Результат интеллектуальной деятельности: Способ обработки гидролокационной информации
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано при проектировании и разработке систем активной гидролокации.
Для повышения эффективности обнаружении объектов гидролокационными способами и измерения их параметров необходимо обеспечить автоматическую классификацию объектов на фоне реверберационной помехи.
Известна «Система активной гидролокации» по патенту РФ №2393503, реализация которой содержит следующую последовательность операций: излучение зондирующего сигнала, прием эхо-сигнала, формирование характеристик направленности, измерение дистанции, измерение радиальной скорости, прием сигнала шумоизлучения, измерение пеленга по сигналу шумоизлучения, измерение величины изменения пеленга, определение полной скорости движения обнаруженной цели.
Недостатком этой системы является то, что не производится автоматическое измерение параметров и классификация обнаруженных целей.
Известна навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО) по патенту РФ №2225991 от 24.12.2001 г. Станция реализует следующую последовательность операций: излучение сигнала, прием эхо-сигнала, предварительную обработку, измерение параметров эхо-сигнала, определение классификационных признаков, измерение скорости звука, прослушивание сигнала шумоизлучения, классификацию целей по измеренным классификационным признакам. Недостатком этого технического решения является то, что измерение параметров и принятие решения производится оператором и это может приводить к ошибкам, связанным с его квалификацией и психологическими особенностями.
Известен способ обработки гидролокационной информации по патенту РФ №2529441, содержащий излучение сигнала, прием отраженного эхо-сигнала, формирование веера статических характеристик направленности, цифровую многоканальную обработку, определение порога, пороговое обнаружение эхо-сигнала, определение эхо-сигналов превысивших порог по всей шкале дистанции, формирование строба по каждому обнаружению, определение классификационных признаков по каждому обнаружению и формирование банка классификации по каждой обнаруженной цели с определением дистанции, пеленга и классификационных признаков.
Этот способ по количеству общих признаков является наиболее близким к предлагаемому изобретению.
Недостатком способа прототипа является необходимость использования для обнаружения эхо-сигнала порогового обнаружителя, работа которого зависит от уровня входной помехи, которая определяется уровнем реверберации после излучения, а так же уровнем донной реверберации при приеме эхо-сигнала в направлении дна, когда имеет место большое число отражений от дна. Кроме того, обнаружение и классификация производится оператором по нескольким циклам излучение – прием.
Задачей изобретения является автоматическое обнаружение гидролокатором эхо-сигналов от объектов искусственного происхождения и измерение их классификационных признаков в условиях наличия донной и поверхностной реверберации по одному зондирующему сигналу.
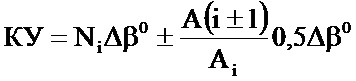
Решение задачи обеспечивается тем, что в способ обработки гидролокационной информации, содержащий излучение сигнала, прием отраженного эхо-сигнала, формирование веера статических характеристик направленности, с образованием пространственных каналов шириной Δβ0, цифровую многоканальную обработку, формирование банка классификации, отображение информации и управление, введены новые признаки, а именно: формируют массив последовательных временных реализаций за все время излучения - приема по всем пространственным каналам, определяют коэффициенты корреляции (КК) между последовательными временными реализациями соседних пространственных каналов, определяют соседние пространственные каналы с коэффициентом корреляции КК>0,5, измеряют амплитуды эхо-сигналов в соседних пространственных каналах с коэффициентом корреляции КК>0,5, определяют курсовой угол (КУ) объекта по соотношению амплитуд эхо-сигналов в соседних пространственных каналах по формуле  , где Ni - номер пространственного канала с максимальной амплитудой, Ai, Ai+1, Аi-1 - максимальные амплитуды в соседних пространственных каналах с КК>0,5, определяют угловую протяженность (УП) объекта по числу пространственных соседних каналов с КК>0,5, суммируют амплитуды временных отсчетов соседних пространственных каналов с КК>0,5, нормируют амплитуды полученной суммарной временной реализации на число соседних пространственных каналов с КК>0,5, определяют максимальную амплитуду Амакс суммарной нормированной временной реализации, определяют временную протяженность (ВП) реализации как ВП=Тn-Т1, где Тn - последний временной отсчет с амплитудой 0,3 Амакс, T1 - первый временной отсчет с амплитудой 0,3 Амакс суммарной реализации, определяют ТАмакс временного положения Амакс относительно времени излучения, определяют дистанцию Д=0,5 Сзв ТАмакс, где Сзв - скорость звука, оценку дистанции Д, временную протяженность ВП, угловую протяженность УП, коэффициент корреляции КК, величину Амакс запоминают и передают в банк классификации обнаруженных целей для отображения и принятия решения.
