Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСТРАПОЛИРОВАННЫХ ЗНАЧЕНИЙ ДАЛЬНОСТИ И СКОРОСТИ СБЛИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РАДИОЛОКАЦИОННЫМ ОБЪЕКТОМ
Вид РИД
Изобретение
Изобретение относится к радиолокации, в частности, может использоваться в радиолокационных системах (РЛС), обеспечивающих определение дальности до радиолокационных объектов (РЛО) и скорости сближения с ними.
В радиолокации наряду с формированием текущих оценок дальности до РЛО и скорости сближения с ними достаточно часто необходимо определять экстраполированные (прогнозируемые) значения дальности и скорости сближения в моменты времени, находящиеся за пределами интервала наблюдения и основанные на данных более ранних моментов времени.
Различают следующие виды экстраполяции: экстраполяция в заданную точку, экстраполяция на заданное число шагов, экстраполяция на фиксированный интервал [1].
Известен ряд способов определения экстраполированных значений дальности и скорости сближения с использованием алгоритмов фильтрации во временной и частотной областях. При применении временной фильтрации этапу прогнозирования предшествует итеративная процедура построения математической модели текущего поведения дальности во времени, основанная на теории идентификации и оценивания [2, с. 116-123]. Затем на этапе прогнозирования полученные оценки параметров математической модели используются в вычислительных алгоритмах для определения экстраполированных значений дальности и скорости. Наиболее известный способ экстраполяции параметров полиномиальной траектории по предварительно полученным оценкам этих параметров на момент последнего измерения применительно к решению задачи экстраполяции дальности и скорости приведен в [3, с. 199-200] и в [4, с. 156-158].
При применении частотной фильтрации на основе априорно заданной математической модели поведения дальности находится передаточная функция фильтра Винера, с помощью которого осуществляется экстраполяция дальности [5, с. 118-131, 151-159].
Таким образом, для реализации известных способов экстраполяции принципиально необходимым является знание математической модели поведения дальности и скорости во времени. Учитывая многообразие условий практического применения РЛС, разработаны различные математические модели, характеризующие временные процессы изменения дальности. Поскольку условия применения одной и той же РЛС при ее работе могут существенно изменяться, то для эффективного функционирования РЛС следует использовать ту математическую модель, которая в максимальной степени соответствует конкретному варианту применения. Для этого необходимо непрерывно отслеживать складывающуюся ситуацию в контролируемом РЛС пространстве с целью формирования ситуационной осведомленности об окружающей обстановке, что достаточно сложно обеспечить на практике.
Технической задачей изобретения является разработка способа определения экстраполированных значений дальности и скорости сближения летательного аппарата (ЛА) с РЛО по измерениям дальности, не требующего использования математических моделей относительного движения ЛА и РЛО, что позволит расширить арсенал известных способов экстраполяции дальности и скорости сближения.
Техническим результатом предлагаемого способа (изобретения) является реализация возможности определения экстраполированных значений дальности до РЛО и скорости сближения с ним на основе использования информации о спектрах последовательностей отсчетов дальности (по измерениям дальности). Использование спектральных характеристик для решения задач экстраполяции основывается на том, что в отличие от традиционных подходов к экстраполяции они характеризуют сигнал в целом и в каждом отсчете спектра присутствует информация о закономерностях динамики сигнала на доступном наблюдению отрезке предыстории. Предлагаемый способ снимает требования по точности соответствия моделей изменения во времени дальности и скорости сближения реальному процессу, предъявляемые в известных способах. Поскольку заявляемый способ не требует знания математической модели поведения во времени дальности, то он не имеет прототипа среди известных способов экстраполяции дальности и скорости сближения. Общим признаком с известными способами является лишь наличие процедуры формирования отсчетов дальности до РЛО.
Сущность предлагаемого способа определения экстраполированных значений дальности и скорости сближения на основе использования информации о спектрах заключается в том, что после излучения последовательности радиоимпульсов, приема отраженных от РЛО сигналов, фильтрации их от шумов, преобразования в цифровую форму дальнейшую обработку осуществляют с применением алгоритма полигармонической экстраполяции [6, с. 120-121] и Чебышевского спектрального дифференцирования [7, с. 78], существо которых сводится к следующему.
Задают: N-количество точек быстрого преобразования Фурье (БПФ), протяженность по времени t отрезка реализации Т; М (число Чебышевских точек М+1); τ-время упреждения.
Способ полигармонической экстраполяции состоит в том, что для экстраполяции дальности выполняют следующие действия:
- формируют N значений дальностей по принятым сигналам на периоде Т. Затем берется другой отрезок с периодом Т, сдвинутый относительно первого на время τ, и также формируют N значений дальностей. Полученные значения дальностей запоминают в виде массива, причем массив формируют так, что первые N значений дальностей (то есть принятых в течение первого периода Т [t-T-τ, t-τ]) запоминают в ячейках первого столбца этого массива, следующие N значений дальностей, полученных в течение второго периода Т [t-T, t], запоминают в ячейках второго столбца массива;
- значения дальностей, находящихся в 1-м и 2-м столбцах массива, подвергают операции БПФ на N точек, и результаты операции БПФ SI(ω) и SII(ω) запоминают. Каждое из полученных чисел этого массива представляет собой комплексную амплитуду спектра дальности;
- знание спектров SI(ω) и SII(ω) позволяет найти комплексный коэффициент передачи Е(ω) некоторого гипотетического четырехполюсника, обеспечивающего преобразование спектра при переходе от первой реализации ко второй, сдвинутой на интервал τ

