Результат интеллектуальной деятельности: ЭЛЕКТРИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к электрической системе управления полетом для летательного аппарата.
В самолетах все больше используют электрические системы управления полетом. Первые электрические системы управления полетом дублировались аварийной системой ручных приводов с тягами, которая позволяла произвести приземление посредством ручного управления в случае неисправности электрической системы управления полетом. Однако эта система ручных приводов является громоздкой и тяжелой, поэтому в настоящее время конструкторы проектируют летательные аппараты, больше не содержащие такой аварийной системы ручных приводов.
В этом контексте важно, чтобы электрические системы управления полетом имели повышенный уровень надежности. Для обеспечения этого уровня надежности устанавливают избыточные процессоры и дублируют линии связи.
Например, известная электрическая система управления полетом показана на фиг. 1. Она содержит средство 100 управления пилотированием, выполненное с возможностью определения положений рукоятки управления, средство 102 вычисления положения рулей, выполненное с возможностью определения положений аэродинамических рулей в зависимости от положения рукоятки, и средство 104 управления приводами, выполненное с возможностью вычисления команд приведения в действие приводов аэродинамических рулей на основании положений аэродинамических рулей.
Чтобы противостоять возможному сбою в работе вычислительного процессора, средство 100 управления пилотированием, средство 102 вычисления положения рулей и средство 104 управления приводами содержат, каждое, два каскада 106, 107. Каждый каскад 106, 107 включает в себя главный процессор, называемый процессором 108 управления, и вспомогательный процессор, называемый процессором 110 контроля, выполненный с возможностью проверки надежности вычислений, производимых процессором 108 управления. В случае отказа одного из процессоров 108 управления первого каскада 106 средства 100 управления пилотированием, средства 102 вычисления положения рулей или средства 104 управления приводами, процессор 108 управления и процессоры 110 контроля первого каскада 106 выключаются, и все вычисления производят процессоры 108 управления и процессоры 110 контроля второго каскада 107.
Для обеспечения целостности данных, передаваемых между процессорами, процессоры соединены между собой линиями однонаправленной связи или симплексными линиями. Кроме того, каждая из этих линий связи продублирована, чтобы можно было убеждаться, что данные не усечены или не изменены во время их передачи.
Так, процессор 108 управления первого каскада 106 средства 100 управления пилотированием соединен с процессором 108 управления первого каскада 106 средства 102 вычисления положения рулей через четыре линии 112, 114, 116, 118 однонаправленной связи: две из них обеспечивают передачу данных в одном направлении от процессора 108 управления средства 100 управления пилотированием к процессору 108 управления средства 102 вычисления траектории, а две другие обеспечивают передачу данных в обратном направлении от процессора 108 управления средства 102 вычисления траектории к процессору 108 управления средства 100 управления пилотированием.
Точно так же и по тем же причинам процессор 110 контроля первого каскада 106 средства 100 управления пилотированием соединен с процессором 110 контроля первого каскада 106 средства 102 вычисления траекторий через четыре линии 120, 122, 124, 126 связи.
Эта сеть проводов повторяется между, с одной стороны, процессором 108 управления и процессором 110 контроля второго каскада 107 средства управления пилотированием и, с другой стороны, процессорами 108 управления и процессорами 110 контроля второго каскада 107 средства вычисления положения рулей, а также между процессорами 108 управления и процессорами 110 контроля первого 106 и второго 107 каскадов средства вычисления положения рулей и процессорами 108 управления и процессорами 110 контроля первого 106 и второго 107 каскадов средства управления приводами.
Такая электрическая система управления полетом имеет большие массу и объем.
Настоящее изобретение призвано предложить более надежную электрическую систему управления полетом, которая к тому же имеет меньшие массу и объем. В частности, желательно создать систему управления со степенью интеграции не менее 10-10 и с коэффициентом использования не менее 10-10.
В связи с этим объектом изобретения является электрическая система управления полетом для летательного аппарата, содержащая аэродинамические рули и рукоятку для управления указанными аэродинамическими рулями; при этом указанная система управления содержит:
- средство управления пилотированием, содержащее первый каскад и второй каскад, каждый из которых включает в себя:
• вычислительное устройство управления, выполненное с возможностью определения положений рукоятки, при этом указанное вычислительное устройство управления содержит блок кодирования, выполненный с возможностью генерирования кодированных положений рукоятки, и
• вычислительное устройство контроля, выполненное с возможностью проверки достоверности положений рукоятки, определенных вычислительным устройством управления;
- средство вычисления положения рулей, содержащее первый каскад и второй каскад, каждый из которых включает в себя:
• вычислительное устройство управления, выполненное с возможностью вычисления положений рулей на основании кодированных положений рукоятки, и
• вычислительное устройство контроля, выполненное с возможностью проверки достоверности положений рулей, вычисленных вычислительным устройством управления;
- линию однонаправленной связи средств управления пилотированием, называемую первой главной линией пилотирования, соединяющую вычислительное устройство управления первого каскада средства управления пилотированием с вычислительным устройством управления первого каскада средства вычисления положения рулей;
- линию однонаправленной связи средств управления пилотированием, называемую второй главной линией пилотирования, соединяющую вычислительное устройство управления второго каскада средства управления пилотированием с вычислительным устройством управления второго каскада средства вычисления положения рулей;
отличающаяся тем, что средство управления пилотированием содержит третий каскад, включающий в себя:
- вычислительное устройство управления, выполненное с возможностью определения положений рукоятки, при этом указанное вычислительное устройство управления содержит блок кодирования, выполненный с возможностью генерирования кодированных положений рукоятки, и
- вычислительное устройство контроля, выполненное с возможностью проверки достоверности положений рукоятки, определенных вычислительным устройством управления;
и тем, что средство вычисления положения рулей содержит:
- вычислительное устройство управления, выполненное с возможностью вычисления положений рулей на основании кодированных положений рукоятки, и
- вычислительное устройство контроля, выполненное с возможностью проверки достоверности положений рулей, вычисленных вычислительным устройством управления;
и тем, что система управления содержит линию однонаправленной связи средств управления пилотированием, называемую третьей главной линией пилотирования, соединяющую вычислительное устройство управления третьего каскада средства управления пилотированием с вычислительным устройством управления третьего каскада средства вычисления положения рулей;
и тем, что первая главная линия пилотирования является единой линией связи средств управления, выполненной с возможностью передачи кодированных положений рукоятки от вычислительного устройства управления первого каскада средства управления пилотированием в вычислительное устройство управления первого каскада средства вычисления положения рулей;
при этом вторая главная линия пилотирования является единой линией связи средств управления, выполненной с возможностью передачи кодированных положений рукоятки от вычислительного устройства управления второго каскада средства управления пилотированием в вычислительное устройство управления второго каскада средства вычисления положения рулей;
при этом третья главная линия пилотирования является единой линией связи средств управления, выполненной с возможностью передачи кодированных положений рукоятки от вычислительного устройства управления третьего каскада средства управления пилотированием в вычислительное устройство управления третьего каскада средства вычисления положения рулей;
при этом вычислительное устройство контроля первого каскада, вычислительные устройства контроля второго каскада и вычислительное устройство контроля третьего каскада средства вычисления положения рулей соединены с указанными первой, второй и соответственно третьей главными линиями пилотирования через линии связи средств управления;
и в которой вычислительные устройства контроля средства управления пилотированием содержат, каждое, блок кодирования, выполненный с возможностью декодирования кодированных положений рукоятки; при этом вычислительные устройства контроля первого каскада, второго каскада и третьего каскада средства управления пилотированием соединены с указанными первой, второй и соответственно третьей главными линиями пилотирования через линии связи средств управления;
при этом вычислительные устройства контроля средства управления пилотированием выполнены с возможностью проверки достоверности положений рукоятки, декодированных указанными блоками кодирования.
Предпочтительно такая электрическая система управления полетом имеет степень интеграции не менее 10-10 и коэффициент использования не менее 10-10, поэтому нет необходимости в ее дублировании системой ручного управления приводами.
Кроме того, использование только четырех главных линий однонаправленной связи между вычислительным устройством управления и вычислительным устройством контроля первого каскада средства управления пилотированием и вычислительным устройством управления и вычислительным устройством контроля первого каскада средства вычисления положения рулей вместо восьми линий связи в известном решении позволяет значительно уменьшить объем и массу электрической системы управления полетом. Уменьшение числа линий связи позволяет также снизить стоимость электрической системы управления полетом.
Предпочтительно вычислительное устройство контроля проверяет, что при кодировании данных не возникло никакой ошибки.
