Результат интеллектуальной деятельности: Устройство получения информации о шумящем в море объекте
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и предназначено для определения параметров объектов, шумящих в море.
В понятие «информация о шумящем в море объекте» [1] вкладывают три основные характеристики: направление на шумящий объект, дистанция до объекта, класс шумности, под которым понимают разделение объектов на объекты малой шумности и объекты большой шумности. Для разделения объектов на классы шумности производят определение уровня шумности объекта в точке излучения. При этом предполагают, что к объектам малой шумности можно отнести подводные объекты, а к объектам большой шумности - боевые надводные корабли и гражданские суда. Понятно, что возможность определения глубины погружения объекта была бы желательна как для уточнения класса объекта, так и для получения более полной информации о нем.
Известно устройство [2] определения шумности объекта, основанное на оценке мощности принятого сигнала и дальнейшего пересчета этой оценки в предполагаемую точку излучения в горизонтальной плоскости. Для реализации такого подхода необходима предварительная оценка дистанции до шумящего объекта, которая используется как параметр. В устройстве не предполагается учет глубины погружения объекта, то есть не учитывается явление фокусировки сигнала после многолучевой рефракции в вертикальной плоскости при распространении в среде, которое может значительно изменять мощность сигнала, принятого с разных глубин погружения источника, при одном горизонтальном удалении.
Известно устройство [3] оценки дистанции до шумящего в море объекта, которое использует физическое явление частотно-зависимого затухания сигнала при распространении в среде. Устройство хорошо работает в мелком море, когда вследствие сильного влияния дна явлением рефракции лучей можно пренебречь. Однако в глубоком море, при наличии зональной структуры гидроакустического поля, явление рефракции проявляется сильно. В результате происходит фокусировка лучей, которая вносит вклад в численные параметры затухания сигнала, сравнимый по значению величин с параметрами частотно-зависимого затухания. При оценке дистанции до объекта будет допущена ошибка смещения, которая приведет к ошибке смещения при дальнейшем определении шумности объекта.
Известно устройство реализации способа получения информации о шумящих в море объектах [4], которое позволяет обнаружить объект и определить направление на него. Однако устройство не позволяет получить полную информацию о шумящем в море объекте, а именно дистанцию и глубину.
Наиболее близким аналогом по используемым признакам и решаемым задачам к предлагаемому изобретению является устройство получения информации о шумящем в море объекте [5], которое принято за прототип.
Устройство-прототип содержит следующие блоки: последовательно соединенные многоэлементную акустическую приемную антенну шумопеленгования, блок формирования веера характеристик направленности в горизонтальной и вертикальной плоскостях, блок полосовой фильтрации, детектор, накопитель, блок расчета отношения сигнал/помеха, блок обнаружения объекта с определением направления на него, блок формирования матрицы замера, блок формирования двумерной функции меры сходства, блок совместного определения дистанции и глубины и блок определения шумности, последовательно соединенные блок измерения вертикального разреза скорости звука, блок расчета поля и блок формирования матрицы прогноза по сетке дистанция-глубина, при этом второй выход блока формирования матрицы замера соединен со вторым входом блока определения шумности, первый выход блока формирования матрицы прогноза по сетке дистанция-глубина соединен со вторым входом блока формирования двумерной функции меры сходства, а второй выход блока формирования матрицы прогноза по сетке дистанция-глубина соединен с третьим входом блока определения шумности.
Недостатком устройства-прототипа является необходимость применения аппаратуры, обеспечивающей большой объем вычислений. Это связано с тем, что расчет совокупности мер сходства между матрицей замера и матрицей прогноза в каждой точке сетки дистанция-глубина требует значительных вычислительных затрат.
Техническим результатом изобретения является уменьшение объема аппаратуры для получения информации о шумящем в море объекте вследствие сокращения числа вычислительных операций.
