Результат интеллектуальной деятельности: Система точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС
Вид РИД
Изобретение
Изобретение относится к области радиотехники и может быть использовано для навигации подвижных объектов в режиме реального времени.
Известна система мониторинга подвижных объектов (Рушкевич А., Осадчий В. Мониторинг подвижных объектов: российские реалии и технические инновации [Текст] / А. Рушкевич, В. Осадчий // Беспроводные технологии. - 2010. - №3. - С. 56-60 [1]), состоящая из телеметрического терминала, выполняющего следующие функции:
- определения координат подвижного объекта в автономном (абсолютном) методе при помощи спутникового ГЛОНАСС/GPS приемника,
- сбора информации от бортового оборудования и дополнительных датчиков,
- пересылки информации по каналам связи в диспетчерский сервер.
Кроме телеметрического терминала, в предложенную систему входит диспетчерский сервер, представляющий собой программное обеспечение, для обеспечения клиентов объективной информацией о местонахождении подвижного объекта в данный момент времени.
Данная система обладает следующим недостатками:
- в системе мониторинга подвижных объектов в качестве телеметрического терминала выступает одночастотный двухсистемный кодовый ГЛОНАСС/GPS модуль, принимающий только сигналы стандартной точности от спутников глобальных навигационных систем (ГЛОНАСС/GPS), поэтому погрешность определения местоположения подвижного объекта в данной системе составляет 5-10 м в системе координат WGS-84 (Антонович К.М. Использование спутниковых радионавигационных систем в геодезии [Текст] / К.М. Антонович // ГОУ ВПО «Сибирская государственная геодезическая академия». - М: ФГУП «Картгеоцентр», 2006. - 360 с. [2]),
- в системе мониторинга подвижных объектов не вводится корректирующая информация, получаемая от базовой станции, имеющей точные координаты в системе координат WGS-84, в местоположение подвижного объекта,
- в системе мониторинга подвижных объектов отсутствует блок обработки совместной информации, поступающей с базовой станции и подвижного объекта.
Известна также система определения местоположения подвижных объектов в режиме реального времени (патент RU №2444705, 10.03.2012 [3]).
Система определения местоположения подвижных объектов в режиме реального времени, состоящая из спутников глобальных навигационных систем, диспетчерской станции, содержащей геоинформационную систему, базовой станции, подвижных объектов, оснащенных телеметрическими терминалами, на которых установлено телекоммуникационное оборудование, обеспечивающее соединение базовой станции с подвижными объектами посредством широкополосного радиодоступа, блок обработки совместной информации, поступающей с базовой станции и подвижного объекта.
Недостатками данного технического решения являются:
- в системе мониторинга подвижных объектов в качестве телеметрического терминала выступает одночастотный двухсистемный кодовый ГЛОНАСС/GPS модуль, принимающий только сигналы стандартной точности от спутников глобальных навигационных систем (ГЛОНАСС/GPS), поэтому погрешность определения местоположения подвижного объекта с использованием корректирующей информации от диспетчерской станции, имеющей точные координаты в системе координат WGS-84, будет иметь величину, равную 1-2 м (Антонович К.М. Использование спутниковых радионавигационных систем в геодезии [Текст] / К.М. Антонович // ГОУ ВПО «Сибирская государственная геодезическая академия». - М.: ФГУП «Картгеоцентр», 2006. - 360 с.);
- в качестве базовых станций в системе определения местоположения подвижных объектов в режиме реального времени выступают базовые станции вышек сотовой связи, координаты которых определяются в системе координат WGS-84 с погрешностью, равной 1 м (патент RU №2331082, 10.08.2008 [4]), в связи с чем, дециметровая точность определения местоположения подвижного объекта путем уточнения его методом триангуляции от не менее трех базовых станций вышек сотовой связи не может быть достигнута;
- в блоке обработки совместной информации, поступающей с базовой станции и подвижного объекта, не вводятся региональные модели ионосферы и тропосферы. Аналогичные недостатки имеют аналогичные технические решения (патенты RU №2465729 С2, 27.10.2012 [5], RU №2469890 С2, 20.12.2012 [6], RU №2365061 С2, 20.08.2009 [7], RU №2164694 С2, 27.03.2001 [8]).
