Результат интеллектуальной деятельности: УСТРОЙСТВО РАСПОЗНАВАНИЯ НЕМАНЕВРИРУЮЩЕЙ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано в радиолокационных станциях (РЛС) для распознавания неманеврирующих баллистических целей (БЦ).
Известны устройства и способы распознавания летательных аппаратов (ЛА) по траекторным признакам, к которым относятся значения скорости, ускорения, высоты, а для БЦ - координаты ожидаемых точек падения. К недостаткам этих способов и устройств следует отнести возможность перекрытия траекторных признаков баллистических и аэродинамических целей (БЦ и АЦ) по высоте и по скорости. Кроме того, к РЛС предъявляются высокие требования к точности измерения параметров движения БЦ и АЦ при ограниченном времени наблюдения. Эти требования проблематично реализовать при грубых измерениях азимута и угла места [1, С. 4-5].
Наиболее близким аналогом заявленному устройству, то есть прототипом, является устройство, описанное в патенте №2510861, в котором реализован способ радиолокационного определения времени окончания активного участка баллистической траектории (АУТ) по фиксированным выборкам квадратов дальности [2].
Достоинством прототипа является высокая вероятность определения времени окончания активного участка баллистической траектории по фиксированным выборкам квадратов дальности в РЛС с грубыми измерениями угла места и азимута. Это позволяет не допустить появления методических ошибок прогноза баллистической траектории (недолет или перелет).
Принцип работы устройства-прототипа поясняется на примере схемы устройства определения времени окончания АУТ по фиксированной выборке из 5-ти квадратов дальности, приведенной в фиг. 1.
В РЛС измеряют дальность в цифровом виде, производят перемножение этих сигналов в блоке 1 и получают квадраты дальности, которые подают на вход запоминающего устройства (ЗУ), состоящего из последовательно соединенных элементов задержки на период обзора T0. С выходов ЗУ эти сигналы подают на входы блока 2.2, где умножают их на весовые коэффициенты оценки второго приращения квадрата дальности. В итоге на входе сумматора 2.3 формируют фиксированную выборку взвешенных сигналов, или «скользящее окно». На выходе сумматора, то есть на выходе цифрового нерекурсивного фильтра (ЦНРФ), получают оценку второго приращения квадрата дальности  путем оптимального взвешенного суммирования квадратов дальности. Затем эту оценку делят в блоке 3 на период обзора РЛС во второй степени
путем оптимального взвешенного суммирования квадратов дальности. Затем эту оценку делят в блоке 3 на период обзора РЛС во второй степени  и получают оценку ускорения по квадрату дальности
и получают оценку ускорения по квадрату дальности  Далее в блоке 5 вычисляют среднеквадратическую ошибку (СКО) оценки ускорения по квадрату дальности:
Далее в блоке 5 вычисляют среднеквадратическую ошибку (СКО) оценки ускорения по квадрату дальности:  где σr - СКО измерения дальности.
где σr - СКО измерения дальности.
В каждом новом положении «скользящего окна» сравнивают в пороговом устройстве (блок 4) оценку ускорения по квадрату дальности с СКО. Если  , то принимают решение о наличии маневра, то есть о нахождении цели на активном участке траектории. Решение об окончании маневра, то есть об окончании АУТ и начале пассивного участка траектории (ПУТ), принимают в момент времени, когда ускорение становится положительным и больше СКО, то есть
, то принимают решение о наличии маневра, то есть о нахождении цели на активном участке траектории. Решение об окончании маневра, то есть об окончании АУТ и начале пассивного участка траектории (ПУТ), принимают в момент времени, когда ускорение становится положительным и больше СКО, то есть  .
.
К недостаткам прототипа следует отнести неоднозначность распознавания. При нахождении летательного аппарата (ЛА) на АУТ его можно отнести как к классу БЦ, так и к классу маневрирующих АЦ на участке разгона, так как ускорение в обоих случаях отрицательно. При нахождении ЛА на ПУТ его можно отнести как к классу БЦ, так и к классу неманеврируюших АЦ на линейной траектории, так как ускорение в обоих случаях положительно.
Техническим результатом изобретения является устранение неоднозначности распознавания неманеврирующей БЦ.