, где Ni - номер пространственного канала с максимальной амплитудой, Ai, Ai+1, Аi-1 - максимальные амплитуды в соседних пространственных каналах с КК>0,5, определяют угловую протяженность (УП) объекта по числу пространственных соседних каналов с КК>0,5, суммируют амплитуды временных отсчетов соседних пространственных каналов с КК>0,5, нормируют амплитуды полученной суммарной временной реализации на число соседних пространственных каналов с КК>0,5, определяют максимальную амплитуду Амакс суммарной нормированной временной реализации, определяют временную протяженность (ВП) реализации как ВП=Тn-Т1, где Тn - последний временной отсчет с амплитудой 0,3 Амакс, T1 - первый временной отсчет с амплитудой 0,3 Амакс суммарной реализации, определяют ТАмакс временного положения Амакс относительно времени излучения, определяют дистанцию Д=0,5 Сзв ТАмакс, где Сзв - скорость звука, оценку дистанции Д, временную протяженность ВП, угловую протяженность УП, коэффициент корреляции КК, величину Амакс запоминают и передают в банк классификации обнаруженных целей для отображения и принятия решения.
Техническим результатом от использования предлагаемого изобретения является обеспечение автоматического обнаружения и повышение достоверности обнаружения объектов и измерения классификационных параметров на фоне отражений от дна и на фоне реверберационной помехи по одному циклу излучение - прием.
Поясним физическую сущность изобретения. Объекты, которые могут быть обнаружены гидролокатором, имеют различные физические характеристики. Объекты могут находиться на поверхности, или могут быть погружены на различную глубину, или просто располагаться на дне. Эхо-сигналы от этих объектов будут различаться по своим энергетическим характеристикам. Для определения этих характеристик используется многоканальный прием эхо-сигнала статическим веером характеристик направленности, что обеспечивает пространственную селекцию обнаруженных объектов по всем пространственным каналам. Эхо-сигнал от объекта как сумма и конфигурация отсчетов может находиться в одном или нескольких пространственных каналах, поскольку они перекрываются, что определяет угловую протяженность объекта.
При этом, как правило, локальные отражатели принадлежат к классу отражателей искусственного происхождения и в зависимости от принадлежности могут иметь форму шара, эллипсоида, куба, цилиндра, конуса, плоскости или их различных сочетаний. Это приводит к тому, что при отражении формируется регулярный фронт волны, характеристика которой стабильна на некотором пространственном интервале, что отличает этот фронт волны от отражений местных предметов (Е.А. Штагер, Е.В. Чаевский. Рассеяние волн на телах сложной формы. М., Сов. Радио, 1974 г.). Поскольку локальный отражатель находится в дальнем поле и имеет ограниченные размеры, то эхо-сигнал от такого отражателя представляет плоскую малоискаженную волну и будет приниматься несколькими характеристиками направленности одновременно и, соответственно, энергетические характеристики эхо-сигнала будут по физическим свойствам достаточно близкими в нескольких соседних пространственных каналах. Поэтому, если использовать узкие характеристики направленности, то эхо-сигналы, принимаемые ими, будут похожими и коэффициент корреляции между временными реализациями будет достаточно высоким. Отражение от поверхности, образующее реверберационную помеху, не имеет таких свойств. В случае донной реверберации (см. Ольшевский В.В. Статистические свойства морской реверберации. М, Наука, 1966 г.) эхо-сигнал формируется как сумма эхо-сигналов от элементарных отражателей, имеющих различную длительность и различную амплитуду, что приводит к искажению фронта плоской волны. В этой ситуации в соседних характеристиках направленности будут приниматься эхо-сигналы реверберации, которые не связаны между собой или имеют малую степень связи. Единственным способом, который позволит отличить наличие когерентного локального отражателя, является корреляционная обработка временных реализаций, принимаемых одновременно в соседних пространственных каналах. Таким образом, для реализации предлагаемого метода обработки необходим прием эхо-сигнала веером статических характеристик направленности, выбор временных реализаций в соседних пространственных каналах, определение степени корреляционной связи между каналами и определение числа каналов, в которых эта связь существует. Число каналов, между которыми определится высокий коэффициент корреляции, и будет характеризовать угловую протяженность объекта УП. Если произвести суммирование временных отсчетов тех характеристик направленности, между временными реализациями которых коэффициент корреляции превышает 0,5, то можно получить более достоверную суммарную временную протяженность объекта ВП, которая отличается от временной радиальной протяженности, измеренной в одной характеристике направленности. Наличие коэффициента корреляции больше 0,5 является критерием обнаружения локального объекта искусственного происхождения, что исключает целый класс отражений от дна и превышение порога уровнем реверберации, а использования корреляционных связей между пространственными каналами позволяет выделять более достоверно классификационные признаки по одному циклу излучение- прием. Для определения дистанции используется временное положение максимальной амплитуды суммарного эхо-сигнала, которая характеризует отражательную способность объекта. По измеренным классификационным признакам Д, УП, ВП, КК, Амакс в банке классификации производится классификация обнаруженного объекта по одной посылке. С использованием вычислительных средств эти операции могут производиться последовательно по всем объектам, расположенным в акватории. По всем обнаруженным объектам формируют общий банк классификации, который может пополняться новыми классификационными признаками, полученными при последующем излучении зондирующих сигналов. Эти измеренные признаки могут сохраняться для анализа результатов и дальнейшей обработки в стационарных условиях.