Учитывая сохранение закономерностей процесса на интервале прогноза и на интервале предыстории, можно утверждать, что коэффициент преобразования спектра отрезка реализации при переходе от второй реализации к третьей, смещенной относительно второй на τ в область прогноза, изменится незначительно относительно коэффициента преобразования спектра при переходе от первого отрезка реализации ко второму;
- вычисляют значения комплексных амплитуд спектра последовательностей отсчетов дальности реализации, смещенной относительно второй на τ в область прогноза, на основании упомянутого утверждения

- по вычисленному спектру способом обратного БПФ определяют оценки отсчетов на интервале [t-T+τ, t+τ], который частично перекрывается с областью предыстории, а частично лежит в области прогноза [t, t+τ];
- оцененные значения дальности до РЛО Дэ в области прогноза [t, t+τ] выдают потребителям информации.
Типовые алгоритмы спектрального дифференцирования на равномерно распределенной сетке обеспечивают формирование точных оценок только для гладких периодических функций. В то же время информация о дальностях на интервале Т представляет собой негладкую функцию, когда она периодически продолжена. В такой ситуации целесообразно оценки дальностей формировать в неравномерно расположенных точках по дискретно поступающим равномерно измерениям.
Рассмотрим предлагаемый метод в приложении к определению скорости сближения при условии, что измерения дальности приходят с периодом To.
В общем случае точки должны быть распределены с плотностью (на единицу длины) [7, с. 42]

Здесь М - количество точек; х ∈ [-1, 1] - аргумент сетчатой функции.
Для предлагаемой системы обработки сигналов было выбрано Чебышевское спектральное дифференцирование, при котором х=cos θ и точки, удовлетворяющие (3),

Чебышевские точки xj нумеруются справа налево.
Из полученных N оценок отсчетов дальности на периоде Т, который частично лежит в области прогноза, формируют М+1 значений отсчетов в Чебышевских точках До, …Дм, причем номера n полученных отсчетов, соответствующие j, задают формулой

где символ INT означает операцию округления до целого полученного в фигурных скобках числа, cos(jπ/M)=xj.
Расширим эти отсчеты до вектора Д длиной 2М с Д2м-k-=Дk, 
Значения отсчетов Д подвергают операции БПФ на 2М точек, и результаты операции БПФ запоминают в этом массиве. Каждое полученное число этого массива  представляет собой комплексную амплитуду спектра сигнала с аргументом
представляет собой комплексную амплитуду спектра сигнала с аргументом 
Каждое m-e значение комплексных амплитуд умножают на im, где i - мнимая единица, (за исключением m=М, для которого соответствующее произведение полагают равным нулевому значению), т.е. формируют значения комплексных амплитуд спектра производной сетчатой функции по θ, которые запоминают в соответствующих ячейках упомянутого массива.
2М значений комплексных амплитуд подвергают операции обратного БПФ на 2М точек, и результаты операции обратного БПФ запоминают в упомянутом массиве. Каждое полученное число этого массива  представляет собой производную по θ.
представляет собой производную по θ.
По полученным производным по θ и протяженности отрезка реализации Т определяют значения производной по t во внутренних точках сетки, т.е. вычисляют скорость сближения Vcбл ЛА с РЛО по формуле:

где  - производные Д по θ,
- производные Д по θ,
а для первой точки существует особая формула, которая не используется из-за больших ошибок дифференцирования [7, с. 78].
В начальной внутренней точке (так как Чебышевские точки нумеруются справа налево, начальные точки оказываются конечными) ошибки дифференцирования также велики и поэтому значение первого внутреннего отсчета при  также игнорируется.
также игнорируется.
В проэкстраполированном участке [t, t+τ] вычисляют среднее значение экстраполированной скорости сближения в соответствии с формулой

где  - значения скорости сближения в [t, t+τ] моменты времени,
- значения скорости сближения в [t, t+τ] моменты времени,

число вычислений (6) в этом интервале.
Оцененные значения скорости сближения  с РЛО выдают в систему управления ЛА для формирования и реализации управляющих сигналов.
с РЛО выдают в систему управления ЛА для формирования и реализации управляющих сигналов.
Далее через интервал времени τ описанные действия по определению экстраполированных на τ значений дальности и скорости сближения повторяют.
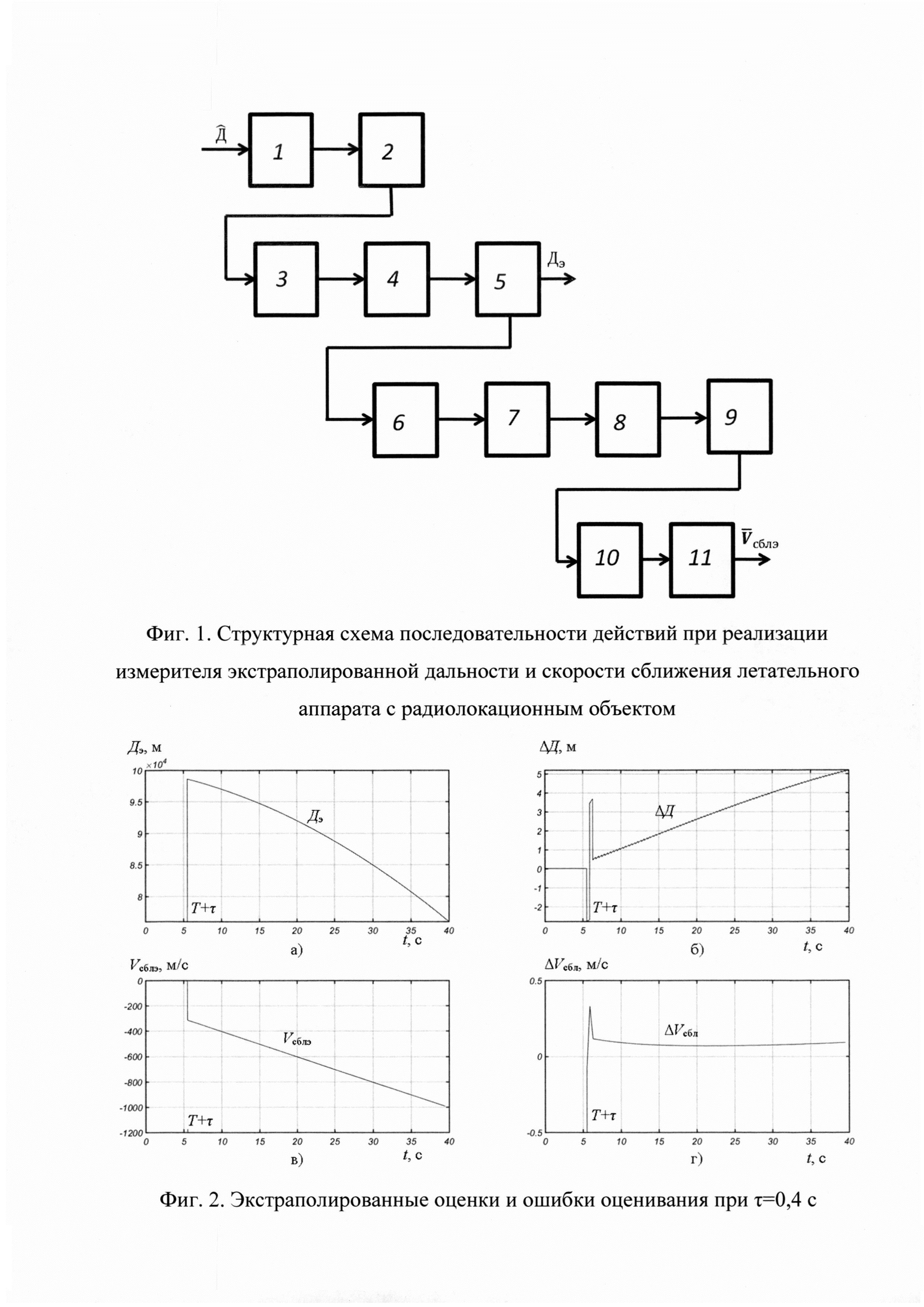
На фиг. 1 представлена блок-схема последовательности действий при реализации измерителя экстраполированной дальности и скорости сближения (ИЭДиС) ЛА с РЛО, где:
1 - измерение дальностей на интервале времени Т через интервал τ;
2 - запоминание отсчетов дальностей;
3 - выполнение БПФ;
4 - определение спектра дальности до РЛО, смещенной в область прогноза;
5 - выполнение обратного БПФ;
6 - определение отсчетов дальностей до РЛО в Чебышевских точках и расширенного вектора;
7 - БПФ в Чебышевских точках;
8 - умножение на im, 
9 - выполнение обратного БПФ;
10 - определение экстраполированной скорости сближения с РЛО;
11 - вычисление средней скорости сближения.
В результате выполнения процедуры 1 формируется периодическая последовательность отсчетов дальностей, поступающих с периодом То. Затем выполняется действие 2 запоминания полученных значений дальности в виде массива в ячейках первого и второго столбцов. В каждом столбце запоминаются N отсчетов дальности, сдвинутых относительно друг друга на время упреждения τ. Число общих отсчетов дальности в столбцах равно (Т-τ)/То.
Принципы измерения и получения отсчетов дальности и выполняемые при этом действия достаточно подробно изложены в литературе, например, в монографии [8, с. 137-152].
Основная новизна изобретения состоит в том, что в предлагаемом способе для определения экстраполированных значений дальности и скорости используются два алгоритма: алгоритм полигармонической экстраполяции 3, 4, 5 и Чебышевское спектральное дифференцирование 6-10, функционирование которых описано выше.
Если значения дальности Д и скорости сближения Vcблэ не известны до начала работы ИЭДиС, то первый после включения интервал Т+τ ИЭДиС работает при условии, что экстраполированная дальность Дэ не сформирована. В этом случае ИЭДиС осуществляет измерение значения дальности Д, которое и используется в момент Т+τ для определения Дэ, а значение Vсблэ0 приравнивают нулю.
Использование заявленного способа не предъявляет дополнительных требований к существующим измерителям дальности, а также к принципам построения вычислителей, поэтому он может быть реализован в большинстве из них.