Для достижения данного технического результата в устройство получения информации о шумящем в море объекте, содержащее последовательно соединенные многоэлементную акустическую приемную антенну шумопеленгования, блок формирования веера характеристик направленности в горизонтальной и вертикальной плоскостях, блок полосовой фильтрации, детектор, накопитель, блок расчета отношения сигнал/помеха, блок обнаружения объекта с определением направления на него, блок формирования матрицы замера, также содержащее последовательно соединенные блок формирования двумерной функции меры сходства, блок совместного определения дистанции и глубины и блок определения шумности, также содержащее последовательно соединенные блок измерения вертикального разреза скорости звука, блок расчета поля и блок формирования матрицы прогноза по сетке дистанция-глубина, при этом первый и второй выход блока формирования матрицы замера соединены со вторым входом блока определения шумности и первым входом блока формирования двумерной функции меры сходства, соответственно, а первый и второй выходы блока формирования матрицы прогноза по сетке дистанция-глубина соединен со вторым входом блока формирования двумерной функции меры сходства, и с третьим входом блока определения шумности, соответственно, введены новые блоки, а именно: блок определения положения глобального максимума в энергетической развертке в замере и последовательно соединенные блок определения положения глобального максимума в энергетической развертке для каждой точки прогноза по сетке дистанция-глубина, блок формирования инвертированных списков и блок предварительного отбора, при этом третий выход блока формирования матрицы замера соединен с входом блока определения положения глобального максимума в энергетической развертке в замере, выход блока определения положения глобального максимума в энергетической развертке в замере соединен со вторым входом блока предварительного отбора, выход блока предварительного отбора соединен с третьим входом блока формирования двумерной функции меры сходства, третий выход блока формирования матрицы прогноза по сетке дистанция-глубина соединен с входом блока определения положения глобального максимума в энергетической развертке для каждой точки прогноза по сетке дистанция-глубина, при этом блок определения положения глобального максимума в энергетической развертке в замере выполнен в виде вычислителя, реализующего расчет точного значения угла прихода сигнала в вертикальной плоскости путем интерполяции значений отношения сигнал/помеха в оптимальном частотном диапазоне (ЧД) и поиска положения глобального максимума в полученной развертке, блок определения положения глобального максимума в энергетической развертке для каждой точки прогноза по сетке дистанция-глубина выполнен в виде вычислителя, реализующего расчет точного значения угла прихода сигнала в вертикальной плоскости для каждой точки прогноза по дистанции и глубине путем интерполяции значений отношения сигнал/помеха и поиска положения глобального максимума в полученной развертке для каждого ЧД, блок формирования инвертированных списков выполнен в виде вычислительного устройства, осуществляющего формирование массива индексов, упорядоченного по возрастанию значения углового положения глобального максимума в энергетической развертке, для каждого ЧД, блок предварительного отбора выполнен в виде вычислителя, реализующего отбор индексов инвертированного списка по признаку требуемого значения близости к замеренному угловому положению глобального максимума в энергетической развертке.
Указанный технический результат достигается за счет того, что для сопоставления с данными замера поступают данные расчета прогноза параметров не для всех возможных точек по дистанции и глубине, а только для точек, отобранных в блоке предварительного отбора, число которых может быть в несколько раз меньше общего числа точек. Это приводит к соответствующему сокращению количества вычислений и позволяет снизить требования к мощности вычислительных средств и, следовательно, к общему объему аппаратуры.
Для реализации предварительного отбора формируется последовательность индексов, упорядоченная по возрастанию значения углового положение глобального максимума в энергетической развертке, для каждого ЧД в прогнозе. Эта упорядоченная последовательность индексов используется для быстрого поиска тех значений дальности и глубины, для которых обеспечивается заданная мера близости к замеренному угловому положению глобального максимума в энергетической развертке.