Согласно частным вариантам выполнения, электрическая система управления полетом имеет один или несколько следующих отличительных признаков:
- блоки кодирования вычислительных устройств управления средства управления пилотированием и блоки кодирования вычислительных устройств контроля средства управления пилотированием выполнены с возможностью осуществления первого циклического избыточного контроля на первом пакете данных, характеризующих указанные положения рукоятки и второго циклического избыточного контроля на втором пакете данных, характеризующих указанные положения рукоятки; при этом указанный второй пакет данных содержит несколько первых пакетов данных,
- она содержит:
- единую линию однонаправленной связи средств управления пилотированием, называемую первой вспомогательной линией пилотирования, выполненную с возможностью передачи кодированных положений рукоятки от вычислительного устройства управления первого каскада средства управления пилотированием в вычислительного устройство управления второго каскада средства вычисления положения рулей;
- единую линию однонаправленной связи средств управления пилотированием, называемую первой аварийной линией пилотирования, выполненную с возможностью передачи кодированных положений рукоятки от вычислительного устройства управления первого каскада средства управления пилотированием в вычислительное устройство управления третьего каскада средства вычисления положения рулей;
- вычислительное устройство контроля второго каскада и вычислительное устройство контроля третьего каскада средства вычисления положения рулей соединены с указанной первой вспомогательной линией пилотирования и соответственно с указанной первой аварийной линией пилотирования через линии связи средств управления;
- она содержит:
- единую линию однонаправленной связи средств управления пилотированием, называемую второй вспомогательной линией пилотирования, выполненную с возможностью передачи кодированных положений рукоятки от вычислительного устройства управления второго каскада средства управления пилотированием в вычислительное устройство управления третьего каскада средства вычисления положения рулей;
- единую линию однонаправленной связи средств управления пилотированием, называемую второй аварийной линией пилотирования, выполненную с возможностью передачи кодированных положений рукоятки от вычислительного устройства управления второго каскада средства управления пилотированием в вычислительное устройство управления первого каскада средства вычисления положения рулей;
- вычислительное устройство контроля третьего каскада и вычислительное устройство контроля первого каскада средства вычисления положения рулей соединены с указанной второй вспомогательной линией пилотирования и соответственно с указанной второй аварийной линией пилотирования через линии связи средств управления;
- она содержит:
- единую линию однонаправленной связи средств управления пилотированием, называемую третьей вспомогательной линией пилотирования, выполненную с возможностью передачи кодированных положений рукоятки от вычислительного устройства управления третьего каскада средства управления пилотированием в вычислительное устройство управления первого каскада средства вычисления положения рулей;
- единую линию однонаправленной связи средств управления пилотированием, называемую третьей аварийной линией пилотирования, выполненную с возможностью передачи кодированных положений рукоятки от вычислительного устройства управления третьего каскада средства управления пилотированием в вычислительное устройство управления второго каскада средства вычисления положения рулей;
- вычислительное устройство контроля первого каскада и вычислительное устройство контроля второго каскада средства вычисления положения рулей соединены с указанной третьей вспомогательной линией пилотирования и соответственно с указанной третьей аварийной линией пилотирования через линии связи средств управления;
- средство вычисления положения рулей выполнено с возможностью приема реальных положений рулей, при этом по меньшей мере одно вычислительное устройство управления и одно вычислительное устройство контроля средства вычисления положения рулей выполнены с возможностью вычисления команд усилий в зависимости от принятых реальных положений рулей, и тем, что система управления содержит:
- единую обратную линию однонаправленной связи команд усилия, называемую первой обратной линией усилия, выполненную с возможностью передачи указанных команд усилия от вычислительного устройства управления первого каскада средства вычисления положения рулей в вычислительное устройство управления первого каскада средства управления пилотированием;
- единую обратную линию однонаправленной связи команд усилия, называемую второй обратной линией усилия, выполненную с возможностью передачи указанных команд усилия от вычислительного устройства управления второго каскада средства вычисления положения рулей в вычислительное устройство управления второго каскада средства управления пилотированием;
- единую обратную линию однонаправленной связи команд усилия, называемую третьей обратной линией усилия, выполненную с возможностью передачи указанных команд усилия от вычислительного устройства управления третьего каскада средства вычисления положения рулей в вычислительное устройство управления третьего каскада средства управления пилотированием;
- вычислительные устройства управления средства вычисления положения рулей содержат, каждое, блок кодирования для кодирования команд усилия, и тем, что указанные вычислительные устройства контроля средства вычисления положения рулей содержат, каждое, блок кодирования, выполненный с возможностью декодирования кодированных команд усилия; при этом указанные блоки кодирования вычислительных устройств контроля первого каскада, второго каскада и третьего каскада средства вычисления положения рулей соединены с указанной первой, второй и соответственно третьей обратными линиями усилия через линии связи средств управления; при этом указанные вычислительные устройства контроля средства вычисления положения рулей выполнены с возможностью проверки достоверности команд усилия, декодированных указанными блоками кодирования;
- вычислительное устройство контроля первого каскада средства управления пилотированием, вычислительное устройство управления и вычислительное устройство контроля второго каскада средства управления пилотированием, вычислительное устройство управления и вычислительное устройство контроля третьего каскада средства управления пилотированием соединены, каждое, с указанной первой обратной линией усилия через линии связи средств управления;
вычислительное устройство контроля второго каскада средства управления пилотированием, вычислительное устройство управления и вычислительное устройство контроля первого каскада средства управления пилотированием, вычислительное устройство управления и вычислительное устройство контроля третьего каскада средства управления пилотированием соединены, каждое, с указанной второй обратной линией усилия через линии связи средств управления;
вычислительное устройство контроля третьего каскада средства управления пилотированием, вычислительное устройство управления и вычислительное устройство контроля первого каскада средства управления пилотированием, вычислительное устройство управления и вычислительное устройство контроля второго каскада средства управления пилотированием соединены, каждое, с указанной третьей обратной линией усилия через линии связи средств управления.
Объектом изобретения является также электрическая система управления полетом для летательного аппарата, содержащая аэродинамические рули, приводы, выполненные с возможностью приведения в действие указанных аэродинамических рулей в зависимости от команд приведения в действие, рукоятку, выполненную с возможностью перемещения для управления приведением в действие указанных аэродинамических рулей; при этом указанная система управления содержит:
- средство вычисления положения рулей, содержащее первый каскад и второй каскад, каждый из которых включает в себя:
- вычислительное устройство управления, выполненное с возможностью приема положений рукоятки и вычисления положений рулей на основании положений рукоятки, при этом указанное вычислительное устройство управления содержит блок кодирования, выполненный с возможностью генерирования кодированных положений рулей, и
- вычислительное устройство контроля, выполненное с возможностью проверки достоверности положений рулей, вычисленных вычислительным устройством управления;
- средство управления приводами, содержащее первый каскад и второй каскад, каждый из которых включает в себя:
- вычислительное устройство управления, выполненное с возможностью определения команд приведения в действие аэродинамических рулей на основании положений рулей, и
- вычислительное устройство контроля, выполненное с возможностью проверки достоверности команд приведения в действие, определенных указанным вычислительным устройством управления;
- линию однонаправленной связи приводов положения рулей, называемую первой главной линией приводов, соединяющую вычислительное устройство управления первого каскада средства вычисления положения рулей с вычислительным устройством управления первого каскада средства управления приводами;
- линию однонаправленной связи приводов положения рулей, называемую второй главной линией приводов, соединяющую вычислительное устройство управления второго каскада средства вычисления положения рулей с вычислительным устройством управления второго каскада средства управления приводами;
отличающаяся тем, что средство вычисления положения рулей содержит третий каскад, включающий в себя:
- вычислительное устройство управления, выполненное с возможностью приема положений рукоятки и вычисления положения рулей на основании положений рукоятки, при этом указанное вычислительное устройство управления содержит блок кодирования, выполненный с возможностью генерирования кодированных положений рулей, и
- вычислительное устройство контроля, выполненное с возможностью проверки достоверности положений рулей, вычисленных вычислительным устройством управления;
и тем, что средство управления приводами содержит:
- вычислительное устройство управления, выполненное с возможностью вычисления команд приведения в действие на основании кодированных положений рукоятки, и
- вычислительное устройство контроля, выполненное с возможностью проверки достоверности команд приведения в действие, вычисленных вычислительным устройством управления;
и тем, что система управления содержит:
- линию однонаправленной связи приводов положения рулей, называемую третьей главной линией приводов, соединяющую вычислительное устройство управления третьего каскада средства вычисления положения рулей с вычислительным устройством управления третьего каскада средства управления приводами;
и тем, что первая главная линия приводов является единой линией приводов, выполненной с возможностью передачи кодированных положений рулей от вычислительного устройства управления первого каскада средства вычисления положения рулей в вычислительное устройство управления первого каскада средства управления приводами;
при этом вторая главная линия приводов является единой линией приводов, выполненной с возможностью передачи кодированных положений рулей от вычислительного устройства управления второго каскада средства вычисления положения рулей в вычислительное устройство управления второго каскада средства управления приводами;
при этом третья главная линия приводов является единой линией приводов, выполненной с возможностью передачи кодированных положений рулей от вычислительного устройства управления третьего каскада средства вычисления положения рулей в вычислительное устройство управления третьего каскада средства управления приводами;
при этом вычислительные устройства контроля первого каскада, второго каскада и третьего каскада средства вычисления положения рулей соединены, каждое, с указанной первой, второй и соответственной третьей линиями приводов через линии связи средств управления для приема кодированных положений рулей;
вычислительные устройства контроля средства вычисления положения рулей содержат, каждое, блок кодирования, выполненный с возможностью декодирования кодированных положений рулей; при этом вычислительные устройства контроля средства вычисления положения рулей выполнены с возможностью проверки достоверности положений рулей, декодированных указанными блоками кодирования.
Согласно частным вариантам выполнения, электрическая система управления полетом имеет один или несколько следующих отличительных признаков:
- блоки кодирования вычислительного устройства управления средства вычисления положения рулей и блоки кодирования вычислительного устройства контроля средства управления приводами выполнены с возможностью осуществления первого циклического избыточного контроля на первом пакете данных, характеризующих указанные положения рукоятки, и второго циклического избыточного контроля на втором пакете данных, характеризующих указанные положения рукоятки; при этом указанный второй пакет данных содержит несколько первых пакетов данных,
- она содержит:
- единую линию однонаправленной связи приводов, называемую первой вспомогательной линией приводов, выполненную с возможностью передачи кодированных положений рулей от вычислительного устройства управления первого каскада средства вычисления положения рулей в вычислительное устройство управления второго каскада средства управления приводами;
- единую линию однонаправленной связи приводов, называемую первой аварийной линией приводов, выполненную с возможностью передачи кодированных положений рулей от вычислительного устройства управления первого каскада средства вычисления положения рулей в вычислительное устройство управления третьего каскада средства управления приводами;
- вычислительное устройство контроля второго каскада и вычислительное устройство контроля третьего каскада средства управления приводами соединены с указанной первой вспомогательной линией приводов и соответственно с указанной первой аварийной линией приводов через линии связи средств управления.
- она содержит:
- единую линию однонаправленной связи приводов, называемую второй вспомогательной линией приводов, выполненную с возможностью передачи кодированных положений рулей от вычислительного устройства управления второго каскада средства вычисления положения рулей в вычислительное устройство управления третьего каскада средства управления приводами;
- единую линию однонаправленной связи приводов, называемую второй аварийной линией приводов, выполненную с возможностью передачи кодированных положений рулей от вычислительного устройства управления второго каскада средства вычисления положения рулей в вычислительное устройство управления первого каскада средства управления приводами;
- вычислительное устройство контроля третьего каскада и вычислительное устройство контроля первого каскада средства управления приводами соединены с указанной второй вспомогательной линией приводов и соответственно с указанной второй аварийной линией приводов через линии связи средств управления.