Техническая задача, решаемая также известной системой точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС, заключается в повышении точности и надежности определения местоположения (координат) подвижных объектов в режиме реального времени (патент RU 2582595 С1, 27.04.2016 [9]).
При этом поставленная задача достигается тем, что в системе точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС, включающей спутники глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO), диспетчерскую станцию, содержащую геоинформационную систему, базовую станцию, подвижные объекты, оснащенные телеметрическими терминалами, на которых установлено телекоммуникационное оборудование, обеспечивающее соединение базовой станции с подвижными объектами посредством широкополосного радиодоступа, блок обработки совместной информации, поступающей с базовой станции и подвижного объекта, согласно изобретению в ней в качестве базовой станции используется сгенерированная сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС виртуальная базовая станция, расположенная на расстоянии 4 км 300 м от соответствующего подвижного объекта, в качестве вышеупомянутого телеметрического терминала в системе используется устройство точной навигации, созданное на базе одночастотного двухсистемного кодо-фазового чипа, принимающего сигналы вышеупомянутых глобальных навигационных спутниковых систем, подключенного к малогабаритному атомному стандарту частоты, в вышеупомянутом блоке обработки совместной информации, поступающей с базовой станции и подвижного объекта, введены региональные модели ионосферы и тропосферы, созданные в режиме реального времени, генерируемые сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС.