Указанный технический результат достигается тем, что заявленное устройство распознавания неманеврирующей баллистической цели по фиксированной выборке квадратов дальности содержит, как и прототип, последовательно соединенные умножитель входных сигналов и цифровой нерекурсивный фильтр, состоящий из последовательно соединенных запоминающего устройства, блока умножителей квадратов дальности на весовые коэффициенты и сумматора, а также последовательно соединенные вычислитель СКО и пороговое устройство. В отличие от прототипа, согласно изобретению, в ЦНРФ дополнительно введены последовательно соединенные с запоминающим устройством второй блок умножителей квадратов дальности на весовые коэффициенты и второй сумматор. Выход второго сумматора, являющийся вторым выходом ЦНРФ, подключен к первому входу дополнительно введенного второго порогового устройства (ПУ2), второй вход которого подключен к выходу вычислителя СКО. Первый выход ПУ2 подключен ко второму входу дополнительно введенной третьей схемы совпадения, а второй выход соединен со вторыми входами дополнительно введенных первой и второй схем совпадения. Выход сумматора, то есть первый выход ЦНРФ, подключен к первому входу порогового устройства, первый выход которого соединен с первыми входами первой и третьей схем совпадения, а второй выход подключен к первому входу второй схемы совпадения. Выходы схем совпадения являются выходами заявленного устройства.
Сущность заявляемого изобретения поясняется схемой устройства распознавания неманеврирующей БЦ по выборке из 5-ти квадратов дальности, приведенной в фиг. 2, где введены следующие обозначения:
1 - умножитель входных сигналов дальности;
2 - цифровой нерекурсивный фильтр (ЦНРФ);
2.1 - запоминающее устройство (ЗУ);
2.2 - блок умножителей квадратов дальности на весовые коэффициенты;
2.3 - сумматор;
2.4 - второй блок умножителей квадратов дальности на весовые коэффициенты;
2.5 - второй сумматор;
3 - пороговое устройство (ПУ);
4 - второе пороговое устройство (ПУ2);
5 - вычислитель СКО;
6 - третья схема совпадения;
7 - вторая схема совпадения;
8 - первая схема совпадения.
Заявляемое устройство работает следующим образом.
Так же, как в прототипе, в умножителе 1 перемножают поступающие на его вход цифровые сигналы дальности, получают квадраты дальности и подают их на вход запоминающего устройства (блок 2.1) ЦНРФ. Затем умножают эти квадраты дальности на весовые коэффициенты в блоке 2.1 и подают на входы сумматора. В отличие от прототипа, на выходе сумматора получают разность оценок второго приращения квадрата дальности по выборкам из N и N-m квадратов дальности, δN,N-m. При этом начало выборок совпадают с началом «скользящего окна»:

где оценка второго приращения квадрата дальности вычисляется по формуле [3, С. 115]:

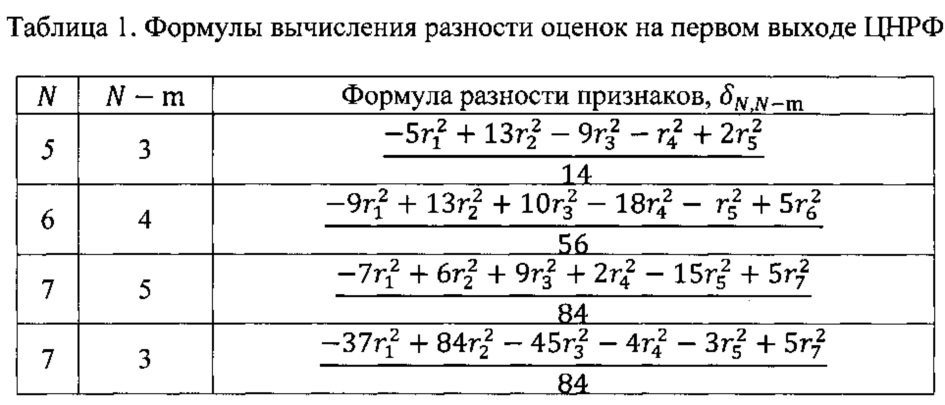
По формулам (1) и (2) вычисляют разности оценок при любых объемах N и N-m выборок. Эти разности соответствуют разности оценок второго приращения квадрата дальности в соседних точках «скользящего окна» (траектории), удаленных друг от друга на m обзоров. В качестве примера, в табл. 1 приведены готовые формулы для выборок от 3-х до 7-ми квадратов дальности. По такому алгоритму работает обнаружитель маневра на линейной траектории.