- она содержит:
- единую линию однонаправленной связи приводов, называемую третьей вспомогательной линией приводов, выполненную с возможностью передачи кодированных положений рулей от вычислительного устройства управления третьего каскада средства вычисления положения рулей в вычислительное устройство управления первого каскада средства управления приводами;
- единую линию однонаправленной связи приводов, называемую третьей аварийной линией приводов, выполненную с возможностью передачи кодированных положений рулей от вычислительного устройства управления третьего каскада средства вычисления положения рулей в вычислительное устройство управления второго каскада средства управления приводами;
- вычислительное устройство контроля первого каскада и вычислительное устройство контроля второго каскада средства управления приводами соединены с указанной третьей вспомогательной линией приводов и соответственно с указанной третьей аварийной линией приводов через линии связи средств управления,
- вычислительные устройства управления и вычислительные устройства контроля первого, второго и третьего каскадов средства управления приводами выполнены с возможностью определения реальных положений рулей, и система управления содержит:
- единую обратную линию однонаправленной связи приводов, называемую первой главной обратной линией приводов, выполненную с возможностью передачи указанных реальных положений рулей от вычислительного устройства управления первого каскада средства управления приводами в вычислительное устройство правления первого каскада средства вычисления положения рулей;
- единую обратную линию однонаправленной связи приводов, называемую второй главной обратной линией приводов, выполненную с возможностью передачи указанных реальных положений рулей от вычислительного устройства управления второго каскада средства вычисления положения рулей в вычислительное устройство управления второго каскада средства управления приводами;
- единую обратную линию однонаправленной связи приводов, называемую третьей главной обратной линией приводов, выполненную с возможностью передачи указанных реальных положений рулей от вычислительного устройства управления третьего каскада средства управления приводами в вычислительное устройство управления третьего каскада средства вычисления положения рулей;
- вычислительные устройства управления средства управления приводами содержат, каждое, блок кодирования, выполненный с возможностью генерирования кодированных положений рулей, и тем, что вычислительные устройства контроля первого каскада, второго каскада и третьего каскада средства управления приводами соединены с указанной первой, второй и соответственно третьей главными обратными линиями приводов через линии связи средств управления; вычислительные устройства контроля средства управления приводами содержат, каждое, блок, выполненный с возможностью декодирования кодированных реальных положений рулей; при этом вычислительные устройства контроля средства управления приводами выполнены с возможностью проверки достоверности реальных положений рулей, декодированных указанными блоками кодирования,
- вычислительное устройство контроля первого каскада устройства вычисления положения рулей соединено с указанной первой главной обратной линией приводов через линию связи средств управления;
вычислительное устройство контроля второго каскада устройства вычисления положения рулей соединено с указанной второй главной обратной линией приводов через линию связи средств управления;
вычислительное устройство контроля третьего каскада устройства вычисления положения рулей соединено с указанной третьей главной обратной линией приводов через линию связи средств управления;
- она содержит:
- единую обратную линию однонаправленной связи приводов, называемую первой вспомогательной обратной линией приводов, выполненную с возможностью передачи кодированных реальных положений рулей от вычислительного устройства управления первого каскада средства управления приводами в вычислительное устройство управления второго каскада средства вычисления положения рулей;
- единую обратную линию однонаправленной связи приводов, называемую первой аварийной обратной линией приводов, выполненную с возможностью передачи кодированных реальных положений рулей от вычислительного устройства управления первого каскада средства управления приводами в вычислительное устройство управления третьего каскада средства вычисления положения рулей;
- вычислительное устройство контроля второго каскада и вычислительное устройство контроля третьего каскада средства вычисления положения рулей соединены с указанной первой вспомогательной обратной линией приводов и соответственно с указанной первой аварийной обратной линией приводов через линии связи средств управления,
- она содержит:
- единую обратную линию однонаправленной связи приводов, называемую второй вспомогательной обратной линией приводов, выполненную с возможностью передачи кодированных реальных положений рулей от вычислительного устройства управления второго каскада средства управления приводами в вычислительное устройство управления третьего каскада средства вычисления положения рулей;
- единую обратную линию однонаправленной связи приводов, называемую второй аварийной обратной линией приводов, выполненную с возможностью передачи кодированных реальных положений рулей от вычислительного устройства управления второго каскада средства управления приводами в вычислительное устройство управления первого каскада средства вычисления положения рулей;
- вычислительное устройство контроля третьего каскада и вычислительное устройство контроля первого каскада средства вычисления положения рулей соединены с указанной второй вспомогательной обратной линией приводов и соответственно с указанной второй аварийной обратной линией приводов через линии связи средств управления,
- она содержит:
- единую обратную линию однонаправленной связи приводов, называемую третьей вспомогательной обратной линией приводов, выполненную с возможностью передачи кодированных реальных положений рулей от вычислительного устройства управления третьего каскада средства управления приводами в вычислительное устройство управления первого каскада средства вычисления положения рулей;
- единую обратную линию однонаправленной связи приводов, называемую третьей аварийной обратной линией приводов, выполненную с возможностью передачи кодированных реальных положений рулей от вычислительного устройства управления третьего каскада средства управления приводами в вычислительное устройство управления второго каскада средства вычисления положения рулей;
- вычислительное устройство контроля первого каскада и вычислительное устройство контроля второго каскада средства вычисления положения рулей соединены с указанной третьей вспомогательной обратной линией приводов и соответственно с указанной третьей аварийной обратной линией приводов через линии связи средств управления.
Вспомогательные линии связи и аварийные линии связи значительно увеличивают общее использование системы управления, так как, например, в случае сбоя в работе вычислительного устройства управления первого каскада средства вычислений траекторий только вычислительное устройство управления и вычислительное устройство контроля первого каскада средства вычисления траекторий заменяют на вычислительное устройство управления и вычислительное устройство контроля второго каскада средства вычисления траекторий. При этом система управления работает с вычислительным устройством управления и вычислительным устройством, контроля первого каскада средства управления пилотированием, с вычислительным устройством управления и вычислительным устройством контроля второго каскада средства вычисления положения рулей и с вычислительным устройством управления и вычислительным устройством контроля первого каскада средства управления приводами. При этом система допускает еще две неисправности на уровне средства управления пилотированием, одну неисправность на уровне средства вычисления положения рулей и две неисправности на уровне средства управления приводами.
Применение циклического избыточного контроля на двух разных количествах данных обеспечивает целостность передаваемых данных.
Изобретение будет более очевидно из нижеследующего описания, представленного исключительно в качестве примера, со ссылками на следующие фигуры:
фиг. 1 - схема известной электрической системы управления полетом;
фиг. 2 - схема заявленной электрической системы управления полетом, где показаны только линии связи от средства управления пилотированием к средству управления приводами;
фиг. 3 - схематичный пример кадров оформления пакетов данных;
фиг. 4 - схема заявленной электрической системы управления полетом, где показаны только линии связи от средства управления приводами к средству управления пилотированием.
Как показано на фиг. 2, система 2 управления в соответствии с изобретением содержит средство 4 управления пилотированием, средство 6 вычисления положения рулей и средство 8 управления приводами.
Средство 4 управления пилотированием содержит три каскада 10, 12, 14, расположенные в мини-рукоятке 9, в рукоятке или в рычаге управления, называемых в дальнейшем просто рукояткой 9. Каждый каскад 10, 12, 14 содержит главное вычислительное устройство, в дальнейшем называемое вычислительным устройством 16, 18, 20 управления, и избыточное вычислительное устройство, в дальнейшем называемое вычислительным устройством 22, 24, 26 контроля, соединенное с вычислительным устройством управления своего каскада через линию 27 связи.
Вычислительное устройство 16 управления и вычислительное устройство 22 контроля первого каскада 10 выполнены в виде двух печатных плат, расположенных друг против друга. Как правило, все вычислительные устройства управления и вычислительные устройства контроля, показанные в виде двух прилегающих друг к другу прямоугольников на фиг. 2 и 4, представляют собой две печатные платы, расположенные друг против друга в одном корпусе.
Вычислительные устройства 16, 18, 20 управления каждого каскада выполнены с возможностью определения положений рукоятки в зависимости от различных измерений положений, производимых датчиками, потенциометрами и т.д. Вычислительные устройства 22, 24, 26 контроля каждого каскада выполнены с возможностью проверки точности вычислений, выполняемых вычислительным устройством 16, 18, 20 управления, с которым они соединены.
Для этого вычислительные устройства 16, 18, 20 управления передают в вычислительные устройства 22, 24, 26 контроля вычисленные ими положения рукоятки через линию 27 связи. Вычислительные устройства 22, 24, 26 контроля определяют, например, положения рукоятки, применяя метод определения, отличный от метода, используемого вычислительными устройствами 16, 18, 20 управления. Затем вычислительные устройства 22, 24, 26 контроля сравнивают положения рукоятки, полученные через линию 27 связи, с положениями рукоятки, которые они определили сами. Если, например, вычислительное устройство 22 контроля первого каскада 10 средства управления пилотированием обнаруживает расхождения между полученными положениями рукоятки и положениями, которые оно определило самостоятельно, вычислительное устройство 16 управления и вычислительное устройство 22 контроля первого каскада отключаются. В этом случае вместо них работают вычислительное устройство 18 управления и вычислительное устройство 24 второго каскада 12, которые передают положения рукоятки в средство 6 вычисления положения рулей.
Точно так же работают вычислительные устройства 18, 20 и вычислительные устройства 24, 26 контроля второго и третьего каскадов средства управления пилотированием.
Каждое вычислительное устройство 16, 18, 20 управления средства 4 управления пилотированием содержит блок 28, 30, 32 кодирования, выполненный с возможностью кодирования положений рукоятки для их передачи в средство 6 вычисления положения рулей и с возможностью декодирования команд усилия, получаемых средством 6 вычисления положения рулей.
В частности, блоки 28-32 кодирования выполнены с возможностью осуществления первого циклического избыточного контроля на первом пакете Р1 данных и второго циклического избыточного контроля на втором пакете Р2 данных; при этом второй пакет Р2 данных содержит несколько первых пакетов Р1 данных, как показано на фиг. 3.
Блоки 28-32 кодирования выполнены также с возможностью применения кода коррекции ошибок, предназначенного для коррекции возможных ошибок при передаче данных. Так, по время кодирования данных блоки 28-32 кодирования могут генерировать код циклического избыточного контроля CRC1 и код коррекции ошибок ЕСС, передаваемые после каждого пакета Р1 данных, и код циклического избыточного контроля CRC2, передаваемый после каждого пакета Р2 данных.
