит в блок 1008, в котором разблокируют события вертикальной ударной нагрузки и повреждения колеса. Затем выполнение алгоритма переходит в блок 1010, в котором система переходит в состояние ожидания, характеризующееся тем, что оба типа событий разблокированы. В блоке 1012, если событие вертикальной ударной нагрузки было обнаружено, выполнение алгоритма переходит в блок 1014, в котором система сообщает о вертикальной ударной нагрузке. В блоке 1016 система выясняет, было ли обнаружено событие повреждения колеса, и если указанное было обнаружено, то она сообщает о повреждении колеса в блоке 1018. В любом случае выполнение алгоритма переходит в блок 1020, в котором система выясняет, имеет ли железнодорожный вагон 103 критическую скорость, необходимую для разблокирования событий. Если это имеет место, то система возвращается в блок 1010, в котором система переходит в состояние ожидания с разблокированными событиями. Если скорость железнодорожного вагона 103 упала ниже критической скорости, то выполнение алгоритма переходит в блок 1022, в котором блокируют события вертикальной ударной нагрузки и повреждения колеса, а затем в блок 1004, в котором система переходит в состояние ожидания, при этом события заблокированы.
Предыдущие события ускорения являются событиями, которые обнаруживают при помощи модификации БСУ 104, которая присоединена к узлу 111 крепления колесного роликового подшипника на железнодорожном вагоне 103. Любое из нижеследующих событий сгенерировано при помощи модификации БСУ 104, которая прикреплена к корпусу железнодорожного вагона 103.
Продольная ударная нагрузка - продольная ударная нагрузка возникает при обнаружении ускорения по длине железнодорожного вагона 103, при этом указанную нагрузку рассматривают в качестве среднеприоритетного типа события. Когда сообщение о продольной ударной нагрузке получают от БСУ 104, БУС 101 запускает таймер, который отсчитывает период времени, в течение которого блок осуществляет поиск других событий продольной ударной нагрузки от других БСУ 104. Как правило, события продольной ударной нагрузки возникают, например, во время процесса сцепления, а также при остановке и трогании поездного состава 109. БУС 101 может скоординировать событие с другими БУС 101 на других железнодорожных вагонах 103, чтобы определить, исходят ли события продольной ударной нагрузки, которые сгенерированы на каждом железнодорожном вагоне 103, от одного и того же физического события.
На фиг. 7 представлена блок-схема, на которой представлены условия, при которых разблокированы события продольной ударной нагрузки. В блоке 700 происходит инициализация системы, и в блоке 702 происходит разблокирование событий продольной ударной нагрузки. Затем выполнение алгоритма переходит в блок 704, в котором система переходит в состояние ожидания с разблокированными событиями и далее к циклу обнаружения. В блоке 706 система определяет, имела ли место продольная ударная нагрузка, и если нет, то выполнение алгоритма переходит в блок 704, в котором система снова переходит в состояние ожидания. Если в блоке 706 была обнаружена продольная ударная нагрузка, то выполнение алгоритма переходит в блок 708, в котором система генерирует и передает сообщение, касающееся ударной нагрузки. После этого выполнение способа возвращается в блок 704, в котором система снова входит в состояние ожидания.
Критическое вертикальное движение транспортного средства - событие критического вертикального движения транспортного средства происходит при обнаружении ускорения в вертикальном направлении железнодорожного вагона 103, и указанное движение рассматривают в качестве среднеприоритетного типа события. Событие обнаруживают, когда ускорение вдоль вертикальной оси превышает порог пикового ускорения. Когда сообщение о критическом вертикальном движении транспортного средства получают от БСУ 104, БУС 101 запускает таймер, который отсчитывает период времени, в течение которого блок осуществляет поиск других событий критического вертикального движения транспортного средства от других БСУ 104. Как правило, события критического вертикального движения транспортного средства возникают, например, из-за проседания пути или изменения модуля упругости подрельсового основания в береговом устое моста. БУС 101 может скоординировать событие с другими БУС 101 на других железнодорожных вагонах 103, чтобы определить, исходят ли события критического вертикального движения транспортного средства, которые сгенерированы на каждом железнодорожном вагоне 103, от одного и того же физического события.