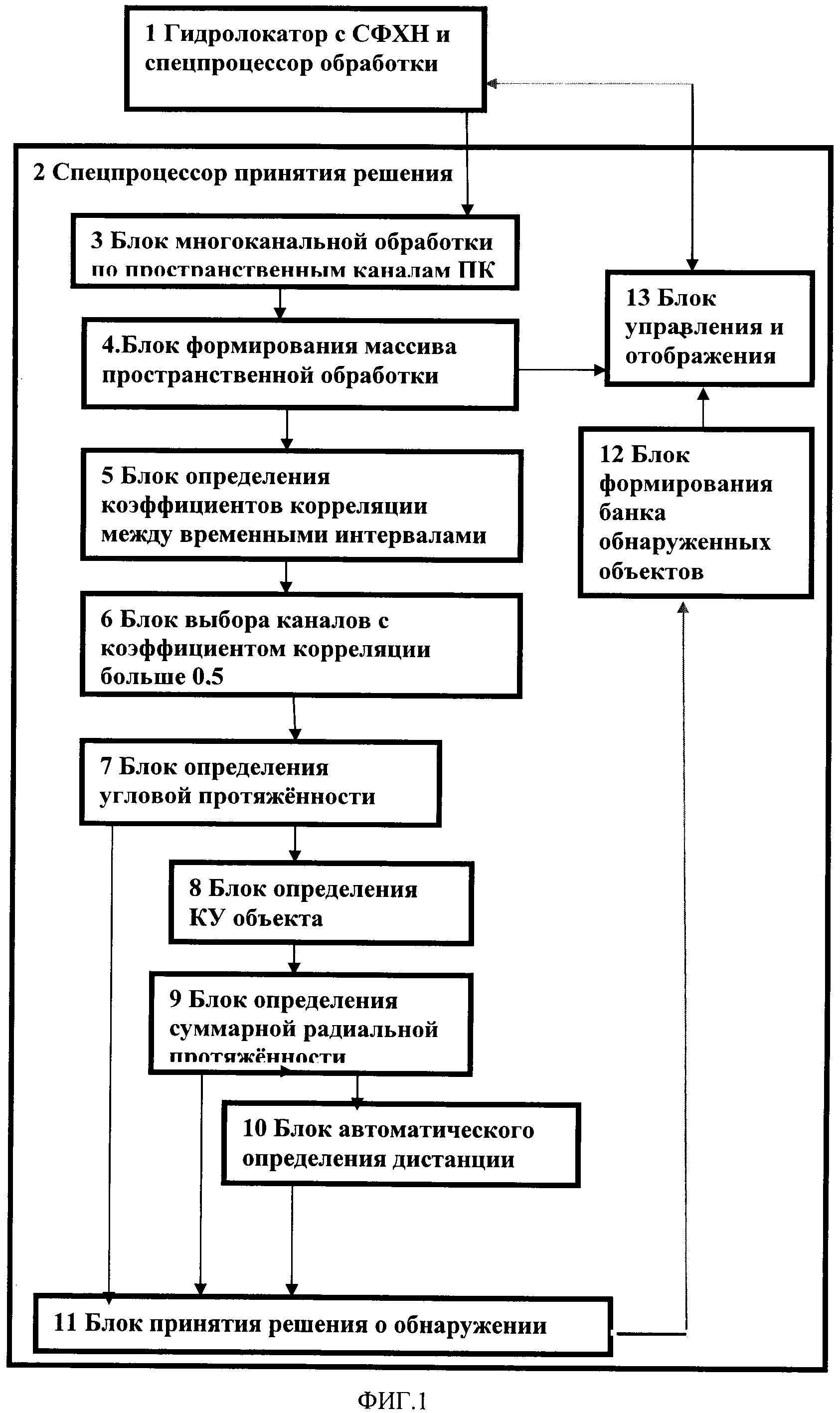
Сущность изобретения поясняется Фиг. 1, на которой представлена блок-схема системы, которая реализует предлагаемый способ.
Система (фиг. 1) содержит гидролокатор 1 с антенной, коммутатором приема - передачи, генератором, с системой формирования характеристик направленности СФХН и спецпроцессором обработки (не указаны) последовательно соединен со спецпроцессором 2 принятия решения. В состав спецпроцессора 2 входят последовательно соединенные блок 3 многоканальной обработки по пространственным каналам (ПК), блок 4, блок формирования массива пространственной обработки, блок 5 определения коэффициентов корреляции между временными интервалами ПК, блок 6 выбора каналов с коэффициентом корреляции больше 0,5, блок 7 определения угловой протяженности объекта по КК, блок 8 определения курсового угла объекта по КК, блок 9 определения суммарной радиальной протяженности по КК, блок 10 автоматического определения дистанции, блок 11 блок принятия решения о обнаружении объекта, блок 12 формирования банка обнаруженных объектов, блок 13 управления и индикатор, выход которого соединен двусторонней связью со входом блока 1. Второй выход блока 4 соединен со вторым входом блока 13. Второй выход блока 7 соединен со вторым входом блока 11. Второй выход блока 9 суммарной радиальной протяженности соединен с третьим входом блока 11.
Реализацию предлагаемого способа целесообразно продемонстрировать на примере работы системы (фиг. 1).
С блока 13 управления поступает сигнал в гидролокатор 1, который работает в своем штатном режиме. В составе любого гидролокатора входят приемно-излучающая антенна, коммутатор приема передачи, генератор, система формирования характеристики направленности и система предварительной обработки, результаты которой отображаются в блоке управления и отображения, который также осуществляет управление работы гидролокатора. Гидролокатор является известным устройством, который используется в прототипе, где имеется спецпроцессор обработки, который формирует зондирующий сигнал, излучает его в водную среду, принимает эхо-сигнал, производит фильтрацию принятого сигнала, формирует характеристики направленности в приеме, с требуемой шириной характеристики направленности. Спецпроцессор 2 принятия решения осуществляет пространственную и временную обработку поступившей информации с целью автоматического обнаружение эхо-сигнала в пространственных каналах и измерения основных классификационных признаков эхо-сигнала. В блоке 3 осуществляется последовательное формирование принятых цифровых массивов и подготовки их для последующей обработки по всем пространственным каналам статического веера характеристик направленности. Из блока 4 поступившая временная и последовательная пространственная информация без предварительной обработки передается в блок 13 на систему отображения для предоставления оператору. В этом же блоке 4 формируются временные массивы для последовательного определения коэффициентов корреляции по последовательным пространственным каналам. В блоке 5 осуществляется выбор последовательных временных интервалов соседних пространственных каналов из всего массива и определение коэффициента корреляции между ними. Определение коэффициента корреляции является известной операцией, которая осуществляется во всех современных цифровых устройствах с использованием стандартных процедур. Практически все указанные процедуры могут быть реализованы на спецпроцессорах и современных компьютерах, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов. СПб, «БХВ - Петербург», 2011 г.). Полученные значения коэффициентов корреляции поступают в блок 6, где осуществляются выбор временных интервалов, коэффициент корреляции между которыми превысил порог 0,5 в соседних пространственных каналах. В блоке 7 определяется угловая протяженность объекта по числу пространственных каналов, между которыми коэффициент корреляции превысил значение 0,5. Если имеются один коэффициент корреляции, то это означает, что число пространственных каналов 2 и объекта наблюдается в 2-х пространственных каналах и его угловая протяженность 6° при ширине одной характеристики направленности 2°. Если имеется два коэффициента корреляции, то число пространственных каналов 3 и угловая протяженность объекта 9°. Признак УП угловой протяженности передается в блок 11. Массив временных интервалов соседних пространственных каналов из блока 7 передается в блок 8, где измеряются амплитуды эхо-сигналов в пространственных каналах и по их соотношению определяется курсовой угол объекта КУ по положению пространственных каналов. По выделенным массивам блока 8 определения курсового угла КУ производится суммирование временных отсчетов соседних пространственных каналов в блоке 9, где определяется суммарная временная радиальная протяженность объекта ВП. Для формирования единого масштаба измерения здесь же производится и нормирование суммарных амплитуд к числу суммируемых пространственных каналов. В этом же блоке определяется максимальное значение амплитуды Амакс и временное положение максимальной амплитуды. В блоке 10 определяется время распространения сигнала от момента излучения и до момента приема эхо-сигнала и дистанция до объекта Д. Из блока 9 оценка суммарной временной радиальной протяженности передается в блок 11. Принятое в блоке 11 автоматическое решение передается в блок 12 формирование банка классификации для заполнения данных по обнаруженному объекту и далее в блок 13 для отображения. В банке классификации могут быть собраны данные по нескольким обнаруженным объектам, они могут формироваться по времени в любом промежутке от момента излучения до конца шкалы дистанции, которая задается в блоке управления и отображения.
В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также корреляционную обработку и процедуры анализа временных реализаций. Вопросы разработки и применения спецпроцессоров достаточно подробно рассмотрены в литературе по цифровой обработке. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника». Санкт-Петербург, «Наука», 2004 г., стр. 281).
Таким образом, предлагаемый способ обработки гидролокационной информации позволит по одному циклу излучения - приема автоматически обнаруживать объекты, измерять дистанцию, суммарную радиальную протяженность, угловую протяженность и амплитуду максимального отражателя, что позволит формировать банк классификации обнаруженных объектов, классифицировать объект и накапливать информацию по нескольким циклам излучения - приема для последующего решения задач классификации.
Способ обработки гидролокационной информации, содержащий излучение сигнала, прием отраженного эхо-сигнала, формирование веера статических характеристик направленности с образованием пространственных каналов шириной Δβ, цифровую многоканальную обработку, формирование банка классификации, отображение информации и управление, отличающийся тем, что формируют массив последовательных временных реализаций за все время излучения - приема по всем пространственным каналам, определяют коэффициенты корреляции (КК) между последовательными временными реализациями соседних пространственных каналов, определяют соседние пространственные каналы с коэффициентом корреляции КК>0,5, измеряют амплитуды эхо-сигналов в соседних пространственных каналах с коэффициентом корреляции КК>0,5, определяют курсовой угол (КУ) объекта по соотношению амплитуд эхо-сигналов в соседних пространственных каналах по формуле , где N - номер пространственного канала с максимальной амплитудой, A, A, A - максимальные амплитуды в соседних пространственных каналах с КК>0,5, определяют угловую протяженность (УП) объекта по числу пространственных соседних каналов с КК>0,5, суммируют амплитуды временных отсчетов соседних пространственных каналов с КК>0,5, нормируют амплитуды полученной суммарной временной реализации на число соседних пространственных каналов с КК>0,5, определяют максимальную амплитуду A суммарной нормированной временной реализации, определяют временную протяженность (ВП) реализации как ВП=T-T, где T - последний временной отсчет с амплитудой 0,3 A, T - первый временной отсчет с амплитудой 0,3 A суммарной реализации, определяют T временного положения A относительно времени излучения, определяют дистанцию Д=0,5 C T, где C - скорость звука, оценку дистанции Д, временную протяженность ВП, угловую протяженность УП, коэффициент корреляции КК, величину A запоминают и передают в банк классификации обнаруженных целей для отображения и принятия решения.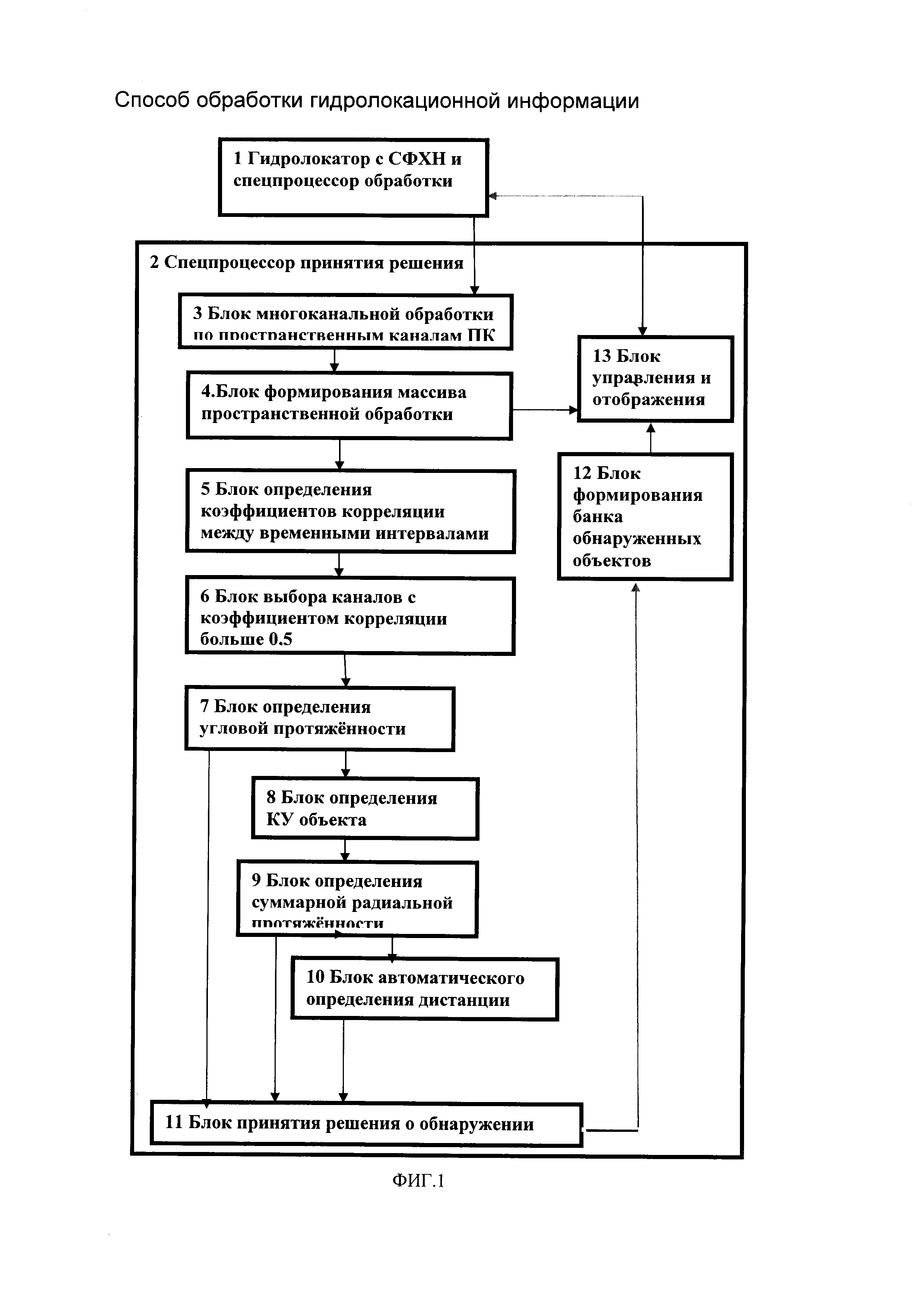
Способ обработки сигнала шумоизлучения объекта
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Способ цветового кодирования информации гидроакустического шумопеленгования
Гидроакустический способ измерения глубины погружения неподвижного объекта
Активный гидролокатор
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта