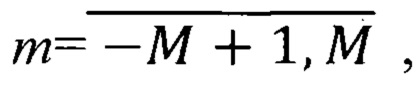
На фиг. 2 приведены графики, иллюстрирующие поведение экстраполированных значений прогнозов дальности и скорости сближения и ошибок прогнозирования с временем упреждения 0,4 с и повторением прогноза через каждые 0,4 с на участке движения с постоянным ускорением сближения, полученные в результате моделирования. На фиг. 2 а) и б) показаны изменения во времени значений прогнозированной дальности Дэ и ошибок прогнозирования в определении дальности ΔД, а на фиг. 2 в) и г) изменение во времени значений прогнозированной скорости сближения Vсблэ и ошибок прогнозирования в определении скорости ΔVcбл соответственно.
При моделировании были сделаны следующие предположения:
-изменение скорости сближения Vсбл является процессом с постоянным ускорением вида Vсбл=Vсбл0+jсбt, где jсб=-20 м/с2;
- число точек для дискретного преобразования Фурье N=512;
- изменение дальности Д является процессом с неизменным коэффициентом преобразования спектра отрезка реализации измерения дальности при переходе от первой реализации ко второй и при переходе от второй реализации к следующей, смещенной относительно предыдущего отрезка на τ=0,4 с.
Графики, отображающие значения экстраполированных дальности и скорости сближения построены для моделируемого полета ЛА с начальной скоростью Vсбл0=-200 м/с, с дальностью, изменяющейся по закону Д=100000-200t-10t2 м, периодом измерения дальностей То=0,01 с, числом Чебышевских точек интерполяции 21 (М=20), с временем упреждения τ=0,4 с через 5,5 с после начала измерения и осреднением по 3-й и 4-й Чебышевским точкам.
Из приведенных графиков следует, что экстраполированная скорость сближения и экстраполированная дальность определяются с точностью ΔVcбл=0,1 м/с, ΔД=5 м через 5,5 с после начала измерения дальности.
Таким образом, совокупность и последовательность выполнения изложенных выше действий обеспечивает реализацию нового способа экстраполяции дальности и скорости сближения без использования математических моделей поведения дальности и скорости сближения ЛА и РЛО.
Использование изобретения по сравнению с известными способами позволяет упростить оценивание экстраполированной дальности и скорости сближения и обеспечить высокую точность их определения.
Список использованных источников
1. Бар Шалом Я. Траекторная обработка. Принципы, способы и алгоритмы: в 2. ч. Часть 2. Пер. с англ. Д.Д. Дмитриева. - М.: МГТУ им. Н.Э. Баумана. 2011.
2. Грешилов А.А. Анализ и синтез стохастических систем. Параметрические модели и конфлюентный анализ. - М.: Радио и связь, 1990.
3. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - Киев: Издательство КВIЦ. 2000.
4. Кузьмин С.З. Основы проектирования систем обработки радиолокационной информации. - М.: Радио и связь, 1986.
5. Шахтарин Б.И. Фильтры Винера и Калмана. - М.: Гелиос АРВ, 2008.
6. Евсеев А.П., Сысоев Д.А. Применение алгоритма полигармонической экстраполяции для реставрации аудиозаписей. // Труды Научной конференции по радиофизике. - Нижний Новгород: ННГУ, 2008.
7. Lloyd N. Trefethen. Spectral Methods in Matlab, SIAM, Philadelphia, 2000.
8. Меркулов В.И. и др. Оценивание дальности и скорости в радиолокационных системах. Ч. 1. - М.: Радиотехника. 2004.

Способ автоматизированного выявления компактных групп взаимодействующих воздушных объектов
Способ формирования канала для передачи оптического сигнала между компонентами электронного модуля
Способ терморихтовки металлических пластин и устройство для его осуществления
Способ образования канала для передачи оптического сигнала между компонентами электронного модуля
Устройство для терморихтовки металлических пластин
Переменный аттенюатор
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных воздушных объектов
Способ траекторного управления беспилотным летательным аппаратом для облета рельефа местности в вертикальной плоскости
Способ и система совместной обработки измерений дальности и скорости для многодиапазонной радиолокационной системы кругового обзора
Датчик температуры электронного модуля
Способ траекторного управления летательными аппаратами с облетом зон с неблагоприятными метеорологическими условиями
Способ перехвата воздушных целей летательными аппаратами
Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке
Способ автоматизированного выявления компактных групп взаимодействующих воздушных объектов
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных воздушных объектов
Способ траекторного управления беспилотным летательным аппаратом для облета рельефа местности в вертикальной плоскости
Способ и система совместной обработки измерений дальности и скорости для многодиапазонной радиолокационной системы кругового обзора
Способ и система идентификации измерений в многодиапазонных рлс
Робототехнический комплекс разминирования
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных летательных аппаратов с повышенной адаптацией к маневру носителя и система для его реализации