Критическое боковое движение транспортного средства - событие критического бокового движения транспортного средства происходит при обнаружении ускорения в боковом или поперечном направлении железнодорожного вагона 103, и указанное движение рассматривают в качестве среднеприоритетного типа события. Событие обнаруживают, когда ускорение вдоль поперечной оси превышает порог пикового ускорения. Когда сообщение о критическом боковом движении транспортного средства получают от БСУ 104, БУС 101 запускает таймер, который отсчитывает период времени, в течение которого блок осуществляет поиск других событий критического бокового движения транспортного средства от других БСУ 104. Как правило, события критического бокового движения транспортного средства возникают, например, из-за проседания пути или изменения модуля упругости подрельсового основания в береговом устое моста. БУС 101 может скоординировать событие с другими БУС 101 на других железнодорожных вагонах 103, чтобы определить, исходят ли события критического бокового движения транспортного средства, которые сгенерированы на каждом железнодорожном вагоне 103, от одного и того же физического события.
Вертикальное качание - вертикальное качание является состоянием, которое может длиться на протяжении продолжительного периода при определенных динамических условиях, таких как волнообразный износ пути. В БСУ 104, расположенных на каждом конце корпуса железнодорожного вагона 103, направляют инструкции, чтобы они одновременно осуществляли периодическую проверку вертикального качания, что позволяет осуществлять сравнение фаз показаний от каждого БСУ 104. Когда БУС 101 получает сообщение о вертикальном качании, происходит запуск таймера обработки вертикального качания и БУС 101 выжидает, сообщит ли другой БСУ 104 о событии вертикального качания в течение заданного временного интервала. Если множество событий поступили в течение указанного временного интервала, БУС 101 осуществляет анализ полученных сообщений, и если данные указывают на аналогичные периодические колебания на каждом конце железнодорожного вагона 103, то определяют соотношение фаз между событиями, происходящими на каждом конце железнодорожного вагона 103. В случае синфазных колебаний БУС 101 генерирует событие «вертикального раскачивания корпуса» железнодорожного вагона. Когда данные указывают на сдвинутые по фазе колебания, БУС 101 генерирует событие «тангажа корпуса» железнодорожного вагона. В обоих случаях БУС 101 направляет сообщение о вертикальном качании.
Боковое качание - боковое качание является состоянием, которое может длиться на протяжении продолжительного периода при определенных динамических условиях. К факторам, которые вносят вклад в боковое качание, относится следующее: высокий центр тяжести железнодорожных вагонов 103, изношенные тележки (колесные тележки) и изношенный маневровый путь. Обнаружение события бокового качания функционирует аналогично обнаружению событий вертикального качания. Когда БУС 101 получает информацию о событии бокового качания от одного из БСУ 104, установленного одном конце железнодорожного вагона 103 (например, переднем конце), происходит запуск таймера, и, если другое событие получают от другого БСУ 104, установленного на другом конце этого же железнодорожного вагона (например, заднем конце), в течение заданного периода времени, то события сравнивают на предмет соотношения фаз. Если данные указывают на сдвинутые по фазе колебания, то генерируют событие «рыскания корпуса». Однако, если данные указывают на синфазные колебания, то генерируют событие «крена кузова». В обоих случаях БУС 101 направляет сообщение о боковом качании.
