Результат интеллектуальной деятельности: Способ определения координат морской шумящей цели
Вид РИД
Изобретение
Изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения морских целей по их шумоизлучению.
Одной из актуальных практических задач гидроакустики является определение координат цели по данным шумопеленгаторной станции (далее - ШПС). Для решения этой задачи предложено большое число способов [1].
Группа способов базируется на использовании измеренной автокорреляционной функции (АКФ) широкополосного акустического сигнала для определения координат (дистанции и глубины) его источника [1-6]. Информация о координатах источника сигнала (цели) в измеренной АКФ заключена в расположении на оси абсцисс (времени) узкополосных интерференционных максимумов (далее - ИМ), обусловленных интерференцией коррелированных сигналов источника, пришедших на вход приемной гидроакустической антенны ШПС по различным лучам. Каждой паре лучей в АКФ (при достаточном отношении сигнал/помеха (далее - ОСП) [7, 8]) соответствует один ИМ с шириной, равной обратной величине эффективной полосы частот сигнала на входе антенны, и положением на оси абсцисс, равным абсолютной величине разности времен распространения сигнала по интерферирующим лучам. На фиг. 1 в качестве иллюстрации приведена АКФ сигнала источника, пришедшего на антенну по четырем лучам.
Экспериментальная апробация способов данной группы привела к выводу, что точность определения координат цели тем выше, чем больше ИМ обнаружено в измеренной АКФ сигнала. Обусловлено это тем, что при малом количестве ИМ (менее 5-6), обнаруженных в измеренной АКФ, велика вероятность получения многозначного решения задачи [8, 9]. На