Во время декодирования данных блоки 28-32 кодирования могут проверять надежность данных при помощи кодов CRC2 и кодов CRC1, а также, в случае необходимости, корректировать одну или несколько данных при помощи кодов ЕСС.
Каждое вычислительное устройство 22, 24, 26 контроля содержит блок 34, 36, 38 кодирования, идентичный блокам 28-32 кодирования и работающий таким же образом. Блоки 34-38 кодирования выполнены с возможностью декодирования положений рукоятки и команд усилия, что будет подробно описано ниже.
Технологии кодирования кодов коррекции и циклического избыточного контроля, применяемые блоками 28-32 кодирования, являются технологиями кодирования, обычно используемыми для передачи информации. Они не являются объектом настоящей патентной заявки, и их подробное описание опускается.
В варианте можно использовать другие технологии кодирования, обеспечивающие целостность данных, например, вычисление четности, коды обнаружения ошибок, коды коррекции ошибок и т.д.
Средство 6 вычисления положения рулей содержит три каскада, соответствующие трем каскадам 10, 12, 14 средства управления пилотированием и имеющие такие же обозначения для упрощения описания.
Каждый каскад 10, 12, 14 средства 6 вычисления положения рулей содержит главное вычислительное устройство, называемое вычислительным устройством 40, 42, 44 управления, и избыточное вычислительное устройство, называемое вычислительным устройством 46, 48, 50 контроля, соединенное с вычислительным устройством 40, 42, 44 управления своего каскада через линию 51 связи.
Три каскада 10, 12, 14 средства 6 вычисления положения рулей обычно расположены в трех разных местах летательного аппарата по причине их большого габарита. Так, вычислительное устройство 40 управления и вычислительное устройство 46 контроля представляют собой две печатные платы, расположенные друг против друга в одном корпусе 49. Вычислительное устройство 42 управления и вычислительное устройство 48 контроля представляют собой две печатные платы, расположенные друг против друга в другом корпусе 53. Вычислительное устройство 44 управления и вычислительное устройство 50 контроля представляют собой две печатные платы, расположенные друг против друга в последнем корпусе 55.
Вычислительные устройства 40, 42, 44 управления выполнены с возможностью вычисления траекторий полета в зависимости от положений рукоятки, определяемых средством 4 управления пилотированием. Вычислительные устройства 46, 48, 50 контроля выполнены с возможностью проверки достоверности траекторий полета, вычисляемых вычислительными устройствами 40, 42, 44 управления их каскада, как это было описано для вычислительных устройств контроля средства 4 управления пилотированием.
Вычислительные устройства 40, 42, 44 управления и вычислительные устройства 46, 48, 50 контроля каждого каскада средства 6 вычисления положения рулей содержат, каждое, блок 52, 54, 56, 58, 60, 62 кодирования, идентичные с блоками 28-38 кодирования, поэтому их подробное описание опускается. Блоки 52-56 кодирования выполнены с возможностью декодирования положений рукоятки и положений рулей и с возможностью кодирования положений рулей и команд усилия. Блоки 58-62 кодирования выполнены с возможностью декодирования положений рукоятки, задаваемых положений рулей, реальных положений рулей и команд усилия.
Вычислительное устройство 40 управления и вычислительное устройство 46 контроля первого каскада соединены также с вычислительным устройством 42 управления и с вычислительным устройством 48 контроля второго каскада, а также с вычислительным устройством 44 управления и с вычислительным устройством 50 контроля третьего каскада 14 для передачи в них данных синхронизации через линии связи, не показанные на фиг. 2.
Средство 8 управления приводами тоже содержит три каскада, соответствующие трем каскадам средства 4 управления пилотированием и имеющих те же обозначения 10, 12, 14. Точно так же, каждый каскад 10, 12, 14 средства 8 управления приводами содержит главное вычислительное устройство, называемое вычислительным устройством 64, 66, 68 управления, и избыточное вычислительное устройство, называемое вычислительным устройством 70, 72, 74 контроля, соединенное с вычислительным устройством управления своего каскада через линию 75 связи. Три каскада средства управления приводами расположены в разных местах летательного аппарата. Вычислительное устройство 64 управления и вычислительное устройство 70 контроля представляют собой две печатные платы, расположенные друг против друга в одном корпусе 77. Вычислительное устройство 66 управления и вычислительное устройство 72 контроля представляют собой две печатные платы, расположенные друг против друга в другом корпусе 79. Вычислительное устройство 68 управления и вычислительное устройство 74 контроля представляют собой две печатные платы, расположенные друг против друга в последнем корпусе 81.
Вычислительные устройства 64, 66, 68 управления выполнены с возможностью вычисления команд приведения в действие приводов аэродинамических рулей в зависимости от траекторий полета, вычисляемых средством 6 вычисления положения рулей. Вычислительные устройства 70, 72, 74 контроля трех каскадов средства 8 управления приводами работают так же, как и вычислительные устройства контроля трех каскадов средства 4 управления пилотированием, и повторное подробное описание их работы опускается. В частности, каждое вычислительное устройство 70, 72, 74 контроля выполнено с возможностью проверки достоверности команд приведения в действие, вычисляемых вычислительным устройством управления его каскада.
Вычислительные устройства 64, 66, 68 управления и вычислительные устройства 70, 72, 74 контроля трех каскадов средства 8 управления приводами содержат, каждое, блок 76, 78, 80, 82, 84, 86 кодирования, идентичный с блоками 28-32 кодирования, и их повторное подробное описание опускается. Блоки 76-80 кодирования выполнены с возможностью декодирования траекторий полета, передаваемых средством 6 вычисления траекторий и с возможностью кодирования положений рулей. Блоки 82-86 кодирования выполнены с возможностью декодирования задаваемых положений рулей и декодирования реальных положений рулей.
Далее следует описание линий связи, обеспечивающих передачу данных от средства 4 управления пилотированием к средству 8 управления приводами.
Вычислительное устройство 16 управления соединено с вычислительным устройством 40 управления через линию однонаправленной связи средств управления пилотированием, называемую первой главной линией 88 пилотирования. Эта главная линия 88 пилотирования, а также все линии однонаправленной связи средств управления системы управления в соответствии с изобретением выполнены при помощи шины связи.
Согласно настоящей патентной заявке, термин «однонаправленный» относится к каналу, который переносит информацию только в одном направлении.
Первая главная линия 88 пилотирования выполнена с возможностью передачи положений рукоятки 9 от вычислительного устройства 16 управления в вычислительное устройство 40 управления.
Вычислительные устройства 22 контроля первого каскада 10 средства управления пилотированием соединено с первой главной линией 88 пилотирования через линию 92 связи средств управления в точке соединения; при этом указанная точка соединения находится между концом цепи вычисления, обработки и кодирования данных и выходом вычислительного устройства 16 управления первого каскада 10 средства управления пилотированием.
Блок 34 кодирования выполнен с возможностью декодирования положений рукоятки, получаемых вычислительным устройством 22 контроля через линию 92 связи средств управления. Вычислительное устройство 22 контроля выполнено с возможностью проверки достоверности положений рукоятки, декодируемых блоком 34 кодирования. Если декодированные положения рукоятки отличаются от положений рукоятки, переданных вычислительным устройством 16 управления до кодирования через линию 27 связи, то вычислительное устройство 16 управления и вычислительное устройство 22 контроля первого каскада отключаются, и их подменяют вычислительное устройство 18 управления и вычислительное устройство 24 контроля второго каскада 12 средства управления пилотированием.
Предпочтительно линия 92 связи средств управления, блок 34 кодирования и вычислительное устройство 22 контроля первого каскада средства управления пилотированием позволяют проверять положения рукоятки в формате, переданном в средство вычисления положения рулей, таким образом, чтобы проверять всю цепь вычисления и обработки данных вычислительного устройства 16 управления, в том числе в части кодирования. Таким образом, эта вторая проверка достоверности данных вычислительным устройством 22 контроля обеспечивает дополнительный уровень надежности системе управления в соответствии с изобретением.
Вычислительное устройство 46 контроля первого каскада 10 средства 6 вычисления положения рулей соединено с первой главной линией 88 пилотирования через линию 90 связи средств управления в точке соединения; при этом указанная точка соединения находится в месте, близком к входу вычислительного устройства 40 управления. Термин «в месте, близком» обозначает в настоящей патентной заявке, что линия связи выполнена между двумя печатными платами, находящимися в одном корпусе, и что, следовательно, линия 90 связи средств управления не проходит в летательном аппарате между двумя разными корпусами.
Точно так же, линия 92 связи средств управления выполнена либо в виде провода длиной в несколько сантиметров, проходящего между двумя печатными платами вычислительного устройства 16 управления и вычислительного устройства 22 контроля, либо в виде двух точек пайки между двумя печатными платами.
Предпочтительно в летательном аппарате между рукояткой 9 и корпусом 49, содержащим первый каскад средства вычислений траекторий, проходит только один провод, то есть первая главная линия 88 однонаправленной связи пилотирования, а не два провода 112, 114, как в известной системе управления. Таким образом, заявленная система управления является менее объемной и менее тяжелой.
Блок 58 кодирования декодирует положения рукоятки, получаемые через линию 90 связи средств управления. Вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей использует положения рукоятки, декодированные блоком 58 кодирования, для вычисления траекторий полета. Таким образом, предпочтительно вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей получает те же самые данные, что и вычислительное устройство 40 управления первого каскада средства вычисления положения рулей.
Вычислительное устройство 16 управления первого каскада средства управления пилотированием соединено с вычислительным устройством 42 управления второго каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую первой вспомогательной линий 94 пилотирования. Вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей соединено с первой вспомогательной линией 94 пилотирования через линию 96 связи средств управления, соединенную в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 42 управления второго каскада средства вычисления положения рулей. Таким образом, вычислительное устройство 48 контроля получает те же самые данные, что и вычислительное устройство 42 управления второго каскада средства вычисления положения рулей.
Вычислительное устройство 16 управления выполнено с возможностью передачи кодированных положений рукоятки в вычислительное устройство 42 управления и в вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей через первую вспомогательную линию 94 пилотирования.
Точно так же, вычислительное устройство 16 управления первого каскада средства управления пилотированием соединено с вычислительным устройством 44 управления третьего каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую первой аварийной линий 98 пилотирования. Вычислительное устройство 50 контроля третьего каскада средства вычисления положения рулей соединено с первой аварийной линией 98 пилотирования через линию 130 связи средств управления, соединенную в точке соединения; при этом указанная точка соединения находится в месте, близком к входу вычислительного устройства 44 управления третьего каскада средства вычисления положения рулей.
Вычислительное устройство 16 управления выполнено с возможностью передачи кодированных положений рукоятки в вычислительное устройство 44 управления и в вычислительное устройство 50 контроля третьего каскада средства вычисления положения рулей через первую аварийную линию 130 пилотирования.
Таким образом, предпочтительно вычислительные устройства 16 управления и 22 контроля первого каскада средства управления пилотированием выполнены с возможностью передачи кодированных положений рукоятки в вычислительные устройства 42, 44 управления и 48, 50 контроля второго каскада и третьего каскада средства вычисления положения рулей в случае отказа вычислительных устройств первого каскада средства вычисления положения рулей.
Описанные выше схему соединения и способ работы используют также для вычислительных устройств управления и контроля второго каскада и третьего каскада средства управления пилотированием, поэтому их описание. опускается. Ниже будут описаны только соединяющие их линии связи.
Вычислительное устройство 18 управления второго каскада средства управления пилотированием соединено с вычислительным устройством 42 управления второго каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую второй главной линией 132 пилотирования.
Вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей соединено со второй главной линией 132 пилотирования через линию 133 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 42 управления второго каскада средства вычисления положения рулей.
Вычислительное устройство 24 контроля второго каскада средства управления пилотированием соединено со второй главной линией 132 пилотирования через линию 135 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к выходу вычислительного устройства 18 управления второго каскада средства управления пилотированием.
Вычислительное устройство 18 управления второго каскада средства управления пилотированием соединено с вычислительным устройством 44 управления третьего каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую второй вспомогательной линией 134 пилотирования.
Вычислительное устройство 50 контроля третьего каскада средства управления пилотированием соединено со второй вспомогательной линией 134 пилотирования через линию 136 средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 44 управления третьего каскада средства вычисления положения рулей.
Вычислительное устройство 18 управления второго каскада средства управления пилотированием соединено с вычислительным устройством 40 управления первого каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую второй аварийной линией 138 пилотирования.
Вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей соединено со второй аварийной линией 138 пилотирования через линию 140 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 40 управления первого каскада средства вычисления положения рулей.
Вычислительное устройство 20 управления третьего каскада средства управления пилотированием соединено с вычислительным устройством 44 управления третьего каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую третьей главной линией 142 пилотирования.
Вычислительное устройство 26 контроля третьего каскада средства управления пилотированием соединено с третьей главной линией 142 пилотирования через линию 143 связи средств управления в точке соединения, близкой к входу вычислительного устройства 20 управления.
Вычислительное устройство 50 контроля третьего каскада средства вычисления положения рулей соединено с третьей главной линией 142 пилотирования через линию 144 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 44 управления третьего каскада средства вычисления положения рулей.
Вычислительное устройство 20 управления третьего каскада средства управления пилотированием соединено с вычислительным устройством 40 управления первого каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую третьей вспомогательной линией 146 пилотирования.
Вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей соединено с третьей вспомогательной линией 146 пилотирования через линию 148 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 40 управления первого каскада средства вычисления положения рулей.
Вычислительное устройство 20 управления третьего каскада средства управления пилотированием соединено с вычислительным устройством 42 управления второго каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую третьей аварийной линией 150 пилотирования.
Вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей соединено с третьей аварийной линией 150 пилотирования через линию 152 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 42 управления второго каскада средства вычисления положения рулей.
Вычислительные устройства 18, 20 управления второго и третьего каскадов средства управления пилотированием выполнены с возможностью передачи кодированных положений рукоятки в вычислительные устройства 40-50 управления и контроля средства вычисления положения рулей через линии 132-150 однонаправленной связи средств управления.
Вычислительные устройства 40, 42, 44 управления первого, второго и третьего каскадов средства вычисления положения рулей выполнены с возможностью передачи кодированных положений рулей в вычислительные устройства 64, 66, 68 управления и в вычислительные устройства 70, 72, 74 контроля первого, второго и третьего каскадов средства управления приводами через линии 154-188 однонаправленной связи средств управления.
Компоновка линий связи, а также способ работы вычислительных устройств управления и контроля являются идентичными и имеют те же преимущества, что и компоновка и способ работы вычислительных устройств управления и контроля, описанные выше для передачи данных между средством 4 управления пилотированием и средством 6 вычисления положения рулей. Их повторное подробное описание опускается.
Таким образом, предпочтительно, как и вычислительные устройства 22, 24, 26 контроля средства управления пилотированием, вычислительные устройства 46, 48, 50 контроля средства вычисления положения рулей осуществляют две проверки вычислений и обработки, осуществляемых вычислительными устройствами 40, 42, 44 управления: первую проверку путем сравнения с положениями рулей, переданными через линии 51 связи до кодирования, и вторую путем сравнения с кодированными положениями рулей, переданными через линии 165, 178, 192 связи средств управления.
Предпочтительно вычислительные устройства управления данного каскада средства вычисления положения рулей соединены при помощи «перекрещивающихся» линий связи с вычислительными устройствами управления других каскадов средства управления приводами.
Вычислительные устройства 70, 72, 74 контроля средства управления приводами получают те же самые входные данные, что и вычислительные устройства 64, 66, 68 управления.
Далее следует описание линий связи между средством 6 вычисления положения рулей и средством 8 управления приводами.
Вычислительное устройство 40 первого каскада средства вычисления положения рулей соединено с вычислительным устройством 64 управления первого каскада средства управления приводами через единую линию однонаправленной связи средств управления, называемую первой главной линией 154 приводов. Вычислительное устройство 70 контроля первого каскада средства управления приводами соединено с первой главной линией 154 связи приводов через линию 156 связи средств управления в точке соединения, при этом указанная точка соединения находится близко к входу вычислительного устройства 64 управления первого каскада средства управления приводами.
Вычислительное устройство 40 первого каскада средства вычисления траекторий соединено с вычислительным устройством 66 управления второго каскада средства управления приводами через единую линию однонаправленной связи средств управления, называемую первой вспомогательной линией 158 приводов. Вычислительное устройство 72 контроля второго каскада средства управления приводами соединено с первой вспомогательной линией 158 приводов через линию 160 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 66 управления второго каскада средства управления приводами.
Вычислительное устройство 40 первого каскада средства вычисления положения рулей соединено с вычислительным устройством 68 управления третьего каскада средства управления приводами через единую линию однонаправленной связи средств управления, называемую первой аварийной линией 162 приводов. Вычислительное устройство 74 контроля третьего каскада средства управления приводами соединено с первой аварийной линией 162 приводов через линию 164 связи средств управления в точке соединения, при этом указанная точка соединения находится близко к входу вычислительного устройства 68 управления третьего каскада средства управления приводами.
Вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей соединено с первой главной линией 154 приводов через линию 165 связи средств управления в точке соединения, при этом указанная точка соединения находится близко к выходу вычислительного устройства 40 управления первого каскада средства вычисления положения рулей для получения кодированных положений рулей и проверки их достоверности.
Вычислительное устройство 42 управления второго каскада средства вычисления положения рулей соединено с вычислительным устройством 66 управления второго каскада средства управления приводами через единую линию однонаправленной связи средств управления, называемую второй главной линией 166 приводов. Вычислительное устройство 72 контроля второго каскада средства управления приводами соединено со второй главной линией 166 приводов через линию 168 связи средств управления в точке соединения, при этом указанная точка соединения находится близко к входу вычислительного устройства 166 управления второго каскада средства управления приводами.
Вычислительное устройство 42 управления второго каскада средства вычисления положения рулей соединено с вычислительным устройством 68 управления третьего каскада средства управления приводами через единую линию однонаправленной связи средств управления, называемую второй вспомогательной линией 170 приводов. Вычислительное устройство 74 контроля соединено со второй вспомогательной линией 170 приводов через линию 172 связи средств управления в точке соединения, при этом указанная точка соединения находится близко к входу вычислительного устройства 68 управления третьего каскада средства управления приводами.
Вычислительное устройство 42 управления второго каскада средства вычисления положения рулей соединено с вычислительным устройством 64 управления первого каскада средства управления приводами через единую линию однонаправленной связи средств управления, называемую второй аварийной линией 174 приводов. Вычислительное устройство 70 контроля первого каскада средства управления приводами соединено со второй аварийной линией 174 приводов через линию 176 связи средств управления в точке соединения, при этом указанная точка соединения находится близко к входу вычислительного устройства 64 управления первого каскада средства управления приводами.
Вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей соединено со второй главной линией 166 приводов через линию 178 связи средств управления в точке соединения, при этом указанная точка соединения находится близко к выходу вычислительного устройства 42 управления второго каскада средства вычисления положения рулей для получения кодированных положений рулей и проверки их достоверности.
Вычислительное устройство 44 управления третьего каскада средства вычисления положения рулей соединено с вычислительным устройством 68 управления третьего каскада средства управления приводами через единую линию однонаправленной связи средств управления, называемую третьей главной линией 180 приводов. Вычислительное устройство 74 контроля соединено с третьей главной линией 180 приводов через линию 182 связи средств управления в точке соединения, при этом указанная точка соединения находится близко к входу вычислительного устройства 68 управления третьего каскада средства управления приводами.
Вычислительное устройство 44 управления третьего каскада средства вычисления положения рулей соединено с вычислительным устройством 64 управления первого каскада средства управления приводами через единую линию однонаправленной связи средств управления, называемую третьей вспомогательной линией 184 приводов. Вычислительное устройство 70 контроля первого каскада средства управления приводами соединено с третьей вспомогательной линией 184 приводов через линию 186 связи средств управления в точке соединения, при этом указанная точка соединения находится близко к входу вычислительного устройства 64 управления первого каскада средства управления приводами.
Вычислительное устройство 44 управления третьего каскада средства вычисления положения рулей соединено с вычислительным устройством 66 управления второго каскада средства управления приводами через единую линию однонаправленной связи средств управления, называемую третьей аварийной линией 188 приводов. Вычислительное устройство 72 контроля второго каскада средства управления приводами соединено с третьей аварийной линией 188 приводов через линию 190 связи средств управления. Линия 190 связи средств управления соединена с точкой соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 66 управления второго каскада средства управления приводами.