На фиг. 8 представлена блок-схема, на которой изображено разблокирование, блокирование и сообщение о событиях вертикального и бокового качания. В блоке 800 осуществляют инициализацию системы, и в блоке 802 система переходит в состояние ожидания с заблокированными событиями. В этом случае события заблокированы, когда скорость железнодорожного вагона 103 является ниже критической скорости. События вертикального и бокового качания разблокированы только тогда, когда скорость железнодорожного вагона 103 превышает критическую скорость. В блоке 804 система выясняет, превышена ли критическая скорость, и если нет, то происходит возврат в состояние ожидания в блоке 802. Однако если критическая скорость была превышена, то в блоке 806 разблокируют события вертикального и бокового качания, и в блоке 808 система переходит к циклу, в котором данные качания посылают в БУС 101, а затем анализируют, чтобы выяснить, произошло ли событие качания. В блоке 810 БУС 101 анализирует данные, а в блоке 812 определяет, было ли обнаружено событие качания. Если событие качания было обнаружено, выполнение алгоритма переходит в блок 814, в котором выполняют отчет о событии. Если событие качания не было обнаружено в блоке 812, выполнение способа переходит непосредственно в блок 816, в котором система снова выясняет, превышает ли скорость железнодорожного вагона 103 критическую скорость. Если скорость железнодорожного вагона 103 все еще является достаточно высокой для разблокирования событий качания, то выполнение алгоритма возвращается в блок 808, и система повторяет указанный цикл. Если скорость железнодорожного вагона 103 упала ниже критической скорости, то выполнение алгоритма переходит в блок 818, в котором блокируют события качания, а затем в блок 802, в котором система переходит в состояние ожидания с заблокированными событиями.
Далее со ссылками на фиг. 4 и 12 будет описана общая модель реализации системы анализа БСУ 104. Согласно изображенному на фигурах предпочтительному варианту осуществления анализируемый сигнал (то, что не было отфильтровано механическим фильтром 410 или заливочной массой) исходит из аппаратного оборудования акселерометра 404 и поступает в один или несколько сенсорных секций 1202, 1208 или 1214. Эти сенсорные секции выбирают данные для дальнейшего анализа при помощи цифровых фильтров 1204, 1210 или 1216, а затем направляют эти данные в анализатор 1206, 1212 или 1218. Выбор данных может быть основан, например, на направлении (например, вертикальные или продольные составляющие), частоте (например, высокочастотные всплески или низкочастотное качание), общей магнитуде (сочетание двух или трех направленных составляющих) или других изменениях собранных данных.
Анализаторы могут использовать множество методик для определения присутствия специфических признаков. К признакам могут относиться, кроме прочего, пики или продолжительность импульсов, среднеквадратичный уровень значения магнитуды или наличие/отсутствие специфических частотных составляющих. Как только признак определен, сообщения передают в модуль 1220 сообщений для доставки в БУС 101. Сенсорная секция может также осуществлять периодическое тестирование, чтобы определить, существует ли еще указанный признак. Если признак все еще существует, то секция может также выбрать между отправкой непрерывных сообщений или отправкой одного сообщения после прекращения существования признака.
Одна возможная реализация системы анализа, изображенной на фиг. 12, показана на фиг. 13. В этом случае акселерометр 404 направляет данные в три сенсорные секции. Первая секция 1302 выбирает данные из продольного направления по длине железнодорожного вагона 103 и использует продольную секцию 1304 для извлечения данных продольной ударной нагрузки. Продольные ударные нагрузки обнаруживают детектором 1306 ударной нагрузки, когда пиковое значение продольных данных превышает порог продольной ударной нагрузки. Вторая секция 1308 выбирает данные из бокового направления поперек железнодорожного вагона 103 и использует боковую секцию 1310 для извлечения данных боковых колебаний. Боковые колебания обнаруживают в детекторе 1312 движений транспортного средства, когда среднеквадратичное значение колебаний превышает порог боковых колебаний. Третья секция 1314 выбирает данные из вертикального направления и использует вертикальную секцию 1316 для извлечения данных вертикальных колебаний. Вертикальные колебания обнаруживают в детекторе 1318 движений транспортного средства, когда среднеквадратичное значение колебаний превышает порог вертикальных колебаний. Каждая из этих сенсорных секций отправляет свои сообщения в модуль 1220 сообщений, который, в свою очередь, направляет эти сообщения в БУС 101.