практике, в силу флюктуаций коэффициента когерентности интерферирующих лучей, имеющих место особенно в гидроакустических условиях, характеризующихся многократным их отражением от границ волновода, количество ИМ, обнаруживаемых в АКФ, как правило, невелико. Причем набор ИМ, обнаруживаемых в измеренной АКФ на последовательных интервалах времени измерения АКФ, не является постоянным.
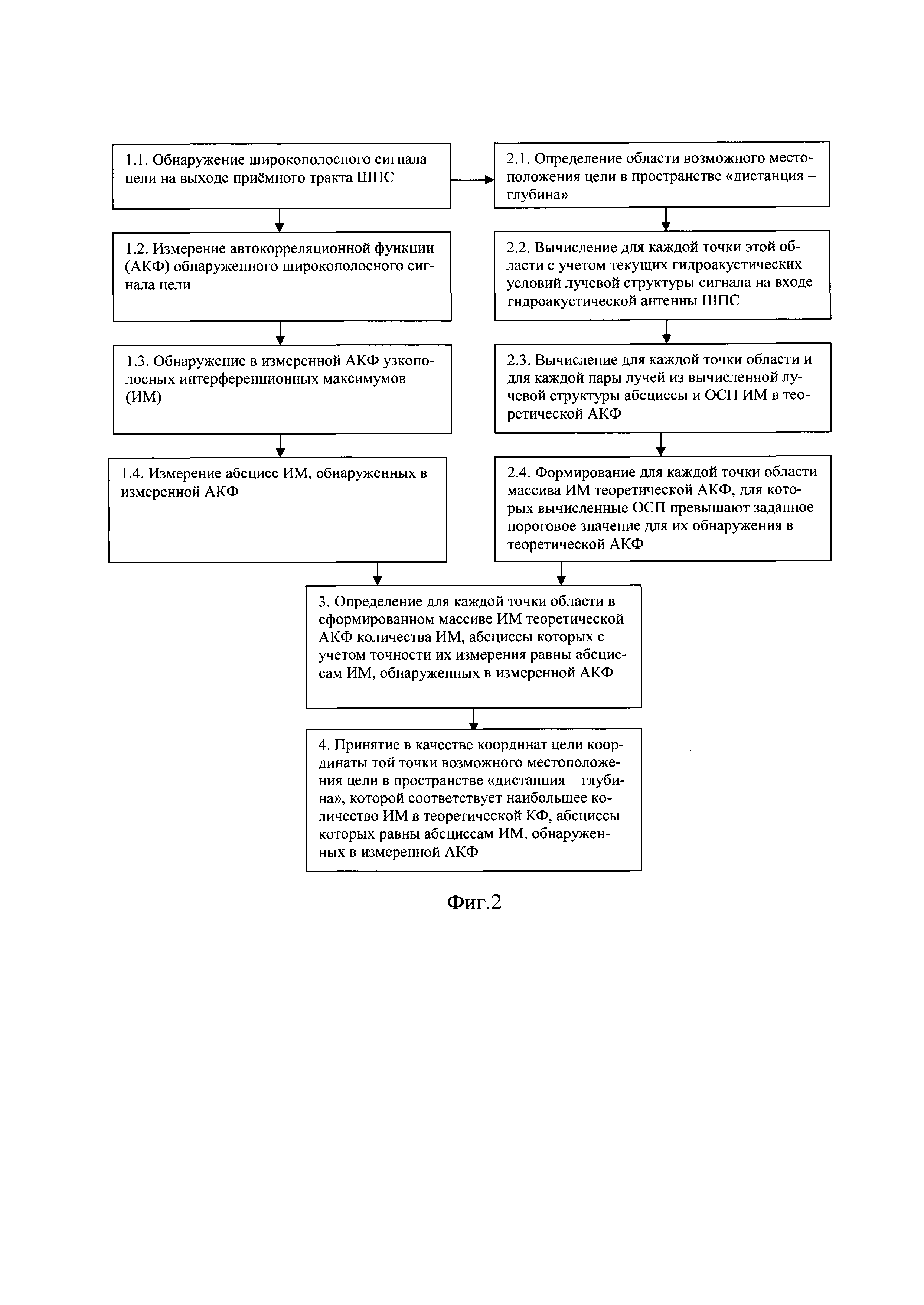
В качестве прототипа выбран описанный в работе [2] способ определения координат морской шумящей цели, включающий (фиг. 2):
- обнаружение широкополосного сигнала на выходе гидроакустической антенны ШПС (далее - антенна ШПС);
- измерение АКФ обнаруженного сигнала;
- обнаружение ИМ в измеренной АКФ и измерение их абсцисс (относительных запаздываний);
- определение области возможного местоположения цели в пространстве «дистанция - глубина»;
- для каждой точки этой области:
 с учетом текущих гидроакустических условий вычисление лучевой структуры сигнала на входе антенны ШПС;
с учетом текущих гидроакустических условий вычисление лучевой структуры сигнала на входе антенны ШПС;
для каждой возможной пары лучей вычисленной лучевой структуры вычисление абсциссы и ОСП ИМ (далее - расчетный ИМ), который должен быть образован в АКФ сигналами этой пары лучей;
формирование массива расчетных ИМ, для которых вычисленные значения ОСП превышают заданное пороговое значение для их обнаружения в АКФ;
определение в сформированном массиве расчетных ИМ количества ИМ, абсциссы которых с учетом точности их измерения равны абсциссам ИМ, обнаруженных в измеренной АКФ;
- принятие в качестве координат цели координаты той точки в области возможного местоположения цели в пространстве «дистанция - глубина», которой соответствует наибольшее количество расчетных ИМ, абсциссы которых равны абсциссам ИМ, обнаруженных в измеренной АКФ.
Решаемая техническая проблема - повышение эксплуатационных характеристик шумопеленгаторной станции.
Технический результат, обеспечиваемый изобретением, - повышение точности определения координат морской шумящей цели.
Указанный технический результат достигается путем применения следующего технического решения.
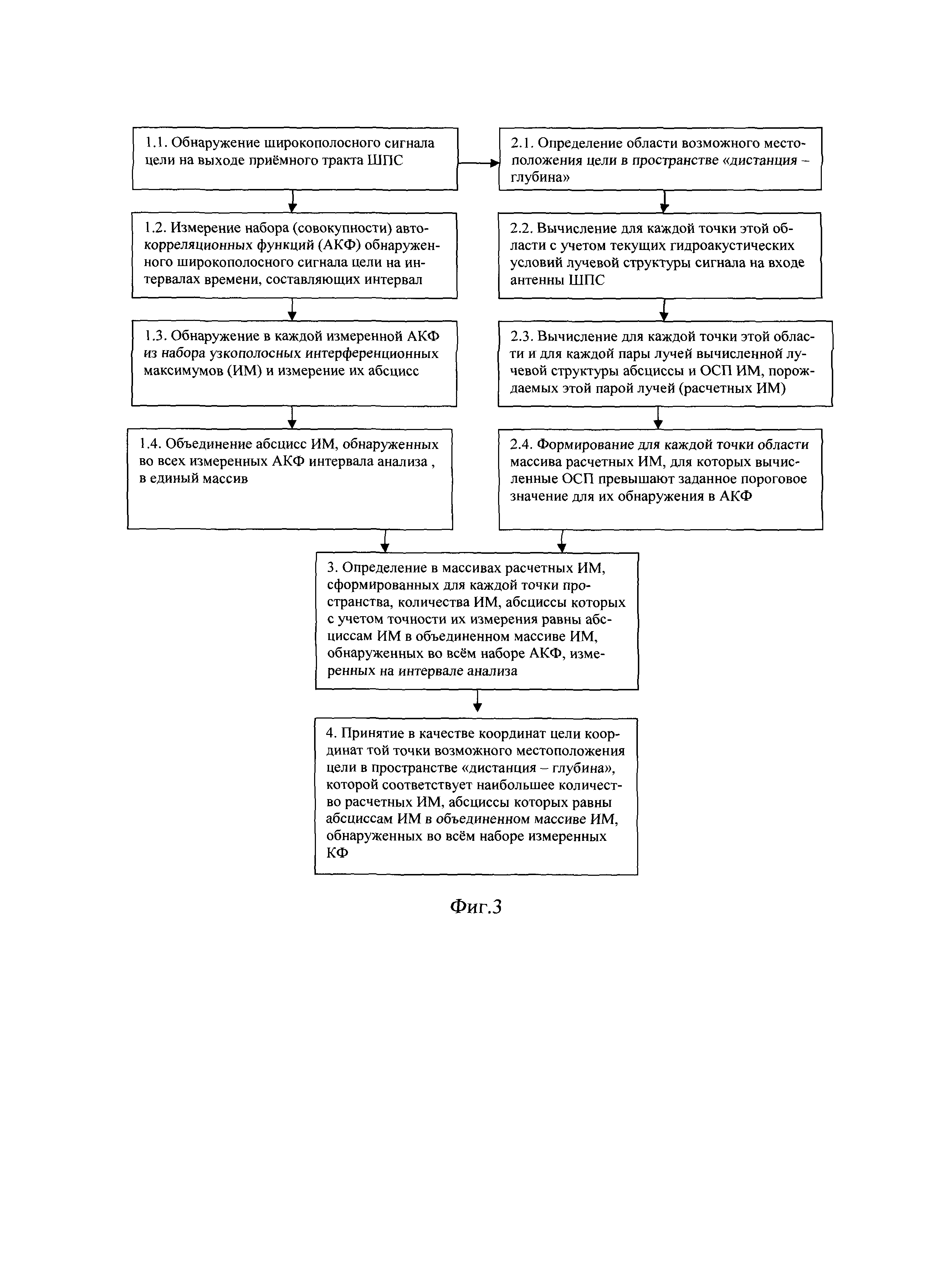
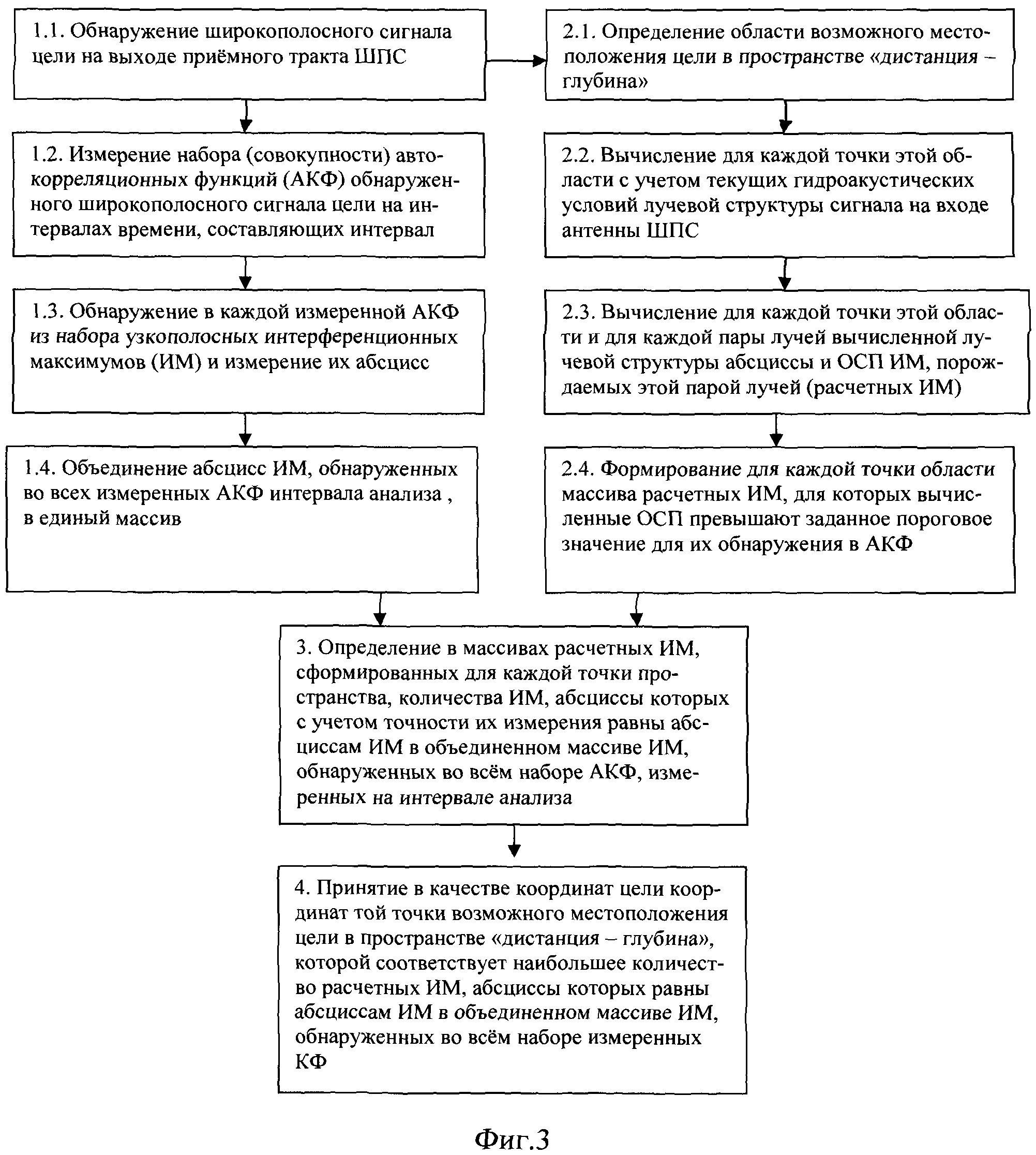
Как было отмечено выше, точность определения координат рассматриваемым способом тем выше, чем большее количество ИМ обнаружено в измеренной АКФ. Однако, на практике в каждой отдельной измеренной АКФ, как правило, обнаруживается малое число ИМ и их набор на последовательных интервалах измерения АКФ, как правило, не повторяется, что приводит к снижению точности оценки координат на каждом отдельном измерении. Для повышения точности определения координат предлагается увеличить количество измеренных ИМ, путем объединения в единый массив всех ИМ, обнаруженных не в каждой измеренной АКФ в отдельности, а в совокупности АКФ, измеренных на временном интервале (далее - интервале анализа), длительность которого выбирается равной интервалу времени, на котором координаты цели можно считать постоянными (единицы минут), и далее - искать соответствие расчетных ИМ со всем массивом ИМ, обнаруженных в АКФ, измеренных на интервале анализа. На фиг. 3 приведена блок - схема обработки сигналов в соответствии с предлагаемым способом. Согласно фиг. 3, обработка ведется на первоначальном этапе двумя параллельными ветвями.
Первая ветвь включает в себя последовательно выполняемые операции обнаружения широкополосного сигнала цели на выходе приемного тракта ШПС (блок 1.1); измерения набора автокорреляционных функций (АКФ) обнаруженного широкополосного сигнала цели на интервалах времени, составляющих интервал анализа (блок 1.2); обнаружения в каждой измеренной АКФ из набора узкополосных интерференционных максимумов (ИМ) и измерения их абсцисс (блок 1.3); объединения абсцисс ИМ, обнаруженных во всех измеренных АКФ интервала анализа, в единый массив (блок 1.4). Выполнение перечисленных операций обеспечивает формирование массива всех ИМ, измеренных на интервале анализа и готовых к сопоставлению с расчетными данными, формируемыми блоками второй ветви.
Вторая ветвь включает в себя операции определения области возможного местоположения цели в пространстве «дистанция - глубина» (блок 2.1); вычисления для каждой точки этой области с учетом текущих гидроакустических условий лучевой структуры сигнала на входе антенны ШПС, (блок 2.2); вычисления для каждой точки этой области и для каждой пары лучей вычисленной лучевой структуры значений абсциссы и ОСП ИМ, порождаемых этой парой лучей (расчетных ИМ) (блок 2.3) и операцию формирования для каждой точки области массива расчетных ИМ, для которых вычисленные ОСП превышают заданное пороговое значение для их обнаружения в АКФ (блок 2.4). Операции второй ветви