Вычислительное устройство 50 контроля третьего каскада средства вычисления положения рулей соединено с третьей главной линией 180 приводов через линию 192 связи средств управления. Эта линия 192 связи средств управления подсоединена в точке соединения; при этом указанная точка соединения находится близко к выходу вычислительного устройства 44 управления третьего каскада средства вычисления положения рулей для получения кодированных положений рулей и проверки их достоверности.
Вычислительные устройства 64, 66, 68 управления первого, второго и третьего каскадов средства управления приводами выполнены с возможностью передачи команд приведения в действие на приводы аэродинамических рулей через не показанные линии связи.
Датчики, потенциометры и другие приборы измеряют перемещения приводов и передают значения этих измерений в вычислительные устройства 64, 66, 68 управления и в вычислительные устройства 70, 72, 74 контроля.
Вычислительные устройства 64, 66, 68 управления выполнены с возможностью определения положений рулей в зависимости от полученных измерений. Определенные таким образом положения рулей являются реальными положениями рулей в отличие от задаваемых положений рулей, передаваемых от средства 6 вычисления положения рулей в средство 8 управления приводами. В дальнейшем определенные таким образом положения рулей будут называться реальными положениями рулей. Вычислительные устройства 70, 72, 74 контроля проверяют достоверность вычислений, производимых вычислительными устройствами 64, 66, 68 в том, что касается реальных положений рулей.
Вычислительные устройства 64, 66, 68 управления выполнены с возможностью кодирования реальных положений рулей и их передачи в вычислительные устройства 40, 42, 44 управления и в вычислительные устройства 46, 48, 50 контроля средства 6 вычисления положения рулей.
Вычислительные устройства 40, 42, 44 управления и вычислительные устройства 46, 48, 50 контроля средства 6 вычисления положения рулей выполнены с возможностью вычисления команд усилия путем сравнения реальных положений рулей с задаваемыми положениями рулей для получения траекторий полета. Вычислительные устройства 40, 42, 44 управления выполнены с возможностью кодирования команд усилия и их передачи в вычислительные устройства 16, 18, 20 управления и в вычислительные устройства 22, 24, 26 контроля средства 4 управления пилотированием.
Вычислительные устройства 16, 18, 20 управления средства 4 управления пилотированием выполнены с возможностью выработки команд по трем осям в зависимости от команд усилия и с возможностью передачи этих команд по трем осям на три не показанных привода.
Система управления в соответствии с изобретением содержит линии однонаправленной связи, обеспечивающие передачу данных от средства 8 управления приводами в средство 6 вычисления положения рулей и от средства 6 вычисления положения рулей в средство 4 управления пилотированием. Эти линии связи показаны на фиг. 4. Компоновка этих линий связи, а также способ работы вычислительных устройств управления и контроля идентичны описанным выше для обеспечения связи в обратном направлении, то есть от средства 4 управления пилотированием к средству 6 вычисления положения рулей и от средства 6 вычисления положения рулей к средству управления приводами. Их повторное описание опускается. Ниже будут описаны только линии связи. Поскольку направление передачи данным сменилось на обратное, выходы вычислительных устройств в дальнейшем тексте описания называются входами, а входы в дальнейшем называются выходами.
В частности, вычислительное устройство 64 управления первого каскада средства управления приводами соединено с вычислительным устройством 40 управления первого каскада средства вычисления положения рулей через единую линию однонаправленной связи, называемую первой главной обратной линией 194 приводов.
Первая главная обратная линия 194 приводов выполнена с возможностью передачи реальных положений рулей от вычислительного устройства 64 управления в вычислительное устройство 40 управления.
Вычислительное устройство 70 контроля первого каскада средства управления приводами соединено с первой главной обратной линией 194 приводов через линию 196 связи средств управления в точке соединения; указанная точка соединения находится между концом цепи вычисления, обработки и кодирования данных и выходом вычислительного устройства 64 управления первого каскада средства управления приводами.
Блок 42 кодирования выполнен с возможностью декодирования реальных положений рулей, полученных вычислительным устройством 70 контроля через линию 196 связи средств управления. Вычислительное устройство 70 выполнено с возможностью проверки достоверности реальных положений рулей, декодированных блоком 82 кодирования. Если декодированные реальные положения рулей отличаются от реальных положений рулей, переданных вычислительным устройством 64 управления перед кодированием через линию 75 связи, то вычислительное устройство 64 управления и вычислительное устройство 70 контроля первого каскада средства управления приводами отключаются, и их подменяют вычислительное устройство 66 управления и вычислительное устройство 72 второго каскада средства управления приводами.
Как и при связи в противоположном направлении, линия 196 связи средств управления, блок 82 кодирования и вычислительное устройство 70 контроля первого каскада средства управления приводами позволяют проверять реальные положения рулей в формате, передаваемом в средство вычисления положения рулей, поэтому можно проверить всю цепь вычисления и обработки данных вычислительного устройства 64 управления, в том числе в части кодирования.
Вычислительное устройство 46 контроля первого каскада средства 6 вычисления положения рулей соединено с первой главной обратной линией 194 приводов через линию 198 связи средств управления в точке соединения; при этом указанная точка соединения находится в месте, близком к входу вычислительного устройства 40 управления.
Предпочтительно в летательном аппарате между корпусом 77, содержащим первый каскад средства управления приводами, и корпусом 49, содержащим первый каскад средства вычисления положения рулей, проходит только один провод, то есть первая главная обратная линия однонаправленной связи приводов, а не два провода 116, 118, как в известной системе управления.
Блок 58 кодирования декодирует реальные положения рулей, полученные через линию 198 связи средств управления. Вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей использует реальные положения рулей, декодированные блоком 58 кодирования, для вычисления команд усилия и для проверки вычислений, производимых вычислительным устройством 40 управления первого каскада средства вычисления положения рулей.
Вычислительное устройство 64 управления первого каскада средства управления приводами соединено с вычислительным устройством 42 управления второго каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую первой вспомогательной обратной линией 200 приводов. Вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей соединено с первой вспомогательной обратной линией 200 приводов через линию 202 связи средств управления в точке соединения; при этом указанная точка соединения находится в месте, близком к входу вычислительного устройства 42 управления второго каскада средства вычисления положения рулей.
Вычислительное устройство 64 управления выполнено с возможностью передачи кодированных положений рулей в вычислительное устройство 42 управления и в вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей через первую вспомогательную обратную линию 200 приводов.
Точно так же, вычислительное устройство 64 управления первого каскада средства управления приводами соединено с вычислительным устройством 44 управления третьего каскада средства вычисления положения рулей через линию однонаправленной связи средств управления, называемую первой аварийной обратной линией 204 приводов. Вычислительное устройство 50 контроля третьего каскада средства вычисления положения рулей соединено с первой аварийной обратной линией 204 приводов через линию 206 связи средств управления в точке соединения; при этом указанная точка соединения находится в месте, близком к входу вычислительного устройства 42 управления третьего каскада средства вычисления положения рулей.
Вычислительное устройство 64 управления выполнено с возможностью передачи кодированных положений рулей в вычислительное устройство 44 управления и в вычислительное устройство 50 контроля третьего каскада средства вычисления положения рулей через первую аварийную обратную линию 204 приводов.
Описанные выше схема соединения и способ работы используются также для вычислительных устройств управления и контроля второго каскада и третьего каскада средства управления приводами, и их повторное описание опускается. Ниже будут описаны только линии связи между ними.
Вычислительное устройство 66 управления второго каскада средства управления приводами соединено с вычислительным устройством 42 управления второго каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую второй главной обратной линией 208 приводов. Вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей соединено со второй главной обратной линией 208 приводов через линию 210 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 42 управления второго каскада средства вычисления положения рулей. Вычислительное устройство 72 второго каскада средства управления приводами соединено со второй главной обратной линией 208 приводов через линию 220 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 66 управления второго каскада средства управления приводами.
Вычислительное устройство 66 управления второго каскада средства управления приводами соединено с вычислительным устройством 44 управления третьего каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую второй вспомогательной обратной линией 212 приводов.
Вычислительное устройство 50 контроля третьего каскада средства вычисления положения рулей соединено со второй вспомогательной обратной линией 212 приводов через линию 214 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 44 управления третьего каскада средства вычисления положения рулей.
Вычислительное устройство 66 управления второго каскада средства управления приводами соединено с вычислительным устройством 40 управления первого каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую второй аварийной обратной линией 216 приводов.
Вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей соединено со второй аварийной обратной линией 216 приводов через линию 218 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 40 управления первого каскада средства вычисления положения рулей.
Вычислительное устройство 68 управления третьего каскада средства управления приводами соединено с вычислительным устройством 44 управления третьего каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую третьей главной обратной линией 222 приводов.
Вычислительное устройство 50 контроля третьего каскада средства вычисления положения рулей соединено с третьей главной обратной линией 222 приводов через линию 224 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 44 управления третьего каскада средства вычисления положения рулей.
Вычислительное устройство 74 контроля третьего каскада средства управления приводами соединено с третьей главной обратной линией 222 приводов через линию 226 связи средств управления в точке соединения, близкой к входу вычислительного устройства 68 управления.
Вычислительное устройство 68 управления третьего каскада средства управления приводами соединено с вычислительным устройством 40 управления первого каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую третьей вспомогательной обратной линией 228 приводов. Вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей соединено с третьей вспомогательной обратной линией 228 приводов через линию 230 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 40 управления первого каскада средства вычисления положения рулей.
Вычислительное устройство 68 управления третьего каскада средства управления приводами соединено с вычислительным устройством 42 управления второго каскада средства вычисления положения рулей через единую линию однонаправленной связи средств управления, называемую третьей аварийной обратной линией 232 приводов. Вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей соединено с третьей аварийной обратной линией 232 приводов через линию 234 связи средств управления в точке соединения; при этом указанная точка соединения находится близко к входу вычислительного устройства 42 управления первого каскада средства вычисления положения рулей.
Вычислительные устройства 64, 66, 68 управления первого, второго и третьего каскадов средства управления приводами выполнены с возможностью передачи кодированных реальных положений рулей в вычислительные устройства 40, 42, 44 управления и в вычислительные устройства 46, 48, 50 контроля первого, второго и третьего каскадов средства управления приводами через линии 194-234 однонаправленной связи средств управления.