Недостатком известной системы является то, что используется режим реального времени, т.е. базовая станция определяет поправки к фазам сигналов навигационных космических аппаратов (НКА) и передает их по УКВ связи потребителям, которые имеют приемники, измеряющие фазы тех же НКА. Данный метод ограничен дальностью видимости горизонта 15-20 км, т.к. используется частота УКВ диапазона. Базовые станции требуют гарантированного питания, поэтому расположены в местах, где это обеспечивается, что существенно уменьшает радиус их действия. Особенностью режима реального времени является то, что реальный период действия поправок составляет всего 3-5 сек. Также недостатком является использование виртуальной базовой станции, так как при этом присутствует восприимчивость к фальсификации и радиопомехам.
Задачей предлагаемого технического решения является увеличение дальности действия спутниковой навигационной системы при использовании ее в морских условиях с одновременным расширением функциональных возможностей системы в части морской мобильной спутниковой связи.
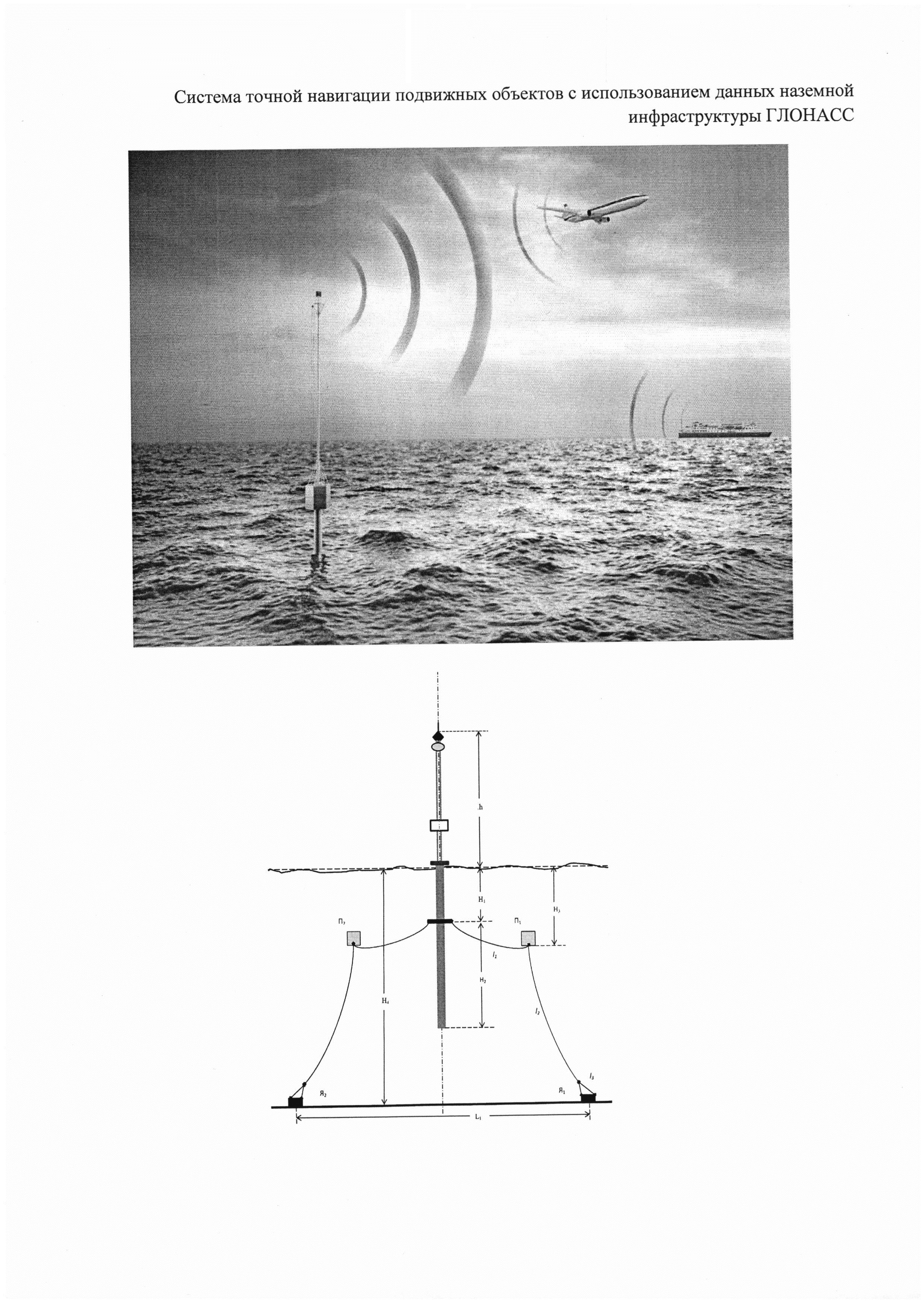
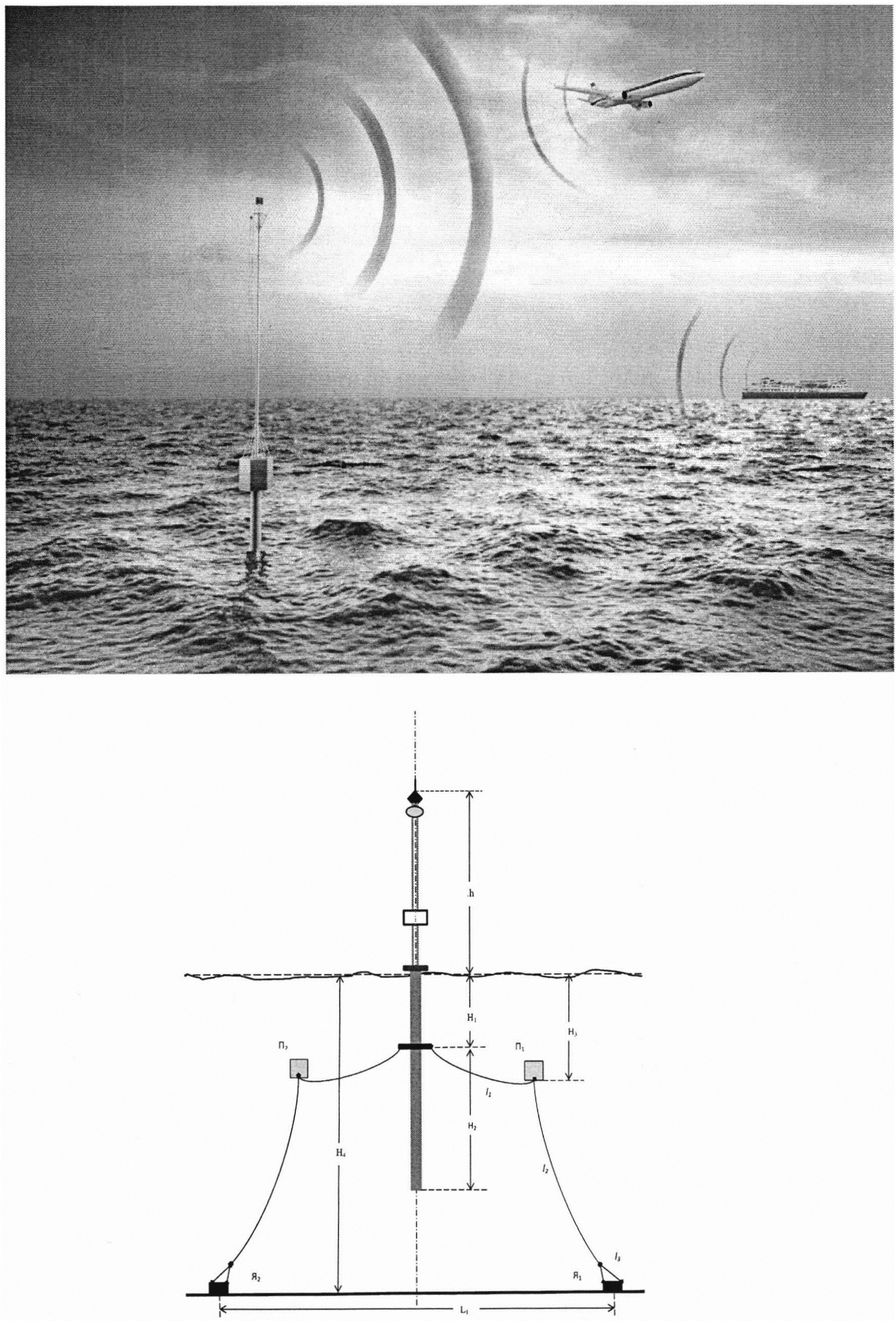
Поставленная задача решается за счет того, что в систему точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС, включающей спутники глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO), диспетчерскую станцию, содержащую геоинформационную систему, базовую станцию, подвижные объекты, оснащенные телеметрическими терминалами, на