На втором выходе ЦНРФ получают разности оценок второго приращения квадрата дальности в середине «скользящего окна». При этом начало и конец выборки меньшего объема удалены от начала и конца выборки большего объема, то есть от границ «скользящего окна», на равное число k обзоров:

В качестве примера, в табл. 2 приведены готовые формулы для выборок от 3-х до 8-ми квадратов дальности.
Далее значения абсолютных разностей оценок с первого и второго выходов ЦНРФ делят в пороговых устройствах (блоки 3 и 4) на среднеквадратическую ошибку σδ определения этой разности и сравнивают с порогом П, величину которого выбирают в соответствии с заданной вероятностью обнаружения маневра. Например, при П=1 вероятность равна 0,68, а при П=2 - вероятность равна 0,95 [5, С. 92-93]. Формулы вычисления СКО приведены в табл. 2.
По такому же принципу работает обнаружитель маневра БЦ на пассивном участке траектории по фиксированной выборке произведений дальности на радиальную скорость [4].
В заявляемом устройстве распознавание осуществляется за счет совместной работы (комплексировании) этих двух обнаружителей маневра. Оно работает по следующему алгоритму:



Для реализации этого алгоритма в заявленное устройство введены три схемы совпадения (блоки 6, 7 и 8).
При выполнении неравенств (3а) на выходе 1-й схемы совпадения (блок 8) выдается сообщение о том, что наблюдаемая цель является неманеврирующей баллистической целью. При этом левое неравенство обеспечивает однозначную селекцию неманеврирующей БЦ от всех маневрирующих ЛА, в том числе от маневрирующих БЦ. Правое неравенство обеспечивает однозначную селекцию неманеврирующей БЦ от всех неманеврирующих ЛА на линейной траектории.
При выполнении неравенств (3б) на выходе 2-й схемы совпадения (блок 7) выдается однозначное сообщение о том, что наблюдаемая цель является неманеврирующим небаллистическим ЛА. В зависимости от высоты и скорости это могут быть самолеты, гиперзвуковые крылатые ракеты (ГЗКР), искусственные спутники Земли (ИСЗ) и т.д.
При выполнении неравенств (3в) на выходе 3-й схемы совпадения (блок 6) выдается сообщение о том, что наблюдаемая цель является маневрирующим ЛА. При этом выявляются все типы маневра (по скорости, по курсу, по высоте, по скорости и курсу и др.). Для уточнения типа объекта нужно использовать дополнительные траекторные или сигнальные признаки.
Для доказательства реализуемости заявленного технического результата в табл. 1 приведены результаты оценки вероятности распознавания тактической баллистической ракеты (ТБР) по выборкам из 7-ми и 5-ти квадратов дальности в РЛС метрового диапазона с грубыми измерениями угла места (σε=1,5°), и высокоточными измерениями дальности (σr=50 м).
Вероятности отсутствия маневра на ПУТ и обнаружения маневра на линейной траектории определяются по таблицам интеграла вероятностей [5, С. 92-93]:

Вероятность распознавания неманеврирующей БЦ вычисляется по правилу умножения вероятностей: pрасп=pлин⋅(1-pПУТ).
Как видно, из 1-й и 2-й строк таблицы, значения высоты и скорости ТБР, самолетов и ГЗКР перекрываются. Поэтому использовать известные способы нельзя. В заявляемом устройстве обеспечивается высокая вероятность распознавания (pрасп=0,8-0,9) через 30 секунд после окончания активного участка траектории. При малых высотах вероятность распознавания уменьшается из-за сопротивления воздуха.
На больших высотах сопротивление воздуха практически не оказывает влияния на вероятность распознавания. Поэтому баллистические ракеты средней дальности (БРСД) распознаются на фоне неманеврирующих и маневрирующих искусственных спутников Земли и других низкоорбитальных космических объектов.
