Результат интеллектуальной деятельности: Способ перехвата интенсивно маневрирующих высокоскоростных воздушно-космических объектов
Вид РИД
Изобретение
Изобретение относится к системам наведения на воздушные цели, в частности на высокоскоростные и интенсивно маневрирующие цели.
Среди новых видов воздушно-космической техники, к которым относятся сверхманевренные (СМЛА), гиперзвуковые (ГЗЛА), беспилотные (БЛА) летательные аппараты (ЛА), сверхзвуковые крылатые и нестратегические баллистические ракеты, наиболее проблемными для перехвата являются ГЗЛА, что в первую очередь обусловлено следующими причинами:
сложным непредсказуемым характером траекторий, в законе изменения которых содержатся высокие производные с изменяющимися знаками, что делает невозможным использование традиционных способов обнаружения, сопровождения и наведения в упрежденную точку встречи;
большим разбросом высот (до десятков километров) и скоростей, вплоть до околокосмических;
заведомым несоответствием динамических свойств ГЗЛА и перехватчиков, что ограничивает зону перехвата только передней полусферой, предопределяющим невозможность использования прямых методов наведения.
Качественно траектория полета ГЗЛА в вертикальной плоскости показана на фиг. 1.
В качестве прототипа был выбран один из наиболее распространенных методов - метод пропорционального наведения (МПН) [1].
В этом методе требуемое поперечное ускорение в плоскости управления должно быть пропорционально угловой скорости линии (ЛВ) визирования и скорости сближения ЛА с целью:

Недостатками МПН является отсутствие учета погрешности сопровождения цели по углу и плохая управляемость на больших расстояниях. Кроме того, прямолинейность траектории наведения для МПН реализуется лишь при наведении на неманеврирующие цели.
Проведенные исследования показали, что можно реализовать перехват ГЗЛА при условии, что в законе наведения перехватчика используются высокие (до четвертого порядка) производные угловых координат [2].
Однако для информационного обеспечения такого способа наведения практически невозможно синтезировать фильтр, устойчиво формирующий оценки угла, угловой скорости и ее первой и второй производных, поскольку измеряется только угол.
В связи с этим целесообразно синтезировать способ наведения, который обеспечивал бы перехват ГЗЛА без знания высоких производных.
Эта задача может быть решена на основе математического аппарата синтеза нелинейного управления [3], который позволяет для n-мерной системы

предназначенной для отработки n-мерного процесса

сформировать r-мерный (r ≤ n) сигнал управления

оптимальный по минимуму квадратично-биквадратного функционала качества

где Δx = xT - xY;
K - матрица штрафов за величину сигналов управления;
Q - матрица штрафов за точность приближения хУ к хТ;
Р - симметричная матрица, определяющая вес нелинейной составляющей (6) в составе уравнения (4).
Здесь и далее для упрощения записей опущена зависимость векторов и матрицы М от времени t.
Рассмотрим процедуру синтеза способа наведения перехватчика на ГЗЛА при условии, что наводимый летательный аппарат аппроксимируется моделью

а модель движения ГЗЛА кинематическими уравнениями [1]

В (7), (8) ϕу, ϕт - текущие и требуемые значения пеленга цели с перехватчика, а ωу, ωт - угловых скоростей изменения ϕу и линии визирования цели с перехватчика;
b и Т - коэффициент передачи ЛА и постоянная времени в плоскости управления;
jу - поперечное ускорение, выполняющее роль сигнала управления;
Д и  - дальность до цели и скорость ее изменения;
- дальность до цели и скорость ее изменения;
jт - поперечное ускорение цели;
 и
и  - центрированные гауссовские возмущения, действующие на перехватчик и ГЗЛА.
- центрированные гауссовские возмущения, действующие на перехватчик и ГЗЛА.
Необходимо отметить, что манипулируя законом изменения jт в (8), можно реализовать траекторию полета ГЗЛА любой сложности.
Геометрические соотношения между целью и перехватчиком показаны на фиг. 2.
Необходимо по моделям (7) и (8) найти по правилу (4) сигнал jу управления перехватчиком, оптимальный по минимуму функционала

где 
Поставив в соответствие (7) - (9) с (2), (3) и (5), получим
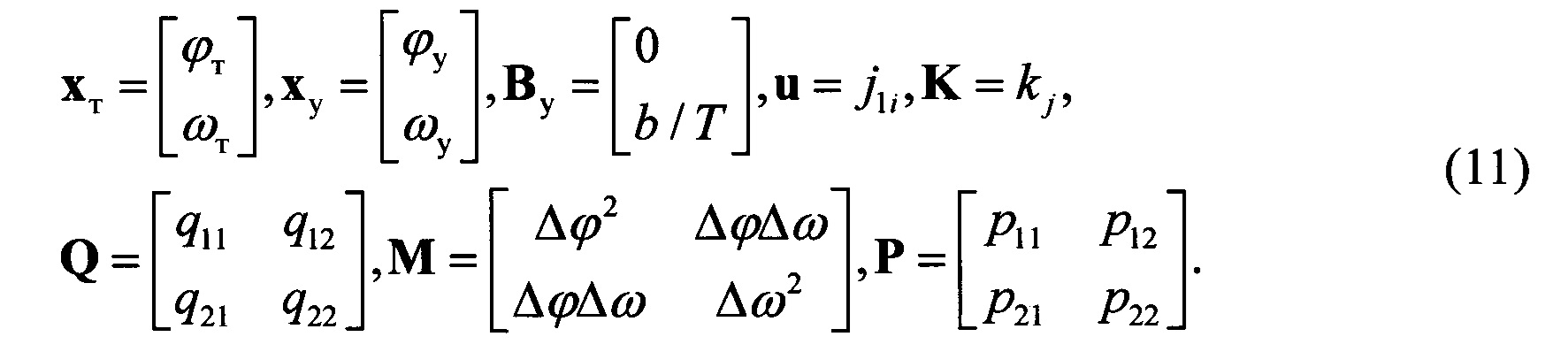
Тогда на основе (4):
где в соответствии с выводами теоремы статистической эквивалентности

формируются на основе оптимальных оценок  ,
,  и
и  ,
, 
Анализ соотношений (12) и (13) позволяет сделать следующие выводы.
Способ (12) характеризует систему наведения с нелинейным управлением, в котором наряду с линейной компонентой, определяемой первыми двумя слагаемыми, используется и нелинейная компонента, определяемая третьим, четвертым и пятым слагаемыми.
Сигнал управления зависит не от абсолютных значений коэффициентов штрафов, а от их соотношений q12/kj, q22/kj и р11/kj, р21/kj, р22/kj, что существенно облегчает процедуру расчета сигналов управления.
Сигнал управления зависит не только от абсолютных значений Δϕ и Δω, но и от их сочетаний по величине и знаку.
Для получения сигнала управления не требуется знания производных угловых скоростей [2], а достаточно иметь оценки  ,
,  и
и  ,
,  , что не накладывает ограничений на возможность его формирования.
, что не накладывает ограничений на возможность его формирования.
Технический результат, который может быть получен от использования предлагаемого изобретения, заключается в обеспечении высокой устойчивости и точности перехвата интенсивно маневрирующих высокоскоростных целей.
Технический результат достигается за счет использования закона (12) для управления наводимым ЛА на цель, в котором в различных сочетаниях учитываются ошибки наведения по углу и угловой скорости, что и отличает его от прототипа (1).
Сущность предлагаемого изобретения заключается в разработке способа формирования сигнала управления, при котором наводимый на цель ЛА управляется по закону (12), который формируется с использованием оценок  ,
,  и
и  ,
,  , полученных от бортовых измерителей либо от других источников информации.
, полученных от бортовых измерителей либо от других источников информации.
Принципы функционирования предложенного способа для одной плоскости поясняются структурной схемой, проиллюстрированной фигурой 3, на которой функциональные блоки перехватчика объединены пунктирной линией. На этой фигуре
1 - измерители углов, поступающих в фильтр 2;
2 - фильтр, формирующий оценки  и передающий их на усилители 3-7;
и передающий их на усилители 3-7;
3 - усилитель, формирующий на основе оценок  сигнал
сигнал  и передающий его на сумматор 8;
и передающий его на сумматор 8;
4 - усилитель, формирующий на основе оценок  сигнал
сигнал
 и передающий его на сумматор 8;
и передающий его на сумматор 8;
5 - усилитель, формирующий на основе оценок  сигнал
сигнал
 и передающий его на сумматор 8;
и передающий его на сумматор 8;
6 - усилитель, формирующий на основе оценок  сигнал
сигнал
 и передающий его на сумматор 8;
и передающий его на сумматор 8;
7 - усилитель, формирующий на основе оценок 
сигнал  и передающий его на сумматор 8;
и передающий его на сумматор 8;
8 - сумматор, получающий на вход сигналы из усилителей 3-7, формирующий сигнал управления jу и передающий его на органы управления ЛА 9;
9 - органы управления ЛА, получающие на вход сигнал управления jу и изменяющие пространственное положение ЛА;
10 - цель.
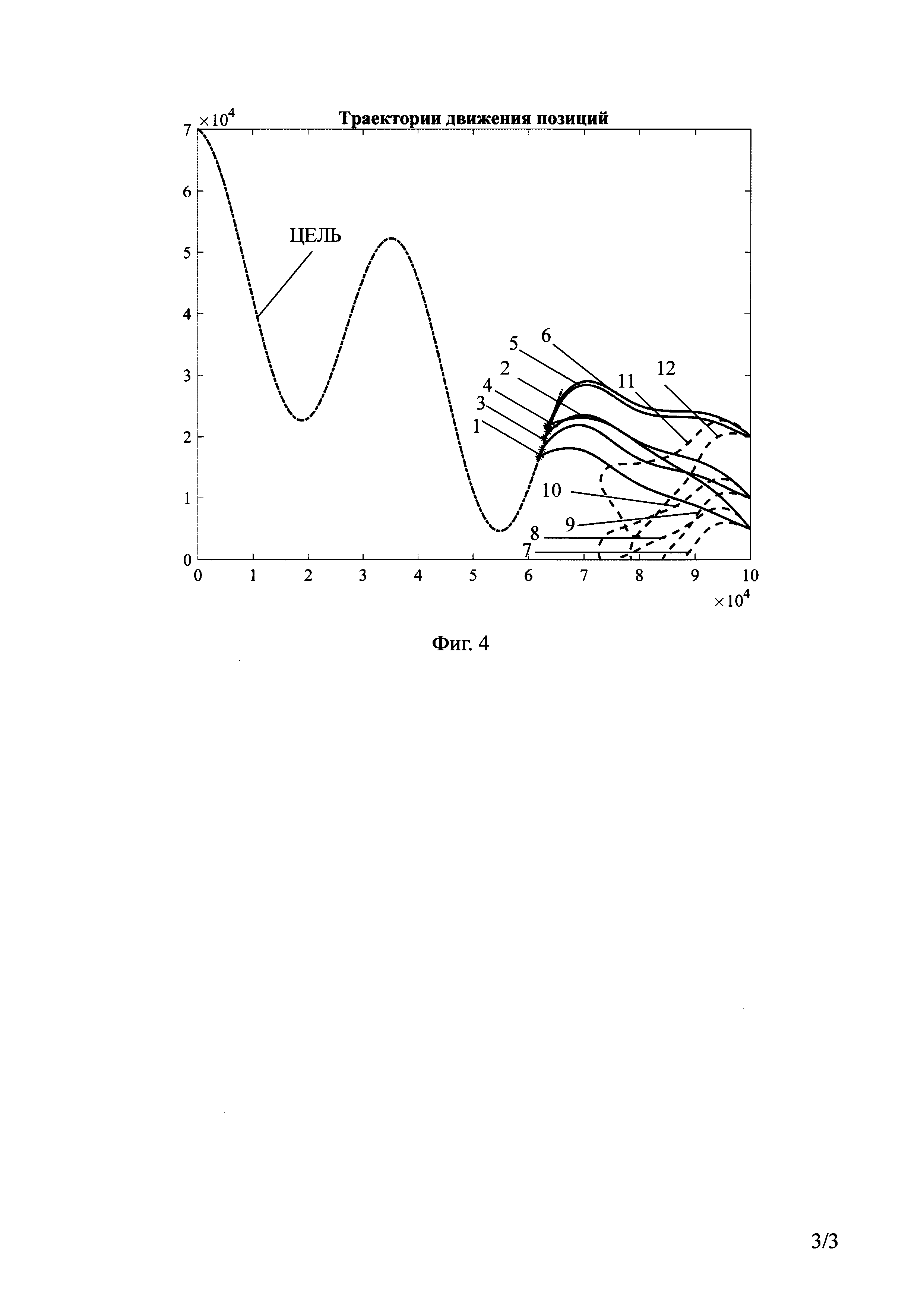
Работоспособность предложенного способа наведения оценивалась по результатам моделирования полета ГЗЛА в вертикальной плоскости по сложному закону, который качественно показан на фиг. 4, и полета перехватчика (7) с управлением (12) в широком поле начальных условий применения.
Эффективность предложенного нового метода наведения (НМН) оценивалась по величине ошибок управления по углу Δϕ, а также по величинам текущего промаха h и требуемого поперечного ускорения jу наводимого ЛА в процессе сравнения с перехватом по наиболее распространенному [1] методу пропорционального наведения (МПН):

Траектории ГЗЛА и перехватчиков, управляемых по НМН и МПН, показаны на фиг. 4.
На этой фигуре приняты следующие обозначения:
1-6 - наведение по НМН (сплошная линия);
7-12 - наведение по МПН (штриховая линия);
1 и 2, 7 и 8 - начальная высота перехватчика 5 км;
3 и 4, 9 и 10 - начальная высота перехватчика 10 км;
5 и 6, 11 и 12 - начальная высота перехватчика 20 км;
1, 3, 5, 7, 9, 11 - начальная ошибка наведения Δϕ = -15°;
2, 4, 6, 8, 10, 12 - начальная ошибка наведения Δϕ = 15°.
Из фиг. 4 видно, что перехват по НМН реализуется во всем поле высот применения с достаточно большими первоначальными угловыми ошибками, в то время как при использовании традиционного МПН перехват не выполняется.
На фиг. 5 и 6 показаны соответствующие текущие ошибки наведения по углу и текущие промахи.
Из этих фигур видно, что НМН реализует существенно более высокую точность наведения, обеспечивая сведение угловых ошибок и промахов практически к нулю, несмотря на очень сложный закон движения ГЗЛА, в то время как использование МПН приводит к их нарастанию, свидетельствуя о невозможности перехвата.
Из фиг. 7 видно, что перехват по НМН выполняется в реализуемом на практике диапазоне поперечных ускорений, в то время как при МПН требуются очень большие, не реализуемые на практике значения ускорений.
В заключение необходимо отметить, что предлагаемое изобретение может быть реализовано в существующих самолетах и ракетах.
Источники информации
1. Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самонаведения. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003 - 389 с.
2. Меркулов В.И., Соколов Д.А. Устранение несоответствия динамических свойств подсистем в процессе их совместного функционирования в составе сложных технических систем управления. // Динамика сложных систем. 2016. №1. С. 26-32.
3. Меркулов В.И. Оптимизация систем управления по локальным квадратично-биквадратным функционалам качества. // Информационно-измерительные и управляющие системы. 2016. №11. С. 27-33.


Способ оценки эффективности радиоэлектронных средств в условиях действия непреднамеренных помех и система для его реализации
Система информационного обеспечения скрытного наведения летательных аппаратов в зоне обнаружения импульсно-доплеровской рлс
Способ автоматического группового целераспределения истребителей с учетом приоритета целей
Приемная мультипликативная фар
Способ сканирования луча гибридной зеркальной антенны
Устройство для измерения амплитудно-фазовых шумов источников свч радиоимпульсного сигнала с высокой скважностью передатчиков высококогерентных систем локации и связи
Радиометр влагомер
Способ управления летательным аппаратом
Облучатель гибридной зеркальной антенны поляриметрического космического радиолокатора
Способ определения экстраполированных значений дальности и скорости сближения летательного аппарата с радиолокационным объектом
Способ управления летательным аппаратом
Способ определения экстраполированных значений дальности и скорости сближения летательного аппарата с радиолокационным объектом
Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах
Способ обнаружения зараженности атмосферы токсичными химическими веществами пассивными инфракрасными спектрометрами дистанционного действия с учетом изменения направления ветра
Способ оценки эффективности интегрированных радиоэлектронных комплексов в условиях действия непреднамеренных помех и система для его реализации
Способ наведения инерционного летательного аппарата с учетом несоответствия динамических свойств цели и перехватчика
Сверхширокополосный многочастотный радиолокатор с активной фазированной антенной решеткой и пониженным уровнем боковых лепестков в сжатом сигнале
Способ управления группой беспилотных летательных аппаратов с учетом степени опасности окружающих объектов