могут быть выполнены однократно для текущего состояния гидрологических условий, определяющего лучевую структуру сигналов. Выполнение операций второй ветви обеспечивает формирование массива расчетных данных, готовых к сопоставлению с результатами измерений, сформированными первой ветвью.
Сопоставление выполняется последовательно расположенными блоками 3 и 4, выполняющими операции определения в массивах расчетных ИМ, сформированных для каждой точки пространства, количества ИМ, абсциссы которых с учетом точности их измерения равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всем наборе АКФ, измеренных на интервале анализа (блок 3) и, наконец, операцию определения координат цели путем выбора координат той точки возможного местоположения цели в пространстве «дистанция - глубина», которой соответствует наибольшее количество расчетных ИМ, абсциссы которых равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всем наборе измеренных КФ (блок 4).
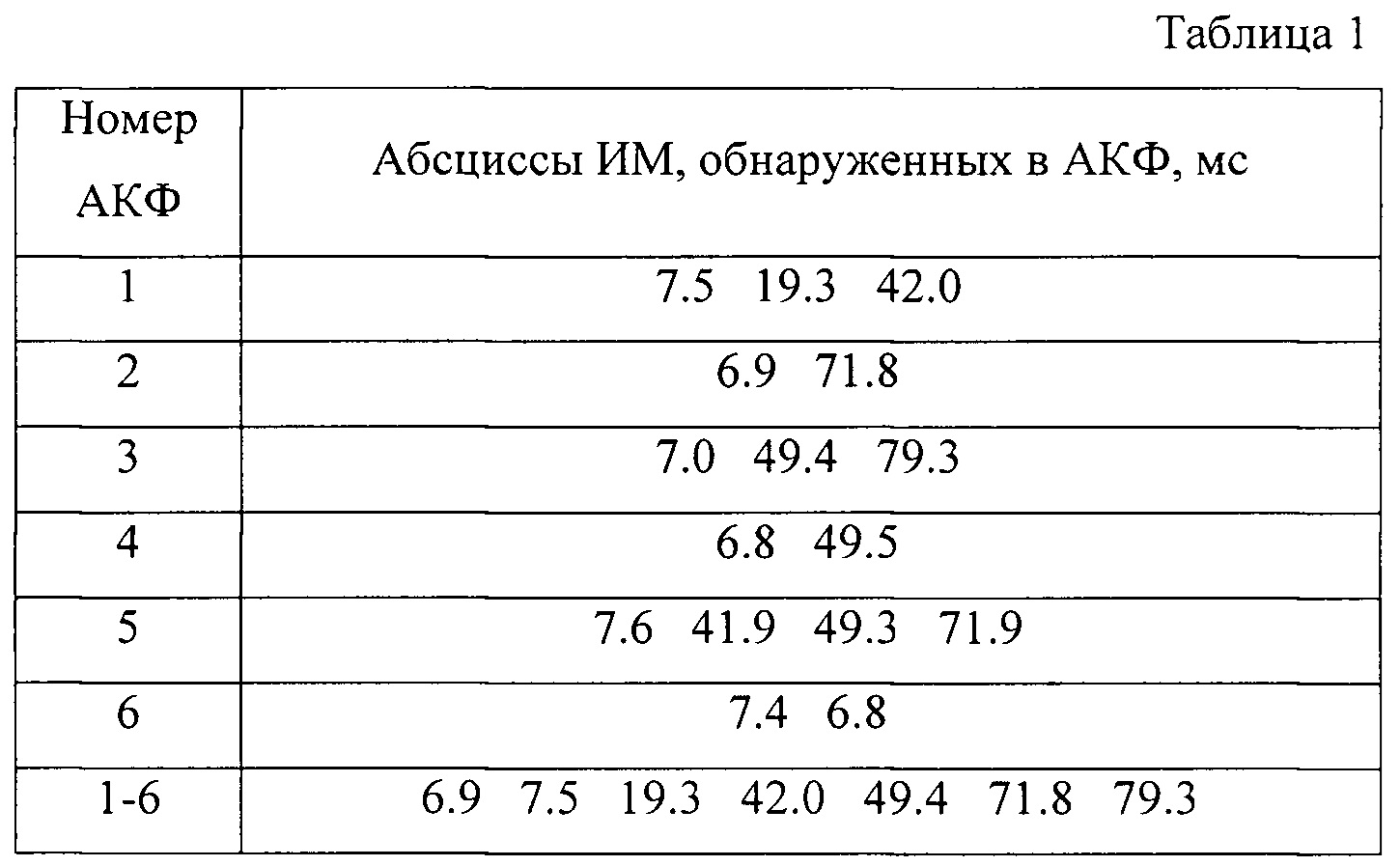
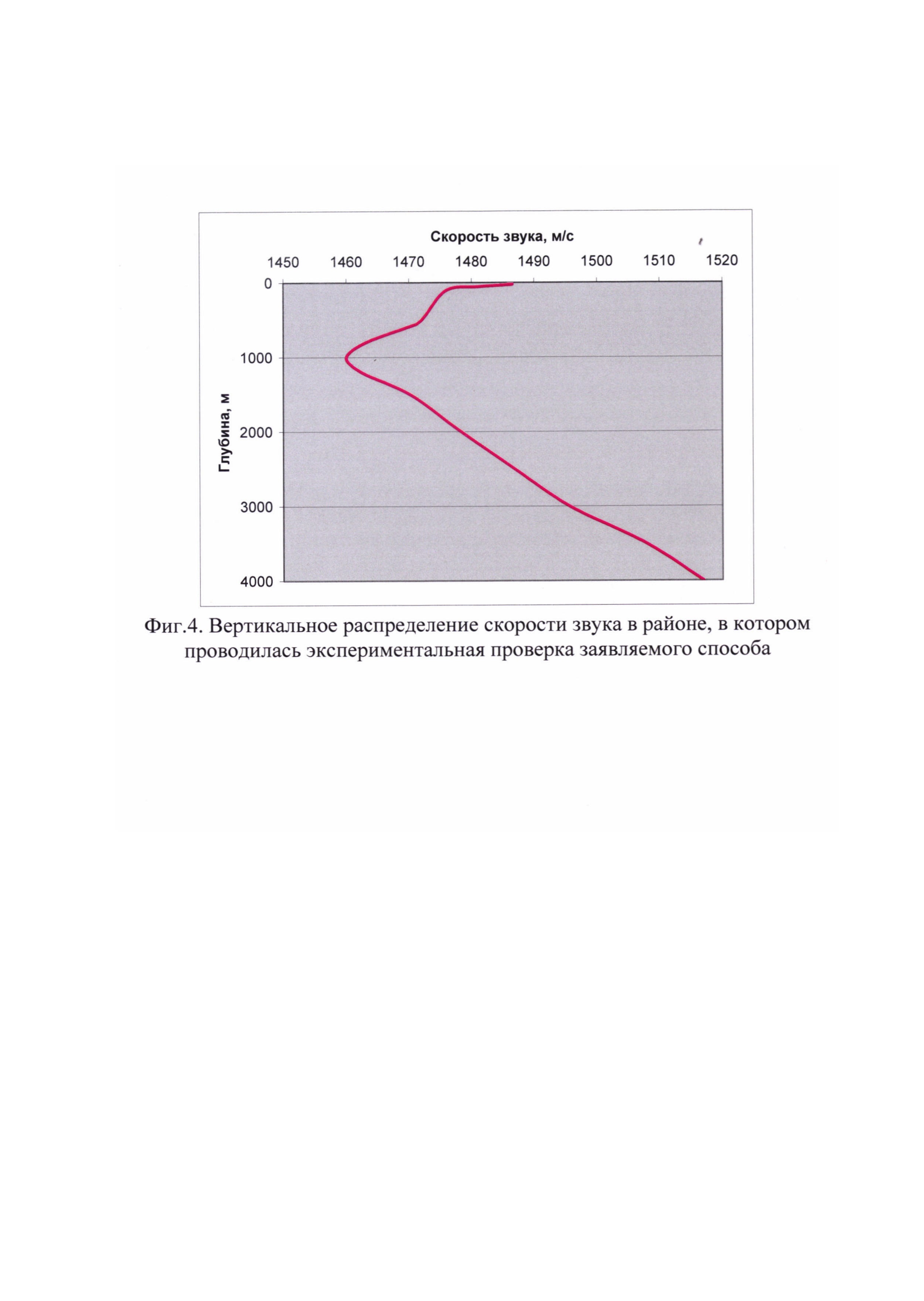
Эффективность данного технического решения подтверждена экспериментально. В качестве примера в табл. 1 приведены значения абсцисс ИМ, обнаруженных в АКФ, последовательно измеренных на интервале в 1 минуту в условиях зональной структуры гидроакустического поля (фиг. 4). Источник широкополосного шума находился в первой дальней зоне акустической освещенности на дистанции от приемной антенны ШПС 52 км на глубине 198 м. Приемная плоская квадратная антенна 3×3 м располагалась на глубине 48 м. Прием осуществлялся в полосе частот 1-3 кГц. ОСП на выходе сформированного пространственного канала превышало 20 дБ. АКФ шума источника (цели) измерялась на интервале в 1 сек с периодичностью 10 сек. Поиск координат цели осуществлялся: по глубине - в диапазоне 5-300 м; по дистанции - в интервале ±30% от истинной дистанции
Из рассмотрения табл. 1 следует, что наборы ИМ в АКФ, измеренных на последовательных интервалах времени, различаются. В последней строке табл. 1 приведены ИМ, обнаруженные хотя бы в одной из АКФ. Поскольку точность измерения абсциссы ИМ составляет 1/3 кГц = 0,33 мс, то из всех ИМ, абсциссы которых отличались менее, чем на 0,33 мс, выбирался только один ИМ.
В табл. 2 приведены результаты определения координат цели способом-прототипом с использованием ИМ каждой отдельной АКФ и с использованием предусмотренных заявляемым способом объединенных ИМ всех шести АКФ.
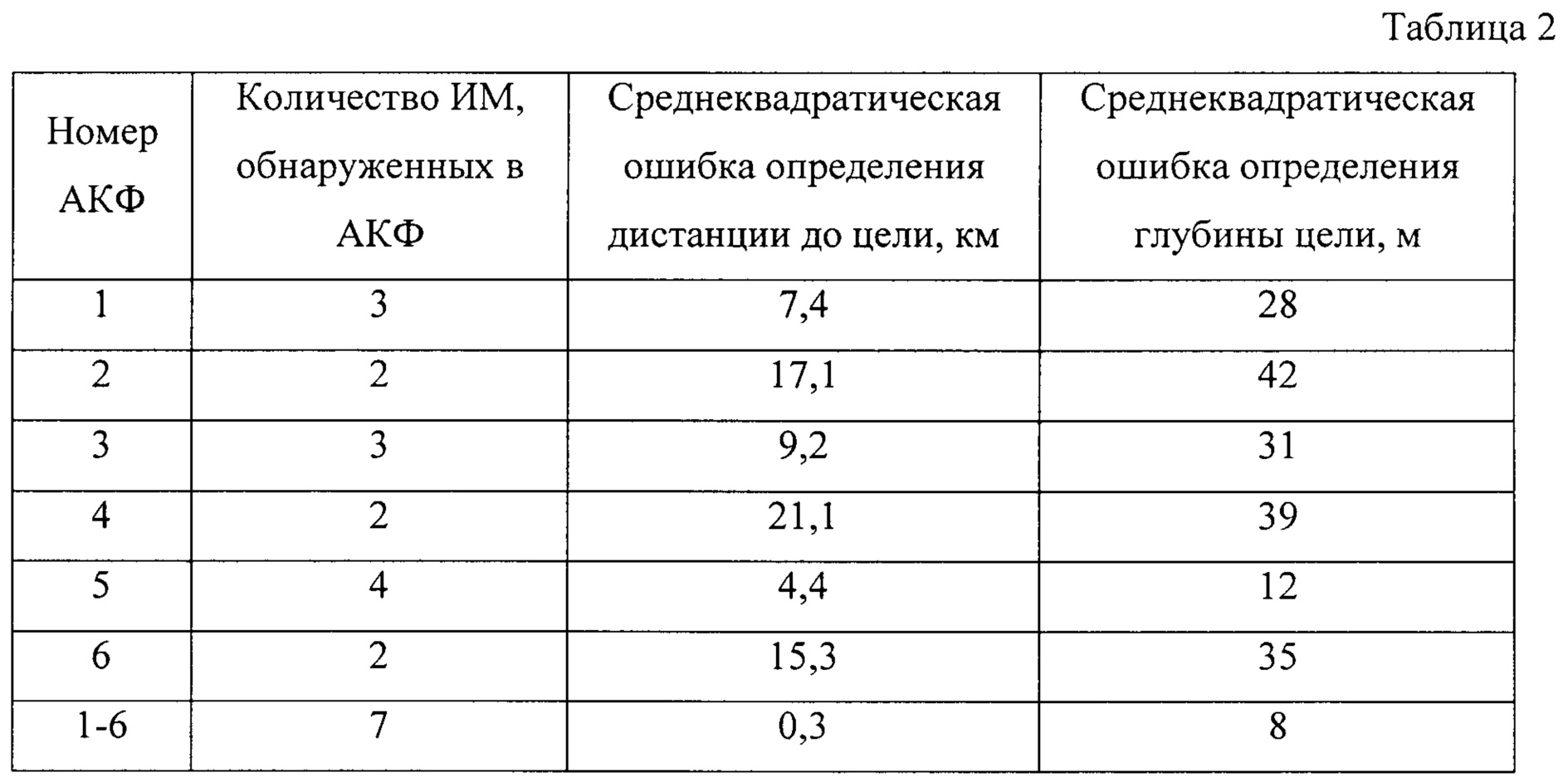
Следует заметить, что результат определения координат цели с использованием ИМ одной отдельно взятой АКФ во всех шести случаях был многозначным. В случае же использования всей совокупности ИМ, обнаруженных во всех шести АКФ, результат оказался однозначным, что определило высокую точность определения координат цели.
Результаты, приведенные в табл. 2, подтверждают тот факт, что с увеличением количества ИМ, обнаруженных в измеренной АКФ, точность определения координат цели повышается.
Аналогичные по сущности результаты получены и для других условий, в которых проводились эксперименты.
Таким образом, заявленный технический результат - повышение точности определения координат шумящей цели на основе информации, содержащейся в АКФ ее сигнала, - можно считать достигнутым.
Источники информации:
1. Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели. - Морская радиоэлектроника, 2012, №2 (40), с. 30-34.
2. Hassab I. С.Contact Localization and Motion Analysis in the Ocean Environment: a Perspective. - IEEE Journal of Oceanic Engineering, 1983, vol. OE-8, №3, pp. 136-147.
3. Quazi A.H., Lerro D.T. Passive localization using time-delay estimates with sensor positional errors. - JASA, 1985, vol. 78, №5. pp.1664-1670.
4. Worthmann B.M., Song H.C., Dowling D.R. High frequency source localization in a shallow ocean sound channel using frequency difference matched field processing. -Journal Acoust. Soc. Am., 2015, vol. 138, p. 3549.
5. Орлов Е.Ф., Фокин B.H., Шаронов Г.А. Исследование параметров интерференционной модуляции широкополосного звука в глубоком океане. - Акустический журнал, 1988, том 34, вып. 5, с. 902-907.
6. Лазарев В.А., Орлов Е.Ф., Фокин В.Н., Шаронов Г.А. Частотная зависимость параметров интерференционной модуляции широкополосного звука в мелком море. - Акустический журнал, 1989, том 35, вып. 4, с. 685-688.
7. Машошин А.И. Помехоустойчивость выделения максимумов в корреляционной функции широкополосного шумового сигнала морского объекта, обусловленных многолучевым распространением сигнала в водной среде. - Акустический журнал, 2001, том 47, №6, с. 823-829.
8. Машошин А.И. Исследование условий применимости корреляционной функции широкополосного многолучевого сигнала для оценки координат источника. -Акустический журнал, 2017, том 63, №3, с. 307-313.
9. Хилько А.И., Смирнов И.П., Машошин А.И., Шафранюк А.В. Исследование когерентности акустических полей высокочастотных шумовых источников в случайно неоднородной среде. - Акустический журнал, 2018, том 64, №2, с. 217-227.
10. Кузьмин С.З. Цифровая обработка радиолокационной информации. - М.: Сов. радио, 1974.
11. Кендал М., Стьюарт А. Статистические выводы и связи. - М.: Наука, 1973.
12. Вентцель Е.С., Овчаров Л.А. Теория вероятностей и ее инженерные приложения. М.: Наука, 1988.
Способ определения координат морской шумящей цели, включающий обнаружение на выходе шумопеленгатора широкополосного сигнала цели, измерение его автокорреляционной функции (АКФ), обнаружение в ней узкополосных интерференционных максимумов (ИМ), измерение их абсцисс, перебор точек возможного местоположения цели в пространстве «дистанция - глубина», вычисление для каждой точки с учетом текущих гидроакустических условий лучевой структуры сигнала на входе гидроакустической антенны шумопеленгатора, вычисление для каждой возможной пары лучей вычисленной лучевой структуры абсциссы и отношения сигнал/помеха ИМ (далее - расчетный ИМ), который должен быть порожден в АКФ этой парой лучей, формирование для всех пар лучей массива расчетных ИМ, вычисленные отношения сигнал/помеха которых превышают заданное пороговое значение для их обнаружения в АКФ, определение в сформированном массиве количества ИМ, абсциссы которых с учетом точности их измерения равны абсциссам ИМ, обнаруженных в измеренной АКФ, принятие в качестве координат цели координаты той точки в пространстве «дистанция - глубина» возможного местоположения цели, которой соответствует наибольшее количество ИМ, абсциссы которых равны абсциссам ИМ, обнаруженных в измеренной АКФ сигнала на выходе антенны, отличающийся тем, что измерение АКФ обнаруженного шумового сигнала и обнаружение в ней ИМ осуществляют на каждом из ряда последовательных интервалов времени, затем все ИМ, обнаруженные в АКФ на ряде последовательных интервалов времени, объединяют в единый массив и принимают в качестве координат цели координаты той точки возможного местоположения цели в пространстве «дистанция - глубина», которой соответствует наибольшее количество расчетных ИМ, абсциссы которых с учетом точности их измерения равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всем наборе измеренных КФ.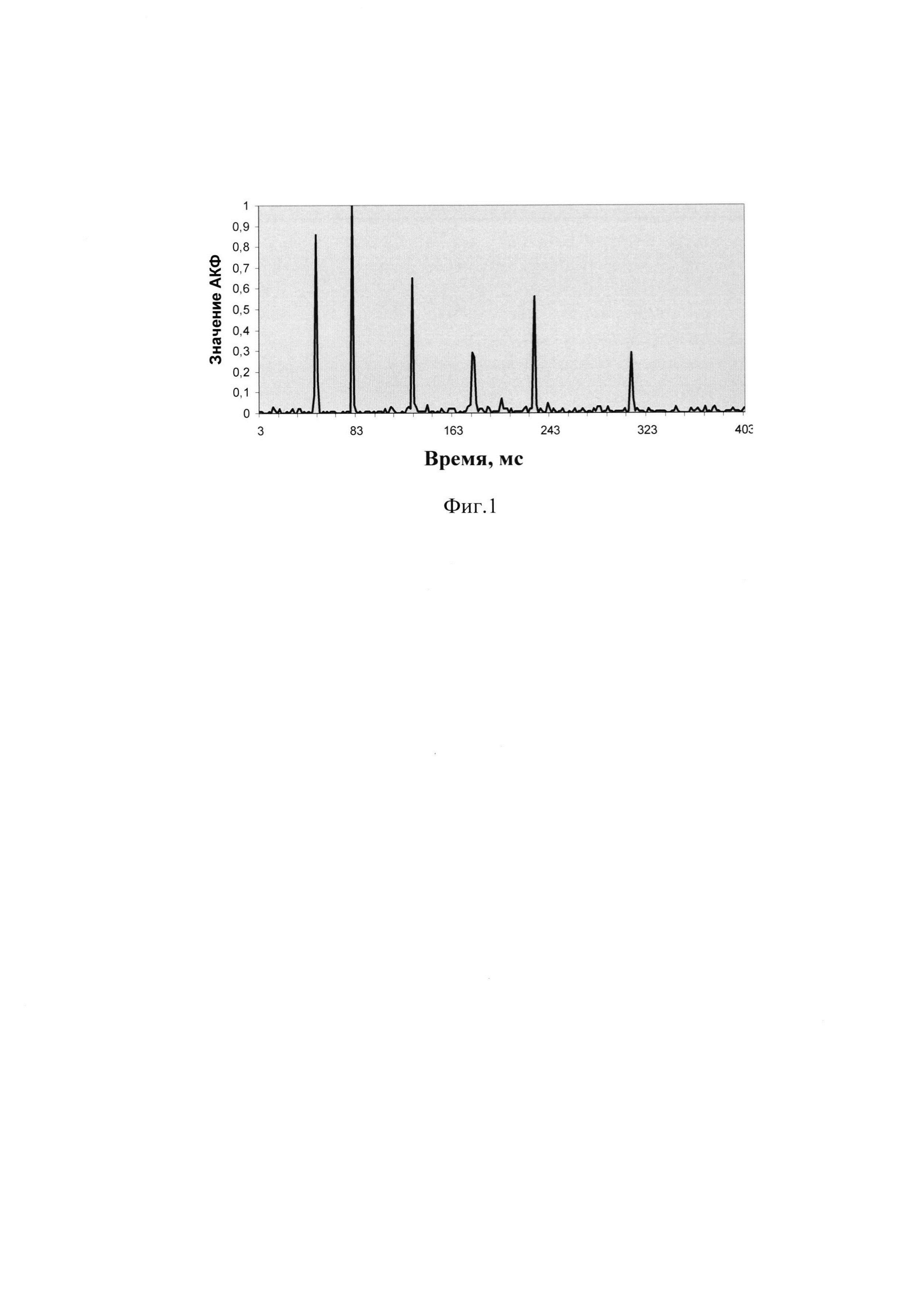
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Стенд для выработки угловых колебаний в двух плоскостях
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Микромеханический вибрационный гироскоп
Способ определения погрешностей двухстепенного поплавкового гироскопа с газодинамическим подвесом ротора гиромотора
Способ бесплатформенной инерциальной навигации на микромеханических чувствительных элементах
Способ изготовления ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп
Способ обработки информации в гидроакустической антенне
Способ оценки полного профиля вертикального распределения скорости звука
Способ получения упругого и звукопоглощающего полимерного материала с термопластичными микросферами
Бескорпусная гидроакустическая антенна
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Способ обработки сигнала шумоизлучения объекта
Гидроакустическая приемная многоэлементная антенна выпуклой формы двойной кривизны, размещаемая в носовой оконечности носителя
Способ определения координат (пеленга и дистанции) и параметров движения (курса и скорости) морской шумящей цели
Устройство получения информации о шумящем в море объекте
Устройство получения информации о шумящем в море объекте