Таким образом, введение в устройство, содержащее умножитель входных сигналов, ЦНРФ, состоящий из запоминающего устройства, блока умножителей квадратов дальности на весовые коэффициенты и сумматора, вычислитель СКО и пороговое устройство, второго умножителя и второго сумматора, входящих в ЦНРФ, а также второго порогового устройства и трех схем совпадения с соответствующими связями, позволило достичь заявленного технического результата: устранение неоднозначности распознавания неманеврирующей баллистической цели.
Список использованных источников
1. Методы радиолокационного распознавания и их моделирование / Я.Д. Ширман, С.А. Горшков, С.П. Лещенко, Г.Д. Братченков, В.М. Орленко // Зарубежная радиоэлектроника, №11, 1996 г. - С. 3-63.
2. Патент RU №2510861. Способ радиолокационного определения времени окончания активного участка баллистической траектории. Опубликовано 05.02.2014.
3. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986. - 352 с.
4. Патент RU №2524208. Способ радиолокационного обнаружения маневра баллистической цели на пассивном участке траектории. Опубликовано 03.06.2014.
5. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. М:. «Наука», 1980. - 544 с.
Устройство распознавания неманеврирующей баллистической цели по фиксированной выборке квадратов дальности, содержащее последовательно соединенные умножитель входных сигналов дальности, цифровой нерекурсивный фильтр (ЦНРФ), состоящий из последовательно соединенных запоминающего устройства, блока умножителей квадратов дальности на весовые коэффициенты и сумматора, а также вычислитель среднеквадратической ошибки (СКО), вход которого подключен к входным сигналам дальности, а выход - ко второму входу порогового устройства, отличающееся тем, что в ЦНРФ дополнительно введены последовательно соединенные с запоминающим устройством второй блок умножителей квадратов дальности на весовые коэффициенты и второй сумматор, выход которого, являющийся вторым выходом ЦНРФ, подключен к первому входу дополнительно введенного второго порогового устройства, второй вход которого подключен к выходу вычислителя СКО, первый выход подключен ко второму входу дополнительно введенной третьей схемы совпадения, а второй выход соединен со вторыми входами дополнительно введенных первой и второй схем совпадения, выход сумматора, то есть первый выход ЦНРФ, подключен к первому входу порогового устройства, первый выход которого соединен с первыми входами первой и третьей схем совпадения, а второй выход подключен к первому входу второй схемы совпадения, выходы схем совпадения являются выходами заявляемого устройства.
Устройство первичной обработки радиолокационной информации
Способ закалки тонкостенных длинномерных деталей из стали 12х2нвфа в управляемом потоке воздуха
Способ построения компактных делителей мощности свч сигналов
Мобильный радиолокационный комплекс для обнаружения средств поражения и противодействия этим средствам
Способ и устройство определения модуля скорости баллистического объекта с использованием выборки квадратов дальности
Способ радиолокационного сопровождения объектов и рлс для его реализации
Полосно-заграждающий фильтр на несимметричной полосковой линии с использованием элементов фильтра нижних частот
Устройство распознавания воздушно-космических объектов в двухдиапазонных радиолокационных комплексах с активными фазированными антенными решетками (афар)
Муфта с осевым перемещением одной из полумуфт
Способ и устройство защиты от "ангелов" при комплексировании рлс разных диапазонов
Способ радиолокационного определения вертикальной скорости баллистического объекта и устройство для его реализации
Способ и устройство определения модуля скорости баллистического объекта с использованием выборки квадратов дальности
Способ радиолокационного сопровождения объектов и рлс для его реализации
Устройство распознавания воздушно-космических объектов в двухдиапазонных радиолокационных комплексах с активными фазированными антенными решетками (афар)
Способ и устройство защиты от "ангелов" при комплексировании рлс разных диапазонов
Способ определения модуля скорости неманеврирующей аэродинамической цели по выборкам измерений дальности
Способ обнаружения и сопровождения воздушных целей радиолокационным комплексом
Многодиапазонный радиолокационный комплекс
Устройство первичной обработки сигналов радиолокационной станции, использующей две последовательности зондирующих импульсов
Амплитудный одноканальный многочастотный пеленгатор шумовых активных помех