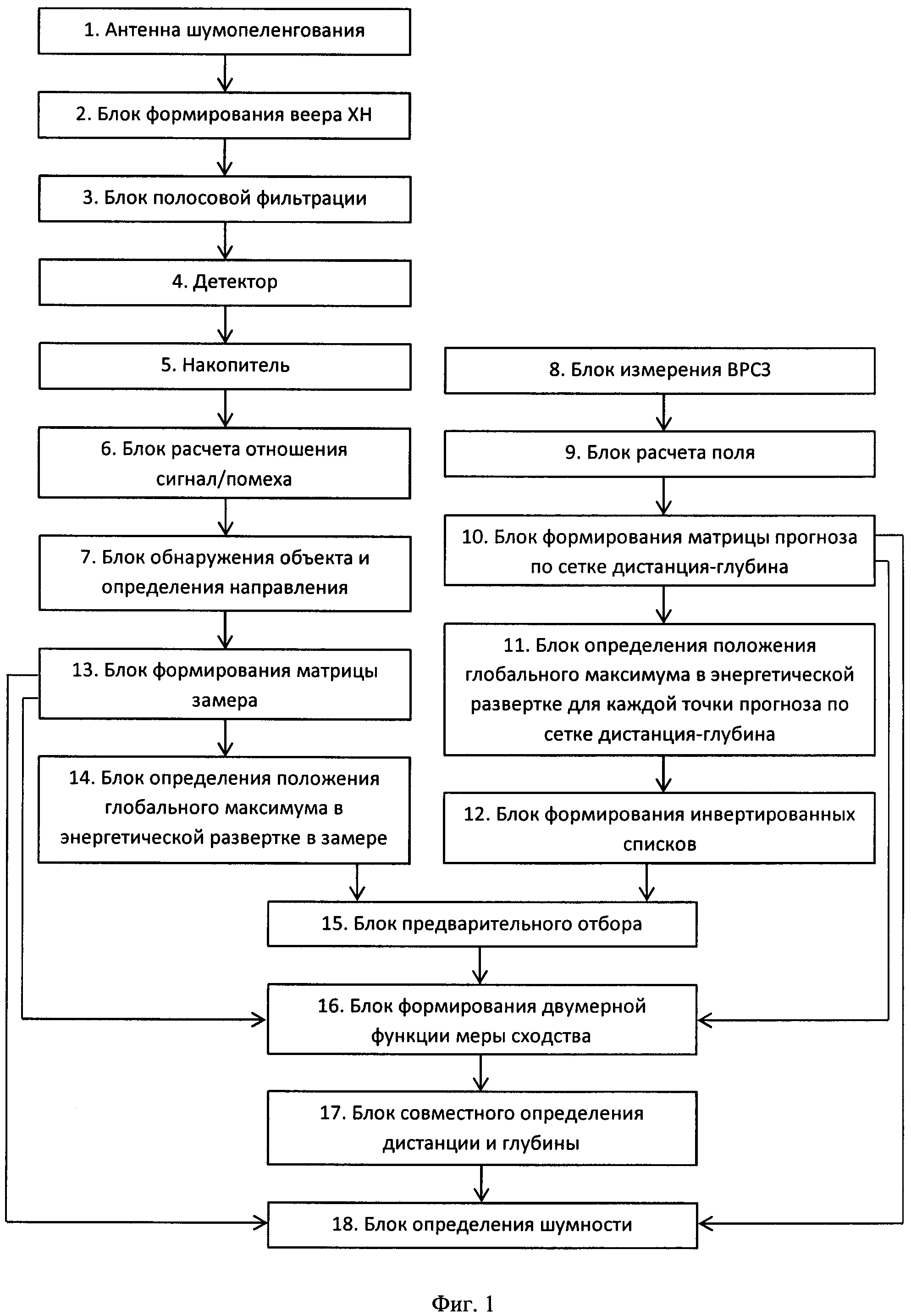
Сущность изобретения поясняется Фиг. 1, где приведена блок-схема предложенного устройства получения информации о шумящем в море объекте.
Заявленное устройство (Фиг. 1) содержит две ветки последовательно соединенных блоков.
В первой ветке последовательно соединены многоэлементная антенна шумопеленгования 1, блок 2 формирования веера характеристик направленности, блок 3 полосовой фильтрации, детектор 4, накопитель 5, блок 6 расчета отношения сигнал/ помеха, блок 7 обнаружения объекта и определения направления на него, блок 13 формирования матрицы замера, блок 14 определения положения глобального максимума в энергетической развертке в замере.
Во второй ветке последовательно соединены блок 8 измерения вертикального распределения скорости звука, блок 9 расчета поля, блок 10 формирования матрицы прогноза по сетке дистанция-глубина, блок 11 определения положения глобального максимума в энергетической развертке для каждой точки прогноза по сетке дистанция-глубина, блок 12 формирования инвертированных списков, блок 15 предварительного отбора, блок 16 формирования двумерной функции меры сходства, блок 17 совместного определения дистанции и глубины, блок 18 определения шумности. Во второй ветке существуют две дополнительные связи: между вторым выходом блока 10 и вторым входом блока 16, а также между третьим выходом блока 10 и вторым входом блока 18.