Далее следует описание линий связи, обеспечивающих передачу данных от средства вычисления положения рулей в средство управления пилотированием.
Вычислительное устройство 40 управления первого каскада средства вычисления положения рулей соединено с вычислительным устройством 16 управления первого каскада средства управления пилотированием через единую линию однонаправленной связи, называемую первой обратной линией 236 усилия.
Вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей соединено с первой обратной линией 236 усилия через линию 238 связи средств управления в точке соединения; при этом указанная точка соединения находится между концом цепи вычисления, обработки и кодирования данных и выходом вычислительного устройства 40 управления первого каскада средства вычисления положения рулей.
Блок 58 кодирования выполнен с возможностью декодирования команд усилия, принимаемых вычислительным устройством 46 контроля через линию 238 связи средств управления. Вычислительное устройство 46 контроля выполнено с возможностью проверки достоверности команд усилия, декодируемых блоком 58 кодирования. Если декодированные команды усилия отличаются от команд усилия, переданных вычислительным устройством 40 управления перед кодированием через линию 51 связи, то вычислительное устройство 40 управления и вычислительное устройство 46 контроля первого каскада средства вычисления положения рулей отключаются, их вместо них работают вычислительное устройство 42 управления и вычислительное устройство 48 контроля второго каскада 12 средства вычисления положения рулей.
Вычислительные устройства 22, 24, 26 контроля первого, второго и третьего каскадов средства управления пилотированием и вычислительные устройства 18, 20 управления второго и третьего каскадов средства управления пилотированием соединены с первой обратной линией 236 усилия через линию 240 связи средств управления, которая проходит внутри рукоятки 9 между всеми печатными платами рукоятки.
Вычислительное устройство 40 управления выполнено с возможностью передачи команд усилия в вычислительные устройства 16, 18, 20 управления и в вычислительные устройства 22, 24, 26 контроля средства управления пилотированием.
Вычислительное устройство 42 управления второго каскада средства вычисления положения рулей соединено с вычислительным устройством 18 управления второго каскада средства управления пилотированием через единую линию однонаправленной связи, называемую второй обратной линией 242 усилия.
Вычислительное устройство 48 контроля второго каскада средства вычисления положения рулей соединено со второй обратной линией 242 усилия через линию 244 связи средств управления в точке соединения; при этом указанная точка соединения находится между концом цепи вычисления, обработки и кодирования данных и выходом вычислительного устройства 42 управления второго каскада средства вычисления положения рулей.
Вычислительное устройство 48 контроля выполнено с возможностью проверки достоверности команд усилия, декодируемых блоком 60 кодирования.
Вычислительные устройства 22, 24, 26 первого, второго и третьего каскадов средства управления пилотированием и вычислительные устройства 20, 16 управления второго и первого каскадов средства управления пилотированием соединены со второй обратной линией 242 усилия через линию 246 связи средств управления, которая проходит внутри рукоятки 9 между всеми печатными платами рукоятки.
Вычислительное устройство 42 управления выполнено с возможностью передачи команд усилия в вычислительные устройства 16, 18, 20 управления и в вычислительные устройства 22, 24, 26 контроля средства управления пилотированием.
Вычислительное устройство 44 управления третьего каскада средства вычисления положения рулей соединено с вычислительным устройством 20 управления третьего каскада средства управления пилотированием через единую линию однонаправленной связи, называемую третьей обратной линией 248 усилия.
Вычислительное устройство 50 контроля третьего каскада средства вычисления положения рулей соединено с третьей обратной линией 248 усилия через линию 250 связи средств управления в точке соединения; при этом указанная точка соединения находится между концом цепи вычисления, обработки и кодирования данных и выходом вычислительного устройства 44 управления третьего каскада средства вычисления положения рулей.
Вычислительное устройство 50 контроля выполнено с возможностью проверки достоверности команд усилия, декодируемых блоком 62 кодирования.
Вычислительные устройства 22, 24, 26 контроля первого, второго и третьего каскадов средства управления пилотированием и вычислительные устройства 16, 18 управления первого и второго каскадов средства управления пилотированием соединены с третьей обратной линией усилия через линию 252 связи средств управления, которая проходит внутри рукоятки 9 между всеми печатными платами рукоятки.
Вычислительное устройство 44 управления выполнено с возможностью передачи команд усилия в вычислительные устройства 16, 18, 20 управления и в вычислительные устройства 22, 24, 26 контроля средства управления пилотированием.
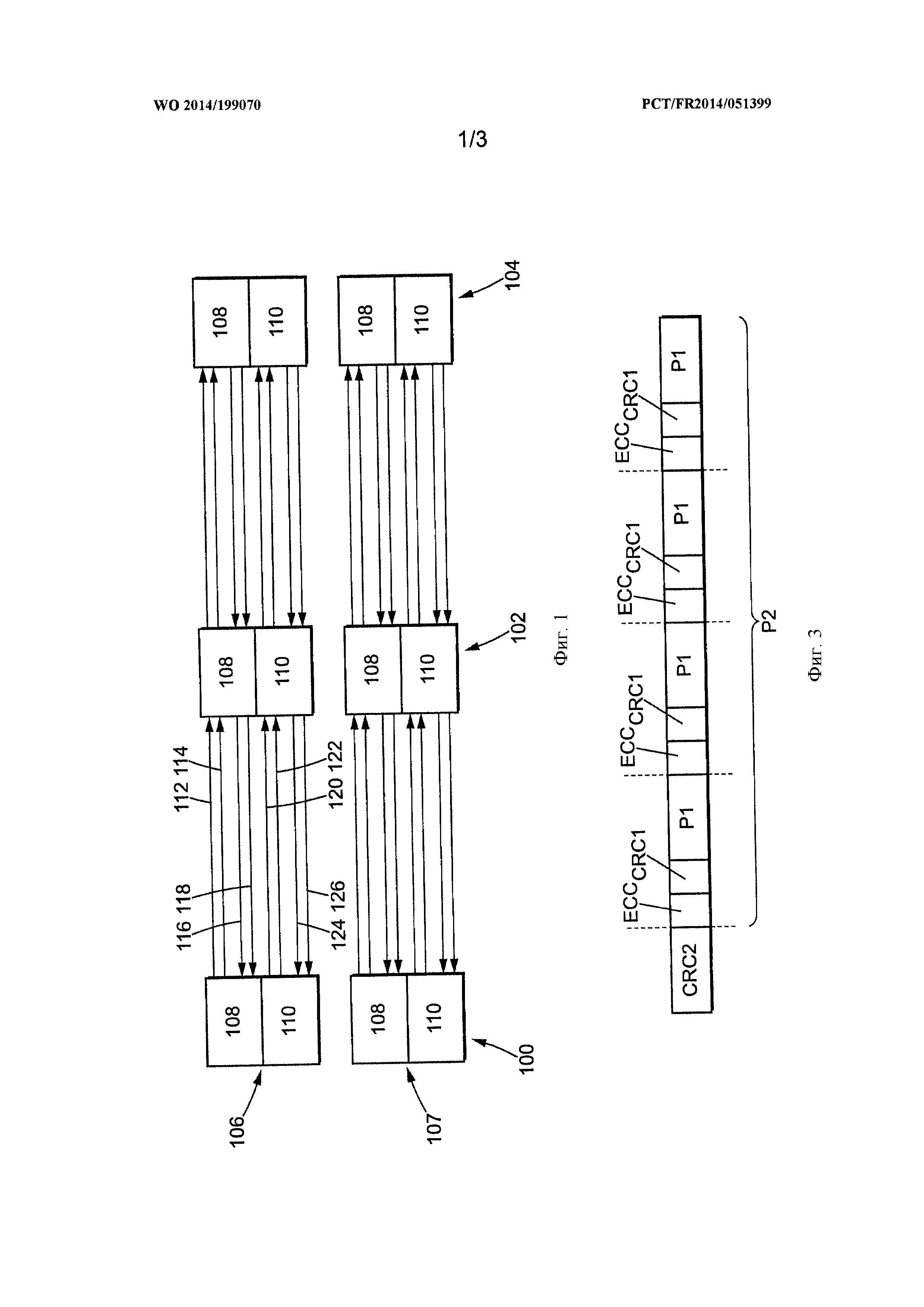
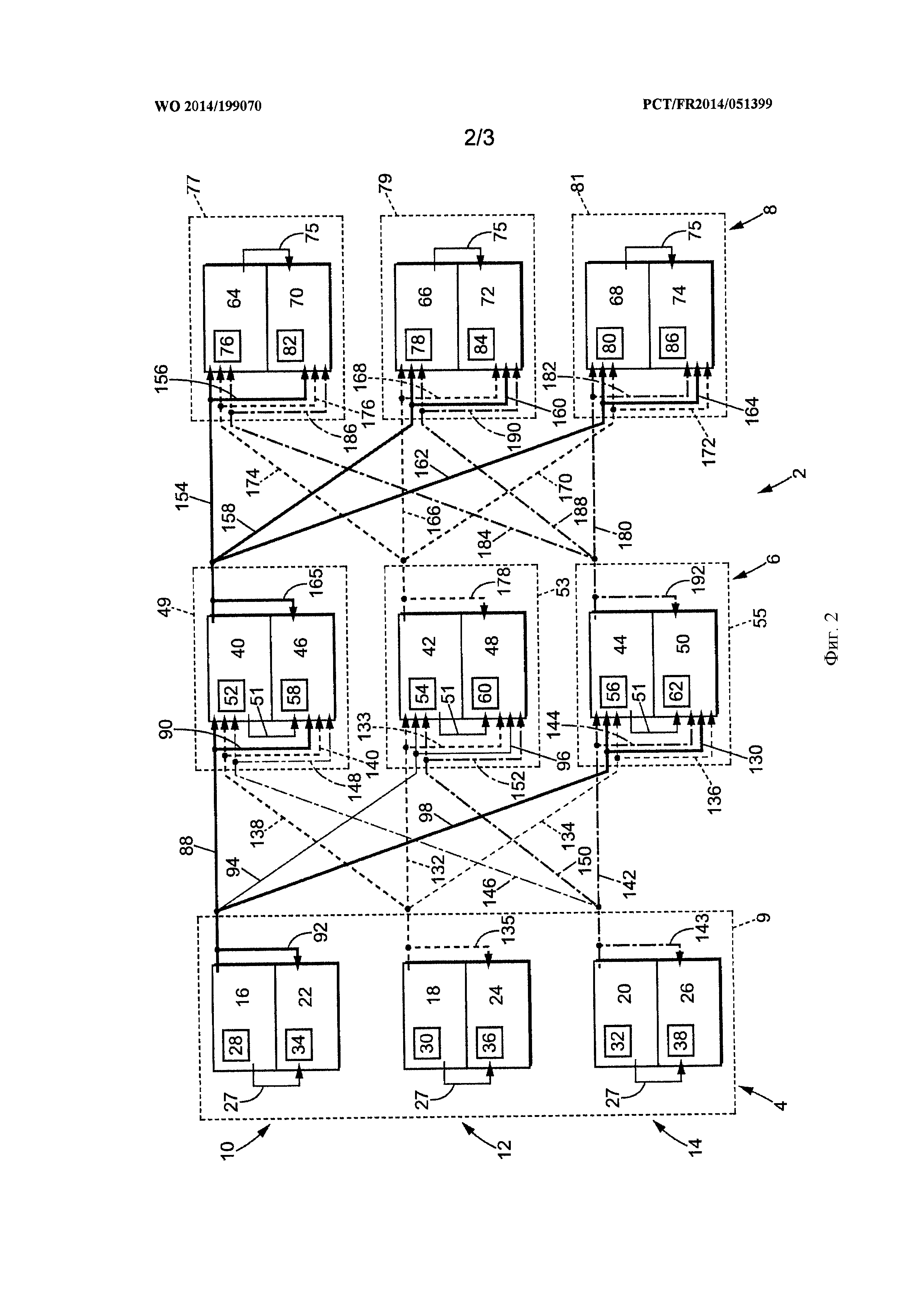
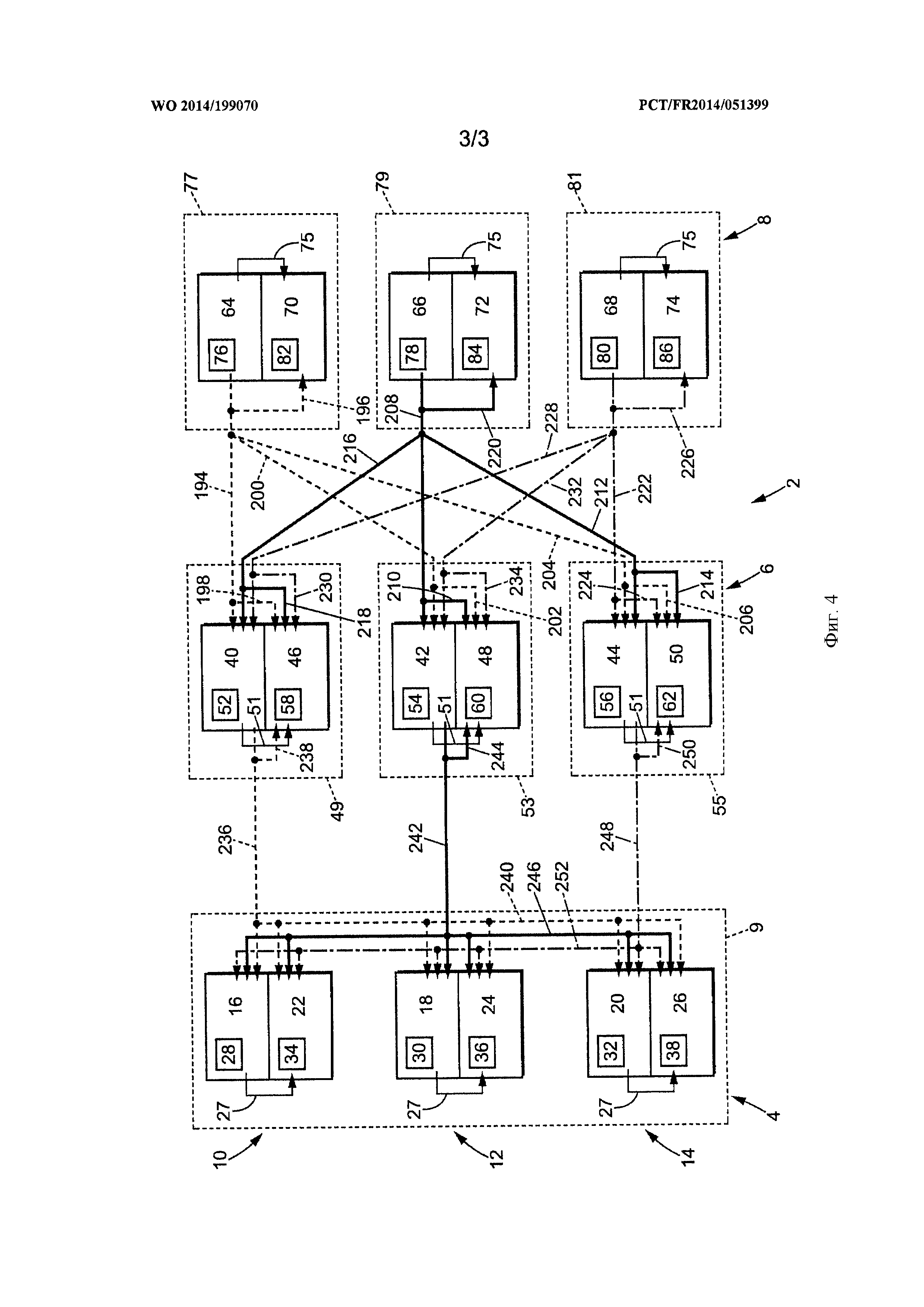
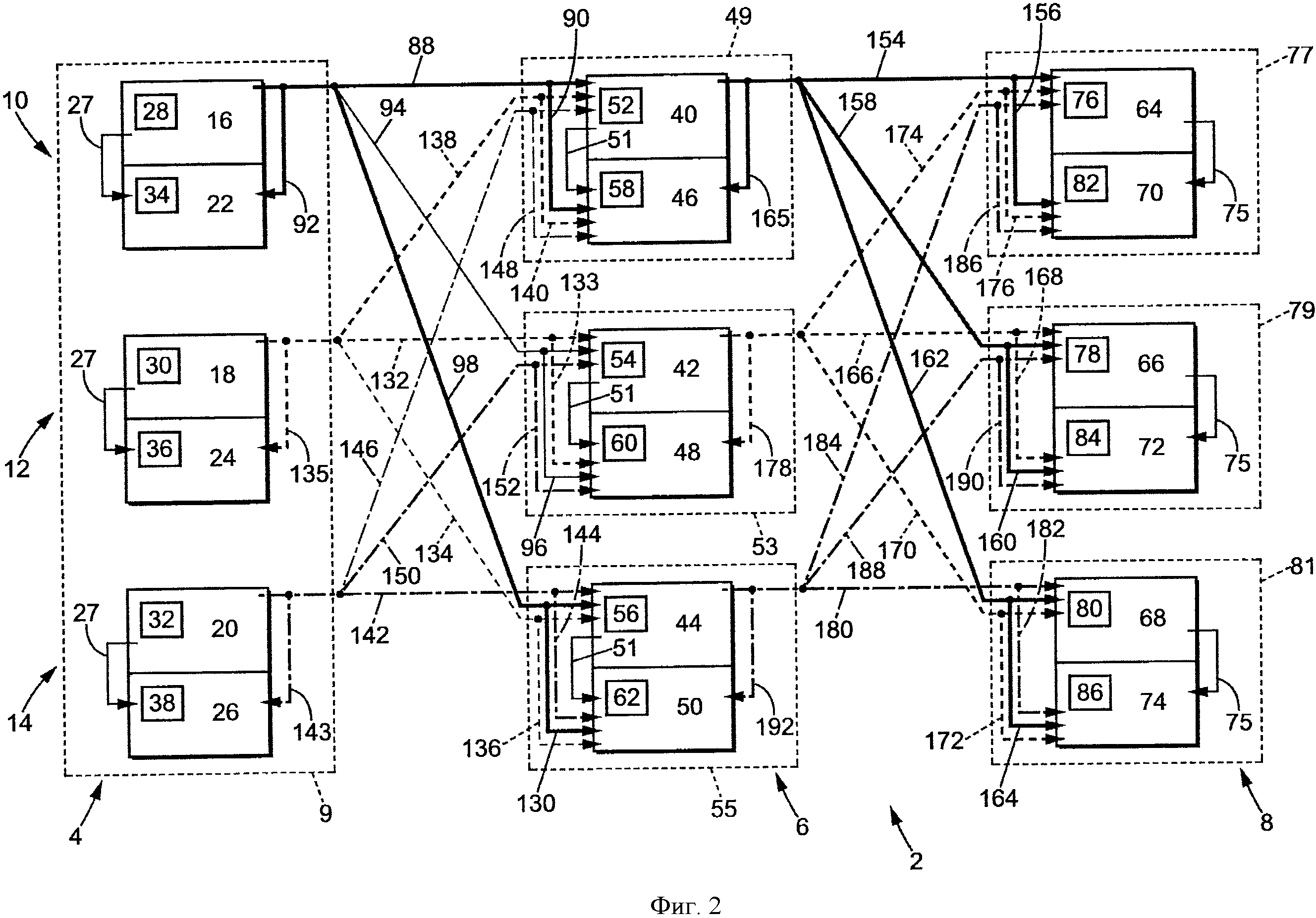
Устройство управления полетом для летательного аппарата
Оптоэлектронный прицел с модульной броневой защитой
Устройство соединения схемы или радиочастотного компонента, напечатанных на мягкой подложке, с коаксиальным проводом
Ротор электродвигателя с наружной оболочкой, образованной путем намотки, способ изготовления такого ротора и электродвигатель с таким ротором
Способ и моторизованное устройство наводки
Оптоэлектронная система наблюдения с переменным оптическим полем
Устройство ввода/вывода для передачи и/или приема данных на и/или от устройства управления
Блокируемый привод и соответствующий ограничитель момента
Способ геопозиционирования мобильных устройств, перемещающихся внутри замкнутой структуры
Способ навигации беспилотного аппарата в присутствии постороннего летательного аппарата и беспилотный аппарат для осуществления способа
Устройство для отображения критической и второстепенной информации и летательный аппарат, содержащий такое устройство
Способ проверки неразрывности передачи данных между главным входным блоком и главным выходным блоком
Способ и устройство направления летательного аппарата