Другая возможная реализация системы анализа изображена на фиг. 14. В этом случае акселерометр 404 направляет данные в три сенсорные секции. Первая секция 1402 отбирает данные из вертикального направления и использует фильтр 1404 вертикальных данных схода с рельсов для извлечения характерных частот схода с рельсов. События схода с рельсов обнаруживают в детекторе 1406 схода с рельсов на основе среднеквадратичного значения, когда среднеквадратичное значение отфильтрованных данных превышает порог для схода с рельсов. Вторая секция 1408 также выбирает данные из вертикального направления, при этом она использует фильтр 1410 вертикальных данных повреждения колеса для извлечения характерных частот повреждения колеса. Повреждение колеса определяют в детекторе 1412 повреждения колеса на основе среднеквадратичного значения, когда среднеквадратичное значение отфильтрованных данных превышает порог для повреждения колеса. Третья секция 1414 также выбирает данные из вертикального направления и использует фильтр 1416 вертикальной ударной нагрузки для извлечения данных вертикальной ударной нагрузки. Вертикальные ударные нагрузки обнаруживают в детекторе 1418 вертикальной ударной нагрузки на основе пикового значения, когда пиковое значение отфильтрованных данных превышает порог для вертикальной ударной нагрузки. Каждая из этих сенсорных секций отправляет свои сообщения в модуль 1220 сообщений, который, в свою очередь, направляет эти сообщения в БУС 101.
Когда происходит сход с рельсов, колеса одной или нескольких осей сходят с рельсов и движутся вдоль балластной подушки. Так как балластная подушка имеет неровную, жесткую поверхность, на сошедшие с рельс колеса будут воздействовать высокоэнергетические ускорения на протяжении всего схода с рельсов. Согласно предпочтительному варианту осуществления сход с рельсов легко идентифицировать путем расчета среднеквадратичного значения ряда последовательных измерений вертикального ускорения и сравнения полученного результата с порогом. Если БУС получает такие данные от БСУ, расположенных на обеих сторонах одной оси, то это указывает на сход с рельсов. С другой стороны, данные ускорения от одного БСУ, относящегося только к одному колесу, которые обработаны сенсорной секцией 1408, скорее всего, указывают на поврежденное колесо.
БУС 101 также осуществляют сбор данных температуры, поступающих от каждого БСУ 104. Сбор данных температуры от каждого БСУ 104 должен быть синхронизирован для предотвращения конфликтов между БСУ 104 при передаче данных в БУС 101, а также для обеспечения своевременного сравнения и координирования данных температуры из показаний, поступивших от группы БСУ 104. Это обеспечивают путем сохранения данных температуры в циркулирующем буфере, организованных в качестве одного набора данных, содержащего одно показание от каждого датчика 406 температуры БСУ 104. Согласно предпочтительному варианту осуществления, каждый БСУ 104 опрашивает свои датчики 406 температуры один раз в минуту, при этом четыре последовательных образца усредняют каждые 4 минуты. Затем БСУ 104 отправляет сообщение, содержащее 8 усредненных значений последовательных образцов в БУС 101 один раз каждые 32 минуты. БУС 101 хранит двенадцать образцов в своем циркулирующем буфере для каждого датчика 406 температуры, однако специалисту в данной области техники будет понятно, что могут быть использованы другие интервалы отбора образцов и размеры буфера. Следует понимать, что БСУ 104 могут иметь более одного датчика 406 температуры. После того как получено каждое сообщение о температуре, самый старый набор данных в циркулирующем буфере удаляют. При завершении составления набора данных, данные температуры исследуют на предмет любых значимых тенденций или событий изменения температуры, а затем осуществляют сброс данных, так что данные температуры используют только один раз. По мере получения более новых сообщений о температуре, буфер заполняется данными, так что новые данные записываются поверх наиболее старых слотов. Следует отметить, что БСУ 104 не анализирует данные температуры на предмет специфических событий, а скорее просто сообщает их в БУС 101. БУС 101 исследует данные температуры для выявления тенденций и предоставляет отчет в случае обнаружения определенных порогов. Следует отметить, что анализ температуры осуществляют только при движении поездного состава 109 и блокируют, когда поездной состав 109 является неподвижным. Следовательно, БСУ 104 не будут собирать или сообщать данные температуры кроме случаев, когда поездной состав 109 движется.