Две ветки устройства соединены между собой тремя линиями связи: выход блока 14 соединен со вторым входом блока 15, второй выход блока 13 соединен с третьим входом блока 16, третий выход блока 13 соединен с третьим входом блока 18.
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики и реализуется на основе применения цифровых устройств.
Многоэлементная антенна шумопеленгования известна из [6], при этом антенные модули могут быть выполнены согласно [7], а блок формирования веера характеристик направленности согласно [8]. Блок измерения вертикального распределения скорости звука может быть выполнен согласно [9]. Выполнение блоков формирования двумерной функции меры сходства и совместного определения дистанции и глубины приведено в прототипе [5]. Остальные блоки, в том числе вновь создаваемые, могут быть выполнены в модулях программируемых процессоров сигналов и в модулях универсальной части цифрового вычислительного комплекса [10]. Блок 12 может быть реализован на основе технических решений, приведенных в книге: Карпова Т.С. Базы данных: модели, разработка, реализация. СПб.: Питер, 2001. на С. 182-183.
Работа устройства осуществляется следующим образом. Шумовой сигнал объектов, принятый антенной 1, поступает в блок 2, в котором формируется веер характеристик направленности (каналы наблюдения) в горизонтальной плоскости (каналы по горизонту) и вертикальной плоскости (каналы по углу места). Далее сигналы всех каналов наблюдения независимо поступают в блок полосовой фильтрации, в котором осуществляется полосовая фильтрация с формированием частотных диапазонов в каждом канале наблюдения. В блоках 4, 5 и 6 производится квадратичное детектирование, накопление сигнала во времени и расчет отношения сигнал/помеха для каждого частотного диапазона в каждом канале наблюдения независимо. В блоке 7 осуществляется процедура обнаружения объекта и процедура определения направления на обнаруженный объект. В блоке 13 для каждого обнаруженного объекта формируется матрица замера, состоящая из отношений сигнал/помеха в совокупности частотных диапазонов во всех каналах по углу места. В блоке 14, куда поступает матрица замера, для каждого обнаруженного объекта вычисляется точное значение угла прихода сигнала в вертикальной плоскости путем интерполяции значений отношения сигнал/помеха в оптимальном ЧД и поиска положения глобального максимума в полученной развертке.
В дальнейшую обработку в блок 15 поступает значение положения глобального максимума в энергетической развертке в замере для каждого обнаруженного объекта. По каждому объекту ведется независимая параллельная обработка в блоках 15, 16, 17, 18.
В блоке 8 производится измерение скорости звука в зависимости от глубины в месте акватории, в котором находится носитель устройства. Таблица измеренных значений скорости звука поступает в блок 9, в котором производится расчет траекторий звуковых лучей в плоскости дистанция-глубина и расчет аномалии распространения сигнала вдоль траектории каждого луча. В блоке 10, куда поступает аномалия распространения сигнала, производится формирование матрицы прогноза по сетке дистанция-глубина. Матрица прогноза в каждой точке сетки содержит отношения сигнал/помеха для совокупности частотных диапазонов приемной части устройства для всех каналов устройства по углу места. При расчете отношений сигнал/помеха учитываются как аномалия распространения сигнала в текущих гидролого-акустических условиях, так и частотно-зависимое затухание сигнала в среде. Расчет производится для единичной шумности сигнала в источнике. В блоке 11, куда поступает матрица прогноза, для каждой точки сетки прогноза по дистанции и глубине выполняется интерполяция значений отношения сигнал/помеха в каждом ЧД и поиск положения глобального максимума в полученной развертке. Таким образом, для каждой точки сетки прогноза вычисляется значения положения глобального максимума в энергетической развертке (по одному для каждого ЧД). В блоке 12, куда поступают значения положений глобального максимума для каждой точки сетки прогноза по дистанции и глубине, осуществляется формирование массивов индексов (по одному для каждого ЧД), упорядоченных по возрастанию значения углового положения глобального максимума в энергетической развертке.
В блок 15 для каждого объекта, обнаруженного в блоке 7, из блока 14 поступает значение положения глобального максимума в энергетической развертке в замере, а из блока 12 поступает инвертированный список, соответствующий оптимальному ЧД замера. В блоке 15 осуществляется отбор индексов инвертированного списка, соответствующего оптимальному ЧД замера, по признаку требуемого значения близости к замеренному угловому положению глобального максимума в энергетической развертке.
В блок 16 для каждого объекта, обнаруженного в блоке 7, из блока 13 поступает матрица замера, из блока 10 матрица прогноза по сетке дистанция-глубина, из блока 15 - совокупности дальностей и глубин отобранных точек. В блоке 16 осуществляется расчет совокупности мер сходства между матрицей замера и матрицей прогноза для каждой из отобранных точек сетки дистанция-глубина, из которых формируется двумерная функция меры сходства в зависимости от двух величин: дистанция и глубина. В качестве мер сходства может использоваться любая из известных мер сходства, например, коэффициент корреляции или евклидово расстояние. Расчет мер сходства осуществляется только для отобранных точек, что позволяет кардинально сократить объем вычислений.
Из блока 16 функция мер сходства поступает в блок 17, реализующий поиск аргументов двумерной функции мер сходства, при которых она имеет экстремум: максимум при использовании коэффициента корреляции или минимум при использовании евклидова расстояния. Полученные аргументы функции мер сходства являются оценками параметров дистанции до объекта и глубины погружения объекта.
В блок 18 поступают: из блока 13 матрица замера, из блока 10 матрицы прогноза по сетке дистанция-глубина, из блока 17 полученные оценки дистанции и глубины. В блоке 18 производится выбор матрицы прогноза, соответствующей полученным значениям дистанции и глубины, выбор частотного диапазона и канала по углу места, в которых отношение сигнал/помеха матрицы замера максимально, и расчет шумности объекта путем деления выбранного отношения сигнал/помеха из матрицы замера на выбранное отношение сигнал/помеха в матрице прогноза.
Итак, уменьшение объема аппаратуры для получения информации о шумящем в море объекте достигается за счет того, что расчет мер сходства осуществляется только для точек, отобранных в блоке предварительного отбора.
В результате моделирования для гидрологических условий Норвежского, Японского и Белого морей получено, что в стратифицированной среде, в условиях подводного звукового канала выигрыш в объеме вычислений составляет от 30 до 100 раз, что позволяет приблизительно во столько же раз уменьшить массу и объем аппаратуры для получения информации о шумящем в море объекте, либо отказаться от использования более дорогой аппаратуры повышенной вычислительной мощности.
Таким образом, поставленная задача успешно решается.
Источники информации
1. Величкин С.М., Миронов Д.Д., Антипов В.А., Зеленкова И.Д., Перельмутер Ю.С. Патент РФ №2156984 от 27.09.2000. Способ получения информации о шумящем в море объекте и способ получения цветовых шкал для него. МПК G01S 3/84.
2. Кобылянский В.В. Разработка алгоритмов классификации шумовых гидроакустических сигналов на основе использования акустико-конструктивных характеристик объектов излучения и моделей среды. Диссертация на соискание ученой степени к.т.н. Л.: ЦНИИ «Морфизприбор». 1982.
3. Голубев А.Г., Мисюченко И.Л. Патент РФ №2128848 от 10.04.1999. Способ измерения дальности до источника шумоизлучения. МПК G01S.
4. Антипов В.А., Величкин С.М., Обчинец О.Г., Пастор А.Ю., Подгайский Ю.П., Янпольская А.А. Патент РФ №2353946 от 27.04.2009. Способ получения информации о шумящих в море объектах. МПК G01S 3/80.
5. Зеленкова И.Д., Волкова А.А., Никулин М.Н. Патент РФ №2590933 от 10.07.2016. Устройство получения информации о шумящем в море объекте. МПК G01S 3/80.
6. Литвиненко С.Л. Патент РФ №2515133 от 10.05.2014. Сферическая гидроакустическая антенна. МПК G01S 15/00.
7. Смарышев М.Д., Черняховский А.Е., Иванов A.M., Шатохин А.В., Селезнев И.А., Никандров В.А., Маляров К.В., Барсуков Ю.В. Патент РФ №2539819 от 27.01.2015. Антенный модуль с цифровым выходом. МПК H04R 1/44.
8. Баскин В.В., Гришман Г.Д., Казаков М.Н., Криницкий A.M., Леоненок Б.И., Смарышев М.Д. Патент РФ №2293449 от 10.02.2007. Способ формирования частотно независимой характеристики направленности рабочим сектором многоэлементной гидроакустической приемной круговой антенны. МПК H04R 1/44, G01S 15/02.
9. Полканов К.И., Романов В.Ю., Смелов Д.А. Патент РФ №2208223 от 10.07.2003. Измеритель скорости звука в жидких средах. МПК G01H 5/00.
10. Бетелин В.Б., Капустин Г.И., Кокурин В.А., Корякин Ю.А., Лисс А.Р., Немытов А.И., Першин А.С., Рыжиков А.В., Челпанов А.В., Шалин С.А. Патент РФ №2207620 от 10.03.2003. Цифровой вычислительный комплекс для обработки сигналов в гидроакустических системах. МПК G06F 15/16, G01S 15/88.
Устройство получения информации о шумящем в море объекте, содержащее последовательно соединенные многоэлементную акустическую приемную антенну шумопеленгования, блок формирования веера характеристик направленности в горизонтальной и вертикальной плоскостях, блок полосовой фильтрации, детектор, накопитель, блок расчета отношения сигнал/помеха, блок обнаружения объекта с определением направления на него, блок формирования матрицы замера, также содержащее последовательно соединенные блок формирования двумерной функции меры сходства, блок совместного определения дистанции и глубины и блок определения шумности, также содержащее последовательно соединенные блок измерения вертикального разреза скорости звука, блок расчета поля и блок формирования матрицы прогноза по сетке дистанция-глубина, при этом первый и второй выход блока формирования матрицы замера соединены со вторым входом блока определения шумности и первым входом блока формирования двумерной функции меры сходства, соответственно, а первый и второй выходы блока формирования матрицы прогноза по сетке дистанция-глубина соединен со вторым входом блока формирования двумерной функции меры сходства, и с третьим входом блока определения шумности, соответственно, отличающееся тем, что введены новые блоки: блок определения положения глобального максимума в энергетической развертке в замере и последовательно соединенные блок определения положения глобального максимума в энергетической развертке для каждой точки прогноза по сетке дистанция-глубина, блок формирования инвертированных списков и блок предварительного отбора, при этом третий выход блока формирования матрицы замера соединен с входом блока определения положения глобального максимума в энергетической развертке в замере, выход блока определения положения глобального максимума в энергетической развертке в замере соединен со вторым входом блока предварительного отбора, выход блока предварительного отбора соединен с третьим входом блока формирования двумерной функции меры сходства, третий выход блока формирования матрицы прогноза по сетке дистанция-глубина соединен с входом блока определения положения глобального максимума в энергетической развертке для каждой точки прогноза по сетке дистанция-глубина, при этом блок определения положения глобального максимума в энергетической развертке в замере выполнен в виде вычислителя, реализующего расчет точного значения угла прихода сигнала в вертикальной плоскости путем интерполяции значений отношения сигнал/помеха в оптимальном ЧД и поиска положения глобального максимума в полученной развертке, блок определения положения глобального максимума в энергетической развертке для каждой точки прогноза по сетке дистанция-глубина выполнен в виде вычислителя, реализующего расчет точного значения угла прихода сигнала в вертикальной плоскости для каждой точки прогноза по дистанции и глубине путем интерполяции значений отношения сигнал/помеха и поиска положения глобального максимума в полученной развертке для каждого ЧД, блок формирования инвертированных списков выполнен в виде вычислительного устройства, осуществляющего формирование массива индексов, упорядоченного по возрастанию значения углового положения глобального максимума в энергетической развертке, для каждого ЧД, блок предварительного отбора выполнен в виде вычислителя, реализующего отбор индексов инвертированного списка по признаку требуемого значения близости к замеренному угловому положению глобального максимума в энергетической развертке.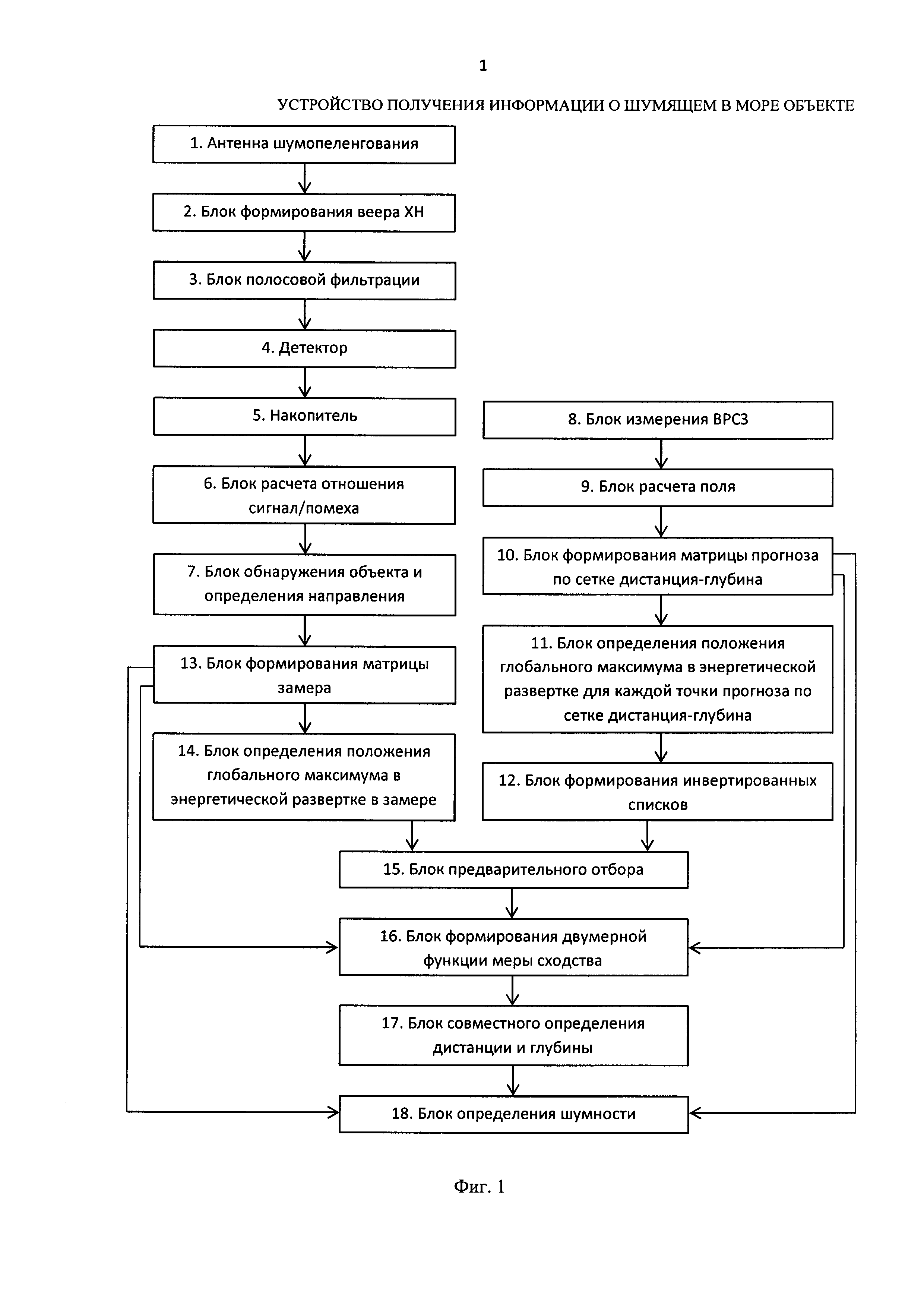
Активный гидролокатор
Способ обработки гидролокационной информации
Система и способ измерения акустических характеристик антенн с помощью подводного аппарата
Способ измерения скорости движения цели гидролокатором
Способ определения координат движущихся источников излучения пассивным гидролокатором
Способ обработки гидролокационной информации
Способ определения глубины погружения объекта
Способ классификации эхо-сигнала гидролокатора
Система шумопеленгования гидроакустического комплекса подводной лодки
Система противоторпедной защиты гидроакустического комплекса подводной лодки
Способ обработки сигнала шумоизлучения объекта
Гидроакустическая приемная многоэлементная антенна выпуклой формы двойной кривизны, размещаемая в носовой оконечности носителя
Устройство получения информации о шумящем в море объекте
Способ определения координат морской шумящей цели
Способ определения координат морской шумящей цели