которых установлено телекоммуникационное оборудование, обеспечивающее соединение базовой станции с подвижными объектами посредством широкополосного радиодоступа, блок обработки совместной информации, поступающей с базовой станции и подвижного объекта, в качестве вышеупомянутого телеметрического терминала в системе используется устройство точной навигации, созданное на базе одночастотного двухсистемного кодо-фазового чипа, принимающего сигналы вышеупомянутых глобальных навигационных спутниковых систем, подключенного к малогабаритному атомному стандарту частоты, в вышеупомянутом блоке обработки совместной информации, поступающей с базовой станции и подвижного объекта, введены региональные модели ионосферы и тропосферы, созданные в режиме реального времени, генерируемые сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС, дополнительно на побережье и на акватории установлены ретрансляторы, причем ретранслятор, установленный на побережье, размещен в глубине побережья, а ретрансляторы на акватории расположены на расстоянии 50 км от берега вдоль побережья, при этом при передаче информации от базовой станции на ретрансляторы используют кодовые измерения длительностью 20-30 сек. Ретранслятор, установленный на акватории, выполнен в виде буя, корпус которого выполнен из напряженного железобетона и имеет надводную часть, на которой установлено телекоммуникационное оборудование.
Ввод новых элементов позволяет увеличить дальность действия и повысить надежность известной системы, а также расширить ее функциональные возможности за счет реализации канала мобильной связи.
Морская мобильная спутниковая связь в настоящее время не получает широкого распространения, по сравнению с сотовой связью на суше, по ряду причин, в основном из-за высокой стоимости оборудования и тарифов на услуги и ограниченного объема предоставляемых услуг. Стоимость устройств и тарифы для спутниковой и сотовой систем связи отличаются примерно в сто раз, а для обеспечения скоростного приема и передачи через спутники требуется громоздкое оборудование, что существенно снижает мобильность связи. В то же время сетевая наземная мобильная связь (четвертое поколение) обеспечивает практически тот же уровень услуг, что и стационарные кабельные сети.
Развертывание сетевой связи на морских акваториях затруднено из-за отсутствия надежных плавучих носителей ретрансляционной аппаратуры. Используемые в настоящее время для морских работ заякоренные буи подвержены сильному влиянию волнения, ветра и течений, не имеют достаточно мощных источников электропитания, и поэтому не могут использоваться для размещения базовой сотовой трансляционной аппаратуры. В то же время имеется опыт создания и эксплуатации так называемых стационарных стабилизированных морских буев. Эти буи использовались в 60-х - 80-х годах прошлого века в основном для решения оборонных задач и представляли собой вертикальные стальные цилиндры длиной около 50 м и весом до 100 т, со специальной системой якорей, исключающей вращение вокруг оси. Такие буи имели высокую остойчивость и служили хорошей основой для различной аппаратуры, в основном гидроакустической.
Признаки ограничительной части формулы изобретения могут быть реализованы аналогично прототипу [9], посредством следующих средств и элементов: спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO); двухчастотных мультисистемных ГНСС приемников, принимающих сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO); оптоволоконных каналов связи; локальной сети Интернет; сервера сбора информации с двухчастотных мультисистемных ГНСС приемников, принимающих сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO); персонального компьютера с сетевым программным обеспечением; наземной инфраструктуры ГЛОНАСС; одночастотного двухсистемного кодо-фазового чипа, принимающего сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO); блока обработки информации, поступающей с наземной инфраструктуры ГЛОНАСС и одночастотного двухсистемного кодо-фазового чипа, подключенного к малогабаритному атомному стандарту частоты; малогабаритных атомных стандартов частоты; телекоммуникационного оборудования, для приема и передачи данных между устройством точной навигации и наземной инфраструктурой ГЛОНАСС; телекоммуникационного оборудования, для передачи данных между устройством точной навигации и диспетчерской станцией; устройства точной навигации; сервера диспетчерской станции; персонального компьютера с геоинформационной системой; диспетчерской станции; региональных моделей тропосферы и ионосферы, сгенерированные сетевым программным обеспечением.
Дополнительно на побережье и на акватории установлены ретрансляторы, причем ретранслятор, установленный на побережье, размещен в глубине побережья, а ретрансляторы на акватории расположены на расстоянии 50 км от берега вдоль побережья, при этом при передаче информации от базовой станции на ретрансляторы используют кодовые измерения длительностью 20-30 сек. Ретранслятор, установленный на акватории, выполнен в виде буя, корпус которого выполнен из напряженного железобетона и имеет надводную часть, на которой установлено телекоммуникационное оборудование. Ретранслятор, установленный на акватории, выполнен в виде буя, корпус которого выполнен из напряженного железобетона и имеет надводную часть, на которой размещено телекоммуникационное оборудование.
Внешний вид ретранслятора, установленного на акватории, показан на чертеже.
Общая длина буя 45 м.
Подводная часть: длина 30 м; диаметр 2,4 м. Надводная часть: длина корпуса 3 м; мачты 12 м. Размер мачты в плане в осях: 1.6 м × 1.6 м. Общая масса буя 103,6 т. Масса мачты 6,1 т. Плавучесть 31 т; расстояние между центрами плавучести и массы 3 м. Высота столба балласта (вода) ≈ 10 м. Собственные частоты колебаний буя:
вертикальные 0,09 Гц; наклонные 0,05 Гц. Собственные частоты деформации всей конструкции (приборная нагрузка 400 кг), 1, 2) 5,73 Гц; 3, 4) 11,7 Гц; 5) 17,98 Гц; 6, 7) 23,82 Гц; 8) 25,52 Гц; 9, 10) 33,22 Гц. Усталостная нагрузка буя (срок 10 лет):
2,5⋅106 циклов при обеспеченности 0.995 для надводной части и 0,999 для подводной.