В следующей таблице приведен список сигналов тревоги и предупреждений, генерируемых статистическим анализом, выполняемым БУС 101 на основе данных температуры.
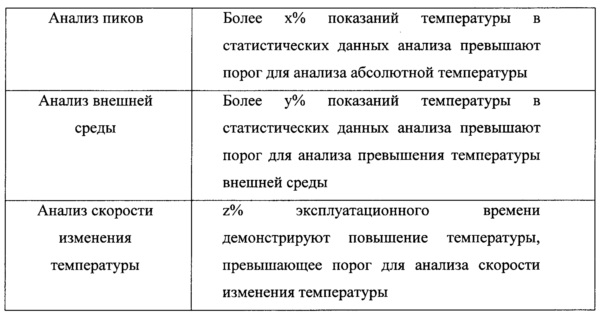
Использование переменных х, y и z в приведенной выше таблице указывает на то, что эти числа могут быть настроены в зависимости от предпочтений пользователя или оператора. В качестве примера функционирования анализа пиков рассмотрим следующее: если х (согласно настройке пользователя, например, 20, 25 или 30) процентов показаний температуры подшипника в течение некоторого периода времени превышают порог для анализа абсолютной температуры, то может быть послан сигнал тревоги или предупреждение. В качестве примера практичности выполнения различных анализов рассмотрим следующее: существует возможность того, что анализ внешней среды, выполняемый в отношении греющегося подшипника, когда поезд движется в очень жарких погодных условиях, может не выявить проблемы, которая фактически имеет место, тогда как анализ пиков, который следит только за температурой подшипника, выдаст предупреждение или сигнал тревоги. С другой стороны, в очень холодную погоду анализ пиков может не выявить проблемы с греющимся подшипником из-за холодных погодных условий, охлаждающих подшипник, тогда как анализ внешней среды определит неисправность. В качестве примера анализа скорости изменения температуры рассмотрим следующее: когда железнодорожный вагон находится в неподвижном состоянии, температура неисправного подшипника будет равняться температуре внешней среды, но как только железнодорожный вагон начнет движение, неисправный подшипник может нагреться быстрее остальных подшипников железнодорожного вагона и, следовательно, в течение большего процента эксплуатационного времени будет превышать пороговую скорость изменения температуры.
Как и в случае событий ускорения, БСУ 104 также способны проверять события изменения температуры и сообщать, когда измеренная температура превышает определенные пороги. В приведенной ниже таблице содержится перечень таких связанных с температурой сигналов тревоги и событий, которые могут быть немедленно предоставлены.


Первые четыре сигнала тревоги и предупреждения в приведенной выше таблице основаны на данных, которые предпочтительно собраны отдельными БСУ, и не требуют проведения каких-либо анализов, отличных от анализа превышения порога, при этом указанные сигналы и предупреждения могут быть инициированы БСУ, который осуществляет сбор данных. Для последнего сигнала тревоги, а именно сигнала тревоги, обусловленном различием температур, необходимы данные по меньшей мере из двух БСУ, расположенных на узлах крепления подшипников с противоположных сторон оси, и, следовательно, анализ и выдача сигнала тревоги будут предпочтительно выполняться БУС.
На фиг. 11 представлена блок-схема, на которой показана обработка событий, связанных с измерением значений температуры колесных подшипников, установленных на железнодорожном вагоне 103. В блоке 1100 осуществляют инициализацию системы, и в блоке 1102 система переходит в состояние ожидания, при этом события мониторинга температуры заблокированы. В этом случае события заблокированы, когда железнодорожный вагон 103 является неподвижным. В блоке 1104 система выясняет, движется ли железнодорожный вагон, и если нет, то выполнение алгоритма возвращается в блок 1002, где указанная система снова переходит в состояние ожидания с заблокированными событиями. Если железнодорожный вагон движется, то выполнение алгоритма переходит в блок 1106, в котором разблокируют события мониторинга температуры. Затем система переходит к блоку 1108, где она входит в цикл, в ходе которого происходит проверка событий. Выполнение алгоритма переходит в блок 1110, где система снова выясняет, движется ли железнодорожный вагон 103. Если железнодорожный вагон 103 не движется, то выполнение алгоритма переходит в блок 1112, в котором блокируют события мониторинга температуры, а затем в блок 1102, в котором система переходит в состояние ожидания с заблокированными событиями. Если в блоке 1110 определяют, что железнодорожный вагон 103 все еще движется, выполнение алгоритма переходит в блок 1114, в котором система выясняет, доступен ли набор измерений температуры. Если набор является недоступным, выполнение алгоритма возвращается в блок 1108, в котором система находится в состоянии ожидания с заблокированными событиями. Если набор измерений температуры доступен в блоке 1114, то выполнение алгоритма переходит в блок 1116, в котором БСУ 104 передает набор измерений температуры в БУС 101. В блоке 1118 БУС 101 выполняет анализ измерений температуры, включая все измерения, находящие в циркулирующем буфере, и в блоке 1120 принимает решение, превышен ли порог температуры. Если порог не превышен, то выполнение алгоритма возвращается в блок 1108, в котором система находится в состоянии ожидания с разблокированными событиями. Если температурный порог превышен, то система сообщает измерения температуры в блоке 1122, а затем возвращается в блок 1108, в котором снова система находится в состоянии ожидания с разблокированными событиями.
БУС 101 также обнаруживает долгосрочные тенденции и хранит данные в отношении тенденций для анализа состояния подшипника. Для каждого подшипника, наблюдение за которым осуществлял БСУ 104 в вагонной ячеистой сети 105, собраны приведенные ниже статистические данные:
1. Общее количество допустимых показаний температуры;
2. Сумма допустимых показаний температуры;
3. Сумма допустимых показаний температуры в квадрате;
4. Количество показаний температуры, превышающих порог для абсолютной температуры;
5. Количество показаний температуры, превышающих порог для температуры внешней среды; и
6. Количество случаев регистрации скорости изменения температуры, превышающей порог для скорости нагревания.
Статистические данные температуры подшипника накапливают на каждодневной основе в циркулирующем буфере, который может хранить тридцать два набора данных, в результате чего возможно проведение анализа тенденций за 32-дневный период. Механизм РОСС управляет началом периода времени, в течение которого статистические данные накапливают в качестве нового набора статистических данных, при этом наиболее старый набор удаляют. Как правило, механизм обработки событий сконфигурирован для генерирования анализа один раз в день.
Собранные статистические данные могут быть использованы для расчета информации, которая демонстрирует тенденции износа подшипников. Согласно предпочтительному варианту осуществления БУС 101 предоставляет отчет по запросу о следующих величинах для каждого колесного подшипника:
a. Средняя температура подшипника;
b. Изменение температуры подшипника;
c. Процент показаний температуры подшипника, которые превышают абсолютный порог;
d. Процент показаний температуры подшипника выше температуры внешней среды, которые превышают порог; и
e. Процент измерений, в которых скорость повышения температуры подшипника превышает порог.
Поездная ячеистая сеть обозначена на фиг. 2 и 3 позицией 107. Поездная ячеистая сеть 107 охватывает поездной состав 109 и содержит ПЭБШ 102, установленный в хост-машине или пункте управления, таком как локомотив 108, или другой объект с доступом к источнику питания, и один или несколько БУС 101, каждый из которых принадлежит поездной ячеистой сети 107 и также соответствующей вагонной ячеистой сети 105, если присутствует один или несколько БСУ 104, или соответствующей вагонной ячеистой сети или сети 118 для железнодорожных вагонов 103 с БУС 101, но без БСУ 104 (см. фиг. 2). Отметим, что в поездном составе 109 также могут быть железнодорожные вагоны 103 без установленных на них БУС 101, что обозначено позициями 119 на фиг. 2. Таким образом, в этом случае БУС 101 могут принадлежать двум ячеистым сетям, а именно вагонной ячеистой сети 105 (если железнодорожный вагон 103 оснащен одним или несколькими БСУ 104) и поездной ячеистой сети 107. Кроме того, каждый БУС 101 необязательно управляет соответствующей ему вагонной ячеистой сетью 105. На фиг. 3 представлен случай, в котором поездная ячеистая сеть 107 состоит из трех БУС 101, два из которых являются частью вагонных ячеистых сетей 105, а один из которых расположен на железнодорожном вагоне 103 (позиция 118), в котором нет подключенных БСУ 104.
Поездная ячеистая сеть 107 является оверлейной ячеистой сетью для обеспечения маломощной двусторонней связи со всем поездным составом 109 и с ПЭБШ 102, который установлен на локомотиве 108. Оверлейная поездная ячеистая сеть 107 состоит из беспроводных приемопередатчиков, встроенных в БУС 101 на каждом железнодорожном вагоне 103. Каждый БУС 101 способен инициировать передачу сообщения по поездной ячеистой сети 107 или ретранслировать сообщение от другого БУС 101 или к другому БУС 101. Оверлейная поездная ячеистая сеть 107 создана независимо от вагонных ячеистых сетей 105, созданных в каждом железнодорожном вагоне 103 поездного состава 109, и функционирует независимо от них.
Двусторонний ПЭБШ 102 управляет поездной ячеистой сетью 107 и передает предупредительные сигналы, поступающие от БУС 101, установленных на отдельных железнодорожных вагонах 103, в хост-машину или пункт управления, такой как локомотив 108, при этом действиями на основании предупредительных сигналов или отчетов о событиях может управлять автоматизированная система или оператор. Локомотив 108 может содержать пользовательский интерфейс для получения и отображения предупреждающих сообщений, сгенерированных поездной ячеистой сетью 107 или любой отдельной вагонной ячеистой сетью 105. Двусторонний ПЭБШ 102 способен принимать множество предупредительных сигналов или событий от БУС 101, установленных на отдельных железнодорожных вагонах 103, и может выводить заключения о специфических аспектах функционирования поездного состава 109.
Двусторонний ПЭБШ 102 также способен обмениваться информацией с внешним удаленным центром 120 эксплуатации железной дороги, системой обработки данных или другой системой управления поездом. Такой канал связи обозначен на фиг. 3 позицией 122, при этом для создания этого канала могут быть использованы средства сотовой связи, средства связи на основе ЛС, средства связи на основе стандарта Wi-Fi, средства связи на основе стандарта Bluetooth, средства спутниковой связи или другие средства. Этот канал может быть использован для отправки предупредительных сигналов за пределы поездного состава 109 во время его эксплуатации.
Следует понимать, что выше были описаны новые системы, устройства и способы. Кроме того, понятно, что настоящее изобретение не ограничено описанным выше вариантами осуществления и приведенными выше иллюстрациями, а ограничено лишь объемом, определяемым приложенной формулой изобретения.




Многокассетный режущий инструмент и расточный узел для колес подвижного состава
Опорное кольцо железнодорожного подшипника
Уплотнение роликового подшипника
Узел кольцевой прокладки роликового подшипника (варианты)
Коготь железнодорожной сцепки, имеющий внутреннюю опорную конструкцию
Износостойкая пластина тормозной балки тележки железнодорожного вагона
Прибор системы безопасности железнодорожной цистерны
Система управления поездом и железнодорожным депо
Фрикционный клин тележки железнодорожного вагона
Фрикционный клин тележки железнодорожного вагона
Система управления поездом и железнодорожным депо
Система и способ формирования железнодорожного состава и управления им