Предлагаемая система работает следующим образом.
Каждое из устройств точной навигации, установленных на подвижном объекте, принимает сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO) с помощью одночастотного двухсистемного кодо-фазового чипа, подключенного к малогабаритному атомному стандарту частоты. Принятые одночастотным двухсистемным кодо-фазовым чипом, подключенным к малогабаритному атомному стандарту частоты, сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO) поступают в блок обработки информации, в котором происходит вычисление приближенных координат подвижного объекта в системе WGS-84, на основе абсолютного метода ГНСС - позиционирования путем решения обратной линейной засечки. Эти координаты передаются с помощью телекоммуникационного оборудования, установленного на подвижном объекте, по широкополосному радиодоступу на сервер сбора информации с двухчастотных мультисистемных ГНСС приемников, принимающих сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO), наземной инфраструктуры ГЛОНАСС.
Сетевое программное обеспечение, установленное на персональном компьютере, по средствам локальной сети Интернет соединяется с сервером сбора информации с двухчастотных мультисистемных ГНСС приемников, принимающих сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO), для получения приближенных координат подвижного объекта в режиме реального времени. Сетевое программное обеспечение, установленное на персональном компьютере, на основе приближенных координат подвижного объекта и данных наземной инфраструктуры ГЛОНАСС, включая ретрансляторы, рассчитывает для каждого подвижного объекта корректирующую информацию и региональные модели тропосферы и ионосферы.
Для расчета корректирующей информации и региональной модели тропосферы и ионосферы с помощью наземной инфраструктуры ГЛОНАСС в сетевое программное обеспечение из сервера сбора информации поступает измерительная информация, полученная по средствам оптоволоконного канала связи, от двухчастотных мультисистемных ГНСС приемников, принимающих сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO).
Корректирующая информация и региональные модели тропосферы и ионосферы, сгенерированные сетевым программным обеспечением, передаются в устройство точной навигации, где регистрируются телекоммуникационным оборудованием, установленным на подвижном объекте. Затем корректирующая информация от базовой станции, транслируемая через ретрансляторы, региональные модели тропосферы и ионосферы, а также измерительная информация с одночастотного двухсистемного кодо-фазового чипа, подключенного к малогабаритному атомному стандарту частоты, поступают в блок обработки информации, в котором происходит вычисление точных координат подвижного объекта в системе WGS-84. Вычисленные блоком обработки информации точные координаты подвижного объекта в системе WGS-84 передаются с помощью телекоммуникационного оборудования в диспетчерскую станцию. Точные координаты подвижного объекта в системе WGS-84 хранятся на сервере диспетчерской станции. С сервера диспетчерской станции точные координаты передаются в геоинформационную систему, установленную на персональном компьютере, в которой визуализируется местоположение подвижного объекта.
Технический результат, достигаемый заявляемой системой точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС, заключается в повышении достоверности информации о местоположении подвижного объекта в режиме реального времени.
Источники информации
Рушкевич А., Осадчий В. Мониторинг подвижных объектов: российские реалии и технические инновации [Текст] / А. Рушкевич, В. Осадчий // Беспроводные технологии. - 2010. - №3. - С 56-60.
К.М. Антонович // ГОУ ВПО «Сибирская государственная геодезическая академия». - М: ФГУП «Картгеоцентр», 2006. - 360 с.
Патент RU №2444705, 10.03.2012.
Патент RU №2331082, 10.08.2008.
Патент RU №2465729 С2, 27.10.2012.
Патент RU №2469890 С2, 20.12.2012.
Патент RU №2365061 С2, 20.08.2009.
Патент RU №2164694 С2, 27.03.2001.
Патент RU 2582595 С1, 27.04.2016.
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью

